In/Out Status Monitoring in Mobile Asset Tracking with Wireless Sensor Networks

Abstract
:1. Introduction
- ♦ We develop a framework to detect and correct the incorrect in/out status of a mobile node in a mobile asset tracking system based on the properties of mobile nodes. This method is applicable to many mobile asset tracking applications. To our knowledge, this is the first incorrect in/out status detection technique for mobile asset tracking systems.
- ♦ We propose two state classifiers to control the incorrect in status of a mobile node. These are network based and frequency based classifiers that categorize mobile nodes as either a normal node with a normal connection state or an abnormal node with an abnormal connection state.
- ♦ We propose a battery lifetime estimator to control the incorrect out status of a mobile node. This method estimates battery lifetime and categorizes nodes as either a normal node with a good battery level or an abnormal node with an exhausted battery.
- ♦ We perform experiments with real data sets using both state classifiers and battery lifetime estimation. The experiments show that our approach not only detects incorrect in/out status but also corrects it accurately.
2. Related Work
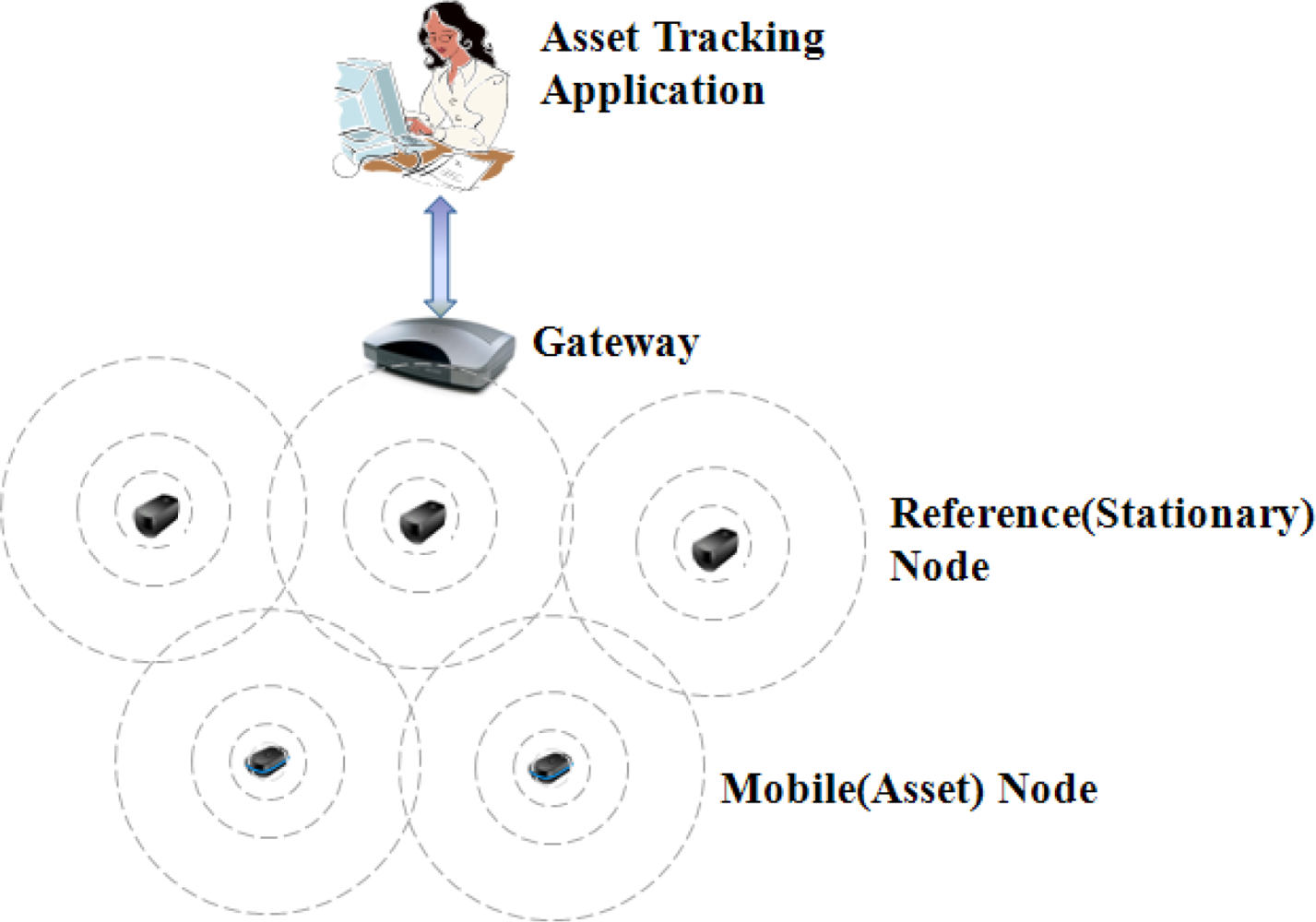
3. System Architecture
4. Status Failure Detection
4.1. Problem Definition
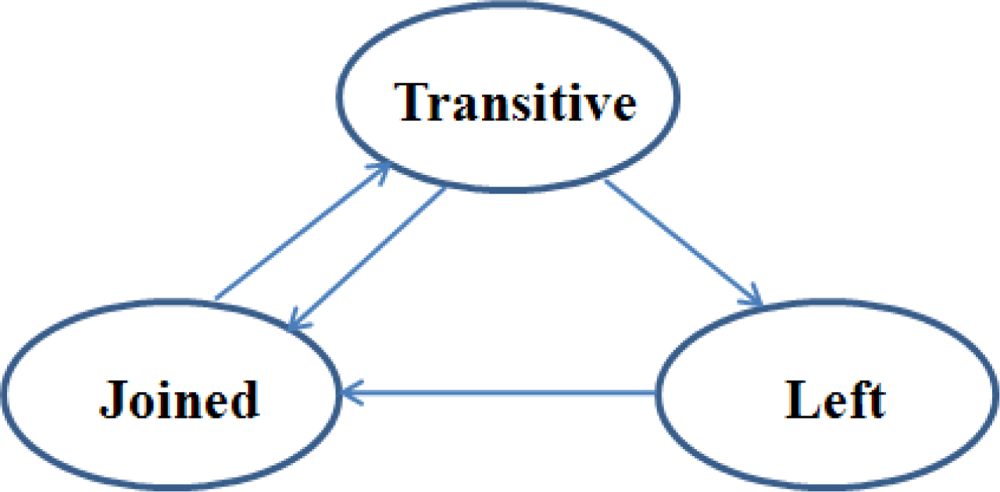
4.2. Connection State Model
4.3. State Classifier
4.3.1. Network-Based Classifier (NBC)
- ♦ Ta : local waiting time between a parent node and a mobile node
- ♦ Te : network-wide waiting time at the gateway
- ♦ d : depth of tree
- ♦ Tp : propagation delay time between nodes
- ♦ Tm : message processing time at a node
- ♦ Tn : connection construction time required to set up a connection anew when a node joins the network
