1. Introduction
Entropy is a ubiquitous tool in physics and mathematics. It measures randomness in dynamical systems, uncertainty in information theory and disorder in statistical mechanics.
Topological entropy was introduced in 1965 by Adler, Konheim and McAndrew [
1] as an invariant of topological conjugacy for maps of the interval. Along with the Lyapunov exponent, topological entropy is one of the preferred indicators for complexity in topological dynamics. The numerical computation of topological entropy has been and remains an active topic of research, as witnessed by a number of relevant publications in the last decades.
Let
I be a compact interval
and
be a continuous piecewise monotone map. Such a map is called
l-modal if
f has precisely
l turning points (
i.e., points in
where
f has a local extremum). Assume that
f has local extrema at
and that
f is strictly monotone in each of the
intervals
To such map one can assign a positive or negative
shape which describes whether
f is increasing or decreasing on its first lap
. In proofs it is occasionally convenient to use the convention
and
. Sometimes the additional condition
is also required (see for instance [
2]); in this case we speak of
boundary-anchored maps. We shall also consider boundary-anchored maps below but only as a special case, since the general algorithm for the topological entropy then simplifies quite a bit.
The
itinerary of
under
f is the sequence
defined as follows:
The itineraries of the critical points,
are called the
kneading sequences(or
invariants) of
f.
Let
denote the topological entropy of an
l-modal map
. Then [
3,
4],
where Var
stands for the variation of
, and
is shorthand for the
lap number of
(
i.e., the number of maximal monotonicity segments of
). There are relations similar to (
1) and (
2), involving the number of fixed points of
(
i.e., the number of periodic points of period
n), or the length of the graph of
.
The methods proposed in the literature to compute
, use typically kneading sequences [
5,
6,
7], approximating piecewise linear maps [
8] and Markov maps [
9], the Ruelle–Perron–Frobenius operator [
10], or one of the expressions (
1) and (
2) [
11,
12]. Their virtues and shortcomings are also discussed in the literature. For instance, some are meant only for unimodal maps [
5,
7] or bimodal maps [
6]. Others apply to not necessarily continuous piecewise monotone maps of the interval, however they are not efficient nor even accurate [
8].
The method proposed here calculates the lap numbers
,
, and the topological entropy follows from (
2). It applies to
multimodal maps with or without boundary conditions. The main ingredient of this approach are the so-called min-max sequences—symbolic sequences that encode the coarse-grained information about the extrema of the maps
,
. It generalizes an approach for
unimodal,
boundary anchored maps, introduced in [
13,
14], further developed in [
15], and extended for boundary free maps in [
16].
The method proposed here is conceptually simple, is direct, is geometrical and is computationally efficient, calculating the lap numbers in a recursive way. The structure of the algorithm is the same for all
l-modal maps, independently of the value of
l. Regarding computing speed, we shall not provide any sharper bound than the
convergence rate derivable on general grounds [
12]. Nonetheless, numerical simulations confirm the excellent performance of the algorithm—except when
, in which case the convergence is slow.
The rest of the paper is organized as follows. In
Section 2 we introduce the min-max sequences of a map
, where
is the class of twice differentiable
l-modal maps. This assumption simplifies the proofs but the results obtained in this paper apply to the class of continuous piecewise monotonous maps. In
Section 3, we derive a number of technical lemmas, which are needed in the next two sections.
Section 4 is devoted to clarify the connection between the min-max sequences of a map and the structure of its extrema, exploring the geometrical meaning of the min-max sequences. This connection leads in
Section 5 to the main result of the paper, Theorem 5.3, which provides a recursive scheme for computing
(hence
) with arbitrary precision. It turns out that the general scheme of Theorem 5.3 simplifies in some special cases, notably for
boundary-anchored maps and for
unimodal maps; these cases are separately discussed in
Section 6. The paper concludes with the logical flow of the algorithm (
Section 7), and a summary of numerical simulations with 2- and 3-modal maps (
Section 8).
