


Elevation Accuracy of Forest Road Maps Derived from Aerial Imaging, Airborne Laser Scanning and Mobile Laser Scanning Data
 , , , and
, , , and
Abstract
:
1. Introduction
2. Materials and Methods
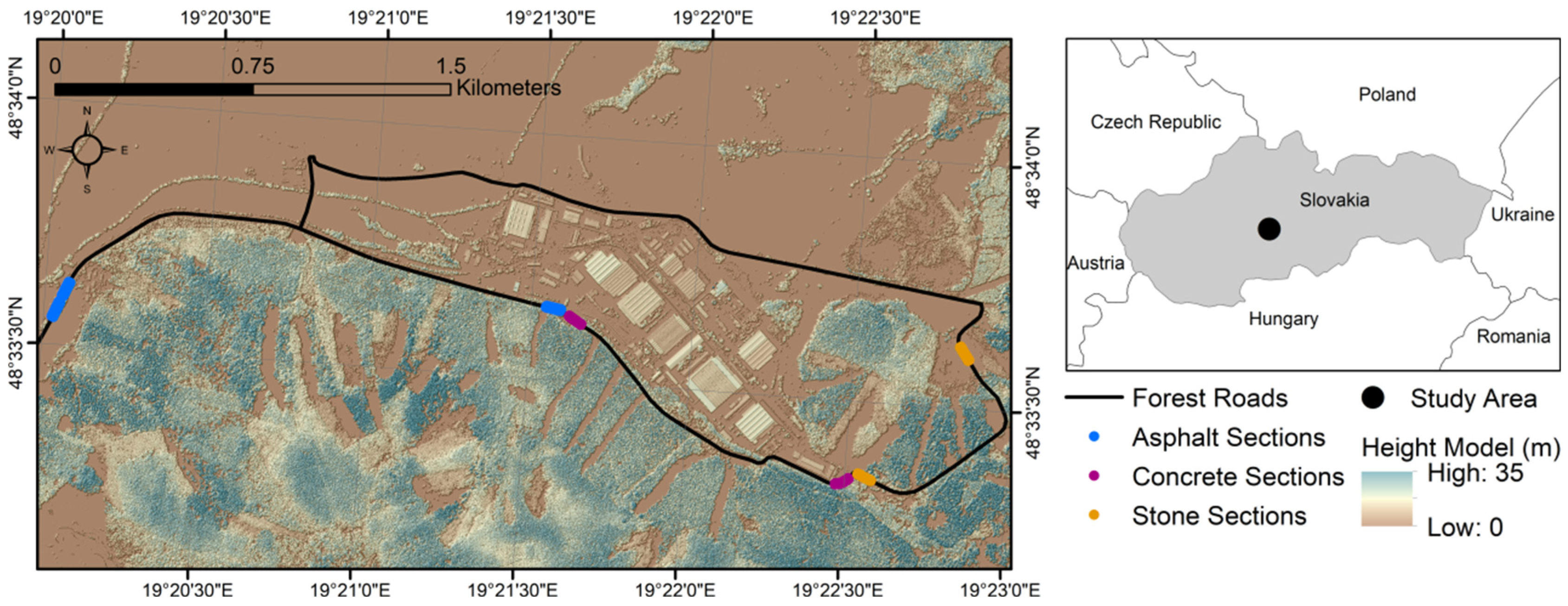
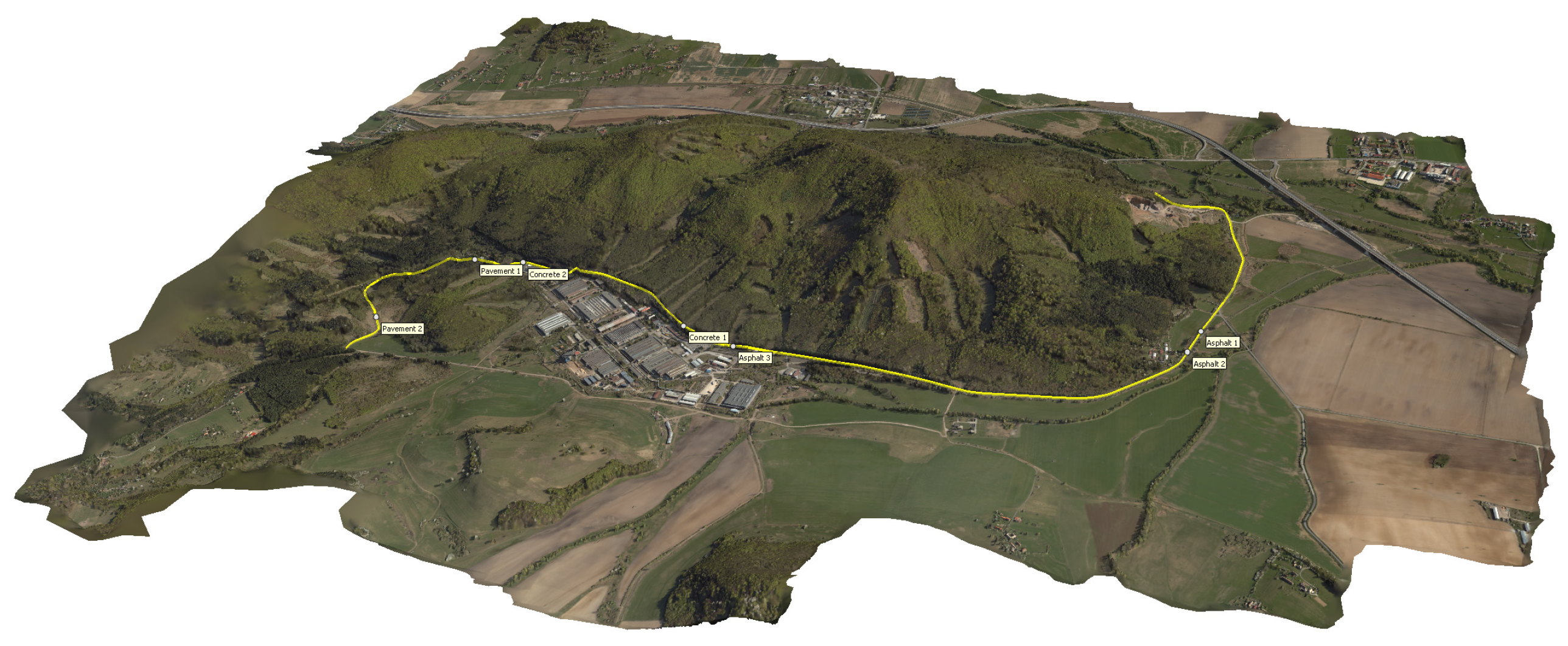
2.1. Study Area
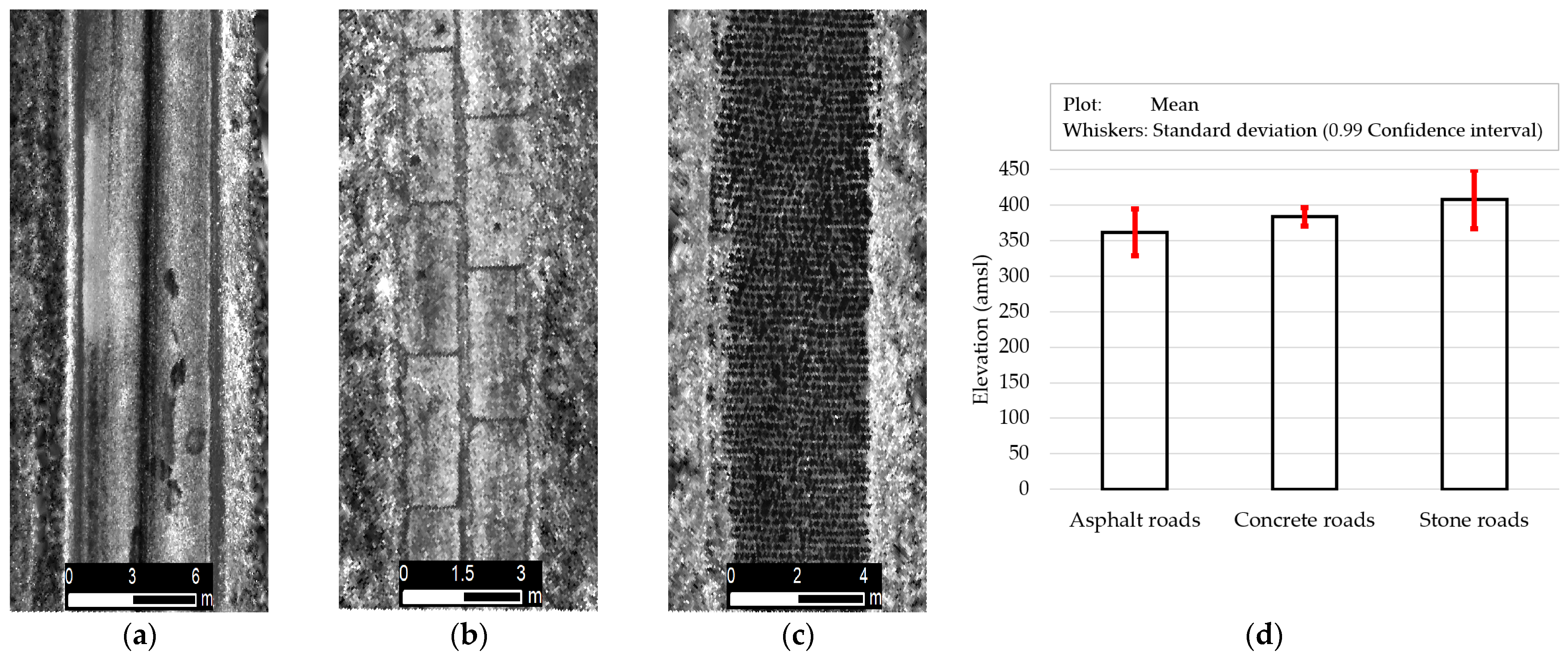
2.2. Ground Data
2.3. Aerial Imaging Data
2.4. Airborne Laser Scanning Data
2.5. Mobile Laser Scanning Data
2.6. Generation of Forest Road Maps
2.7. Assessment of Elevation Accuracy of Forest Road Maps
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hunt, L.M.; Hosegood, S. The Effectiveness of Signs at Restricting Vehicle Traffic: A Case of Seasonal Closures on Forest Access Roads. Can. J. For. Res. 2008, 38, 2306–2312. [Google Scholar] [CrossRef]
- Dudáková, Z.; Ferenčík, M.; Allman, M.; Merganičová, K.; Merganič, J.; Vlčková, M. Who Uses Forest Roads? Has the COVID-19 Pandemics Affected Their Recreational Usage? Case Study from Central Slovakia. Forests 2022, 13, 458. [Google Scholar] [CrossRef]
- Apollo, M.; Andreychouk, V. Trampling Intensity and Vegetation Response and Recovery According to Altitude: An Experimental Study from the Himalayan Miyar Valley. Resources 2020, 9, 98. [Google Scholar] [CrossRef]
- Apollo, M.; Andreychouk, V.; Bhattarai, S.S. Short-Term Impacts of Livestock Grazing on Vegetation and Track Formation in a High Mountain Environment: A Case Study from the Himalayan Miyar Valley (India). Sustainability 2018, 10, 951. [Google Scholar] [CrossRef]
- Fidelus-Orzechowska, J.; Strzyżowski, D.; Żelazny, M. The Geomorphic Activity of Forest Roads and Its Dependencies in the Tatra Mountains. Geogr. Ann. Ser. A Phys. Geogr. 2018, 100, 59–74. [Google Scholar] [CrossRef]
- Lehtomäki, M.; Jaakkola, A.; Hyyppä, J.; Kukko, A.; Kaartinen, H. Detection of Vertical Pole-Like Objects in a Road Environment Using Vehicle-Based Laser Scanning Data. Remote Sens. 2010, 2, 641–664. [Google Scholar] [CrossRef]
- Morley, I.; Coops, N.; Roussel, J.-R.; Achim, A.; Dech, J.; Meecham, D.; McCartney, G.; Reid, D.; McPherson, S.; Quist, L.; et al. Updating Forest Road Networks Using Single Photon LiDAR in Northern Forest Environments. For. Int. J. For. Res. 2023, 97, 38–47. [Google Scholar] [CrossRef]
- Labelle, E.R.; Poltorak, B.; Jaeger, D. Soil Displacement during Ground-Based Mechanized Forest Operations Using Mixed-Wood Brush Mats. Soil Tillage Res. 2018, 179, 96–104. [Google Scholar] [CrossRef]
