

Design and Validation of a Variable-Rate Control Metering Mechanism and Smart Monitoring System for a High-Precision Sugarcane Transplanter

 , ,
, ,  ,
,  , and
, and 
Abstract
:1. Introduction
- Design and assess the performance of a variable-rate control metering mechanism (VRCMM) for sugarcane transplanting based on IoT technology.
- Design and test a remote smart monitoring system (RSMS) for a precise sugarcane transplanter based on an ultrasonic sensor, IoT technology, Android, and wireless communication.
2. Materials and Methods
2.1. SSs
2.2. Overall Structure and Principles of Working
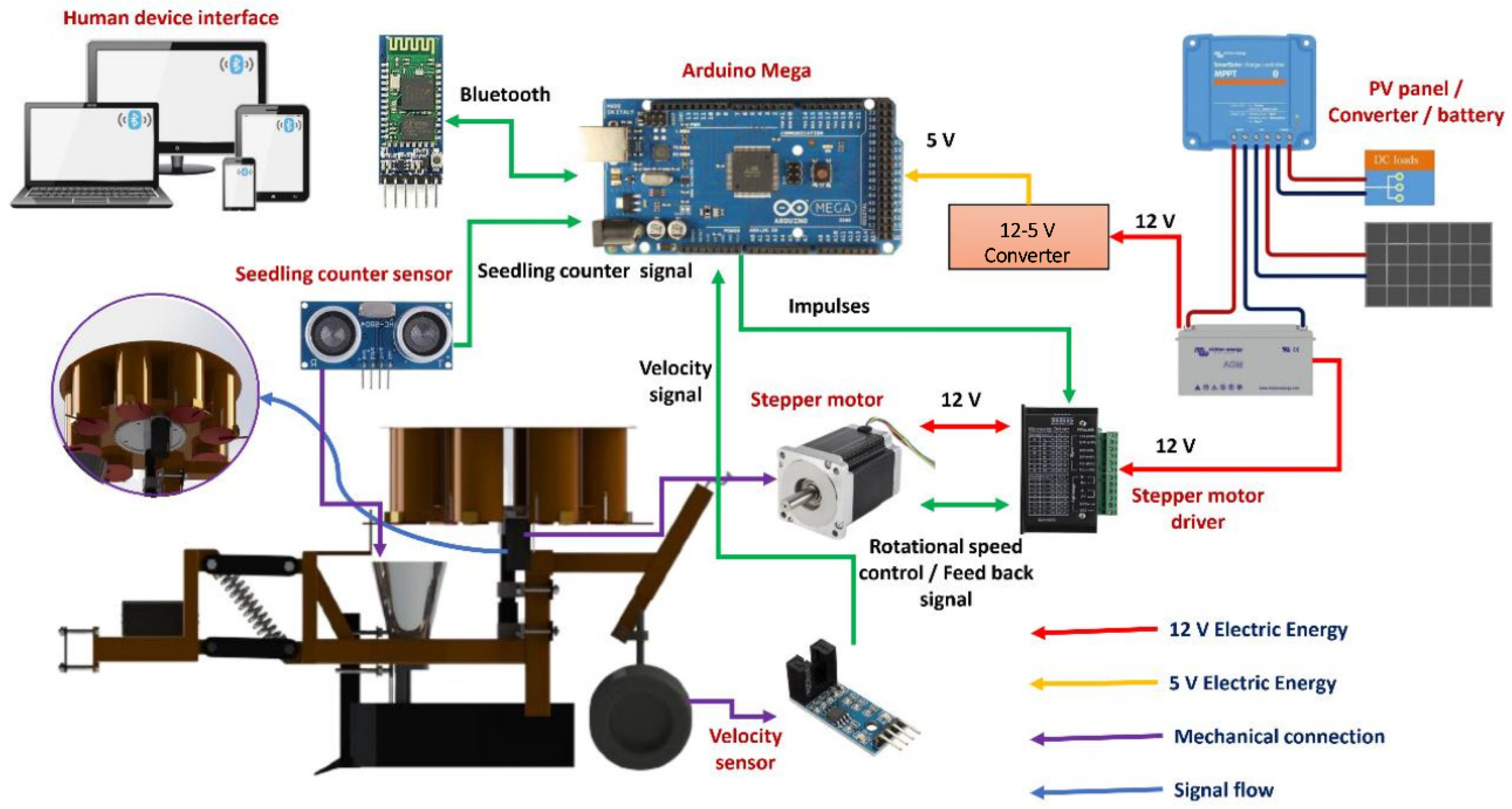
2.3. Design of Electronic Circuits for VRCMM and RSMS
2.3.1. Speed Sensor
2.3.2. Ultrasonic Sensor (Seedling Counter Sensor)
2.4. Variable-Rate Control Metering Mechanism (VRCMM)
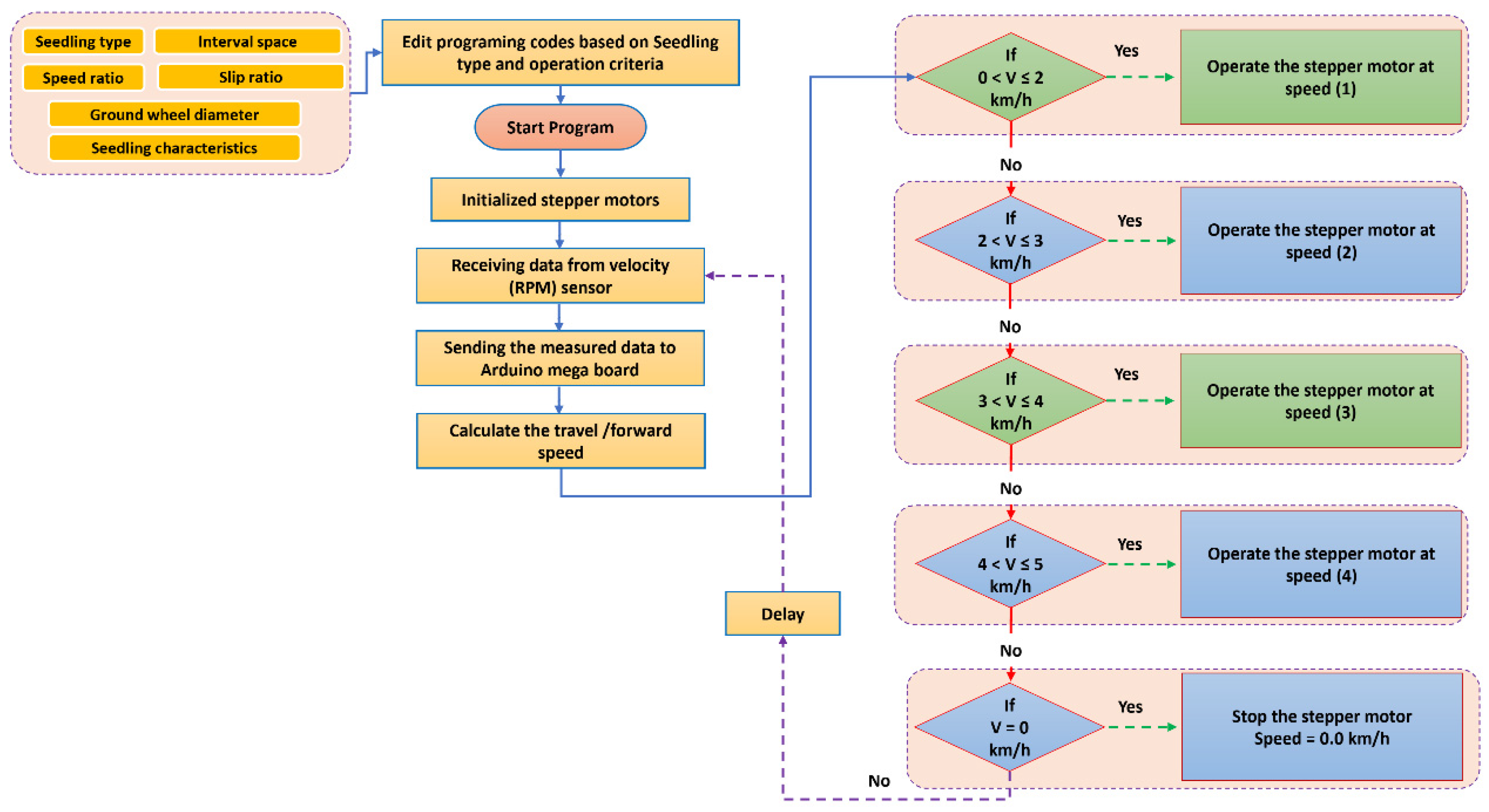
2.4.1. Forward Speed
2.4.2. Operating Algorithm of the VRCMM
2.5. Seedling Counter System (SCS)
2.5.1. Calculation of SCS
2.5.2. Design of a Seedling Counter System (SCS)
2.6. Remote Smart Monitoring System (RSMS)
