Design and Parameter Optimization of a Dual-Disc Trenching Device for Ecological Tea Plantations

Abstract
:
1. Introduction
2. Materials and Methods
2.1. Structure and Operational Principles of the Colter
2.2. Motion Characteristics and Force Analysis
2.3. Discrete Element Method Simulation Experiments
2.3.1. Discrete Element Simulation Modeling
- (1)
- Trenching Device Model
- (2)
- Soil Discrete Element Model
2.3.2. Single-Factor Experiments
2.3.3. Multi-Factor Experiments
2.4. Field Verification
3. Results and Discussion
3.1. Simulation Analysis
3.2. Analysis of Single-Factor Experimental Results
- (1)
- The Influence of Relative Height on Performance Indicators
- (2)
- The Influence of Double-Disc Diameter on Performance Indicators
- (3)
- The Influence of Angle between Two Discs on Performance Indicators
3.3. Analysis of Multi-Factor Experiment Results
- (1)
- The Impact of Experimental Factors on Tillage Depth Stability Coefficient
- (2)
- The Impact of Factors on Working Resistance
3.4. Bench Validation Experiment Analysis
4. Conclusions
- (1)
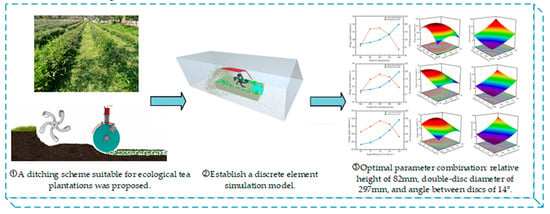
- Using EDEM software for the field operation simulation, the motion characteristics of the double-disc colter during trenching were analyzed. The tillage depth stability and working resistance were the key experimental indicators. Single-factor experiments, conducted with a forward speed of 0.5 m/s and a rotary tillage blade speed of 300 r/min, revealed significant impacts of the relative height, double-disc diameter, and angle between the two discs of the double-disc colter on both the tillage depth stability and working resistance. Optimal parameter ranges were determined to be relative heights of 80 mm to 120 mm, double-disc diameters of 280 mm to 320 mm, and angles between the two discs of 10° to 14°.
- (2)
- A quadratic polynomial model was established through multifactor experiments to correlate the tillage depth stability coefficient and working resistance with the three experimental factors. The optimization of the double-disc colter’s structural parameters yielded optimal operating performance, with a relative height of 82 mm, double-disc diameter of 297 mm, and angle between the two discs of 14°. This resulted in the tillage depth stability reaching 91.64%, with the working resistance reduced to 93.93 N.
- (3)
- The optimized double-disc colter underwent field validation tests, showing a mere 0.73% deviation between the simulated and field-tested tillage depth stability. The relative error between the simulated and field-tested working resistance was 10.93%, affirming the simulation model’s reliability. Additionally, the device meets the agronomic requirements of hilly eco-tea gardens, and our study offers valuable guidance for the design of trenching equipment for such environments.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, P.; Guo, W. Ptriple Value Implication and Practice Path of Strengthening the Confidence of Chinese Excellent Culture with Chinese Tea Culture. Trans. Chin. Soc. Tea. Commun. 2021, 48, 780–784. [Google Scholar]
- Zhang, X.; Yu, S.; Hu, X.; Zhang, L. Study on Rotary Tillage Cutting Simulations and Energy Consumption Predictions of Sandy Ground Soil in a Xinjiang Cotton Field. Comput. Electron. Agric. 2024, 217, 108646. [Google Scholar] [CrossRef]
