1. Introduction
The value of hyperspectral imagery in detecting evidence of thin gaseous plumes is dependent upon the ability of the analysis tools to detect those materials when they are present. If an image collection mission is being planned, information should be available regarding the scene background and the anticipated materials of interest. In this paper we investigate methods for using image analysis tools to predict the minimum detectable concentration-pathlength (MDCL) for plumes over specific backgrounds prior to image collection. The intent is to develop an approach for determining under what conditions gases of interest can be detected over specific backgrounds and at what minimum concentration-pathlengths.
Estimating MDCLs for thin gaseous plumes using thermal imaging data is complicated by many factors. Methods for gas plume detection have been studied extensively and are reviewed by various authors [
1–
4]. Very often the approach is to evaluate specific gases over specific backgrounds and temperature emissivity (TE) contrasts. The difficulties with this approach for mission planning is that small gas libraries result in efficient searching but risk missed detections because member gases may not cover all the gases in the image. Large libraries result in slower searching and can have multiple detections because of spectral feature overlap.
An alternative approach to the detection problem with gas libraries is described by Chilton and Walsh [
5]. They use a set of basis vectors (BV) consisting of one BV for each spectral channel. The BV for channel
n has a 1 in the
n-th location and zeros elsewhere. Their results show that applying a whitened-matched filter to each BV in succession will identify spectral channels with anomalous activity. The library in this case is the set of BVs that correspond to each spectral channel and is defined by the resolution and bandwidth of the image. This approach is useful for detection because it spans the full spectral dimension of the image and is agnostic to individual gas characteristics, thus resolving the issue of missed detections because of mismatches between image gases and library members.
In this paper we extend the application of BVs to estimate the noise-equivalent concentration-pathlength (NECL) for pixels in an image or image segment, relate the NECL to the signal-to-noise ratio (SNR) for an image or image segment, and estimate the MDCL for gases that have a single dominant spectral peak. We validate our MDCL results by injecting gases into an AHI image and using whitened-matched filtering to get empirical probabilities of detection (Pd) and false detection probabilities (Pfa). We compare the empirical results to the MDCL predictions at those Pd and Pfa values. Extension of these results to gases with multiple peaks warrants further research.
3. Application
As an illustration of the method proposed above, the AHI image with no plume was used. This image was collected with the Airborne Hyperspectral Imager built by the University of Hawaii and provided to us by the Chester F. Carlson Center for Imagery Science at Rochester Institute of Technology (RIT). The spectra are in 50 channels corresponding to wavelengths from 8.094 to 11.533
μm. The ground temperatures and ground emissivities were extracted from the image using the OLSTER algorithm developed by Boonmee
et al. [
6] at RIT.
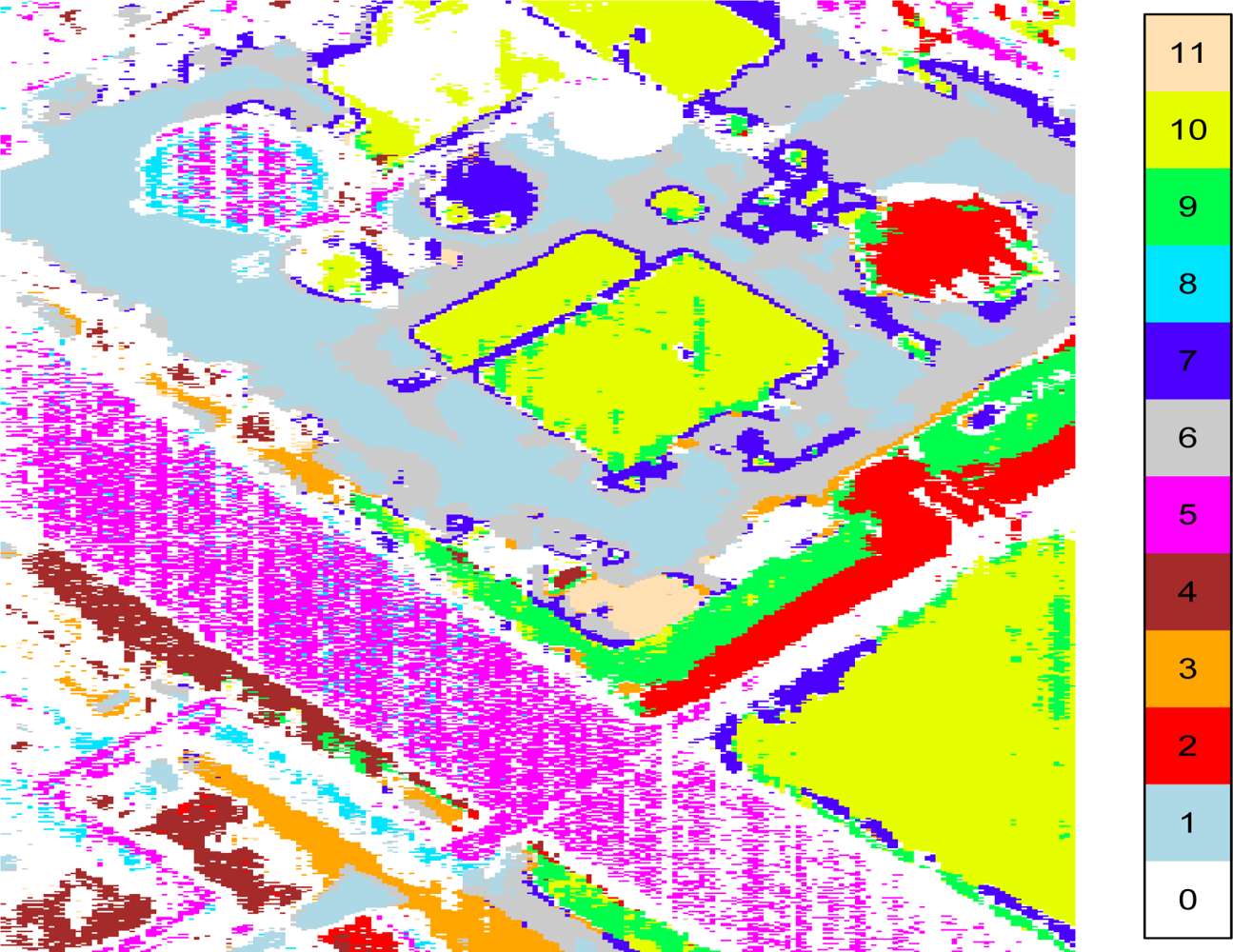
