The Influence of Shape on Parallel Self-Assembly

Abstract
:
1. Introduction
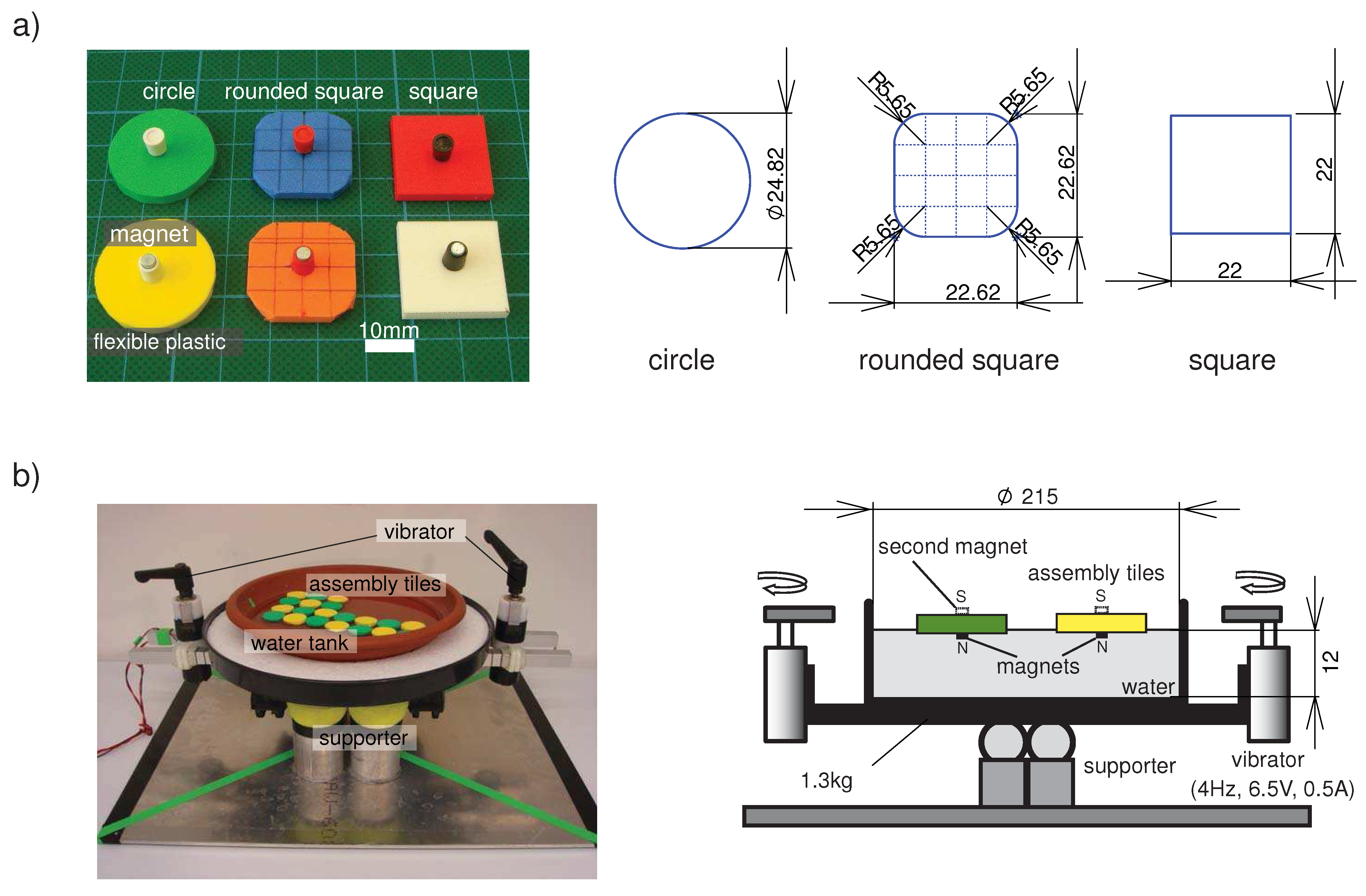
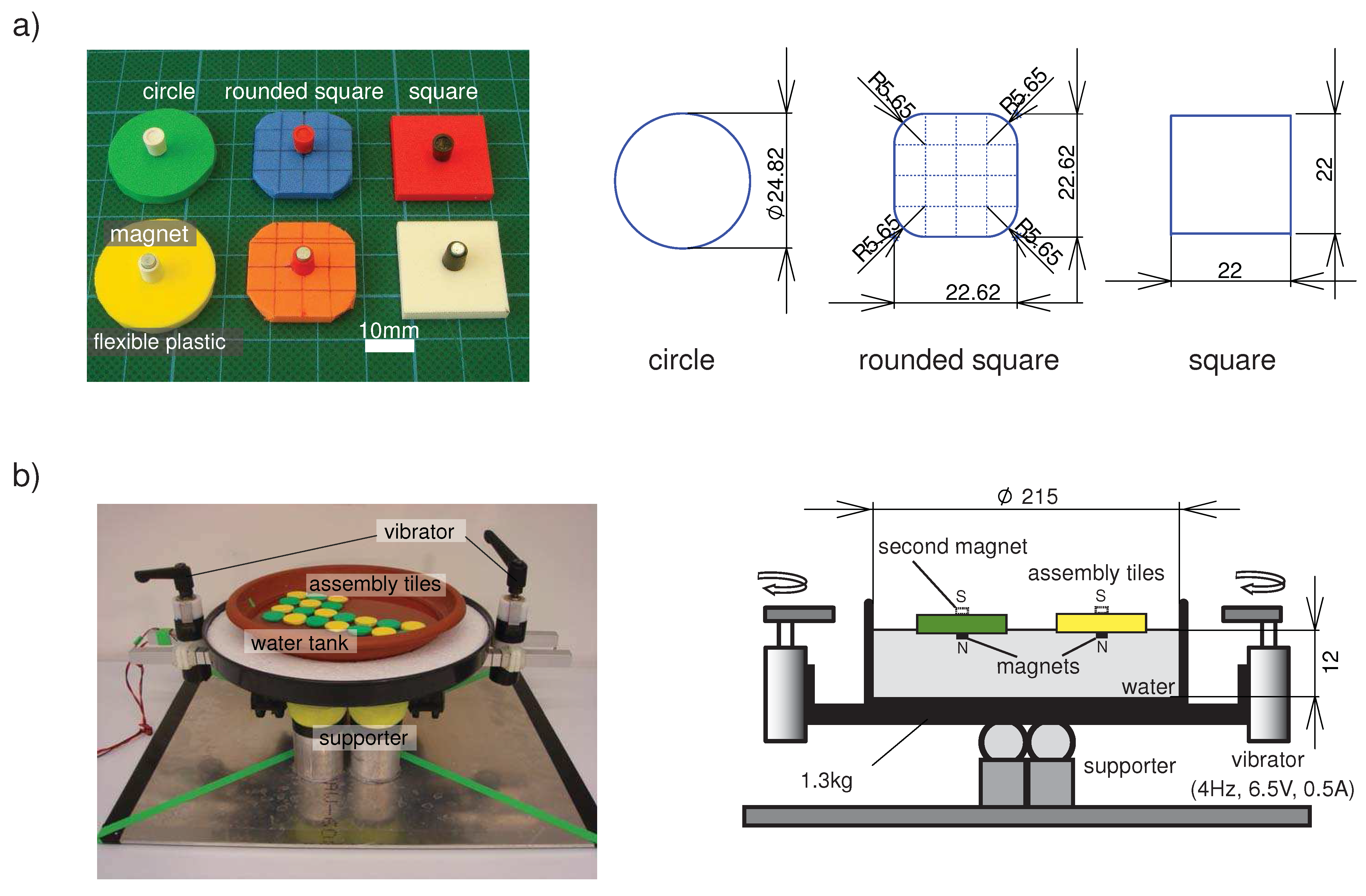
2. The Experimental Self-Assembly Platform
3. Interaction Mechanisms and Measures of the System
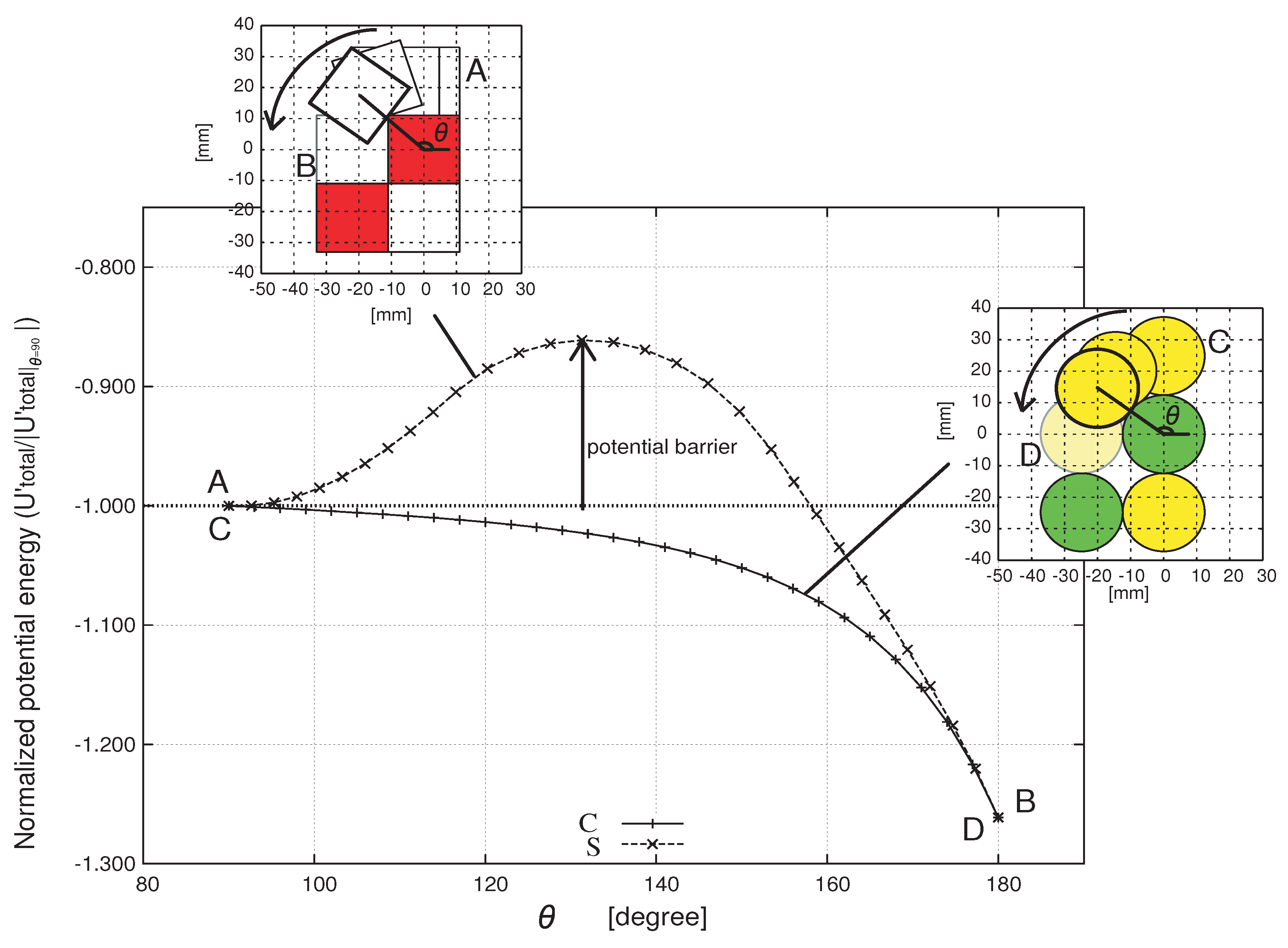
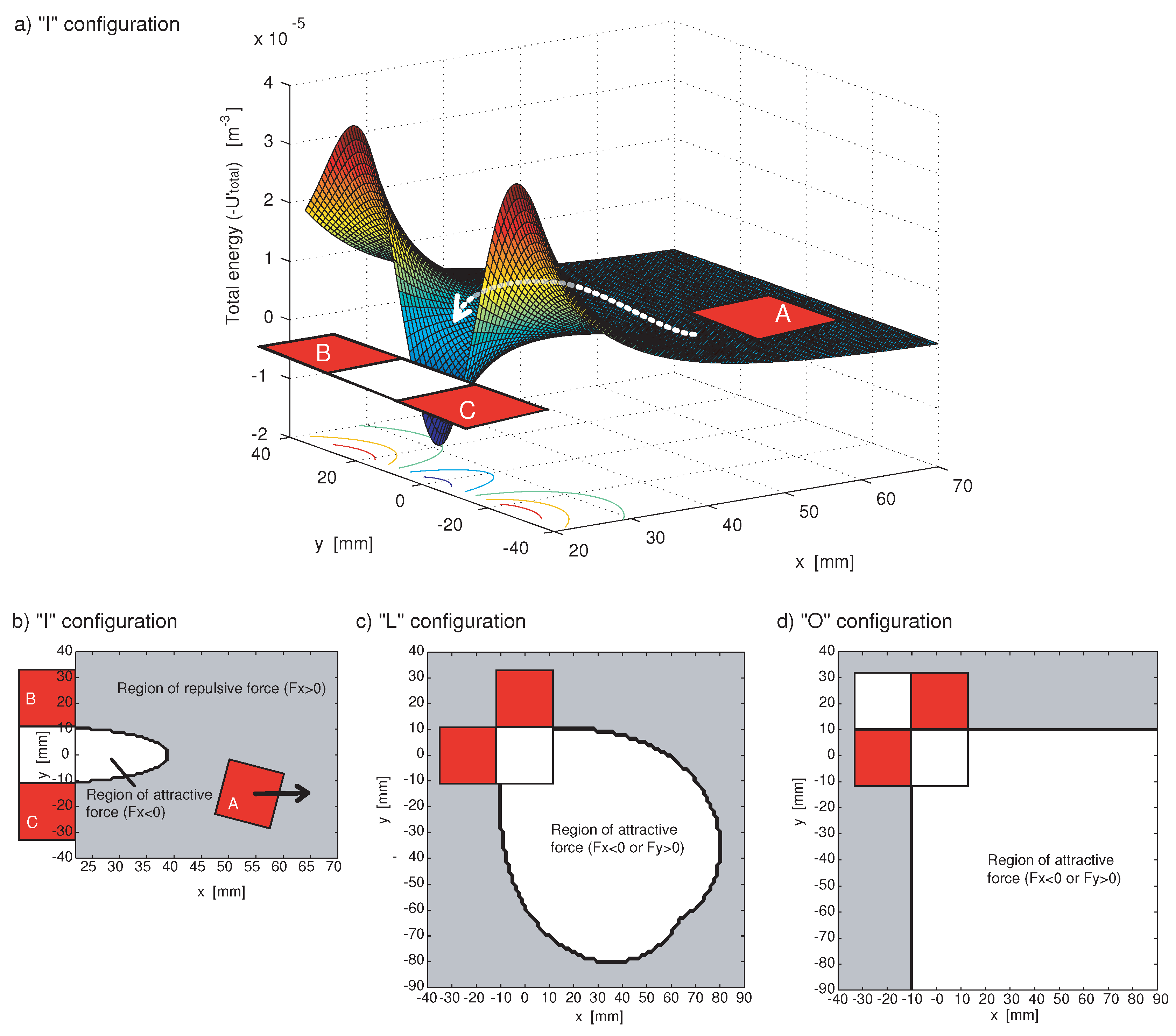
3.1. Magnetic potential energy
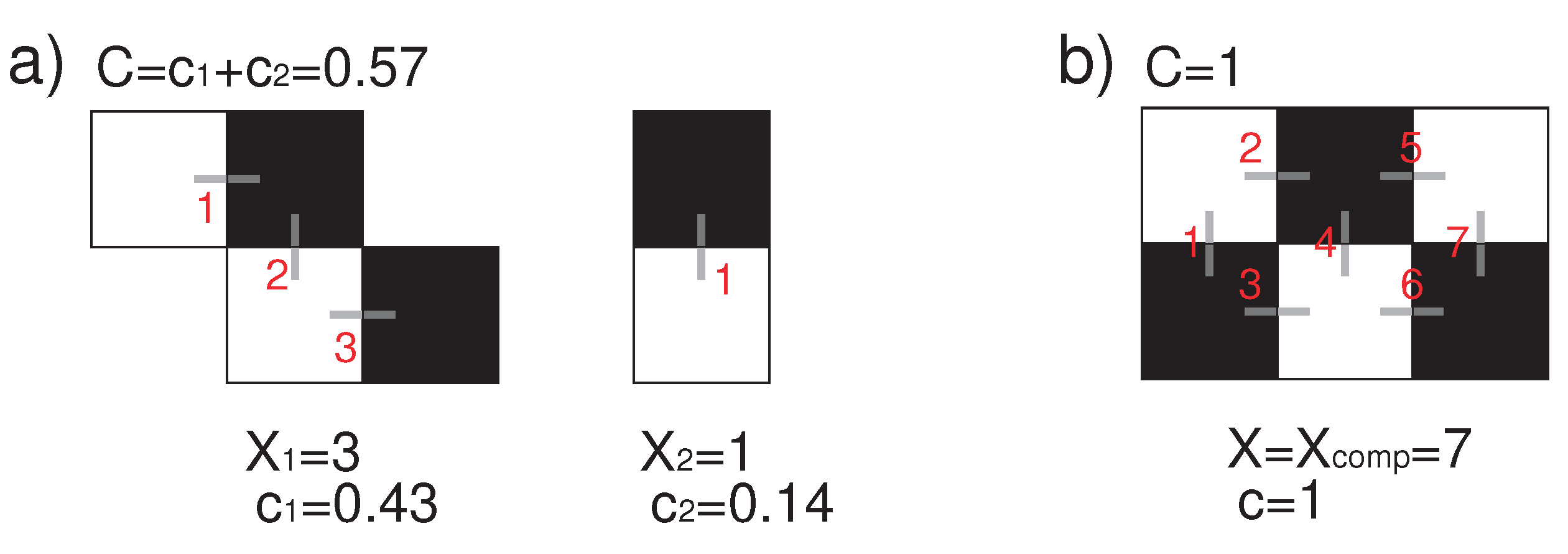
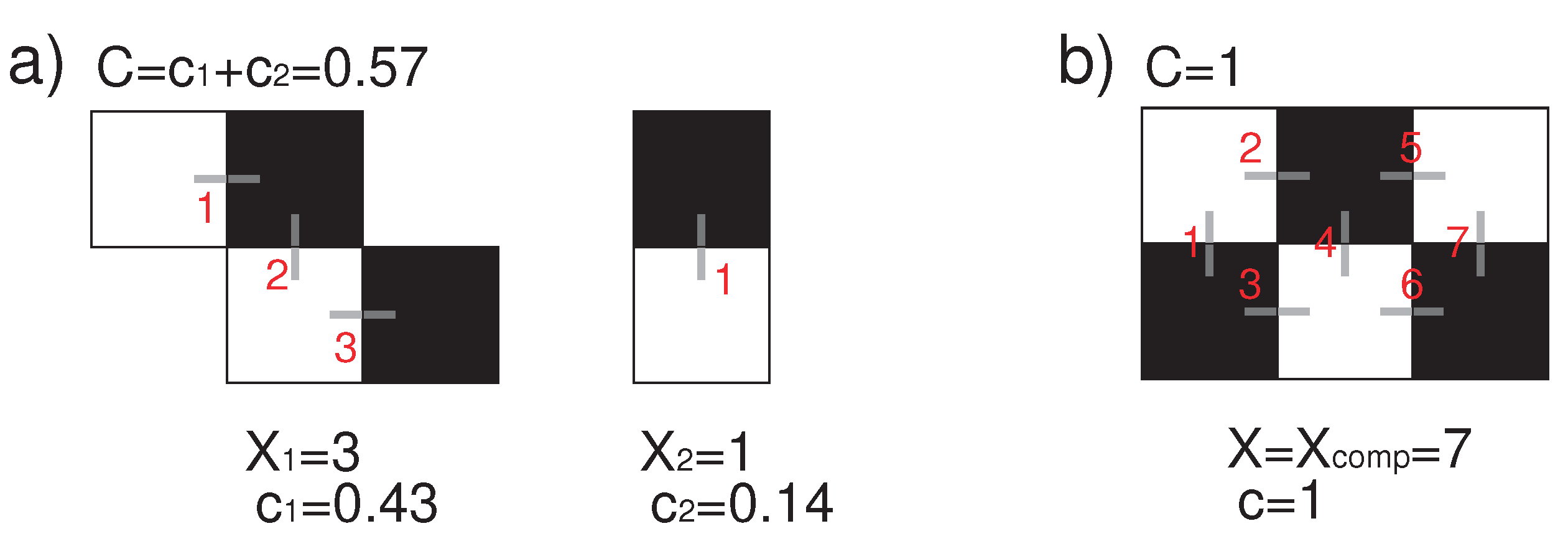
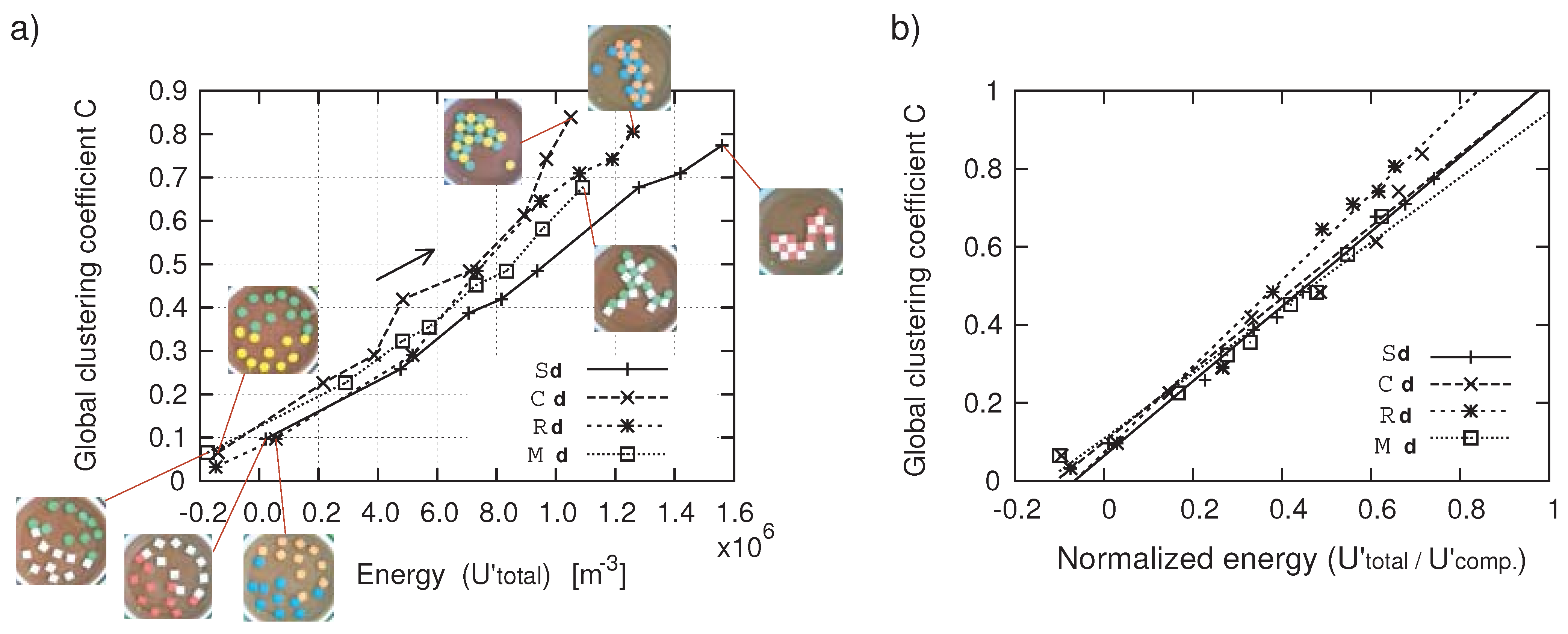
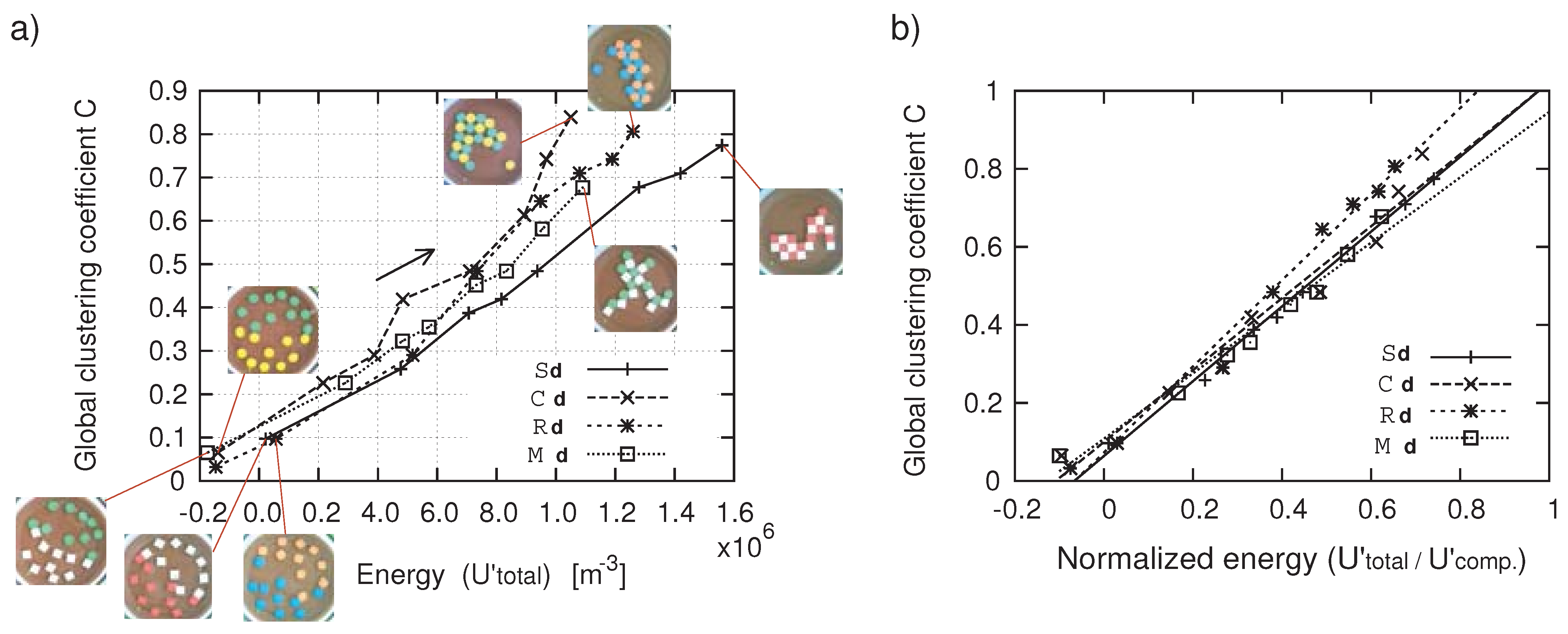
3.2. Clustering coefficients in a self-assembly system
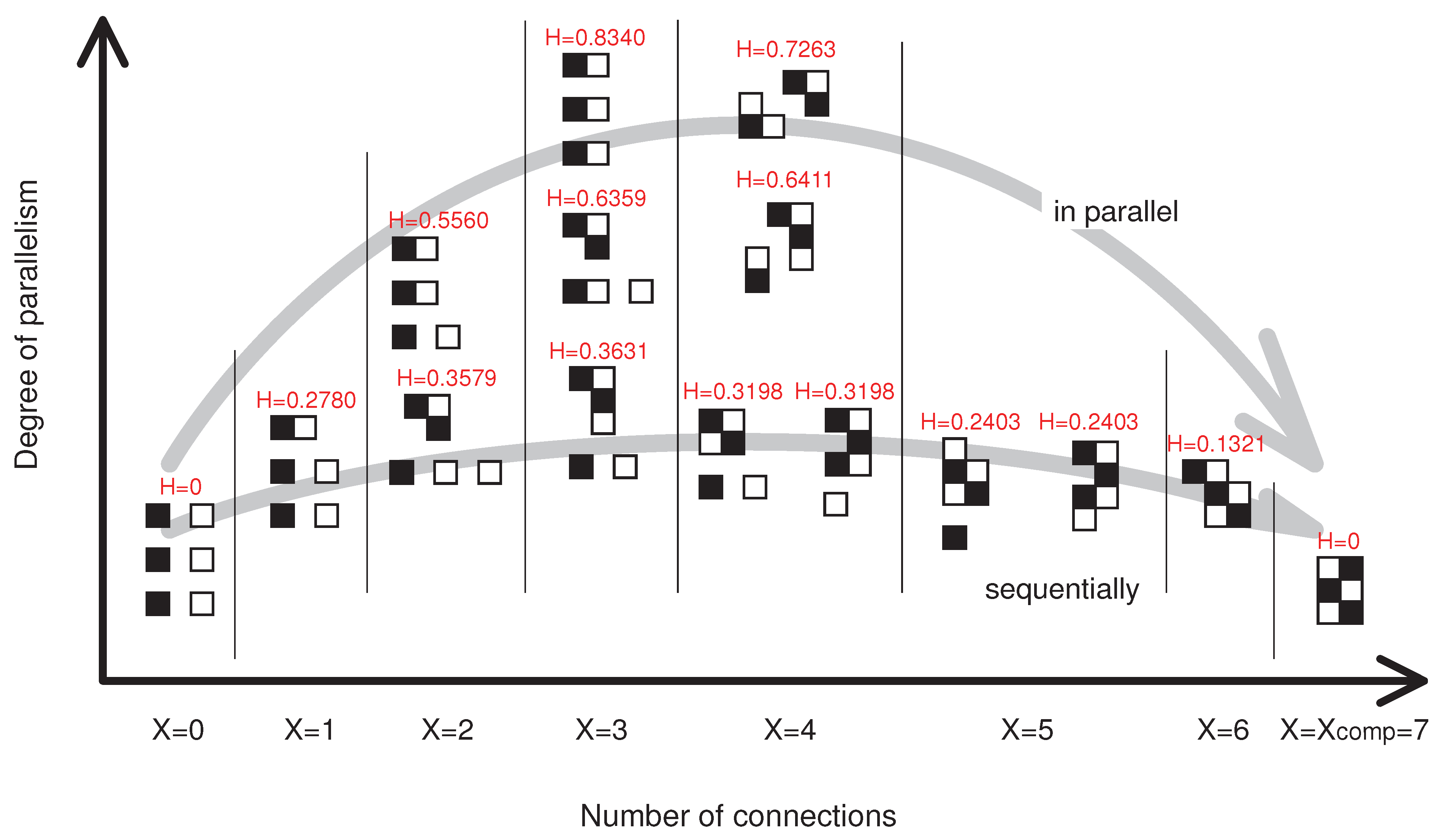
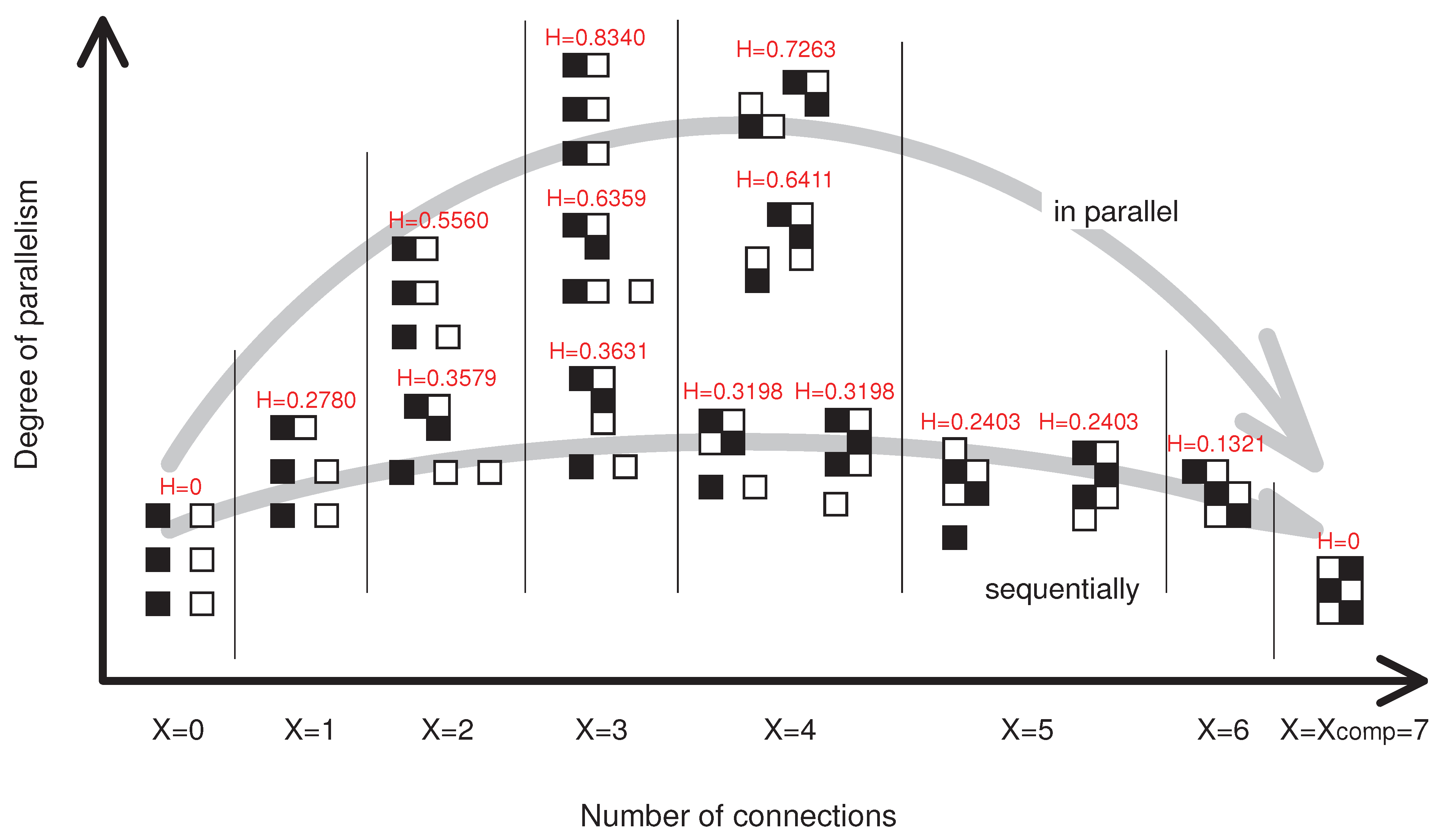
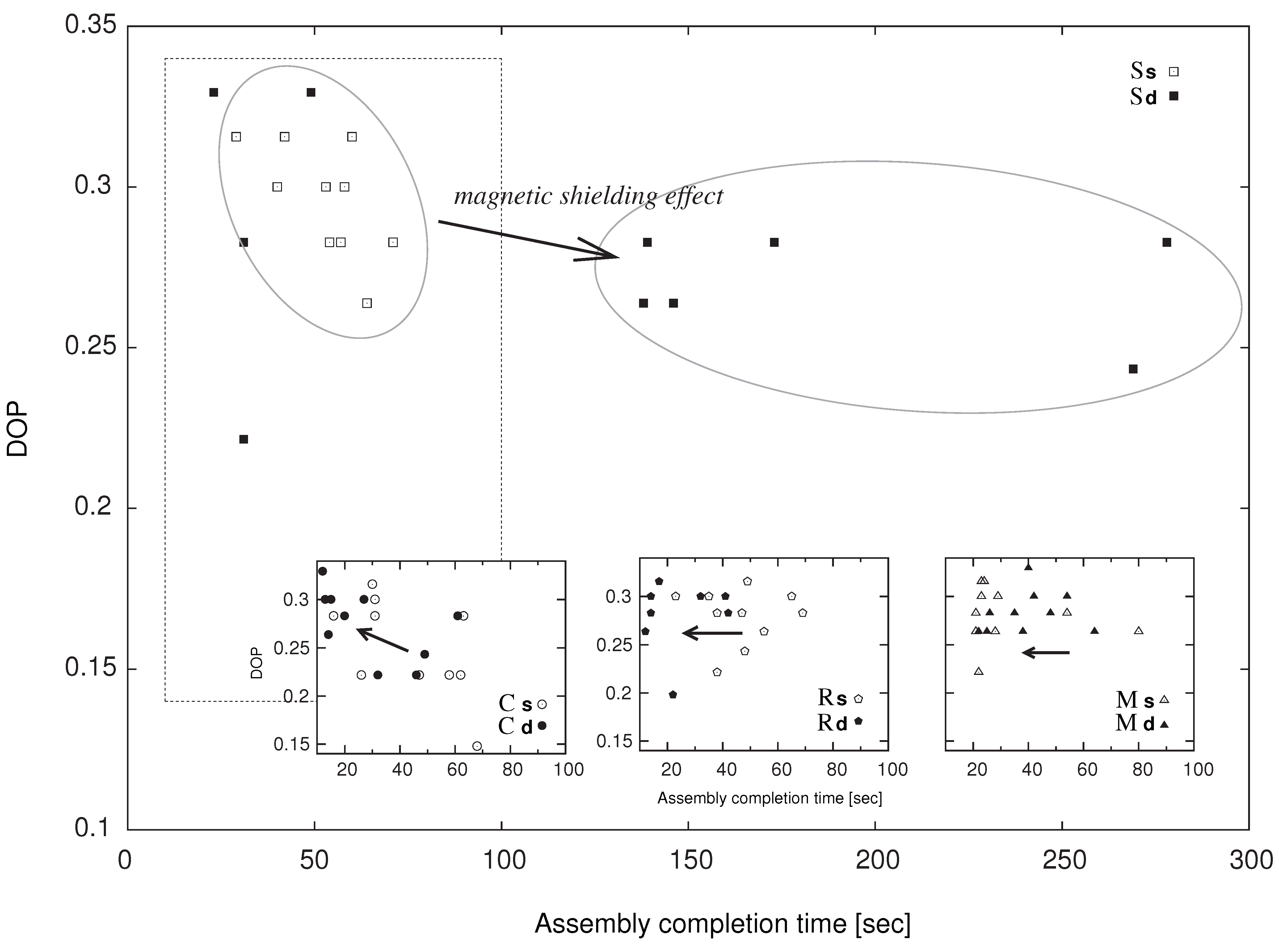
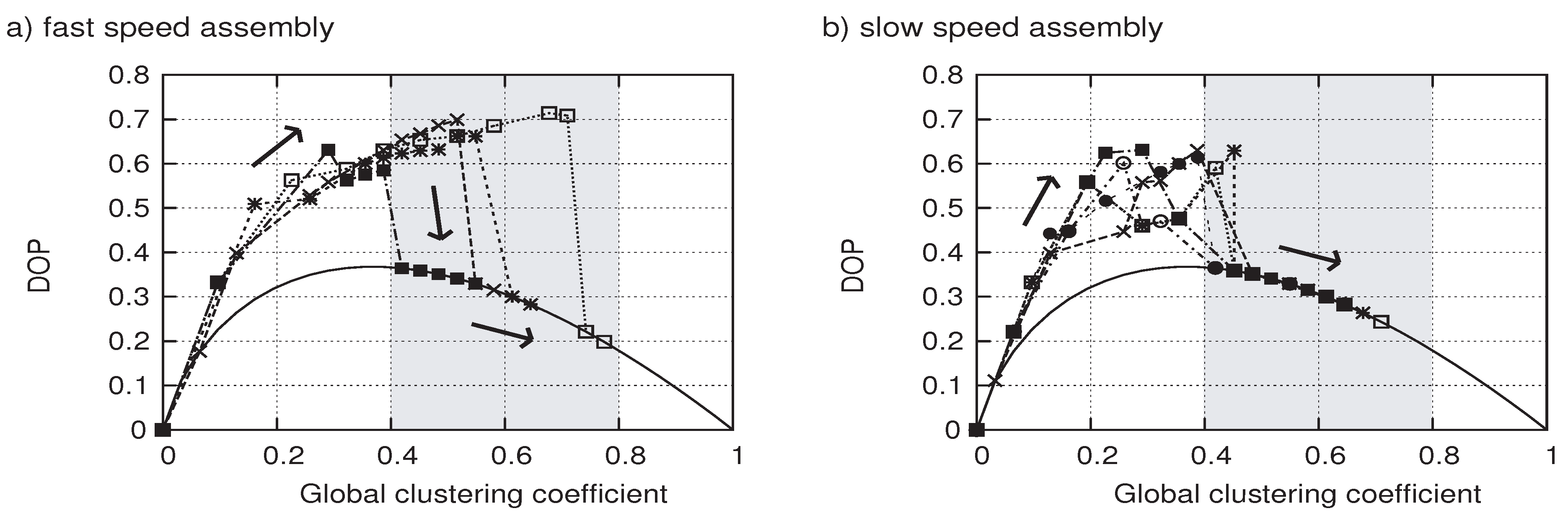
3.3. Entropy and Degree of parallelism (DOP)
4. The Experimental Results
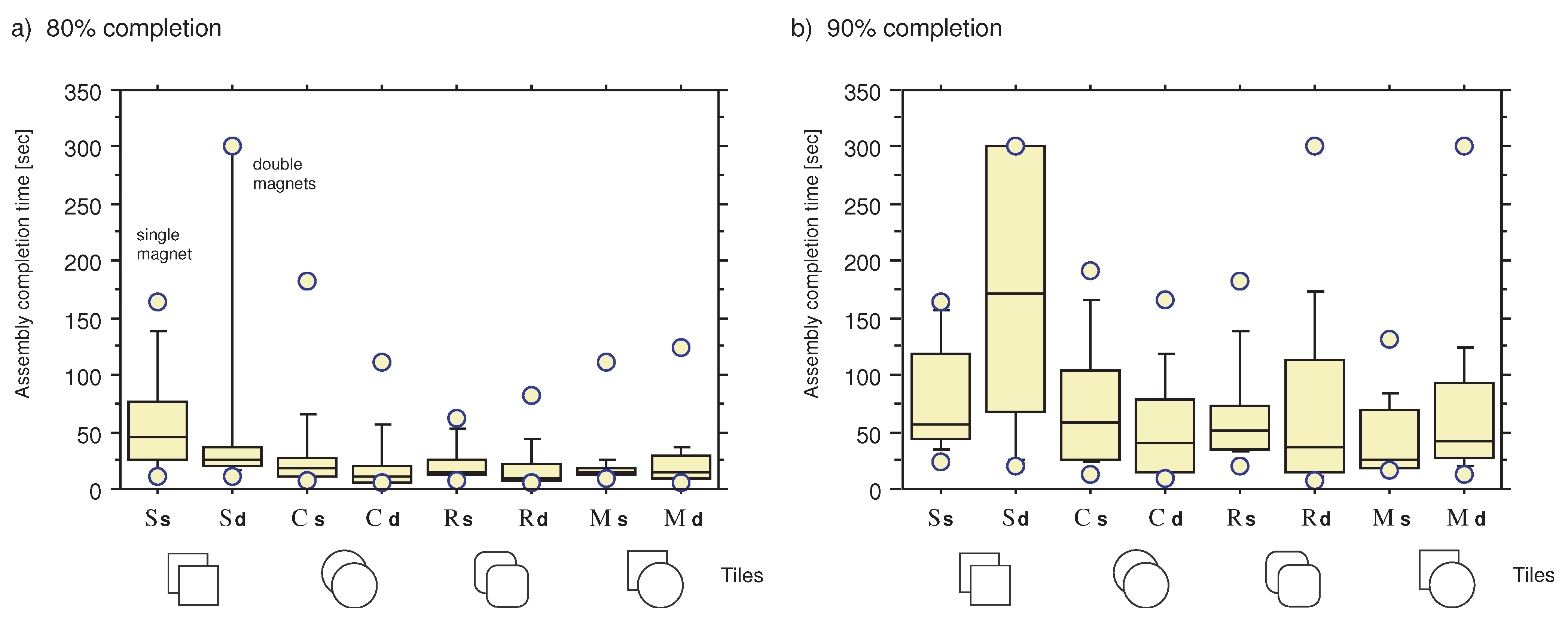
4.1. Assembly completion time
