1. Introduction
As a fundamental way of characterizing the condition of a mechanical system, diagnostics should fulfill the requirement of being able to detect all possible faults. As a defective component may run for certain time before it is totally damaged, the early detection of machinery fault and making corresponding maintenance arrangements have great impact on the reduction of unexpected shutdown and operation cost.
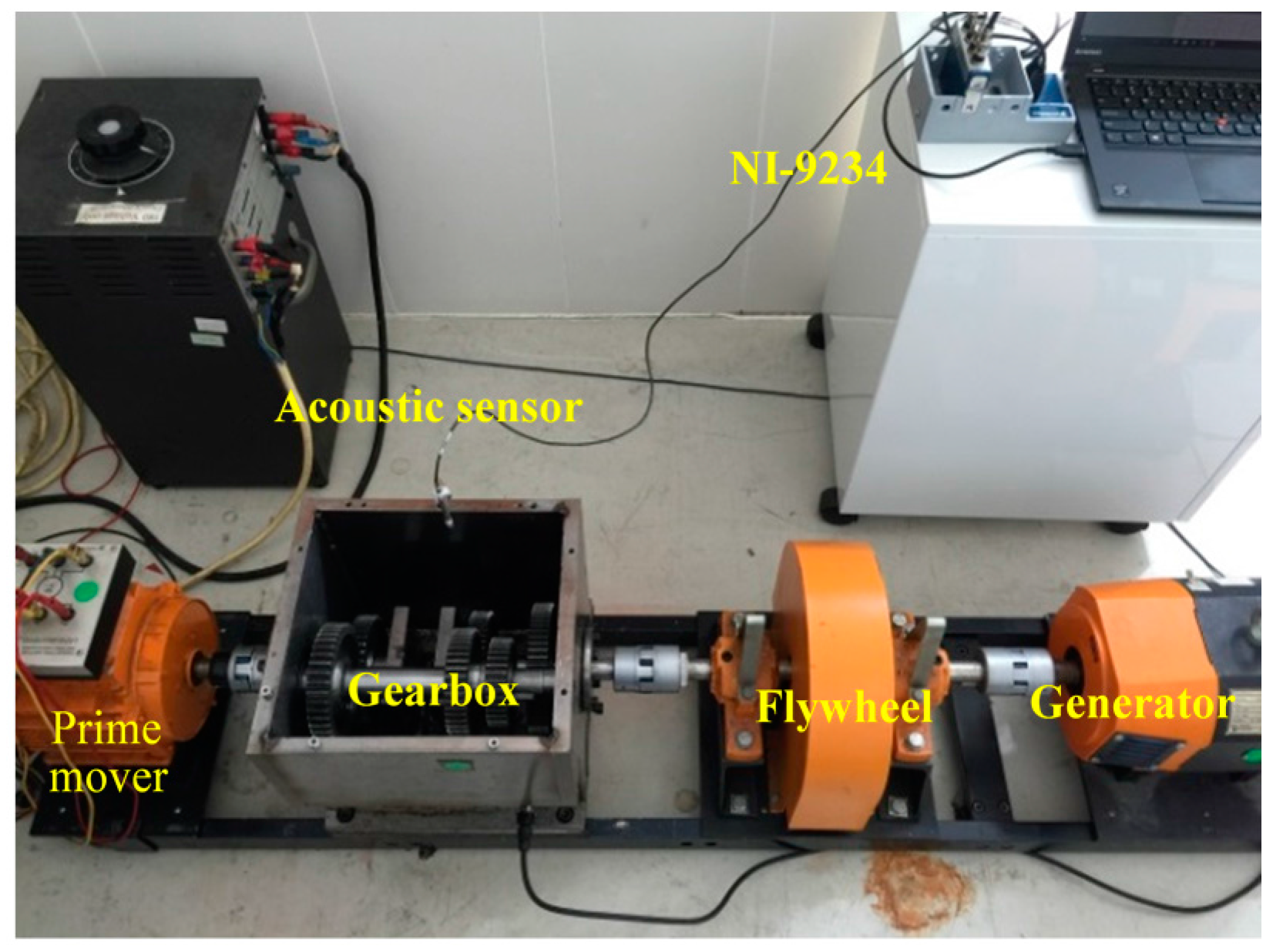
The condition monitoring process includes the acquisition of information, signal processing and pattern recognition. Various signal types, including vibrations, acoustic signals, and temperature, have been used for fault diagnosis. Considering the advantages of acoustic signals, there has been a tendency to apply acoustic signal analysis to machinery fault detection and diagnosis [
1]. Firstly, acoustic signals are non-directional which means that one acoustic sensor can satisfy the data collection requirements, while signals on three axes are needed to be considered if using a vibration sensor. Secondly, acoustic signals are relatively independent of structural resonances [
1]. Thirdly, the high sensitivity of acoustic signals [
2] provides an opportunity to identify faults at an early stage [
