A New Collaborative Knowledge-Based Approach for Wireless Sensor Networks


Abstract
:1. Introduction
- We propose a knowledge-based sensor that executes a small FRBS that has been adapted to it and allows experts to incorporate uncertain and vague knowledge about the sensor data into the sensors;
- We define an application protocol that is adapted to sensor networks and enables the distribution of knowledge bases (KBs) and data communication between sensors;
- We examine the performance of the sensor and protocol, and observe from the results that the sensor reaction time and the network throughput and delay allow the system to be used in a wide set of applications;
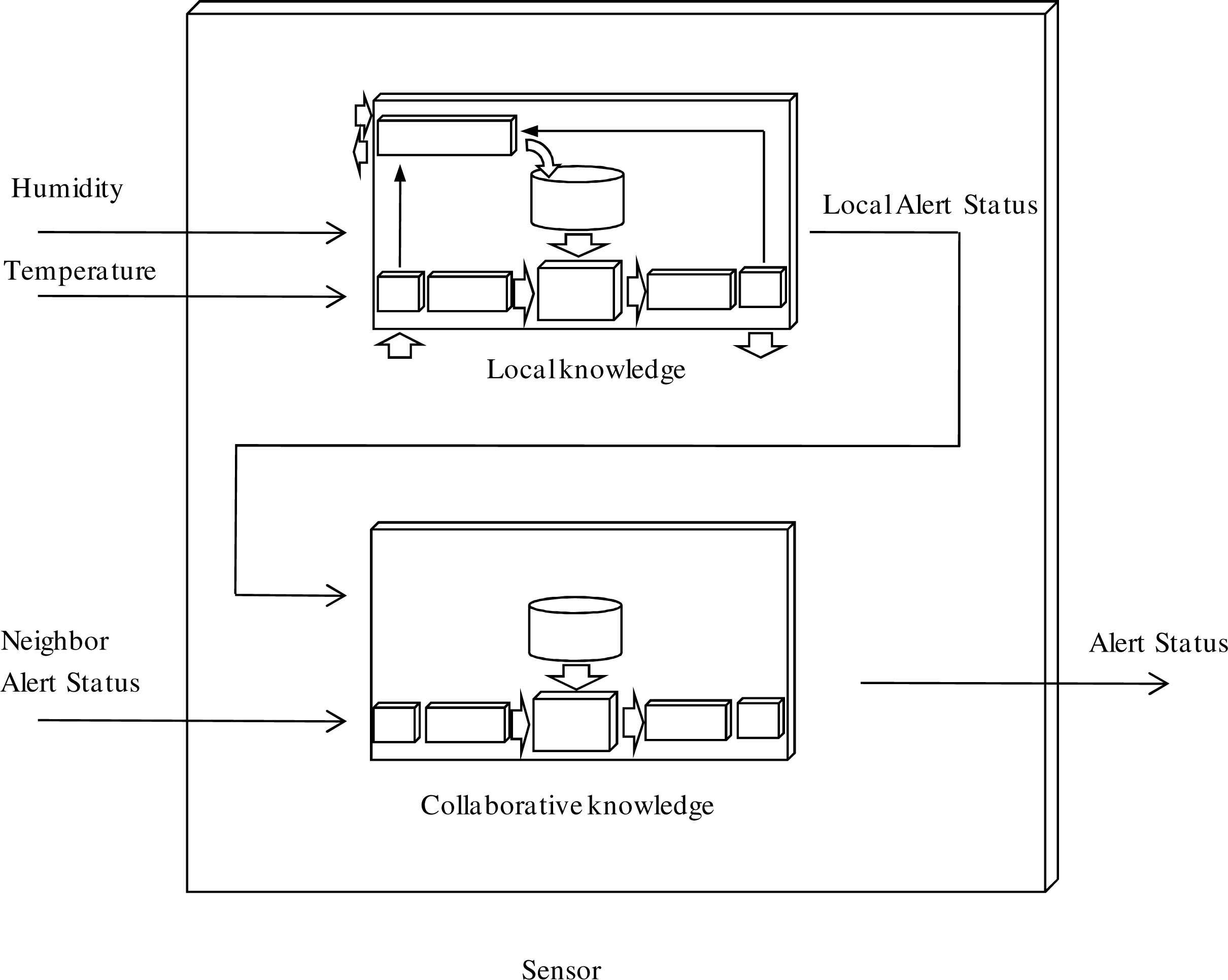
- We propose a collaborative knowledge-based scheme that allows for collaboration among sensors in order to achieve a global network objective. The collaborative knowledge is defined by means of a FRBS, which is a very effective approach to support uncertainty and imprecision. As a real-world application, we present a knowledge-based WSN that concretely models a system of olive tree pests. The development of the olive tree fly is strongly related to the temperature and humidity conditions of the environment. The suitability of insecticide treatments applications should be evaluated if the risk of the plague appearance in an area surpasses a threshold level.
2. Related Work and Motivation
- Transmit a significant amount of data to neighbor nodes.
- Process a significant amount of data.
- Individual observations.
- The knowledge that was obtained from their neighbor nodes.
