As the order of the local sub-group symmetry goes down, the degeneracy and complexity of the rotational cluster must increase. Oh⊃C2v clusters are 12 fold degenerate and come in 4 cluster species. Matrices describing this system are larger, but O⊃C2 will show many of the same effects. To actually resolve the doubled T1 or T2 triplets of O⊃C2 requires distinguishing the u and g versions of each. The C2 clusters are 12 fold degenerate, but they are also easily displayed.
8.1.1. Local Sub-Group Tunneling Matrices and Their Inverse
Table 13 can be further broken apart to demonstrate how one can create an automated process to evaluate the tunneling splittings for
O⊃
C2 local-symmetry structures. What will result is a transformation between cluster-splitting energy and tunneling parameters. The inverse of this transformation is also easily defined.
Equation (131) produces
Table 13, but even after combining splittings from each subclass, repetition exists. We show the two steps to convert
Table 13 into the transformation matrix just described. First we assume that only
nm levels may interact with themselves, e.g., that a 1
2 cluster may not interact with a 0
2 cluster. Second we recognize that only half of the subclasses are needed to fully define the possible splittings, the others simply repeat the same information.
Table 13 shows this for the 0
2 cluster. Looking at the
A1 level in the 0
2 cluster, one can see that the subclasses
1, rn, ρn make a vector {1
, 4
, 4
, 2
, 1} while the
Rn, in subclasses make a vector {4
, 2
, 4
, 1
, 1}. These vectors are reordered versions of each other. Thus only one is needed. The
A2 level in the 1
2 cluster shows the same similarity, but the
Rn, in now contain a negative sign.
By using only the minimum number of splitting parameters and including only a single cluster gives a condensed version of
Table 13 that acts as a transformation that inputs symmetry-based tunneling values and outputs energy levels. Such a table is shown in
Table 14. A simple inverse of the matrix in
Table 14 will produce the transformation giving tunneling parameters for a given set of cluster energy splittings, as shown in
Table 15.
There are multiple ways to use
Tables 14 and