- Cambi, M.; Certini, G.; Fabiano, F.; Foderi, C.; Laschi, A.; Picchio, R. Impact of Wheeled and Tracked Tractors on Soil Physical Properties in a Mixed Conifer Stand. Iforest Biogeosciences For. 2015, 9, e1–e6. [Google Scholar] [CrossRef]
- Hrůza, P.; Mikita, T.; Tyagur, N.; Krejza, Z.; Cibulka, M.; Procházková, A.; Patočka, Z. Detecting Forest Road Wearing Course Damage Using Different Methods of Remote Sensing. Remote Sens. 2018, 10, 492. [Google Scholar] [CrossRef]
- Karila, K.; Matikainen, L.; Puttonen, E.; Hyyppä, J. Feasibility of Multispectral Airborne Laser Scanning Data for Road Mapping. IEEE Geosci. Remote Sens. Lett. 2017, 14, 294–298. [Google Scholar] [CrossRef]
- White, R.A.; Dietterick, B.C.; Mastin, T.; Strohman, R. Forest Roads Mapped Using LiDAR in Steep Forested Terrain. Remote Sens. 2010, 2, 1120–1141. [Google Scholar] [CrossRef]
- Buján, S.; Guerra, J.; González-Ferreiro, E.; Miranda, D. Forest Road Detection Using LiDAR Data and Hybrid Classification. Remote Sens. 2021, 13, 393. [Google Scholar] [CrossRef]
- Kumar, P.; Angelats, E. An Automated Road Roughness Detection from Mobile Laser Scanning Data. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017; XLII-1/W1, 91–96. [Google Scholar] [CrossRef]
- Mikita, T.; Krausková, D.; Hrůza, P.; Cibulka, M.; Patocka, Z. Forest Road Wearing Course Damage Assessment Possibilities with Different Types of Laser Scanning Methods Including New iPhone LiDAR Scanning Apps. Forests 2022, 13, 1763. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; White, J.C. Digital Aerial Photogrammetry for Updating Area-Based Forest Inventories: A Review of Opportunities, Challenges, and Future Directions. Curr For. Rep 2019, 5, 55–75. [Google Scholar] [CrossRef]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic Structure from Motion: A New Development in Photogrammetric Measurement. Earth Surf. Process. Landf. 2013, 38, 421–430. [Google Scholar] [CrossRef]
- Borowski, Ł.; Pieńko, M.; Wielgos, P. Evaluation of Inventory Surveying of Façade Scaffolding Conducted during ORKWIZ Project. In Proceedings of the 2017 Baltic Geodetic Congress (BGC Geomatics), Gdansk, Poland, 22–25 June 2017; pp. 189–192. [Google Scholar] [CrossRef]
- Gil, A.L.; Núñez-Casillas, L.; Isenburg, M.; Benito, A.A.; Bello, J.J.R.; Arbelo, M. A Comparison between LiDAR and Photogrammetry Digital Terrain Models in a Forest Area on Tenerife Island. Can. J. Remote Sens. 2013, 39, 396–409. [Google Scholar] [CrossRef]