- The collaborative scheme may deal with uncertainty and imprecision.
- It is possible to separate control or modeling knowledge from collaborative knowledge, using interpretable rules in both cases.
- The collaborative approach may support sensor failures and communication errors because, in this case, the collaborative sensor would infer a proportional value to the number of failures between control or modeling knowledge (local knowledge without collaborative scheme) and the collaborative scheme.
3. Collaborative Knowledge-Based WSN Proposal
3.1. Structure of the System
- Computer: edit KBs using linguistic labels (variables, fuzzy sets and rules), access the sensor network, communicate with sensors, monitor sensor state, etc.
- Sensor network: allow sensors and computer to communicate. The network consists of an access point and a set of sensor nodes with sensing capability, data processing and communicating capabilities.
- FRBS adapted to the sensors: infer the output by means of an inference engine and knowledge about the system.
- Application protocol: allow the elements of the system to communicate data and knowledge.
- Collaborative scheme: share and fuse data and knowledge between sensors and computer.
3.2. Fuzzy Rule-Based System Adapted to a Sensor Node
- A KB, which stores knowledge about the problem. The KB is composed of a Data Base (DB), which contains the linguistic term sets considered in the linguistic rules, and a fuzzy control Rule Base (RB), which comprises the collection of linguistic rules representing expert knowledge in the following form: where Xi are input variables, Ai are fuzzy sets related to the input variables, Y is the output variable and B is a fuzzy set related to the output variable.
- A fuzzy inference engine is composed of the following:
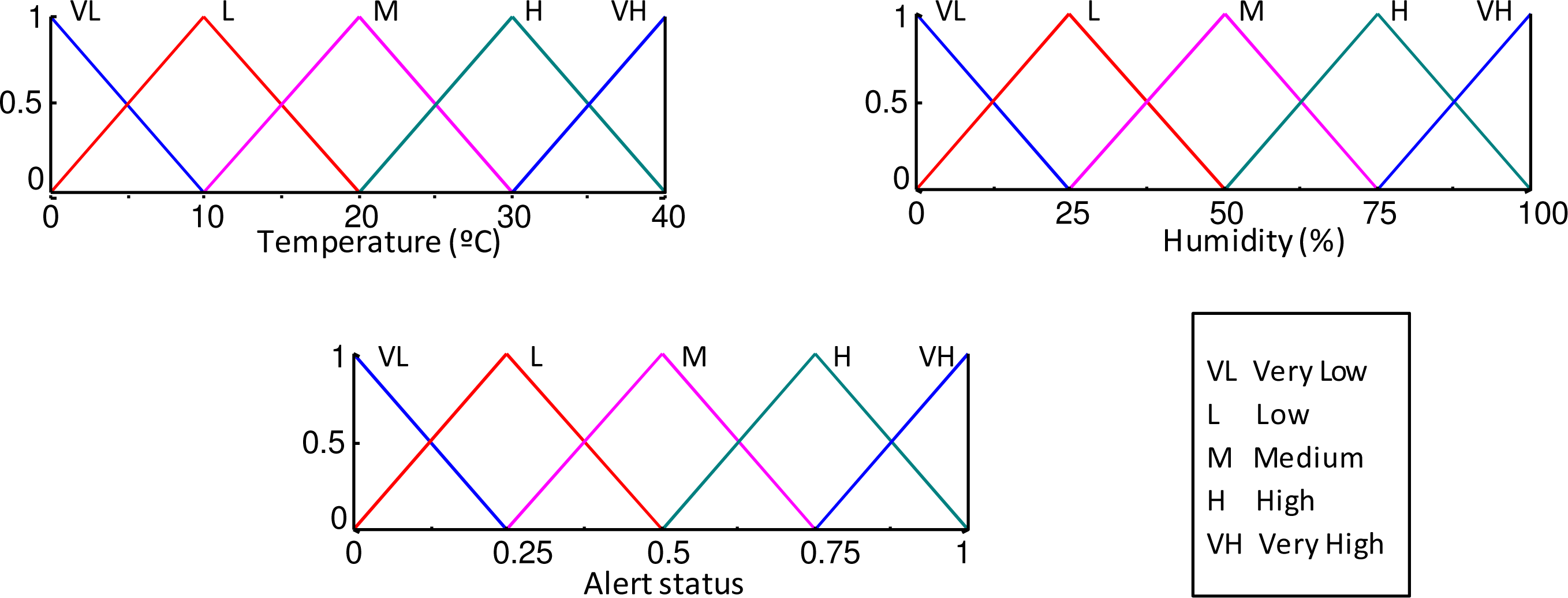
- A fuzzification interface, which transfers the values of the input variables into fuzzy information, assigning grades of membership to each fuzzy set defined for that variable;
- An inference system, which infers fuzzy actions by means of fuzzy implications and the rules of inference of fuzzy logic;
- A defuzzification interface, which yields a non-fuzzy control action from an inferred fuzzy control action. This interface aggregates the information provided by the output fuzzy sets to obtain an output value from them.