Comparison between different shapes

Comparison between differently magnetized tiles

| 80% | 90% | increase rate | 80% | 90% | increase rate | |
| Q1 | 26 | 43 | 19 | 69 | ||
| median | 45 | 56 | 26 | 172 | ||
| Q3 | 83 | 129 | 38 | 300 | ||
| average* | 56.5 | 76.6 | 136% | >68.5 | >184.2 | >269% |
| 80% | 90% | increase rate | 80% | 90% | increase rate | |
| Q1 | 10 | 26 | 6 | 13 | ||
| median | 18 | 59 | 10 | 41 | ||
| Q3 | 29 | 105 | 22 | 80 | ||
| average | 31.2 | 71.0 | 228% | 20.9 | 54.2 | 259% |
| 80% | 90% | increase rate | 80% | 90% | increase rate | |
| Q1 | 12 | 33 | 5 | 14 | ||
| median | 15 | 51 | 9 | 37 | ||
| Q3 | 26 | 76 | 19 | 117 | ||
| average* | 21.5 | 67.8 | 315% | 18.3 | >71.0 | >394% |
| 80% | 90% | increase rate | 80% | 90% | increase rate | |
| Q1 | 12 | 17 | 7 | 25 | ||
| median | 15 | 26 | 13 | 42 | ||
| Q3 | 18 | 77 | 33 | 96 | ||