15. Among the most useful is to use the columns of
Table 14 as a predictor of possible splitting patterns. Using the inverse matrix to find spectroscopic tunneling parameters from cluster splittings may also become a useful and automated process.
An example demonstrates this process for a model (4
, 6)-octahedral-Hecht spherical-top Hamiltonian
Equation (134) with varying spectroscopic parameters. The terms
T[4] and
T[6] model rotational distortions written in an octahedral basis of fourth and sixth order respectively in
J. The parameter
θ is varied to explore the different relative contributions of
T[4] and
T[6] while keeping them normalized. Because
T[4] and
T[6] each have octahedral symmetry,
Equation (134) represents all possible octahedral pure rotational Hamiltonians up to sixth order.
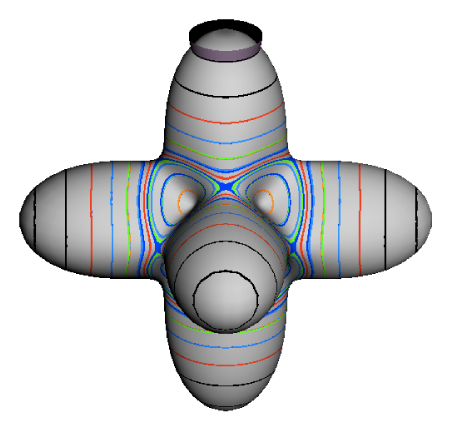
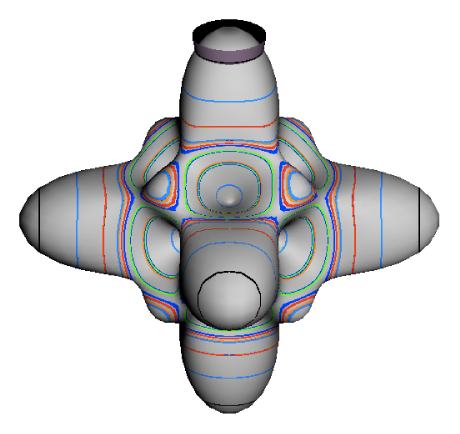
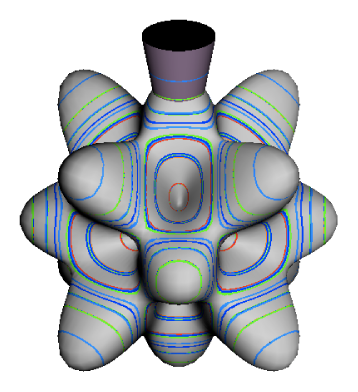
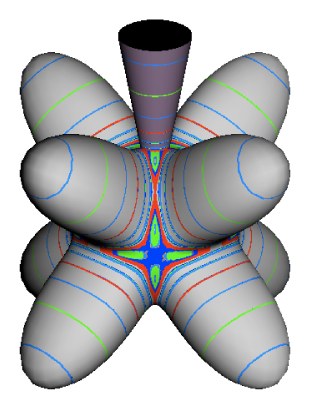
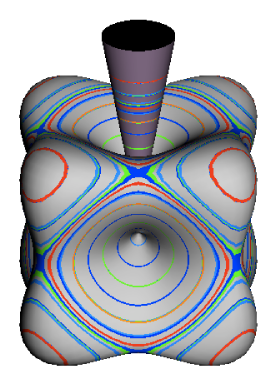
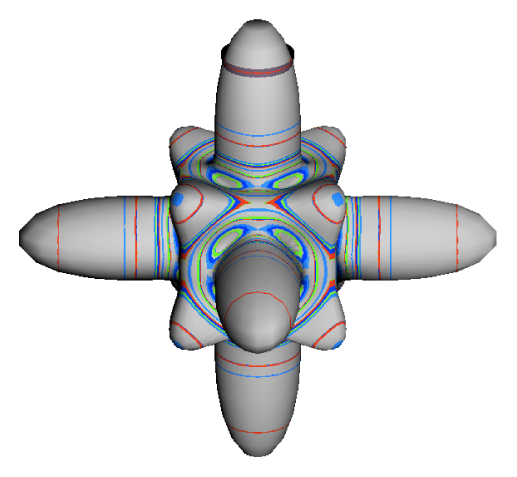
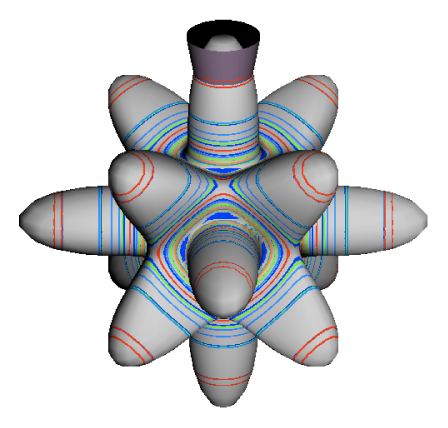