- Hao, Z.H.; Zheng, E.L.; Li, X.; Yao, H.P.; Wang, X.C.; Qian, S.Y.; Li, W.X.; Zhu, M. Performance Analysis of the Soil-Contacting Parts for no-tillage Planters and Optimization of Blade Structure. Trans. Chin. Soc. Agric. Eng. 2023, 39, 1–13. [Google Scholar]
- Fang, H.M.; Ji, C.Y.; Zhang, Q.Y.; Guo, J. Force Analysis of Rotary Blade based on Distinct Element Method. Trans. Chin. Soc. Agric. Eng. 2016, 32, 54–59. [Google Scholar]
- Matin, M.A.; Fielke, J.M.; Desbiolles, J.M.A. Torque and Energy Characteristics for Strip-Tillage Cultivation when Cutting Furrows Using Three Designs of Rotary Blade. Biosyst. Eng. 2015, 129, 329–340. [Google Scholar] [CrossRef]
- Matin, M.A.; Hossain, M.I.; Gathala, M.K.; Timsina, J.; Krupnik, T.J. Optimal Design and Setting of Rotary Strip-Tiller Blades to Intensify Dry Season Cropping in Asian Wet Clay Soil Conditions. Soil. Tillage Res. 2021, 207, 104854. [Google Scholar] [CrossRef]
- Ahmadi, I.A. Torque Calculator for Rotary Tiller Using the Laws of Classical Mechanics. Soil. Tillage Res. 2017, 165, 137–143. [Google Scholar] [CrossRef]
- Ma, C.; Meng, H.W.; Zhang, J.; Zhang, C.; Zhao, Y.; Wang, L.H. Research and experiment on the trenching performance of orchard trenching device. Sci. Rep. 2023, 13, 18941. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; Zhang, Z.; Xiao, M.; Bartos, P.; Bohata, A. Soil-Cutting Simulation and Parameter Optimization of Rotary Blade’s Three-Axis Resistances by Response Surface Method. Comput. Electron. Agric. 2019, 164, 104902. [Google Scholar] [CrossRef]
- Yang, Y.W.; Tong, J.; Ma, Y.H.; Jiang, X.H.; Li, J.G. Design and Experiment of Biomimetic Rotary Tillage Blade based on Multiple Claws Characteristics of Mole Rats. Trans. Chin. Soc. Agric. Eng. 2019, 35, 37–45. [Google Scholar]
- Xiong, P.Y.; Yang, Z.; Sun, Z.Q.; Zhang, Q.Q.; Huang, Y.Q.; Zhang, Z.W. Simulation Analysis and Experiment for Three-Axis Working Resistances of Rotary Blade based on Discrete Element Method. Trans. Chin. Soc. Agric. Eng. 2018, 34, 113–121. [Google Scholar]
- Fiaz, A.; Ding, W.; Ding, Q.; Mubshar, H.; Khawar, J. Forces and Straw Cutting Performance of Double Disc Furrow Opener in No-Till Paddy Soil. PLoS ONE 2015, 10, e0119648. [Google Scholar]
- Collins, B.A.; Fowler, D.B. Effect of Soil Characteristics, Seeding Depth, Operating Speed, and Opener Design on Draft Force During Direct Seeding. Soil. Tillage Res. 1996, 39, 199–211. [Google Scholar] [CrossRef]
- Wang, Y.; Xue, W.; Ma, Y.; Tong, J.; Liu, X.; Sun, J. DEM and Soil Bin Study on a Biomimetic Disc Furrow Opener. Comput. Electron. Agric. 2019, 156, 209–216. [Google Scholar] [CrossRef]
- Zhu, R.X.; Li, C.X.; Cheng, Y.; Yan, X.L.; Li, J.; Shi, Y.P.; Ge, S.Q. Working Performance of Passive Disc Coulter. Trans. Chin. Soc. Agric. Eng. 2014, 30, 47–54. [Google Scholar]
- Zhang, S.Q.; Zuo, C.C.; Ma, C.L. The Study on the Model of Disc Coulter Force. Trans. Chin. Soc. Agric. Mach. 1998, S1, 71–75. [Google Scholar]
- Bai, X.H.; Li, J.; Lv, C.Y.; Hu, Y.Q. Analysis and Experiment on Working Performance of Disc Coulter for No-Tillage Seeder. Trans. Chin. Soc. Agric. Eng. 2014, 30, 1–9. [Google Scholar]
- Hu, H.; Li, H.; Wang, Q.; He, J.; Lu, C.; Wang, Y.; Liu, P. Anti-Blocking Performance of Ultrahigh-Pressure Waterjet Assisted Furrow Opener for No-Till Seeder. Int. J. Agr. Biol. Eng. 2020, 13, 64–70. [Google Scholar] [CrossRef]