- An approach in which sensor nodes execute a small, but complete, FRBS;
- Only triangular or trapezoidal fuzzy sets be made available, which decreases the number of operations executed in the inference process;
- The input and output interfaces only admit linear conversions;
- A First Infer Then Aggregate (FITA) inference approach be used;
- Experts define the knowledge by means of linguistic labels, variables and rules, editing a KB in the computer. The KB is then translated into appropriate numerical values that are transmitted to the sensors.
- The inference engine work with numerical values of variables, fuzzy sets and rules instead of linguistic labels. The translation of linguistic labels is executed in the computer, so the sensor nodes do not have to do this task;
- The number of fuzzy sets defined in each variable be small. Although there is not a direct relationship between the number of fuzzy sets defined in each variable and the inference time, an excessive number of fuzzy sets would involve a large number of rules, and as a consequence, the inference time would increase.
- Sensors operate in a work cycle in which they first infer the output, and then are configured in a sleep mode;
- Sensors only transmit remarkable outputs to their neighbors (e.g., when an inferred alert surpasses a threshold).
3.3. Application Protocol
- Transmit elements of a DB to sensors, including the number of variables in the KB, number of fuzzy sets in each variable, the fuzzy set associated with each variable, the type of each variable (local or remote) and the data range of each crisp value;
- Transmit elements of a RB to sensors, including the number of rules, number of propositions in the antecedent as well as the antecedent and consequent themselves;
- Transmit values of input and output variables among sensors or between a sensor and the computer.