2.7. Laboratory Experiment
2.8. Calibrating and Performance Evaluation of the VRCMM
2.9. Performance Evaluation of the RSMS
2.10. Statistical Analysis
3. Results and Discussion
3.1. Testing of the VRCMM
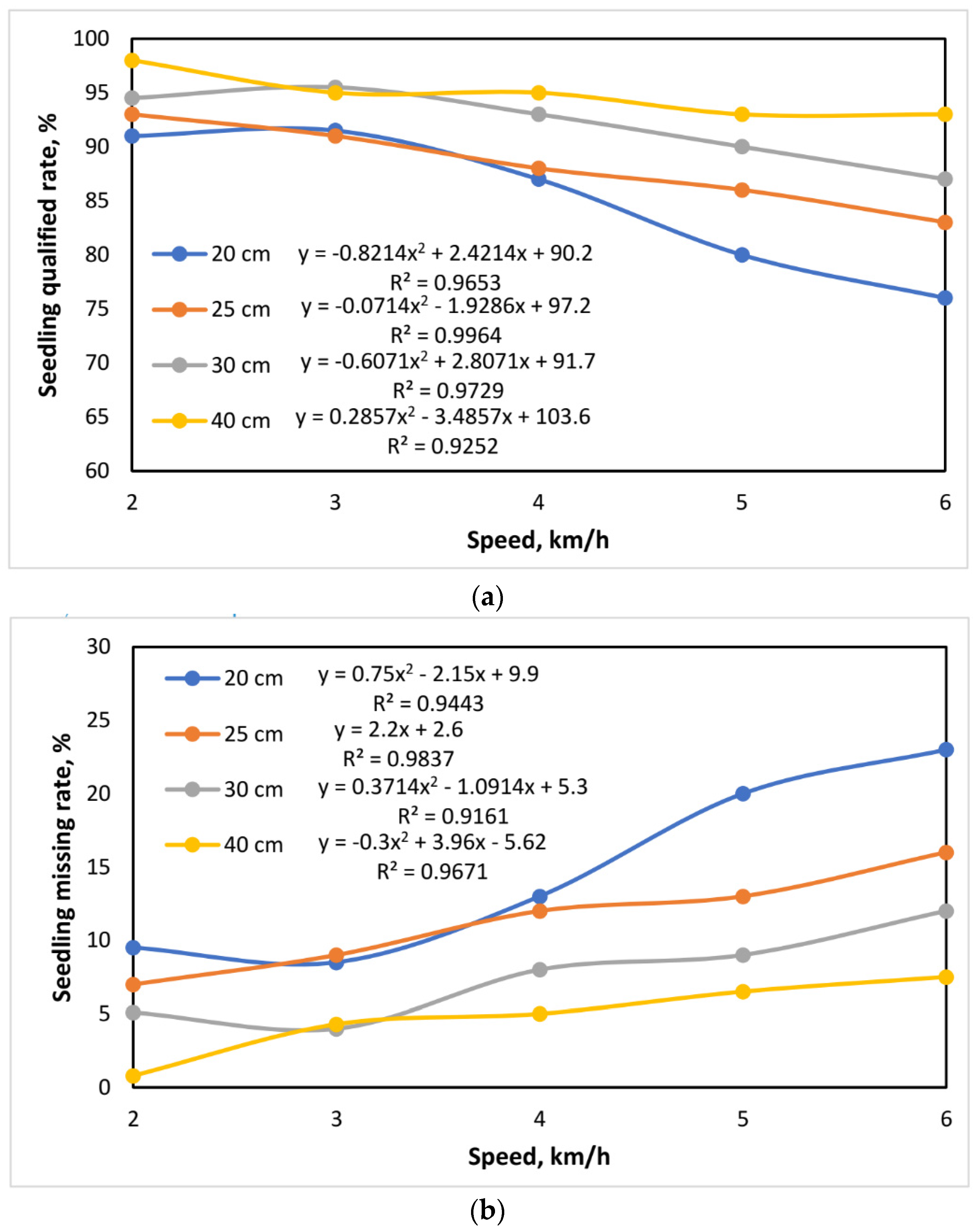
3.2. The Effect of Travel Speed on the RSMS Results
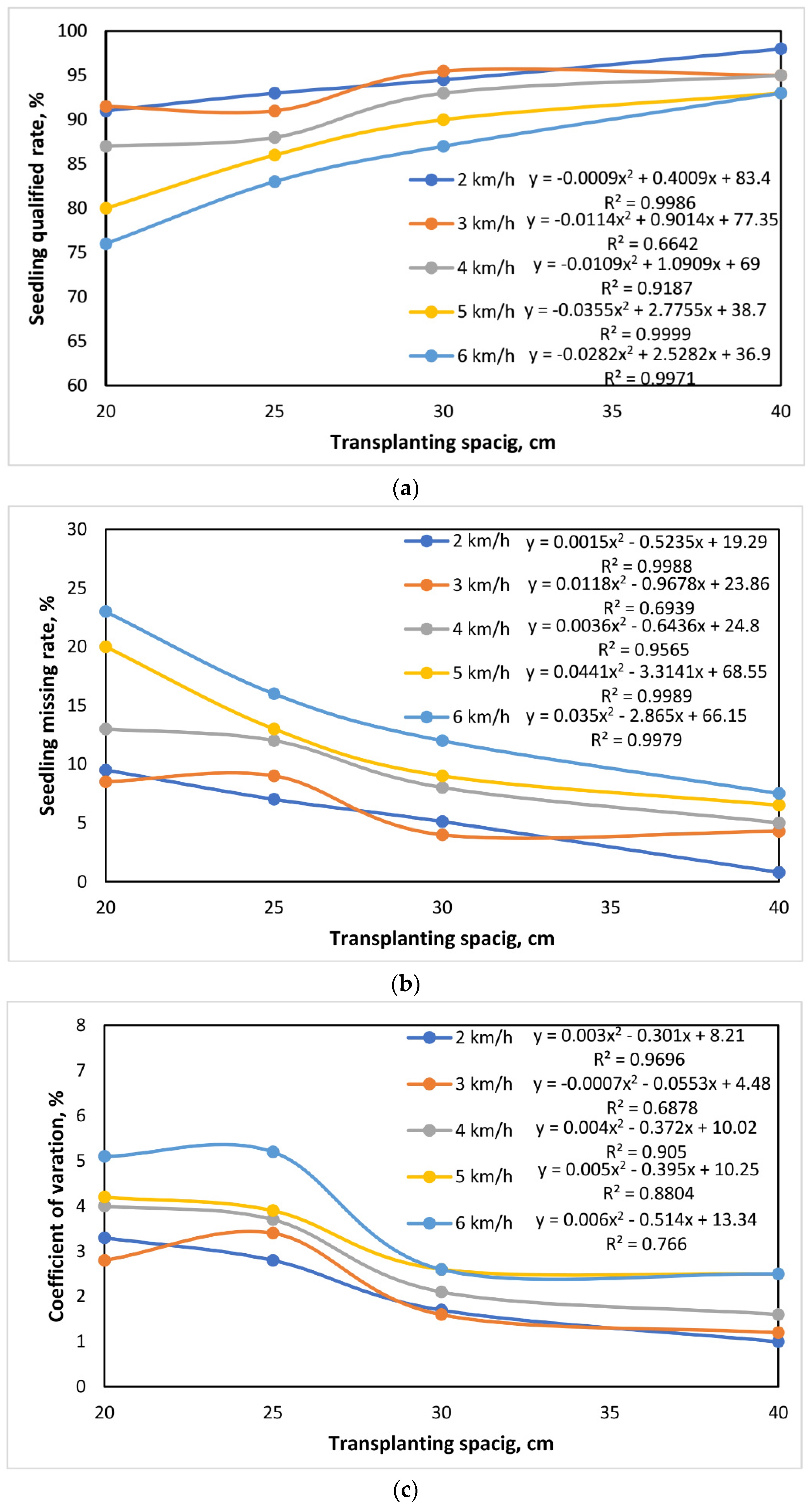
3.3. The Effect of Transplant Spacing on the RSMS Results
4. Conclusions and Future Work
- The speed sensor calibration results showed good performance, indicating perfect agreement between the travel speed and the speed measured by the speed sensor at different forward speeds during the experiment.
- The RSMS results are more affected by a change in travel speed when the transplant spacing is small. The RSMS accuracy of the seedling counter sensor decreased as the travel speed increased.
- When the travel speed is low, the change in transplant spacing has a greater impact on the RSMS outcomes. The RSMS accuracy of the seedling counter sensor decreased as the transplant spacing decreased.