| average* | 21.5 | 42.7 | 199% | 23.8 | >71.4 | >300% |
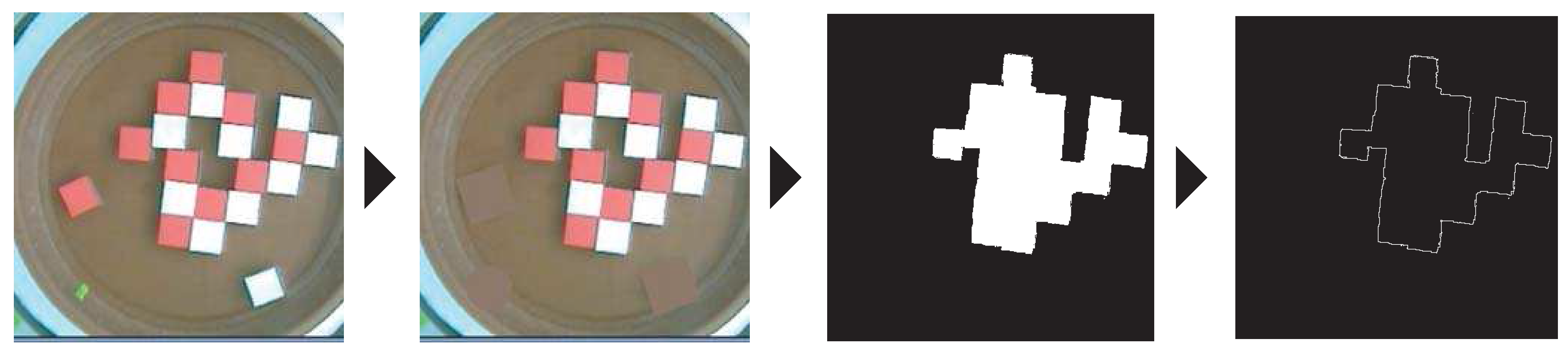
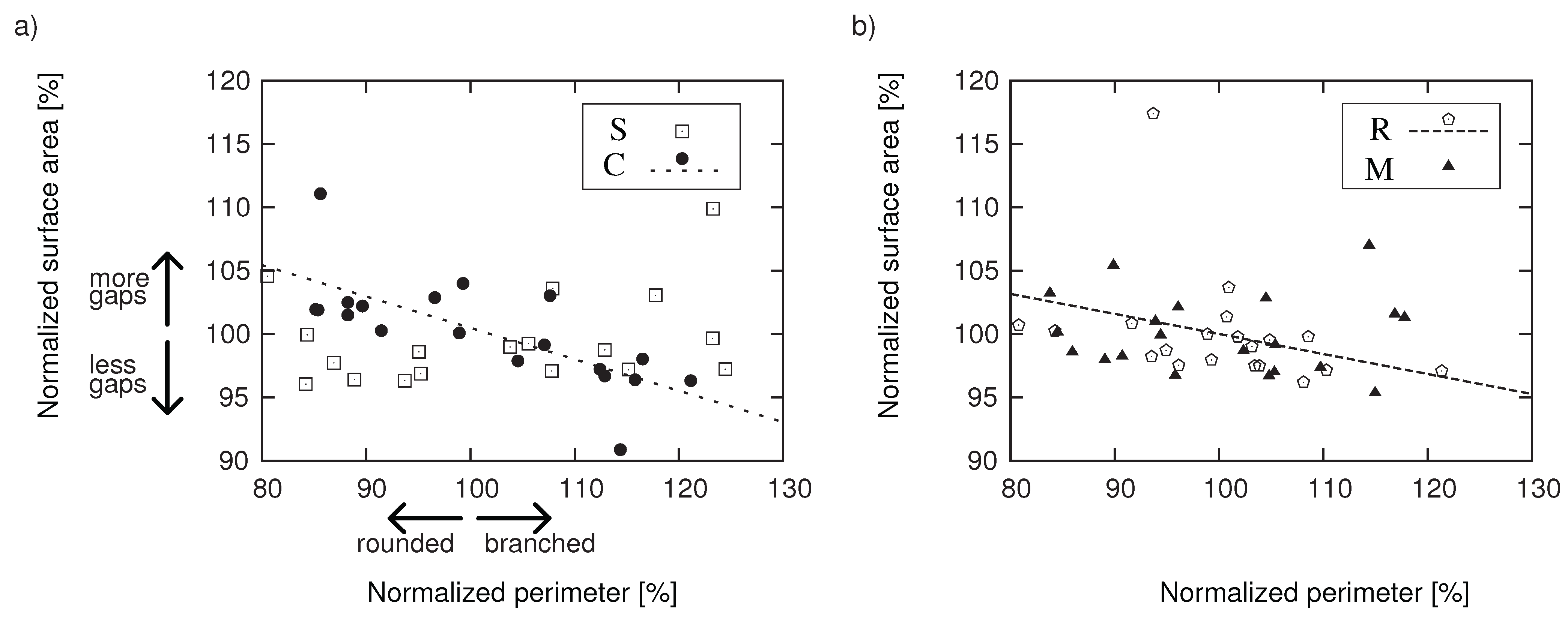
4.2. The formed structures

4.3. Time evolution
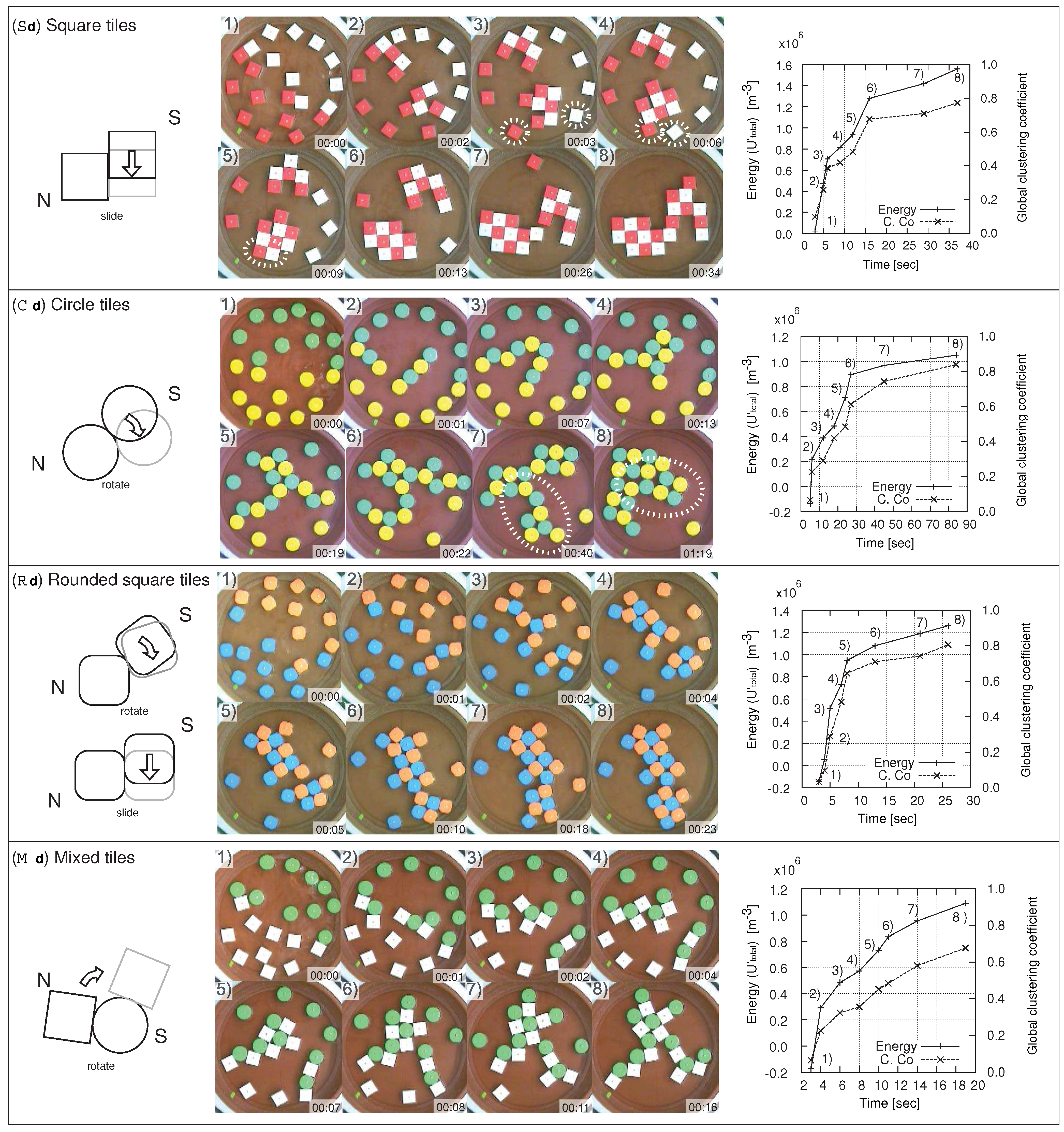
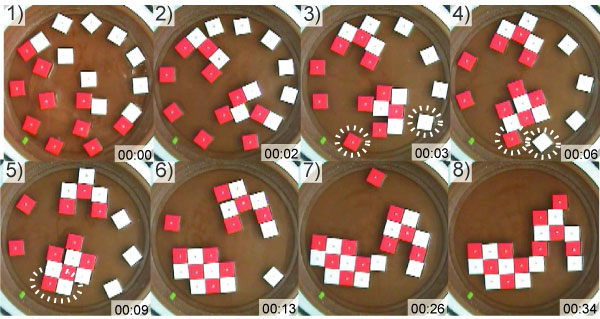
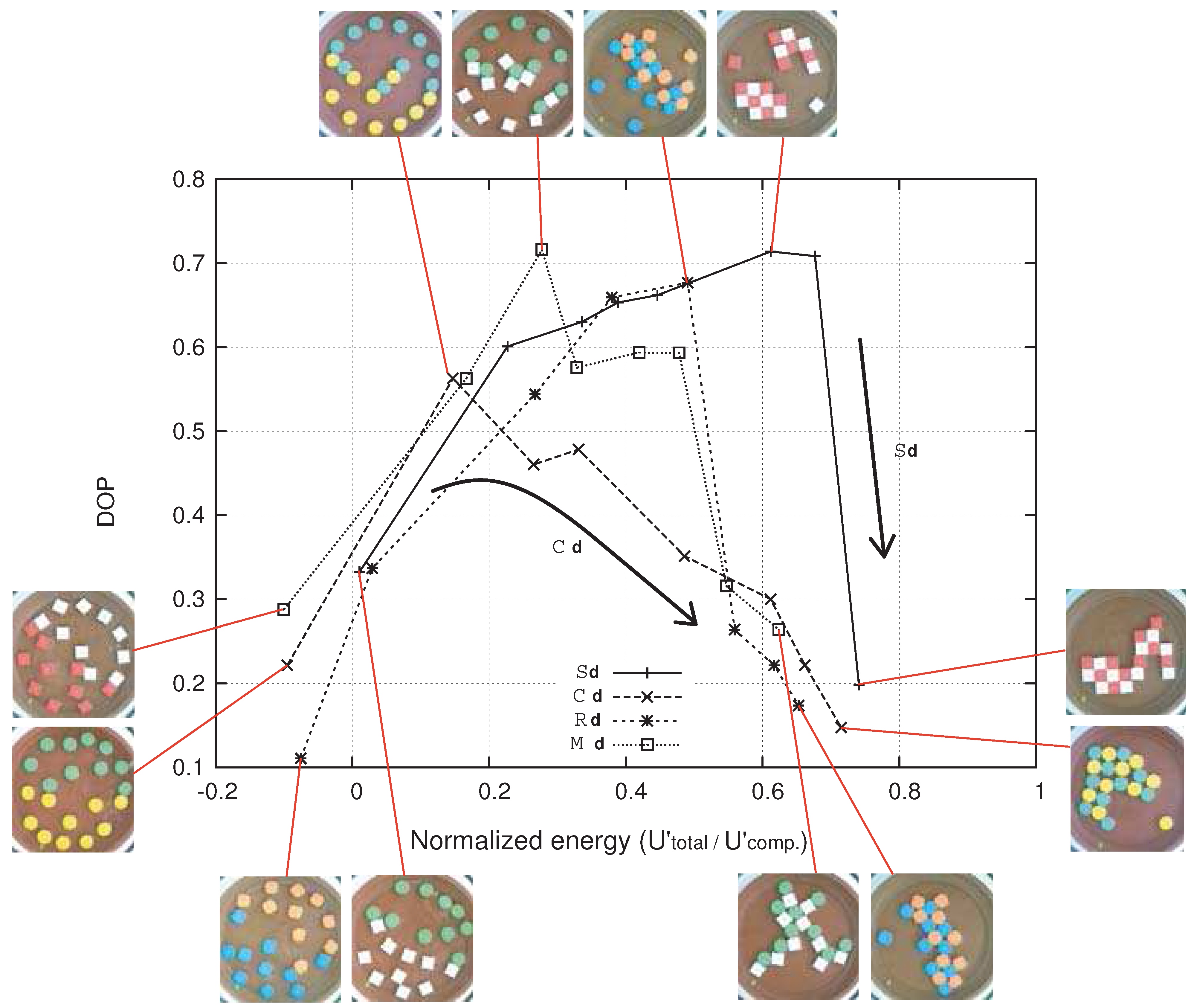
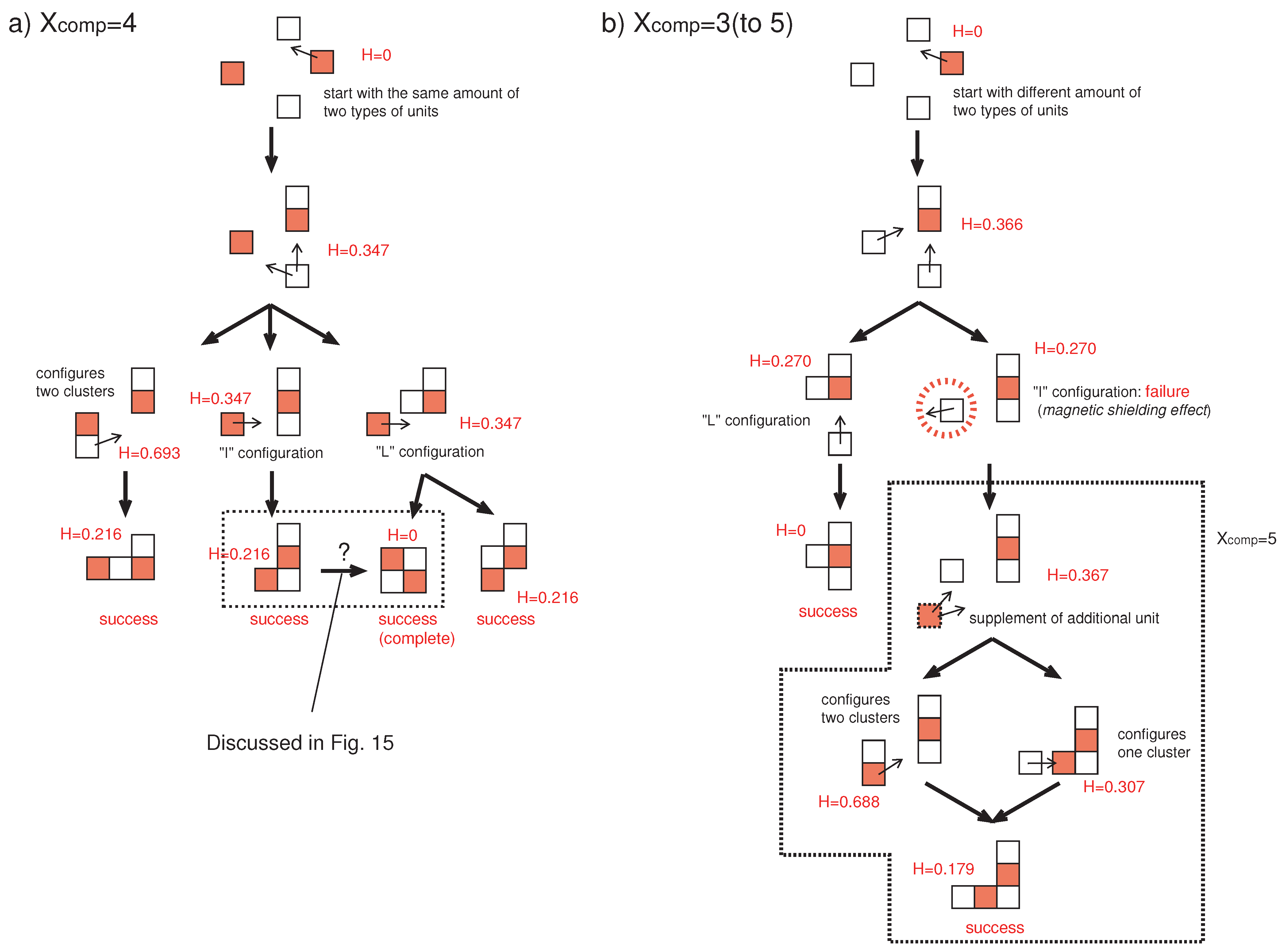
- : After the spacer was removed, the tiles moved randomly by changing their relative positions (1–3). The increase in potential energy and the clustering coefficients can be seen in the right figure. Once two tiles were attached (often adjusting their relative positions by sliding), the relatively strong connection force kept the connection tight (2, 7). Note that this results in a large value of the potential energy. This caused the tiles to stay in the same configuration, that is to say, reconfiguration was made more difficult (e.g., 8). As a result, the