- Perform operations such as add, update, delete or activate a KB; define the interval between inferences and remain in sleep mode or in active mode between inferences.
- Register the state of system variables, so as to register a variable and obtain the value of variables in order to represent them in the computer, etc.
- The computer and every sensor have a communication agent, which has been developed in Java;
- The application protocol utilizes transport layer services which are available in WSNs (connection-oriented, connectionless and broadcast);
- An Application Protocol Data Unit (APDU) has been defined to support the protocol commands and responses between nodes (computer and sensors). In this work, the following commands have been utilized:
- KBs transmission. Based on a connection-oriented service, this command allows the computer to send a complete KB to the sensors.
- Variable values transmission. This command allows the sensor to send the value of an input variable or the value of an inference.
- Work cycle. The sleep mode interval between inferences is sent from the computer to sensors using a connection-oriented transport service.
- Alarm notification. Based on a connectionless broadcast service with only one hop, each sensor can notify remarkable variable values to neighbor sensors (e.g., when a variable surpasses a threshold).
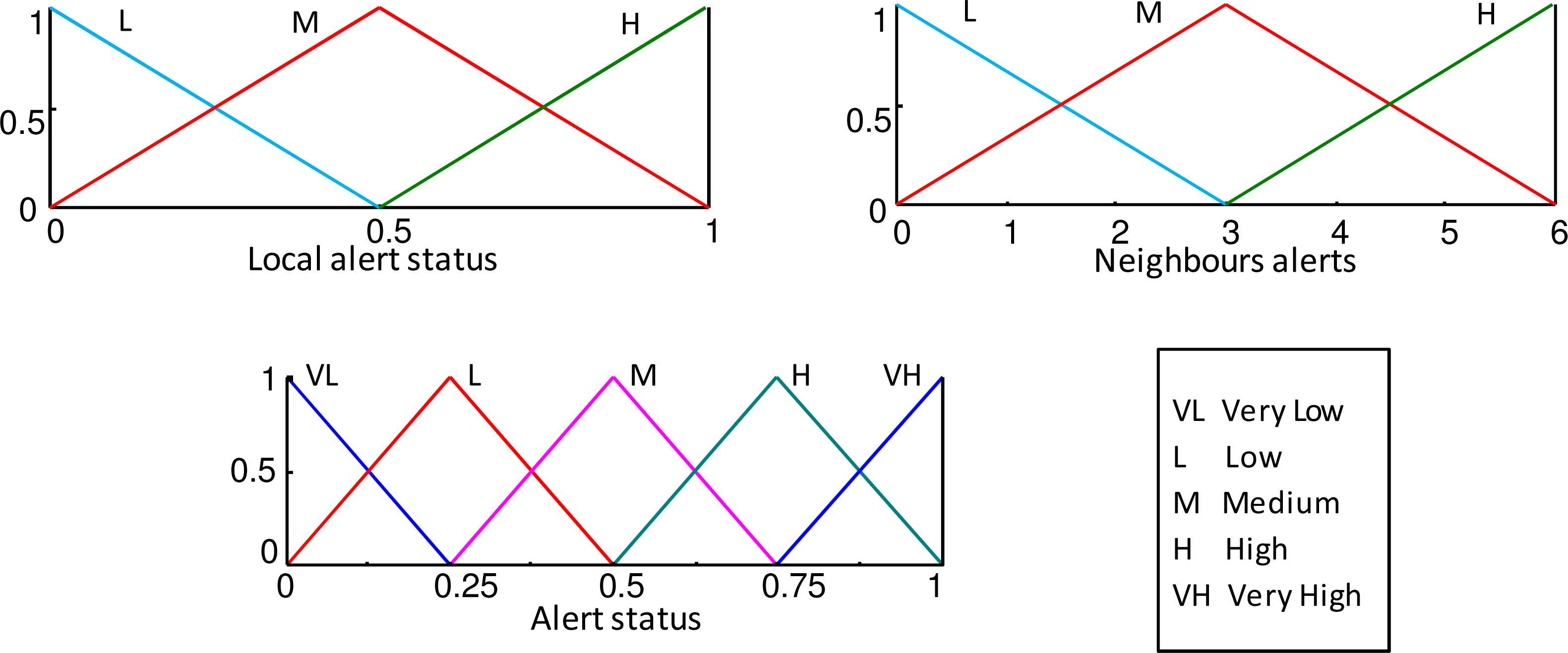
3.4. Collaborative Scheme
3.4.2. Integration of Data and Knowledge
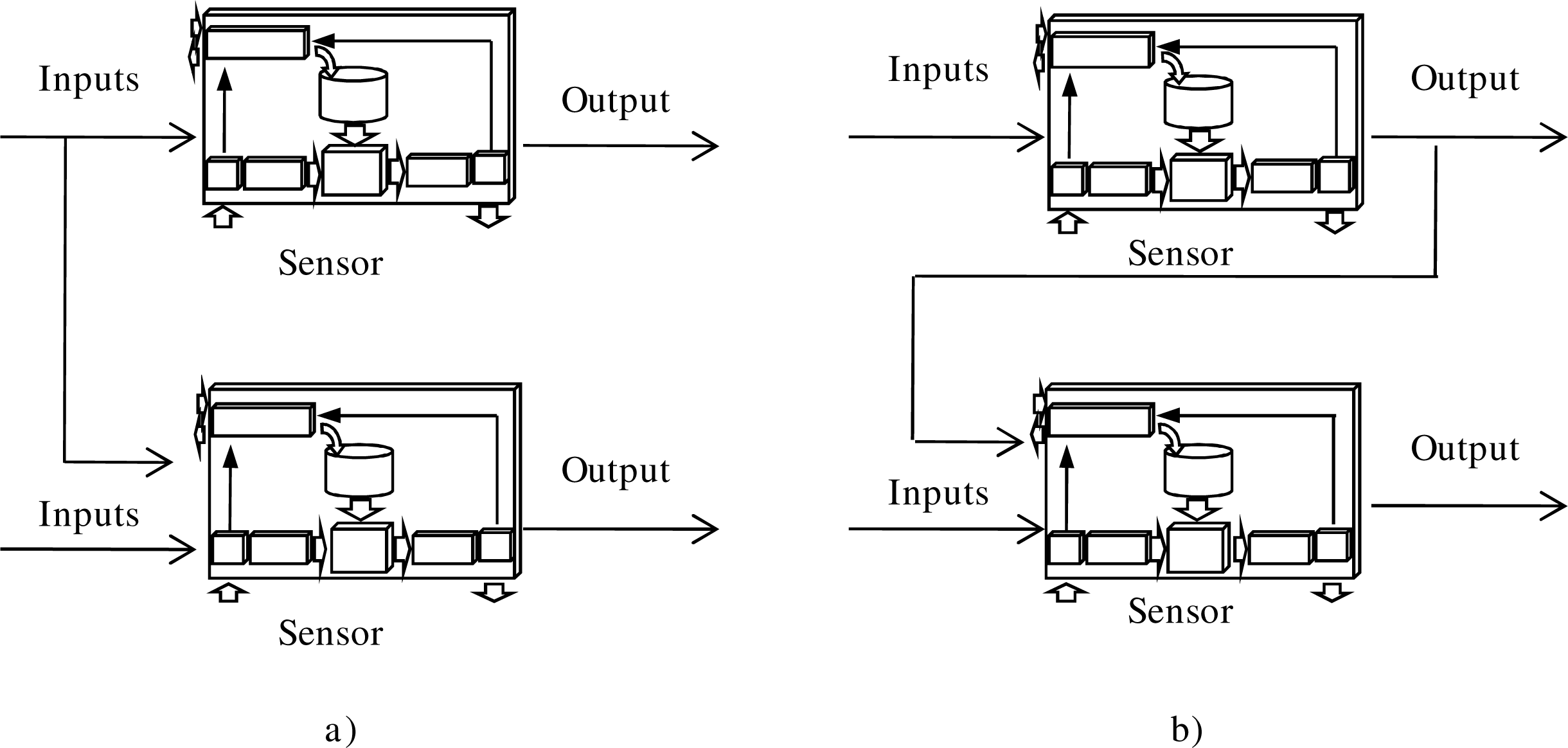
- Utilize only a KB, which incorporates local and remote information. Remote variables and rules are added to the KB so that the rules are able to use external data in their inferences. The inference engine will then take into account those remote rules if remote information is available.
