Development of an Emergency Locking Unit for a Belt-In-Seat (BIS) System Using a MEMS Acceleration Sensor

Abstract
:1. Introduction
2. CG Type Emergency Lock in the BIS System
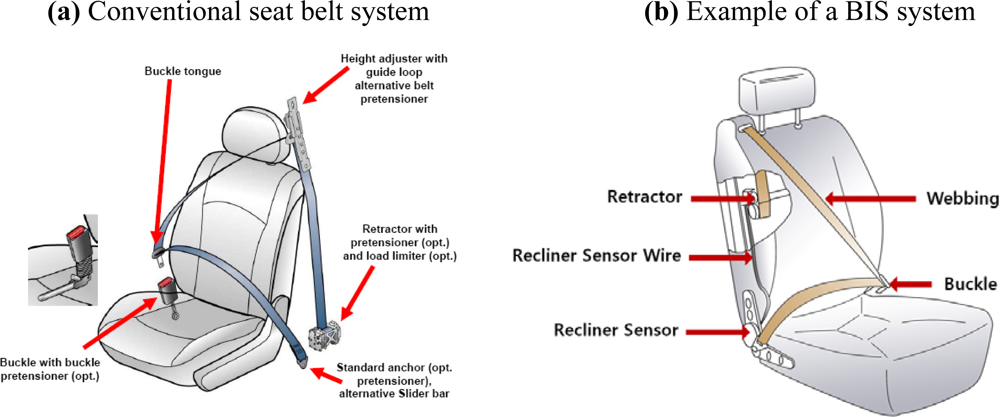
2.1. Description of Conventional Seat Belt System and BIS System
2.2. CG Type Emergency Lock in Conventional Seat Belt Systems
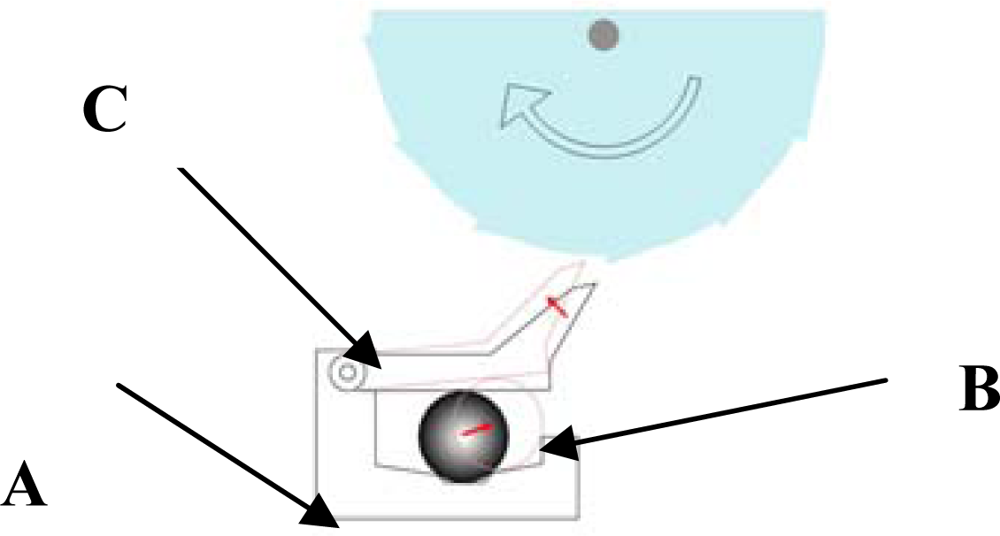
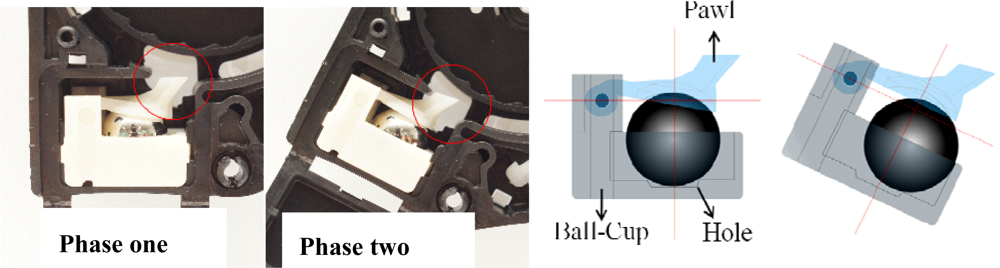
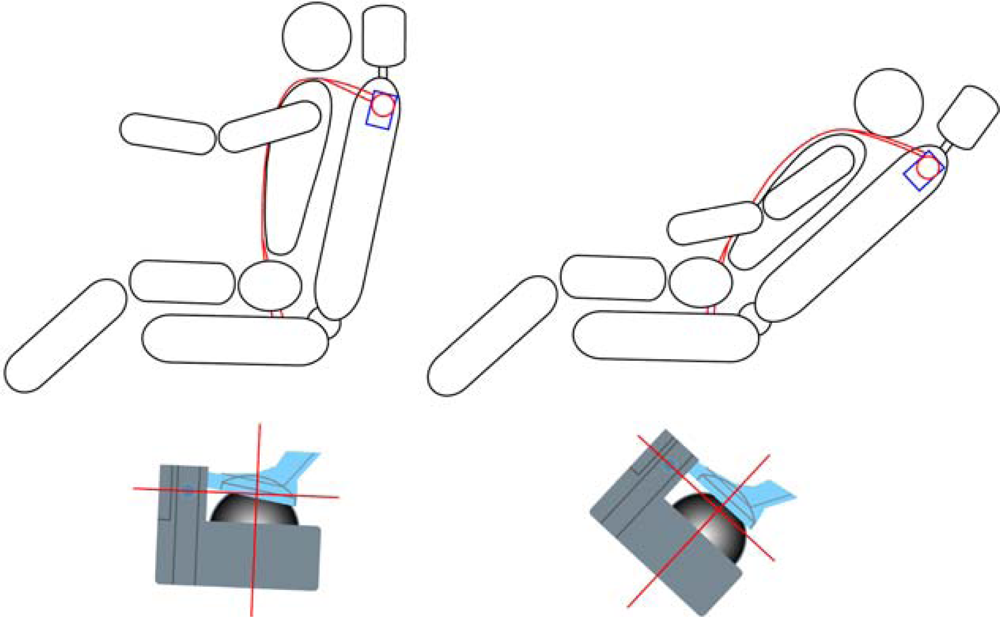
2.3. Recliner Sensor of BIS Systems
3. A New Design of an Emergency Locking Unit in a BIS System
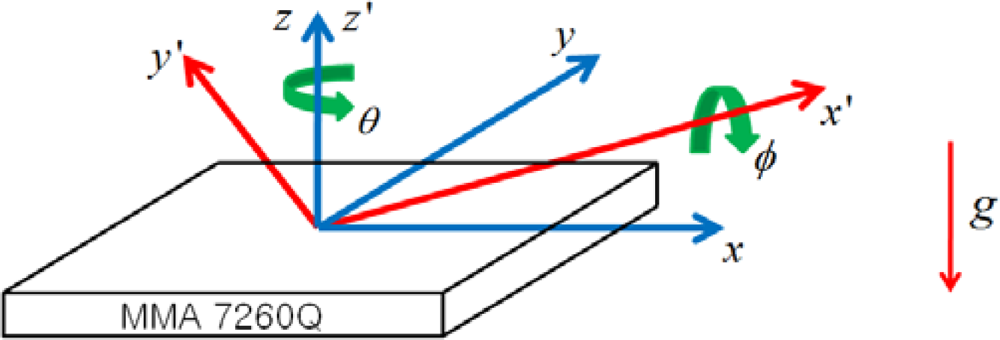
