Observing the Forest Canopy with a New Ultra-Violet Compact Airborne Lidar

Abstract
:1. Introduction
2. Experimental Setup
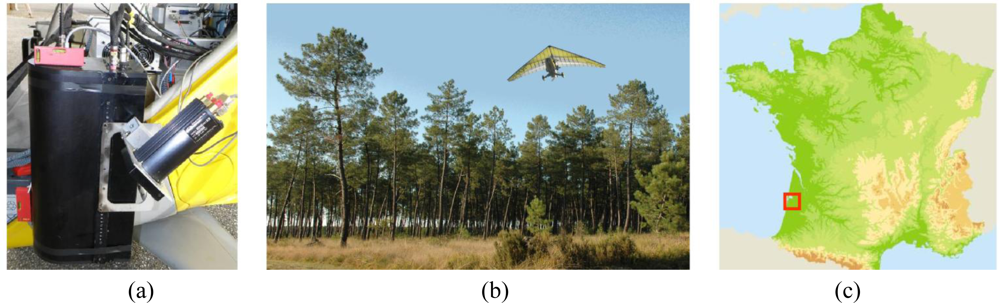
2.1. Canopy Lidar Payload Onboard an ULA
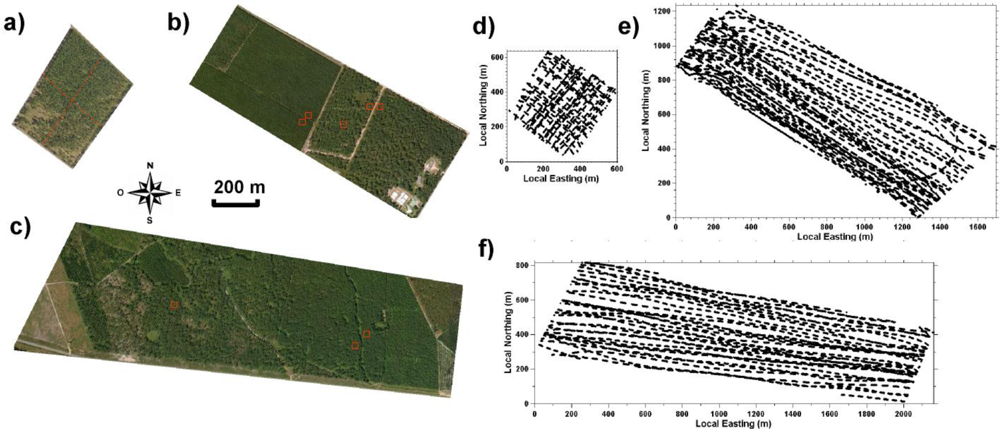
2.2. Test Areas
3. Processing Lidar Full Waveforms for Forest Structure Parameter Retrieval
- We use all lidar signals for a desired flying height (i.e., ∼300 m) and a pointing angle near nadir (i.e., <10° from nadir). Provided high enough signal-to-noise ratio (SNR) for LAUVAC waveforms, no filtering nor pre-processing for increasing the ranging accuracy is needed (see Section 3.1).
- For each waveform, we subtract the continuous component of noise (i.e., background noise from solar luminance and atmospheric scattering), which is estimated as the mean signal over 150 m above the canopy.