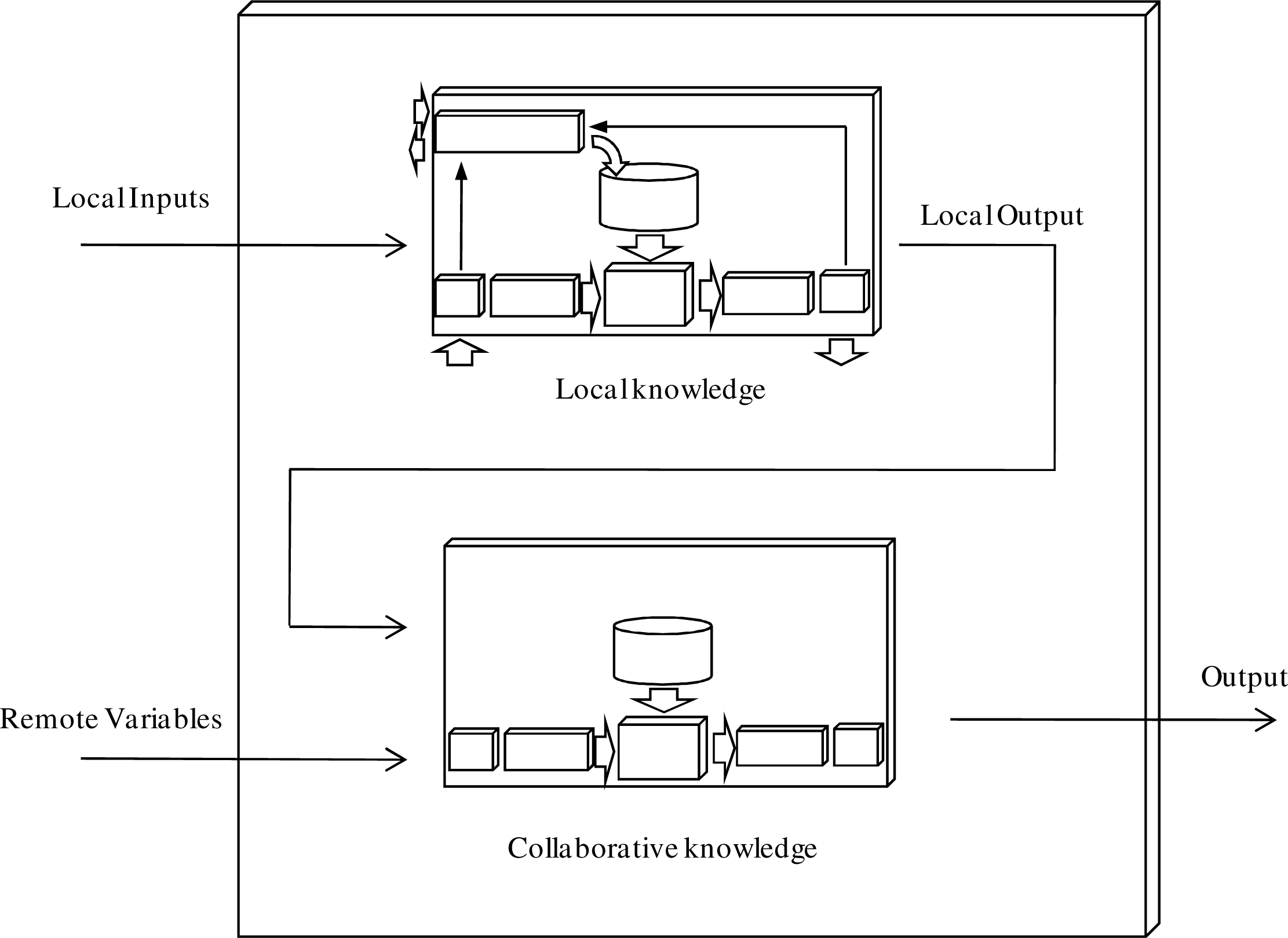
- Incorporate a complete collaborative KB (Figure 3). In this method the sensor utilizes a KB with local information (data and knowledge) and another complete KB with collaborative information (remote data and knowledge). In this case, the local output and remote variables represent inputs to a second FRBS. After inferring the output based on the local knowledge base, the inference engine will take into account the collaborative KB, which makes available all the external information. This method presents additional advantages: the number of rules is smaller and the rules are more interpretable because of the two KBs.
- Finally, the third option is to design a hierarchical system (using several KBs) in which local and remote data and KBs can be mixed.
