
Research on the Identification of Nonlinear Wheel–Rail Adhesion Characteristics Model Parameters in Electric Traction System Based on the Improved TLBO Algorithm
 ,
,  ,
,  and
and
Abstract
:1. Introduction
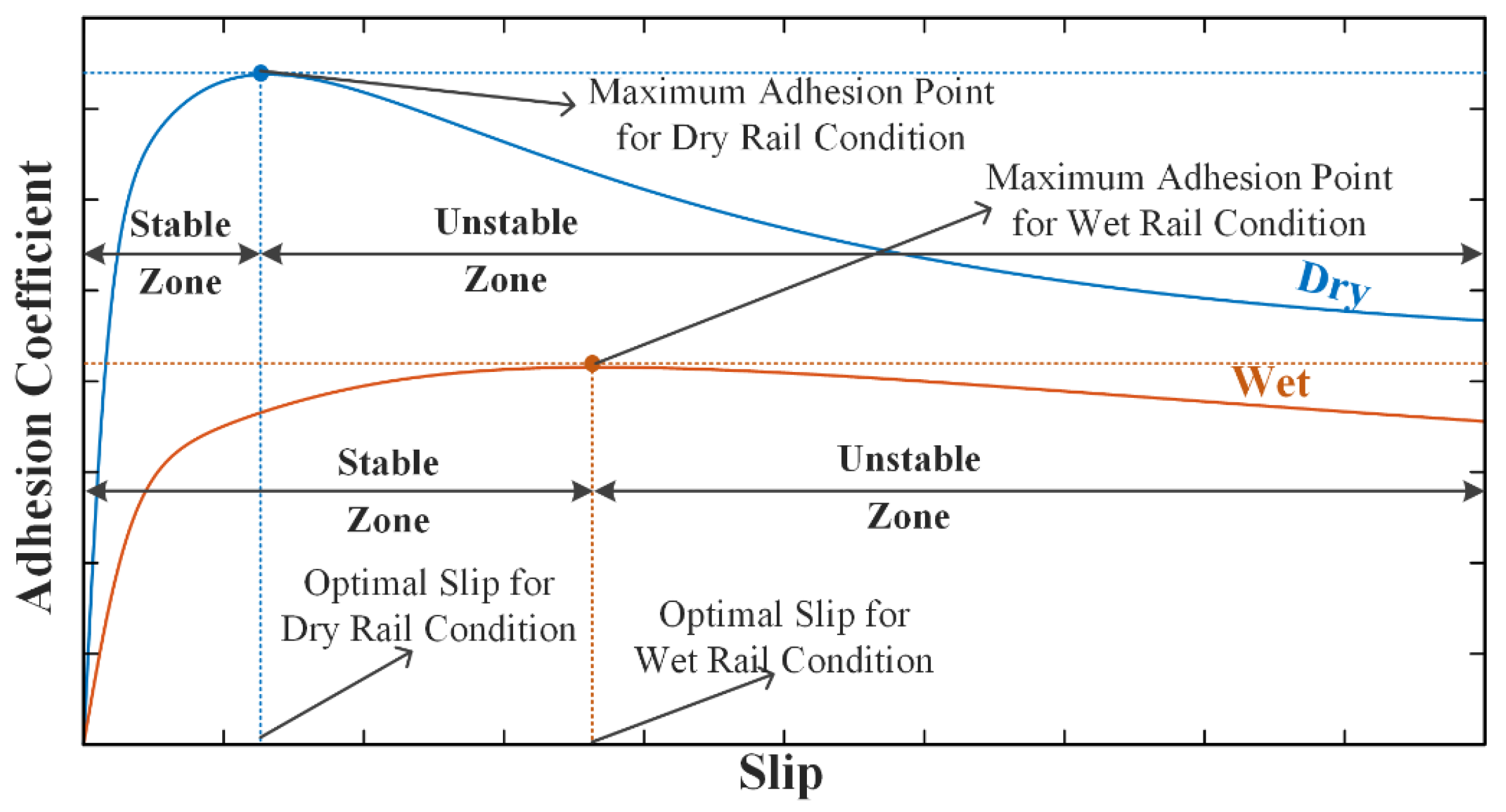
2. Nonlinear Model of Wheel–Rail Adhesion Characteristics
3. Wheel–Rail Adhesion Characteristics Model Parameters Identification Approach
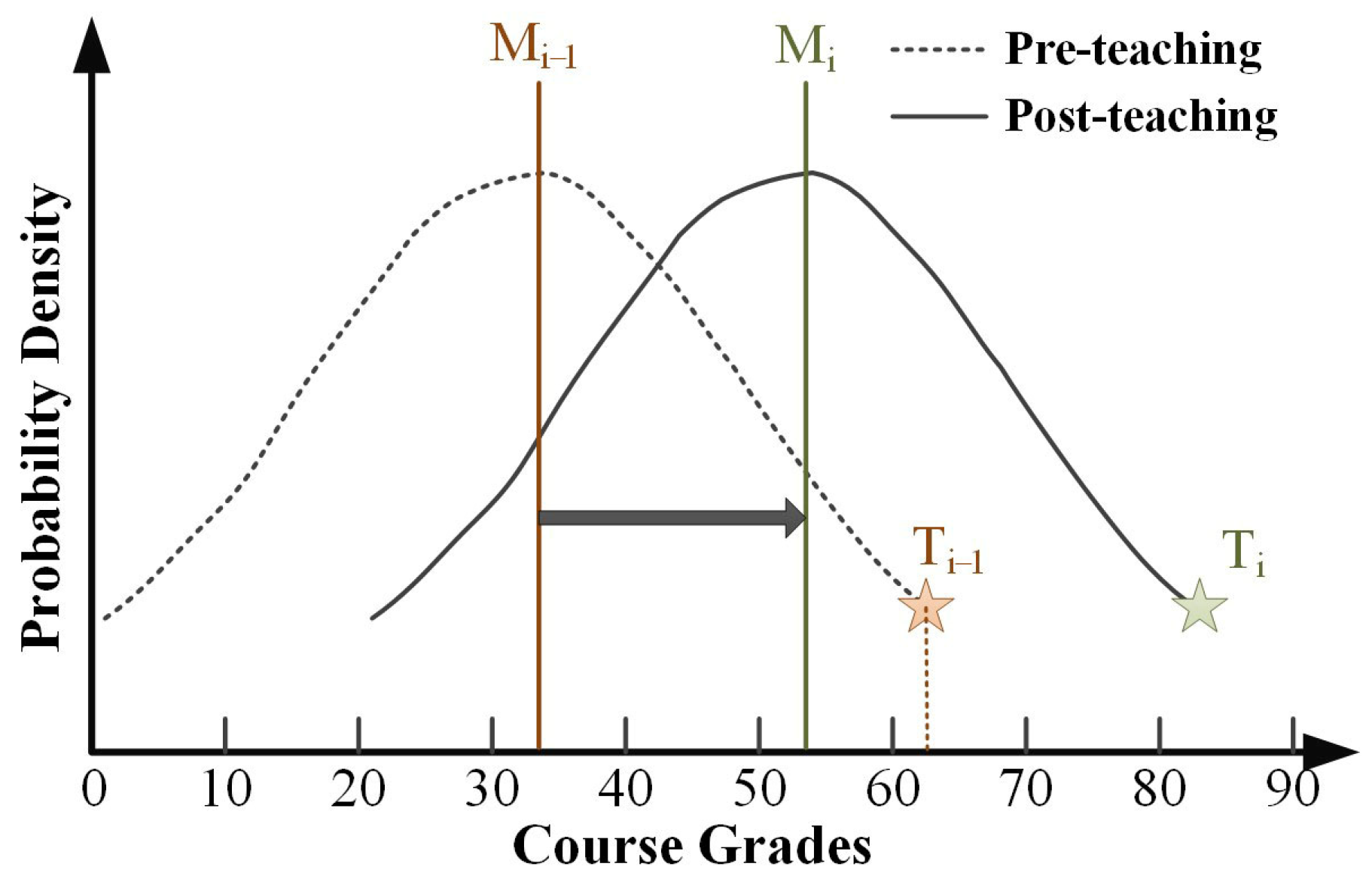
3.1. Teaching-Learning-Based Optimization Methodology
3.1.1. Teacher Phase
3.1.2. Learner Phase
3.2. An Improved TLBO Algorithm for Wheel–Rail Adhesion Characteristic Identification
3.3. Design of the Fitness Function for Identification
3.4. Model-Based Engineering Identification Method for Wheel–Rail Adhesion Characteristics
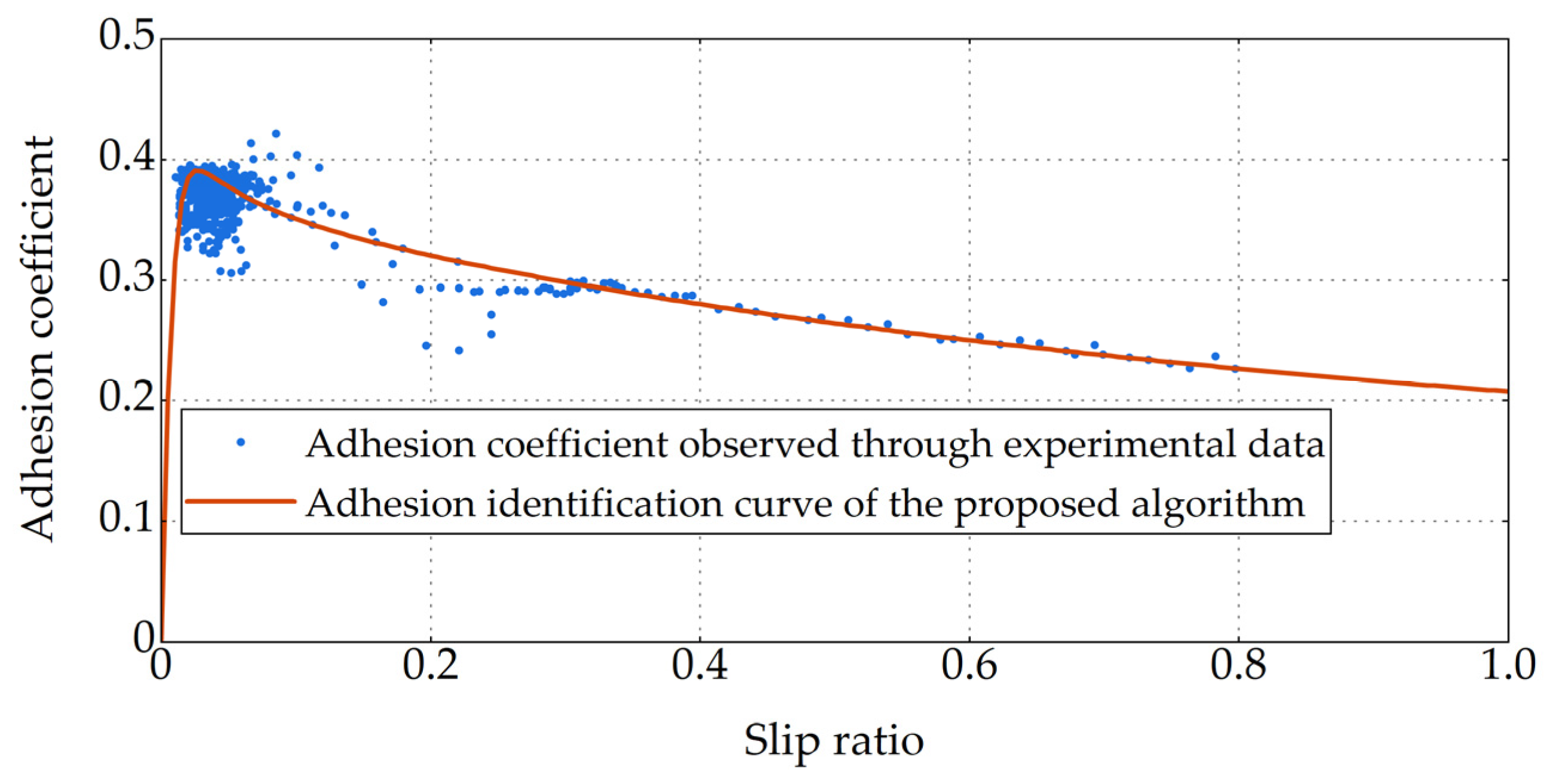
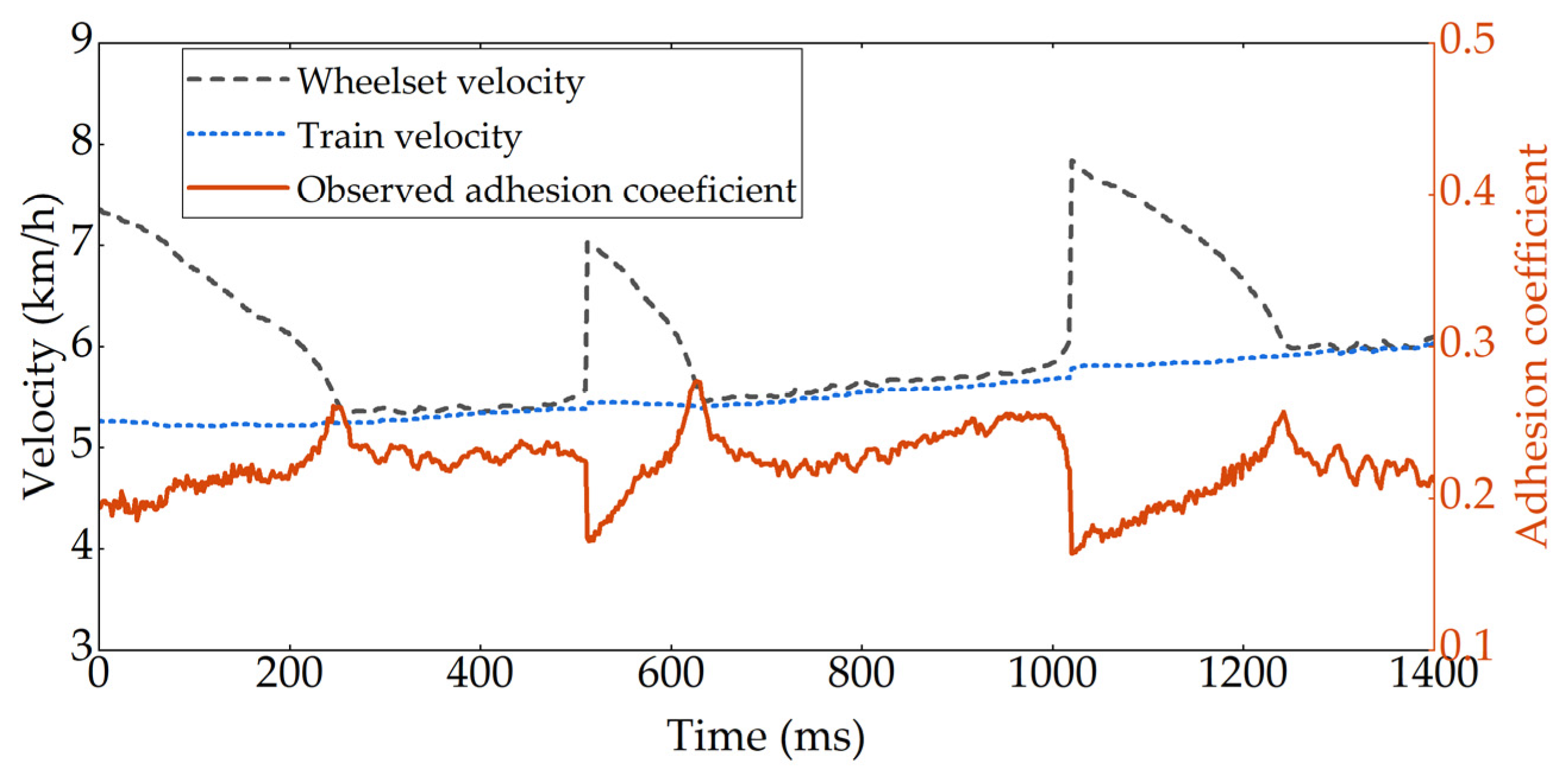
4. Algorithm Verification and Results Discussion
4.1. Experimental Design for Algorithm Verification
4.2. Results Discussion and Performance Comparison
4.2.1. Scenario 1: Dry Rail
4.2.2. Scenario 2: Wet Rail without Sanding
4.2.3. Scenario 3: Wet Rail with Sanding
4.2.4. Comparison of Time Consuming
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hoen, K.M.; Tan, T.; Fransoo, J.C.; van Houtum, G.-J. Switching transport modes to meet voluntary carbon emission targets. Transp. Sci. 2014, 48, 592–608. [Google Scholar] [CrossRef]
- Kampczyk, A.; Gamon, W.; Gawlak, K. Implementation of non-contact temperature distribution monitoring solutions for railway vehicles in a sustainability development system transport. Sensors 2022, 22, 9624. [Google Scholar] [CrossRef] [PubMed]
