2.1. Hardware Overview
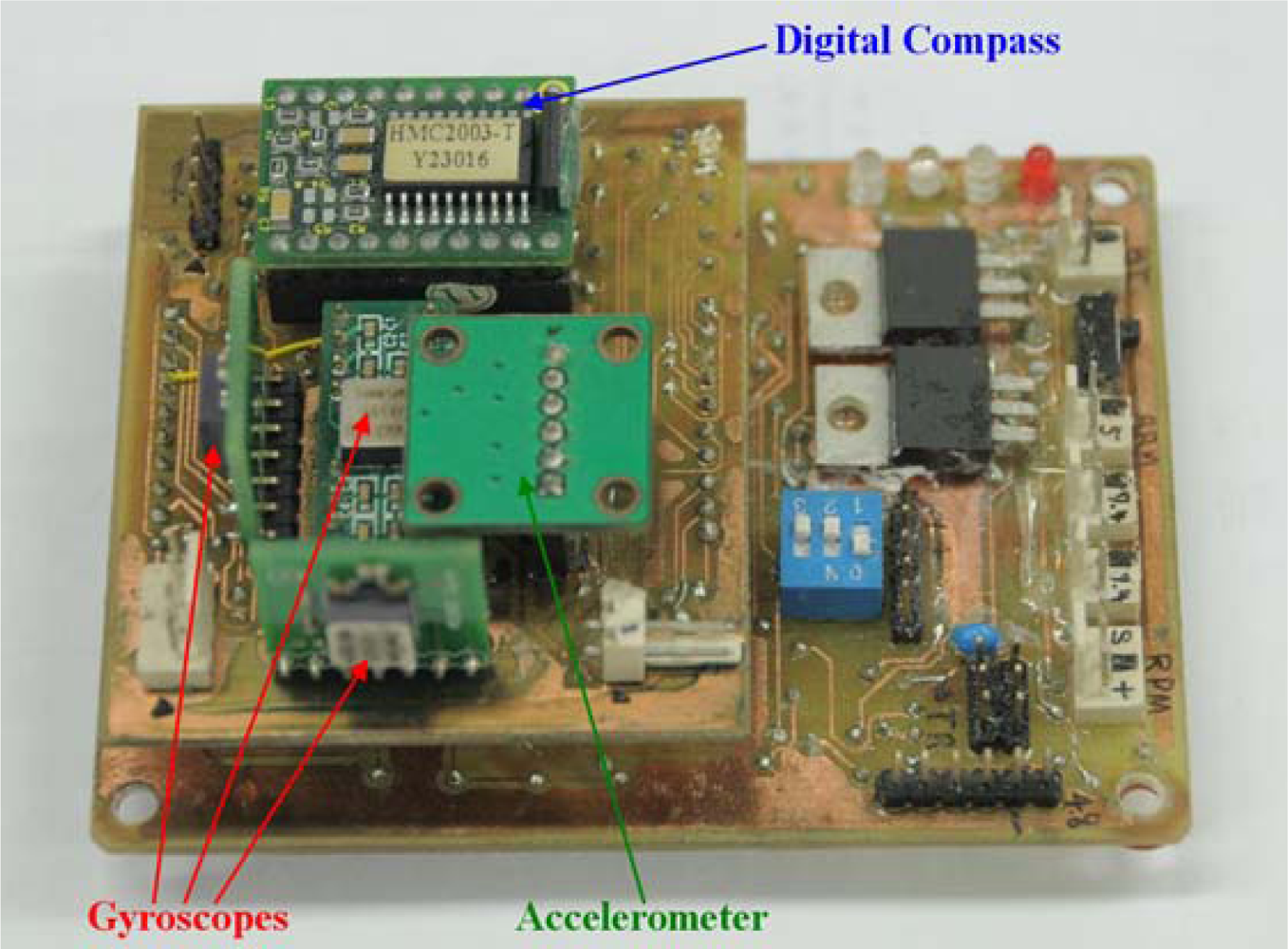
In general, the orientation of the AHRS is derived from the inertial sensors, i.e., accelerometers and gyroscopes, and the magnetic sensors, magnetometers. In this study, the AHRS consists of one 3-axis ADXL 330 accelerometer, three single-axis ADXRS300 gyroscopes, and one 3-axis HMC2003 digital compass which consists of one single-axis and one dual-axis magnetometers. The full-scale range of the accelerometer and the gyroscopes are ±3 g and ±300°/s, respectively. Both these inertial sensors are based on MEMS technology and are produced by Analog Devices. The digital compass is based on AMR technology and produced by Honeywell. The full-scale range of the digital compass is ±2 gauss. Although the digital compass is termed a 3-axis sensor, it actually comprises two AMR sensors, one single-axis and one dual-axis magnetometers.