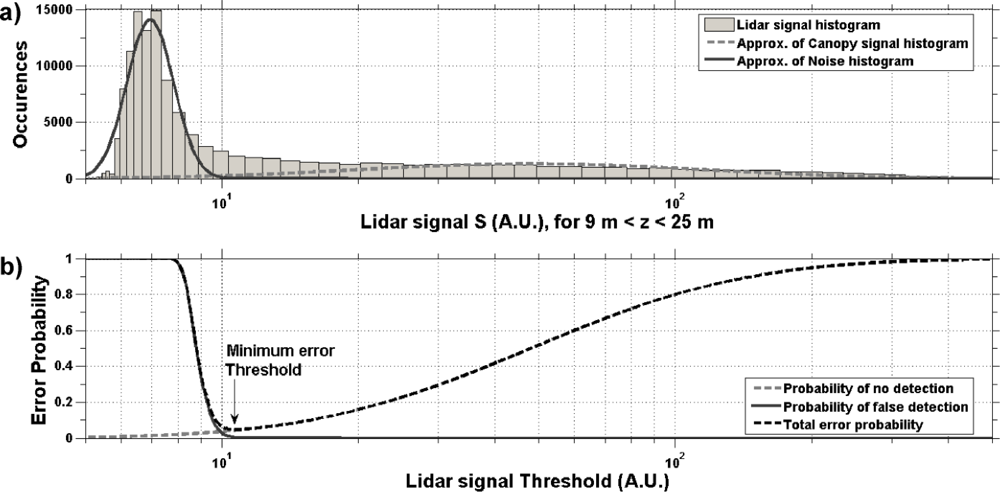
- Then, we retrieve relevant forest structure parameters (see Section 3.2) using a threshold method. We calculate a threshold value for each flight by distinguishing the histograms of canopy return signals (for the forest canopy and ground) and noise fluctuations (see Section 3.3).
- We determine the ground location for each waveform, verifying shot-to-shot consistency, and then we derive the structural parameters of the canopy above (see Section 3.4).
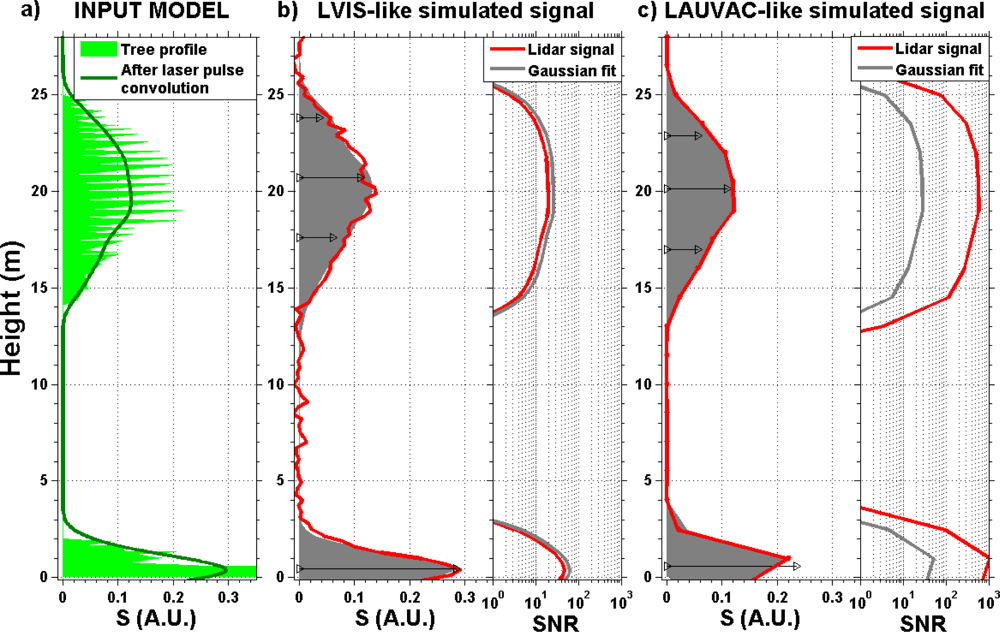
3.1. LAUVAC Lidar Signals
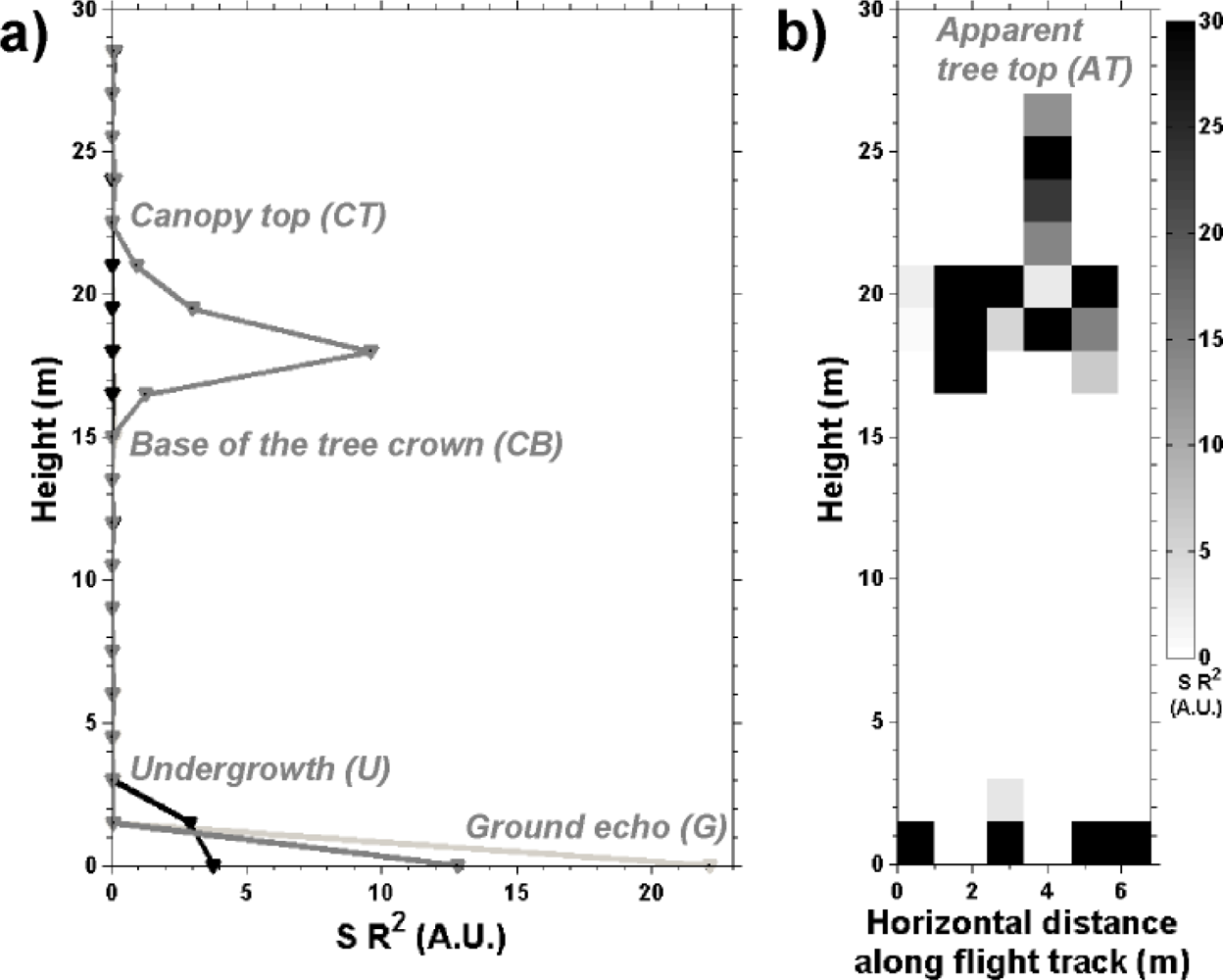
3.2. Canopy Structure Parameters
3.3. Threshold Method
3.4. Analysis of Horizontal Transects of Lidar Profiles
4. Results
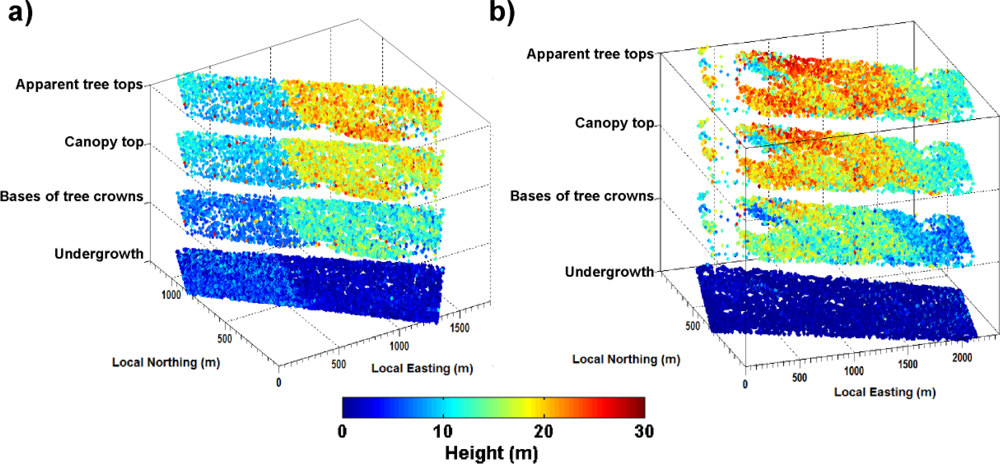
4.1. Overall 3D Canopy Structure
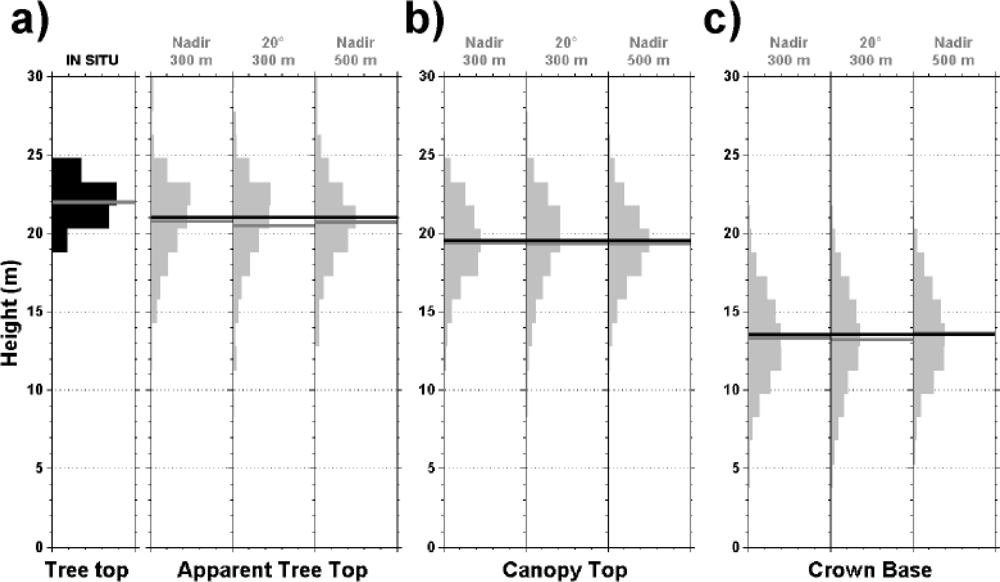
4.2. Statistical Comparison with in situ Measurements of a Forest Stand
4.3. Statistical Comparisons with in situ Measurements of Several Sample Plots
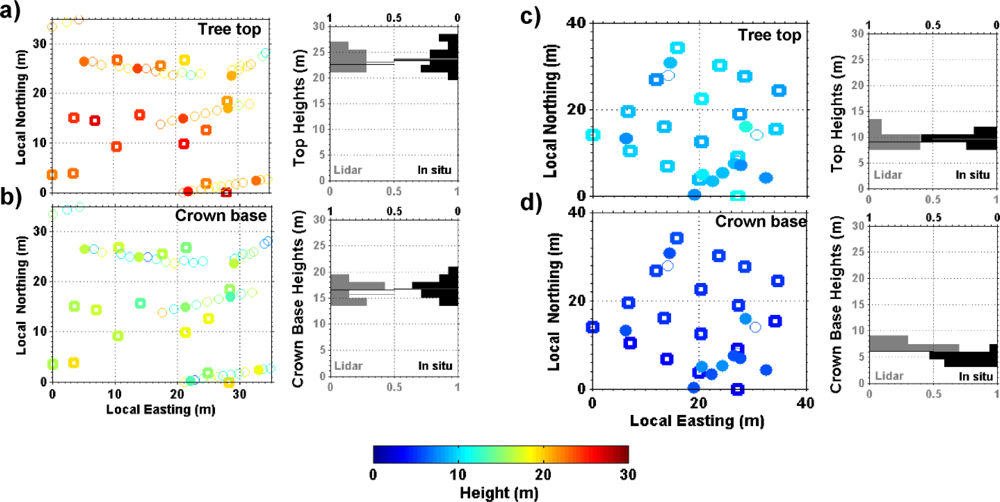
4.4. One-to-One Comparisons with in situ Measurements
5. Summary and Perspectives
Acknowledgments
References
- Bawa, KS; Seidler, R. Natural Forest Management and Conservation of Biodiversity in Tropical Forests. Conserv. Biol 1998, 12, 46–55. [Google Scholar]
- Bonan, GB; Pollard, D; Thompson, SL. Effects of Boreal Forest Vegetation on Global Climate. Nature 1992, 359, 716–718. [Google Scholar]