4. Experimental Results
4.1. Knowledge-Based Sensor Performance
4.2. Application Protocol Performance
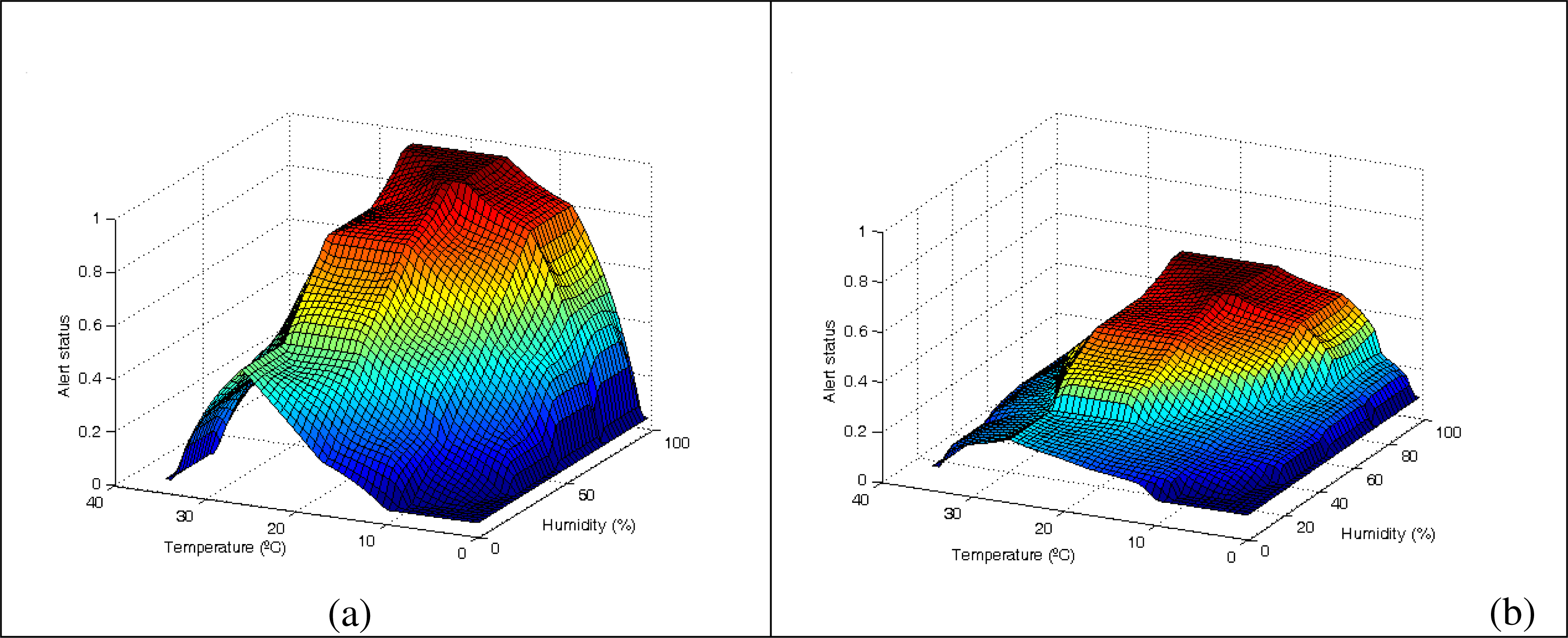
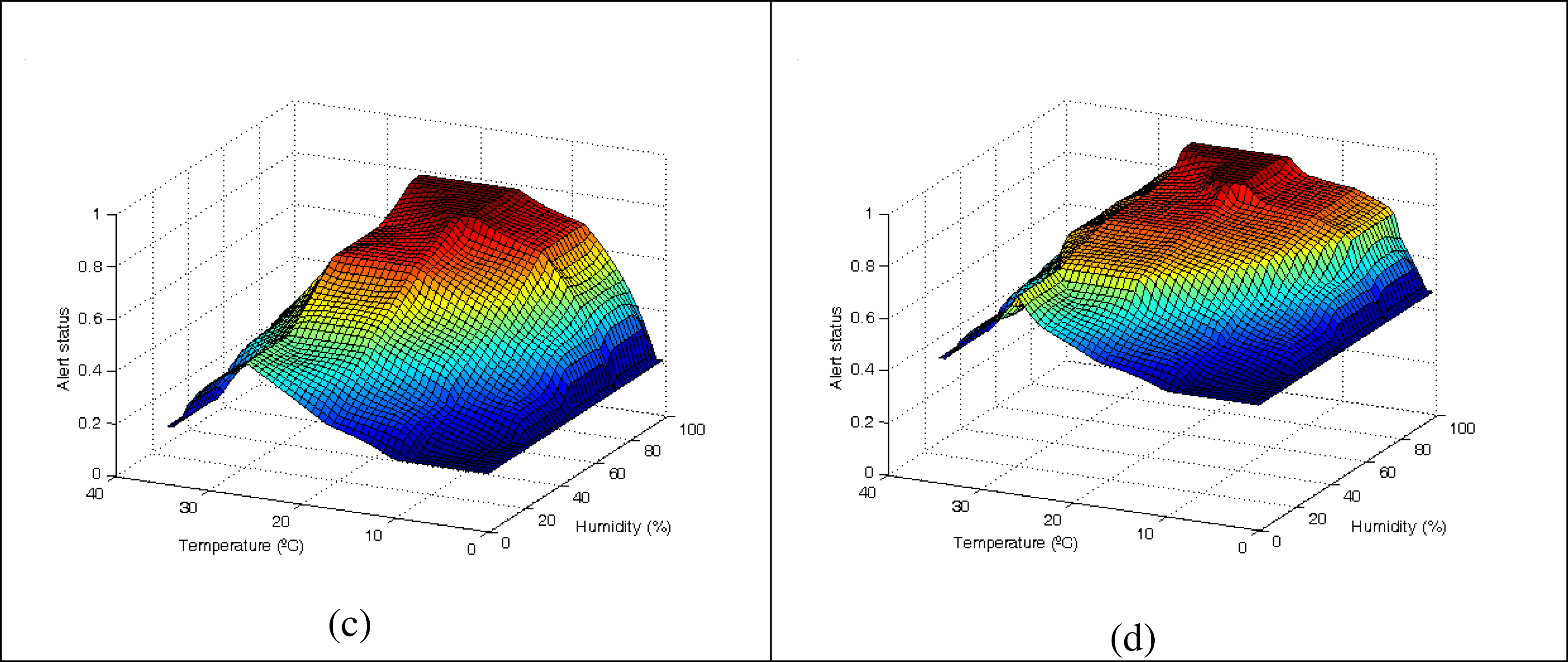
4.3. Evaluation of the Collaborative Scheme
- Figure 7a presents a high risk/peak value and decreases quickly, so it surpasses the threshold level only in areas of low humidity and temperature.
