A Signal Normalization Technique for Illumination-Based Synchronization of 1,000-fps Real-Time Vision Sensors in Dynamic Scenes

Abstract
:1. Introduction
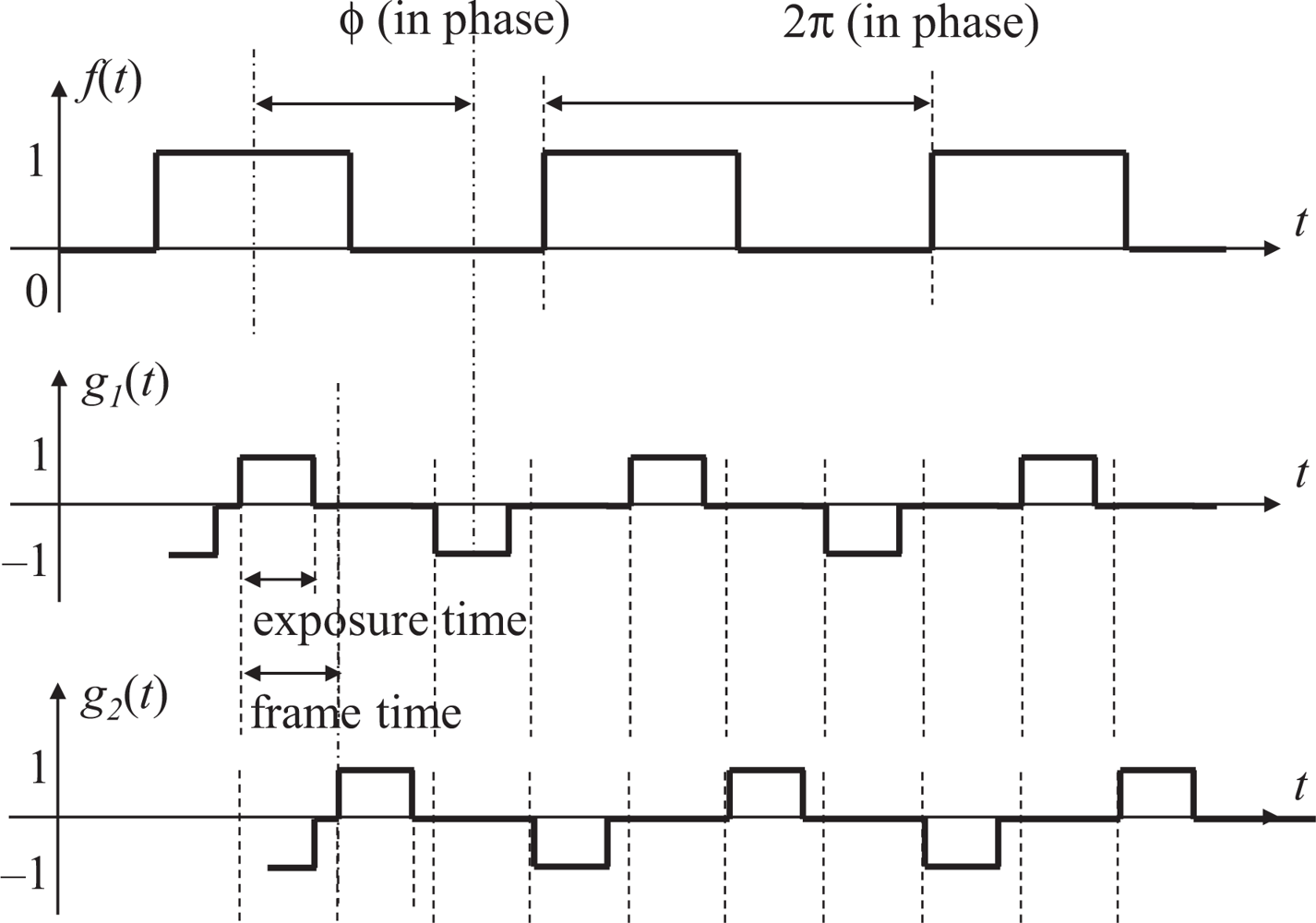
2. Synchronization Algorithm
3. Normalization of the Reference Amplitude
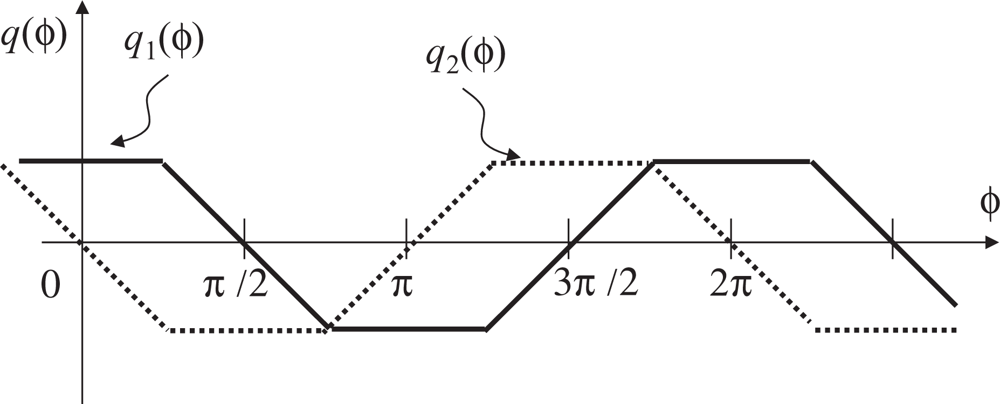
3.1. Signal Normalization by Quadrature Detection
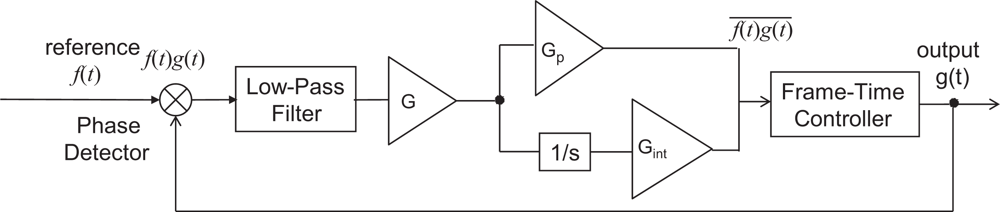
3.2. Feedback Algorithm
3.3. Effect of Background Light
4. Simulation Results and Performance Evaluation
4.1. Sinusoidal Envelope
4.2. Real-World Scene
5. Experiments
5.1. Experimental Setup
5.2. Experimental Results
6. Discussion
7. Conclusions
References
- Fujiyoshi, H; Shimizu, S; Nishi, T. Fast 3D Position Measurement with Two Unsynchronized Cameras. Proceedings of 2003 IEEE International Symposium on Computational Intelligence in Robotics and Automation, Kobe, Japan, 16–20 July 2003; pp. 1239–1244.
- Dragonfly Camera Synchronization; Point Grey Research Inc.: Richmond, Canada. Available online: http://www.ptgrey.com/products/multisync/index.asp (accessed on 16 February 2009).
- Rai, PK; Tiwari, K; Guha, P; Mukerjee, A. A Cost-effective Multiple Camera Vision System using FireWire Cameras and Software Synchronization. Proceedings of the 10th International Conference on High Performance Computing, Hyderabad, India, 17–20 December, 2003.
- Litos, G; Zabulis, X; Triantafyllidis, G. Synchronous Image Acquisition Based on Network Synchronization. In CVPRW ’06: Proceedings of the 2006 Conference on Computer Vision and Pattern Recognition Workshop; IEEE Computer Society: Washington, DC, USA, 2006; pp. 167–167. [Google Scholar]
- Sivrikaya, F; Yener, B. Time Synchronization in Sensor Networks: A Survey. IEEE Netw 2004, 18, 45–55. [Google Scholar]
- Elson, J; Girod, L; Estrin, D. Fine-Grained Network Time Synchronization Using Reference Broadcasts. In Proceedings of the 5th Symposium on Operating Systems Design and Implementation; ACM: New York, NY, USA, 2002; pp. 147–163. [Google Scholar]