A k-th nearest neighbor approach was used to extract 11 endmembers from the ground emissivities. Each pixel was assigned to groups associated with these 11 endmembers based on the correlation of its ground emissivity to the endmembers. If no correlation was greater than 0.8, the pixel was not assigned to any of the 11 groups, which created a “group 0” of unassigned pixels. This conservative approach to image segmentation left a large proportion of the pixels unassigned. Having 11 endmembers to segment the image and using 0.8 as the minimum correlation coefficient value are arbitrary choices to get clear distinctions among the groups and lower the within-group variances to demonstrate the BV-NECL method. The numbers of pixels assigned to the 12 groups are given in
Table 1. There were enough pixels in each group to calculate by-group BV-NECL values.
Figure 1 shows the segmentation of the AHI scene into the 11 groups.
The robust averages and standard deviations of the ground temperature of the pixels in each group are also given in
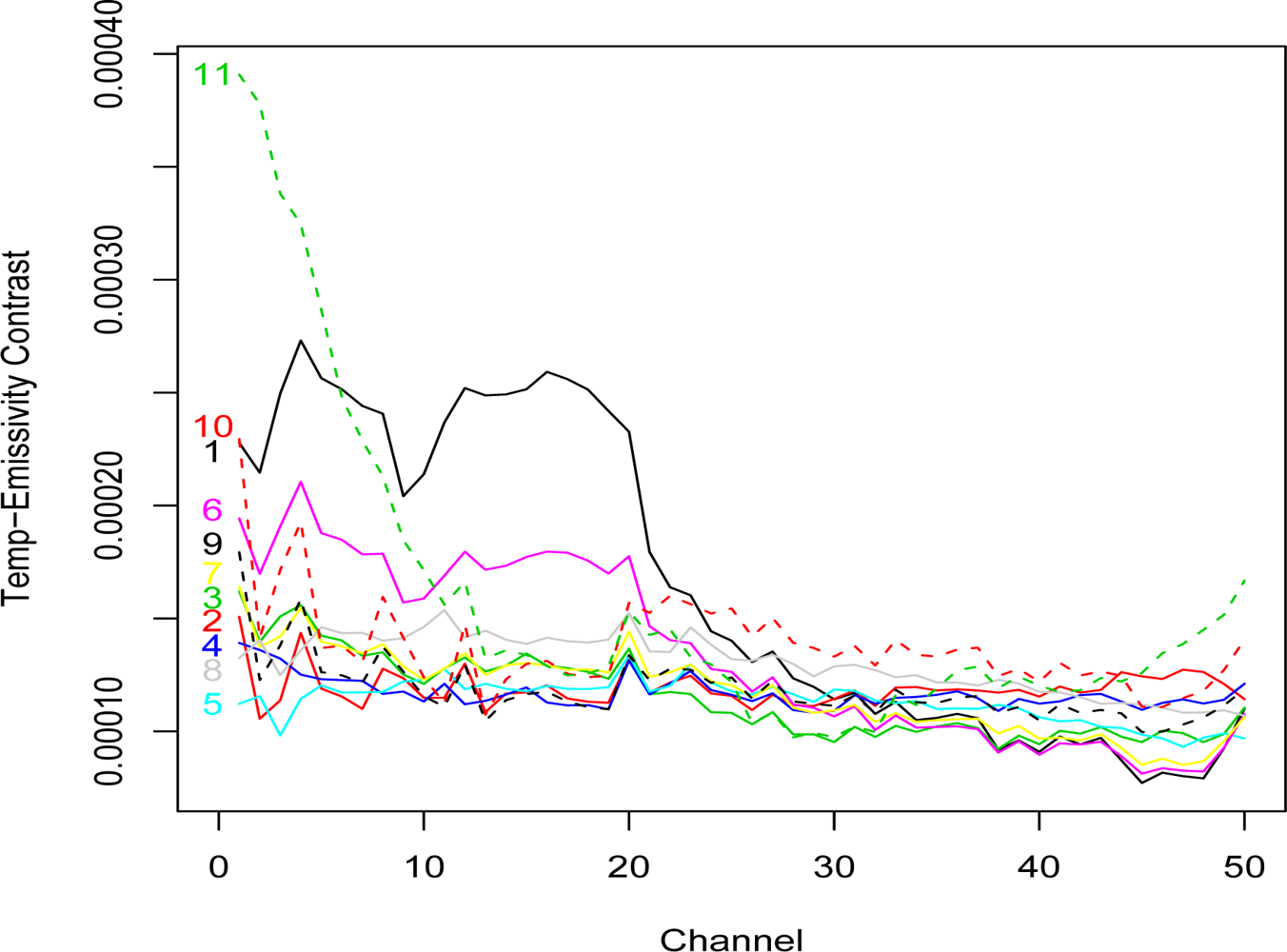
Table 1. For comparison, the robust average and standard deviation of the ground temperature for the unsegmented scene are 308.7 °K and 5.87 °K, respectively. These individual group average ground temperatures and a 5 °K hotter plume temperature were used to compute the temperature-emissivity contrast for each of the 11 endmembers, see
Figure 2.
The robust variancemethod used here was developed by Cressie and Hawkins [
8]. The robust variance formula for a random sample of size
n, {
X1,
X2, . . .,
Xn}, is
where
X̄ is either the mean or trimmed-mean of the sample. We used the middle 90% of the data to calculate a 5% trimmed mean.