- Mund, M; Kummetz, E; Heina, M; Bauer, GA; Schulze, E-D. Growth and Carbon Stocks of a Spruce Forest Chronosequence in Central Europe. Forest Ecol. Manage 2002, 171, 275–296. [Google Scholar]
- McPherson, E; Nowak, DJ; Rowntree, RA. Chicago’s Urban Forest Ecosystem: Results of the Chicago Urban Forest Climate Project; General Technical Report NE-186; Pacific Northwest Research Station, U.S. Department of Agriculture, Forest Service: Radnor, PA, USA, 1994. [Google Scholar]
- Bolund, P; Hunhammar, S. Ecosystem Services in Urban Areas. Ecol Econ 1999, 29, 293–301. [Google Scholar]
- Watson, JG; Chow, J; Fujita, JM. Review of Volatile Organic Compounds Source Apportionment by Chemical Mass Balance. Atmos. Environ 2001, 35, 1567–1584. [Google Scholar]
- Mallet, C; Bretar, F. Full-Waveform Topographic Lidar: State-of-the-Art. ISPRS J. Photogramm 2009, 64, 1–16. [Google Scholar]
- Lefsky, MA; Harding, D; Cohen, WB; Parker, GG. Surface Lidar Remote Sensing of Basal Area and Biomass in Deciduous Forests of Eastern Maryland, USA. Remote Sens. Environ 1999, 67, 83–98. [Google Scholar]
- Lefsky, MA; Cohen, WB; Parke, GG; Harding, DJ. Lidar Remote Sensing for Ecosystem Studies. BioSci 2002, 52, 19–30. [Google Scholar]
- Tollefson, F. Climate: Counting Carbon in the Amazon. Nature 2009, 461, 1048–1052. [Google Scholar]
- Lefsky, MA; Harding, DJ; Keller, M; Cohen, WB; Carabajal, CC; Espirito-Santo, FD; Hunter, MO; Oliveira, R, Jr. Estimates of Forest Canopy Height and Aboveground Biomass using ICESat. Geophys. Res. Lett 2005, 32, 1–4. [Google Scholar]