- Olaby, O.; Hamadache, M.; Soper, D.; Winship, P.; Dixon, R. Development of a novel railway positioning system using RFID technology. Sensors 2022, 22, 2401. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Zhang, H.; Wang, H.; Liu, Q.; Zhu, M. Study on the adhesion behavior of wheel/rail under oil, water and sanding conditions. Wear 2011, 271, 2693–2698. [Google Scholar] [CrossRef]
- Arias-Cuevas, O. Low Adhesion in the Wheel-Rail Contact; Delft University of Technology: Delft, Netherlands, 2010. [Google Scholar]
- Pichlík, P. Strategy of Railway Traction Vehicles Wheel Slip Control; Czech Technical University in Prague: Prague, Czech Republic, 2018. [Google Scholar]
- Hwang, D.-H.; Kim, M.-S.; Park, D.-Y.; Kim, Y.-J.; Kim, D.-H. Re-adhesion control for high-speed electric railway with parallel motor control system. In Proceedings of the 2001 IEEE International Symposium on Industrial Electronics Proceedings, Pusan, Republic of Korea, 12–16 June 2001; pp. 1124–1129. [Google Scholar]
- Wu, G.; Shen, L.; Yao, Y. Investigating the re-adhesion performance of locomotives with bogie frame suspension driving system. Int. J. Rail Transp. 2023, 11, 267–288. [Google Scholar] [CrossRef]
- Pichlík, P.; Bauer, J. Adhesion characteristic slope estimation for wheel slip control purpose based on UKF. IEEE Trans. Veh. Technol. 2021, 70, 4303–4311. [Google Scholar] [CrossRef]
- Moaveni, B.; Fathabadi, F.R.; Molavi, A. Supervisory predictive control for wheel slip prevention and tracking of desired speed profile in electric trains. ISA Trans. 2020, 101, 102–115. [Google Scholar] [CrossRef] [PubMed]