2. Geometry of the Itineraries: The Min-Max Sequences for l-Modal Maps
Henceforth we consider the class
of twice differentiable
l-modal maps. Since the results we obtain in
Section 5 for the calculation of lap numbers and topological entropy do not depend on the shape of
f, we shall assume throughout that the shape of
f is positive, that is,
where
[resp.
] denotes any
with
odd [resp. even], and
,
are meant to be the appropriate one-sided derivatives.
The chain rule for derivation applied to the
nth iterate of
f, written
(
is the identity map),
implies trivially
which shows that
are critical points of
for every
. From (
5) we conclude also the following.
Lemma 2.1. If , then the critical points of , , are the points such that for some and .
Therefore, the critical points of with are the pre-images of the critical points ,..., up to order .
Our next scope is a relation between the kneading sequences of
and the structure of local extrema of
. According to the assumption (
3),
where
.
The next lemma follows readily from (
4) and
Lemma 2.2. Let , and . Then:- (a)
If with i odd, then is a maximum. If with i even, then is a minimum.
- (b)
If is a minimum, then - (b)
If is a maximum, then
For our purposes it will be sufficient to know which element of the partition
the points
,
and
belong to. This information can be conveniently codified by assigning to
a
signature defined as follows: For
,
Therefore there are only
signatures, one for each element of
. Note that if
,
, then
Otherwise, if
,
, then
The cases
,
or
need no further comments. Thus, in a signature the +’s appear always left of the −’s, occasionally separated by a 0.
Two further tools will prove useful later on.
We borrow from the real analysis a product ‘·’ among the symbols
:
If in , then , where here < stands for the lexicographical order of signatures induced by .
Suppose that , , has a maximum [resp. minimum] at some point . We say that is a maximum [resp. minimum] with signature if . Sometimes we also say that is a σ-maximum [resp. σ-minimum] with the obvious meaning.
To locate the extrema of
in
I up to the precision set by the partition
, we introduce a new alphabet
where
m stands for “minimum”,
M stands for “maximum”, and the superscript
σ is the pertaining signature,
i.e., if
is the minimum or maximum considered, then
. Correspondingly we say that
is an extremum of
type [resp.
], or just that
is a
σ-minimum [resp.
σ-maximum].
Next we define
l sequences
,
, as follows:
The sequences
are called the
min-max sequences of
, or MMSs for short. The geometric meaning of
is clear:
is a maximum (if
) or a minimum (if
) with signature
.
By particularizing Lemma 2.2 to
,
, and
,
, we get the
transition rules listed in
Table 1.
Table 1.
Consecutive symbols in the MMS follow the above transition rules.
Table 1.
Consecutive symbols in the MMS follow the above transition rules.
| → | |
| → | |
| → | |
| → | |
| → | |
| → | |
| → | |
The signature
appearing on the right column is given as in (
8) with
. Thus, once we know the kneading sequences
,
, and the initial components of the MMSs,
, we can calculate the MMSs
of
f by means of the transition rules in
Table 1.
3. Auxiliary Lemmas
As stated before, the generic structure of a signature is
Therefore, when comparing component-wise two signatures, only three cases can happen: (i) all components coincide, (ii) they differ in a single component, or (iii) they differ in a number of
consecutive components. Of course, case (ii) can be considered as a “degenerate” subcase of (iii), as we will do in the sequel.
Let
and set,
In particular,
. According to Lemma 2.1,
contains
and its preimages up to order
. This same lemma implies that if
is a critical point of
,
, then
x is also a critical point of
for
. Hence,
. It follows from Lemma 2.2 that all these critical points are local maxima or minima, but not inflexion points.
Furthermore, let
[resp.
] be the leftmost [resp. rightmost] critical point of
,
i.e.,
for
. Observe that
and
.
Lemma 3.1. Let and , , betwo consecutive critical points of ( if ), or
and , or
, and .
Then,- (a)
If for (, ) and otherwise, then there exist critical points ,..., of in . Furthermore, , , and has a maximum at if is even (hence is a -maximum in this case), while has a minimum at if is odd (hence is a -minimum in this case). Moreover, if , while if .
