3.1. Mathematical Model of VSDA
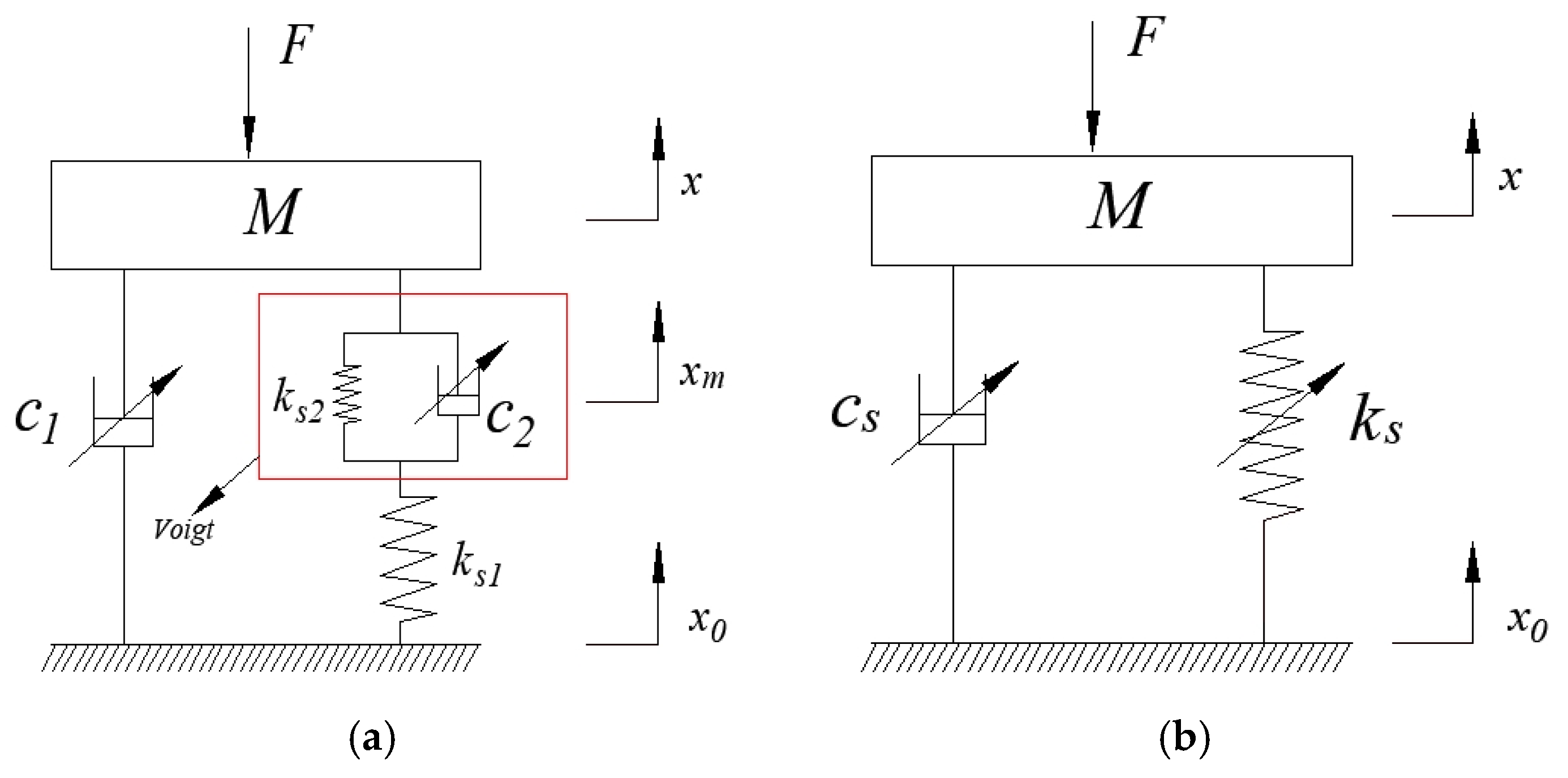
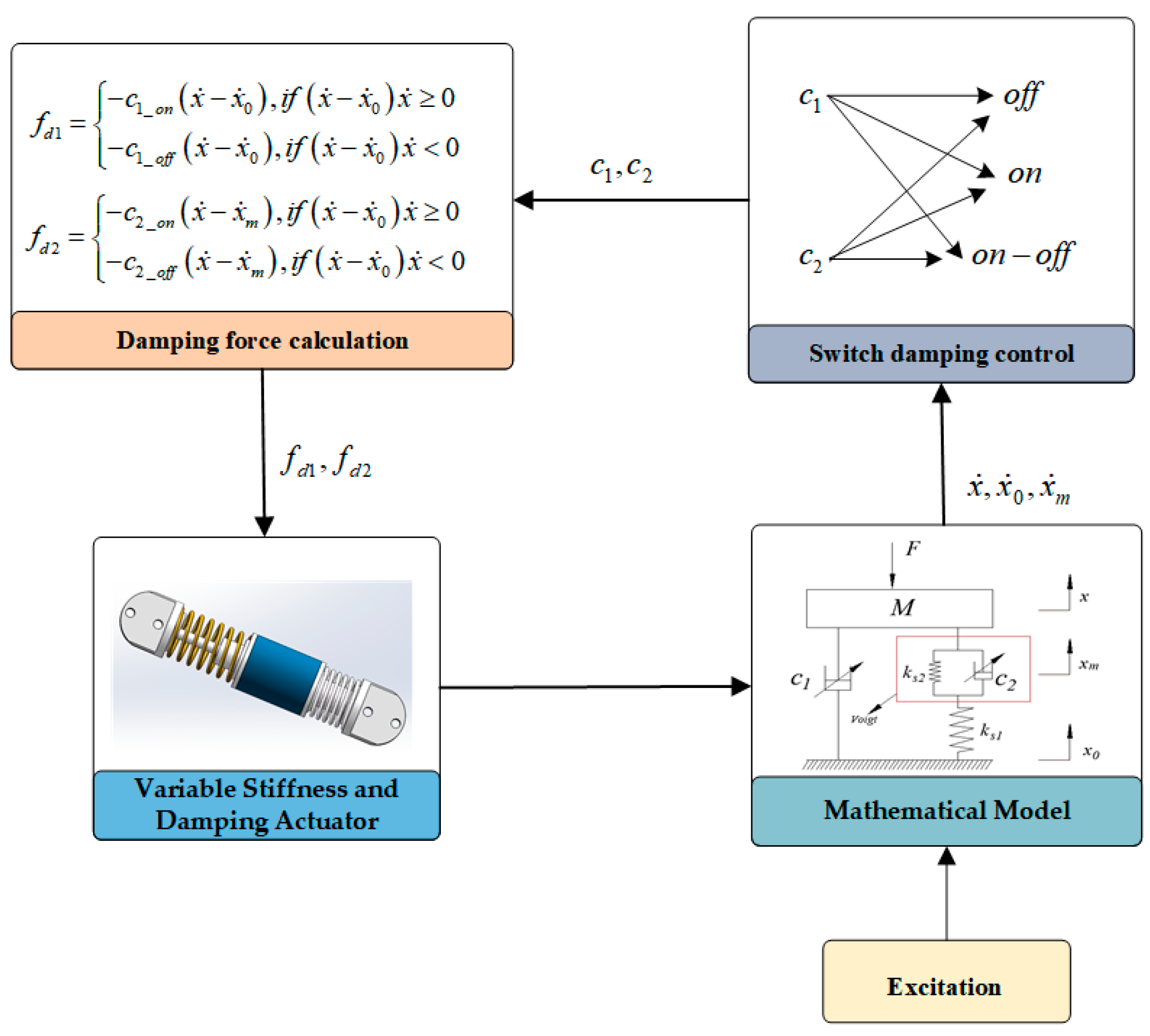
We can simplify the calf of the lower limb exoskeleton rehabilitation robot into a single-degree-of-freedom vibration model, as shown in
Figure 4a. This structure, unlike traditional robot calves, not only avoids the impact of pure rigid body structures but also adds a
Vogit unit to the existing spring and damping structure. The
Vogit unit, composed of a spring and damping in parallel, is then connected in series with the original spring, enabling simultaneous adjustment of the stiffness and damping of the robot calf. The VSDA model consist of two controllable damping MRDs and two fixed-stiffness coil springs. The MRD
c2 and coil spring
ks2 are connected in parallel to form the
Vogit unit, which is then connected in series with the coil spring
ks1. Subsequently, the
Vogit unit is connected in parallel with the MRD
c1. Here,
M represents the mass of the human body,
F denotes the excitation force applied by the human to the VSDA,
x is the displacement of the human body,
xm indicates the displacement of the VSDA, and
x0 represents the displacement of the ground.
Based on Newton’s second law and vibration theory, the motion differential equation for the model shown in
Figure 4a can be established as follows:
In the above equation, , , and represent the velocities of the person, the variable stiffness and damping actuator, and the ground, respectively. denotes the acceleration of the person.
When considering only ground excitation, i.e.,
F = 0, with input consisting of ground input displacement and ground excitation velocity, and output consisting of vertical acceleration and displacement of the human body, by applying Laplace transform to Equations (1) and (2), we can obtain the transfer function between the displacement of the human body and the displacement of the ground as follows:
The transfer function between the acceleration of the human body and the velocity of the ground is given by
When considering only the force excitation on the human body, i.e.,
= 0, by applying Laplace transform to Equations (1) and (2), we can obtain the transfer function between the displacement of the human body and the input force as follows:
The transfer function between the acceleration of the human body and the input force is given by
Substituting
s =
jω into Equations (3) and (5), we can obtain
Figure 4b represents a simplified version of
Figure 4a, corresponding to its equivalent model. Similarly, based on Newton’s second law and vibration theory, the motion differential equation for the equivalent model shown in
Figure 4b can be established as follows:
In the equation, and represent the equivalent damping coefficient and equivalent stiffness coefficient of the VSDA, respectively.
Similarly, when considering only ground excitation, i.e.,
F = 0, by applying Laplace transform to Equation (9), we can obtain the transfer function of the human body displacement as follows:
When considering only force excitation on the human body, i.e.,
= 0, by applying Laplace transform to Equation (9), we can obtain the transfer function between the human body displacement and the force as follows:
Substituting
s =
jω into Equations (10) and (11), we can obtain
By comparing Equations (5) and (6) with Equations (10) and (11), we can derive the expressions for the equivalent stiffness coefficient and equivalent damping coefficient corresponding to the equivalent model of the variable stiffness and damping actuator as follows:
From the expression of the equivalent stiffness coefficient (12), it can be observed that the value of is related to the MRD c2 and is independent of MRD c1. The effective stiffness of the system can be adjusted by the MRD c2. When c2 tends to infinity, the equivalent stiffness is equivalent to the stiffness of the series connection of and , i.e., = /; when c2 tends to zero, the equivalent stiffness is equivalent to the stiffness of the spring , i.e., = . Thus, the variable stiffness range of the entire system is [/,]. From the expression of the equivalent damping coefficient (13), it can be seen that when c2 tends to infinity, = c1; when c2 gradually approaches infinity from zero, first increases and then decreases, but it always remains greater than c1. Hence, although the change in the equivalent damping coefficient is achieved jointly by the MRDs and c2, c1 actually plays a decisive role in the variation of .