system produced an irregular shape (8). In this transition, the tiles first formed two small clusters (3–6) and subsequently they bonded together (7). It is worth noting that this large scale docking did not cause a big stored energy jump as expected (reflected in the right figure). This suggests that a major dominance of the energy is induced by locally connecting two tiles but among tiles that are apart. In addition to that, we observed that a white tile highlighted with a dotted circle was assisted to attach to the cluster by a red tile in the transformation from (3) to (5) (magnetic shielding effect, see Section 5).
- : In the beginning, several small groups were formed (1–2). The speed of aggregation was fast, whereas connections between two tiles were relatively weak and the tiles changed their relative positions smoothly (3–4 and 6–8). In particular, the transformation highlighted with a dotted circle that can be seen from (7) to (8) is supposed to be rarely observed in the square tile combinations (see Section 5). The increase in potential energy is lower than in the case of square tiles, especially since the closest distance between two magnets is greater (recall that we set the surface area of the tiles to be the same). The transition took 22s for 90% aggregation, and took 79s for the further global configuration (7–8).
- : The characteristic of these tiles was that they frequently rotated and changed directions according to the landscape of potential energy (2–4). These tiles possessed positive characteristics of both square and circle tiles, namely, a flexible reconfigurability and a stable lattice formation.Figure 9. Representative aggregations of 4 combinations in which more than 95 % of tiles aggregated. For each case of raw data, we present the time sequence of trials listed from the left top to the right bottom (with an illustration of the most discriminative movement of the set on the left side). On the right side, we show the transitions of the magnetic potential energy and the clustering coefficients.The lattice structure was reached rapidly (23s) and was sufficiently stable to resist agitation (8). The potential energy converged to a value between those for the cases of square tiles and circle tiles (shown on the right).Figure 9. Representative aggregations of 4 combinations in which more than 95 % of tiles aggregated. For each case of raw data, we present the time sequence of trials listed from the left top to the right bottom (with an illustration of the most discriminative movement of the set on the left side). On the right side, we show the transitions of the magnetic potential energy and the clustering coefficients.