- Iglesias, L.; De Santos-Berbel, C.; Pascual, V.; Castro, M. Using Small Unmanned Aerial Vehicle in 3D Modeling of Highways with Tree-Covered Roadsides to Estimate Sight Distance. Remote Sens. 2019, 11, 2625. [Google Scholar] [CrossRef]
- Apollo, M.; Jakubiak, M.; Nistor, S.; Lewińska, P.; Krawczyk, A.; Borowski, Ł.; Specht, M.; Krzykowska-Piotrowska, K.; Marchel, Ł.; Pęska-Siwik, A.; et al. Geodata in Science—A Review of Selected Scientific Fields. Acta Sci. Pol. Form. Circumiectus 2023, 22, 17–40. [Google Scholar] [CrossRef]
- Maciuk, K.; Apollo, M.; Mostowska, J.; Lepeška, T.; Poklar, M.; Noszczyk, T.; Kroh, P.; Krawczyk, A.; Borowski, Ł.; Pavlovčič-Prešeren, P. Altitude on Cartographic Materials and Its Correction According to New Measurement Techniques. Remote Sens. 2021, 13, 444. [Google Scholar] [CrossRef]
- Reutebuch, S.E.; McGaughey, R.J.; Andersen, H.-E.; Carson, W.W. Accuracy of a High-Resolution Lidar Terrain Model under a Conifer Forest Canopy. Can. J. Remote Sens. 2003, 29, 527–535. [Google Scholar] [CrossRef]
- Kraus, K.; Pfeifer, N. Determination of Terrain Models in Wooded Areas with Airborne Laser Scanner Data. ISPRS J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar] [CrossRef]
- David, N.; Mallet, C.; Pons, T.; Chauve, A.; Bretar, F. Pathway Detection and Geometrical Description from ALS Data in Forested Moutaneous Area. In Laser Scanning; Bretar, F., Pierrot-Deseilligny, M., Vosselman, G., Eds.; IAPRS: Paris, France, 2009; Volume 38, pp. 242–247. [Google Scholar]
- Waga, K.; Malinen, J.; Tokola, T. Forest Road Quality Control Using ALS Data. Can. J. For. Res. 2015, 45, 11. [Google Scholar] [CrossRef]
- Azizi, Z.; Najafi, A.; Sadeghian, S. Forest Road Detection Using LiDAR Data. J. For. Res. 2014, 25, 975–980. [Google Scholar] [CrossRef]
- Clode, S.; Rottensteiner, F.; Kootsookos, P.; Zelniker, E. Detection and Vectorization of Roads from Lidar Data. Photogramm. Eng. Remote Sens. 2007, 73, 517–535. [Google Scholar] [CrossRef]
- Hejmanowska, B.; Warchoł, A. Comparison of the Elevation Obtained from Als, Ads40 Stereoscopic Measurements and GPS. Acta Sci. Pol. Geod. Et Descr. Terrarum 2010, 9, 13–24. [Google Scholar]
- Warchoł, A. Use of Signal Intensity Indices in The Process of Extracting A Road Network From Lidar Data. Arch. Fotogram. Kartogr. I Teledetekcji 2009, 20, 433–444. [Google Scholar]