3.2. Design of VSDA Structure
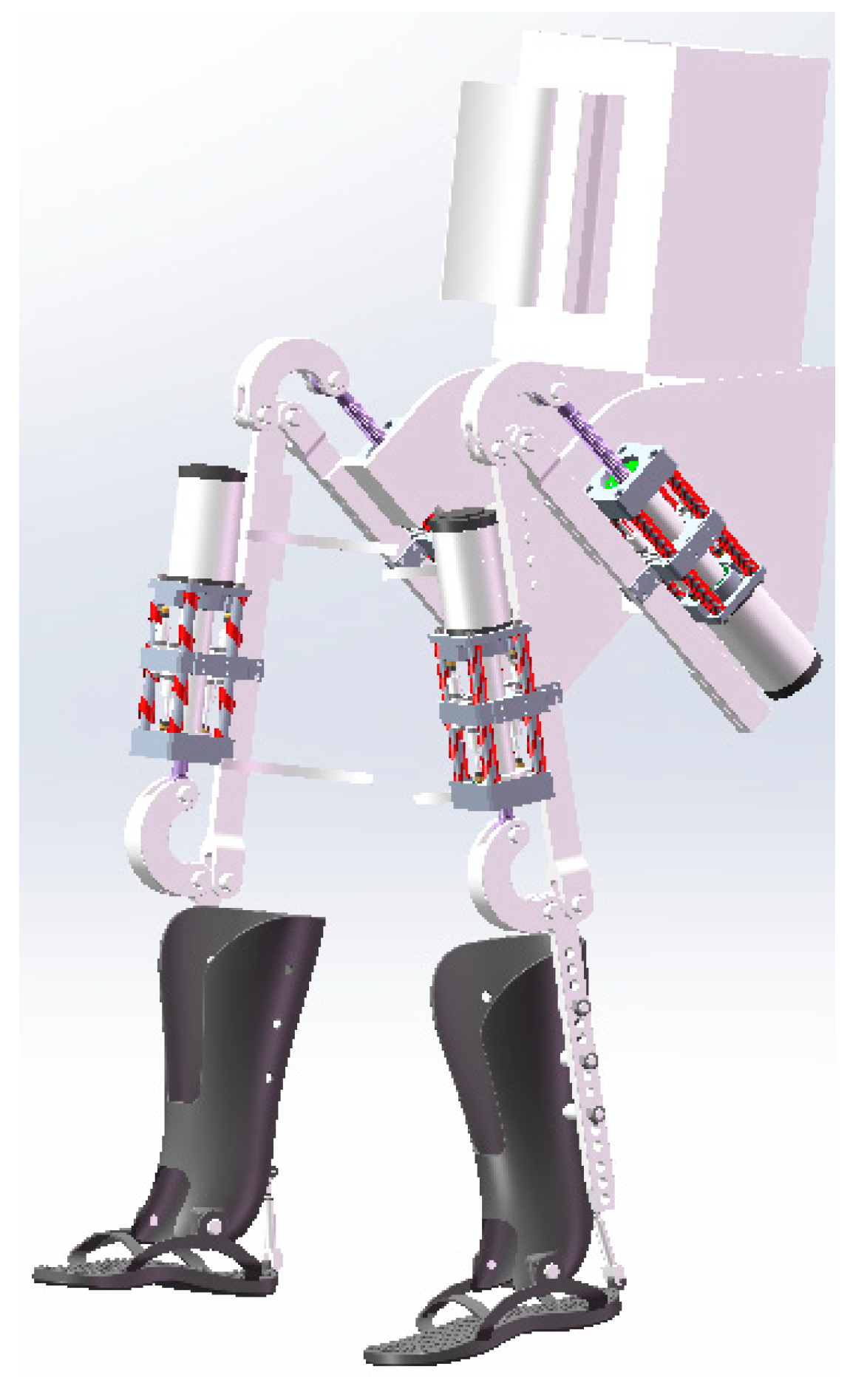
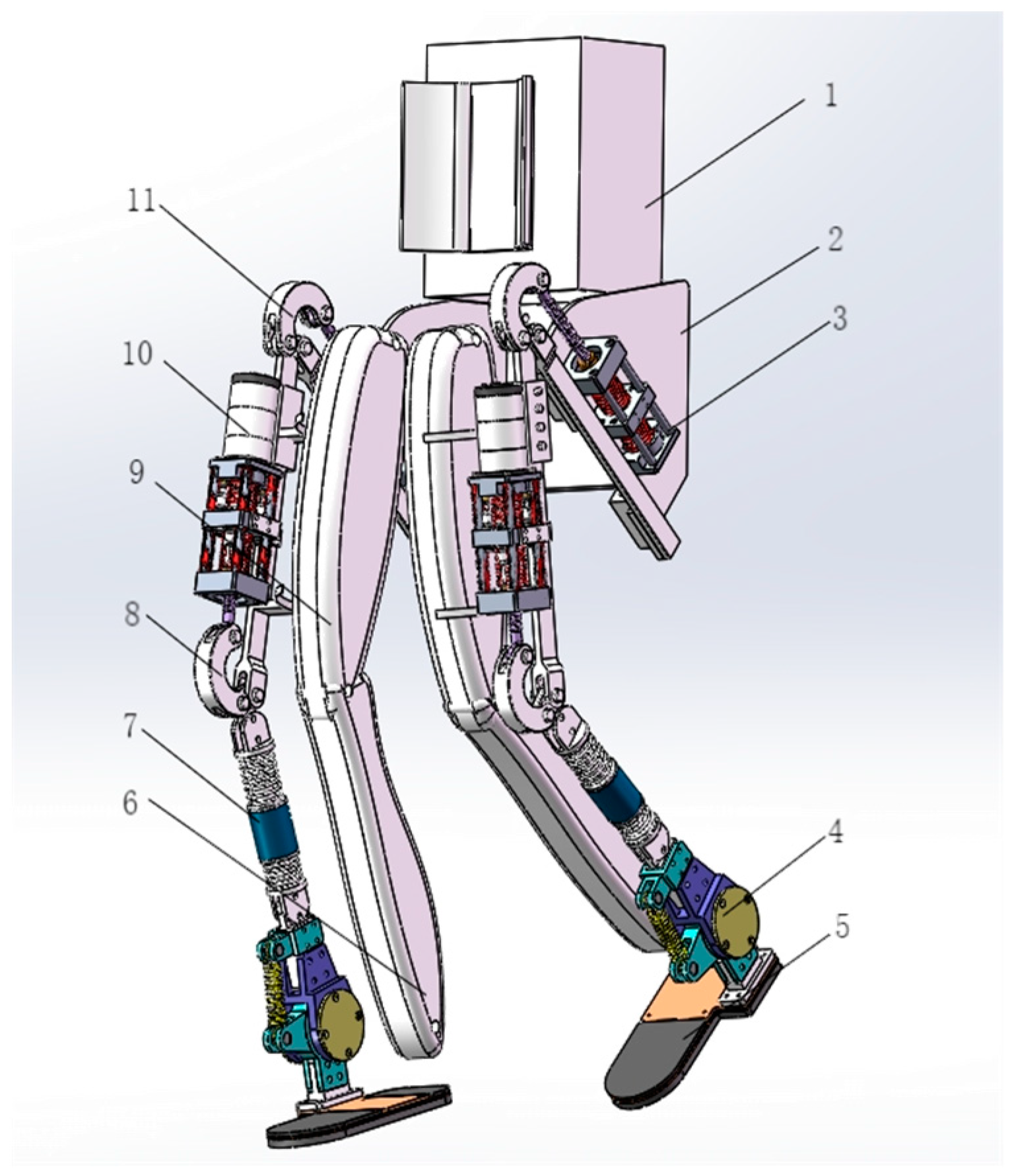
The design of lower limb exoskeleton rehabilitation robots needs to mimic the natural movements of the human lower limbs and provide necessary assistance when needed. Therefore, the structural design needs to consider the degrees of freedom of the knee joint, hip joint, and ankle joint, and ensure that the robot can provide sufficient range and flexibility. The overall structure of the lower limb exoskeleton rehabilitation robot is shown in
Figure 5.