3]. What comes along with the benefits of acoustic signals are their problems of low signal to noise ratio (S/N) and high computational cost. As acoustic sensors can capture a much broader range of frequencies than vibration accelerometers, the S/N of acoustic signals is generally lower than that of vibrations. The high sampling frequency of acoustic signal which results from the high frequency of acoustic signals also make it undesirable to use long monitoring times because of the high computational cost, making the S/N even lower. It is thus imperative to adapt methods which reduce the computational time and increase the S/N when using longer monitoring times.
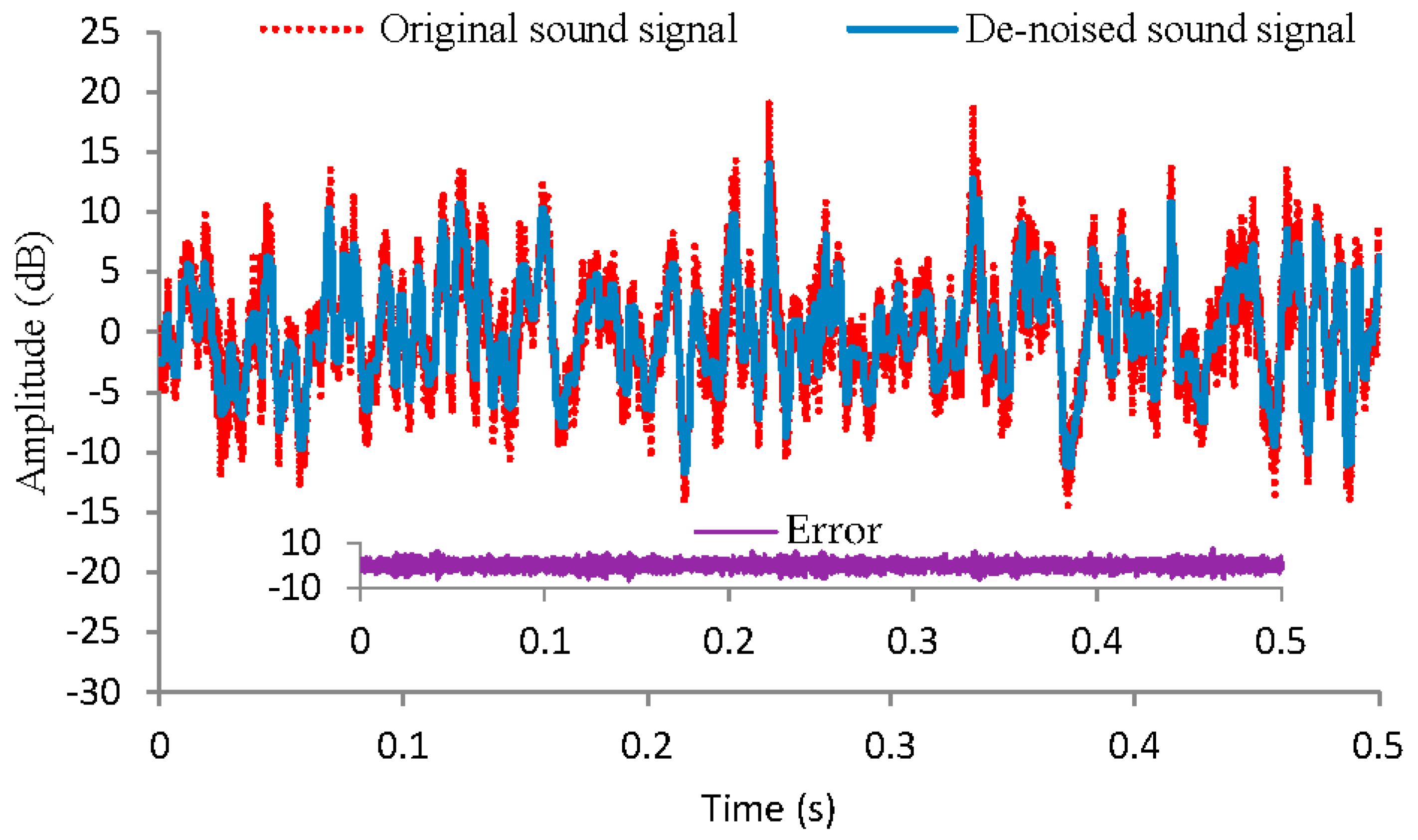
To overcome these problems, effective acoustic signal de-nosing techniques and suitable feature extraction methods are adopted. In this study, a widely used method, discrete wavelet transform (DWT) using soft threshold [
4], is adopted. In addition, some time-frequency analysis methods, including wavelet transorm and empirical mode decomposition (EMD), are adopted for fault feature extraction from rotating machinery signals [
5]. The wavelet transform is the most dominant method used nowadays [
6], but it still has many defects to overcome. First, as a wavelet transform is in fact a windowed Fourier transform, energy leakage will occur during the signal processing. Second, once the decomposition scales are determined, the wavelet transform result is the signal under a certain frequency band. In other words, a wavelet transform is not a self-adaptive signal processing method by nature [
7]. EMD has been proposed as a time-frequency signal processing technique to deal with non-linear and non-stationary problems as in this application [
8]. It decomposes a complicated signal into a series of intrinsic mode functions (IMFs) which not only relate to the sampling frequency, but change with the signal itself. Hence, it is a kind of adaptive signal processing technique for non-linear and non-stationary signals. However, the major disadvantage of EMD is the issue of mode mixing. To overcome the issue, an improved EMD method, ensemble empirical mode decomposition (EEMD), was recently proposed by Wu and Huang [
9]. EEMD is a noise-assisted data analysis method that involves adding finite white noise to the investigated signal to eliminate the mode mixing problem. Compared with the aforementioned signal processing methods, EEMD is proposed as a suitable time-frequency analysis technique to process acoustic signals in this application. Even though EEMD decomposes the signals into IMFs containing the local features of a signal, however, the data size of IMF is the same as that of the raw data, which is usually very big. Therefore, a proper feature selection method should be also considered in the feature extraction phase to determine representative features from IMFs so as to reduce the input dimensions of the classifier.
