
UAV Ad Hoc Network Routing Algorithms in Space–Air–Ground Integrated Networks: Challenges and Directions

 ,
,  ,
,
Abstract
:1. Introduction
- High dynamics: The stability of the routing path is greatly affected by the rapid speed of the drone’s movement through the air [10].
- High loss of connection rate: Due to the flight height, terrain, and weather of the UAV, there will be situations where the UAV loses connection with ground nodes or other UAVs [11].
- Low bandwidth and high latency: Due to the long communication distance between UAVs, the communication signal is affected by factors such as atmosphere and terrain. The communication bandwidth is low, and the communication latency is high [12].
- In this paper, we review 48 relevant articles, which were published in the past five years and represent the latest research advancements in routing algorithms. We conduct an in-depth analysis of the limitations of these routing algorithms.
- We categorize existing routing algorithms into eight major classes and discuss the optimization directions for each class. Additionally, we provide insights into the research directions for FANET routing algorithms in the context of future SAGINs.
- To provide foundational experimental ideas for future researchers, we summarize the existing research’s experimental methodologies from multiple aspects, including network scale, UAV types, and simulation platforms. Moreover, we present the trends and shortcomings of the experimental designs in the form of statistical charts to provide a visual analysis of experimental methodologies.
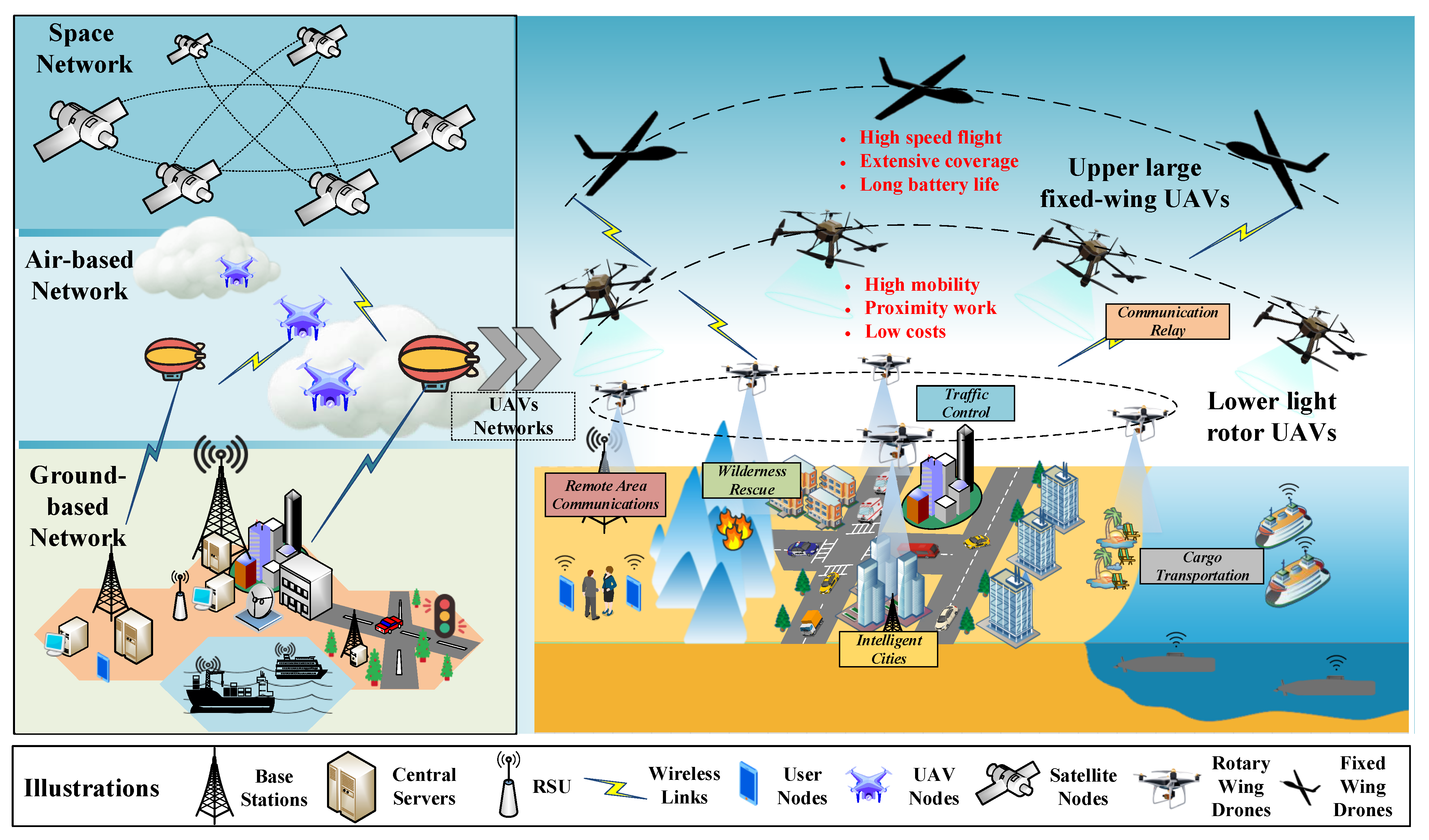
2. FANET Architecture and Routing Protocol
2.1. Communication and Application Architecture
2.2. Routing Protocols
2.2.1. Topology-Based
2.2.2. Security-Based
2.2.3. Swarm-Based
2.2.4. Hierarchical-Based
2.2.5. Energy-Based
2.2.6. Heterogeneous-Based
2.2.7. Position-Based
2.2.8. DTN-Based
3. FANET Routing Algorithms
3.1. Exact-Based Routing Algorithms
3.2. Heuristic-Based Routing Algorithms
3.3. Reinforcement-Learning-Based Routing Algorithms
4. Analysis and Perspectives
4.1. Analysis of Experiments
4.2. Analysis of Other Issues
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jiang, C.; Ge, N.; Kuang, L. AI-Enabled Next-Generation Communication Networks: Intelligent Agent and AI Router. IEEE Wirel. Commun. 2020, 27, 129–133. [Google Scholar] [CrossRef]
- Gu, S.; Zhang, Q.; Xiang, W. Coded Storage-and-Computation: A New Paradigm to Enhancing Intelligent Services in Space-Air-Ground Integrated Networks. IEEE Wirel. Commun. 2020, 27, 44–51. [Google Scholar] [CrossRef]
- Shumeye Lakew, D.; Sa’ad, U.; Dao, N.N.; Na, W.; Cho, S. Routing in Flying Ad Hoc Networks: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2020, 22, 1071–1120. [Google Scholar] [CrossRef]
- Rovira-Sugranes, A.; Razi, A.; Afghah, F.; Chakareski, J. A review of AI-enabled routing protocols for UAV networks: Trends, challenges, and future outlook. Ad Hoc Netw. 2022, 130, 102790. [Google Scholar] [CrossRef]
- Kim, S.; Kwak, J.H.; Oh, B.; Lee, D.H.; Lee, D. An Optimal Routing Algorithm for Unmanned Aerial Vehicles. Sensors 2021, 21, 1219. [Google Scholar] [CrossRef] [PubMed]
- Gu, X.; Zhang, G. A survey on UAV-assisted wireless communications: Recent advances and future trends. Comput. Commun. 2023, 208, 44–78. [Google Scholar] [CrossRef]
- Liu, Q.; Liang, H.; Luo, R.; Liu, Q. Energy-Efficiency Computation Offloading Strategy in UAV Aided V2X Network With Integrated Sensing and Communication. IEEE Open J. Commun. Soc. 2022, 3, 1337–1346. [Google Scholar] [CrossRef]
- Gong, Y.; Yao, H.; Wang, J.; Li, M.; Guo, S. Edge Intelligence-driven Joint Offloading and Resource Allocation for Future 6G Industrial Internet of Things. IEEE Trans. Netw. Sci. Eng. 2022. [Google Scholar] [CrossRef]
- Feng, Z.; Wei, Z.; Chen, X.; Yang, H.; Zhang, Q.; Zhang, P. Joint Communication, Sensing, and Computation Enabled 6G Intelligent Machine System. IEEE Netw. 2021, 35, 34–42. [Google Scholar] [CrossRef]
- Usman, Q.; Chughtai, O.; Nawaz, N.; Kaleem, Z.; Khaliq, K.A.; Nguyen, L.D. Lifetime Improvement Through Suitable Next Hop Nodes Using Forwarding Angle in FANET. In Proceedings of the 2020 4th International Conference on Recent Advances in Signal Processing, Telecommunications & Computing (SigTelCom), Hanoi, Vietnam, 28–29 August 2020; pp. 50–55. [Google Scholar] [CrossRef]