All these sensors provide analog signals, so an analog-to-digital converter (ADC) is required to acquire the data. Therefore, the PIC18F2553 single-chip microcontroller, made by Microchip Technology, with 10-channel 12-bit ADC is used. In order to increase the computational efficiency and to perform the data fusion algorithm, two PIC18F2553 microcontrollers serve as the processing units of the low-cost AHRS, and they communicate with each other through a built-in Inter-Integrated Circuit (I2C) bus. Moreover, the estimated orientation and the raw data of the AHRS are passed to the personal computer (PC)
via the universal asynchronous receiver/transmitter (UART) interface. The developed AHRS is low-cost due to the application of low priced sensors and microcontrollers and the implemented data fusion algorithm is self-developed. There is no cost-effective testing of this AHRS, but for this testing readers can be referred to the study in [
14]. The configuration of this self-developed AHRS is shown in
Figure 1.
2.2. Data Fusion Algorithm
In order to achieve the application of the AHRS on the navigation of a small UAV, a data fusion algorithm using the second-order complementary filter to estimate the roll and pitch angles is introduced in this study. This algorithm fuses the data measured from the gyroscope and accelerometer triads to obtain the estimated roll and pitch angles, but there is no information about the yaw angle in these two sensors. Therefore, the digital compass is required to provide the information for the estimation of the yaw angle. Since the gyroscope has the problem of drift which results in cumulative errors, especially for the MEMS sensor, some error compensation for the drift will be necessary to estimate a reliable attitude. This is the reason why the data fusion algorithms use of different type of sensors are required in the attitude estimation of low-cost AHRS [
15]. In this study, the Euler angles, namely roll, pitch and yaw angles, are adopted as the orientation representation. The roll and pitch angles are estimated by fusing the outputs of the accelerometer and gyroscopes with a second-order complementary filter [
16]. In this filter, the accelerometer serve as an inclinometer to measure the roll and pitch angles under the assumption that the object where the AHRS attached to is not moving or moving in constant speed, hence the gravity is the only source of acceleration acting on the sensors. Under this assumption, the roll and pitch angles can be estimated by the following equations:
where
ϕAcc and
θAcc are the roll and pitch angles estimated from the accelerometer outputs, respectively;
ax,
ay and
az are the components of the acceleration measured by accelerometer in the body coordinate frame.
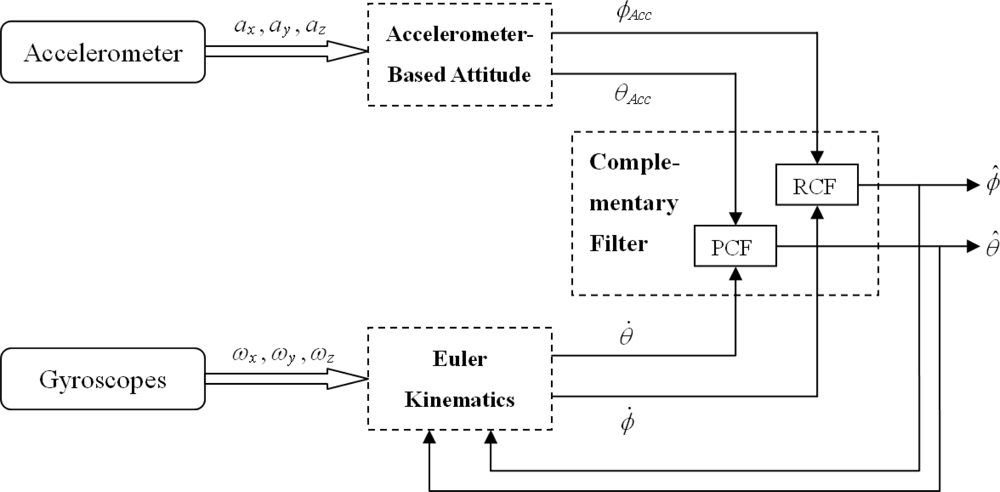
The basic idea of the complementary filter is to pass the attitude derived from the gyroscope through a high-pass filter and the attitude derived from the accelerometer through a low-pass filter and then to fuse those signals to obtain the estimated attitude, thus compensating for the drift on the gyroscope and for the slow dynamics of the accelerometer. Consequently, the estimated attitudes would have both short-term and long-term accuracies.