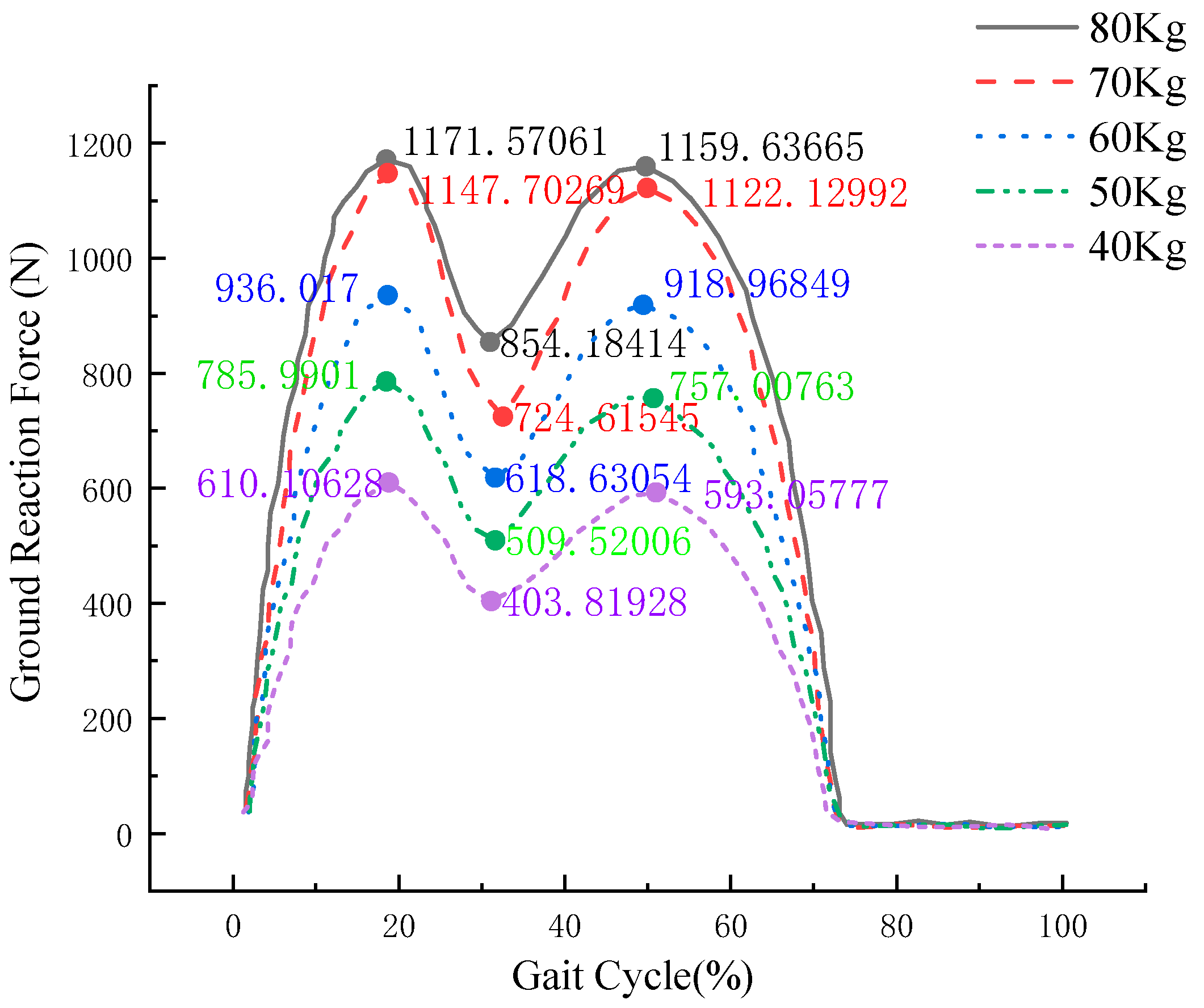
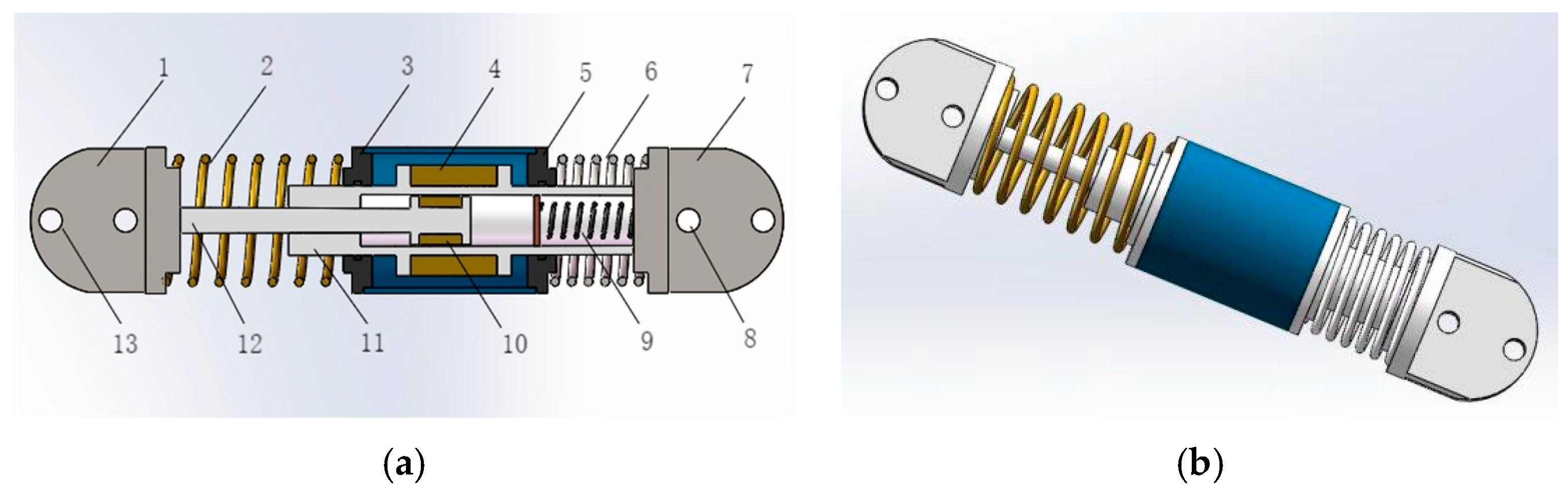
Through our previous research, we demonstrated that increasing the stiffness coefficient enhances the system’s impact resistance. However, it also leads to a larger output bandwidth and output impedance value, resulting in a near-rigid connection between the actuator and the load, consequently weakening the system’s stability. Conversely, increasing the damping coefficient improves system stability, but higher damping coefficients reduce the wearer’s comfort when using the exoskeleton. Based on the design of the overall structure of the lower limb exoskeleton rehabilitation robot and considering the human gait GRF curve obtained from previous experiments, the maximum ground reaction force experienced is approximately 1.4 times the body weight. To meet the usage requirements of a broader range of wearers, the variable stiffness and damping actuator should withstand a higher maximum pressure. This helps prevent the occurrence of the spring bottoming out, which could potentially harm the wearer. However, while meeting the maximum pressure requirement, the flexibility of walking should also be considered. Therefore, it is essential to select optimal parameters that match the human body. This paper primarily analyzes the variable stiffness and damping actuator of the calf, as shown in
Figure 6.
