Design and Instrumentation of a Measurement and Calibration System for an Acoustic Telemetry System

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. System Instrumentation
3. System Calibration and Data Acquisition
- Vrms is the root-mean-square (RMS) value of the transmitted waveform in volts.
- Wrms is the RMS value of the acquired waveform in volts.
- G is the corresponding gain of the signal amplifier in decibels (dB), defined as 20 times the logarithm of the RMS ratio.
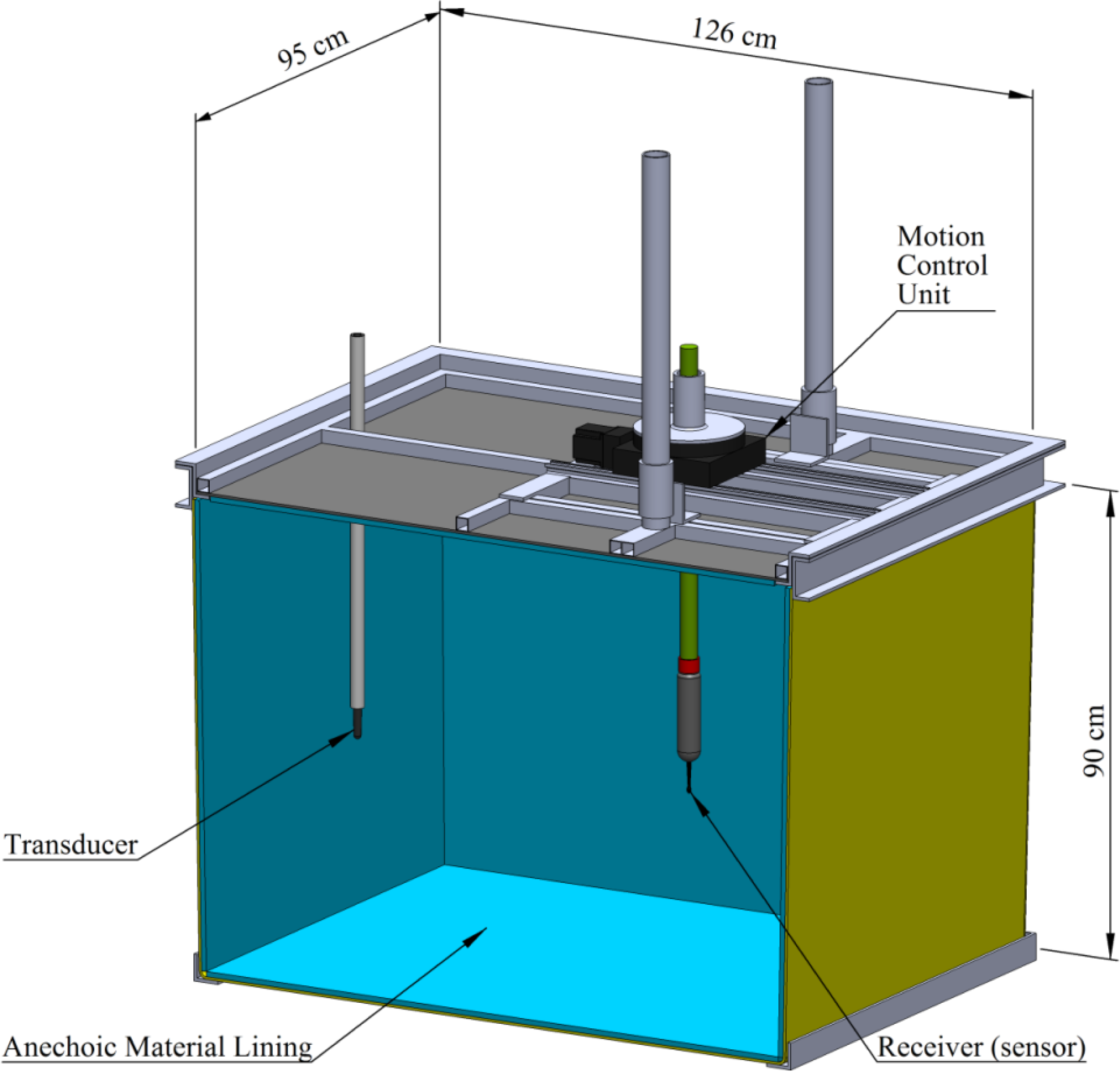
- D is the distance from the transducer to the receiver in meters; D is 1 m in Figure 1.