- Sekander, S.; Tabassum, H.; Hossain, E. Multi-Tier Drone Architecture for 5G/B5G Cellular Networks: Challenges, Trends, and Prospects. IEEE Commun. Mag. 2018, 56, 96–103. [Google Scholar] [CrossRef] [Green Version]
- Sun, F.; Deng, Z.; Wang, C.; Li, Z. A Networking Scheme for FANET Basing on SPMA Protocol. In Proceedings of the 2020 IEEE 6th International Conference on Computer and Communications (ICCC), Chengdu, China, 11–14 December 2020; pp. 182–187. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Mozaffari, M.; Chaib, N.; Lorenz, P.; Atiquzzaman, M.; Jamalipour, A. ECaD: Energy-efficient routing in flying ad hoc networks. Int. J. Commun. Syst. 2019, 32, e4156. [Google Scholar] [CrossRef] [Green Version]
- Raja, G.; Anbalagan, S.; Ganapathisubramaniyan, A.; Selvakumar, M.S.; Bashir, A.K.; Mumtaz, S. Efficient and Secured Swarm Pattern Multi-UAV Communication. IEEE Trans. Veh. Technol. 2021, 70, 7050–7058. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Bocewicz, G.; Nielsen, P.; Banaszak, Z. Unmanned Aerial Vehicle Routing Problems: A Literature Review. Appl. Sci. 2020, 10, 4504. [Google Scholar] [CrossRef]
- Sharma, B.; Obaidat, M.S.; Sharma, V.; Hsiao, K.F. Routing and collision avoidance techniques for unmanned aerial vehicles: Analysis, optimal solutions, and future directions. Int. J. Commun. Syst. 2020, 33, e4628. [Google Scholar] [CrossRef]
- Haider, S.K.; Nauman, A.; Jamshed, M.A.; Jiang, A.; Batool, S.; Kim, S.W. Internet of Drones: Routing Algorithms, Techniques and Challenges. Mathematics 2022, 10, 1488. [Google Scholar] [CrossRef]
- Nawaz, H.; Ali, H.M.; Laghari, A.A. UAV communication networks issues: A review. Arch. Comput. Methods Eng. 2021, 28, 1349–1369. [Google Scholar] [CrossRef]
- Chen, X.; Tang, J.; Lao, S. Review of Unmanned Aerial Vehicle Swarm Communication Architectures and Routing Protocols. Appl. Sci. 2020, 10, 3661. [Google Scholar] [CrossRef]
- Zhang, Q.; Jiang, M.; Feng, Z.; Li, W.; Zhang, W.; Pan, M. IoT Enabled UAV: Network Architecture and Routing Algorithm. IEEE Internet Things J. 2019, 6, 3727–3742. [Google Scholar] [CrossRef]
- Zhang, P.; Gan, P.; Aujla, G.S.; Batth, R.S. Reinforcement Learning for Edge Device Selection Using Social Attribute Perception in Industry 4.0. IEEE Internet Things J. 2023, 10, 2784–2792. [Google Scholar] [CrossRef]
- Zhang, P.; Gan, P.; Kumar, N.; Hsu, C.H.; Shen, S.; Li, S. RKD-VNE: Virtual network embedding algorithm assisted by resource knowledge description and deep reinforcement learning in IIoT scenario. Future Gener. Comput. Syst. 2022, 135, 426–437. [Google Scholar] [CrossRef]
- Kato, N.; Fadlullah, Z.M.; Tang, F.; Mao, B.; Tani, S.; Okamura, A.; Liu, J. Optimizing Space-Air-Ground Integrated Networks by Artificial Intelligence. IEEE Wirel. Commun. 2019, 26, 140–147. [Google Scholar] [CrossRef] [Green Version]
- Alam, M.M.; Moh, S. Survey on Q-Learning-Based Position-Aware Routing Protocols in Flying Ad Hoc Networks. Electronics 2022, 11, 1099. [Google Scholar] [CrossRef]
- Nayyar, A. Flying Adhoc Network (FANETs): Simulation Based Performance Comparison of Routing Protocols: AODV, DSDV, DSR, OLSR, AOMDV and HWMP. In Proceedings of the 2018 International Conference on Advances in Big Data, Computing and Data Communication Systems (icABCD), Durban, South Africa, 6–7 August 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Wang, Z.; Duan, L. Chase or Wait: Dynamic UAV Deployment to Learn and Catch Time-Varying User Activities. IEEE Trans. Mob. Comput. 2023, 22, 1369–1383. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Kak, A. The Internet of Space Things/CubeSats. IEEE Netw. 2019, 33, 212–218. [Google Scholar] [CrossRef]
- Kak, A.; Akyildiz, I.F. Designing Large-Scale Constellations for the Internet of Space Things With CubeSats. IEEE Internet Things J. 2021, 8, 1749–1768. [Google Scholar] [CrossRef]
- Jan, S.U.; Qayum, F.; Khan, H.U. Design and Analysis of Lightweight Authentication Protocol for Securing IoD. IEEE Access 2021, 9, 69287–69306. [Google Scholar] [CrossRef]
- Hu, Y.C.; Maltz, D.A.; Johnson, D.B. The Dynamic Source Routing Protocol (DSR) for Mobile Ad Hoc Networks for IPv4. 2007. Available online: https://www.rfc-editor.org/info/rfc4728 (accessed on 1 February 2007).