- In conclusion, the obtained results of the current study are of great help to the design and improvement of a cost-effective, smart, and intelligent sugarcane transplanter.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zein El-den, A.M.; Ahmed, S.F.; Hanafy, W.M.; Elwakeel, A.E. Review of some parameters related to the base-cutter of sugarcane harvesters. Misr J. Agric. Eng. 2020, 37, 325–330. [Google Scholar] [CrossRef]
- Elwakeel, A.E.; Ahmed, S.F.; Zein Eldin, A.M.; Hanafy, W.M. A review on sugarcane harvesting technology. Al-Azhar J. Agric. Eng. 2021, 2, 54–63. [Google Scholar] [CrossRef]
- Zein El-den, A.M.; Ahmed, S.F.; Hanafy, W.M.; Elwakeel, A.E. Fabrication and test of a tractor-front-mounted two-row sugarcane harvester. Misr J. Agric. Eng. 2020, 37, 331–344. [Google Scholar] [CrossRef]
- Elwakeel, A.E.; Ahmed, S.F.; Zein Eldin, A.M.; Hanafy, W.M. Design and field testing of a sugarcane cutter. Al-Azhar J. Agric. Eng. 2021, 1, 39–48. [Google Scholar] [CrossRef]
- Elwakeel, A.E.; Zein Eldin, A.M.; Tantawy, A.A.; Mohamed, S.M.A.; Mohamed, H.A.A. Manufacturing and performance evaluation of a sugarcane node cutting machine. J. Soil Sci. Agric. Eng. 2021, 12, 743–748. [Google Scholar] [CrossRef]
- Wang, M.; Liu, Q.; Ou, Y.; Zou, X. Experimental study of the planting uniformity of sugarcane single-bud billet planters. Agriculture 2022, 12, 908. [Google Scholar] [CrossRef]
- Singh, A.K.; Singh, P.R. Development of a tractor operated sugarcane cutter planter for mechanization of sugarcane planting in deep furrows. Sugar Tech 2017, 19, 416–423. [Google Scholar] [CrossRef]
- Staggenborg, S.A.; Taylor, R.K.; Maddux, L.D. Effect of planter speed and seed firmers on corn stand establishment. Appl. Eng. Agric. 2004, 20, 573–580. [Google Scholar] [CrossRef]
- Hossen, M.A.; Talukder, M.R.; Al Mamun, M.R.; Rahaman, H.; Paul, S.; Rahman, M.M.; Miaruddin, M.; Ali, M.A.; Islam, M.N. Mechanization status, promotional activities and government strategies of Thailand and Vietnam in comparison to Bangladesh. AgriEngineering 2020, 2, 489–510. [Google Scholar] [CrossRef]
- Rípoli, M.L.C.; Rípoli, T.C.C.; Casagrandi, D.V.; Ide, B.Y. Evaluation of five sugar cane planters. In Proceedings of the 2007 ASAE Annual Meeting, Moscow, ID, USA, 13–15 September 2017; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2007; p. 1. [Google Scholar]
- Khedkar, M.B.; Kamble, A.K. Evaluation of mechanized planting of sugarcane. Int. J. Agric. Eng. 2008, 1, 136–139. [Google Scholar]
- Tsuga, K. Development of fully automatic vegetable transplanter. Jpn. Agric. Res. Q. 2000, 34, 21–28. [Google Scholar]
- Mazzetto, F.; Calcante, A. Highly automated vine cutting transplanter based on DGNSS-RTK technology integrated with hydraulic devices. Comput. Electron. Agric. 2011, 79, 20–29. [Google Scholar] [CrossRef]
- Zhang, Q.A.; Wei, C.X.; Fan, X.H.; Shi, F.F. Chemical compositions and antioxidant capacity of by-products generated during the apricot kernels processing. CyTA J. Food 2018, 16, 422–428. [Google Scholar] [CrossRef]
- Kumar, P.; Raheman, H. Automatic feeding mechanism of a vegetable transplanter. Int. J. Agric. Biol. Eng. 2012, 5, 20–27. [Google Scholar]
- Shibusawa, S. Precision Farming and Terramechanics. In Proceedings of the Fifth ISTVS Asia-Pacific Regional Conference in Korea, Seoul, Republic of Korea, 20–22 October 1998. [Google Scholar]
- Elwakeel, A.E.; Mazrou, Y.S.A.; Tantawy, A.A.; Okasha, A.M.; Elmetwalli, A.H.; Elsayed, S.; Makhlouf, A.H. Designing, optimizing, and validating a low-cost, multi-purpose, automatic system-based RGB color sensor for sorting fruits. Agriculture 2023, 13, 1824. [Google Scholar] [CrossRef]