- Figure 7b presents a low risk/peak value, and does not surpass the threshold level.
- Figure 7c presents a medium risk/peak value and decreases quickly, so it surpasses the threshold level only in an area of very low humidity and temperature.
- Figure 7d presents a high risk/peak value and decreases slowly, so it surpasses the threshold level in a large area of humidity and temperature.
5. Conclusions
Acknowledgments
References
- Akyildiz, I.K.; Su, W.; Sankarasubramaniam, Y.; Cyirci, E. Wireless sensor networks: a survey. Comput. Netw 2002, 38, 393–422. [Google Scholar]
- Karl, H.; Willig, A. Protocols and Architectures for Wireless Sensor Networks; John Wiley & Sons: Chichester, West Sussex, UK, 2007. [Google Scholar]
- Cordón, O.; Herrera, F.; Hoffmann, F.; Magdalena, L. Genetic Fuzzy Systems: Evolutionary tuning and learning of fuzzy knowledge bases; Zadeh, L., Hirota, K., Klir, G., Sanchez, E., Wang, P., Yager, R., Eds.; World Scientific Publishing: Singapore, 2001; Volume 19. [Google Scholar]
- Zadeh, L.A. Fuzzy Sets. Information Control 1965, 8, 338–353. [Google Scholar]
- Brignell, J. The future of intelligent sensors: a problem of technology or ethics? Sensor. Actuator. A 1996, 56, 11–15. [Google Scholar]
- Benoit, E.; Dapoigny, R.; Foulloy, L. Fuzzy-based intelligent sensor: modelling, design, application. Proceedings of the 8th IEEE International Conference on Emerging Technologies and Factory Automation, Juan les Pins, Antibes, France, October 2001; pp. 401–407.
- Dekneuvel, E. Intelligent Sensor: Analysis and Design. In Embedded System Handbook; Zurawski, R., Ed.; CRC Press Taylor and Francis Group: Boca Raton, FL, USA, 2006. [Google Scholar]
- Karlsson, B. Intelligent Sensor Networks—An Agent-Oriented Approach. Proceedings of the Workshop on Real-World Wireless Sensor Networks, Stockholm, Sweden, 2005.
- Mekid, S. Further structural intelligence for sensor cluster technology in manufacturing. Sensors 2006, 6, 557–577. [Google Scholar]
- Kulakov, A.; Davcev, D. Tracking of unusual events in wireless sensor networks based on artificial neural-networks algorithms. Proceedings of the International Conference on Information Technology: Coding and Computing, Las Vegas, NV, USA, 2005.
- Cui, X.; Hardin, T.; Ragade, R.; Elmaghraby, A. A swarm-based fuzzy logic control mobile sensor network for hazardous contaminants localization. Proceedings of the 1st International Conference on Mobile Ad hoc and Sensor Systems, Fort Lauderdale, FL, USA, 2004; pp. 194–203.
- Shu, H.; Liang, Q. Fuzzy optimization for distributed sensor deployment. Proceedings of IEEE Wireless Communications and Networking Conference, New Orleans, LA, USA, 2005; pp. 1903–1908.
- Gupta, I.; Riordan, D.; Sampalli, S. Cluster-head election using fuzzy logic for wireless sensor networks. Proceedings of the 3rd Annual Communication Networks and Services Research Conference, Halifax, Canada, 2005; pp. 255–260.
- Chan, W.; Qidwai, U. Intelligent sensor network for obstacle avoidance strategy. Proceedings of the 4th IEEE International Conference on Sensors, Irvine, CA, USA, 2005.
- Feng, X.; Wenhong, Z.; Youxian, S.; Yu-Chu, T. Fuzzy logic control based QoS management in wireless sensor actuator networks. Sensors 2007, 7, 3179–3191. [Google Scholar]
- Norden, W.; Jong, J.; Bolderheij, F.; Rothkrantz, L. Intelligent Task Scheduling in Sensor Network. Proceedings of the 8th International Conference on Information Fusion, Philadelphia, PA, USA, 2005; pp. 1351–1358.
- Averkin, A. Soft Computing in Wireless Sensors Networks. Proceeding of the 5th Conference of the European Society for Fuzzy Logic and Technologies, Ostrava, Czech Republic, 2007; pp. 387–390.
- Srinivasan, T.; Chandrasekar, R.; Vijaykumar, V. A fuzzy, energy-efficient scheme for data centric multipath routing in wireless sensor networks. Proceeding of the IFIP International Conference on Wireless and Optical Communications Networks, Bangalore, India, 2006.