- (b)
Otherwise (i.e., for ), there exist no critical points of in .
The geometrical interpretation of this lemma in the Cartesian plane
is clear. If
in (a), then the curve
,
, crosses transversally the “
ith critical line”
, and none of the other critical lines (if any)
,
. If
, then this curve crosses transversally
successive critical lines, namely,
up to
, and none of the remaining ones (if any). In (b) both
and
belong to the same interval
, so
does not cross any critical line when
.
Proof. (a) Suppose
(the case
follows analogously). By the monotonicity of
in
and the Mean Value Theorem, there exist exactly
different points
such that
for
. Then
and
Therefore,
because according to (
6),
is a maximum in the first case, and a minimum in the second.
The statement about the relative positions of , is obvious from the geometrical interpretation.
(b) This assertion is straightforward. ☐
Setting
,
in Lemma 3.1, we conclude the following results.
Lemma 3.2. Let and .- (a)
If for (, ) and otherwise, then . Furthermore, if , then , and is a -maximum if is odd or a -minimum if is even. If , then , and is a -maximum if is even or a -minimum if is odd.
- (b)
Otherwise (i.e.,
for ), holds. Furthermore,- (b1)
is a maximum if (i) is a maximum and , or (ii) is a minimum and ;
- (b2)
is a minimum if (i) is a maximum and , or (ii) is a minimum and .
Proof. (a) is a corollary of Lemma 3.1 (a). The first statement of (b) is a corollary of Lemma 3.1 (b).
As for (b1) and (b2),
because
is a critical point of
. Moreover,
Thus,
and
have the same sign if and only if
(so as
, see (
3)). ☐
And setting
,
in Lemma 3.1, we derive the following results in a way similar to Lemma 3.2.
Lemma 3.3. Let and .- (a)
If for (, ) and otherwise, then . Furthermore, if , then , and is a -maximum if is even or a -minimum if is odd. If , then , and is a -maximum if is odd or a -minimum if is even.
- (b)
Otherwise (i.e.,
for ), holds. Furthermore,- (b1)
is a maximum if (i) is a maximum and , or (ii) is a minimum and ;
- (b2)
is a minimum if (i) is a maximum and , or (ii) is a minimum and .
The results for boundary-anchored maps are simpler. Since we are assuming that
has a positive shape, the boundary conditions of such a map read:
for any
l, and
for
l odd, or
for
l even. It follows
, and
or
, respectively, for any
. To prove the next two lemmas, the following weaker boundary conditions are sufficient, though:
- (BC1)
, and
- (BC2)
if l is odd, or if l is even,
for
. Maps satisfying the confinement conditions (BC1) and (BC2) at the boundary, will be called
quasi boundary-anchored maps for obvious reasons.
Lemma 3.4. Let be a quasi boundary-anchored map such that- (H1)
, and
- (H2)
(l odd) or (l even).
Then, for all ,- (a)
, , and is a maximum.
- (b)
(l odd) , , and is a maximum.
- (c)
(l even) , , and is a minimum.
Proof. (a) Suppose for all (BC1), and (H1). Then for . According to Lemma 3.2 (a) with , , and , we have and is a maximum. By induction it follows that and is a maximum for .
(b) Suppose l odd, for all (BC2), and (H2). Then for . According to Lemma 3.3 (a) with , , and , we have and (by H1) is a maximum. By induction it follows that and is a maximum for .
(c) Suppose l even, for all (BC2), and (H2). Then for . According to Lemma 3.3 (a) with , , and , we have and is a minimum. By induction it follows that and is a minimum for . ☐
Lastly, the next lemma is a kind of complementary result to Lemma 3.4.
Lemma 3.5. Let be a quasi boundary-anchored map such that- (H1)
, and
- (H2)
(l odd) or (l even).
Then, for all ,- (a)
, , and is a maximum.
- (b)
(l odd) , , and is a maximum.
- (c)
(l even) , , and is a minimum.