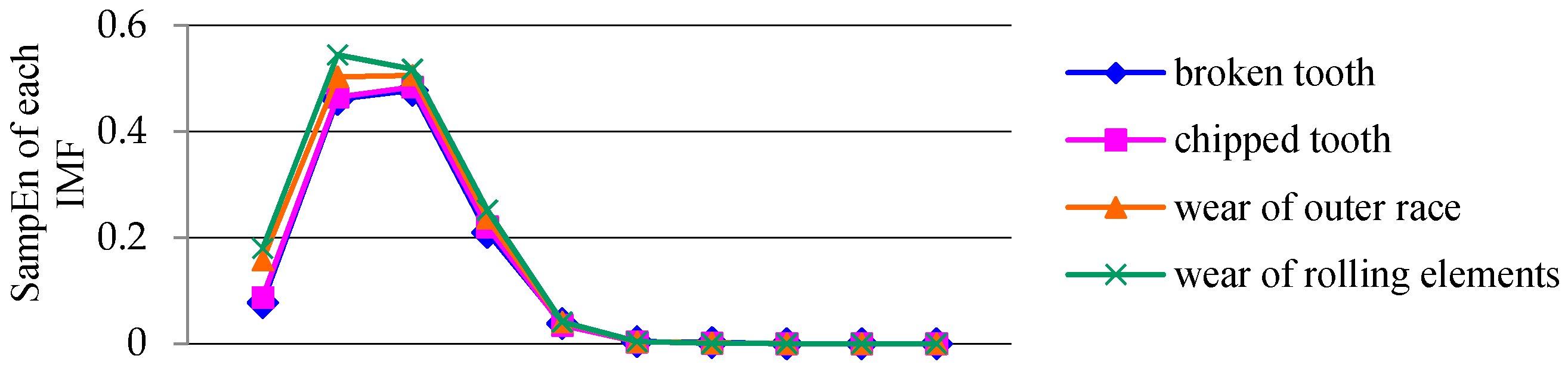
In the previous literature, both the sample entropy (SampEn) [
10,
11] and singular value decomposition (SVD) [
12] methods are adopted to extract the representative characteristics from IMFs. Generally, different indicators can be used to describe different failures. For example, a broken tooth in a gear has a relatively regular acoustic signal because it is periodic, so the outcome of SampEn is relatively low, which is very similar to the outcome of a periodic fault such as chipped tooth because as an indicator SampEn mainly describes the regularity not the detailed impulse. This makes it easier to produce a wrong classification. On the contrary, SVD can easily solve the problem by rendering the singular value matrix of the fault signal which can represent the periodic fault information adequately. As for a non-periodic signal such as outer race wear in a bearing, the signal is very unpredictable as its regularity is very low. In this case, the performance of SVD is worse than SampEn which can depict the fault properly by rendering the extent of its irregularity. A hybrid of the two approaches meets the needs of fault classification with high accuracy. In this paper, the authors propose a meritorious hybrid of SampEn and SVD, which are based on EEMD and assisted by the statistical features of the acoustic signals, that dramatically reduces the dimension of IMFs, allowing taking all meaningful IMFs into account and the use of long monitoring times, without increasing the computational expense, and at the same time, enhancing the classification accuracy to a considerable extent. After extracting the features based on SampEn and SVD, the extracted feature vectors are adopted to execute a pattern recognition algorithm.
Neural network-based monitoring systems have been proposed [
13,
14,