- Pichlík, P.; Zděnek, J. Overview of slip control methods used in locomotives. Trans. Electr. Eng. 2014, 3, 38–43. [Google Scholar]
- Zirek, I.A. Anti-Slip Control of Traction Motor of Rail Vehicles; University of Pardubice: Pardubice, Czech Republic, 2019. [Google Scholar]
- Shrestha, S.; Wu, Q.; Spiryagin, M. Review of adhesion estimation approaches for rail vehicles. Int. J. Rail Transp. 2019, 7, 79–102. [Google Scholar] [CrossRef]
- Iannuzzi, D.; Rizzo, R. Disturbance observer for dynamic estimation of friction force in railway traction systems. In Proceedings of the 29th Annual Conference of the IEEE Industrial Electronics Society, Roanoke, VA, USA, 2–6 November 2003; pp. 2979–2982. [Google Scholar]
- Malvezzi, M.; Pugi, L.; Papini, S.; Rindi, A.; Toni, P. Identification of a wheel–rail adhesion coefficient from experimental data during braking tests. Proc. Inst. Mech. Eng. F J. Rail Rapid Transit 2013, 227, 128–139. [Google Scholar] [CrossRef]
- Liu, J.; Liu, L.; He, J.; Zhang, C.; Zhao, K. Wheel/rail adhesion state identification of heavy-haul locomotive based on particle swarm optimization and kernel extreme learning machine. J. Adv. Transp. 2020, 2020, 8136939. [Google Scholar] [CrossRef]
- Onat, A.; Voltr, P. Swarm intelligence based multiple model approach for friction estimation at wheel-rail interface. In Proceedings of the 5th International Symposium on Engineering, Artificial Intelligence and Applications, Kyrenia, Cyprus, 1–3 November 2017; pp. 187–194. [Google Scholar]
- Zirek, A.; Onat, A. A novel anti-slip control approach for railway vehicles with traction based on adhesion estimation with swarm intelligence. Railw. Eng. Sci. 2020, 28, 346–364. [Google Scholar] [CrossRef]