Proof. (a) Suppose
for all
(BC1), and
(H1). Then
(
i.e.,
) for all
, because
f is assumed to be strictly increasing in
[Equation (
3)]. Therefore,
for
. According to Lemma 3.2 (b) with
, we have
, and
is a maximum because
is a maximum [Equation (
6)] and
. By induction it follows that
and
is a maximum for
.
(b) Suppose
l odd,
for all
(BC2), and
(H2). Then
for any
, because
f is assumed to be strictly increasing in
and
(H1). Therefore,
for
. According to Lemma 3.3 (b) with
, we have
, and
is a maximum because
is a maximum [Equation (
6) with
l odd] and
. By induction it follows that
and
is a maximum for
.
(c) Suppose
l even,
for all
(BC2), and
(H2). Then
for any
, because
f is assumed to be strictly increasing in
. Therefore,
for
. According to Lemma 3.3 (b) with
, we have
, and
is a minimum because
is a minimum [Equation (
6) with
l even] and
(
odd). By induction it follows that
and
is a minimum for
. ☐
5. The Main Result
Given
, let
denote the
lap number of
, and
the
number of local extrema (or critical points) of
, with
. Since
is continuous and piecewise monotone, the laps are separated by critical points, hence the relation,
holds. In particular,
since
, the identity, is monotonically strictly increasing, and
Furthermore, let
,
, stand for the
number of interior simple zeros of ,
,
i.e., solutions of
(
), or (ii) solutions of
, with
, with
for
, and
(
). Geometrically
is the number of transversal intersections in the Cartesian plane
of the curve
and the straight line
, over the interval
. Note that
for all
i.
To streamline the notation in the forthcoming results, set
for
. In particular,
Lemma 5.1. Let . Then, for , Proof. For
, Equation (
22) spells out
on account of (
17) and (
21), which holds true [see (
18)].
For
, use the fact that
equals the number of sign changes of
. Then, Equation (
22) follows from the relation
. Note that the
x’s with
and
are counted only once (by
), since they are not simple zeros of
. ☐
From (
16) and (
22) we get
Addition of
for
(
) leads to
where
.
Consider fixed but otherwise arbitrary indices
and
. The following two observations are trivial: (i) the upper bound
of
corresponds to the case in which the graph of
crosses the
ith critical line
on every lap; (ii) the row
ν of the MM-table of
contains alternating maxima and minima,
i.e., alternating symbols
and
corresponding to the graph points, say,
and
, respectively. If
, then the curve
joining the corresponding extrema crosses the critical line
. If, otherwise,
, then one of the two symbols involved is necessarily a “bad” symbol, to wit: (i)
with
, so as the curve
does not cross the
ith critical line on the lap
, or (ii)
with
, so as the curve
does not cross either the
ith critical line on the same lap. Call
the set of
bad symbols or
types with respect to the
ith critical line. Moreover note that if a bad symbol appears on a column other than the
- or
-column, then the same conclusion concerning the zeros of
applies to the two laps of
left and right of corresponding extremum. And if a bad symbol appears on the
- and/or
-column, then there is no zero of
in
and/or
.