15]. However, neural network (NN) classifiers have many limitations, including local minima problems, being time-consuming, and the risk of over-fitting. To date, researchers have already applied support vector machines (SVM) to engineering diagnosis problems [
16,
17], and have shown that SVM is superior to traditional NNs [
18]. The major advantages of SVM are its global optimum and a higher generalization capability. Considering that there are more than two fault types always exist in a machinery system, it is necessary to find a suitable probabilistic classifier which can output the probability rank of all failures. According to the rank, the other possible faults can be traced when the prediction result is not right [
19]. The probabilistic neural network (PNN) was proposed as a probabilistic classifier for multi-label classification [
20]. However, with PNN it is difficult to deal with the issue of large-scale data such as the multiple acoustic signal problem presented in this paper. Recently, a probabilistic classifier, relevance vector machine (RVM), was proposed by Widodo
et al. [
21] and Tipping [
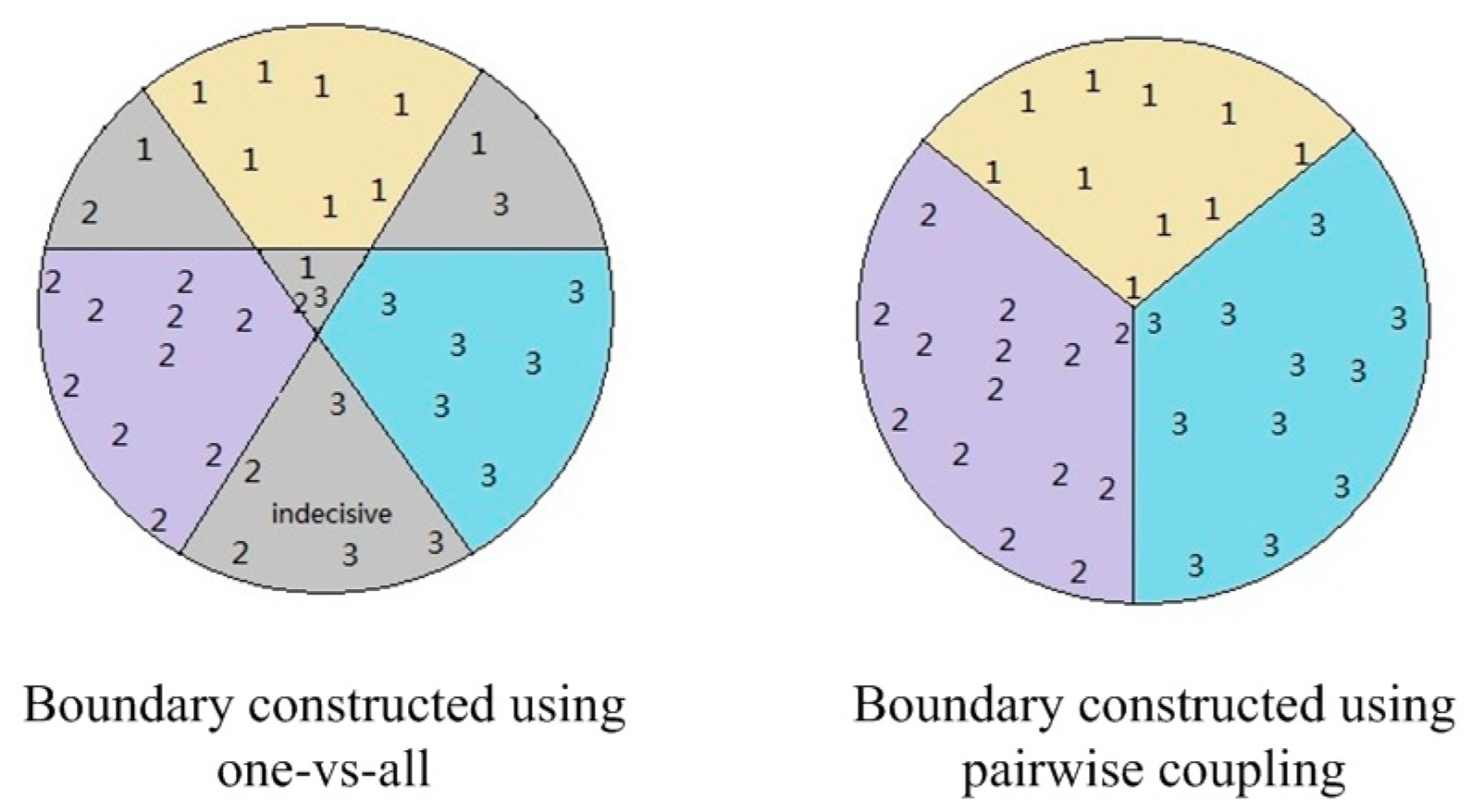
22] to deal with fault diagnosis of low speed bearings. To deal with the issue of multi-class classification, RVM is adopted in this application. A one-
vs-all strategy is usually adopted to overcome the multi-class classification problem. However, this strategy was verified to produce a large indecision region [
23,
24]. The pairwise coupling strategy, one-
vs-one, is introduced into RVM to overcome the drawback, leading to the concept of a pairwise-coupled relevance vector machine (PCRVM). Since the correlation between each pair of faults is considered by the pairwise coupling strategy, a more accurate estimation of the probability of the fault signal can be achieved. A detailed explanation of the advantages of the pairwise coupling strategy is presented in
Section 2.3.