- Ps is the transmitting sensitivity of the transducer in dB re 1 μPa /V @ 1 m.
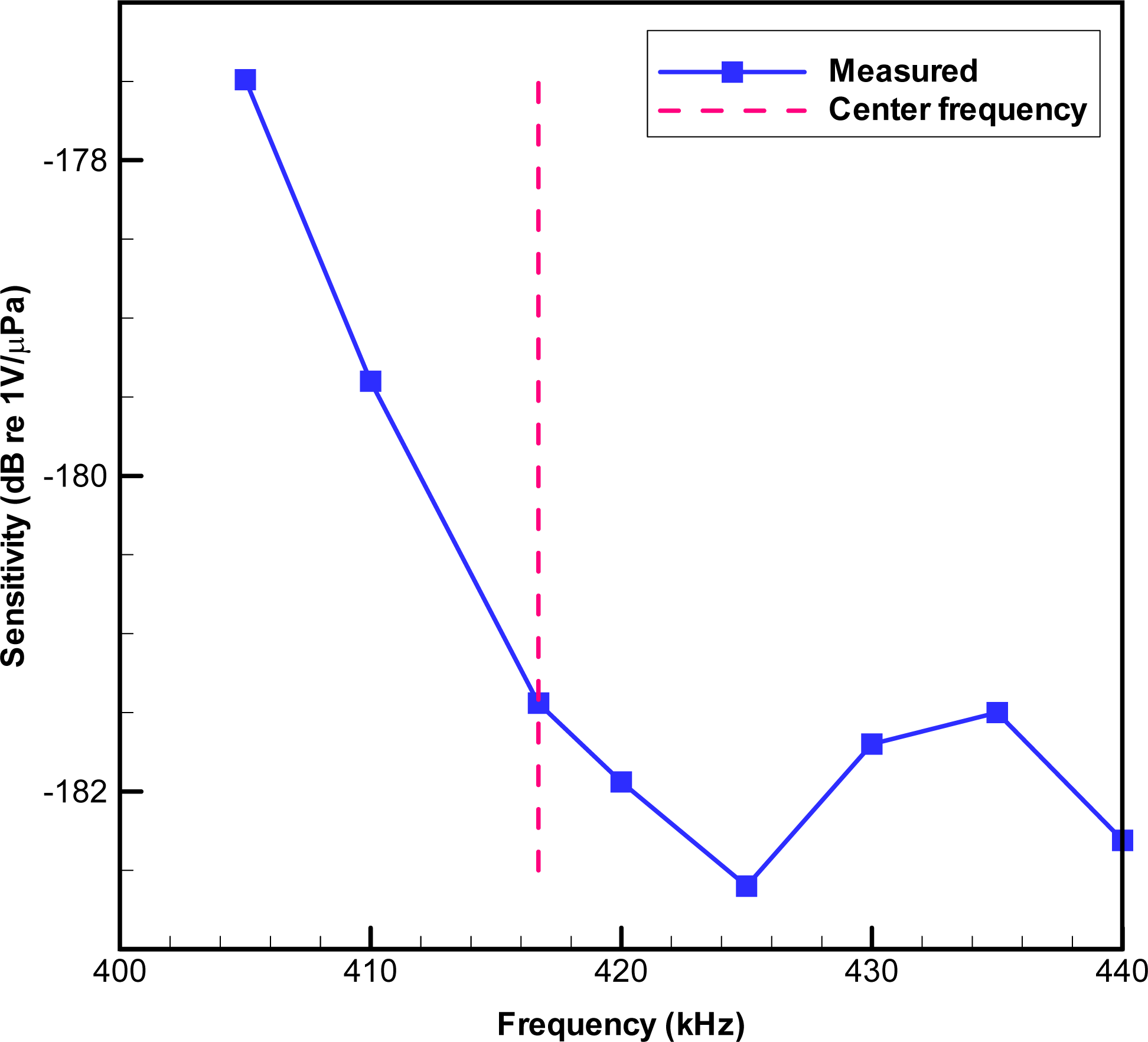
- Hs is the hydrophone sensitivity in dB re 1 V /μPa.
- TL is the transmitting loss in dB.
- The DAQ board triggers the waveform generator to send a preprogrammed signal (pulse, sine wave, or full coded waveform) to the transducer.
- The transducer converts the signal to acoustic pressure signals in the tank.