From the above diagram, it can be observed that the VSDA mainly consists of two MRDs with different damping coefficients and two springs with different stiffness coefficients. MRD-1 primarily comprises an upper connector, a lower connector, a piston rod, seal rings, an energy storage spring, electromagnetic coils, and magnetorheological fluid. The upper connector primarily links to the knee joint, while the lower connector connects to the ankle joint. Both connectors feature length-adjustment holes to accommodate individuals with varying leg lengths. MRD-2 mainly consists of magnetorheological fluid, electromagnetic coils, and a housing. It is primarily mounted on MRD-1, allowing for sliding on MRD-1 while isolating spring 1 and spring 2.
3.2.1. VSDA Working Principle
Based on the mathematical model and structural diagram of the variable stiffness and damping actuator, it can be observed that the structure mainly has two connection modes. When the current applied to the MRD-2 is sufficiently small, it is in connection mode 1. In this mode, MRD-2 can slide relative to MRD-1, causing both spring 1 and spring 2 to deform, forming a series mechanism. When the current applied to MRD-2 is sufficiently large, it enters connection mode 2, preventing sliding relative to MRD-1, resulting in a static state. In this case, external excitation will only cause deformation in spring 1. Therefore, the variable stiffness system of the entire structure adjusts the damping value by changing the current magnitude applied to MRD-2, ultimately altering the stiffness coefficient by changing the spring connection mode. Meanwhile, the variable damping system is adjusted by modulating the current applied to MRD-1.
3.2.2. Selection of VSDA
Based on the principles of ergonomics and in accordance with the Chinese national standard GB10000-88, the 95th percentile of adult males aged 18–60 was selected and functionally adjusted [
27]. The thigh length is 505 mm, and the shin length is 403 mm. Considering that the ankle joint of the lower limb exoskeleton rehabilitation robot designed in this paper is slightly larger than the normal human body size and taking into account assembly errors, the designed length of the shin is within the adjustment range of 300~350 mm while ensuring that the total length from the sole to the knee joint remains unchanged. The selection of MRDs is shown in
Table 1, and the selection of mold springs is shown in
Table 2.
The magnetic fluid used in MRD-1 is MRF-A172. MRF-A172 is an oil-based magnetic fluid composed of micrometer-sized soft magnetic particles suspended in a carrier fluid. When subjected to an external magnetic field, the MRF-A172 magnetic fluid can instantly transform from a free-flowing liquid to a viscoelastic solid-like substance with controllable yield strength. The viscosity or yield strength of the fluid can be controlled by adjusting the intensity of the external magnetic field. The piston stroke of MRD-1 is 22 mm, with an outer cylinder diameter of 24 mm. The current adjustment range is 0~1.6 A, and the damping force output range is 80~800 N. The magnetic fluid used in MRD-2 is the same as that used in MRD-1. It has a piston stroke of 14 mm, a cylinder length of 80 mm, and an outer cylinder diameter of 50 mm. The current adjustment range is 0~1.6 A, and the damping force output range is 200~1700 N. Referring to ISO10243 (International Standard) [
28], the parameters of the springs are selected. Spring 1 is a die spring with a total length of 60 mm, an outer diameter of 50 mm, an inner diameter of 25 mm, a maximum compression rate of 40%, a maximum compression force of 2117 N, and it is made of 55SiCr alloy steel. Spring 2 is also a die spring with a total length of 30 mm, an outer diameter of 50 mm, an inner diameter of 25 mm, a maximum compression rate of 50%, a maximum compression force of 206 N, and it is made of 55SiCr alloy steel.