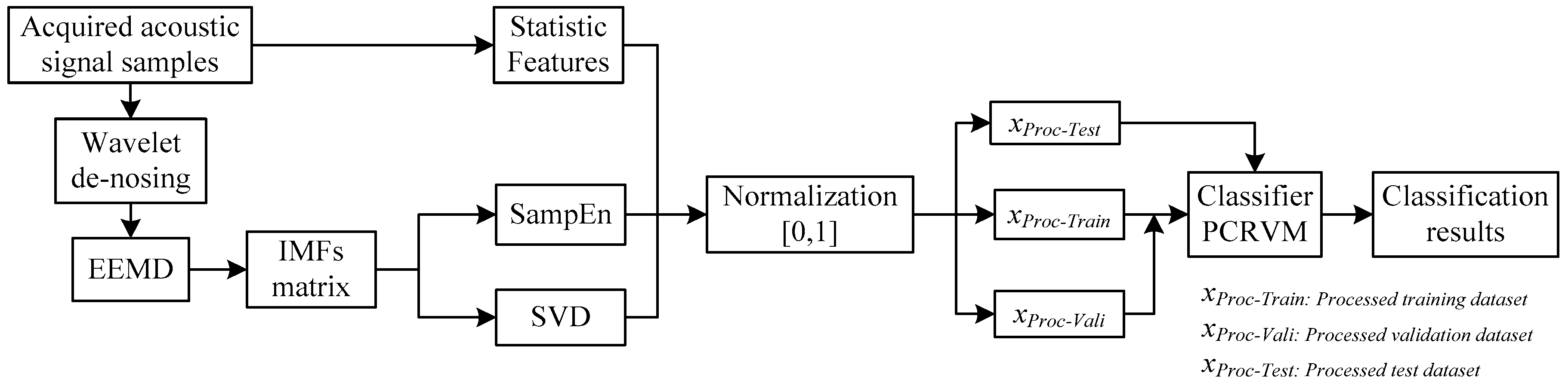
To summarize, a framework combining feature extraction (EEMD based SampEn and SVD), which is assisted by statistical features, and PCRVM is proposed for fault diagnosis. The original features of the work presented in this paper are summarized below:
It is the new research that analyzes the properties of feature extraction using EEMD+SampEn, which is extremely effective for dealing with irregular faults while it can always improve the overall performance of fault diagnosis for all types of signals.
It is the first example in the literature that observes the suitable application domain of EEMD+SVD method, which is sensitive for periodic faults and will not downgrade the classification accuracy for irregular faults.
The proposed EEMD-based hybrid signal processing method, combined with SF, SampEn and SVD, provides a new and robust solution to improve the general performance of feature extraction and fault diagnosis systems for various kinds of signals.
The proposed fault diagnosis framework, using the hybrid feature extraction module and the probabilistic classifier, pairwise-coupled relevance vector machine, can achieve a high diagnostic efficiency for simultaneous faults.
5. Conclusions
Fault diagnosis has been well recognized as a promising technology that can greatly enhance the productivity and engineering management effectiveness. In this study, acoustic signals are adopted as input signals for its pleasing high sensitivity in transmission of working conditions of machinery. To overcome the shortcomings in acoustic signals processing in terms of low S/N ratio and high data acquisition frequency requirement, we proposes a novel acoustic signal denosing and feature extraction method with compensational sensitivities for different categories of faults. EEMD is selected as the fundamental acoustic signal decomposition module without mode mixing effects. For feature extraction indicators, SampEn is sensitive to irregular faults while SVD is an ideal condition indicator of periodic signals. Each of them is sensitive to the corresponding intrinsic properties of signals. The compensation effect is thus utilized by proposing a novel hybrid EEMD based SampEn and SVD module to enhance the classification accuracy of both periodic and irregular faults. The hybrid signal processing method could both reduce the computational cost and enhance the S/N level. Various combinations of EEMD, SampEn, SVD, and SF have been investigated in the experiments to figure out the characteristics of each method and identify the best combination. The experimental versification has demonstrated that the proposed feature extraction module could always improve the generalization performance in heterogeneous faults diagnosis and do not contradict each other or degrade the individual sensitivity of feature extraction. A new fault diagnosis framework that integrates the hybrid signal processor with a probabilistic classifier, pairwise-coupled relevance vector machine (PCRVM), is proposed to identify multiple faults with potential concurrent effect. The proposed framework has achieved the best performance over other 6 benchmarking feature extraction methods.
In this study, although both periodic and irregular faults can be detected effectively, it will be our future work to consider how to further increase the diagnosis accuracy for faults in same category, especially for faults with irregular signals.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}