- Prendes Pérez, C.; Buján, S.; Ordóñez, C.; Canga, E. Large Scale Semi-Automatic Detection of Forest Roads from Low Density LiDAR Data on Steep Terrain in Northern Spain. Iforest Biogeosciences For. 2019, 12, 366–374. [Google Scholar] [CrossRef]
- Heidari, M.; Najafi, A.; Borges, J. Forest Roads Damage Detection Based on Deep Learning Algorithms. Scand. J. For. Res. 2022, 37, 366–375. [Google Scholar] [CrossRef]
- Kearney, S.P.; Coops, N.; Sethi, S.; Stenhouse, G. Maintaining Accurate, Current, Rural Road Network Data: An Extraction and Updating Routine Using RapidEye, Participatory GIS and Deep Learning. Int. J. Appl. Earth Obs. Geoinf. 2020, 87, 102031. [Google Scholar] [CrossRef]
- Ferraz, A.; Mallet, C.; Chehata, N. Large-Scale Road Detection in Forested Mountainous Areas Using Airborne Topographic Lidar Data. ISPRS J. Photogramm. Remote Sens. 2016, 112, 23–36. [Google Scholar] [CrossRef]
- Botes, D. Accuracy Assessment: Mobile Laser Scanning versus Competing Methods. In Proceedings of the South African Surveying and Geomatics Indaba (SASGI) Proceedings, Ekurhuleni, South Africa, 23–24 July 2013; p. 16. [Google Scholar]
- Xu, S.; Cheng, P.; Zhang, Y.; Ding, P. Error Analysis and Accuracy Assessment of Mobile Laser Scanning System. Open Autom. Control. Syst. J. 2015, 7, 485–495. [Google Scholar] [CrossRef]
- Ferenčík, M.; Kardoš, M.; Allman, M.; Slatkovská, Z. Detection of Forest Road Damage Using Mobile Laser Profilometry. Comput. Electron. Agric. 2019, 166, 105010. [Google Scholar] [CrossRef]
- Marinello, F.; Proto, A.R.; Zimbalatti, G.; Pezzuolo, A.; Cavalli, R.; Grigolato, S. Determination of Forest Road Surface Roughness by Kinect Depth Imaging. Ann. For. Res. 2017, 60, 2. [Google Scholar] [CrossRef]
- Burrough, P.A. Principles of Geographical Information Systems for Land Resources Assessment; Oxford [Oxfordshire]; Clarendon Press: New York, NY, USA; Oxford University Press: Oxford, UK, 1986; ISBN 978-0-19-854563-7. [Google Scholar]
- Jaara, K.; Lecordix, F. Extraction of Cartographic Contour Lines Using Digital Terrain Model (DTM). Cartogr. J. 2011, 48, 131–137. [Google Scholar] [CrossRef]
- Wulder, M.; Bater, C.; Coops, N.; Hilker, T.; White, J. The Role of LiDAR in Sustainable Forest Management. For. Chron. 2008, 84, 807–826. [Google Scholar] [CrossRef]
- Aruga, K.; Sessions, J.; Miyata, E.S. Forest Road Design with Soil Sediment Evaluation Using a High-Resolution DEM. J Res 2005, 10, 471–479. [Google Scholar] [CrossRef]