- Jia, H.L.; Guo, M.Z.; Guo, C.J.; Zheng, J.; Zhang, C.L.; Zhao, J.L. Design of Dynamic Bionic Stubble Cutting Device and Optimization Test of Parameters. Trans. Chin. Soc. Agric. Mach. 2018, 49, 103–114. [Google Scholar]
- Lin, J.; Li, B.; Li, B.F.; Niu, J.L.; Qian, W. Parameter Optimization and Experiment on Archimedes Spiral Type of Gap Cutting Disc. Trans. Chin. Soc. Agric. Mach. 2014, 45, 118–124. [Google Scholar]
- Zhuang, J.; Jia, H.L.; Ma, Y.H.; Li, Y.; Di, Y.K. Design and Experiment of Sliding-Knife-Type Disc Opener. Trans. Chin. Soc. Agric. Mach. 2013, 44, 83–88. [Google Scholar]
- Ye, R.; Ma, X.; Zhao, J.; Liao, J.; Liu, X.; Xi, L.; Su, G. Optimization and Design of Disc-Type Furrow Opener of No-Till Seeder for Green Manure Crops in South Xinjiang Orchards. Agriculture 2023, 13, 1474. [Google Scholar] [CrossRef]
- Sugirbay, A.; Zhao, K.; Liu, G.; Hu, G.; Chen, J.; Mustafin, Z.; Iskakov, R.; Kakabayev, N.; Muratkhan, M.; Khan, V.; et al. Double Disc Colter for a Zero-Till Seeder Simultaneously Applying Granular Fertilizers and Wheat Seeds. Agriculture 2023, 13, 1102. [Google Scholar] [CrossRef]
- Francetto, T.R.; Alonço, A.D.S.; Brandelero, C.; Machado, O.D.D.C.; Veit, A.A.; Carpes, D.P. Disturbance of Ultisol Soil based on Iteractions between Frrow Oeners and Culters for the No-Tillage System. Span. J. Agric. Res. 2016, 14, e0208. [Google Scholar] [CrossRef]
- Karayel, D. Performance of a Modified Precision Vacuum Seeder for No-Till Sowing of Maize and Soybean. Soil. Tillage Res. 2009, 104, 121–125. [Google Scholar] [CrossRef]
- Wang, W.; Diao, P.; Jia, H.; Chen, Y. Design and Experiment Evaluation of Furrow Compaction Device with Opener for Maize. Int. J. Agr. Biol. Eng. 2020, 13, 123–131. [Google Scholar] [CrossRef]
- Villanueva, P.; Bona, S.; Lostado-Lorza, R.; Veiga, F. Morphological Design of a Bicycle Propulsion Component Using the Hierarchical Analysis Process (AHP). Appl. Sci. 2023, 13, 7792. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Key Component | Material | Density (kg·m−3) | Poisson’s Ratio | Shear Modulus (Pa) |
|---|---|---|---|---|
| Soil deflector plate | 1566 steel | 7850 | 0.35 | 7.8 × 1010 |
| Rotary tiller | ||||
| Double-disc trencher |
| Parameter | Value |
|---|---|
| Soil density/kg·m−3 | 2600 |
| Soil Poisson’s ratio | 0.42 |
| Soil shear modulus/Pa | 1 × 106 |
| Straw density/kg·m−3 | 494 |
| Straw Poisson’s ratio | 0.4 |
| Straw shear modulus/Pa | 1 × 106 |
| Soil–soil restitution coefficient | 0.35 |
| Soil–soil static friction coefficient | 0.55 |
| Soil–soil rolling friction coefficient | 0.37 |
| Soil–steel restitution coefficient | 0.6 |
| Soil–steel static friction coefficient | 0.5 |
| Soil–steel rolling friction coefficient | 0.3 |
| Straw–steel restitution coefficient | 0.5 |
| Straw–steel static friction coefficient | 0.25 |
| Straw–steel rolling friction coefficient | 0.06 |
| Experimental Factors | |||
|---|---|---|---|
| Level Code | Relative Height /(mm) | Double-Disc Diameter /(mm) | Angle between Two Discs /(°) |
| 1 | 60 | 260 | 10 |
| 2 | 80 | 280 | 12 |
| 3 | 100 | 300 | 14 |
| 4 | 120 | 320 | 16 |
| 5 | 140 | 340 | 18 |
| Experimental Factors | |||
|---|---|---|---|
| Level Code | Relative Height /(mm) | Double-Disc Diameter /(mm) | Angle between Two Disks /(°) |
| 1.682 | 134 | 334 | 15 |
| 1 | 120 | 320 | 14 |
| 0 | 100 | 300 | 12 |
| −1 | 80 | 280 | 10 |
| −1.682 | 66 | 266 | 9 |
| Run | Experimental Factors | Performance Indicators | |||
|---|---|---|---|---|---|