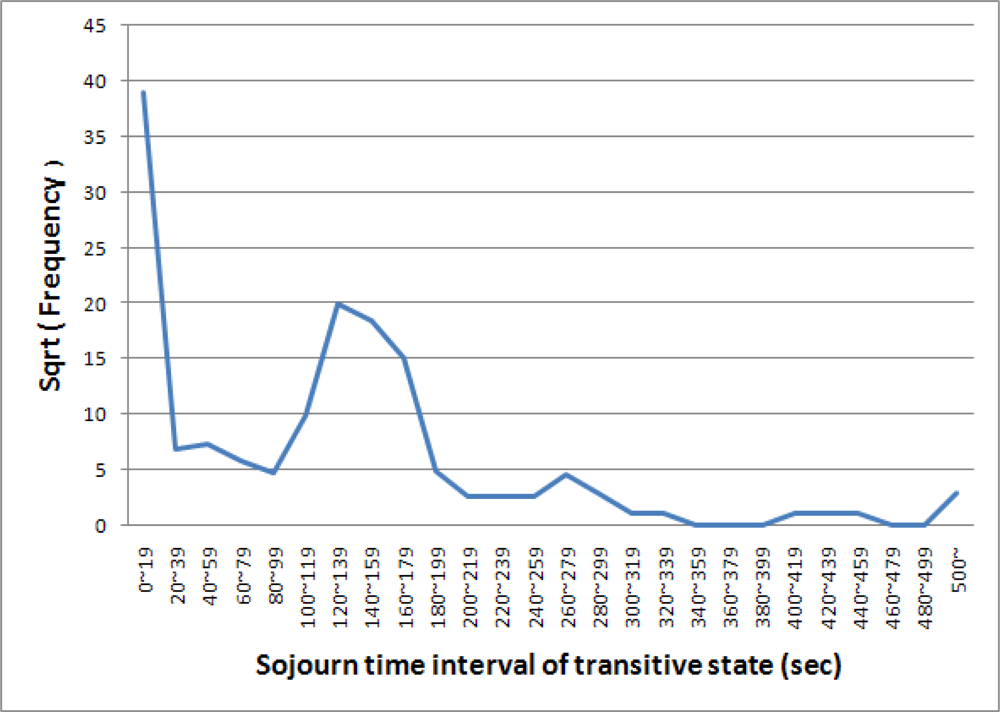
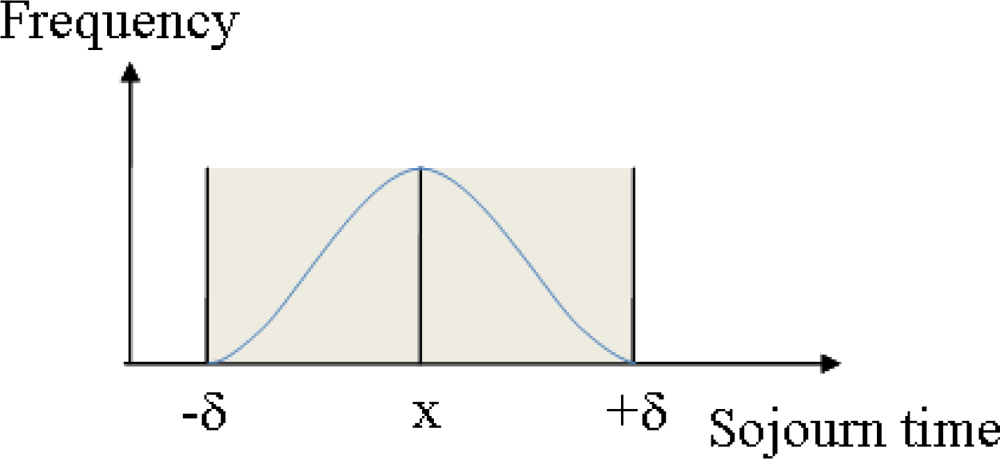
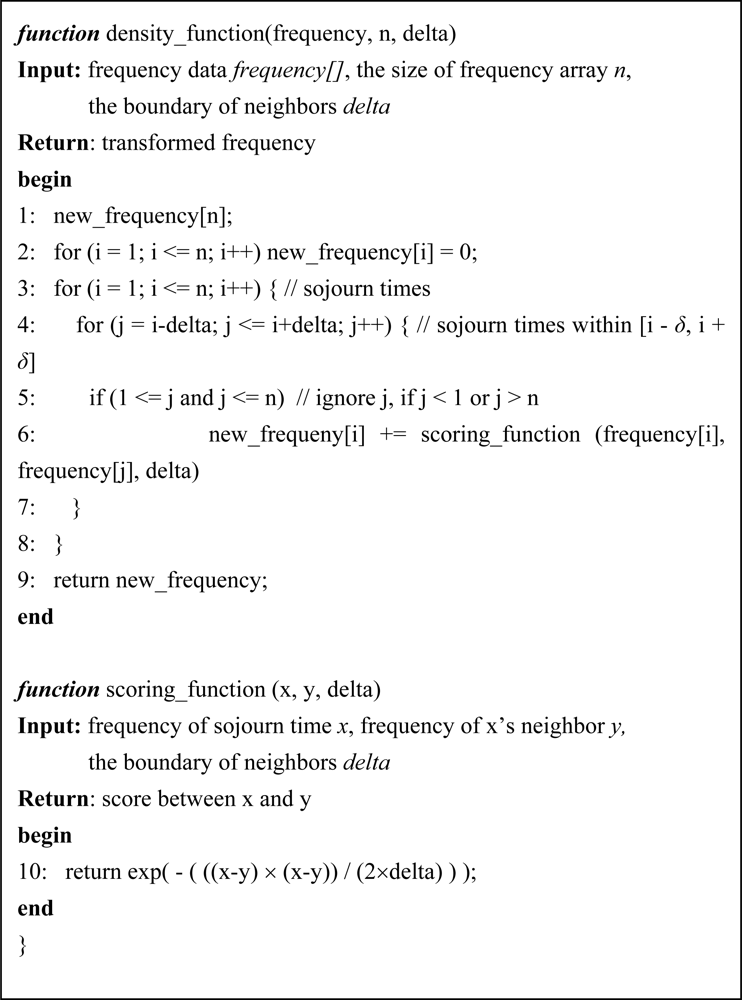
4.3.2. Frequency-Based Classifier (FBC)
4.4. Battery Lifetime
5. Performance Evaluation
5.1. Experimental Environment
5.2. Status Change from Inside to Outside
5.3. Status Change from Outside to Inside
6. Conclusions
Acknowledgments
References and Notes
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. A Survey on Sensor Networks. IEEE Commun. Mag 2002, 40, 102–114. [Google Scholar]
- Chintalapudi, K.; Fu, T.; Paek, J.; Kothari, N.; Rangwala, S.; Caffrey, J.; Govindan, R.; Johnson, E. Monitoring Civil Structures with a Wireless Sensor Network. IEEE Internet Comput 2006, 10, 26–34. [Google Scholar]
- Sazonov, E.; Janoyan, K.; Jha, R. Wireless Intelligent Sensor Network for Autonomous Structural Health Monitoring. Proceedings of the SPIE 5384, San Diego, CA, USA, 15 March 2004; pp. 305–314.