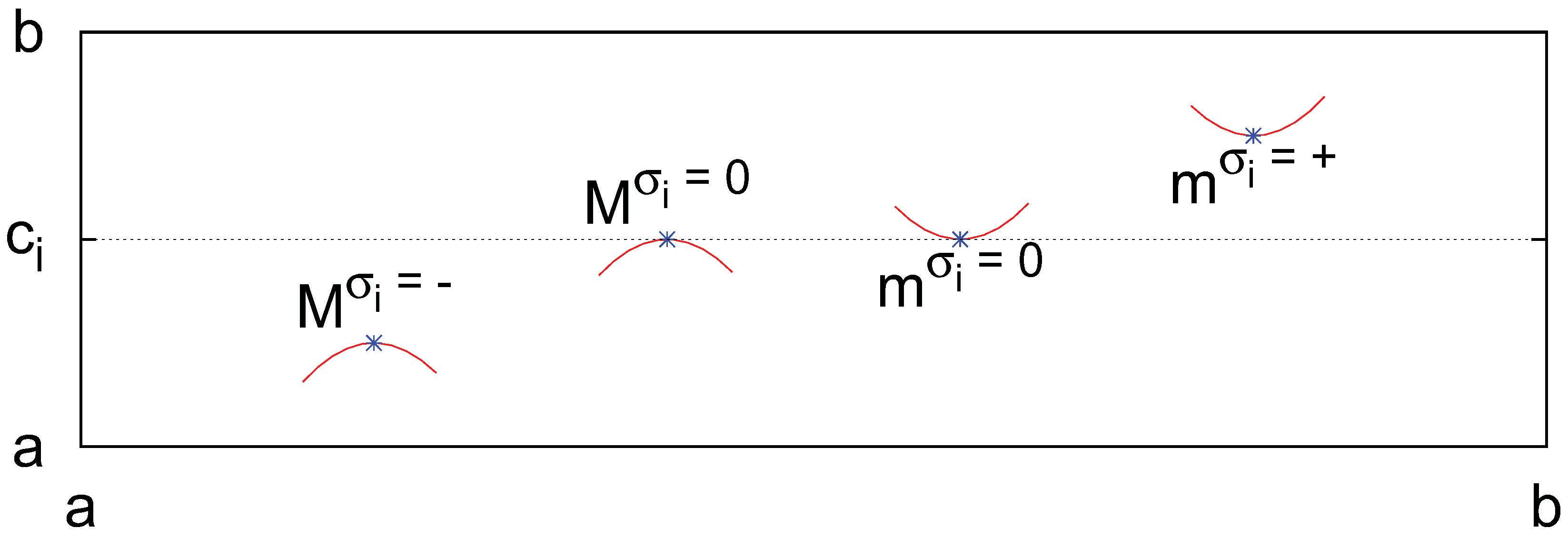
Figure 2 illustrates the geometrical meaning of a bad symbol
: The branches of the parabolic approximation to a local extrema
whose type is a bad symbol point away from the critical line
. It is easy to check that
For example, for
If
we say that
is a
good symbol with respect to the
ith critical line. Since there are
symbols
and
symbols
, the number of good symbols with respect to the
ith critical line is
.
Figure 2.
Geometrical meaning of the bad symbols (
25).
Figure 2.
Geometrical meaning of the bad symbols (
25).
Therefore, the equality is only possible if the row ν in the MM-table of contains only good symbols with respect to the critical line . Indeed, we have just seen that each bad symbol on row ν subtracts two simple zeros (solutions of , ) from . But that condition is not sufficient. It could also happen that the leftmost extremum is of good type, but has no zero in the interval because , i.e., the graph points and are both above or both below the critical line . Of course, a similar consideration holds for the rightmost extremum and too.
All these facts can be encapsulated in the relation
where
is the number of symbols from the bad set
and
Before using the previous results to formulate a recursive procedure to calculate the lap number , we need to relate the symbols on the - and -columns to the critical values and .
Remember that in the construction of the MM-table of
f, we may encounter two situations in the intervals
(a similar discussion holds for the intervals
).
- (S1)
If , for , and otherwise, then [Lemma 3.2 (a)], and we write down (if ) or (if ) on the -column, beginning at row ν. To address both possibilities in the present discussion, denote by the sequence on the -column (note if ).
- (S2)
On the other hand, suppose
for all
, and
(or
if
). In this case
[Lemma 3.2 (b)]. If again
for all
i, then
. In general, if this happens
τ consecutive times (
i.e., for
), then (i)
, and (ii) the leftmost extrema
are of type
, respectively (see
Table 2).
In order to accommodate all these possibilities in the notation,
will denote the
-entry in the MM-table of
f,
i.e., the symbol on the row
ν of the
-column. Analogously,
will designate the
-entry in the MM-table of
f. From (
27), (S1) and (S2), it follows
where
,
, and for
,
with
, and
. Here
[resp.
] are meant to be the smallest [resp. greatest] values of the index
i for which the corresponding inequalities hold, and
[resp.