- The piezoelectric sensor in the receiver converts the acoustic pressure signal into voltage that is conditioned and amplified before being digitized and loaded into the computer buffer memory.
- The signal is saved to the computer hard drive if it meets the predetermined detection criteria.
- Steps 1 through 4 are repeated until the preset number of measurements is made.
- The data acquisition board triggers the motion control unit to move to the next location and start new measurements.
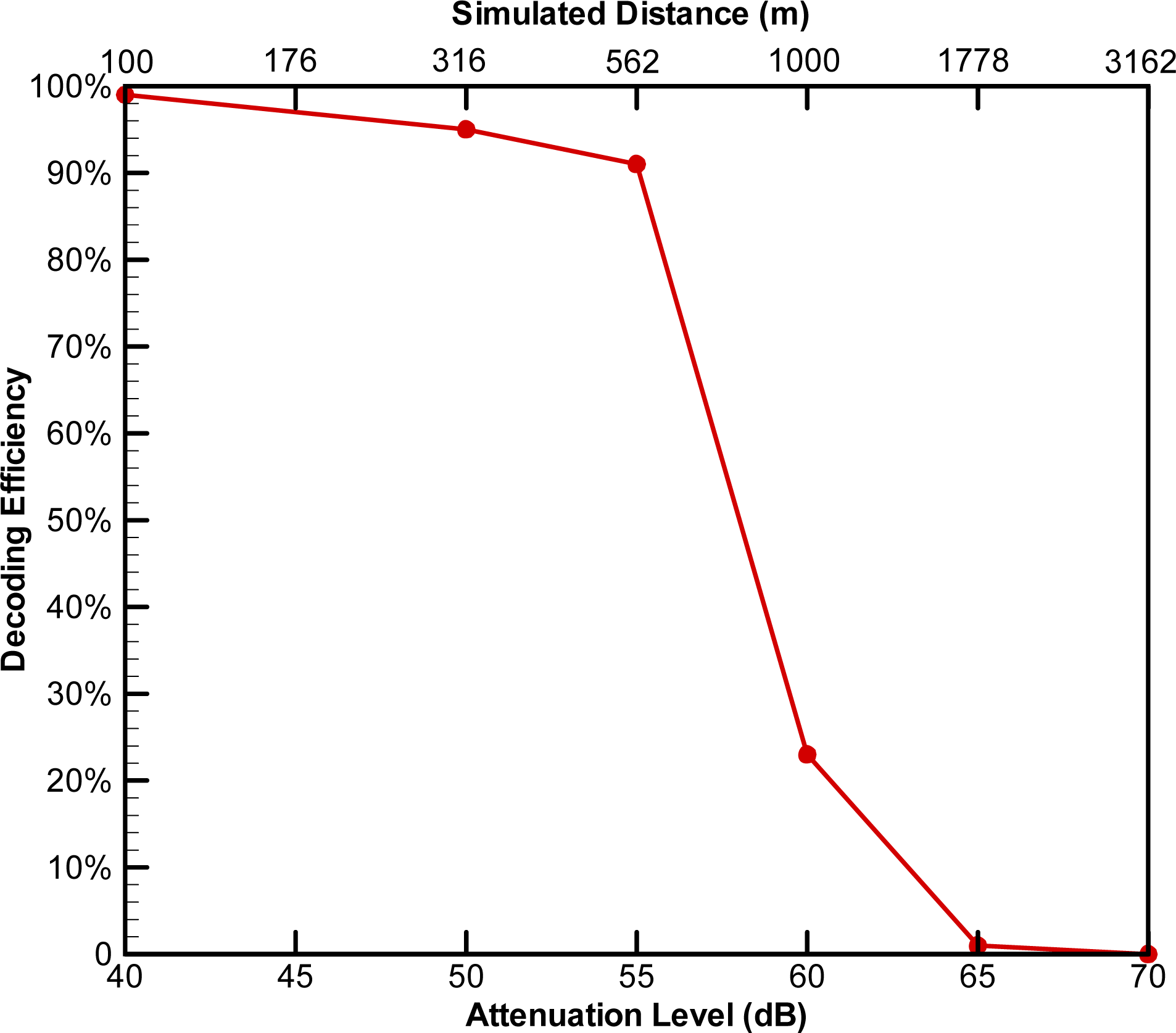
- Decoding utilities are used to evaluate system performance; data analysis packages are employed to compute sensitivities, beam profiles, or other characteristics.