- Marin-Perianu, M.; Havinga, P. A distributed fuzzy logic engine for rule-based wireless sensor networks. Proceeding of the 4th International Symposium on Ubiquitous Computing Systems, Tokio, Japan, 2007; pp. 86–101.
- Nakamura, E.; Loureiro, A.; Frery, A. Information Fusion in Wireless Sensor Networks: Methods, Models, and Classifications. ACM Comput. Surv 2007, 39, 9:1–9:55. [Google Scholar]
- Yun, S.; Lee, J.; Chung, W.; Kim, E.; Kim, S. A soft computing approach to localization in wireless sensor networks. Expert Syst. Application 2009, 36, 7552–7561. [Google Scholar]
- Molina, G.; Alba, E. Location discovery in wireless sensor networks using metaheuristics. Applied Soft Computing 2010, in press.. [Google Scholar]
- Bahrepour, M.; Meratnia, N.; Havinga, P J.M. Use of AI techniques for residential fire detection in wireless sensor networks. the Proceeding of the Workshop of the 5th IFIP Conference on Artificial Intelligence Application and Innovations, Thessaloniki, Greece, 2009; pp. 311–321.
- Maaref, H.; Barret, C. Sensor-based fuzzy navigation of an autonomous mobile robot in an indoor environment. Control Eng. Prac 2000, 7, 757–768. [Google Scholar]
- Alonso, J.M.; Magdalena, L.; Guillaume, S.; Sotelo, M.A.; Bergasa, L.M.; Ocaña, M.; Flores, R. Knowledge-based Intelligent Diagnosis of Ground Robot Collision with Non Detectable Obstacles. J. Intell. Robotics Syst 2007, 48, 539–566. [Google Scholar]
- Gracanin, D.; Adams, K.; Eltoweissy, M. Data Replication in Collaborative Sensor Network Systems. Proceedings of the 25th IEEE International Performance, Computing, and Communications Conference, Phoenix, AZ, USA, 2006; pp. 389–396.
- Marron, P.J.; Minder, D. Cooperating Objects Roadmap and Conclusions. In Cooperating Embedded Systems and Wireless Sensor Networks, 1st ed; Banatre, M., Marron, P.J., Ollero, A., Wolisz, A., Eds.; John Wiley & Sons, Inc: Hoboken, NJ, USA, 2008; pp. 405–411. [Google Scholar]
- Ollero, A.; Wolisz, A.; Banatre, M. An introduction of the concept of cooperating objects and sensor networks. In Cooperating Embedded Systems and Wireless Sensor Networks, 1st ed; Banatre, M., Marron, P.J., Ollero, A., Wolisz, A., Eds.; John Wiley & Sons, Inc: Hoboken, NJ, USA, 2008; pp. 13–23. [Google Scholar]
- Canada-Bago, J. From a genetic fuzzy rule-based system to an intelligent sensor network. Proceedings of the 1st International Conference on Sensor Technologies and Applications, Valencia, Spain, 2007; pp. 373–377.
- Canada-Bago, J.; Gadeo-Martos, M.A.; Fernandez-Prieto, J.A.; Velasco, J.R. Poster Abstract: A Knowledge-Based Wireless Sensor Network. Proceedings of the 6th European Wireless Sensors Network (Demos/Posters Session), Cork, Ireland, 2009; pp. 21–22.
- Sun SPOT. Available online: https://www.sunspotworld.com/ (accessed on 20 January 2010).
- The Network Simulator ns-2. Available online: http://www.isi.edu/nsnam/ns (accessed on 21 January 2010).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Alert | Temperature | |||||
|---|---|---|---|---|---|---|
| Humidity | VL | L | M | H | VH | |
| VL | VL | VL | L | M | VL | |
| L | VL | L | M | M | VL | |
| M | VL | M | H | H | L | |
| H | VL | H | VH | H | L | |
| VH | VL | H | VH | VH | L | |
| Global Alert | Neighbor Alerts | |||
|---|---|---|---|---|
| Local Alert | L | M | H | |
| L | VL | L | M | |
| M | L | M | H | |
| H | M | H | VH | |
© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Canada-Bago, J.; Fernandez-Prieto, J.A.; Gadeo-Martos, M.A.; Velasco, J.R. A New Collaborative Knowledge-Based Approach for Wireless Sensor Networks. Sensors 2010, 10, 6044-6062. https://doi.org/10.3390/s100606044
Canada-Bago J, Fernandez-Prieto JA, Gadeo-Martos MA, Velasco JR. A New Collaborative Knowledge-Based Approach for Wireless Sensor Networks. Sensors. 2010; 10(6):6044-6062. https://doi.org/10.3390/s100606044
Chicago/Turabian StyleCanada-Bago, Joaquin, Jose Angel Fernandez-Prieto, Manuel Angel Gadeo-Martos, and Juan Ramón Velasco. 2010. "A New Collaborative Knowledge-Based Approach for Wireless Sensor Networks" Sensors 10, no. 6: 6044-6062. https://doi.org/10.3390/s100606044