- Chazette, P; Sanak, J; Dulac, F. New Approach for Aerosol Profiling with a Lidar Onboard an Ultralight Aircraft: Application to the African Monsoon Multidisciplinary Analysis. Environ. Sci. Technol 2007, 41, 8335–8341. [Google Scholar]
- Raut, J-C; Chazette, P. Assessment of Vertically-Resolved PM10 from Mobile Lidar Observations. Atmos. Chem. Phys 2009, 9, 8617–8638. [Google Scholar]
- Raut, J-C; Chazette, P. Radiative Budget in the Presence of Multi-Layered Aerosol Structures in the Frame of AMMA SOP-0. Atmos. Chem. Phys 2008, 8, 6839–6864. [Google Scholar]
- Dauzat, J; Stefas, M; Chauve, A; Caraglio, Y; Durrieu, S. Simulation de Mesures Lidar par Tracé de Rayons sur des Plantes Virtuelles. In Société Française de Photogrammétrie et Télédétection; Techniques laser pour létude des envrionnements naturels et urbains: Le Mans, France, 2009. [Google Scholar]
- Guyon, D; Berbigier, P; Courrier, G; Lagouarde, J-P; Moreau, P. Estimation du LAI dans un écosystème Cultivé de pin Maritime à partir de Mesures de Fractions de Trouées Directionnelles. J. Can. Télédétection 2003, 29, 336–348. [Google Scholar]
- Wagner, W; Ullrich, A; Ducic, V; Melzer, T; Studnicka, N. Gaussian Decomposition and Calibration of a Novel Small-Footprint Full-Waveform Digitising Airborne Laser Scanner. ISPRS J. Photogram. Rem. Sens 2006, 60, 100–112. [Google Scholar]
- Hofton, MA; Minster, JB; Blair, JB. Decomposition of Laser Altimeter Waveforms. IEEE Trans. Geosci. Rem. Sens 2000, 38, 1989–1996. [Google Scholar]