- Khan, I.; Hassan, M.; Fayaz, M.; Aziz, M. Improved sequencing heuristic DSDV protocol using nomadic mobility model for FANETS. Comput. Mater. Contin. 2021, 70, 3654–3665. [Google Scholar] [CrossRef]
- Zhang, Y.; Qian, L.; Xue, X.; Wang, W. An Improved DSDV Protocol based on Link Stability with Adaptive Period for Intra-cluster Routing in High-dynamic Flying UAV Networks. In Proceedings of the 2022 International Applied Computational Electromagnetics Society Symposium (ACES-China), Xuzhou, China, 9–12 December 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Kaur, P.; Singh, A.; Gill, S.S. RGIM: An Integrated Approach to Improve QoS in AODV, DSR and DSDV Routing Protocols for FANETS Using the Chain Mobility Model. Comput. J. 2020, 63, 1500–1512. [Google Scholar] [CrossRef]
- Maxa, J.A.; Ben Mahmoud, M.S.; Larrieu, N. Performance evaluation of a new secure routing protocol for UAV Ad hoc Network. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Maxa, J.A.; Ben Mahmoud, M.S.; Larrieu, N. Secure routing protocol design for UAV Ad hoc NETworks. In Proceedings of the 2015 IEEE/AIAA 34th Digital Avionics Systems Conference (DASC), Prague, Czech Republic, 13–17 September 2015; pp. 4A5-1–4A-15. [Google Scholar] [CrossRef] [Green Version]
- Sbeiti, M.; Goddemeier, N.; Behnke, D.; Wietfeld, C. PASER: Secure and Efficient Routing Approach for Airborne Mesh Networks. IEEE Trans. Wirel. Commun. 2016, 15, 1950–1964. [Google Scholar] [CrossRef]
- Agron, D.J.S.; Ramli, M.R.; Lee, J.M.; Kim, D.S. Secure Ground Control Station-based Routing Protocol for UAV Networks. In Proceedings of the 2019 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 16–18 October 2019; pp. 794–798. [Google Scholar] [CrossRef]
- Fatemidokht, H.; Rafsanjani, M.K.; Gupta, B.B.; Hsu, C.H. Efficient and Secure Routing Protocol Based on Artificial Intelligence Algorithms With UAV-Assisted for Vehicular Ad Hoc Networks in Intelligent Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4757–4769. [Google Scholar] [CrossRef]
- Marcelo Gomes Pereira de Lacerda, L.F.d.A.P. A systematic literature review on general parameter control for evolutionary and swarm-based algorithms. Swarm Evol. Comput. 2021, 60, 100777. [Google Scholar] [CrossRef]
- Zheng, X.; Qi, Q.; Wang, Q.; Li, Y. A Stable Ant-based Routing Protocol for Flying Ad Hoc Networks. In Proceedings of the 2017 4th International Conference on Machinery, Materials and Computer (MACMC 2017), Xi’an, China, 27–29 November 2017; Atlantis Press: Dordrecht, The Netherlands, 2018; pp. 410–416. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Ru, L.; Chi, W.; Liu, Y.; Yu, Q.; Fang, K. Ant colony optimization based polymorphism-aware routing algorithm for ad hoc UAV network. Multimed. Tools Appl. 2016, 75, 14451–14476. [Google Scholar] [CrossRef]
- Leonov, A.V. Application of bee colony algorithm for FANET routing. In Proceedings of the 2016 17th International Conference of Young Specialists on Micro/Nanotechnologies and Electron Devices (EDM), Erlagol, Russia, 30 June–4 July 2016; pp. 124–132. [Google Scholar] [CrossRef]
- Wei, J.; Chen, Y.; Yu, Y.; Chen, Y. Optimal Randomness in Swarm-Based Search. Mathematics 2019, 7, 828. [Google Scholar] [CrossRef] [Green Version]
- Verma, P.; Shaw, S.; Mohanty, K.; Richa, P.; Sah, R.; Mukherjee, A. A Survey on Hierarchical Based Routing Protocols for Wireless Sensor Network. In Proceedings of the 2018 International Conference on Communication, Computing and Internet of Things (IC3IoT), Chennai, India, 15–17 February 2018; pp. 338–341. [Google Scholar] [CrossRef]
- Bhatia, T.K.; Tyagi, S.; Gusain, A.; Sharma, K. A Study on the Flying Ad-hoc Networks: Related Challenges, Routing Protocols and Mobility Models. In Proceedings of the 2022 11th International Conference on System Modeling & Advancement in Research Trends (SMART), Moradabad, India, 16–17 December 2022; pp. 438–444. [Google Scholar] [CrossRef]
- Zang, C.; Zang, S. Mobility prediction clustering algorithm for UAV networking. In Proceedings of the 2011 IEEE GLOBECOM Workshops (GC Wkshps), Houston, TX, USA, 5–9 December 2011; pp. 1158–1161. [Google Scholar] [CrossRef]
- Zhao, Z.; Cumino, P.; Souza, A.; Rosário, D.; Braun, T.; Cerqueira, E.; Gerla, M. Software-defined unmanned aerial vehicles networking for video dissemination services. Ad Hoc Netw. 2019, 83, 68–77. [Google Scholar] [CrossRef]
- Cumino, P.; Maciel, K.; Tavares, T.; Oliveira, H.; Rosário, D.; Cerqueira, E. Cluster-Based Control Plane Messages Management in Software-Defined Flying Ad-Hoc Network. Sensors 2020, 20, 67. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Liu, H.; Chen, Y.; Zhu, X.; Ning, Y.; Zhu, W. UEE-RPL: A UAV-Based Energy Efficient Routing for Internet of Things. IEEE Trans. Green Commun. Netw. 2021, 5, 1333–1344. [Google Scholar] [CrossRef]