- Ganeriwal, S; Kumar, R; Srivastava, MB. Timing-sync Protocol for Sensor Networks. In SenSys ’03: Proceedings of the 1st International Conference on Embedded Networked Sensor Systems; ACM: New York, NY, USA, 2003; pp. 138–149. [Google Scholar]
- Maróti, M; Kusy, B; Simon, G; Lédeczi, A. The Flooding Time Synchronization Protocol. In SenSys ’04: Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems; ACM: New York, NY, USA, 2004; pp. 39–49. [Google Scholar]
- Hou, L; Kagami, S; Hashimoto, K. Illumination-based Synchronization of High-Speed Vision Sensors. Sensors 2010, 10, 5530–5547. [Google Scholar]
- Best, RE. Phase-Locked Loops: Design, Simulation, and Applications; McGraw-Hill Professional: New York, NY, USA, 2007. [Google Scholar]
- Gardner, FM. Phaselock Techniques, 3rd ed; Wiley-Interscience: Malden, MA, USA, 2005. [Google Scholar]
- Meade, ML. Advances in Lock-in Amplifiers. J. Phys.-E-Sci. Instrum 1982, 15, 395–403. [Google Scholar]
- Hou, L; Kagami, S; Hashimoto, K. Performance Evaluation of Illumination-Based Synchronization of High-Speed Vision Sensors in Dynamic Scenes. In International Conference on Advanced Mechatronics 2010; IEEE Computer Society: Osaka, Japan, 2010. [Google Scholar]
- Hou, L; Kagami, S; Hashimoto, K. An Advanced Algorithm for Illumination-Based Synchronization of High-Speed Vision Sensors in Dynamic Scenes. Lect. Note. Artif. Intell 2010, 6425, 378–389. [Google Scholar]
- Ando, S; Kimachi, A. Correlation Image Sensor: Two-Dimensional Matched Detection of Amplitude-Modulated Light. IEEE Trans. Electron. Devices 2003, 50, 2059–2066. [Google Scholar]
- Ohta, J; Yamamoto, K; Hirai, T; Kagawa, K; Nunoshita, M; Yamada, M; Yamasaki, Y; Sugishita, S; Watanabe, K. An Image Sensor With an In-Pixel Demodulation Function for Detecting the Intensity of a Modulated Light Signal. IEEE Trans. Electron. Devices 2003, 50, 166–172. [Google Scholar]
- Iwashita, A; Komuro, T; Ishikawa, M. An Image-Moment Sensor with Variable-Length Pipeline Structure. IEICE Trans. Electron 2007, 90, 1876–1883. [Google Scholar]