- Spiryagin, M.; Polach, O.; Cole, C. Creep force modelling for rail traction vehicles based on the Fastsim algorithm. Veh. Syst. Dyn. 2013, 51, 1765–1783. [Google Scholar] [CrossRef]
- Onat, A.; Voltr, P. Velocity measurement-based friction estimation for railway vehicles running on adhesion limit: Swarm intelligence-based multiple models approach. J. Intell. Transp. Syst. 2020, 24, 93–107. [Google Scholar] [CrossRef]
- Strano, S.; Terzo, M. On the real-time estimation of the wheel-rail contact force by means of a new nonlinear estimator design model. Mech. Syst. Signal Process. 2018, 105, 391–403. [Google Scholar] [CrossRef]
- Kaiser, I.; Strano, S.; Terzo, M.; Tordela, C. Estimation of the railway equivalent conicity under different contact adhesion levels and with no wheelset sensorization. Veh. Syst. Dyn. 2023, 6, 19–37. [Google Scholar] [CrossRef]
- Havangi, R.; Moradi, M. PSO based EKF wheel-rail adhesion estimation. Int. J. Ind. Electron. Control Optim. 2023, 6, 49–62. [Google Scholar]
- Meacci, M.; Icon, Z.; Butini, E.; Marini, L.; Meli, E.; Rindi, A. A railway local degraded adhesion model including variable friction, energy dissipation and adhesion recovery. Veh. Syst. Dyn. 2021, 59, 1697–1718. [Google Scholar] [CrossRef]
- Zhang, B.; Nadimi, S.; Lewis, R. Modelling the adhesion enhancement induced by sand particle breakage at the wheel-rail interface. Wear 2024, 538, 205232. [Google Scholar] [CrossRef]
- Wu, B.; Yang, Y.; Xiao, G. A transient three-dimensional wheel-rail adhesion model under wet condition considering starvation and surface roughness. Wear 2024, 540, 205263. [Google Scholar] [CrossRef]