3.3. The Impact of VSDA Parameters on Human Motion Performance
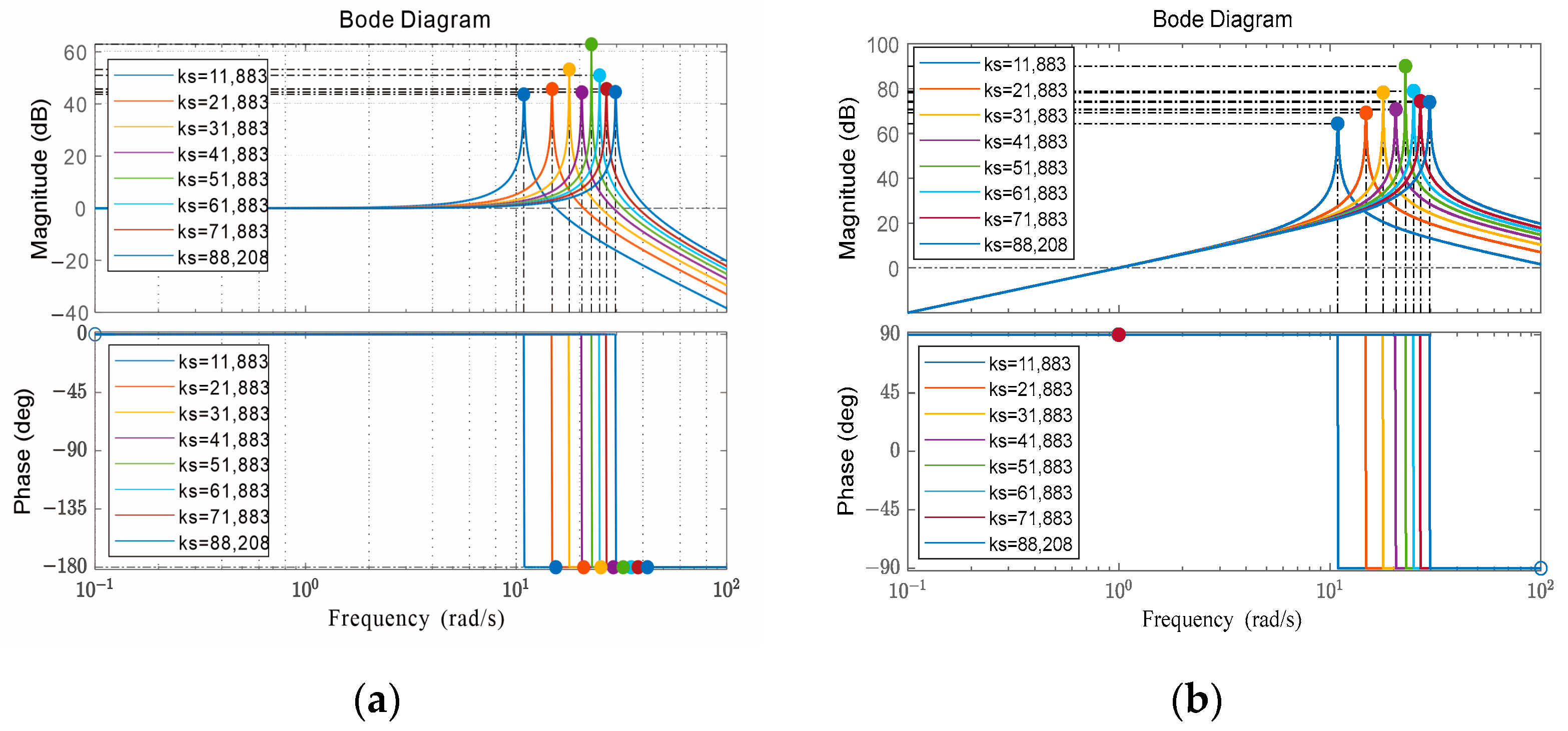
Through the structural analysis of the VSDA, we obtained its equivalent mathematical model. The overall stiffness range of the system is [
/
,
]. According to the selected spring parameters,
= 88,208 N/m and
= 13,733 N/m, thus indicating a stiffness range of [11,883~88,208 N/m]. With intervals of 10,000, we selected
ks values of 11,883 N/m, 21,883 N/m, 31,883 N/m, 41,883 N/m, 51,883 N/m, 61,883 N/m, 71,883 N/m, and 88,208 N/m, with
cs = 0 and
M = 100 kg. Using MATLAB/Simulink R2018a software, we analyzed the transfer functions of human displacement and acceleration to obtain Bode plots, as shown in
Figure 7.
From
Figure 7, it can be observed that the eight curves with different stiffness coefficients exhibit similar trends. At low frequencies, stiffness has minimal impact on the overall system, showing good magnitude and phase tracking characteristics, indicating system stability. A higher stiffness coefficient results in smaller displacement and acceleration of the human body. However, at higher frequencies, increasing the stiffness coefficient deteriorates the system stability, leading to larger displacement and acceleration of the human body. Therefore, to enhance the flexibility of human motion, the stiffness coefficient of the system cannot remain constant and needs to vary with the system frequency.
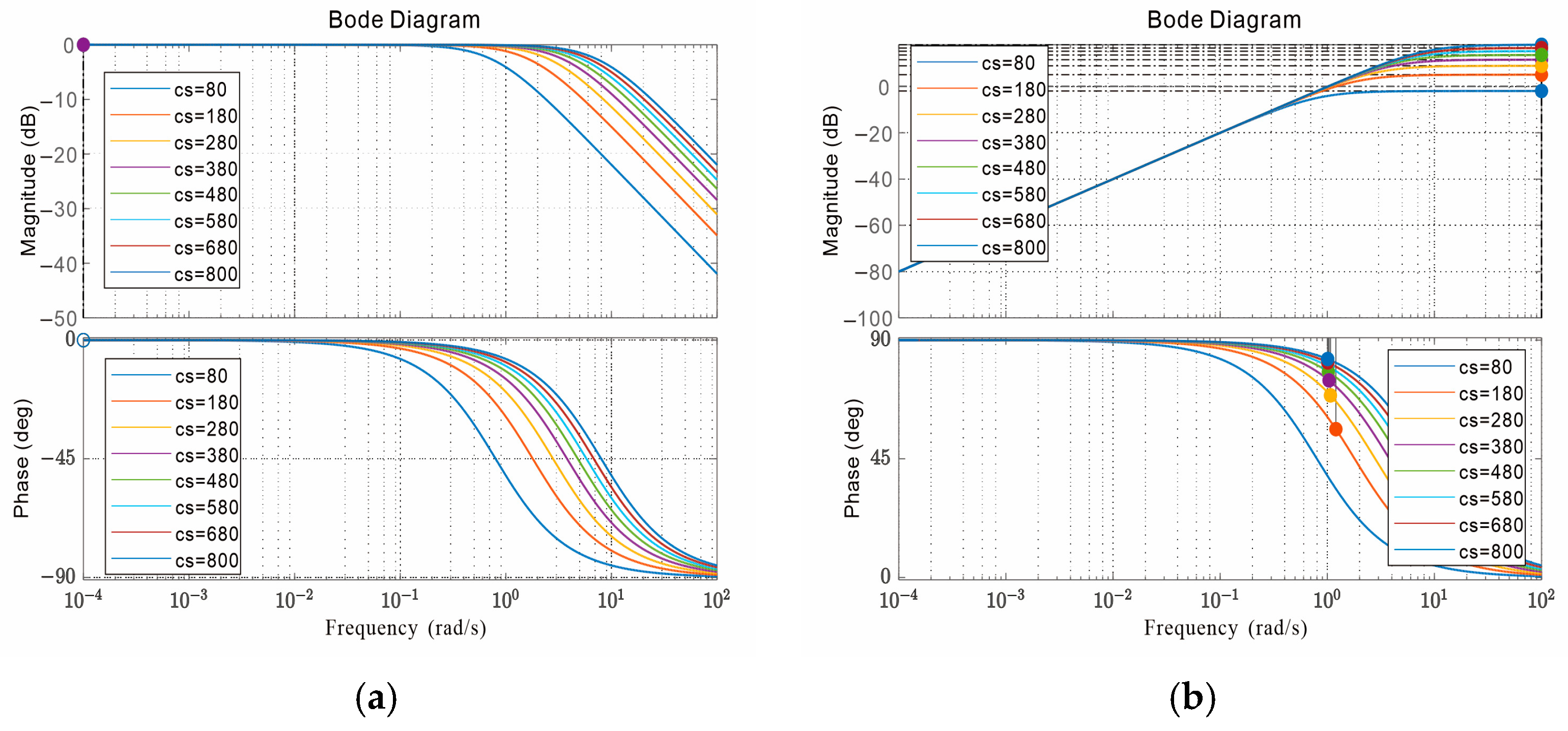
Similarly, based on the obtained equivalent mathematical model, the variation of the damping coefficient
c1 of the MRD-1 plays a decisive role in the entire system, and the system’s damping range corresponds to the variation of
c1. Combining the selected MRD-1, whose damping force
F varies from 80 to 800 N, and considering a human motion velocity
v = 1 m/s as an example, according to the damping coefficient calculation formula:
where
cs is the damping coefficient of the damper, and
v is the velocity of the human body.