![Entropy 11 00643 g009]()
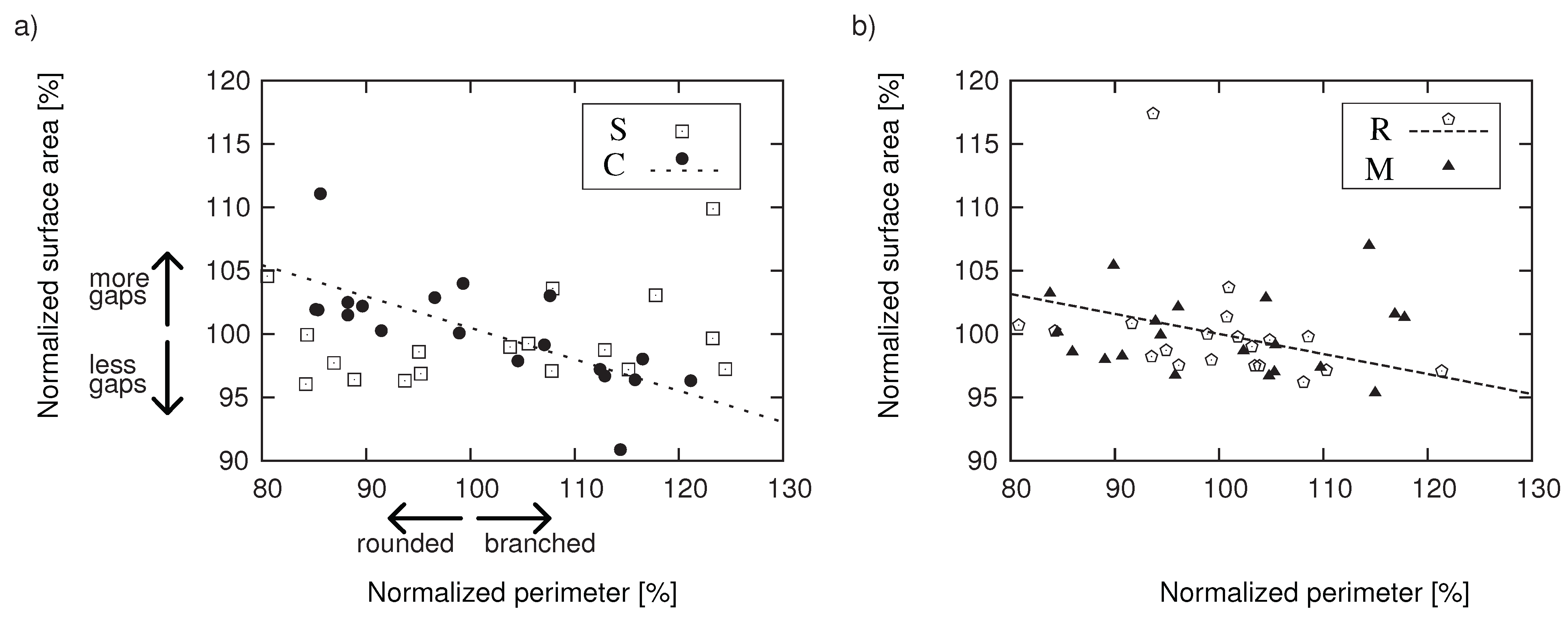
- : This was the only heterogeneous combination in terms of shape. Rotation was also observed. The circle tiles acted as a “hinge”, carrying a connected square tile to another position (2–3, 6). Structured lattice regions were stabilized by square tiles fixing the relative positions (8), while due to the flexibility of such combinations, the system often produced branching shapes, which were characterized by lowest clustering coefficients (see Figure 5 ).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

5. Discussion
5.1. Shape parameter consistency problem
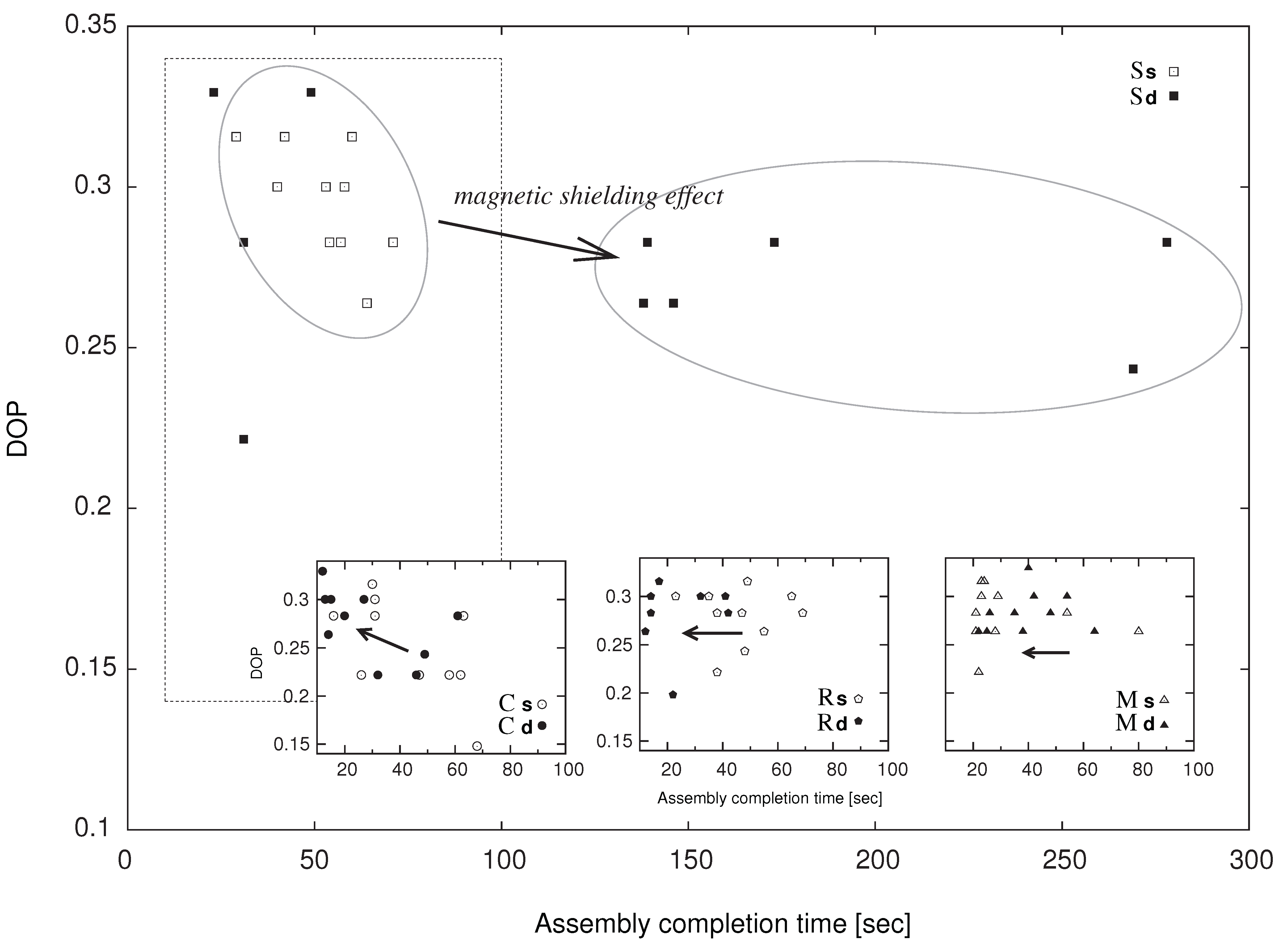
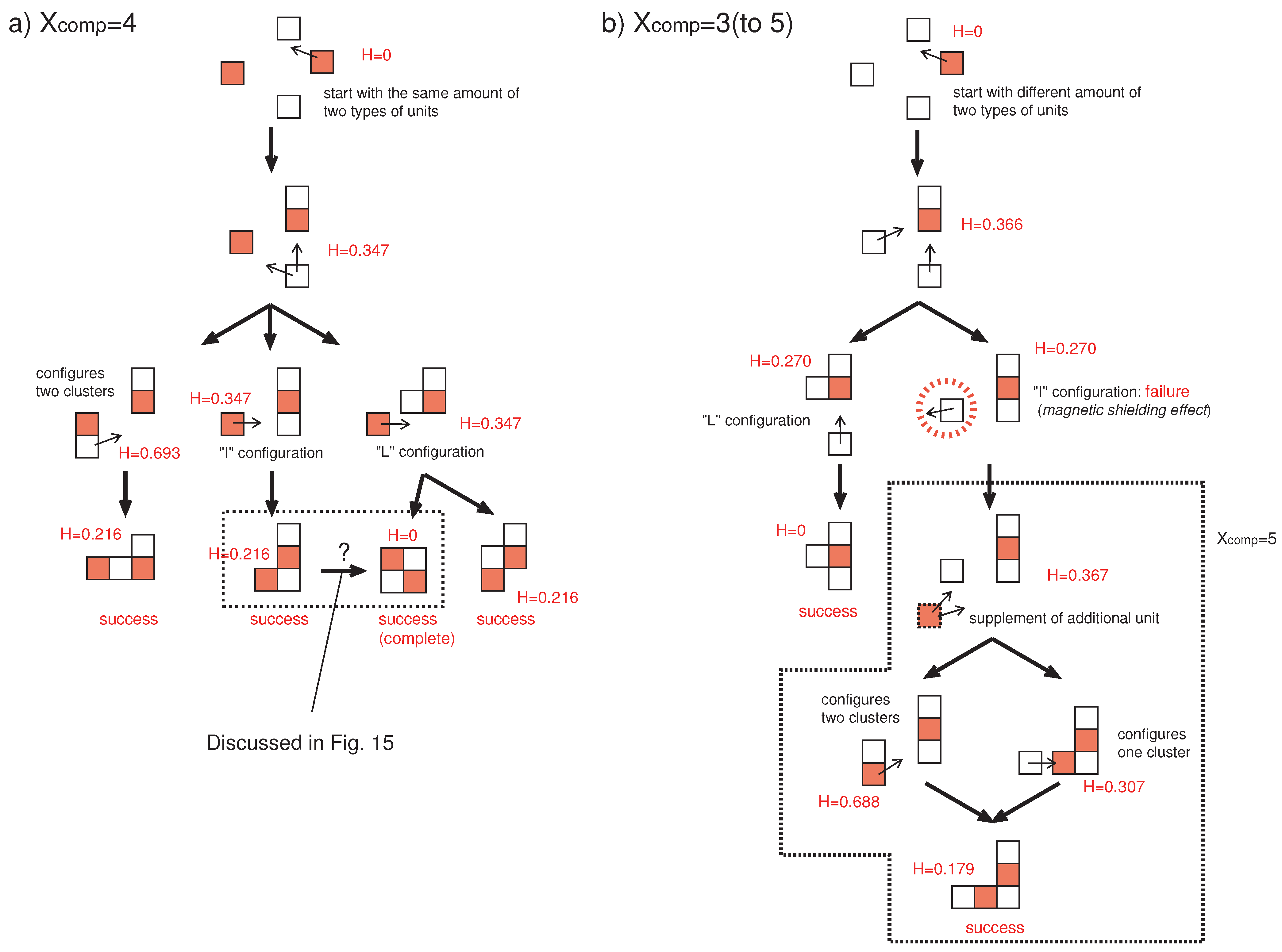
5.2. Magnetic shielding effect and the influence of shape on self-assembly
6. Conclusions
Acknowledgements
References
- Whitesides, G.M.; Grzybowski, B. Self-assembly at all scales. Science 2002, 295, 2418–2421. [Google Scholar] [CrossRef] [PubMed]
- Leiman, P.G.; Kanamaru, S.; Mesyanzhinov, V.V.; Arisaka, F.; Rossmann, M.G. Structure and morphogenesis of bacteriophage t4. Cell. Mol. Life Sci. 2003, 60, 2356–2370. [Google Scholar] [CrossRef] [PubMed]
- Nakagawa, A.; Miyazaki, N.; Taka, J.; Naitow, H.; Ogawa, A.; Fujimoto, Z.; Mizuno, H.; Higashi, T.; Watanabe, Y.; Omura, T.; Cheng, R.H.; Tsukihara, T. The atomic structure of rice dwarf virus reveals the self-assembly mechanism of component proteins. Structure 2003, 11, 1227–1238. [Google Scholar] [CrossRef] [PubMed]
- Alberts, B.; Hohnson, A.; Lewis, J.; Raff, M.; Roberts, K.; Walter, P. Molecular Biology of the Cell; Garland Science: New York, NY, USA, 2002. [Google Scholar]
- Penrose, L.S. Self-reproducing. Sci. Amer. 1959, 200-6, 105–114. [Google Scholar] [CrossRef]
- Hosokawa, K.; Shimoyama, I.; Miura, H. Dynamics of self-assembling systems: Analogy with chemical kinetics. Artif. Life 1994, 1, 413–427. [Google Scholar] [CrossRef]
- Hosokawa, K.; Shimoyama, I.; Miura, H. 2-d micro-self-assembly using the surface tension of water. Sens. Actuators. A 1996, 57, 117–125. [Google Scholar] [CrossRef]
- Bowden, N.; Terfort, A.; Carbeck, J.; Whitesides, G.M. Self-assembly of mesoscale objects into ordered two-dimensional arrays. Science 1997, 276, 233–235. [Google Scholar] [CrossRef] [PubMed]
- Grzybowski, B.A.; Stone, H.A.; Whitesides, G.M. Dynamic self-assembly of magnetized, millimetre-sized objects rotating at a liquid-air interface. Nature 2000, 405, 1033. [Google Scholar] [PubMed]
- Grzybowski, B.A.; Winkleman, A.; Wiles, J.A.; Brumer, Y.; Whitesides, G.M. Electrostatic self-assembly of macroscopic crystals using contact electrification. Nature 2003, 2, 241–245. [Google Scholar] [CrossRef] [PubMed]
- Grzybowski, B.A.; Radkowski, M.; Campbell, C.J.; Lee, J.N.; Whitesides, G.M. Self-assembling fluidic machines. Appl. Phys. Lett. 2004, 84, 1798–1800. [Google Scholar] [CrossRef]
- Saitou, K. Conformational switching in self-assembling mechanical systems. IEEE Trans. Rob. Autom. 1999, 15, 510–520. [Google Scholar] [CrossRef]
- Winfree, E.; Liu, F.; Wenzler, L.A.; Seeman, N.C. Design and self-assembly of two-dimensional dna crystals. Nature 1998, 394, 539–544. [Google Scholar] [CrossRef] [PubMed]
- Seeman, N.C. DNA in a material world. Nature 2003, 421, 427–430. [Google Scholar] [CrossRef] [PubMed]
- Mao, C.; LaBean, T.H.; Reif, J.H.; Seeman, N.C. Logical computation usingalgorithmic self-assembly. Nature 2000, 407, 493–496. [Google Scholar] [PubMed]
- Shih, W.M.; Quispe, J.D.; Joyce, G.F. A 1.7-kilobase single-stranded dna that folds into a nanoscale octahedron. Nature 2004, 427, 618–621. [Google Scholar] [CrossRef] [PubMed]
- Rothemund, P. W.K. Folding dna to create nanoscale shapes and patterns. Nature 2006, 440, 297–302. [Google Scholar] [CrossRef] [PubMed]
- Yokoyama, T.; Yokoyama, S.; Kamikado, T.; Okuno, Y.; Mashiko, S. Selective assembly on a surface of supramolecular aggregates with controlled size and shape. Nature 2001, 413, 619–621. [Google Scholar] [CrossRef] [PubMed]
- White, P.; Kopanski, K.; Lipson, H. Stochastic self-reconfigurable cellular robotics. In Proc. IEEE Int. Conf. Rob. Autom. (ICRA); New Orleans, LA, USA, 2004; Volume 3, pp. 2888–2893. [Google Scholar]