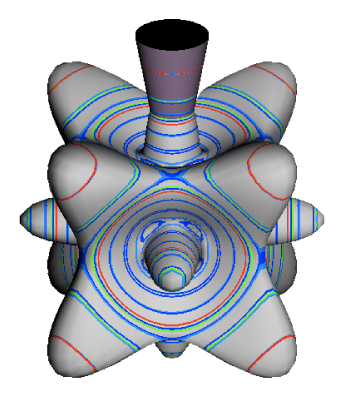
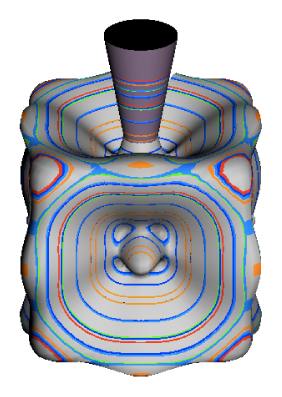
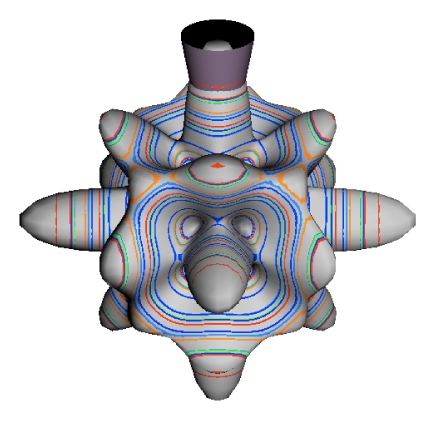
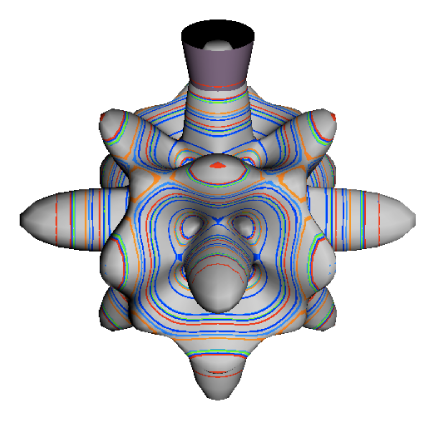
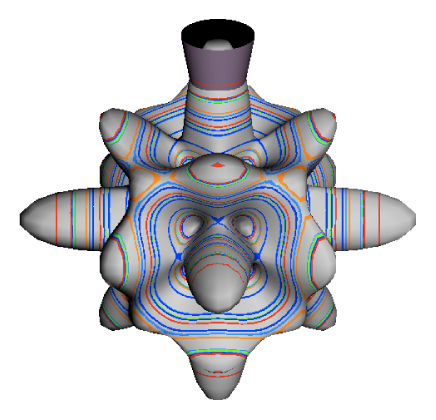
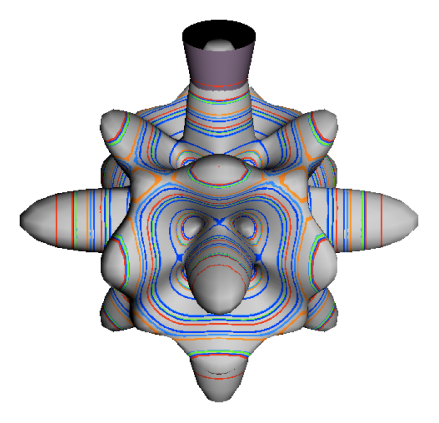
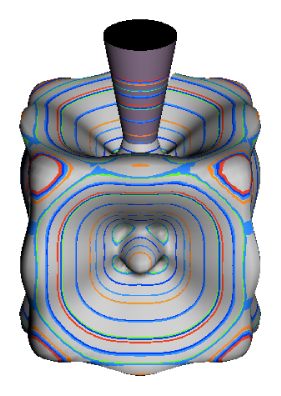
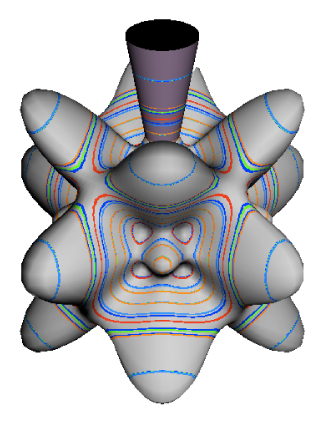
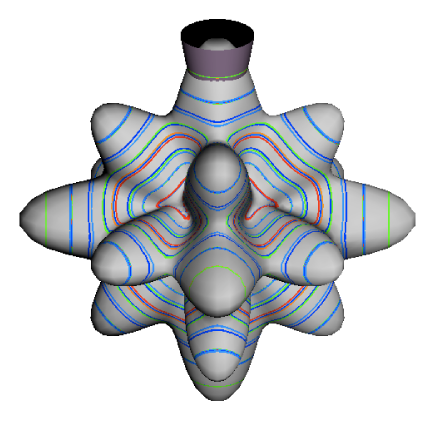
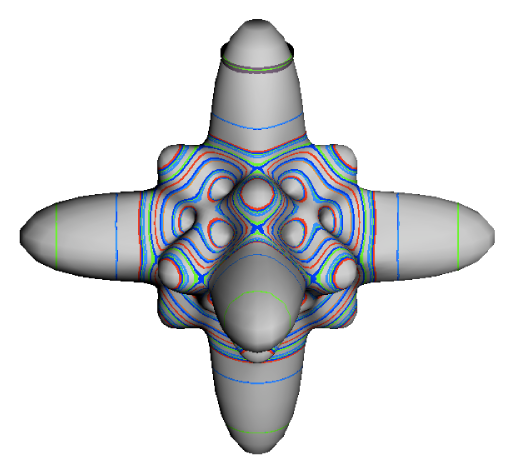
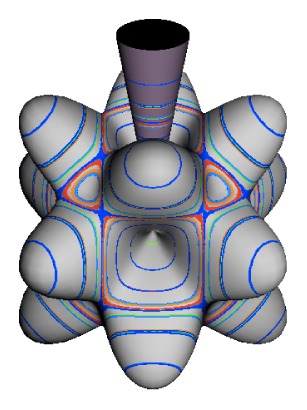
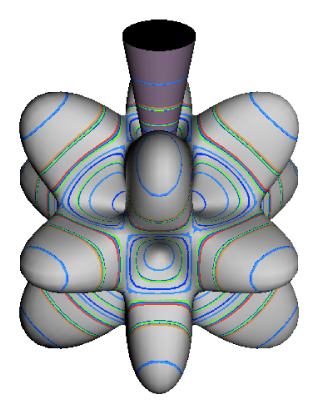
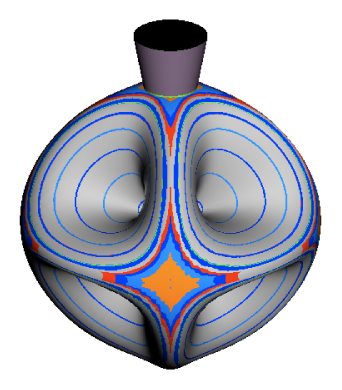
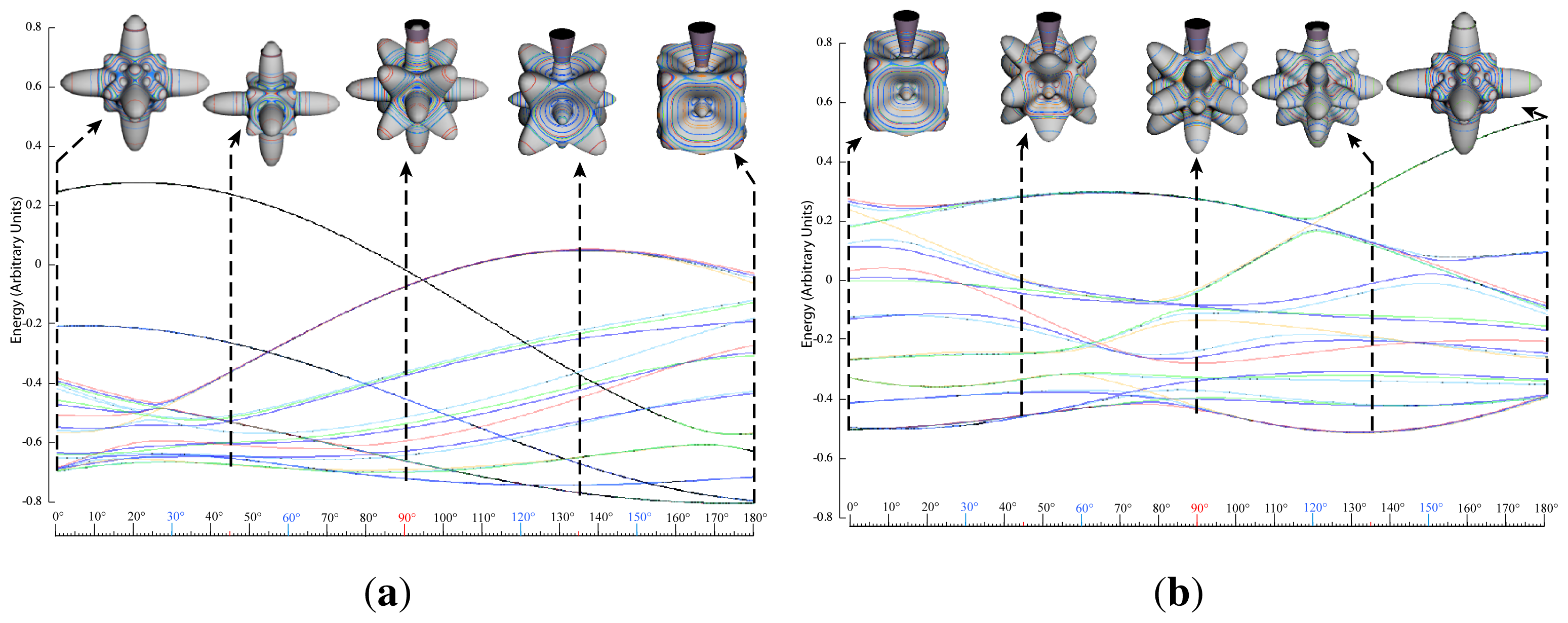
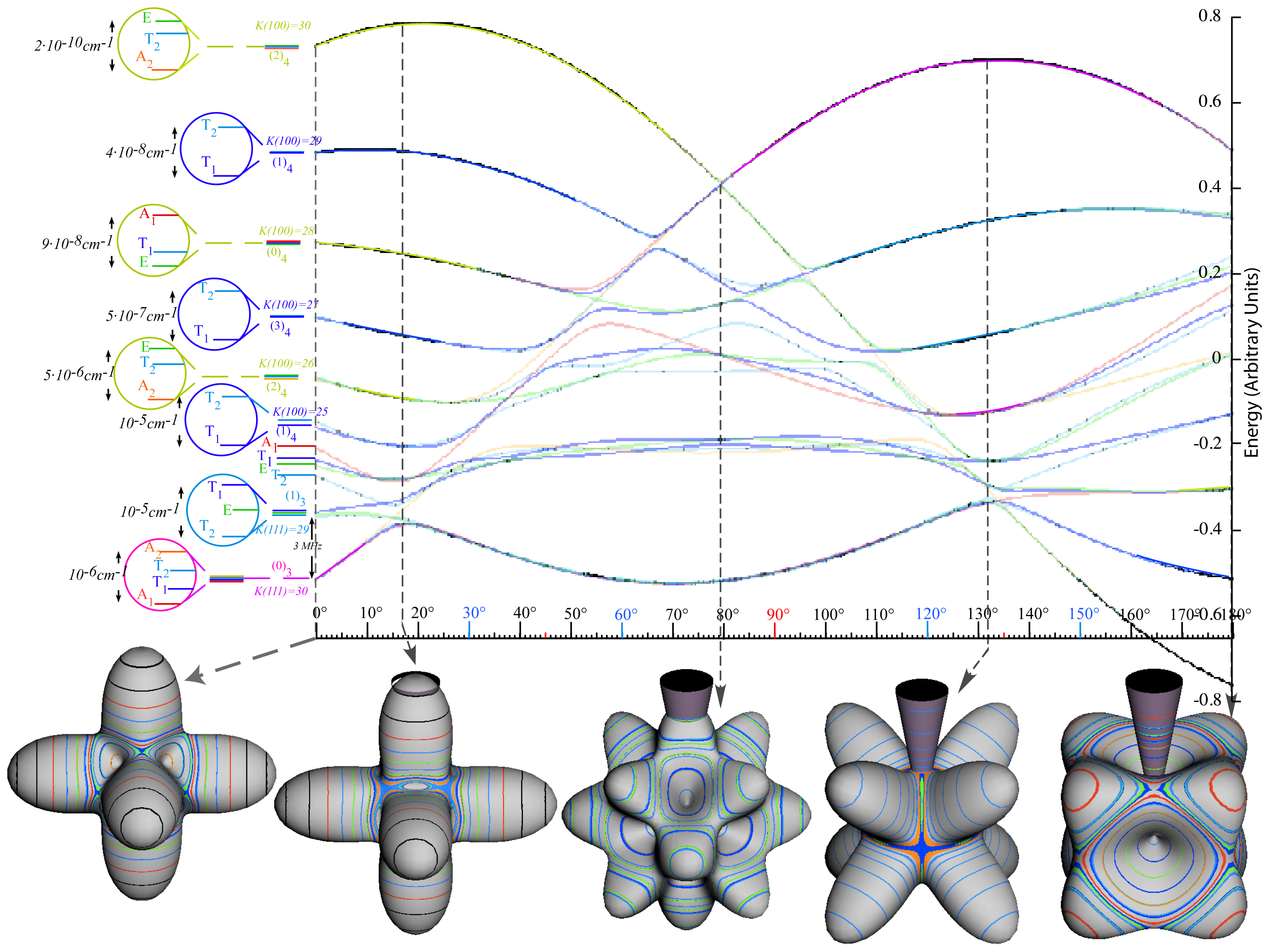
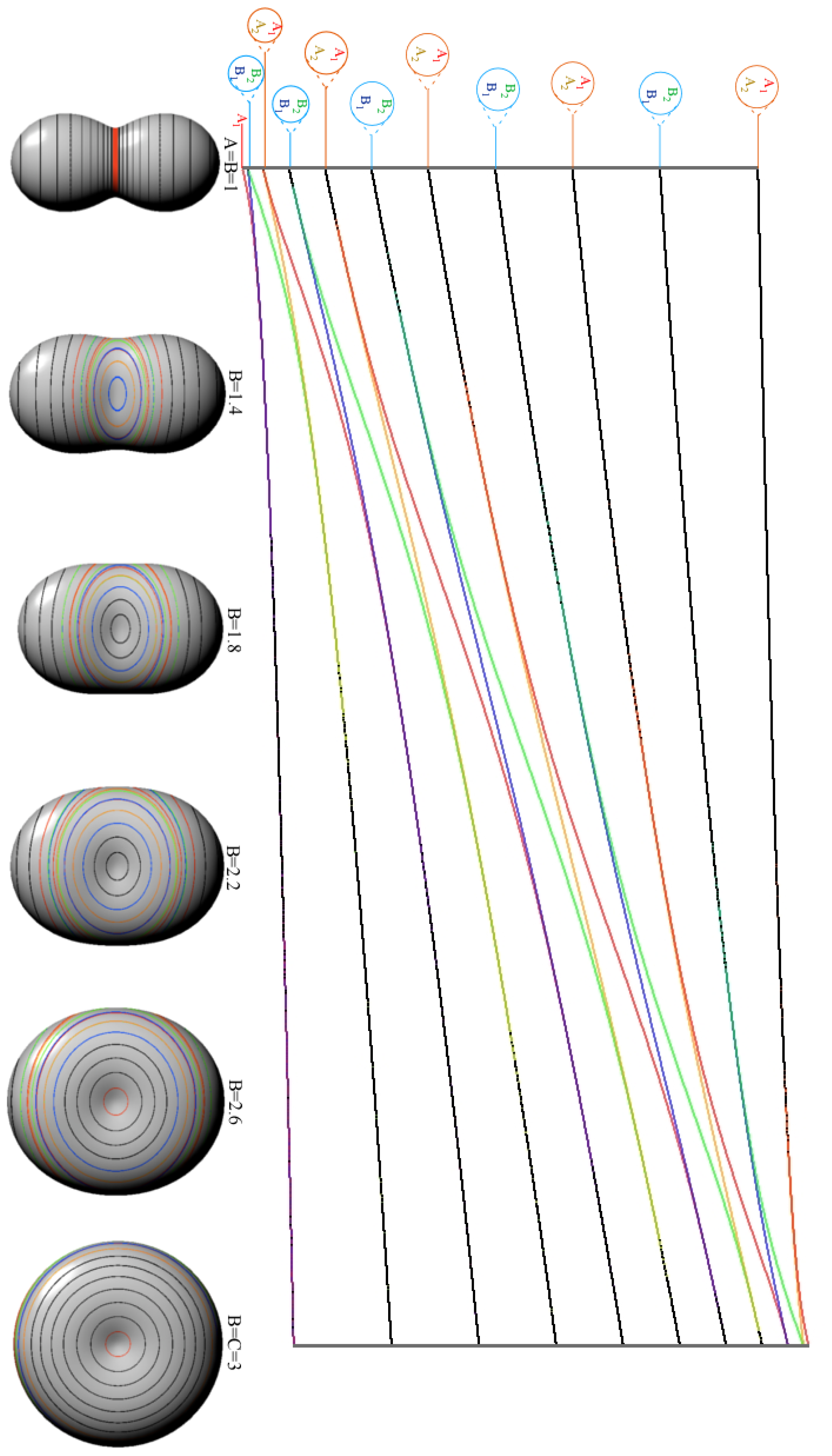
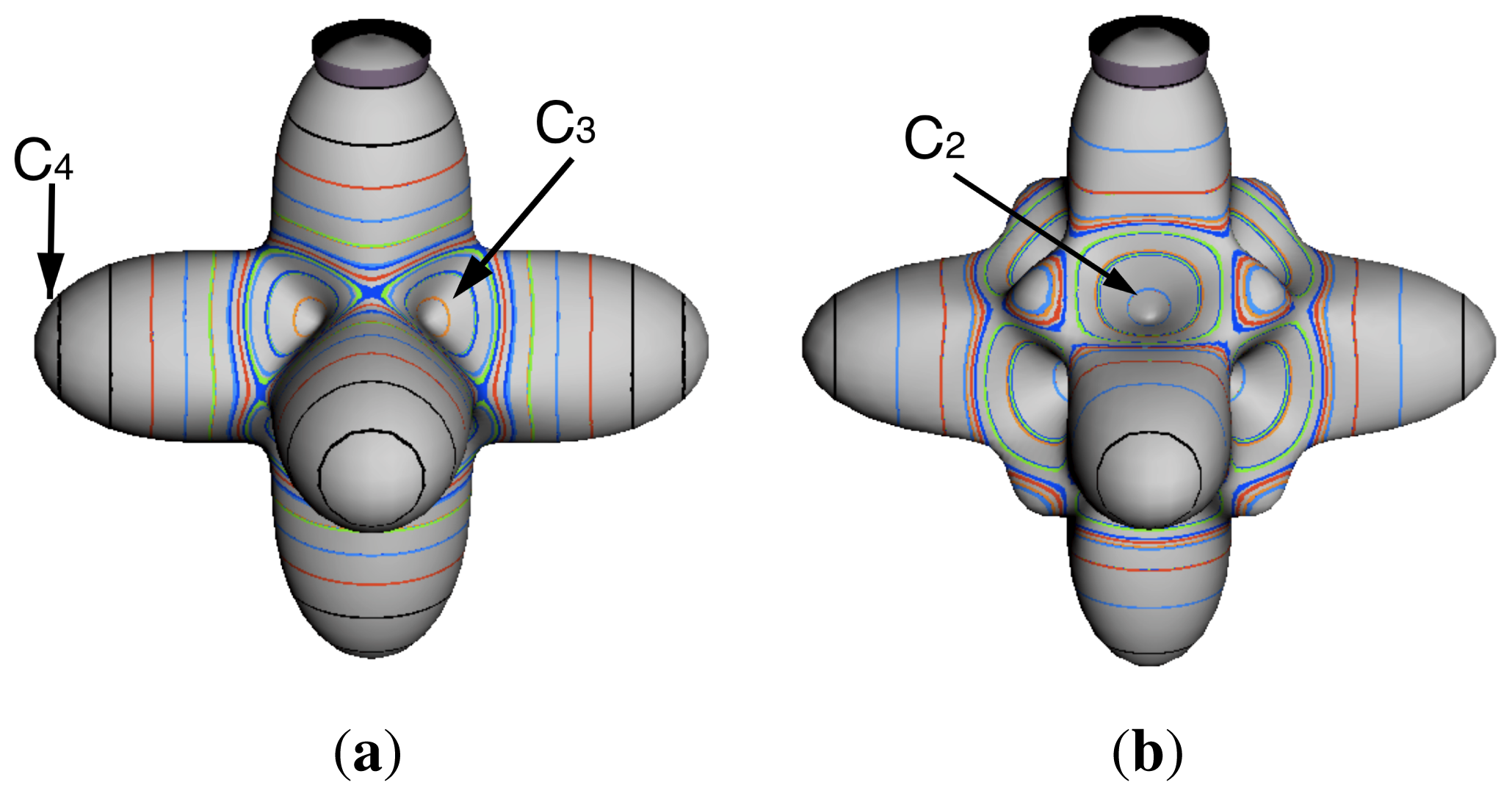
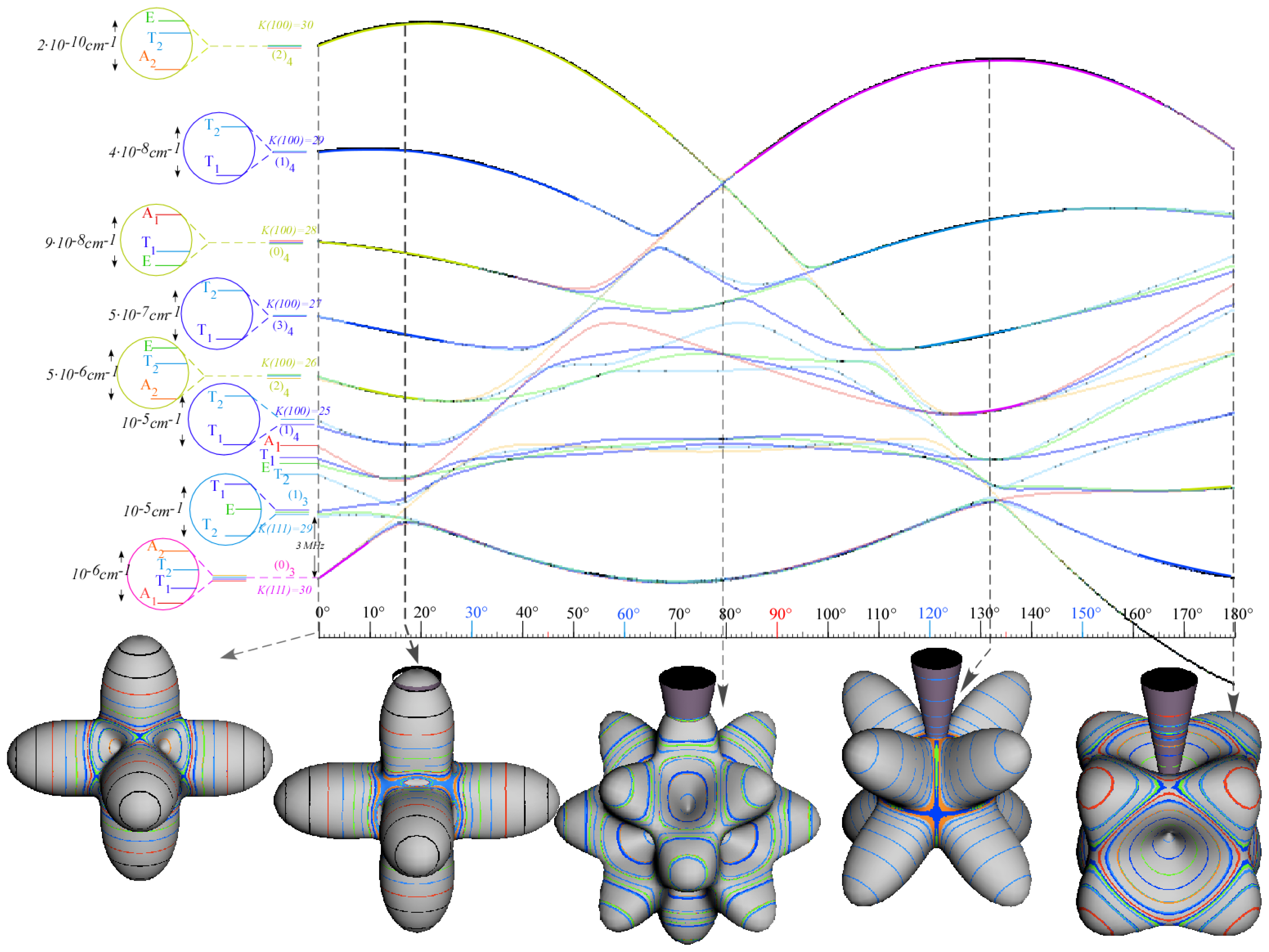
As noted in Section 3 cluster structure location and the RES shape will change significantly as the Hamiltonian parameters change in
Equation (134) as
Figure 29 (a copy of
Figure 6) shows by plotting rotational energy levels of
Equation (134) for changing
θ with corresponding RES at points along the
θ axis. RES plots in the figure demonstrate how the phase-space changes as
θ varies.