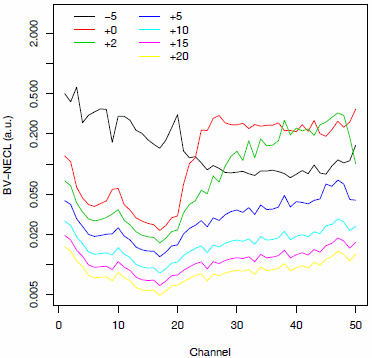
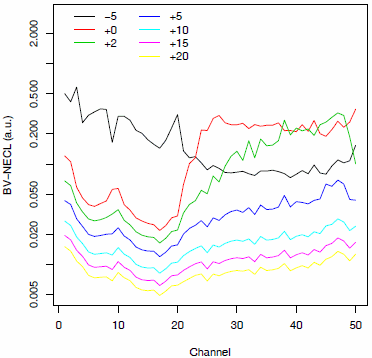
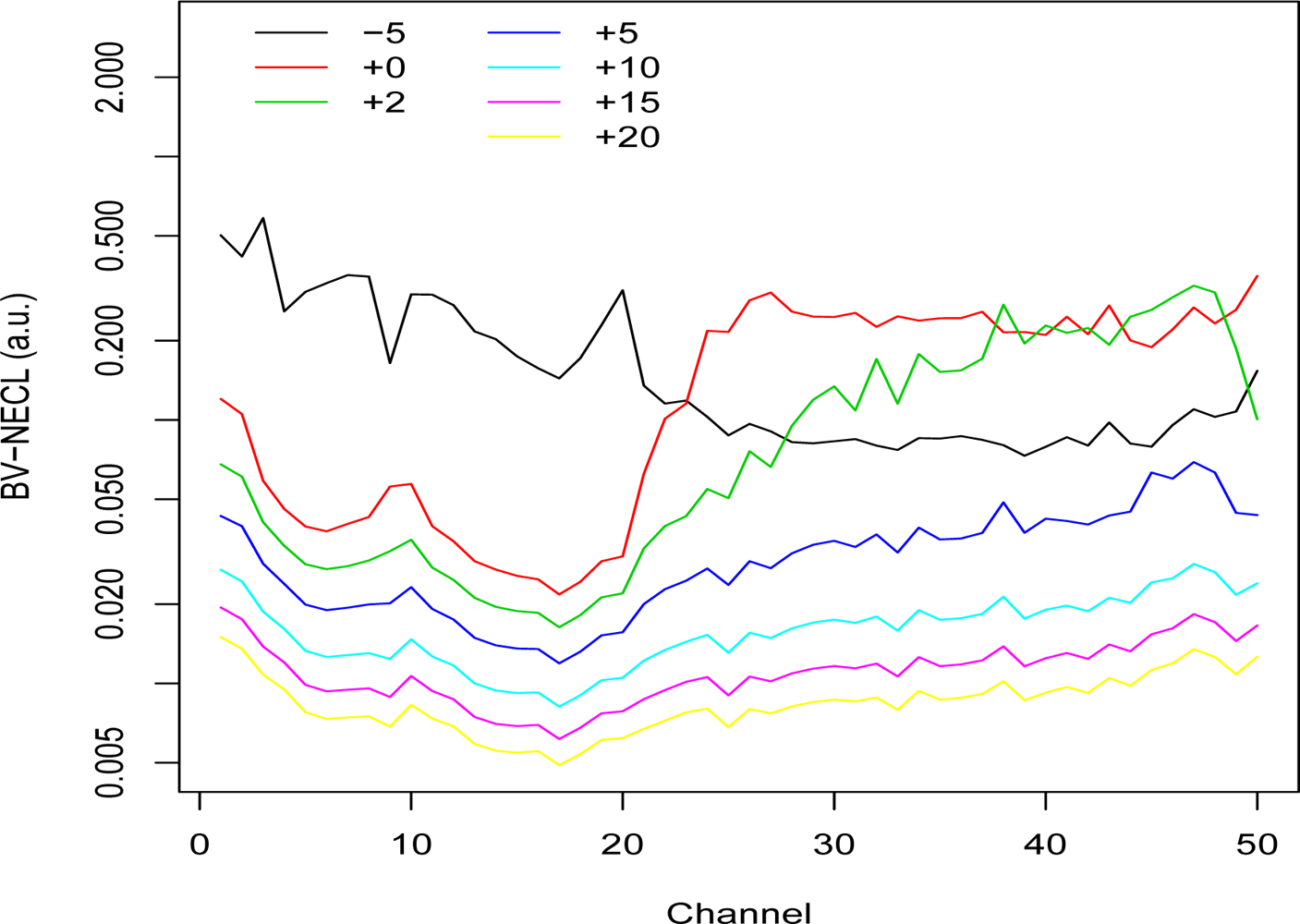
The pixels in each of the 11 groups were mean-centered and then whitened match filtered using the set of basis vectors instead of a particular gas and 7 different plume temperatures: −5, 0, +2, +5, +10, +15, and +20 °K from the average ground temperature of the group. The BV-NECL values for each group were then estimated using a robust standard deviation of the whitened match filter results. The trimmed mean and robust variance method were used to estimate the BV-NECL values in order to stabilize the estimates in the presence of extreme values.