- Flamant, PH. Atmospheric and Meteorological Lidar: from Pioneers to Space Applications. C. R. Phys 2005, 6, 864–875. [Google Scholar]
- Chazette, P; Pelon, J; Mégie, G. Determination of Structural Parameters of Atmospheric Scattering Layer using Spaceborne Backscatter Lidar. Appl. Opt 2001, 40, 3428–3440. [Google Scholar]
- Berthier, S; Chazette, P; Pelon, J; Baum, B. Comparison of Cloud Statistics from Spaceborne Lidar Systems. Atmos. Chem. Phys 2008, 8, 6965–6977. [Google Scholar]
- Edner, H; Johansson, J; Svanberg, S; Wallinder, E. Fluorescence Lidar Multicolor Imaging of Vegetation. Appl Opt 1994, 33, 2471–2479. [Google Scholar]
- Malenovsky, Z; Mishra, KB; Zemek, F; Rascher, U; Nedbal, L. Scientific and Technical Challenges in Remote Sensing of Plant Canopy Reflectance and Fluorescence. J. Exp. Bot 2009, 60, 1–18. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LIDAR | Laser emission wavelength: 355 nm |
| Laser energy per pulse: 16 mJ (fulfilling eye-safety requirement) | |
| Laser pulse duration: 5 ns (1.5 m pulse length along the line-of-sight) | |
| Repetition rate: 20 Hz (it corresponds to 1 m horizontal spacing between canopy lidar profiles for 20 m s−1 ULA speed) | |
| Vertical resolution: 1.5 m (according to 100 MHz signal digitization and profiling at nadir) | |
| Laser divergence: 4 mrad (that corresponds to a 2.4 m-diameter footprint at a flying altitude of 300 m agl) | |
| Receiver field of view: 5 mrad | |
| Detector: photomultiplier tubes/analog direct detection | |
| Optical head dimensions: 45 × 28 × 18 cm3 | |