- Taş, İ.; KASKA, M.; Akay, A. Assessment of Using UAV Photogrammetry Based DEM and Ground-Measurement Based DEM in Computer-Assisted Forest Road Design. Eur. J. For. Eng. 2023, 9, 1–9. [Google Scholar] [CrossRef]
- Danilović, M.; Ristić, R.; Stojnić, D.; Antonić, S.; Dražić, S. Evaluation of Morphometric Terrain Parameters and Their Influence on Determining Optimal Density of Primary Forest Road Network. Croat. J. For. Eng. 2023, 44, 12. [Google Scholar] [CrossRef]
- Skaloud, J.; Schaer, P. Automated Assessment of Digital Terrain Models Derived From Airborne Laser Scanning. Photogramm. Fernerkund. Geoinf. 2012, 2012, 105–114. [Google Scholar] [CrossRef]
- Hofmann, S.; Brenner, C. Accuracy Assessment of Mobile Mapping Point Clouds Using the Existing Environment as Terrestrial Reference. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016; XLI-B1, 601–608. [Google Scholar] [CrossRef]
- Poreba, M.; Goulette, F. Assesing the Accuracy of Terrestrial Mobile Laser Surveys. Geomat. Enironmental Eng. 2012, 6, 73–81. [Google Scholar] [CrossRef]
- Höhle, J.; Potuckova, M.; Assessment of the Quality of Digital Terrain Models. Official Publication–EuroSDR 2011. Available online: http://www.eurosdr.net/sites/default/files/uploaded_files/eurosdr_publication_ndeg_60.pdf (accessed on 19 March 2024).
- Sačkov, I.; Kardoš, M. Forest Delineation Based on LiDAR Data and Vertical Accuracy of the Terrain Model in Forest and Non-Forest Area. Ann. For. Res. 2014, 57, 1. [Google Scholar] [CrossRef]
- Hyyppä, H.; Yu, X.; Hyyppä, J.; Kaartinen, H.; Kaasalainen, S.; Honkavaara, E.; Rönnholm, P. Factors Affecting the Quality of DTM Generation in Forested Areas. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2004, 36, 85–90. [Google Scholar]
- Balenović, I.; Gasparovic, M.; Anita, S.M.; Berta, A.; Seletković, A. Accuracy Assessment of Digital Terrain Models of Lowland Pedunculate Oak Forests Derived from Airborne Laser Scanning and Photogrammetry. Croat. J. For. Eng. 2018, 39, 117–128. [Google Scholar]
- Kraus, K. Photogrammetrie; Walter de Gruyter: Berlin, Germany, 2004; ISBN 978-3-11-017708-4. [Google Scholar]
- Karel, W.; Pfeifer, N.; Briese, C. Dtm quality assessment. In Proceedings of the ISPRS Technical Commission II Symposium, Vienna, Austria, 12–14 July 2006; p. 6. [Google Scholar]