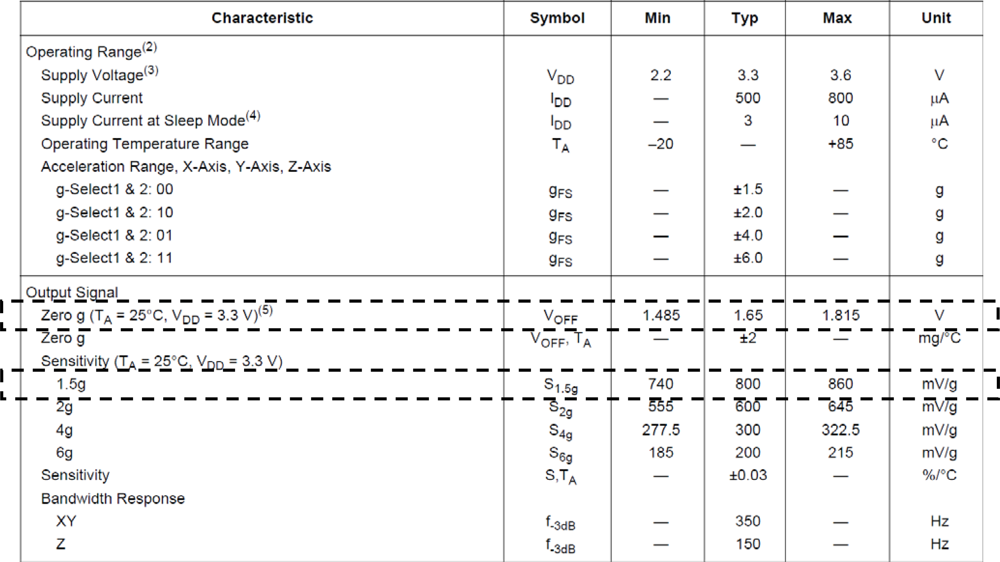
3.1. Theoretical Background
3.2. Overall System
3.3. Experimental Results
3.3.1. Incline Test
3.3.2. Acceleration Test
4. Concluding Remarks
Acknowledgments
References
- Autoliv. Autoliv seat belts fitted to new Renault Megane. AutoTechnology 2002. [Google Scholar]
- Haland, Y. The evolution of the three point seat belt from yesterday to tomorrow. Autoliv Research. 2002. Available online: http://www.autoliv.com/wps/wcm/connect/70eb73804ce4f371a8b9eef594aebdee/ALV-Report-BertilAldmanLecture-2006Sep.pdf?MOD=AJPERES (accessed on 13 April 2010).