- McBratney, A.; Whelan, B.; Ancev, T.; Bouma, J. Future directions of precision agriculture. Precis. Agric. 2005, 6, 7–23. [Google Scholar] [CrossRef]
- Yazgi, A.; Degirmencioglu, A. Measurement of seed spacing uniformity performance of a precision metering unit as function of the number of holes on vacuum plate. Measurement 2014, 56, 128–135. [Google Scholar] [CrossRef]
- Xing, H.; Wang, Z.; Luo, X.; He, S.; Zang, Y. Mechanism modeling and experimental analysis of seed throwing with rice pneumatic seed metering device with adjustable seeding rate. Comput. Electron. Agric. 2020, 178, 105697. [Google Scholar] [CrossRef]
- Karimi, H.; Navid, H.; Besharati, B.; Behfar, H.; Eskandari, I. A practical approach to comparative design of non-contact sensing techniques for seed flow rate detection. Comput. Electron. Agric. 2017, 142, 165–172. [Google Scholar] [CrossRef]
- Karayel, D.; Wiesehoff, M.; Özmerzi, A.; Müller, J. Laboratory measurement of seed drill seed spacing and velocity of fall of seeds using high-speed camera system. Comput. Electron. Agric. 2006, 50, 89–96. [Google Scholar] [CrossRef]
- Cay, A.; Kocabiyik, H.; Karaaslan, B.; May, S.; Khurelbaatar, M. Development of an opto-electronic measurement system for planter laboratory tests. Measurement 2017, 102, 90–95. [Google Scholar] [CrossRef]
- Liang, Z.; Zhang, D.; Yang, L.; Cui, T.; Hao, Y. Experimental study on motor driven pneumatic precision seed-metering device for maize. In Proceedings of the 2015 ASABE Annual International Meeting, New Orleans, LA, USA, 26–29 July 2015; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2015; p. 1. [Google Scholar]
- Miller, E.A.; Rascon, J.; Koller, A.; Porter, W.M.; Taylor, R.K.; Raun, W.R.B.; Kochenower, R. Evaluation of corn seed vacuum metering systems. In Proceedings of the 2012 ASABE Annual International Meeting, Dallas, TX, USA, 29 July–1 August 2012; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2012; p. 1. [Google Scholar]
- Zhan, Z.; Yaoming, L.; Jin, C.; Lizhang, X. Numerical analysis and laboratory testing of seed spacing uniformity performance for vacuum-cylinder precision seeder. Biosyst. Eng. 2010, 106, 344–351. [Google Scholar] [CrossRef]
- Pérez-Ruiz, M.; Slaughter, D.C. Development of a precision 3-row synchronised transplanter. Biosyst. Eng. 2021, 206, 67–78. [Google Scholar] [CrossRef]
- Barbieri, P.; Echarte, L.; Della, M.A.; Sadras, V.O.; Echeverria, H.; Andrade, F.H. Maize evapotranspiration and water-use efficiency in response to row spacing. Agron. J. 2012, 104, 939–944. [Google Scholar] [CrossRef]
- Doerge, T.; Hall, T.; Gardner, D. New research confirms benefits of improved plant spacing in corn. Crop Insights 2002, 12, 1–5. [Google Scholar]
- Morente, A.B.; Elorza, P.B.; Díaz-Ambrona, C.G.H.; Da Costa, G.D.; Griepentrog, H.W. Even-sowing pattern strategies for a low-input organic system in forage maize. Agric. Eng. Int. CIGR J. 2013, 15, 171–179. [Google Scholar]
- Perez-Ruiz, M.; Slaughter, D.C.; Gliever, C.; Upadhyaya, S.K. Tractor-based Real-time Kinematic-Global Positioning System (RTK-GPS) guidance system for geospatial mapping of row crop transplant. Biosyst. Eng. 2012, 111, 64–71. [Google Scholar] [CrossRef]
- Samborski, S.M.; Gozdowski, D.; Stępień, M.; Walsh, O.S.; Leszczyńska, E. On-farm evaluation of an active optical sensor performance for variable nitrogen application in winter wheat. Eur. J. Agron. 2016, 74, 56–67. [Google Scholar] [CrossRef]
- Duncan, W.G. A Theory to explain the relationship between corn population and grain yield. Crop Sci. 1984, 24, 1141–1145. [Google Scholar] [CrossRef]