- Baek, J.; Han, S.I.; Han, Y. Energy-Efficient UAV Routing for Wireless Sensor Networks. IEEE Trans. Veh. Technol. 2020, 69, 1741–1750. [Google Scholar] [CrossRef]
- Mukherjee, A.; Misra, S.; Chandra, V.S.P.; Raghuwanshi, N.S. ECoR: Energy-Aware Collaborative Routing for Task Offload in Sustainable UAV Swarms. IEEE Trans. Sustain. Comput. 2020, 5, 514–525. [Google Scholar] [CrossRef]
- Khelifi, F.; Bradai, A.; Singh, K.; Atri, M. Localization and Energy-Efficient Data Routing for Unmanned Aerial Vehicles: Fuzzy-Logic-Based Approach. IEEE Commun. Mag. 2018, 56, 129–133. [Google Scholar] [CrossRef]
- Tang, Y.; Cheng, N.; Wu, W.; Wang, M.; Dai, Y.; Shen, X. Delay-Minimization Routing for Heterogeneous VANETs With Machine Learning Based Mobility Prediction. IEEE Trans. Veh. Technol. 2019, 68, 3967–3979. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Lakas, A.; Lagraa, N.; Yagoubi, M.B. UVAR: An intersection UAV-assisted VANET routing protocol. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Lakas, A.; Zhou, F.; Güneş, M.; Lagraa, N.; Yagoubi, M.B. Intelligent UAV-assisted routing protocol for urban VANETs. Comput. Commun. 2017, 107, 93–111. [Google Scholar] [CrossRef]
- Sharma, V.; Kumar, R.; Kumar, N. DPTR: Distributed priority tree-based routing protocol for FANETs. Comput. Commun. 2018, 122, 129–151. [Google Scholar] [CrossRef]
- Shirani, R.; St-Hilaire, M.; Kunz, T.; Zhou, Y.; Li, J.; Lamont, L. Combined Reactive-Geographic routing for Unmanned Aeronautical Ad-hoc Networks. In Proceedings of the 2012 8th International Wireless Communications and Mobile Computing Conference (IWCMC), Limassol, Cyprus, 27–31 August 2012; pp. 820–826. [Google Scholar] [CrossRef]
- Karp, B.; Kung, H.T. GPSR: Greedy Perimeter Stateless Routing for Wireless Networks; Association for Computing Machinery: New York, NY, USA, 2000; pp. 243–254. [Google Scholar] [CrossRef]
- Kim, B.S.; Kim, K.I.; Roh, B.; Choi, H. A new routing protocol for UAV relayed tactical mobile ad hoc networks. In Proceedings of the 2018 Wireless Telecommunications Symposium (WTS), Phoenix, AZ, USA, 17–20 April 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Silva, A.; Reza, N.; Oliveira, A. Improvement and Performance Evaluation of GPSR-Based Routing Techniques for Vehicular Ad Hoc Networks. IEEE Access 2019, 7, 21722–21733. [Google Scholar] [CrossRef]
- Yang, X.; Li, M.; Qian, Z.; Di, T. Improvement of GPSR Protocol in Vehicular Ad Hoc Network. IEEE Access 2018, 6, 39515–39524. [Google Scholar] [CrossRef]
- Li, X.; Huang, J. ABPP: An Adaptive Beacon Scheme for Geographic Routing in FANET. In Proceedings of the 2017 18th International Conference on Parallel and Distributed Computing, Applications and Technologies (PDCAT), Taipei, Taiwan, 18–20 December 2017; pp. 293–299. [Google Scholar] [CrossRef]
- Yin, C.; Xiao, Z.; Cao, X.; Xi, X.; Yang, P.; Wu, D. Enhanced routing protocol for fast flying UAV network. In Proceedings of the 2016 IEEE International Conference on Communication Systems (ICCS), Shenzhen, China, 14–16 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Li, X.; Ci, L.; Cheng, B.; Tian, C.; Yang, M. Ant Colony Based Routing Strategy in UAV Delay Tolerant Networks. In Advances in Wireless Sensor Networks, Proceedings of the 6th China Conference, CWSN 2012, Huangshan, China, 25–27 October 2012; Springer: Berlin/Heidelberg, Germany, 2013; pp. 191–203. [Google Scholar] [CrossRef]
- Gupta, R.; Krishnamurthi, N.; Wang, U.T.; Tamminedi, T.; Gerla, M. Routing in Mobile Ad-Hoc Networks Using Social Tie Strengths and Mobility Plans. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutor. 2016, 18, 1123–1152. [Google Scholar] [CrossRef] [Green Version]
- Savkin, A.V.; Huang, H. Navigation of a UAV Network for Optimal Surveillance of a Group of Ground Targets Moving Along a Road. IEEE Trans. Intell. Transp. Syst. 2022, 23, 9281–9285. [Google Scholar] [CrossRef]
- Yanmaz, E.; Yahyanejad, S.; Rinner, B.; Hellwagner, H.; Bettstetter, C. Drone networks: Communications, coordination, and sensing. Ad Hoc Netw. 2018, 68, 1–15. [Google Scholar] [CrossRef]
- Basu, D.; Kal, S.; Ghosh, U.; Datta, R. SoftDrone: Softwarized 5G assisted drone networks for dynamic resource sharing using machine learning techniques. Comput. Electr. Eng. 2022, 101, 107962. [Google Scholar] [CrossRef]
- Alharthi, M.; Taha, A.E.M.; Hassanein, H.S. An Architecture for Software Defined Drone Networks. In Proceedings of the ICC 2019—2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Punnen, A.P.; Sotirov, R. Mathematical Programming Models and Exact Algorithms. In The Quadratic Unconstrained Binary Optimization Problem: Theory, Algorithms, and Applications; Springer International Publishing: Berlin/Heidelberg, Germany, 2022; pp. 139–185. [Google Scholar] [CrossRef]