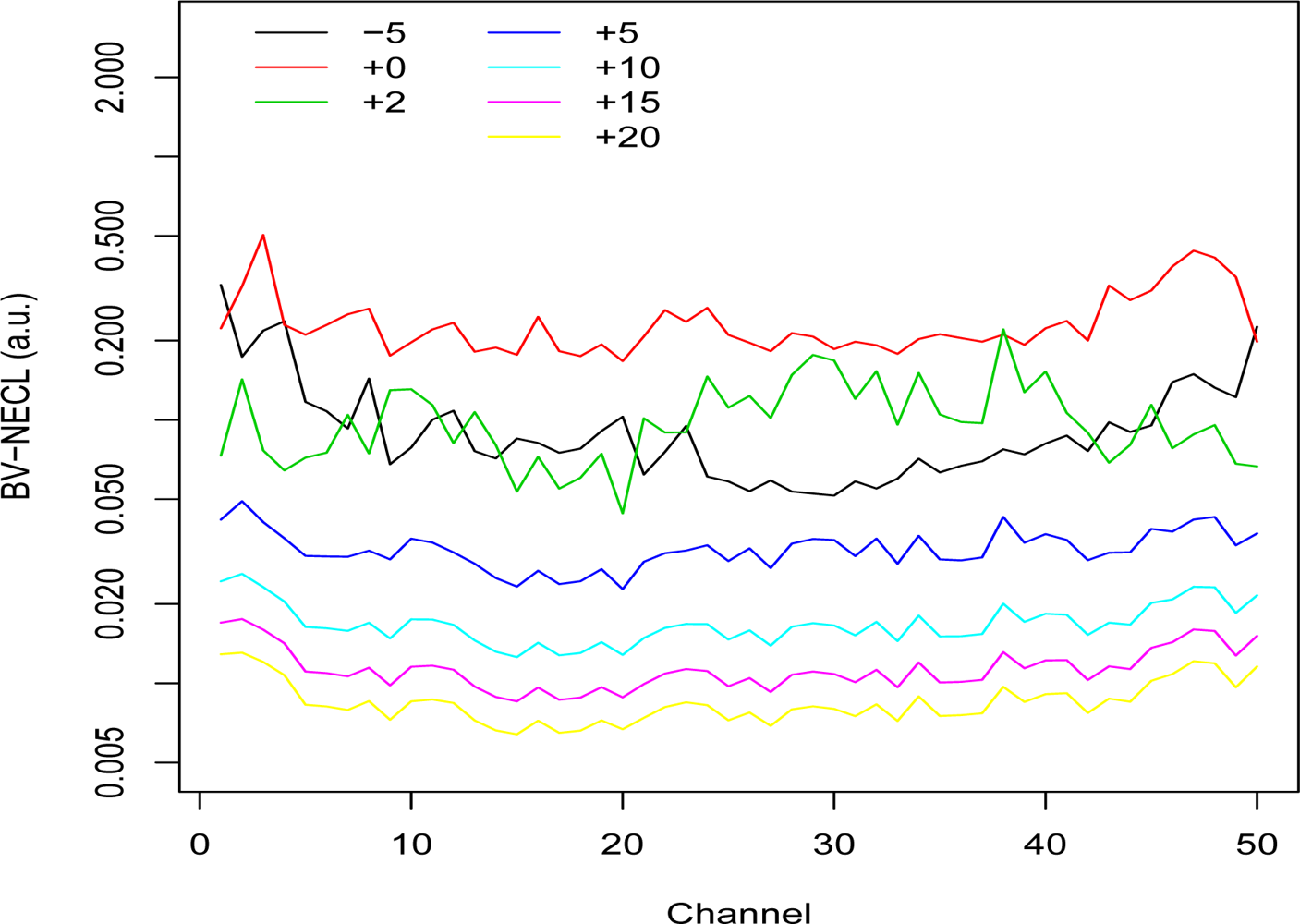
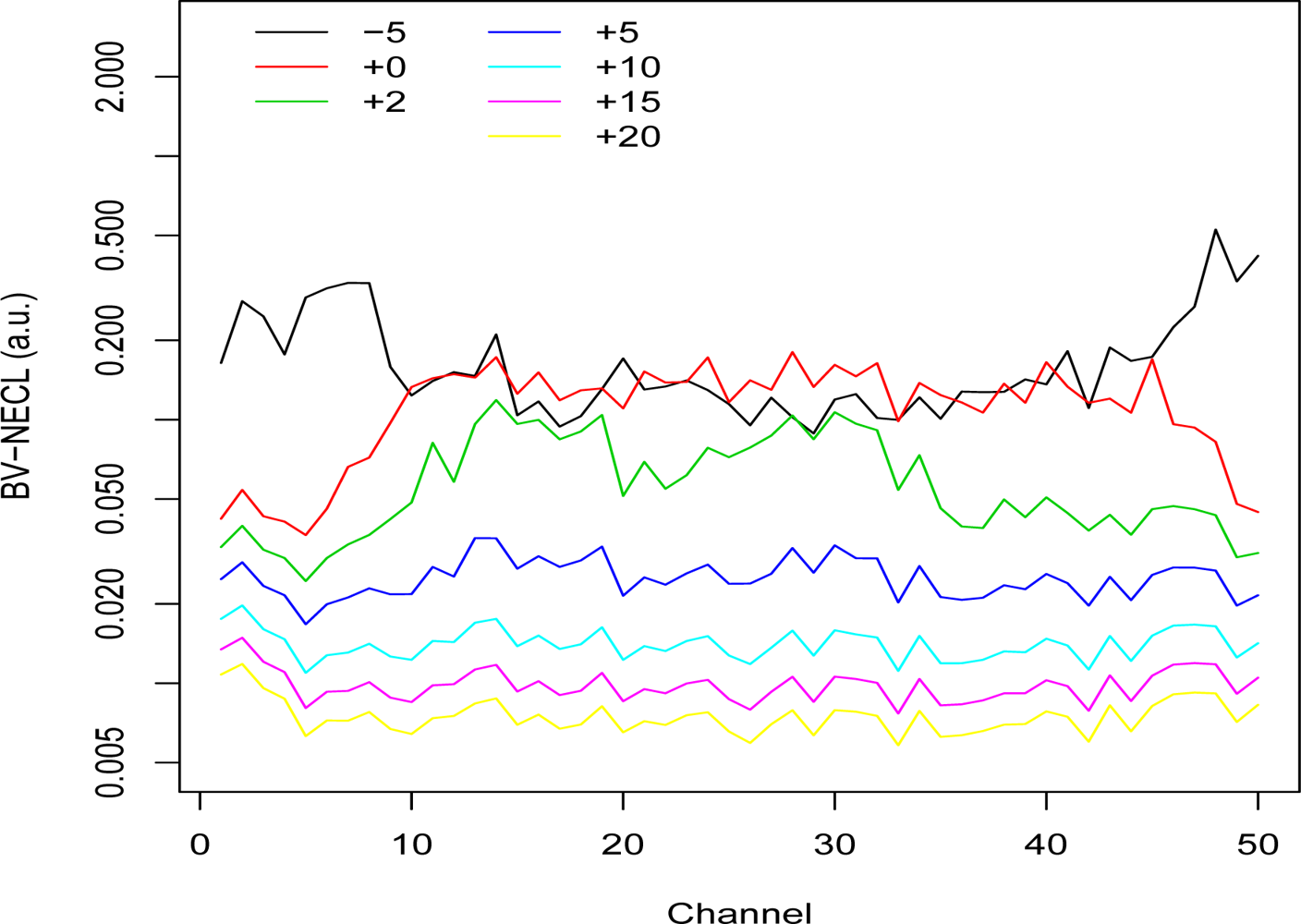
Figures 3,
4, and
5 show plots of the BV-NECL values for three of the pixel groups. Groups 1 and 11 were chosen because their temperature-emissivity contrasts were most different from the others and Group 3 was chosen to represent the other groups. Two general phenomena are demonstrated with these plots. First, as the temperature contrast between the ground and plume increases, the BV-NECL values decrease and become more similar across the spectral range of the data [
2]. This is an interesting outcome when plume temperature exceeds ground temperature because, as one can see in
Figure 3, changes in detectability are much larger in the harder to detect region of channels 30 through 50 than in channels 10 to 20. The implication is that the detectability of a plume in an image will be at least partly controlled by its extent and the cooling or heating it undergoes to equilibriate to ambient atmospheric temperature. A gas with spectral activity in channels 10 to 20 is likely to be easier to detect than a gas with spectral activity in channels 30 to 50.