- Lowenberg-DeBoer, J. Economics of variable rate planting for corn. In Proceedings of the Proceedings of the Fourth International Conference on Precision Agriculture, St. Paul, MN, USA, 19–22 July 1999; Wiley Online Library: Hoboken, NJ, USA, 1999; pp. 1643–1651. [Google Scholar]
- Razavi, J.; Namjoo, M. Determination of forward speed effect on planting uniformity in a sugarcane billet planter. In Proceedings of the XVIIth World Congress of the International Commission of Agricultural and Biosystems Engineering (CIGR) Paper No CSBE001142, Quebec City, QC, Canada, 13–17 June 2010. [Google Scholar]
- Taghinezhad, J.; Alimardani, R.; Jafari, A. Optimization cane traction output from hopper in full-automatic sugarcane planters by using response surface modeling and analytical hierarchy process. Agric. Eng. Int. CIGR J. 2013, 15, 138–147. [Google Scholar]
- Saengprachatanarug, K.; Wongpichet, S.; Ueno, M.; Taira, E. Comparative discharge and precision index of a sugar cane billet planter. Appl. Eng. Agric. 2016, 32, 561–567. [Google Scholar]
- Saengprachatanarug, K.; Chaloemthoi, C.; Kamwilaisak, K.; Kasemsiri, P.; Chaun-Udom, S.; Taira, E. Effect of metering device arrangement to discharge consistency of sugarcane billet planter. Eng. Agric. Environ. Food 2018, 11, 139–144. [Google Scholar] [CrossRef]
- Namjoo, M.; Razavi, J.; Khani, A. Fabrication and evaluation of a metering device for a sugarcane billet planter. Yuz. Yil Univ. J. Agric. Sci. 2015, 25, 1–12. [Google Scholar]
- Liye, Z.; Jian, X. Study on optoelectronic sensor for performance detection of a seedmeter. Trans. Chin. Soc. Agric. Mach. 2005, 36, 41–43. [Google Scholar]
- Chen, J.; Bian, J.; Li, Y.; Zhao, Z.; Wang, J. Performance detection experiment of precision seed metering device based on high-speed camera system. Trans. Chin. Soc. Agric. Eng. 2009, 25, 90–95. [Google Scholar]
- Li, M.; Ding, Y.; Liao, Q. Loss sowing detection in field of pneumatic precision metering device for rapeseed. Trans. Chin. Soc. Agric. Eng. 2010, 26, 27–31. [Google Scholar]
- GB/T 6973-2005; Standardization Administration of the PR China and General Administration of Quality Supervision, Inspection and Quarantine of the PR China. Testing Methods of Single Seed Drills (Precision Drills). Standard C.N.: Beijing, China, 2005.
- Xie, C.; Zhang, D.; Yang, L.; Cui, T.; Zhong, X.; Li, Y.; Ding, Y.; Ding, Z. Remote monitoring system for maize seeding parameters based on android and wireless communication. Int. J. Agric. Biol. Eng. 2020, 13, 159–165. [Google Scholar] [CrossRef]
- Raheman, H.; Kumar, R. An embedded system for detecting seed flow in the delivery tube of a seed drill. In Proceedings of the International Conference on Advances in Chemical, Biological & Environmental Engineering (ACBEE), Singapore, 29–30 March 2015; pp. 236–241. [Google Scholar]
- Al-Mallahi, A.A.; Kataoka, T. Application of fibre sensor in grain drill to estimate seed flow under field operational conditions. Comput. Electron. Agric. 2016, 121, 412–419. [Google Scholar] [CrossRef]
- Navid, H.; Ebrahimian, S.; Gassemzadeh, H.R.; Mousavi, N.M.J. Laboratory evaluation of seed metering device using image processing method. Aust. J. Agric. Eng. 2011, 2, 1–4. [Google Scholar]
- Wang, C.P.; He, R.Y. Performance detection of precision seed-metering device based on single chip microprocessor. Sci. Technol. Eng. 2011, 11, 299–302. [Google Scholar]
- Li, Y.; He, X.; Tao, C.; Zhang, D.X.; Song, S.; Rui, Z.; Wang, M. Development of mechatronic driving system for seed meters equipped on conventional precision corn planter. Int. J. Agric. Biol. Eng. 2015, 8, 1–9. [Google Scholar]