- Hassan, A.; Morris, A.; Welsh, R. Some Characteristics of side impact crashes involving modern passenger vehicles. Available online: http://www.ukccis.com/downloads/download_publication.asp?file=publications/ICrash_200621406-rw2.PDF (accessed on 13 April 2010).
- Farmer, C.M.; Wells, J.K.; Werner, J.V. Relationship of head restraint positioning to driver neck injury in rear-end crashes. Proceedings of Compendium of the Whiplash Associated Disorders World Congress, Vancouver, BC, Canada, February 7–11, 1999.
- Welcher, J.B.; Szabo, T.J. The relationship between seat properties and human subject kinematics in rear impact tests. Proceedings of Compendium of the Whiplash associated Disorders World Congress, Vancouver, BC, Canada, February 7–11, 1999.
- Song, D.; Uriot, J.; Trosseille, P.; Mack, C.; Tarriere, C.; Got, C.; Domont, A. Modeling and analysis of interactions between occupant, seatback and headrest in rear impact. Proceedings of International Conference on the Biomechanics of Impact (IRCOBI), Dublin, Ireland, September 11–13, 1996.
- Balci, R.; Vertiz, A. Delphi automotive systems, comfort and usability of the seat belts. SAE Paper 2001-01-0051,. 2001. [Google Scholar]
- Borde, P. Pyrotechnic knee bolster development and its contribution to car drivers safety. SAE Paper 2001-01-1049,. 2001. [Google Scholar]
- Viano, D.C. Energy transfer to an occupant in rear crashes: effect of stiff and yielding seats. SAE Paper 2003-01-0180,. 2003. [Google Scholar]
- Autoliv Home Page. http://www.autoliv.com (accessed on 13 April 2010).
- Delphi Home Page. http://www.delphi.com (accessed on 13 April 2010).
- Zhou, R.; Hong, W.; Lakshminarayan, V. Design targets for seat integrated restraint systems for optimal occupant protection. SAE paper 2001-01-0158,. 2001. [Google Scholar]
- Park, S.; Jeon, M. A study on improvement of crash discrimination performance for offset and angular crash events using electronic X-Y 2-axis accelerometer. Trans. Korean Soc. Autom. Eng 2003, 11, 128–136. [Google Scholar]
- Song, C.M.; Lee, J.W. Autocalibration method of three-axis micromachined accelerometers. Proceedings of KIPE Power Electronics Conference, Jeju, Korea, June 22–24, 2006; pp. 302–304.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












© 2010 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Baek, C.H.; Lee, J.W.; Kim, S.H.; Paek, I. Development of an Emergency Locking Unit for a Belt-In-Seat (BIS) System Using a MEMS Acceleration Sensor. Sensors 2010, 10, 3759-3770. https://doi.org/10.3390/s100403759
Baek CH, Lee JW, Kim SH, Paek I. Development of an Emergency Locking Unit for a Belt-In-Seat (BIS) System Using a MEMS Acceleration Sensor. Sensors. 2010; 10(4):3759-3770. https://doi.org/10.3390/s100403759
Chicago/Turabian StyleBaek, Chang Hyun, Jeong Wan Lee, Seock Hyun Kim, and Insu Paek. 2010. "Development of an Emergency Locking Unit for a Belt-In-Seat (BIS) System Using a MEMS Acceleration Sensor" Sensors 10, no. 4: 3759-3770. https://doi.org/10.3390/s100403759