- Ituen, I.; Sohn, G. The Environmental Applications of Wireless Sensor Networks. Inter. J. Content 2007, 3, 1–7. [Google Scholar]
- Mainwaring, A.; Polastre, J.; Szewczyk, R.; Culler, D.; Anderson, J. Wireless Sensor Networks for Habitat Monitoring. Proceedings of the 1st ACM International Workshop on Wireless Sensor Networks and Applications, Atlanta, GA, USA, 28 September 2002; pp. 88–97.
- Osterlind, F.; Pramsten, E.; Roberthson, D.; Eriksson, J.; Finne, N.; Voigt, T. Integrating Building Automation Systems and Wireless Sensor Networks. Proceedings of IEEE Conference on Emerging Technologies and Factory Automation, Patras, Greece, 25 September 2007; pp. 1376–1379.
- Rajendran, N.; Kamal, P.; Nayak, D.; Rabara, S. A. WATS-SN: A Wireless Asset Tracking System using Sensor Networks. Proceedings of IEEE International Conference on Personal Wireless Communications, New Dehli, India, 24 January 2005; pp. 237–243.
- Shuai, M.; Xie, K.; Ma, K.; Song, G. An On-Road Wireless Sensor Network Approach for Urban Traffic State Monitoring. Proceedings of IEEE Conference on Intelligent Transportation System, Beijing, China, 12 October 2008; pp. 1195–1200.
- Zhuang, L.Q.; Liu, W.; Zhang, D.H.; Kamajaya, I. Distributed Asset Tracking using Wireless Sensor Network. Proceedings of IEEE International Conference on Emerging Technologies and Factory Automation, Hamburg, Germany, 15 September 2008; pp. 1165–1168.
- Kim, K.; Jun, J.; Kim, S.; Sung, B. Y. Medical Asset Tracking Application with Wireless Sensor Networks. Proceedings of International Conference on Sensor Technologies and Applications, Cap Esterel, France, 25 August 2008; pp. 531–536.
- Mason, A.; Al-Shamma’a, A. I.; Shaw, A.; Irven, J.; Wiktorowicz, R. Intelligent Wireless Asset Tracking of Packaged Gases. J. Phys.: Conf. Ser 2007, 76, 012037. [Google Scholar]
- Klingbeil, L.; Wark, T. A Wireless Sensor Network for Real-time Indoor Localisation and Motion Monitoring. Proceedings of International Conference on Information Processing in Sensor Networks, St. Louis, MO, USA, 22 April 2008; pp. 39–50.
- Yuce, M. R.; Ng, P. C.; Lee, C. K.; Khan, J. Y.; Liu, W. A Wireless Medical Monitoring Over A Heterogeneous Sensor Network. Proceedings of IEEE Engineering in Medicine and Biology Society, Lyon, France, 23 August 2007; pp. 5894–5898.
- Chen, J.R.; Kher, S.; Somani, A. Distributed Fault Detection of Wireless Sensor Networks. Proceedings of International Conference on Mobile Computing and Networking, Los Angeles, CA, USA, 24 September 2006; pp. 65–72.
- Ramanathan, N.; Chang, K.; Kapur, R.; Girod, L.; Kohler, E.; Estrin, D. Sympathy for the Sensor Network Debugger. Proceedings of International Conference on Embedded Networked Sensor Systems, San Diego, CA, USA, 2 November 2005; pp. 255–267.
- Rost, S.; Balakrishnan, H. Memento: A Health Monitoring System for Wireless Sensor Networks. Proceedings of Annual IEEE Communications Society on Sensor, Mesh and Ad Hoc Communications and Networks, Reston, VA, USA, 25 September 2006; pp. 575–584.