| Weight: 9 kg (optical head) + 20 kg (electronic unit) | |
| Electrical supply: 12 V battery (<500 W) | |
| Geo-referencing system | GPS: Lassen SK II by Trimble (±5 m at 1 Hz) |
| Artificial horizon: Dynon Avionics (±0.5 at 1 Hz) | |
| Ultra light Airplane | Maximal scientific payload: 120 kg |
| Flight speed: 17 to 40 m/s (60 to 145 km/h) | |
| Endurance: 4 h at 20 m/s (3 h at 40 m/s) | |
| Flight altitude: between 200 m and 5.8 km agl In practice 300 m and 500 m agl for canopy flights. |
| Structural parameter | Retrieval method | Whole area | NE quadrant | NW quadrant | SW quadrant | SE quadrant |
|---|---|---|---|---|---|---|
| Tree top TTH | in situ | 22.0/22.0 (1.2) | 22.1/21.9 (0.9) | n/a | 21.6/21.5 (1.2) | 22.1/22.3 (1.2) |
| Apparent tree top AT | 300 m Nadir | 21.2/21.0 (4.0) | 21.1/21.0 (4.1) | 21.3/21.0 (3.6) | 21.1/21.0 (4.6) | 21.2/21.0 (3.5) |
| 300 m 20° | 20.5/21.0 (3.4) | 19.6/19.5 (3.4) | 20.8/21.0 (3.6) | 21.9/22.5 (2.7) | 20.0/21.0 (3.5) | |
| 500 m Nadir | 20.7/21.0 (3.3) | 20.9/21.0 (2.8) | 20.9/21.0 (3.2) | 20.5/21.0 (3.3) | 20.5/21.0 (3.6) | |
| 500 m Nadir 1.5t | 19.9/19.5 (2.7) | 20.4/21.0 (2.4) | 20.3/21.0 (2.5) | 19.8/19.5 (2.6) | 19.5/19.5 (3.0) | |
| Tree top difference (TTH-AT) | 300 m Nadir | 1.0/1.0 | 1.0/0.9 | n/a | 0.5/0.5 | 0.9/1.3 |
| 300 m 20° | 1.7/1.0 | 2.5/2.4 | n/a | −0.3/−1.0 | 2.1/1.3 | |
| 500 m Nadir | 1.5/1.0 | 1.2/0.9 | n/a | 1.1/0.5 | 1.6/1.3 | |
| 500 m Nadir 1.5t | 2.3/2.5 | 1.7/0.9 | n/a | 1.8/2.0 | 2.6/2.8 | |
