Mass Transport Effects in Suspended Waveguide Biosensors Integrated in Microfluidic Channels

Abstract
: Label-free optical biosensors based on integrated photonic devices have demonstrated sensitive and selective detection of biological analytes. Integrating these sensor platforms into microfluidic devices reduces the required sample volume and enables rapid delivery of sample to the sensor surface, thereby improving response times. Conventionally, these devices are embedded in or adjacent to the substrate; therefore, the effective sensing area lies within the slow-flow region at the floor of the channel, reducing the efficiency of sample delivery. Recently, a suspended waveguide sensor was developed in which the device is elevated off of the substrate and the sensing region does not rest on the substrate. This geometry places the sensing region in the middle of the parabolic velocity profile, reduces the distance that a particle must travel by diffusion to be detected, and allows binding to both surfaces of the sensor. We use a finite element model to simulate advection, diffusion, and specific binding of interleukin 6, a signaling protein, to this waveguide-based biosensor at a range of elevations within a microfluidic channel. We compare the transient performance of these suspended waveguide sensors with that of traditional planar devices, studying both the detection threshold response time and the time to reach equilibrium. We also develop a theoretical framework for predicting the behavior of these suspended sensors. These simulation and theoretical results provide a roadmap for improving sensor performance and minimizing the amount of sample required to make measurements.
1. Introduction
Label-free optical biosensors based on integrated photonic devices are able to accurately detect chemical and biological molecules over a wide concentration range in real-time [1–4]. Therefore, these devices have a broad range of applications, spanning from defense to the pharmaceutical industries. For example, they have been used to determine the kinetic constants (binding coefficients) of many receptor:ligand pairs [5] and in the development of sensors for monitoring environmental biohazards [1,6].
The performance of an integrated label-free biosensor is typically characterized according to its sensitivity or limit of detection for a given analyte of interest, with researchers continuously pushing the boundaries on sensitivity. In parallel, moderate consideration is usually given for specificity through the development of surface chemistries for targeting the analyte of interest. However, minimal effort is expended on optimizing the collection efficiency of the sensor. By increasing the collection efficiency, it is possible to significantly reduce the amount of sample required for a measurement and compensate for a lower sensitivity device. Minimizing sample consumption is critical for analytical applications, particularly those involving rare or valuable materials. As such, any improvements to the collection efficiency can reduce the cost and increase the ease of conducting experiments that allow for further optimization of sensitivity and specificity. Therefore, because of the balance between sensitivity and collection efficiency, the optimization of collection efficiency and the device sensitivity should occur in parallel.
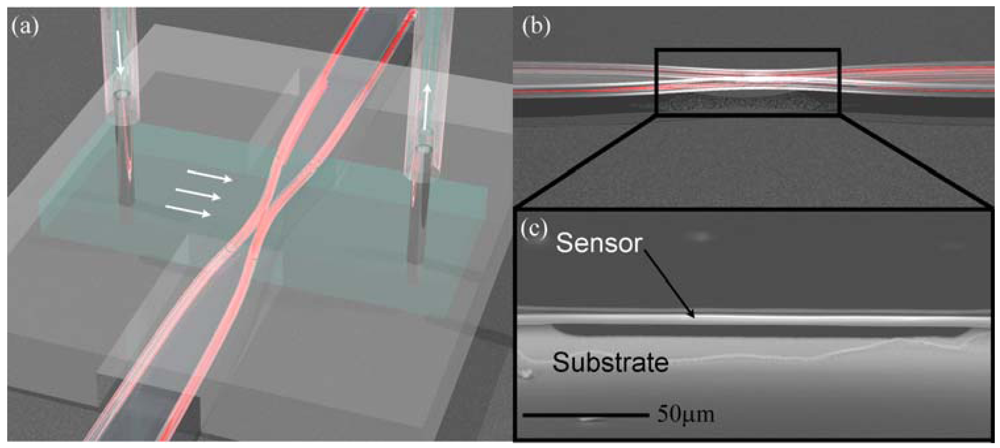
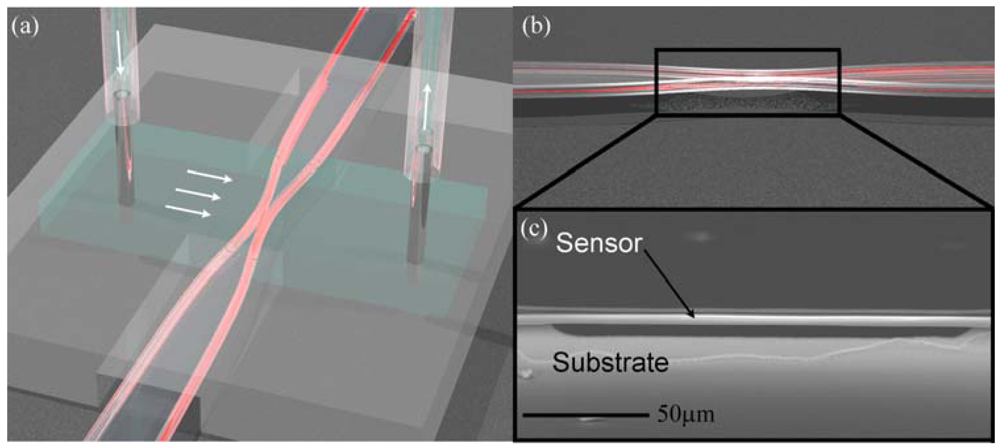
In the present work, we explore how the vertical placement of a suspended optical device within a microfluidic channel can influence its collection efficiency through a series of finite element method simulations. This work is focused on integrated waveguide biosensors, which have demonstrated the ability to detect bacteria, cells and proteins in complex environments [7–10]. As a result of the fabrication design, all of these waveguides were located directly on the substrate. Recently, a new type of waveguide sensor was developed that is elevated off of the substrate (Figure 1), offering the possibility of improved sample delivery [11,12]. Previous research on electrical nanowire sensors has demonstrated improved collection efficiency using this approach [13]. By considering fluid flow and monitoring the surface concentration of bound analyte over a range of system parameters, we are able to compare the sample delivery efficiency of this new suspended sensor to that of more established waveguide sensor geometries. We also develop a general theoretical framework for analyzing the response characteristics of suspended waveguide biosensors.