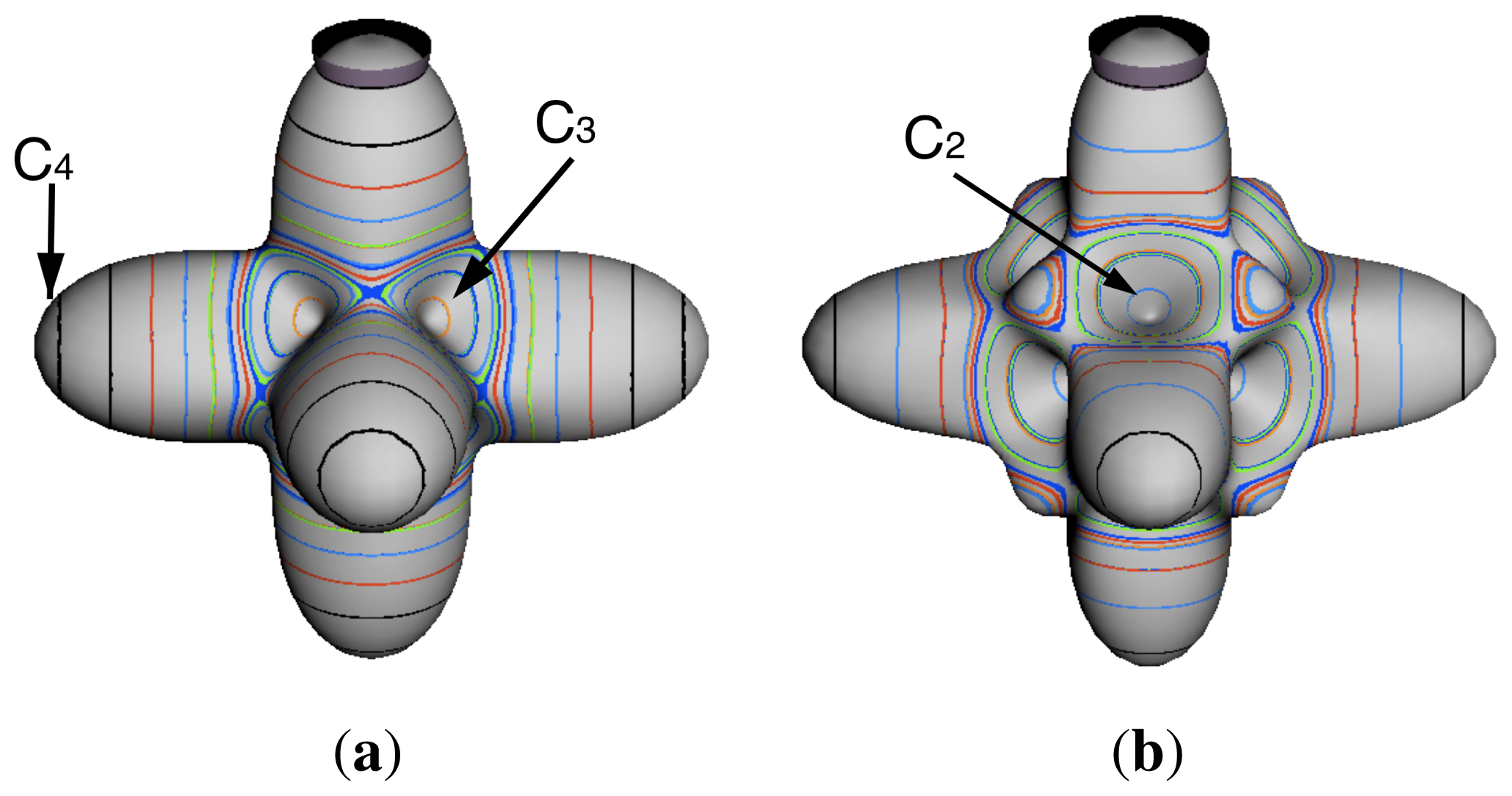
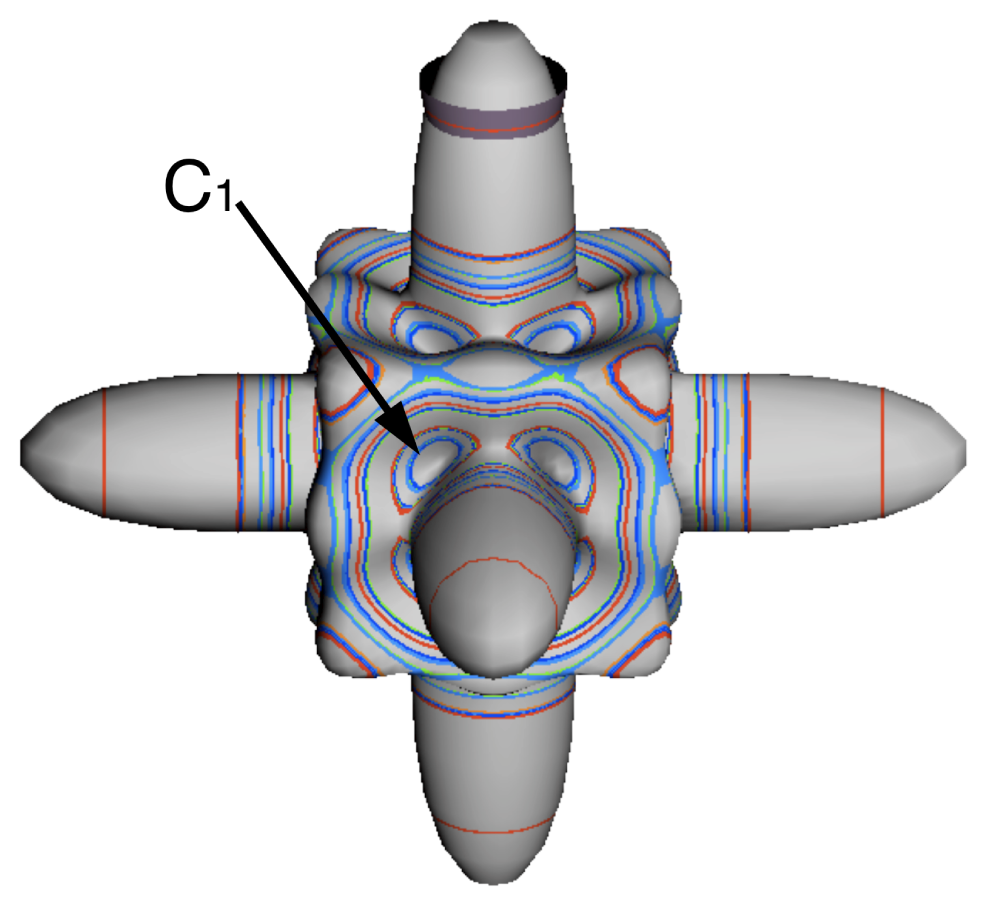
RES diagrams in
Figure 29 along with the cluster degeneracy indicate where in the parameter-space
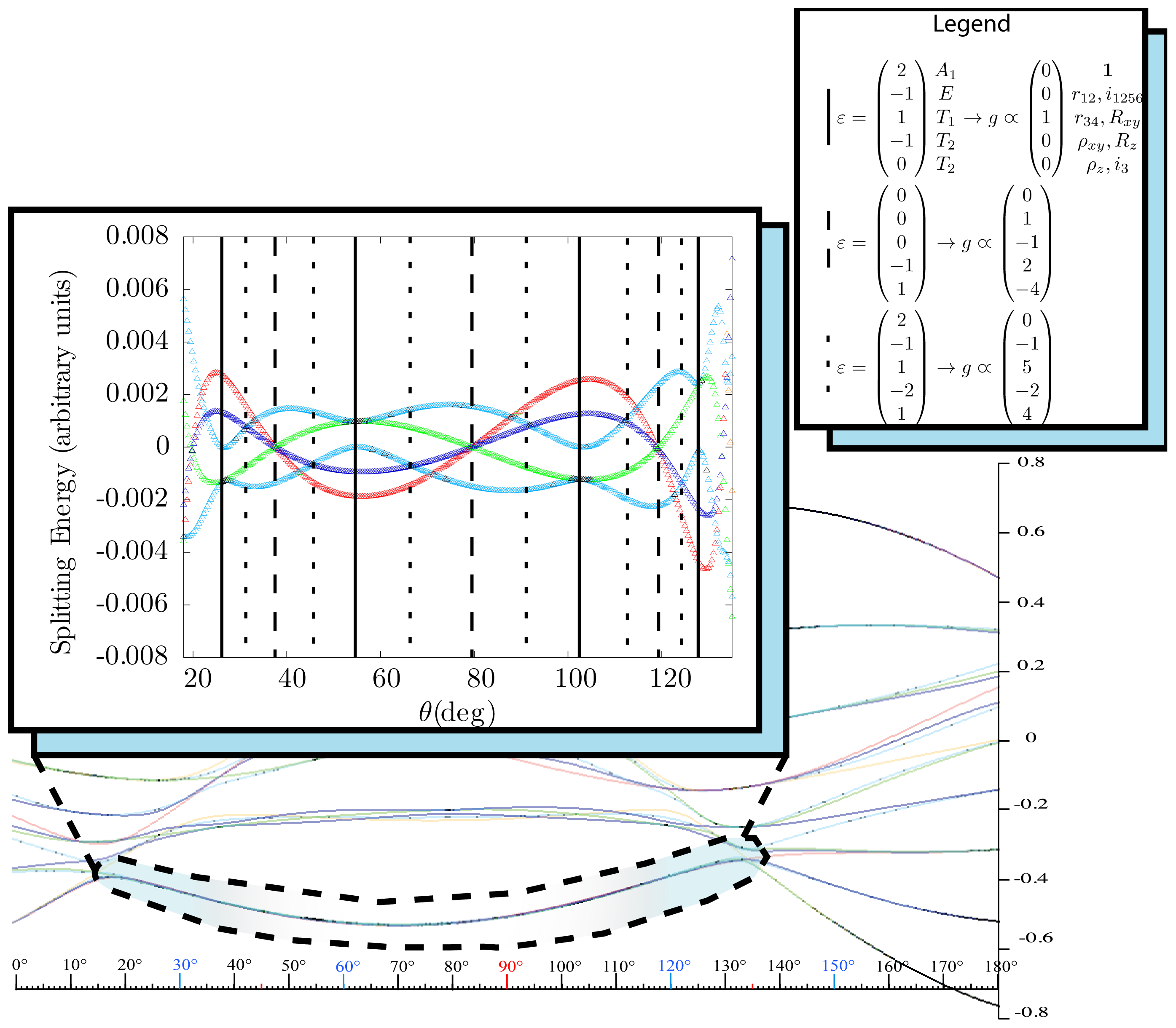
C2 clusters exist. The lowest 0
2(
C2)↑
O cluster in
Figure 29 for
θ between 18° and 132° labels a kaleidoscope of 12 waves each with
C2 local symmetry. Its superfine levels are magnified about 100 times in the central inside plot of
Figure 30 which has been adjusted to show level splittings but not whole cluster shifting. (The
θ-dependent cluster center-of-energy is subtracted.) The locally antisymmetric 1
2(
C2)↑
O clusters contain quite similar superfine structure but with
A2 replacing
A1 and
T1 switched with
T2.