- Wolf, R.P.; Dewitt, A.B.; Wilkinson, E.B. Elements of Photogrammetry with Applications in GIS, 4th ed.; McGraw-Hill Education, New York, NY, USA, 2014; ISBN 978-0-07-176112-3.
- Rahmayudi, A.; Rizaldy, A. Comparison of Semi Automatic DTM from Image Matching with DTM from Lidar. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016; XLI-B3, 373–380. [Google Scholar] [CrossRef]
- Hobi, M.L.; Ginzler, C. Accuracy Assessment of Digital Surface Models Based on WorldView-2 and ADS80 Stereo Remote Sensing Data. Sensors 2012, 12, 6347–6368. [Google Scholar] [CrossRef] [PubMed]
- Su, J.; Bork, E. Influence of Vegetation, Slope, and Lidar Sampling Angle on DEM Accuracy. Photogramm. Eng. Remote Sens. 2006, 72, 1265–1274. [Google Scholar] [CrossRef]
- Hodgson, M.E.; Jensen, J.R.; Schmidt, L.; Schill, S.; Davis, B. An Evaluation of LIDAR- and IFSAR-Derived Digital Elevation Models in Leaf-on Conditions with USGS Level 1 and Level 2 DEMs. Remote Sens. Environ. 2003, 84, 295–308. [Google Scholar] [CrossRef]
- Ligas, M.; Lucki, B.; Banasik, P. A Crossvalidation-Based Comparison of Kriging and IDW in Local GNSS/Levelling Quasigeoid Modelling. Rep. Geod. Geoinformatics 2022, 114, 1–7. [Google Scholar] [CrossRef]
- Radanović, M.; Bašić, T. Accuracy assessment and comparison of interpolation methods on geoid models. Geodetski Vestnik 2018, 62, 68–78. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Surface | Technology | Aerial Imaging | Airborne Laser Scanning | Mobile Laser Scanning | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Technique | ē | se | RMSE | ē | se | RMSE | ē | se | RMSE | |
| AsphaltConcreteStone | IDW | 0.12 | 0.14 | 0.18 | 0.02 | 0.04 | 0.05 | −0.01 | 0.02 | 0.02 |
| NN | 0.12 | 0.14 | 0.19 | 0.02 | 0.04 | 0.05 | −0.01 | 0.02 | 0.02 | |
| PtR-Avg | 0.12 | 0.14 | 0.18 | 0.02 | 0.04 | 0.05 | −0.01 | 0.02 | 0.02 | |
| PtR-Max | 0.14 | 0.14 | 0.20 | 0.02 | 0.04 | 0.05 | 0.03 | 0.05 | 0.05 | |
| PtR-Min | 0.09 | 0.14 | 0.17 | −0.02 | 0.05 | 0.05 | −0.03 | 0.02 | 0.03 | |
| Asphalt | IDW | 0.18 | 0.12 | 0.22 | 0.03 | 0.02 | 0.04 | 0.00 | 0.01 | 0.01 |
| NN | 0.18 | 0.12 | 0.22 | 0.04 | 0.03 | 0.04 | 0.00 | 0.01 | 0.01 | |
| PtR-Avg | 0.18 | 0.12 | 0.22 | 0.03 | 0.02 | 0.04 | 0.00 | 0.01 | 0.01 | |
| PtR-Max | 0.20 | 0.12 | 0.23 | 0.03 | 0.02 | 0.04 | 0.02 | 0.03 | 0.04 | |
| PtR-Min | 0.16 | 0.13 | 0.20 | 0.00 | 0.03 | 0.03 | −0.02 | 0.01 | 0.02 | |
| Concrete | IDW | 0.06 | 0.14 | 0.15 | −0.01 | 0.05 | 0.05 | −0.01 | 0.02 | 0.02 |