The second interesting feature of these plots is the comparison of the −5 °K, 0 °K, and +5 °K temperature lines. The results were produced using the 1976 standard atmosphere, so the differences result from the ground emissivities for each group. Walsh
et al. [
9] present an analysis of how temperature contrast and emissivity influence detection. One can see that the channels where the differences between −5 °K and 0 °K BV-NECL values are large in
Figures 3 and
5 correspond to the channels where the endmembers (1 and 11) in
Figure 2 have higher temperature-emissivity contrasts. The flat temperature-emissivity contrast of endmember 3 corresponds to the flat BV-NECL values in
Figure 4. The implication to mission planning is that data collection might be managed for complex scenes with multiple backgrounds to detect potential plumes over those segments of the scene most conducive to their detection.
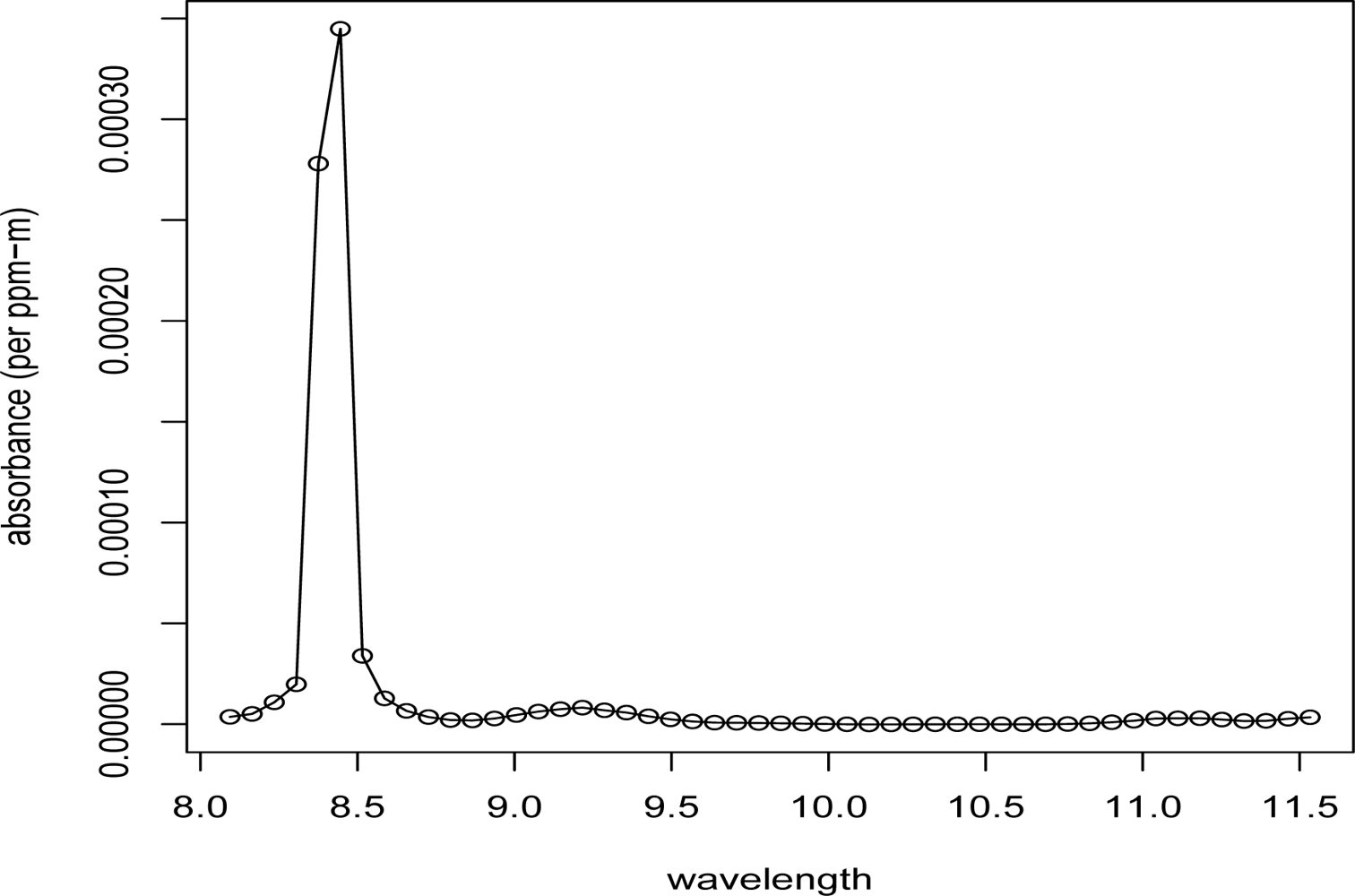
The BV-NECL values can be used to make inference about the detection capability of single-peak gases. The appropriate BV-NECL values can be scaled by dividing by the maximum absorbance of the gas to estimate its NECL values. For example, consider Dibromoethane (Gas 7) from the AHI chemical library shown in
Figure 6. For this gas, we are concerned with the BV-NECL values for the 6th channel where the maximum absorbance is 0.000345 (
ppm-m)
−1. We can compare the scaled 6th channel BV-NECL values to the actual empirical NECL values computed for Gas 7 across the 11 groups (see
Table 2 for comparisons using a +5 °K temperature plume). We set a detection critical value for a 1% probability of false alarm (
Pfa) at 2.326 ×BV-NECL/0.000345. We also estimate the minimum detectable level that gives 95% probability of detection (
Pd) at that 1%
Pfa as (2.326 + 1.645) × BV-NECL/0.000345 = 3.971 × BV-NECL/0.000345. Here 2.326 and 1.645 are z-scores of the Gaussian distribution corresponding to tail probabilities of 0.01 and 0.05.