| Relative Height /(mm) | Double-Disc Diameter /(mm) | Angle between Two Disks /(°) | Tillage Depth Stability /(%) | Working Resistance /(N) | |
| 1 | −1.682 | 0 | 0 | 87.06 | 73.5 |
| 2 | 0 | −1.682 | 0 | 84.29 | 92.1 |
| 3 | 0 | 0 | 0 | 91.01 | 98.8 |
| 4 | 1 | −1 | −1 | 86.43 | 127.6 |
| 5 | 0 | 0 | 0 | 90.85 | 105.7 |
| 6 | −1 | −1 | 1 | 90.06 | 85.7 |
| 7 | 1.682 | 0 | 0 | 86.32 | 179.2 |
| 8 | 0 | 0 | 0 | 89.63 | 110.5 |
| 9 | 0 | 0 | 0 | 90.36 | 104.6 |
| 10 | 0 | 0 | 0 | 88.97 | 108.9 |
| 11 | −1 | 1 | −1 | 87.56 | 107 |
| 12 | 0 | 0 | −1.682 | 86.93 | 94.4 |
| 13 | 0 | 0 | 1.682 | 92.6 | 136.6 |
| 14 | 1 | 1 | −1 | 86.14 | 168.2 |
| 15 | 0 | 1.682 | 0 | 86.16 | 165.6 |
| 16 | −1 | −1 | −1 | 85.26 | 81.5 |
| 17 | 0 | 0 | 0 | 90.21 | 105.9 |
| 18 | 1 | 1 | 1 | 89.36 | 221.6 |
| 19 | 1 | −1 | 1 | 88.74 | 140.9 |
| 20 | −1 | 1 | 1 | 91.28 | 129.2 |
| Source | Square Sum | Degree of Freedom | Mean Square | F-Value | p-Value | Significance |
|---|---|---|---|---|---|---|
| Regression Model | 93.99 | 9 | 10.44 | 14.54 | 0.0001 | ** |
| X1 | 1.64 | 1 | 1.64 | 2.29 | 0.1615 | |
| X2 | 3.58 | 1 | 3.58 | 4.99 | 0.0495 | * |
| X3 | 40.73 | 1 | 40.73 | 56.72 | <0.0001 | ** |
| X1X2 | 1.27 | 1 | 1.27 | 1.77 | 0.2128 | |
| X1X3 | 1.12 | 1 | 1.12 | 1.56 | 0.2407 | |
| X2X3 | 0.0036 | 1 | 0.0036 | 0.005 | 0.9449 | |
| X12 | 14.65 | 1 | 14.56 | 20.4 | 0.0011 | ** |
| X22 | 33.56 | 1 | 33.56 | 46.74 | <0.0001 | ** |
| X32 | 0.09 | 1 | 0.09 | 0.1253 | 0.7308 | |
| Residual | 7.18 | 10 | 0.7182 | |||
| Lack of Fit | 4.24 | 5 | 0.8489 | 1.45 | 0.348 | |
| Error | 2.94 | 5 | 0.5875 | |||
| Sum | 101.17 | 19 |
| Source | Square Sum | Degree of Freedom | Mean Square | F-Value | p-Value | Significance |
|---|---|---|---|---|---|---|
| Regression Model | 26374.72 | 9 | 2930.52 | 79.93 | <0.0001 | ** |
| X1 | 13707.36 | 1 | 13707.36 | 373.85 | <0.0001 | ** |
| X2 | 7215.47 | 1 | 7215.47 | 196.79 | <0.0001 | ** |
| X3 | 1971.14 | 1 | 1971.14 | 53.76 | <0.0001 | ** |
| X1X2 | 341.91 | 1 | 341.91 | 9.33 | 0.0122 | * |
| X1X3 | 203.01 | 1 | 203.01 | 5.54 | 0.0404 | * |
| X2X3 | 421.95 | 1 | 421.95 | 11.51 | 0.0069 | ** |
| X12 | 1164.93 | 1 | 1164.93 | 31.77 | 0.0002 | ** |
| X22 | 1405.24 | 1 | 1405.24 | 38.33 | 0.0001 | ** |
| X32 | 382.93 | 1 | 382.93 | 10.44 | 0.009 | ** |
| Residual | 366.66 | 10 | 36.67 | |||
| Lack of Fit | 284.53 | 5 | 56.91 | 3.46 | 0.0994 | |
| Error | 82.13 | 5 | 16.43 | |||
| Sum | 26741.38 | 19 |
| Parameter | Tillage Depth Stability (%) | Working Resistance (N) |
|---|---|---|
| Simulation Testing Value | 91.64 | 93.93 |
| Field Testing Value | 92.37 | 104.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Ren, J.; Huang, W.; Chen, L.; Weng, W.; Chen, C.; Zheng, S. Design and Parameter Optimization of a Dual-Disc Trenching Device for Ecological Tea Plantations. Agriculture 2024, 14, 704. https://doi.org/10.3390/agriculture14050704
Chen W, Ren J, Huang W, Chen L, Weng W, Chen C, Zheng S. Design and Parameter Optimization of a Dual-Disc Trenching Device for Ecological Tea Plantations. Agriculture. 2024; 14(5):704. https://doi.org/10.3390/agriculture14050704
Chicago/Turabian StyleChen, Weixiang, Jinbo Ren, Weiliang Huang, Longbin Chen, Wuxiong Weng, Chongcheng Chen, and Shuhe Zheng. 2024. "Design and Parameter Optimization of a Dual-Disc Trenching Device for Ecological Tea Plantations" Agriculture 14, no. 5: 704. https://doi.org/10.3390/agriculture14050704