- Komuro, T; Iwashita, A; Ishikawa, M. A QVGA-size Pixel-parallel Image Processor for 1,000-fps Vision. IEEE Micro 2009, 29, 58–67. [Google Scholar]
- Kagami, S; Komuro, T; Ishikawa, M. A High-Speed Vision System with In-Pixel Programmable ADCs and PEs for Real-Time Visual Sensing. Proceedings of 8th IEEE International Workshop on Advanced Motion Control, Kawasaki, Japan, 25–28 March 2004; pp. 439–443.
- Komine, T; Nakagawa, M. Performance Evaluation of visible-Light Wireless Communication System Using White LED Lightings. Comput. Commun., IEEE Symp 2004, 1, 258–263. [Google Scholar]
- Tanaka, Y; Komine, T; Haruyama, S; Nakagawa, M. Indoor Visible Light Data Transmission System Utilizing White LED Lights. IEICE Trans. Commun 2003, 86, 2440–2454. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optical Source | LED Illuminance | Effective Distance | Jitters | State | |
|---|---|---|---|---|---|
| 1 | direct illumination | 3460 lx | N/A | N/A | unlocked |
| 2 | direct illumination | 3460 lx | 1.0 m | 24 | locked |
| 3 | moving reflective gadget | 340 lx | 1.0 m | 28 | locked |
| 4 | indirect illumination | 1068 lx | 0.8 m | 28 | locked |
| 5 | direct illumination | 142 lx | 1.0 m | 28 | locked |
| 6 | direct illumination | 3850 lx | 1.5 m | 28 | locked |
© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Hou, L.; Kagami, S.; Hashimoto, K. A Signal Normalization Technique for Illumination-Based Synchronization of 1,000-fps Real-Time Vision Sensors in Dynamic Scenes. Sensors 2010, 10, 8719-8739. https://doi.org/10.3390/s100908719
Hou L, Kagami S, Hashimoto K. A Signal Normalization Technique for Illumination-Based Synchronization of 1,000-fps Real-Time Vision Sensors in Dynamic Scenes. Sensors. 2010; 10(9):8719-8739. https://doi.org/10.3390/s100908719
Chicago/Turabian StyleHou, Lei, Shingo Kagami, and Koichi Hashimoto. 2010. "A Signal Normalization Technique for Illumination-Based Synchronization of 1,000-fps Real-Time Vision Sensors in Dynamic Scenes" Sensors 10, no. 9: 8719-8739. https://doi.org/10.3390/s100908719