- Chen, H.; Furuya, T.; Fukagai, S.; Saga, S.; Ikoma, J.; Kimura, K.; Suzumura, J. Wheel slip/Slide and low adhesion caused by fallen leaves. Wear 2020, 15, 203187. [Google Scholar] [CrossRef]
- Wu, B.; Xiao, G.; An, B.; Wu, T.; Shen, Q. Numerical study of wheel/rail dynamic interactions for high-speed rail vehicles under low adhesion conditions during traction. Eng. Fail. Anal. 2022, 137, 106266. [Google Scholar] [CrossRef]
- Pichlík, P.; Bauer, J. Analysis of the locomotive wheel slip controller operation during low velocity. IEEE trans. Intell. Transp. Syst. 2021, 22, 1543–1552. [Google Scholar] [CrossRef]
- Polach, O. Creep forces in simulations of traction vehicles running on adhesion limit. Wear 2005, 258, 992–1000. [Google Scholar] [CrossRef]
- Trummer, G.; Buckley-Johnstone, L.; Voltr, P.; Meierhofer, A.; Lewis, R.; Six, K. Wheel-rail creep force model for predicting water induced low adhesion phenomena. Tribol. Int. 2017, 109, 409–415. [Google Scholar] [CrossRef]
- Zhu, W.; Zheng, S.; Wu, N. An improved degraded adhesion model for wheel-rail under braking conditions. Ind. Lubr. Tribol. 2021, 73, 450–456. [Google Scholar] [CrossRef]
- An, B.; Wang, P.; Xu, Y.; Xu, J.; Chen, R. Study on Wheel/rail Creep Curve Based on POLACH’s Method. J. Mech. Eng. 2018, 54, 124–131. [Google Scholar] [CrossRef]
- Wu, G.; Shen, L.; Yao, Y.; Song, W.; Huang, J. Determination of the dynamic characteristics of locomotive drive systems under re-adhesion conditions using wheel slip controller. Zhejiang Univ. Sci. 2023, 24, 722–734. [Google Scholar] [CrossRef]