- Zhou, H.; Qin, H.; Cheng, C.; Rousseau, L.M. An exact algorithm for the two-echelon vehicle routing problem with drones. Transp. Res. Part B Methodol. 2023, 168, 124–150. [Google Scholar] [CrossRef]
- Manyam, S.G.; Sundar, K.; Casbeer, D.W. Cooperative Routing for an Air-Ground Vehicle Team—Exact Algorithm, Transformation Method, and Heuristics. IEEE Trans. Autom. Sci. Eng. 2020, 17, 537–547. [Google Scholar] [CrossRef] [Green Version]
- Toorchi, N.; Hu, F.; Bentley, E.S.; Kumar, S. Skeleton-Based Swarm Routing (SSR): Intelligent Smooth Routing for Dynamic UAV Networks. IEEE Access 2021, 9, 1286–1303. [Google Scholar] [CrossRef]
- Gharib, M.; Afghah, F.; Bentley, E. OPAR: Optimized Predictive and Adaptive Routing for Cooperative UAV Networks. In Proceedings of the IEEE INFOCOM 2021—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Vancouver, BC, Canada, 10–13 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Lee, S.W.; Ali, S.; Yousefpoor, M.S.; Yousefpoor, E.; Lalbakhsh, P.; Javaheri, D.; Rahmani, A.M.; Hosseinzadeh, M. An Energy-Aware and Predictive Fuzzy Logic-Based Routing Scheme in Flying Ad Hoc Networks (FANETs). IEEE Access 2021, 9, 129977–130005. [Google Scholar] [CrossRef]
- Cheng, C.; Adulyasak, Y.; Rousseau, L.M. Drone routing with energy function: Formulation and exact algorithm. Transp. Res. Part Methodol. 2020, 139, 364–387. [Google Scholar] [CrossRef]
- Ghambari, S.; Lepagnot, J.; Jourdan, L.; Idoumghar, L. A comparative study of meta-heuristic algorithms for solving UAV path planning. In Proceedings of the 2018 IEEE Symposium Series on Computational Intelligence (SSCI), Bangalore, India, 18–21 November 2018; pp. 174–181. [Google Scholar] [CrossRef]
- Wei, X.; Yang, H.; Huang, W. A Genetic-Algorithm-Based Optimization Routing for FANETs. Front. Neurorobotics 2021, 15, 697624. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Che, C. A Brief Review of the Intelligent Algorithm for Traveling Salesman Problem in UAV Route Planning. In Proceedings of the 2019 IEEE 9th International Conference on Electronics Information and Emergency Communication (ICEIEC), Beijing, China, 12–14 July 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Xiang, S.; Wang, L.; Xing, L.; Du, Y. An effective memetic algorithm for UAV routing and orientation under uncertain navigation environments. Memetic Comput. 2021, 13, 169–183. [Google Scholar] [CrossRef]
- Sajid, M.; Mittal, H.; Pare, S.; Prasad, M. Routing and scheduling optimization for UAV assisted delivery system: A hybrid approach. Appl. Soft Comput. 2022, 126, 109225. [Google Scholar] [CrossRef]
- Zhang, S.; Lv, M.; Wang, Y.; Liu, W. Multi-UAVs Collaboration Routing Plan Based on Modified Artificial Bee Colony Algorithm. In Advances in Guidance, Navigation and Control: Proceedings of 2020 International Conference on Guidance, Navigation and Control, ICGNC 2020, Tianjin, China, 23–25 October 2020; Springer: Berlin/Heidelberg, Germany, 2022; pp. 933–943. [Google Scholar] [CrossRef]
- Marini, F.; Walczak, B. Particle swarm optimization (PSO). A tutorial. Chemom. Intell. Lab. Syst. 2015, 149, 153–165. [Google Scholar] [CrossRef]
- Sun, G.; Qin, D.; Lan, T.; Ma, L. Research on Clustering Routing Protocol Based on Improved PSO in FANET. IEEE Sens. J. 2021, 21, 27168–27185. [Google Scholar] [CrossRef]
- Ma, B.; Ren, Z.; Cheng, W. Credibility Computation Offloading Based Task-Driven Routing Strategy for Emergency UAVs Network. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Ozkan, O. Optimization of the distance-constrained multi-based multi-UAV routing problem with simulated annealing and local search-based matheuristic to detect forest fires: The case of Turkey. Appl. Soft Comput. 2021, 113, 108015. [Google Scholar] [CrossRef]
- Ozkan, O.; Kaya, M. UAV routing with genetic algorithm based matheuristic for border security missions. Int. J. Optim. Control. Theor. Appl. (IJOCTA) 2021, 11, 128–138. [Google Scholar] [CrossRef]
- Chowdhury, S.; Shahvari, O.; Marufuzzaman, M.; Li, X.; Bian, L. Drone routing and optimization for post-disaster inspection. Comput. Ind. Eng. 2021, 159, 107495. [Google Scholar] [CrossRef]
- François-Lavet, V.; Henderson, P.; Islam, R.; Bellemare, M.G.; Pineau, J. An Introduction to Deep Reinforcement Learning. Found. Trends Mach. Learn. 2018, 11, 219–354. [Google Scholar] [CrossRef] [Green Version]
- Rezwan, S.; Choi, W. A Survey on Applications of Reinforcement Learning in Flying Ad-Hoc Networks. Electronics 2021, 10, 449. [Google Scholar] [CrossRef]
- Zhang, P.; Wang, C.; Kumar, N.; Zhang, W.; Liu, L. Dynamic Virtual Network Embedding Algorithm Based on Graph Convolution Neural Network and Reinforcement Learning. IEEE Internet Things J. 2022, 9, 9389–9398. [Google Scholar] [CrossRef]
- Qiu, X.; Yang, Y.; Xu, L.; Yin, J.; Liao, Z. Maintaining Links in the Highly Dynamic FANET Using Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2023, 72, 2804–2818. [Google Scholar] [CrossRef]