Table 2 gives the estimated MDCL for a +5°K plume temperature across the 11 groups in the AHI image. The table also provides the empirical
Pfa and
Pd values for critical values set using the BV-NECL values. All of the empirical
Pfa values are higher than the nominal 1%
Pfa. The empirical
Pd values, assuming a gas concentration-pathlength at the BV-NECL-based estimated MDCLs, are only slightly lower than the nominal 95%. The differences between the nomimal and empirical
Pd and
Pfa values are due to differences in the tails of the within-pixel group whitened matched filter distributions compared to the Gaussian distribution. In this case, the tails of the empirical distribution are heavier than the Gaussian distribution. Using the Gaussian to make inference about quantiles for small probabilities (less than about 2%) are inaccurate. The heavier tails are probably due to mixed pixels.
The estimated MDCLs range from 218 to 540 ppm-m with three values below 280, three values between 320 and 400, three values between 400 and 500, and two values over 500. The range and distribution of these results indicate that segmenting the scene reveals important differences in detectability over the various backgrounds that warrant consideration in planning a data collection.
This study used a gas with a single dominant spectral peak and whitened matched filtering to produce the empirical detection estimates. The single-peak gas was selected to demonstrate the BV-NECL method because it represents the simplest challenge and any confounding factors thatmight be associated with multi-peak gases are eliminated. If the method failed to provide useful results with this gas, then any promising results with multi-peak gases would very likely be arbitrary. Initial efforts to apply the BV-NECL technique to multi-peak gases indicate that extending the method to these gases will require further development. Additionally, we used whitened matched filtering because it is a common technique for gas detection in hyperspectral images. How the BV-NECL technique performs with other estimators has not been investigated.
4. Conclusions
We presented a method for predicting the detectability of thin gaseous plumes in hyperspectral images. The novelty of this method is that using basis vectors for each of the spectral channels of a collection instrument to calculate NECL values instead of library gases provides insight into regions of the spectrum where gas detection will be relatively easier or harder, as influenced by ground emissivity, temperature contrast, and atmosphere. We also relate the three-layer physics-based radiance model to NECL values, to SNRs, and finally to MDCLs.
We segmented an AHI image and analyzed it with these techniques. Our results indicate that there are meaningful differences across the MDCLs calculated for the scene segments with a factor of 2.5 between the highest and lowest MDCLs (540 ppm-m versus 218 ppm-m). The implication is that data collection planning could be influenced by information about when potential plumes are likely to be over background segments that are most conducive to detection. Our results also show that these considerations are most important with small temperature contrasts between the ground and plume. As the difference in temperature increases, the BV-NECL values get smaller, indicating that gases are easier to detect, and channel-to-channel differences across BV-NECL values decrease.
The example we present is for a single-peak gas. Our results across the 11 scene segments for this gas and for other single-peak gases indicate that we get very good agreement (within a few percent) between the scaled BV-NECL values and empirical NECL values estimated by mean-centering and whitened match filtering each of the scene segments with the basis vectors. Estimating scaled NECL values and MDCLs for multi-peak gases is a challenging problem and an area for additional research.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}