] stands for a maximum [resp. minimum] of any signature. The functions
,
are recursively calculated as follows:
, and for
,
In the unimodal case (
), Equations (
28)–(
30) simplify to (
37)–(
38),
Section 6.
Example 5.2. (Cont’d) Let us illustrate the above formulas with the bimodal map (15) considered in Example 4.2. The following values in Table 4 can be calculated with data from Table 2 and Table 3.
Table 4.
Values of
and
for the bimodal map (
15).
Table 4.
Values of and for the bimodal map (15).
| ν | | | | | | | | |
| 1 | 1 | 1 | 0 | 0 | 2 | 1 | 0 | 1 |
| 2 | 1 | 1 | 1 | 0 | 2 | 2 | 1 | 0 |
| 3 | 2 | 1 | 0 | 1 | 2 | 1 | 0 | 0 |
| 4 | 2 | 2 | 1 | 0 | 2 | 1 | 0 | 1 |
Let us understand the geometrical meaning of the values of, say, row in view of the MM-table of f, Table 2 and Table 3. and because the leftmost column beginning at or intersecting the row (the -column) has the symbol on row .
because , i.e.,
it is a bad symbol with respect to the critical line (so the lack of a zero of in the interval is already accounted for in the term of Equation (26)). On the other hand, because , i.e.,
it is a good symbol with respect to the critical line but (see the second sign on row of the -column), so has no zero in the interval . and because the rightmost column beginning at or intersecting the row (i.e., the -column) has the symbol on row .
because . On the other hand, because is a good symbol with respect to the critical line and, furthermore, (see the second sign on row of -column), so has one zero in the interval .