- White, P.; Zykov, V.; Bongard, J.; Lipson, H. Three dimensional stochastic reconfiguration of modular robots. In Proc. Int. Conf. Rob. Sci. Sys. (RSS); The MIT Press: Cambridge, MA, USA, 2005; pp. 161–168. [Google Scholar]
- Shimizu, M.; Ishiguro, A. A modular robot that exploits a spontaneous connectivity control mechanism. In Proc. IEEE Int. Conf. Rob. Autom. (ICRA); Barcelona, Spain, 2005; pp. 2658–2663. [Google Scholar]
- Bishop, J.; Burden, S.; Klavins, E.; Kreisberg, R.; Malone, W.; Napp, N.; Nguyen, T. Programmable parts: A demonstration of the grammatical approach to self-organization. In Proc. IEEE/RSJ Int. Conf. Intell. Rob. Sys. (IROS); Edmonton, AB, Canada, 2005; pp. 3684–3691. [Google Scholar]
- Griffith, S.; Goldwater, D.; Jacobson, J. Robotics: Self-replication from random parts. Nature 2005, 437, 636. [Google Scholar] [CrossRef] [PubMed]
- Nagy, Z.; Oung, R.; Abbott, J.J.; Nelson, B.J. Experimental investigation of magnetic self-assembly for swallowable modular robots. In Proc. IEEE/RSJ Int. Conf. Intell. Rob. Sys. (IROS); Nice, France, 2008. [Google Scholar]
- Miyashita, S.; Kessler, M.; Lungarella, M. How morphology affects self-assembly in a stochastic modular robot. In Proc. IEEE Int. Conf. Rob. Autom. (ICRA); Pasadena, CA, USA, 2008. [Google Scholar] [Green Version]
- Miyashita, S.; Casanova, F.; Lungarella, M.; Pfeifer, R. Peltier-based freeze-thaw connector for waterborne self-assembly systems. In Proc. IEEE Int. Conf. Intell. Rob. Sys. (IROS); Nice, France, 2008; pp. 1325–1330. [Google Scholar]
- Watts, D.J.; Strogatz, S.H. Collective dynamics of ’small-world’ networks. Nature 1998, 393, 440–441. [Google Scholar] [CrossRef] [PubMed]
- Adleman, L. Linear self-assemblies: Equilibria, entropy and convergence rates. In Proc. Sixth Int. Conf. on Differ. Equ.; Taylor and Francis: London, UK, 2001. [Google Scholar]
- Fujibayashi, K.; Murata, S.; Sugawara, K.; Yamamura, M. Self-organizing formation algorithm for active elements. Forma 2003, 18, 83–95. [Google Scholar]
Appendix
| trials | 80% | 90% | 80% | 90% | 80% | 90% | 80% | 90% |
| 1 | 12 | 34 | 19 | 136 | 9 | 26 | 16 | 56 |
| 2 | 45 | 45 | 142 | 162 | 8 | 27 | 6 | 10 |
| 3 | 51 | 56 | 33 | 46 | 19 | 54 | 13 | 29 |
| 4 | 19 | 129 | 19 | 20 | 18 | 109 | 22 | 24 |
| 5 | 26 | 53 | 17 | 172 | 29 | 59 | 7 | 13 |
| 6 | 11 | 24 | 38 | 266 | 18 | 26 | 56 | 119 |
| 7 | 46 | 55 | 27 | 27 | 10 | 23 | 26 | 117 |
| 8 | 58 | 58 | 26 | >300 | 23 | 166 | 6 | 11 |
| 9 | 90 | 90 | >300 | >300 | 29 | 97 | 11 | 80 |
| 10 | 83 | 157 | 26 | 26 | 182 | 192 | 11 | 46 |
| 11 | 36 | 67 | 20 | 300 | 12 | 13 | 10 | 41 |
| 12 | 138 | 138 | 21 | 135 | 25 | 105 | 7 | 11 |
| 13 | 164 | 164 | 29 | 273 | 14 | 59 | 6 | 17 |
| 14 | 26 | 36 | 11 | 300 | 65 | 65 | 5 | 73 |
| 15 | 43 | 43 | >300 | >300 | 16 | 44 | 111 | 166 |
| average* | 56.5 | 76.6 | >68.5 | >184.2 | 31.2 | 71.0 | 20.9 | 54.2 |
| trials | 80% | 90% | 80% | 90% | 80% | 90% | 80% | 90% |
| 1 | 14 | 183 | 82 | 139 | 10 | 17 | 20 | 38 |
| 2 | 18 | 138 | 8 | 14 | 13 | 77 | 7 | 20 |
| 3 | 13 | 43 | 10 | 28 | 12 | 17 | 36 | 96 |
| 4 | 26 | 65 | 10 | 174 | 12 | 36 | 5 | 81 |
| 5 | 8 | 20 | 19 | 39 | 18 | 84 | 124 | 124 |
| 6 | 12 | 46 | 5 | 11 | 17 | 26 | 14 | 25 |
| 7 | 24 | 32 | 9 | 11 | 14 | 26 | 10 | 106 |
| 8 | 27 | 76 | 5 | 8 | 26 | 48 | 13 | 42 |
| 9 | 15 | 45 | 8 | 17 | 20 | 23 | 34 | 50 |
| 10 | 13 | 130 | 22 | 37 | 15 | 81 | 15 | 34 |
| 11 | 12 | 51 | 5 | 37 | 17 | 17 | 8 | 12 |
| 12 | 15 | 33 | 9 | >300 | 10 | 17 | 33 | 37 |
| 13 | 62 | 62 | 43 | 104 | 12 | 21 | 19 | >300 |
| 14 | 12 | 33 | 11 | 117 | 112 | 132 | 13 | 21 |
| 15 | 52 | 60 | 29 | 29 | 15 | 19 | 6 | 65 |
| average* | 21.5 | 67.8 | 18.3 | >71.0 | 21.5 | 42.7 | 23.8 | >71.4 |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Miyashita, S.; Nagy, Z.; Nelson, B.J.; Pfeifer, R. The Influence of Shape on Parallel Self-Assembly. Entropy 2009, 11, 643-666. https://doi.org/10.3390/e11040643
Miyashita S, Nagy Z, Nelson BJ, Pfeifer R. The Influence of Shape on Parallel Self-Assembly. Entropy. 2009; 11(4):643-666. https://doi.org/10.3390/e11040643
Chicago/Turabian StyleMiyashita, Shuhei, Zoltán Nagy, Bradley J. Nelson, and Rolf Pfeifer. 2009. "The Influence of Shape on Parallel Self-Assembly" Entropy 11, no. 4: 643-666. https://doi.org/10.3390/e11040643