Figure 2 shows the block diagram of the data fusion algorithm by using the complementary filter, where
ϕ̂ and
θ̂ are the estimated roll and pitch angles respectively, and
ϕ̇ and
θ̇ are the roll and pitch angle rates respectively, which are transformed from the angular rate measured by the gyroscopes in body coordinate frame into the inertial coordinate frame
via the Euler Kinematics. The Euler Kinematics is as follows:
where
ωx,
ωy and
ωz are the angular rates measured by the gyroscopes in body coordinate frame. The blocks labeled as “RCF” and “PCF” in
Figure 2 represent the roll and pitch complementary filters, respectively. This shows that two parallel complementary filters are required in the data fusion algorithm.
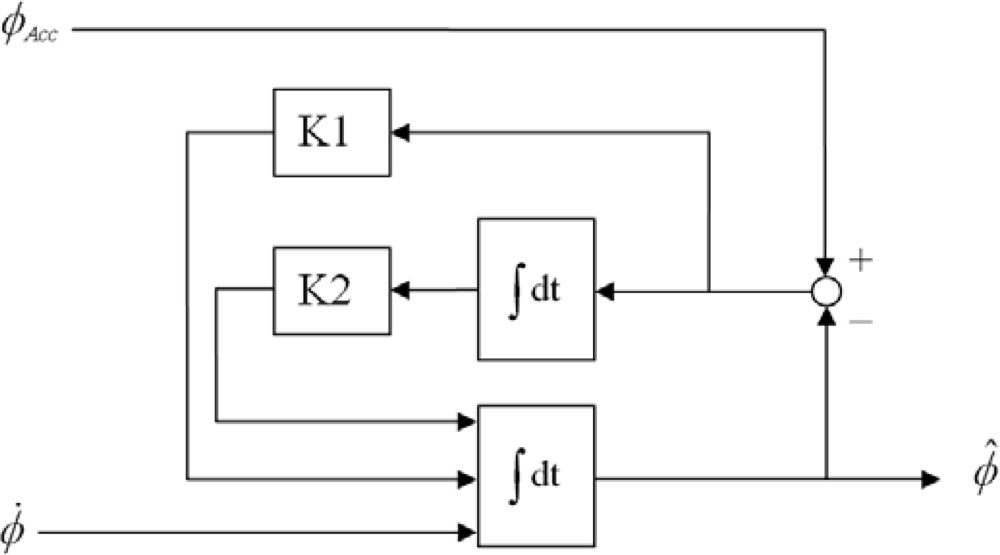
Figure 3 shows the block diagram of the roll complementary filter, where K1 is the gain for the difference between
ϕAcc and previously estimated roll angle
ϕ̂, and K2 is the gain for the integral of this difference. The second-order complementary filter for the roll angle can be depicted by the following transfer function:
where D is the differential operator,
ω0 is the natural frequency, and
ζ is the damping ratio. The adopted
ω0 and
ζ in this study are 0.25 and 3.0, respectively. The derivation of this transfer function is described in [
16]. The pitch complementary filter is identical to the roll complementary filter mentioned above.
With the estimated roll and pitch angles, the yaw angle can be derived from the measured strength of the magnetic field in body coordinate frame by the digital compass:
where
mx,
my, and
mz are the components of the magnetic field strength in body coordinate frame.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}