- Wang, C.; Liu, L.; Jiang, C.; Wang, S.; Zhang, P.; Shen, S. Incorporating Distributed DRL Into Storage Resource Optimization of Space-Air-Ground Integrated Wireless Communication Network. IEEE J. Sel. Top. Signal Process. 2022, 16, 434–446. [Google Scholar] [CrossRef]
- Colonnese, S.; Cuomo, F.; Pagliari, G.; Chiaraviglio, L. Q-SQUARE: A Q-learning approach to provide a QoE aware UAV flight path in cellular networks. Ad Hoc Netw. 2019, 91, 101872. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Q.; He, C.; Jaffrès-Runser, K.; Xu, Y.; Li, Z.; Xu, Y. QMR:Q-learning based Multi-objective optimization Routing protocol for Flying Ad Hoc Networks. Comput. Commun. 2020, 150, 304–316. [Google Scholar] [CrossRef]
- Rovira-Sugranes, A.; Afghah, F.; Qu, J.; Razi, A. Fully-Echoed Q-Routing With Simulated Annealing Inference for Flying Adhoc Networks. IEEE Trans. Netw. Sci. Eng. 2021, 8, 2223–2234. [Google Scholar] [CrossRef]
- Khan, M.F.; Yau, K.L.A. Route Selection in 5G-based Flying Ad-hoc Networks using Reinforcement Learning. In Proceedings of the 2020 10th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 21–22 August 2020; pp. 23–28. [Google Scholar] [CrossRef]
- Deb, P.K.; Mukherjee, A.; Misra, S. XiA: Send-It-Anyway Q-Routing for 6G-Enabled UAV-LEO Communications. IEEE Trans. Netw. Sci. Eng. 2021, 8, 2722–2731. [Google Scholar] [CrossRef]
- Jiang, S.; Huang, Z.; Ji, Y. Adaptive UAV-Assisted Geographic Routing with Q-Learning in VANET. IEEE Commun. Lett. 2021, 25, 1358–1362. [Google Scholar] [CrossRef]
- Wang, W.; Liu, Y.; Srikant, R.; Ying, L. 3M-RL: Multi-Resolution, Multi-Agent, Mean-Field Reinforcement Learning for Autonomous UAV Routing. IEEE Trans. Intell. Transp. Syst. 2022, 23, 8985–8996. [Google Scholar] [CrossRef]
- Qiu, X.; Xu, L.; Wang, P.; Yang, Y.; Liao, Z. A Data-Driven Packet Routing Algorithm for an Unmanned Aerial Vehicle Swarm: A Multi-Agent Reinforcement Learning Approach. IEEE Wirel. Commun. Lett. 2022, 11, 2160–2164. [Google Scholar] [CrossRef]
- Wang, Z.; Yao, H.; Mai, T.; Xiong, Z.; Yu, F.R. Cooperative Reinforcement Learning Aided Dynamic Routing in UAV Swarm Networks. In Proceedings of the ICC 2022—IEEE International Conference on Communications, Seoul, Republic of Korea, 16–20 May 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Qiu, X.; Xie, Y.; Wang, Y.; Ye, L.; Yang, Y. QLGR: A Q-learning-based Geographic FANET Routing Algorithm Based on Multi-agent Reinforcement Learning. KSII Trans. Internet Inf. Syst. 2021, 15, 4244–4274. [Google Scholar] [CrossRef]
- Wang, X.; Fu, L.; Cheng, N.; Sun, R.; Luan, T.; Quan, W.; Aldubaikhy, K. Joint Flying Relay Location and Routing Optimization for 6G UAV–IoT Networks: A Graph Neural Network-Based Approach. Remote Sens. 2022, 14, 4377. [Google Scholar] [CrossRef]
- Quy, V.K.; Chehri, A.; Quy, N.M.; Han, N.D.; Ban, N.T. Innovative Trends in the 6G Era: A Comprehensive Survey of Architecture, Applications, Technologies, and Challenges. IEEE Access 2023, 11, 39824–39844. [Google Scholar] [CrossRef]
- Quy, V.K.; Nam, V.H.; Linh, D.M.; Ngoc, L.A. Routing Algorithms for MANET-IoT Networks: A Comprehensive Survey. Wirel. Pers. Commun. 2022, 125, 3501–3525. [Google Scholar] [CrossRef]
- Qu, H.; Luo, Y.; Zhao, J.; Luan, Z. An LBMRE-OLSR Routing Algorithm under the Emergency Scenarios in the Space-Air-Ground Integrated Networks. In Proceedings of the 2020 Information Communication Technologies Conference (ICTC), Nanjing, China, 29–31 May 2020; pp. 103–107. [Google Scholar] [CrossRef]
- Eiza, M.H.; Raschellà, A. A Hybrid SDN-based Architecture for Secure and QoS aware Routing in Space-Air-Ground Integrated Networks (SAGINs). In Proceedings of the 2023 IEEE Wireless Communications and Networking Conference (WCNC), Glasgow, UK, 26–29 March 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Huang, X.; Cheng, S.; Cao, K.; Cong, P.; Wei, T.; Hu, S. A Survey of Deployment Solutions and Optimization Strategies for Hybrid SDN Networks. IEEE Commun. Surv. Tutor. 2019, 21, 1483–1507. [Google Scholar] [CrossRef]
- Yang, Q.; Jang, S.J.; Yoo, S.J. Q-learning-based fuzzy logic for multi-objective routing algorithm in flying ad hoc networks. Wirel. Pers. Commun. 2020, 113, 115–138. [Google Scholar] [CrossRef]
- Hassan, M.A.; Ullah, S.I.; Khan, I.U.; Hussain Shah, S.B.; Salam, A.; Ullah Khan, A.W. Unmanned Aerial Vehicles Routing Formation Using Fisheye State Routing for Flying Ad-Hoc Networks. In Proceedings of the 4th International Conference on Future Networks and Distributed Systems (ICFNDS), St.Petersburg, Russia, 26–27 November 2020; Association for Computing Machinery: New York, NY, USA, 2021; pp. 1–7. [Google Scholar] [CrossRef]