4. System Performance Measurements
5. Conclusions
Acknowledgments
References
- McMichael, G.A.; Eppard, M.B.; Carlson, T.J.; Carter, J.A.; Ebberts, B.D.; Brown, R.S.; Weiland, M.A.; Ploskey, G.R.; Harnish, R.A.; Deng, Z.D. The Juvenile Salmon Acoustic Telemetry System: a new tool. Fisheries 2010, 35, 9–22. [Google Scholar]
- Weiland, M.A.; Ploskey, G.R.; Hughes, J.S.; Deng, Z.; Fu, T.; Monter, T.J.; Johnson, G.E.; Khan, F.; Wilberding, M.C.; Cushing, A.W.; Zimmerman, S.A.; Faber, D.M.; Durham, R.E.; Townsend, R.L.; Skalski, J.R.; Kim, J.; Fischer, E.S.; Meyer, M.M. Acoustic Telemetry Evaluation of Juvenile Salmonid Passage and Survival at John Day Dam with Emphasis on the Prototype Surface Flow Outlet; 2008; PNNL-18890,; Pacific Northwest National Laboratory: Richland, WA, USA, 2009. [Google Scholar]
- McMichael, G.A.; Johnson, G.E.; Vucelick, J.A.; Ploskey, G.R.; Carlson, T.J. Use of Acoustic Telemetry to Assess Habitat Use of Juvenile Chinook Salmon and Steelhead at the Mouth of the Columbia River; PNNL-15575,; Pacific Northwest National Laboratory: Richland, WA, USA, 2006. [Google Scholar]
- McComas, R.L.; McMichael, G.A.; Vucelick, J.A.; Gilbreath, L.; Everett, J.P.; Smith, S.G.; Carlson, T.; Matthews, G.; Ferguson, J.W. A Study to Estimate Salmonid Survival Through the Columbia River Estuary Using Acoustic Tags; 2006.; Fish Ecology Division, Northwest Fisheries Science Center, National Marine Fisheries Service: Seattle, WA, USA, 2008. [Google Scholar]
- Fernandez, J.F.; Dogan, A.; Zhang, Q.M.; Tressler, J.F.; Newnham, R.E. Hollow Piezoelectric Composites. Sensor. Actuat. A: Phys 1995, 51, 183–192. [Google Scholar]
- Campopiano, S.; Cutolo, A.; Cusano, A.; Giordano, M.; Parente, G.; Lanza, G.; Laudati, A. Underwater Acoustic Sensors Based on Fiber Bragg Gratings. Sensors 2009, 9, 4446–4454. [Google Scholar]
- Couch, L.W. Digital and Analog Communication Systems, 7th ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2007. [Google Scholar]
- Watkins, W.A.; Schevill, W.E. Sound Source Location by Arrival-Times on a Non-Rigid Three-Dimensional Hydrophone Array. Deep-Sea Res 1972, 19, 691–706. [Google Scholar]
- Spiesberger, J.L.; Fristrup, K.M. Passive Location of Calling Animals and Sensing of Their Acoustic Environment Using Acoustic Tomography. Am. Naturalist 1990, 135, 107–153. [Google Scholar]
- Urick, R.J. Principles of Underwater Sound for Engineers; McGraw-Hill: New York, NY, USA, 1967. [Google Scholar]
- Crochiere, R.E.; Rabiner, L.R. Multi-Rate Signal Processing; Prentice-Hall: Englewood Cliffs, NJ, USA, 1983. [Google Scholar]





© 2010 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Deng, Z.; Weiland, M.; Carlson, T.; Eppard, M.B. Design and Instrumentation of a Measurement and Calibration System for an Acoustic Telemetry System. Sensors 2010, 10, 3090-3099. https://doi.org/10.3390/s100403090
Deng Z, Weiland M, Carlson T, Eppard MB. Design and Instrumentation of a Measurement and Calibration System for an Acoustic Telemetry System. Sensors. 2010; 10(4):3090-3099. https://doi.org/10.3390/s100403090
Chicago/Turabian StyleDeng, Zhiqun, Mark Weiland, Thomas Carlson, and M. Brad Eppard. 2010. "Design and Instrumentation of a Measurement and Calibration System for an Acoustic Telemetry System" Sensors 10, no. 4: 3090-3099. https://doi.org/10.3390/s100403090