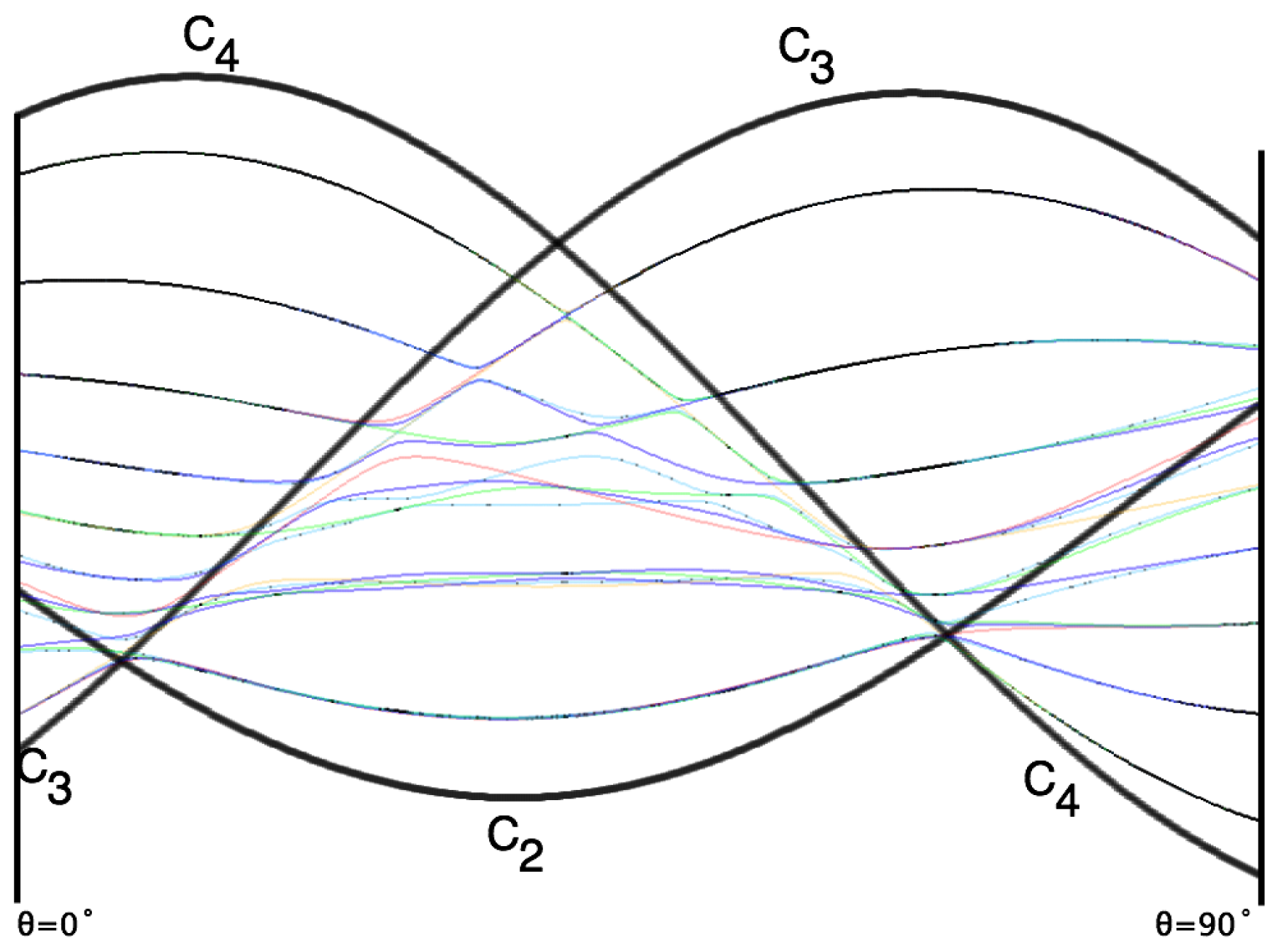
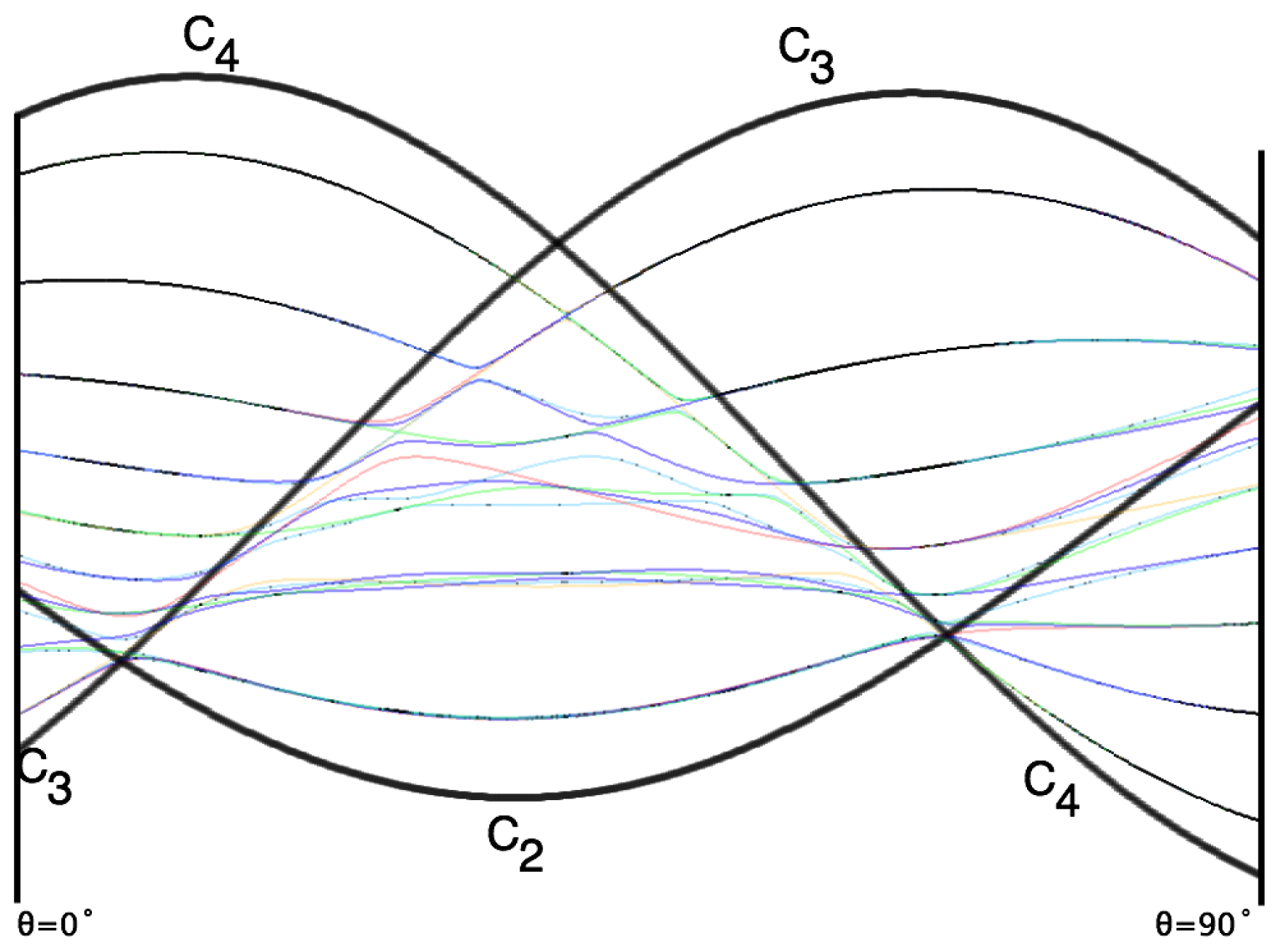
At certain
θ-points in
Figure 30 levels of different symmetry cross and one of three distinctive splitting patterns emerge. These points occur periodically as indicated by vertical lines that are (starting form left side) solid, dotted, dashed, dotted, solid, dotted, dashed, solid, and so forth across the plot. The three distinctive
εα-energy level patterns for species
α=(
A1, E, T1, T2, T2) are given by vectors
εdash=(0
, 0
, 0
, 1
,−1),
εdot=(2
, −1
, 1
, 1
, −1) and
εsolid=(2
, −1
, 1
, 0
, −1), respectively. These repetitious patterns seem to persist even outside of the marked-off sections to the very ends of the
C2 cluster region at
θ≃18° and
θ≃132° where they grow slightly but maintain their respective superfine ratio patterns and degeneracy. The matrix in
Table 15 transforms each of the three
εα-vectors in
Figure 30 into a vector of
O-defined sub-class tunneling amplitudes
gr. These are evaluated for clusters at several values of parameter
θ used in
T[4,6] Hamiltonian
Equation (134). Proportioned values of the tunneling amplitudes
gr for the three distinctive cases are listed in the inset legend of
Figure 30 based on
Tables 14 and
15.