- Meier, A.; Motani, M.; Siquan, H.; Kunzli, S. DiMo: Distributed Node Monitoring in Wireless Sensor Networks. Proceedings of International Symposium on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Vancouver, BC, Canada, 27 October 2008; pp. 117–121.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Real Location | Application’s Decision | Reason |
|---|---|---|
| Outside | Inside |
|
| Inside | Outside |
|
| Symbol | Description |
|---|---|
| Cs,C′s | amount of consumed current in sleeping phase |
| Cp,C′p | amount of consumed current in polling phase |
| Ct | amount of consumed current in transmitting phase |
| Ts,T′s | duration of sleeping phase |
| Tp,T′p | duration of polling phase |
| Tt | duration of transmitting phase |
| Tc,T′c | duration of one cycle |
| Cb | initial battery current |
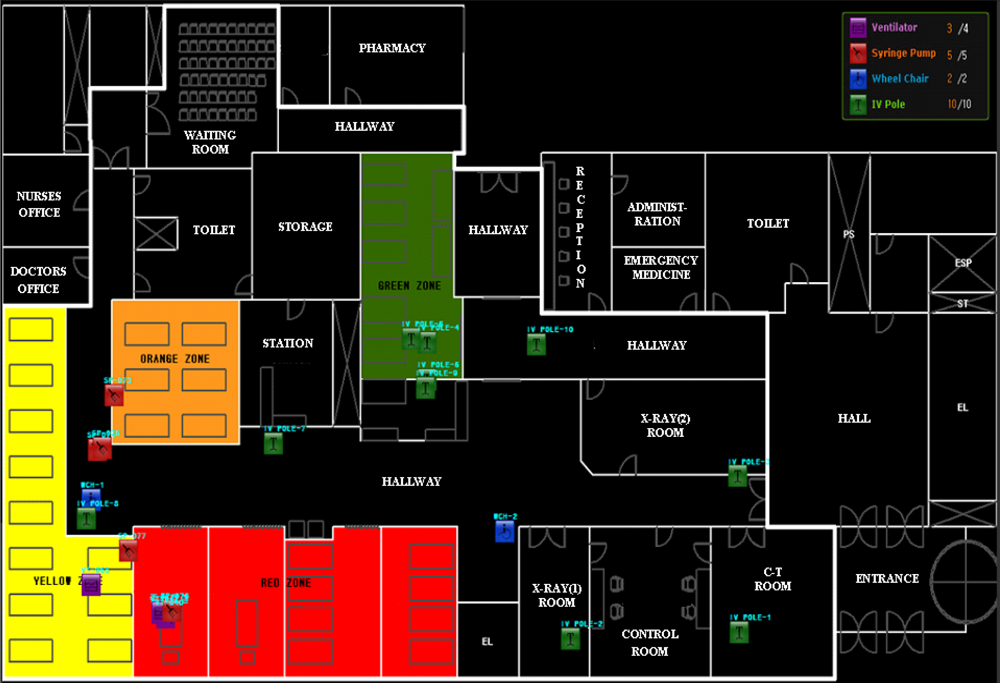
| Component | Count | Icon/Figure | Meaning | Section | Patient Types |
|---|---|---|---|---|---|
| Application | 1 |  | Ventilator | Red | Unconscious or Injured |
| Gateway | 1 |  | Syringe Pump | Green | Children |
| Reference node | 29 |  | Wheelchair | Orange | Elderly |
| Mobile node | 21 |  | IV Pole | Yellow | General |
 | Bed | ||||
 | Door |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Cb | 1300 mAh | be | 0.8 |
| Cs | 0.07 mA | C′s | 0.07 mA |
| Cp | 12.5 mA | C′p | 12.5 mA |
| Ct | 40 mA | Tt | 2 sec |
| Ts | 30 sec | T′s | 20 sec |
| Tp | 5 sec | T′p | 0.5 sec |
| Cavg | 3.908 mA | C′avg | 0.373 mA |
© 2010 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Kim, K.; Chung, C.-W. In/Out Status Monitoring in Mobile Asset Tracking with Wireless Sensor Networks. Sensors 2010, 10, 2709-2730. https://doi.org/10.3390/s100402709
Kim K, Chung C-W. In/Out Status Monitoring in Mobile Asset Tracking with Wireless Sensor Networks. Sensors. 2010; 10(4):2709-2730. https://doi.org/10.3390/s100402709
Chicago/Turabian StyleKim, Kwangsoo, and Chin-Wan Chung. 2010. "In/Out Status Monitoring in Mobile Asset Tracking with Wireless Sensor Networks" Sensors 10, no. 4: 2709-2730. https://doi.org/10.3390/s100402709