Finally, the system’s damping range was determined to be [80~800 Ns/m]. We selected
cs values of 80 Ns/m, 180 Ns/m, 280 Ns/m, 380 Ns/m, 480 Ns/m, 580 Ns/m, 680 Ns/m, and 800 Ns/m, with
ks = 0 and
M = 100 kg. Using MATLAB/Simulink R2018a software, we analyzed the transfer functions of human displacement and acceleration to obtain Bode plots, as shown in
Figure 8.
From
Figure 8, it can be observed that the eight curves of different damping coefficients exhibit similar trends. At low frequencies, damping has little effect on the entire system, demonstrating good amplitude and phase characteristics. At high frequencies, as the damping coefficient increases, the system’s stability in terms of human displacement improves. Therefore, from the perspective of suppressing human displacement, it is advisable to increase the damping coefficient as much as possible. However, at high frequencies, with the increase in damping coefficient, human acceleration also increases. In such cases, it is necessary to reduce the damping coefficient.
The analysis above reveals that both stiffness and damping coefficients significantly impact human motion performance. Moreover, the required stiffness and damping coefficients vary at different frequencies. Therefore, a variable stiffness and damping structure are needed to achieve smooth motion. Both variable stiffness and variable damping are achieved through MRDs. Next, an analysis of the damping characteristics of MRDs is required.
3.4. The Damping Characteristics of MRDs
The MRD is a device that utilizes the rheological properties of magnetorheological fluid to adjust damping force. Its damping characteristics depend on the intensity of the magnetic field and the properties of the magnetorheological fluid, as well as the relationship between velocity and displacement [
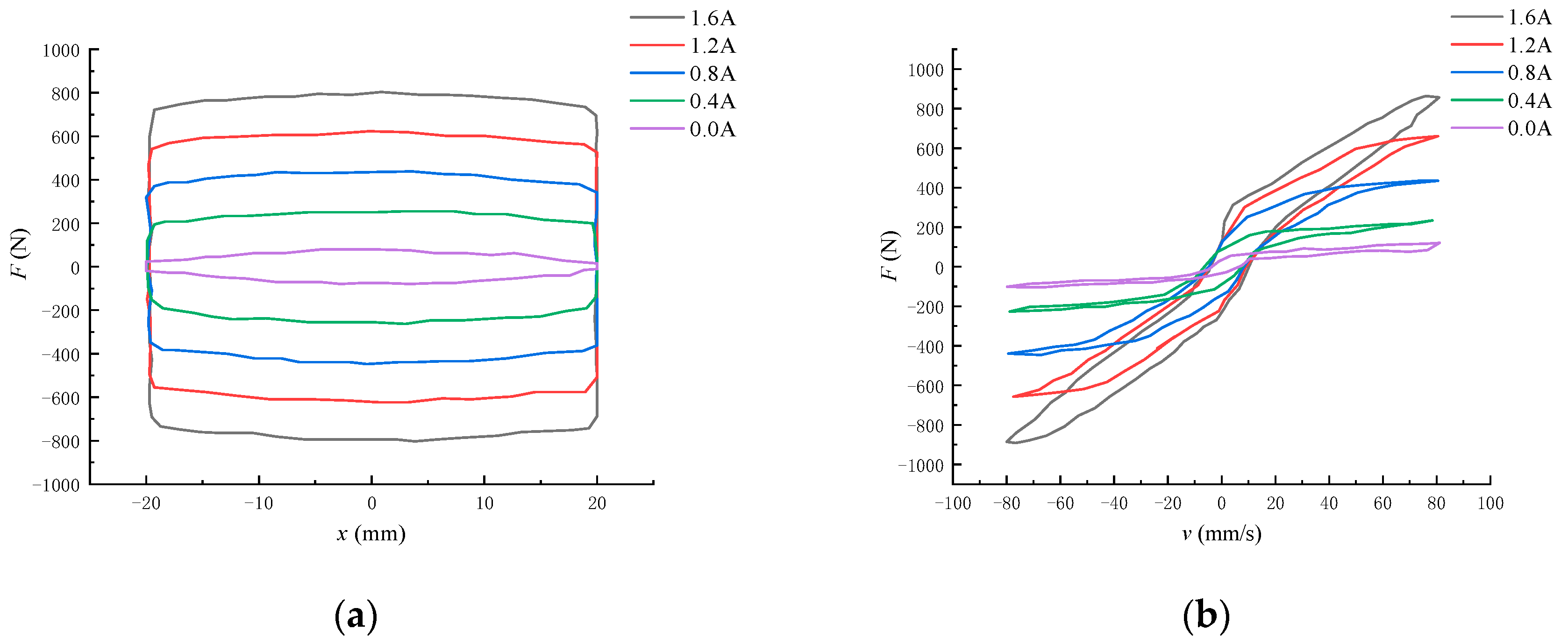
29]. The output damping mainly responds instantaneously to velocity, while displacement is the result of the long-term effect of velocity. Using a sinusoidal excitation input with an amplitude of 20 mm, frequency of 2 Hz, and velocity of 80 mm/s as an example, the
F–
x and
F–
v relationship curves of MRD-1 are shown in
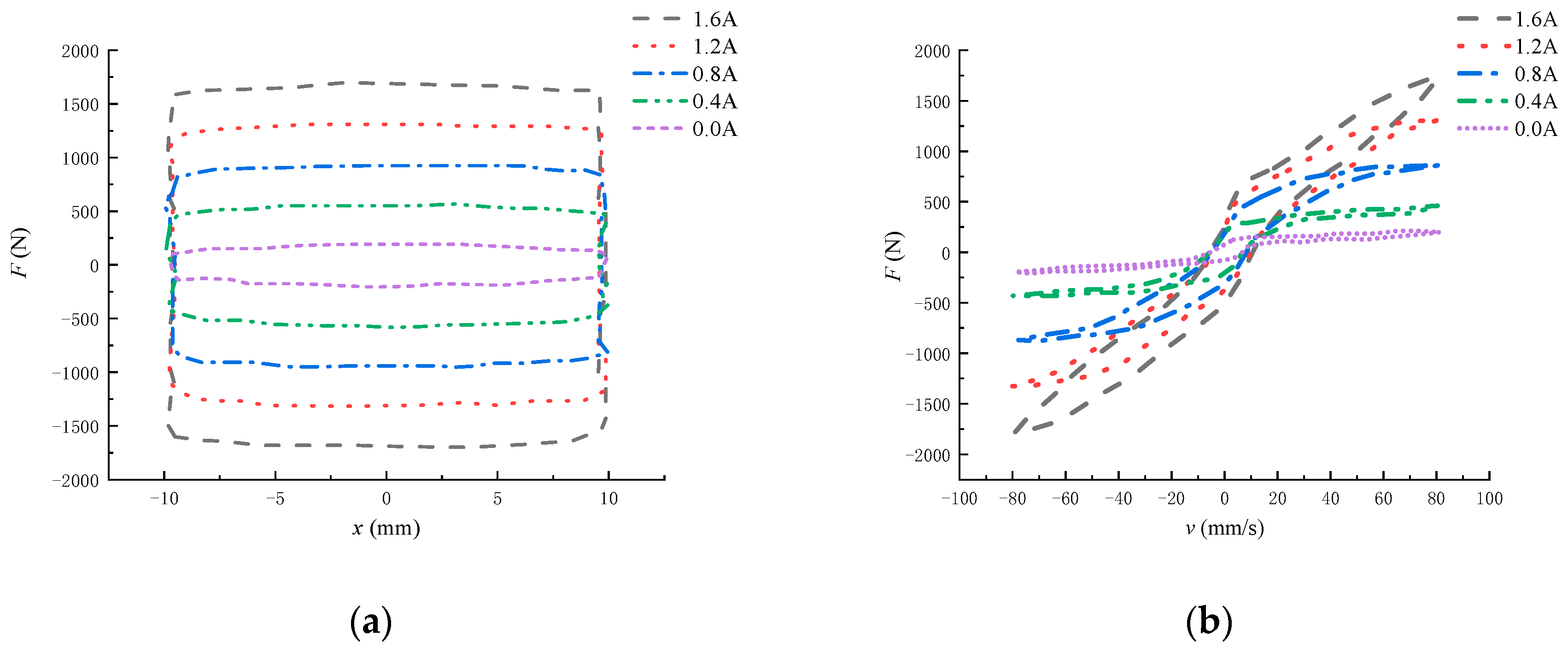
Figure 9 for input currents of 0.0, 0.4, 0.8, 1.2, and 1.6 A. Additionally, using a sinusoidal excitation input with an amplitude of 10 mm, frequency of 2 Hz, and velocity of 80 mm/s as an example, the
F–
x and
F–
v relationship curves of MRD-2 are shown in
Figure 10 for input currents of 0.0, 0.4, 0.8, 1.2, and 1.6 A.
From
Figure 9a and
Figure 10a, it can be observed that the
F–
x curve of the dampers exhibits nonlinear characteristics. When the displacement is constant, the damping force increases with the increase in input current. When the input current is constant, the damping force is greater at a displacement close to 0 mm compared to other displacements because the velocity is higher at this point, resulting in a larger damping force. Once the displacement reaches a certain value, the damping force approaches saturation and does not change significantly with further displacement changes.
From
Figure 9b and