| NN | 0.06 | 0.15 | 0.16 | −0.01 | 0.05 | 0.05 | −0.01 | 0.02 | 0.02 | |
| PtR-Avg | 0.06 | 0.13 | 0.15 | −0.01 | 0.05 | 0.05 | −0.01 | 0.02 | 0.02 | |
| PtR-Max | 0.10 | 0.16 | 0.19 | −0.01 | 0.05 | 0.05 | 0.04 | 0.05 | 0.07 | |
| PtR-Min | 0.02 | 0.12 | 0.12 | −0.04 | 0.05 | 0.06 | −0.03 | 0.02 | 0.04 | |
| Stone | IDW | 0.03 | 0.11 | 0.12 | 0.01 | 0.05 | 0.05 | −0.02 | 0.02 | 0.03 |
| NN | 0.03 | 0.11 | 0.11 | 0.02 | 0.05 | 0.05 | −0.02 | 0.02 | 0.03 | |
| PtR-Avg | 0.03 | 0.11 | 0.12 | 0.01 | 0.05 | 0.05 | −0.02 | 0.02 | 0.03 | |
| PtR-Max | 0.05 | 0.12 | 0.13 | 0.01 | 0.05 | 0.05 | 0.03 | 0.06 | 0.06 | |
| PtR-Min | 0.01 | 0.11 | 0.11 | −0.03 | 0.05 | 0.05 | −0.05 | 0.01 | 0.05 | |
| Surface | Asphalt | |||||
| Technique | Ground | IDW | NN | PtR-Avg | PtR-Max | PtR-Min |
| Ground | ||||||
| IDW | p < 0.05 | |||||
| NN | p < 0.05 | 0.76 | ||||
| PtR-Avg | p < 0.05 | 0.59 | 0.89 | |||
| PtR-Max | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | ||
| PtR-Min | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | |
| Surface | Concrete | |||||
| Technique | Ground | IDW | NN | PtR-Avg | PtR-Max | PtR-Min |
| Ground | ||||||
| IDW | p < 0.05 | |||||
| NN | p < 0.05 | 0.42 | ||||
| PtR-Avg | p < 0.05 | 0.23 | 0.21 | |||
| PtR-Max | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | ||
| PtR-Min | 0.10 | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | |
| Surface | Stone | |||||
| Technique | Ground | IDW | NN | PtR-Avg | PtR-Max | PtR-Min |
| Ground | ||||||
| IDW | 0.19 | |||||
| NN | 0.23 | 0.29 | ||||
| PtR-Avg | 0.18 | 0.14 | 0.25 | |||
| PtR-Max | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | ||
| PtR-Min | 0.94 | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | |
| Surface | Asphalt | |||||
| Technique | Ground | IDW | NN | PtR-Avg | PtR-Max | PtR-Min |
| Ground | ||||||
| IDW | p < 0.05 | |||||
| NN | p < 0.05 | 0.19 | ||||
| PtR-Avg | p < 0.05 | 0.80 | 0.18 | |||
| PtR-Max | p < 0.05 | 0.80 | 0.18 | p < 0.05 | ||
| PtR-Min | 0.06 | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | |
| Surface | Concrete | |||||
| Technique | Ground | IDW | NN | PtR-Avg | PtR-Max | PtR-Min |
| Ground | ||||||
| IDW | p < 0.05 | |||||
| NN | p < 0.05 | 0.23 | ||||
| PtR-Avg | p < 0.05 | 0.08 | 0.14 | |||
| PtR-Max | p < 0.05 | 0.08 | 0.14 | p < 0.05 | ||
| PtR-Min | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | |
| Surface | Stone | |||||