- Yang, Y.; Ling, L.; Zhang, T.; Wang, K. An advanced antislip control algorithm for locomotives under complex friction conditions. J. Comput. Nonlinear Dyn. 2021, 16, 101004. [Google Scholar] [CrossRef]
- Chen, P.; Zhu, W.; Yu, C.; Sun, N.; Xue, W. Research on train braking model by improved Polach model considering wheel-rail adhesion characteristics. IET Intell. Transp. Syst. 2023, 17, 2432–2443. [Google Scholar] [CrossRef]
- Rao, R.V.; Savsani, V.J.; Vakharia, D. Teaching-learning-based optimization: A novel method for constrained mechanical design optimization problems. Comput. Aided Des. 2011, 43, 303–315. [Google Scholar] [CrossRef]
- Zhou, G.; Zhou, Y.; Deng, W.; Yin, S.; Zhang, Y. Advances in teaching-learning-based optimization algorithm: A comprehensive survey. Neurocomputing 2023, 561, 126898. [Google Scholar] [CrossRef]
- Gómez Díaz, K.Y.; De León Aldaco, S.E.; Aguayo Alquicira, J.; Ponce-Silva, M.; Olivares Peregrino, V.H. Teaching–learning-based optimization algorithm applied in electronic engineering: A survey. Electronics 2022, 11, 3451. [Google Scholar] [CrossRef]
- Xue, R.; Wu, Z. A survey of application and classification on teaching-learning-based optimization algorithm. IEEE Access 2019, 8, 1062–1079. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Supply power | AC 25 kV/50 Hz and DC 3000 V | Maximum operating speed | 100 km/m |
| Axle arrangement | C0-C0 | Maximum test speed | 110 km/h |
| Rail gauge | 1065 mm | Continuous speed | 40 km/m |
| Total weight | 129 t | Starting traction force | 480 kN |
| Axle load | 21.5 t | Continuous traction force | 405 kN |