- Xie, C.; Zhang, D.; Yang, L.; Cui, T.; Yu, T.; Wang, D.; Xiao, T. Experimental analysis on the variation law of sensor monitoring accuracy under different seeding speed and seeding spacing. Comput. Electron. Agric. 2021, 189, 106369. [Google Scholar] [CrossRef]
- Tang, H.; Xu, C.; Wang, Z.; Wang, Q.; Wang, J. Optimized design, monitoring system development and experiment for a long-belt finger-clip precision corn seed metering Device. Front. Plant Sci. 2022, 13, 814747. [Google Scholar] [CrossRef] [PubMed]
- Malone, B.P.; Styc, Q.; Minasny, B.; McBratney, A.B. Digital soil mapping of soil carbon at the farm scale: A spatial downscaling approach in consideration of measured and uncertain data. Geoderma 2017, 290, 91–99. [Google Scholar] [CrossRef]
- Liu, W.; Hu, J.; Zhao, X.; Pan, H.; Lakhiar, I.A.; Wang, W. Development and experimental analysis of an intelligent sensor for monitoring seed flow rate based on a seed flow reconstruction technique. Comput. Electron. Agric. 2019, 164, 104899. [Google Scholar] [CrossRef]
- Che, Y.; Wei, L.G.; Liu, X.T.; Li, Z.L.; Wang, F.Z. Design and experiment of seeding quality infrared monitoring system for no-tillage seeder. Trans. Chin. Soc. Agric. Eng. 2017, 33, 11–16. (In Chinese) [Google Scholar]
- Cay, A.; Kocabiyik, H.; May, S. Development of an electro-mechanic control system for seed-metering unit of single seed corn planters Part I: Design and laboratory simulation. Comput. Electron. Agric. 2018, 144, 71–79. [Google Scholar] [CrossRef]
- Cay, A.; Kocabiyik, H.; May, S. Development of an electro-mechanic control system for seed-metering unit of single seed corn planters Part II: Field performance. Comput. Electron. Agric. 2018, 145, 11–17. [Google Scholar] [CrossRef]
- Wu, N.; Lin, J.; Li, B.F.; Zhou, Y.M. Design and test on performance monitoring system of no-tillage planter seed-metering device. Trans. Chin. Soc. Agric. Mach. 2016, 47, 69–75. (In Chinese) [Google Scholar]
- Yang, S.; Wang, X.; Gao, Y.Y.; Zhao, X.G.; Dou, H.J.; Zhao, C.J. Design and experiment of motor driving bus control system for corn vacuum seed meter. Trans. Chin. Soc. Agric. Mach. 2019, 50, 57–67. (In Chinese) [Google Scholar]
- Karimi, H.; Navid, H.; Besharati, B.; Eskandari, I. Assessing an infrared-based seed drill monitoring system under feld operating conditions. Comput. Electron. Agric. 2019, 162, 543–551. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Speed Level | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Travel speed (km/h) | 2 | 3 | 4 | 5 | 6 |
| Transplant spacing (cm) | 20 | 25 | 30 | 40 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elwakeel, A.E.; Mazrou, Y.S.A.; Eissa, A.S.; Okasha, A.M.; Elmetwalli, A.H.; Makhlouf, A.H.; Metwally, K.A.; Mahmoud, W.A.; Elsayed, S. Design and Validation of a Variable-Rate Control Metering Mechanism and Smart Monitoring System for a High-Precision Sugarcane Transplanter. Agriculture 2023, 13, 2218. https://doi.org/10.3390/agriculture13122218
Elwakeel AE, Mazrou YSA, Eissa AS, Okasha AM, Elmetwalli AH, Makhlouf AH, Metwally KA, Mahmoud WA, Elsayed S. Design and Validation of a Variable-Rate Control Metering Mechanism and Smart Monitoring System for a High-Precision Sugarcane Transplanter. Agriculture. 2023; 13(12):2218. https://doi.org/10.3390/agriculture13122218
Chicago/Turabian StyleElwakeel, Abdallah E., Yasser S. A. Mazrou, Ahmed S. Eissa, Abdelaziz M. Okasha, Adel H. Elmetwalli, Abeer H. Makhlouf, Khaled A. Metwally, Wael A. Mahmoud, and Salah Elsayed. 2023. "Design and Validation of a Variable-Rate Control Metering Mechanism and Smart Monitoring System for a High-Precision Sugarcane Transplanter" Agriculture 13, no. 12: 2218. https://doi.org/10.3390/agriculture13122218