Figure 10b, it can be observed that the
F–
v curve of the dampers also exhibits nonlinear characteristics, with significant hysteresis effects. As the current increases, the degree of hysteresis also increases. When the input current is constant, the damping force increases with the increase in velocity, and the damping force changes direction when the velocity changes direction, indicating that the damping force direction aligns with the velocity direction. When the input velocity is constant, the damping force increases with the increase in current. After the current reaches 1.6 A, the damping force approaches saturation and remains relatively stable without significant changes with further variations in the current.
During the process of assisting the wearer in completing a gait cycle, the lower limb exoskeleton rehabilitation robot experiences a certain impact force when the foot makes contact with the ground. This impact force is transmitted through the foot sole, ankle joint, knee joint, and hip joint to the main body of the robot and the wearer. Therefore, a buffer is needed to dissipate this impact force. Instead of the traditional rigid connecting components of the robot, the buffer replaces the biological human calf. During the process from foot contact to lift-off, the calf undergoes compression and recovery phases. During the compression phase, both the damper and the spring are compressed simultaneously. At this time, a portion of the impact force is absorbed by the damper, while the rest is stored as elastic potential energy by the spring. During the recovery phase, the spring plays the main role in releasing the elastic potential energy stored during the compression phase, allowing the calf to quickly return to its initial state to perform the next gait action. Therefore, both the damper and the spring play crucial roles throughout the entire process. If the damping force of the damper is too large, the compression stroke of the buffer will be small, resulting in rapid energy dissipation but slow recovery of the buffer, sometimes not even fully recovered before the next action begins. If the damping force of the damper is too small, the buffer’s compression stroke will be large. During the compression phase, the energy that the damper cannot dissipate will be stored by the spring, leading to incomplete dissipation of the spring’s elastic potential energy during the recovery phase, resulting in a phenomenon known as secondary bounce of the robot.
The MRD can adjust the viscosity of the magnetorheological fluid by controlling the intensity of the magnetic field through the magnitude of the current, thereby controlling the damping characteristics of the damper. In addition to this, an optimal control strategy is required to ensure that the buffer dissipates the impact energy completely throughout the entire buffering process, reduces the maximum acceleration load on the robot, and ensures that the robot’s foot does not experience secondary lift-off, achieving rapid recovery of the buffer and maintaining the stability of the robot’s motion.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}