| Wheel diameter | 1220 mm (new) 1180 mm (Semi wear) 1140 mm (Wear) | Maximum braking force | 300 kN |
| Continuous output power | 4500 kW | Transmission ratio | 6.0588 |
| Operating Conditions | Dry Rail | Wet Rail without Sanding | Wet Rail with Sanding | |||||
|---|---|---|---|---|---|---|---|---|
| Algorithm | PSO | TLBO | Proposed Algorithm | TLBO | Proposed Algorithm | TLBO | Proposed Algorithm | |
| Error | 0.0117 | 0.0114 | 0.0108 | 0.01193 | 0.01194 | 0.01188 | 0.0180 | 0.0167 |
| Iterations | 890 | 724 | 31 | 981 | 28 | 421 | 958 | 44 |
| Time(s) | 1469 | 884 | 50 | 1197 | 45 | 695 | 1169 | 70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gan, W.; Zhao, X.; Wei, D.; Bai, Z.; Ding, R.; Liu, K.; Li, X. Research on the Identification of Nonlinear Wheel–Rail Adhesion Characteristics Model Parameters in Electric Traction System Based on the Improved TLBO Algorithm. Electronics 2024, 13, 1789. https://doi.org/10.3390/electronics13091789
Gan W, Zhao X, Wei D, Bai Z, Ding R, Liu K, Li X. Research on the Identification of Nonlinear Wheel–Rail Adhesion Characteristics Model Parameters in Electric Traction System Based on the Improved TLBO Algorithm. Electronics. 2024; 13(9):1789. https://doi.org/10.3390/electronics13091789
Chicago/Turabian StyleGan, Weiwei, Xufeng Zhao, Dong Wei, Zhonghao Bai, Rongjun Ding, Kan Liu, and Xueming Li. 2024. "Research on the Identification of Nonlinear Wheel–Rail Adhesion Characteristics Model Parameters in Electric Traction System Based on the Improved TLBO Algorithm" Electronics 13, no. 9: 1789. https://doi.org/10.3390/electronics13091789