| Canopy Top CT | 300 m Nadir | 19.7/19.5 (3.1) | 19.9/19.5 (3.0) | 19.6/19.5 (2.9) | 19.7/19.5 (3.6) | 19.5/19.5 (3.1) |
| 300 m 20° | 19.3/19.5 (3.2) | 18.4/18.0 (3.3) | 19.5/19.5 (3.4) | 19.9/19.5 (2.9) | 19.2/19.5 (2.9) | |
| 500 m Nadir | 19.3/19.5 (2.8) | 19.4/19.5 (2.7) | 19.5/19.5 (2.8) | 19.2/19.5 (2.8) | 19.2/19.5 (2.9) | |
| 500 m Nadir 1.5t | 18.6/18.0 (2.6) | 18.8/19.5 (2.6) | 18.9/19.5 (2.5) | 18.5/18.0 (2.6) | 18.3/18.0 (2.6) | |
| Apparent crown base CB | 300 m Nadir | 13.5/13.5 (3.4) | 13.2/13.5 (3.0) | 13.7/13.5 (3.2) | 13.8/13.5 (3.9) | 13.0/13.5 (3.1) |
| 300 m 20° | 13.2/13.5 (3.5) | 12.5/12.0 (3.6) | 13.2/13.5 (3.7) | 13.7/13.5 (3.5) | 13.2/13.5 (3.4) | |
| 500 m Nadir | 13.6/13.5 (3.2) | 13.5/13.5 (3.1) | 13.8/13.5 (3.0) | 13.5/13.5 (3.1) | 13.6/13.5 (3.3) | |
| 500 m Nadir 1.5t | 13.5/13.5 (2.9) | 13.5/13.5 (2.9) | 13.9/13.5 (2.7) | 13.5/13.5 (2.8) | 13.4/13.5 (3.0) |
| Same plot | Location of plot centre | Tree top | Canopy top | Crown base | ||||
|---|---|---|---|---|---|---|---|---|
| TTH (in situ) | AT (lidar) | TTH–AT | CT (lidar) | CB IS (in situ) | CB (lidar) | CB IS–CB | ||
| #M1A | 580 LE 600 LN | 9.1/9.2 (0.8) | 9.4/9.0 (0.8) | −0.3/0.2 | 9.3/9.0 (0.6) | 5.3/5.4 (0.6) | 6.8/6.8 (0.9) | −1.5/−1.4 |
| #M1B | 615 LE 660 LN | 9.5/9.4 (0.9) | 8.8/9.0 (1.5) | 0.7/0.4 | 8.7/9.0 (1.4) | 4.5/4.7 (0.8) | 6.5/6.0 (0.7) | −2.0/−1.3 |
| #M1C | 780 LE 610 LN | 19.8/19.5 (1.1) | 20.3/21.0 (1.5) | −0.5/−1.5 | 17.7/18.0 (2.3) | 14.2/14.4 (1.5) | 15.4/15.8 (2.6) | −1.2/−1.4 |