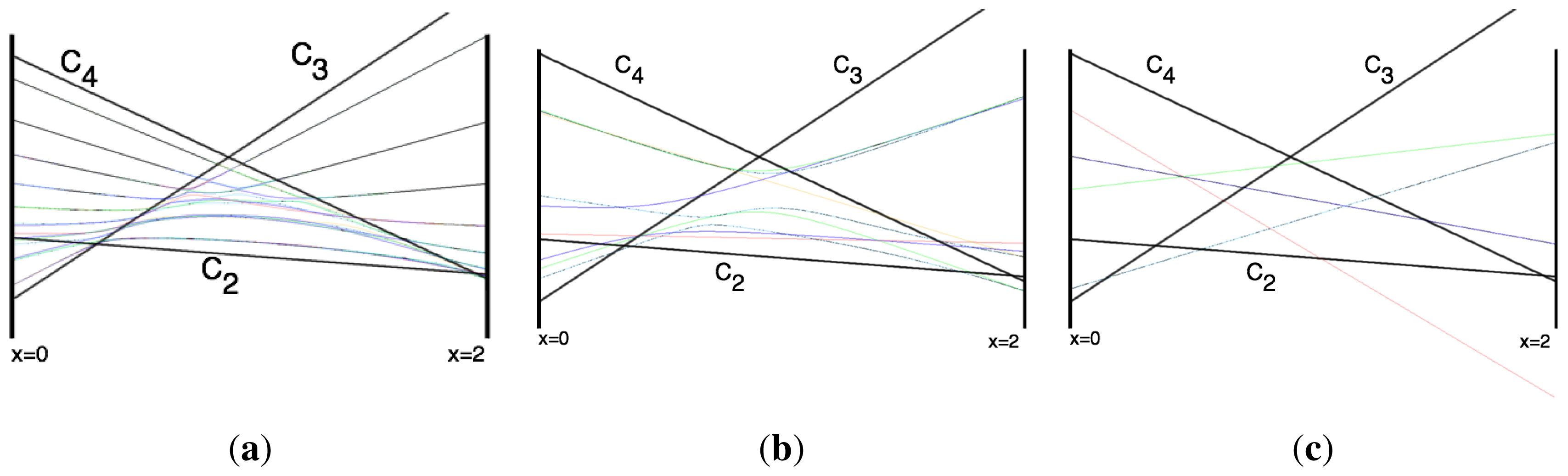
Dotted-line and solid-line curve patterns appear alternately flipped in sign. Dotted-line patterns have a crossing (T1,T2) pair while the solid-line patterns have a crossing (T2,E) pair.
Solid-line patterns appear to be centered on quasi-hyperbolic avoided-level-crossing episodes involving the pair of repeated T2 tensor species of O. The ordering (A1, T1, T2, E, T2) of solid-line superfine level patterns reflects Bohr-like orbital ordering (s, p, d, f, ..) of orbital momentum and occurs only when there is just one non-zero sub-class of tunneling parameter, namely that of sub-class (r34 or equivalent Rxy) that affects tunneling between nearest-neighbor C2 valleys.
Dashed-line pattern level curve
slopes appear to alternate (+) and (−) signs and exhibit maximum separation of repeated
T2-species surrounding a degenerate (
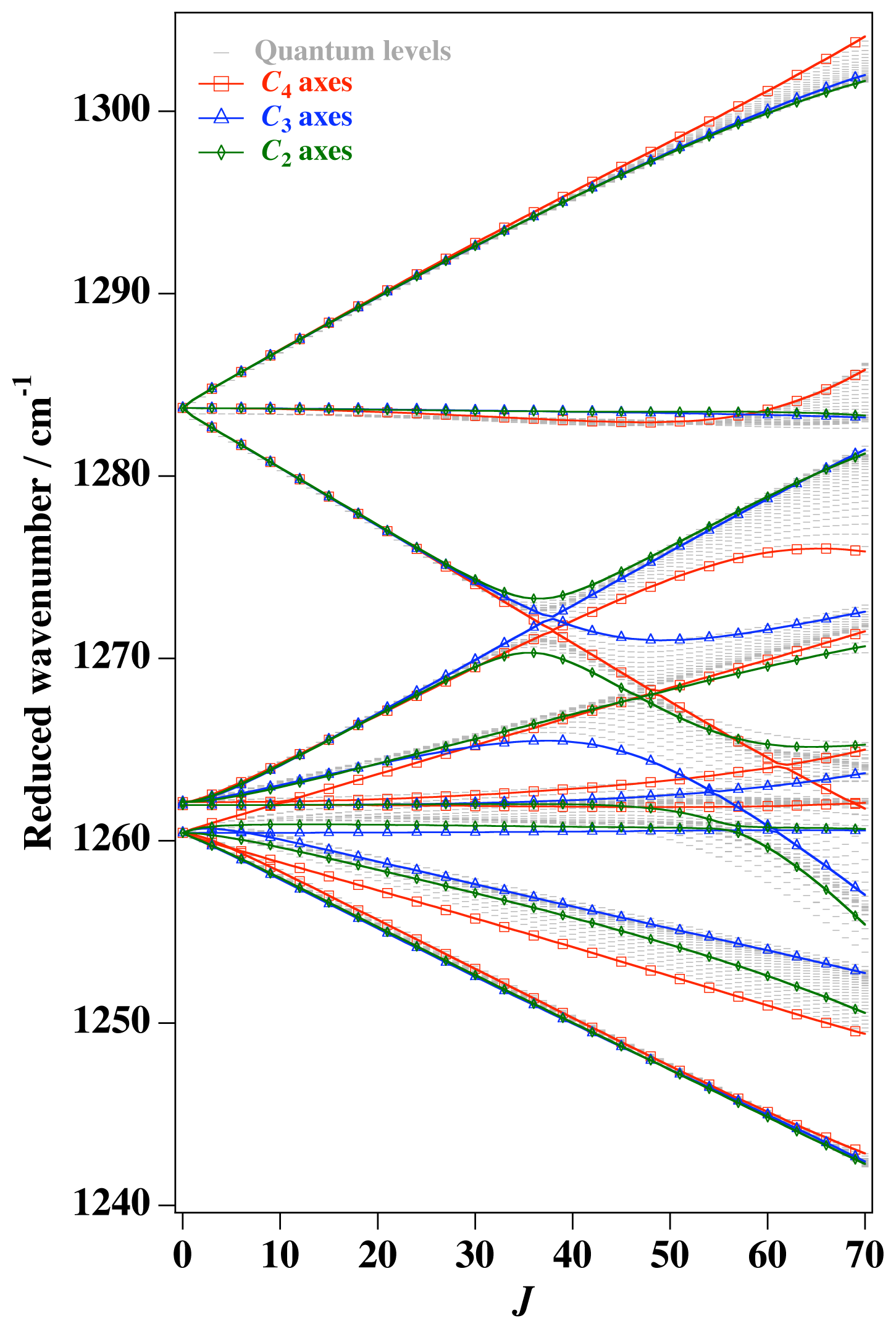
A1, T1, E)-sextet crossing midway in between. Such triple-point crossings are quite remarkable. They appear repeatedly in
Figure 30 and persist even at low-
J as seen for
J=4 in
Figure 8c. Higher 1
2(
C2)↑
O clusters show similar triple points made of (
A2, T2, E)-sextets.