We can now derive the main result of this paper.
Theorem 5.3. Let , , be the MMSs of , and , the 0-1 sequences obtained from (28)–(30). SetThen the lap number of , , is given bywhere (20), (19), and for , Proof. Addition of
(
23) for
[
(
17)], yields the expression (
31).
Let
be the number of
sequences that begin at row
ν on the MM-table of
f, and, as before, let
be the number of symbols of
on row
ν. Then,
By Lemma 3.1,
for
. Since
and
(
19),
, we conclude that
for
as well. Upon substitution of this equality and Equation (
26) into Equation (
33), we obtain
Finally, use (
24) to derive the expression (
32). ☐
In view of (
31), Equation (
32) can be shortened to
In particular,
, and
, hence
since
for every
k (
19). Therefore
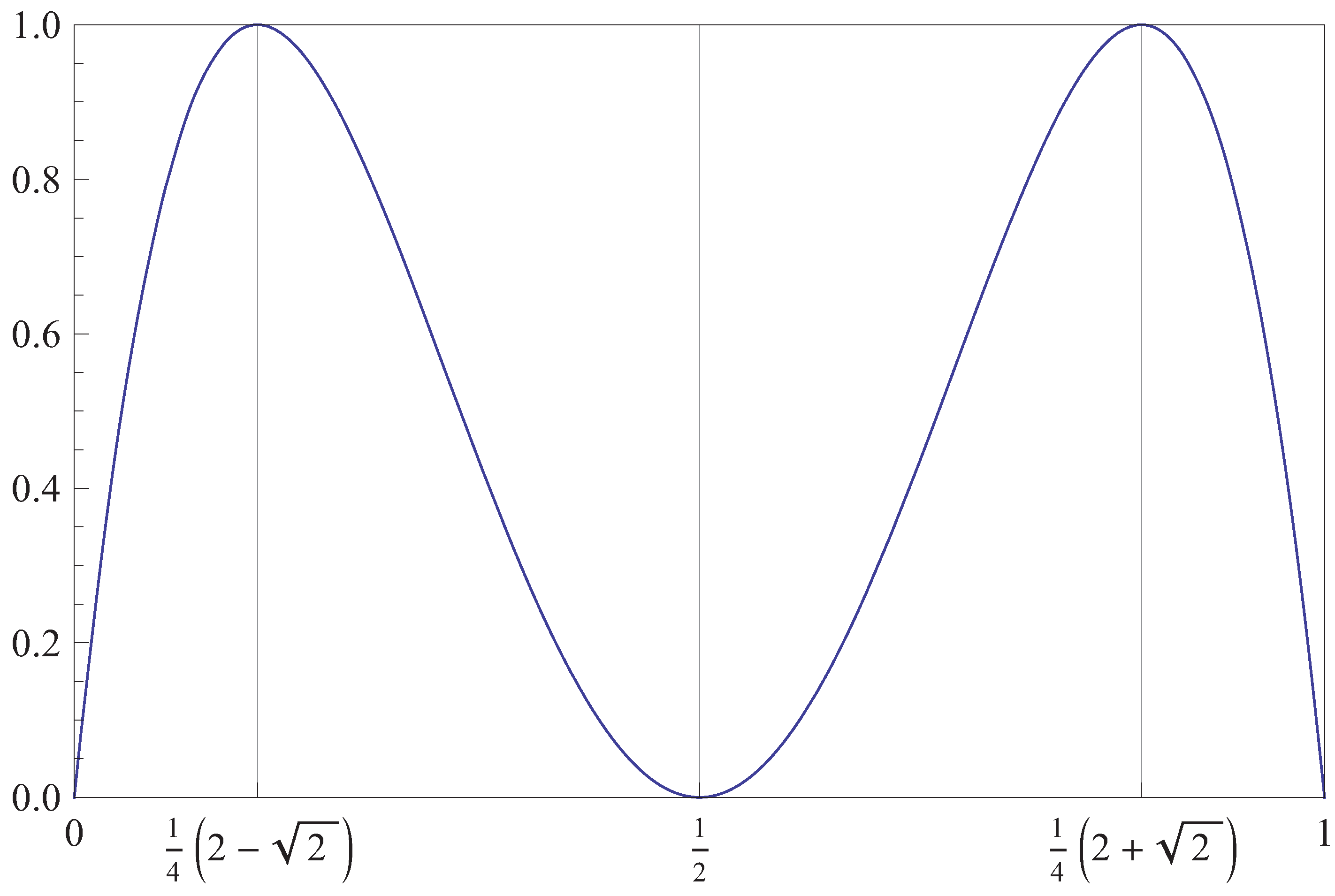
Example 5.4. (Cont’d) Once again let f be the cubic map (15) restricted to the interval . With the information provided in Example 5.2. and the formulas of Theorem 5.3., we get the following results in Table 5.
Table 5.
Lap numbers of the first four iterates of the map (
15).
Table 5.
Lap numbers of the first four iterates of the map (15).
| ν | | | | | | |
| 1 | | ∅ | 1 | 2 | 3 | 3 |
| 2 | | | 0 | 4 | 4 | 6 |
| 3 | | | 0 | 5 | 5 | 10 |
| 4 | | | 0 | 10 | 10 | 15 |
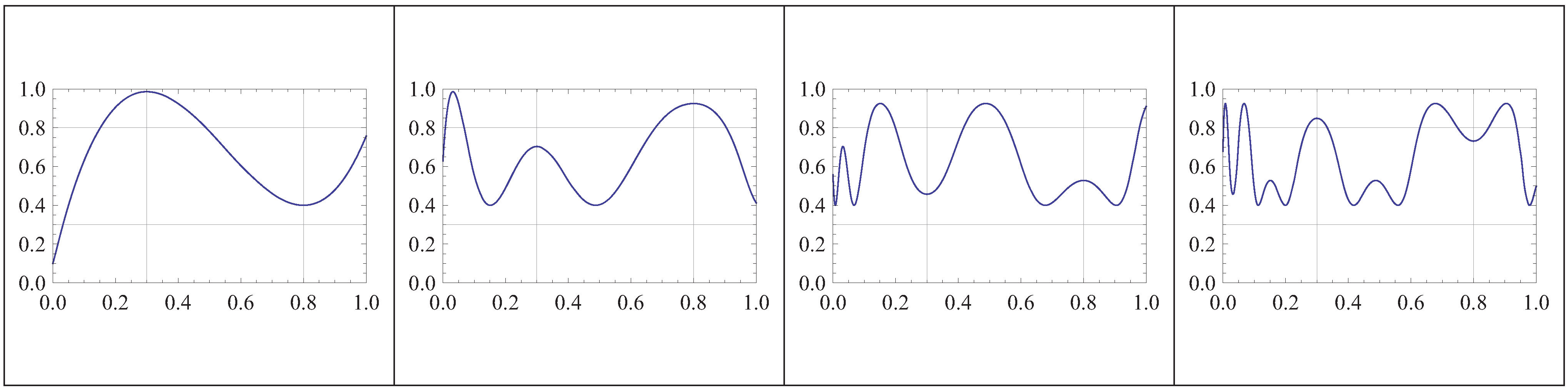
For instance,hence, . Finally, Equation (31),All these numerical results can be checked at Figure 1. Two comments are in order at this point.