| #M1D | 930 LE 690 LN | 21.9/22.1 (0.9) | 21.0/21.0 (2.1) | 0.9/1.1 | 18.0/18.0 (2.7) | 15.8/15.4 (1.0) | 15.4/14.3 (2.4) | 0.4/1.1 |
| #M1E | 1050 LE 690 LN | 21.9/21.4 (1.2) | 21.8/21.8 (1.1) | 0.1/−0.4 | 17.6/18.8 (4.4) | 15.8/15.7 (0.9) | 18.8/18.8 (1.1) | −3.0/−3.1 |
| #M2A | 850 LE 330 LN | 20.8/20.5 (1.9) | 19.7/19.5 (2.0) | 1.1/1.0 | 19.1/19.5 (1.1) | 13.8/14.3 (4.0) | 13.5/13.5 (3.0) | 0.3/0.8 |
| #M2B | 1630 LE 170 LN | 23.6/23.4 (2.2) | 22.9/22.5 (1.7) | 0.7/0.9 | 19.7/21.0 (3.2) | 16.7/16.6 (1.7) | 15.6/16.5 (1.7) | 1.1/0.1 |
| #M2C | 1700 LE 210 LN | 16.0/16.4 (1.2) | 15.4/15.0 (2.1) | 0.6/1.4 | 14.1/15.0 (2.7) | 10.3/10.2 (0.6) | 10.3/9.0 (2.8) | 0.0/1.2 |
© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Cuesta, J.; Chazette, P.; Allouis, T.; Flamant, P.H.; Durrieu, S.; Sanak, J.; Genau, P.; Guyon, D.; Loustau, D.; Flamant, C. Observing the Forest Canopy with a New Ultra-Violet Compact Airborne Lidar. Sensors 2010, 10, 7386-7403. https://doi.org/10.3390/s100807386
Cuesta J, Chazette P, Allouis T, Flamant PH, Durrieu S, Sanak J, Genau P, Guyon D, Loustau D, Flamant C. Observing the Forest Canopy with a New Ultra-Violet Compact Airborne Lidar. Sensors. 2010; 10(8):7386-7403. https://doi.org/10.3390/s100807386
Chicago/Turabian StyleCuesta, Juan, Patrick Chazette, Tristan Allouis, Pierre H. Flamant, Sylvie Durrieu, Joseph Sanak, Pascal Genau, Dominique Guyon, Denis Loustau, and Cyrille Flamant. 2010. "Observing the Forest Canopy with a New Ultra-Violet Compact Airborne Lidar" Sensors 10, no. 8: 7386-7403. https://doi.org/10.3390/s100807386