- He, C.; Liu, S.; Han, S. A Fuzzy Logic Reinforcement Learning-Based Routing Algorithm For Flying Ad Hoc Networks. In Proceedings of the 2020 International Conference on Computing, Networking and Communications (ICNC), Big Island, HI, USA, 17–20 February 2020; pp. 987–991. [Google Scholar] [CrossRef]
- Hong, Y.W.P.; Cheng, R.H.; Hsiao, Y.C.; Sheu, J.P. Power-Efficient Trajectory Adjustment and Temporal Routing for Multi-UAV Networks. IEEE Trans. Green Commun. Netw. 2020, 4, 1106–1119. [Google Scholar] [CrossRef]
- Deshpande, A.A.; Chiariotti, F.; Zanella, A. SMURF: Reliable Multipath Routing in Flying Ad-Hoc Networks. In Proceedings of the 2020 Mediterranean Communication and Computer Networking Conference (MedComNet), Arona, Italy, 17–19 June 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Guo, J.; Gao, H.; Liu, Z.; Huang, F.; Zhang, J.; Li, X.; Ma, J. ICRA: An Intelligent Clustering Routing Approach for UAV Ad Hoc Networks. IEEE Trans. Intell. Transp. Syst. 2023, 24, 2447–2460. [Google Scholar] [CrossRef]
- Khochare, A.; Simmhan, Y.; Sorbelli, F.B.; Das, S.K. Heuristic Algorithms for Co-scheduling of Edge Analytics and Routes for UAV Fleet Missions. In Proceedings of the IEEE INFOCOM 2021—IEEE Conference on Computer Communications, Vancouver, BC, Canada, 10–13 May 2021; pp. 1–10. [Google Scholar] [CrossRef]
- Sarkar, S.; Totaro, M.W.; Kumar, A.; Elgazzar, K. Real-Time Object Processing and Routing for Intelligent Drones: A Novel Approach. Computer 2020, 53, 80–89. [Google Scholar] [CrossRef]
- Sonmez, A.; Kocyigit, E.; Kugu, E. Optimal path planning for UAVs using Genetic Algorithm. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 50–55. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, T.; Liu, T.; Zhang, Q.; Liu, Y. Deep Neural Network Routing with Dynamic Space Division for 3D UAV FANETs. Wirel. Pers. Commun. 2022, 125, 2003–2028. [Google Scholar] [CrossRef]
- Pustokhina, I.V.; Pustokhin, D.A.; Lydia, E.L.; Elhoseny, M.; Shankar, K. Energy Efficient Neuro-Fuzzy Cluster based Topology Construction with Metaheuristic Route Planning Algorithm for Unmanned Aerial Vehicles. Comput. Netw. 2021, 196, 108214. [Google Scholar] [CrossRef]
- Cheriguene, Y.; Djellikh, S.; Bousbaa, F.Z.; Lagraa, N.; Lakas, A.; Kerrache, C.A.; Karim Tahari, A.E. SEMRP: An Energy-efficient Multicast Routing Protocol for UAV Swarms. In Proceedings of the 2020 IEEE/ACM 24th International Symposium on Distributed Simulation and Real Time Applications (DS-RT), Prague, Czech Republic, 14–16 September 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Zhang, Y.; Qiu, H. DDQN with Prioritized Experience Replay-Based Optimized Geographical Routing Protocol of Considering Link Stability and Energy Prediction for UANET. Sensors 2022, 22, 5020. [Google Scholar] [CrossRef]
- Zhao, L.; Saldin, A.; Hu, J.; Fu, L.; Shi, J.; Guan, Y. A Novel Simulated Annealing based Routing Algorithm in F-SDNs. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020; pp. 1202–1207. [Google Scholar] [CrossRef]
- Ozkan, O.; Kilic, S. UAV routing by simulation-based optimization approaches for forest fire risk mitigation. Ann. Oper. Res. 2023, 320, 937–973. [Google Scholar] [CrossRef]
- Da Costa, L.A.L.; Kunst, R.; Pignaton de Freitas, E. Q-FANET: Improved Q-learning based routing protocol for FANETs. Comput. Netw. 2021, 198, 108379. [Google Scholar] [CrossRef]
- Leon-Blanco, J.M.; Gonzalez-R, P.; Andrade-Pineda, J.L.; Canca, D.; Calle, M. A multi-agent approach to the truck multi-drone routing problem. Expert Syst. Appl. 2022, 195, 116604. [Google Scholar] [CrossRef]
- Masone, A.; Poikonen, S.; Golden, B.L. The multivisit drone routing problem with edge launches: An iterative approach with discrete and continuous improvements. Networks 2022, 80, 193–215. [Google Scholar] [CrossRef]
- Ermağan, U.; Yıldız, B.; Salman, F.S. A learning based algorithm for drone routing. Comput. Oper. Res. 2022, 137, 105524. [Google Scholar] [CrossRef]
- Zhang, L.; Hu, F.; Chu, Z.; Bentley, E.; Kumar, S. 3D Transformative Routing for UAV Swarming Networks: A Skeleton-Guided, GPS-Free Approach. IEEE Trans. Veh. Technol. 2021, 70, 3685–3701. [Google Scholar] [CrossRef]
- Cheriguene, Y.; Bousbaa, F.Z.; Kerrache, C.A.; Djellikh, S.; Lagraa, N.; Lahby, M.; Lakas, A. COCOMA: A resource-optimized cooperative UAVs communication protocol for surveillance and monitoring applications. Wirel. Netw. 2022, 1–17. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, M.; Dong, C.; Feng, Y.; Yuan, Y.; Feng, S.; Quek, T.Q.S. Routing protocol for heterogeneous FANETs with mobility prediction. China Commun. 2022, 19, 186–201. [Google Scholar] [CrossRef]
- Tan, X.; Zuo, Z.; Su, S.; Guo, X.; Sun, X. Research of Security Routing Protocol for UAV Communication Network Based on AODV. Electronics 2020, 9, 1185. [Google Scholar] [CrossRef]