| Technique | Ground | IDW | NN | PtR-Avg | PtR-Max | PtR-Min |
| Ground | ||||||
| IDW | p < 0.05 | |||||
| NN | p < 0.05 | 0.07 | ||||
| PtR-Avg | p < 0.05 | 0.43 | 0.09 | |||
| PtR-Max | p < 0.05 | 0.43 | 0.09 | p < 0.05 | ||
| PtR-Min | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | |
| Surface | Asphalt | |||||
| Technique | Ground | IDW | NN | PtR-Avg | PtR-Max | PtR-Min |
| Ground | ||||||
| IDW | p < 0.05 | |||||
| NN | p < 0.05 | p < 0.05 | ||||
| PtR-Avg | p < 0.05 | 0.64 | 0.06 | |||
| PtR-Max | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | ||
| PtR-Min | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | |
| Surface | Concrete | |||||
| Technique | Ground | IDW | NN | PtR-Avg | PtR-Max | PtR-Min |
| Ground | ||||||
| IDW | p < 0.05 | |||||
| NN | p < 0.05 | 0.36 | ||||
| PtR-Avg | p < 0.05 | 0.67 | 0.43 | |||
| PtR-Max | 0.13 | p < 0.05 | p < 0.05 | p < 0.05 | ||
| PtR-Min | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | |
| Surface | Stone | |||||
| Technique | Ground | IDW | NN | PtR-Avg | PtR-Max | PtR-Min |
| Ground | ||||||
| IDW | p < 0.05 | |||||
| NN | p < 0.05 | 0.79 | ||||
| PtR-Avg | p < 0.05 | 0.38 | 0.77 | |||
| PtR-Max | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | ||
| PtR-Min | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | p < 0.05 | |
| Technique | Surface | ||
| Asphalt | Concrete | Stone | |
| IDW | p < 0.05 | 0.33 | p < 0.05 |
| NN | p < 0.05 | 0.57 | p < 0.05 |
| PtR-Avg | p < 0.05 | 0.26 | p < 0.05 |
| PtR-Max | p < 0.05 | p < 0.05 | p < 0.05 |
| PtR-Min | p < 0.05 | p < 0.05 | 0.21 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kardoš, M.; Sačkov, I.; Tomaštík, J.; Basista, I.; Borowski, Ł.; Ferenčík, M. Elevation Accuracy of Forest Road Maps Derived from Aerial Imaging, Airborne Laser Scanning and Mobile Laser Scanning Data. Forests 2024, 15, 840. https://doi.org/10.3390/f15050840
Kardoš M, Sačkov I, Tomaštík J, Basista I, Borowski Ł, Ferenčík M. Elevation Accuracy of Forest Road Maps Derived from Aerial Imaging, Airborne Laser Scanning and Mobile Laser Scanning Data. Forests. 2024; 15(5):840. https://doi.org/10.3390/f15050840
Chicago/Turabian StyleKardoš, Miroslav, Ivan Sačkov, Julián Tomaštík, Izabela Basista, Łukasz Borowski, and Michal Ferenčík. 2024. "Elevation Accuracy of Forest Road Maps Derived from Aerial Imaging, Airborne Laser Scanning and Mobile Laser Scanning Data" Forests 15, no. 5: 840. https://doi.org/10.3390/f15050840