First, the computation scheme (
31) and (
32) for the lap number
only involves two ingredients: The first
n symbols of the
l MMSs of
f, and the first
n signatures of the itineraries of both endpoints.
Secondly, the number of summations in (
31) and (
32) for the computation of
is
. Moreover, this scheme is almost recursive. Indeed the value of
is determined by the values of
,
, ...,
along with the values of
, which have to be calculated anew for each
ν. Thus, in the particular case
for all
and
, the algorithm is not only much simpler but fully recursive.
6. Special Cases
The next two lemmas provide sufficient conditions for all
’s and
’s in (
32) to vanish. Remember that a map is called quasi boundary-anchored if it satisfies the boundary conditions (BC1) and (BC2) of
Section 3. The most prominent instance of quasi boundary-anchored maps are the boundary-anchored ones.
Lemma 6.1. Let be a quasi boundary-anchored map such that- (H1)
, and
- (H2)
(l odd) or (l even).
Then , , , , andfor all , . Proof. From Lemma 3.4 (a)–(c) and their corresponding proofs, we conclude the following results.
(a)
,
, and
[see (
25)] for all
,
(b)
,
, and
for all
,
,
l odd.
(c)
,
, and
for all
,
,
l even.
In sum,
for all
, and
. From the definition (
28) it follows that all the
’s and
’s vanish. ☐
Lemma 3.5 provides a second scenario for the vanishing of all
’s and
’s.
Lemma 6.2. Let be a quasi boundary-anchored map such that- (H1)
, and
- (H2)
(l odd) or (l even).
Then , , , , andfor all , . Proof. From Lemma 3.5 (a)–(c) and their corresponding proofs, we conclude the following results.
(a)
,
, and
[check (
25)] for all
,
(b)
,
, and
for all
,
,
l odd.
(c)
,
, and
for all
,
,
l even.
In sum,
for all
, and
. From the definition (
28) it follows that all the
’s and
’s vanish. ☐
Another nice simplification occurs when the map is unimodal because then
. To make the notation uniform, set
,
,
,
, and
in the unimodal case. Furthermore, for
Equations (
28)–(
30) get abridged to
where
,
, and for
,
Note that Equation (
29) boils down to
for any
(as it should, since unimodal maps have only one MMS).
Theorem 6.3 ([
16]).
Let be the MMS of , , andIf , , are the 0-1 sequences obtained from (37)–(38), thenwhere and (17). Proof. In the unimodal case, Equation (
35) reads
Substitution of
(
23) with
and
into (
40), produces (
39). ☐
Denote by
c the only critical point
of
. Application of Lemma 6.1 (
) and Lemma 6.2 (
) to Theorem 6.3 yields a further simplification.
Corollary 6.4 ([
13,
15]).
Let be the MMS of a quasi boundary-anchored map (i.e.,
for all ). Then,for . Alternatively, one can set
and
in (
31)–(
32) to derive, under the assumptions of Corollary 6.4,
where
[see (
17)], and
for
.
As a quick check, observe that if
, then
, hence
. In this case, (
41) collapses to
. Likewise, (
43) provides
for all
, thus
by (
42).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}