- Chen, Y.n.; Lyu, N.q.; Song, G.h.; Yang, B.w.; Jiang, X.h. A traffic-aware Q-network enhanced routing protocol based on GPSR for unmanned aerial vehicle ad-hoc networks. Front. Inf. Technol. Electron. Eng. 2020, 21, 1308–1320. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Network Scale (Sorties) | UAV Type | Method | Dataset Type | Simulation Platform |
|---|---|---|---|---|---|
| [82] | 76 | Small drones | GA+SA | Real dataset | Win10+Python |
| [102] | 20–70 | Small drones | MADDGP+LSTM | Self-generated | NS-3 |
| [103] | 10 | Small drones | MARL | Self-generated | Ubuntu16.04 |
| [81] | 100 | Small drones | MA+GA | Real dataset | Win10+Python |
| [111] | 15 | Small drones | Fuzzy Logic+Q-learning | Self-generated | MATLAB |
| [112] | 30 | Small drones | FSR+Dijkstra | Self-generated | NS-2 |
| [88] | 12 | Medium to large drones | GA+BM | Real dataset | MATLAB |
| [99] | 50 | N/A | Q-learning | Self-generated | NS-3 |
| [101] | 12 | N/A | MARL+CNN | Self-generated | MATLAB |
| [77] | 10–30 | Small drones | B&C | Self-generated | Python+Gurobi |
| [113] | 5–10 | Medium to large drones | Fuzzy Logic+RL | Self-generated | MATLAB |
| [100] | 25 | Medium to large drones | Fuzzy Logic+Q-learning+DFS | Self-generated | NS-3 |
| [114] | 14–18 | Medium to large drones | Minimize network power+K-means | Self-generated | MATLAB |
| [95] | 3 | Medium to large drones | Q-learning | Self-generated | MATLAB |
| [98] | 100–1000 | Medium to large drones | RL | Self-generated | MATLAB |
| [96] | 25 | Small drones | Q-learning | Self-generated | WSNet |
| [104] | 20, 40 | Small drones | Q-learning | Self-generated | NS-3 |
| [87] | 1–7 | Medium to large drones | SA+MILP | Real dataset | MATLAB+ILOG |
| [115] | 150 | Small drones | KF+Shortest-circuit algorithm | Self-generated | MATLAB |
| [75] | 50–100 | Medium to large drones | OPAR | Self-generated | NS-3 |
| [116] | 10–100 | Small drones | Greedy algorithm+HA+RL | Self-generated | OPNET |
| [117] | 5–100 | Medium to large drones | MILP+HA | Self-generated | Python+AWS c5n.4xlarge |
| [97] | 10–20 | Different types of drones | SA+Q-learning | Self-generated | N/A |
| [118] | 100 | Small drones | ACO | Real dataset | Raspberry Pi+Python |
| [119] | 25 | Different types of drones | GA | Real dataset | MATLAB |
| [120] | 200 | Small drones | DNN+Greedy algorithm | Self-generated | NS3 |
| [121] | 10-100 | Small drones | HA+Fuzzy clustering | Self-generated | MATLAB |
| [122] | 10–40 | Small drones | Multicast routing protocol algorithm | Self-generated | NS-2 |
| [123] | 40–100 | Small drones | DDQN | Self-generated | Python |
| [124] | 100 | Small drones | SA | Self-generated | Python+F-SDN |
| [85] | 20–200 | Small drones | PSO | Self-generated | MATLAB |
| [125] | 1–4 | Medium to large drones | LS+HA | Real dataset | MATLAB |
| [83] | 30 | N/A | ABC | Self-generated | N/A |
| [74] | 137 | Small drones | Online learning algorithm | Real dataset | MATLAB |
| [86] | 15 | Small drones | PSO | Real dataset | N/A |
| [126] | 25 | Small drones | Q-learning | Self-generated | WSNet |
| [127] | 1–6 | Small drones | Agent-based algorithms | Self-generated | Python+Windows |
| [89] | 5–30 | Small drones | ALNS+MBATA | Real dataset | Python+Gurobi |
| [128] | 10–100 | N/A | Routing conversion+Shortest path algorithms | Self-generated | Python+Gurobi +Windows |
| [129] | 20–40 | Small drones | L&F (HA) | Self-generated | Java+Python +CLPEX+ILOG |
| [130] | >100 | N/A | Hybrid algorithms | Self-generated | MATLAB+C++ |
| [131] | 10–40 | Small drones | Multicast routing algorithms | Self-generated | NS-2 |
| [76] | 100 | Small drones | Fuzzy logic | Self-generated | NS-2 |
| [108] | N/A | Small drones | Load-balancing dynamic routing algorithm | Self-generated | Windows+OPNET +C++ |
| [105] | 2–35 | Medium to large drones | GNN+RL | Self-generated | N/A |
| [132] | 10–200 | Medium to large drones | DPSO | Self-generated | N/A |
| [133] | 50 | Small drones | Digital signature algorithms | Self-generated | NS-2 |
| [134] | 60–100 | Small drones | RL | Self-generated | Python |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Wen, W.; Igorevich, K.K.; Ren, P.; Zhang, H.; Duan, Y.; Zhu, H.; Zhang, P. UAV Ad Hoc Network Routing Algorithms in Space–Air–Ground Integrated Networks: Challenges and Directions. Drones 2023, 7, 448. https://doi.org/10.3390/drones7070448
Lu Y, Wen W, Igorevich KK, Ren P, Zhang H, Duan Y, Zhu H, Zhang P. UAV Ad Hoc Network Routing Algorithms in Space–Air–Ground Integrated Networks: Challenges and Directions. Drones. 2023; 7(7):448. https://doi.org/10.3390/drones7070448
Chicago/Turabian StyleLu, Yuxi, Wu Wen, Kostromitin Konstantin Igorevich, Peng Ren, Hongxia Zhang, Youxiang Duan, Hailong Zhu, and Peiying Zhang. 2023. "UAV Ad Hoc Network Routing Algorithms in Space–Air–Ground Integrated Networks: Challenges and Directions" Drones 7, no. 7: 448. https://doi.org/10.3390/drones7070448