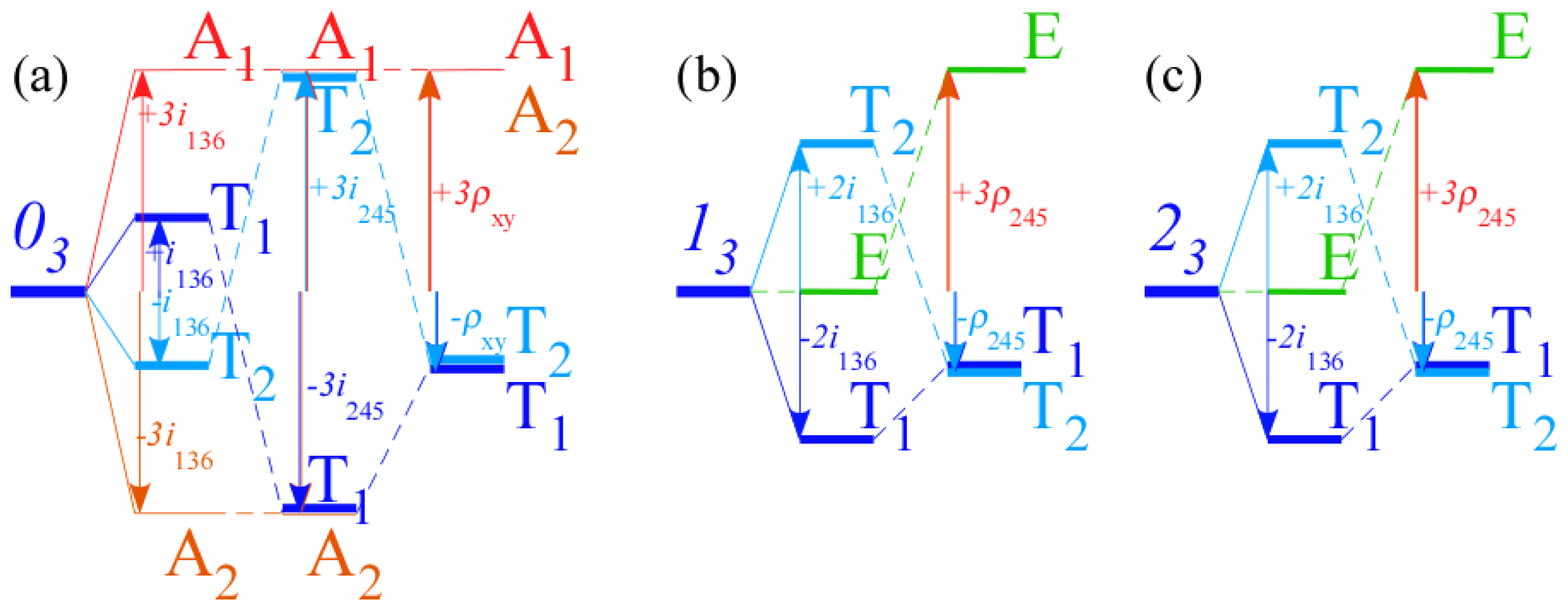
Such crossings are quite ironic if we recall that it was (
A1T1E), (
A2T2E), and (
T1T2) clusters noted by Lea, Leask, and Wolf [
20] and later Dorney and Watson [
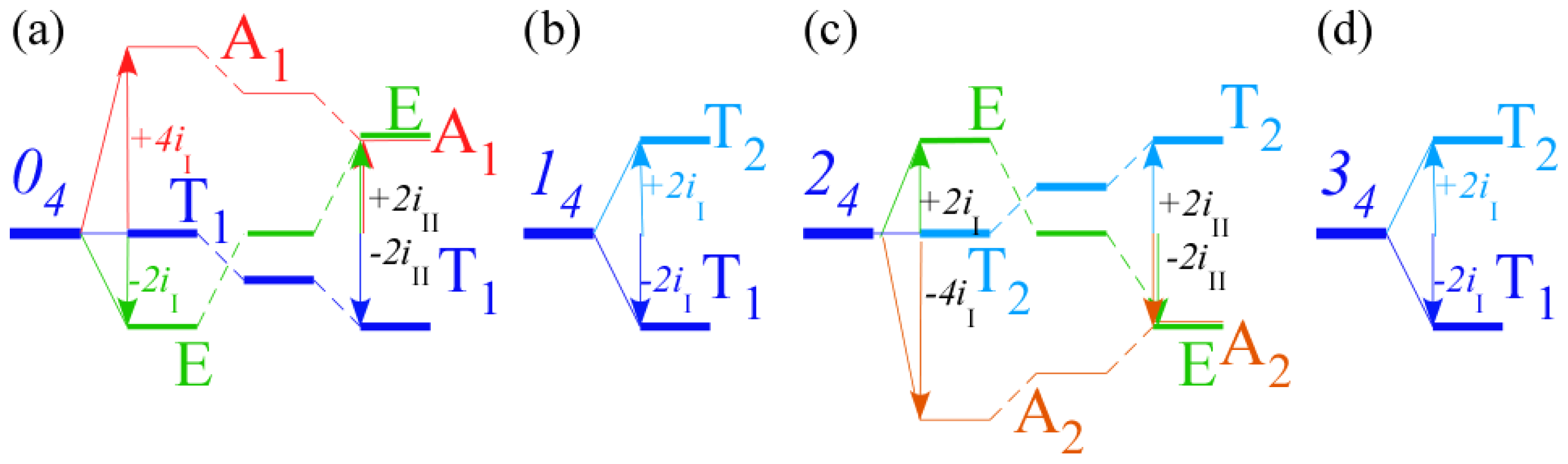
21] that led to a theory involving induced representations
K4(
C4)↑
O including 0
4(
C4)↑
O=
A1⊕
T1⊕
E, 2
4(
C4)↑
O=
A2⊕
T2⊕
E, and ±1
4(
C4)↑
O=
T1⊕
T2. (Recall
C4 columns of
Equation (117) and reciprocity
Equation (106)). This theory uses an inter-
C4-axial tunneling model [
22,
23] with a single
ad.hoc. tunneling parameter that predicts a 2:1-splitting ratio for (
ATE) clusters.
C4-axial tunneling cluster splitting dies exponentially as body momentum-
K approaches
J (Recall
Figure 26) and thus
C4(
ATE) levels never actually cross.
However, the
C2(
ATE) levels in
Figure 30 clearly do so and with quite the opposite 1:2-spltting ratio. It is ironic that the more elegant ortho-complete multi-path tunneling models, while useful in exposing these crossings, seem at a loss to explain them, particularly given that they were first noted by Lea, Leask, and Wolf so very long ago!
It would be easy to write off such (
ATE) triple-crossings and particularly the (
T1T2) or (
ET) double-crossings as “accidental” degeneracy. Indeed, all but the latter occur for special values of a complete set of sub-class parameters. However,
Figure 30 clearly shows that each type of crossing belong to a periodic structure that is unlikely to be just an accident.
Clearly there is still much to learn about multi-path tunneling models in general and the octahedral ones in particular. Here we can only offer a potentially elegant way to treat these kinds of high-symmetry cases.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}