2. Details of the Model
In order to accurately determine the collection efficiency of the suspended waveguide device, it is necessary to account for both the fluid flow around the sensor and the reaction kinetics at the surface of the sensor. This type of complex, interdependent modeling is ideally suited for COMSOL Multiphysics, a finite element simulation package, which can incorporate multiple physical phenomena interactively.
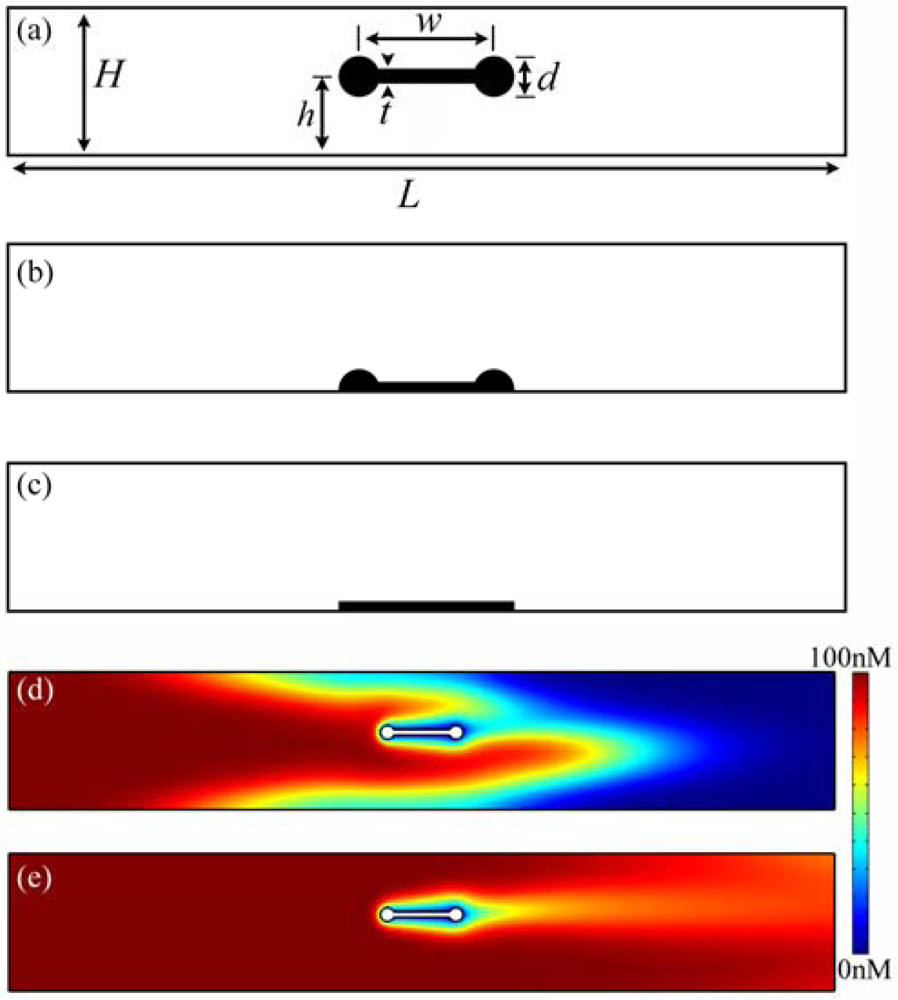
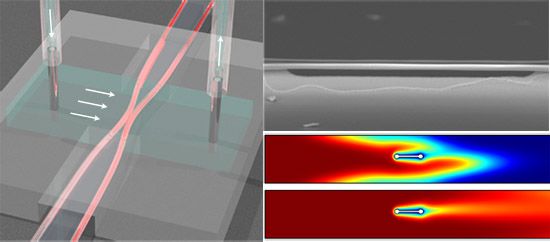
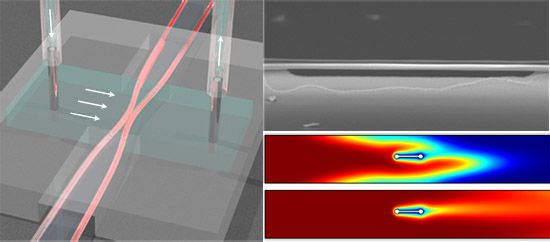
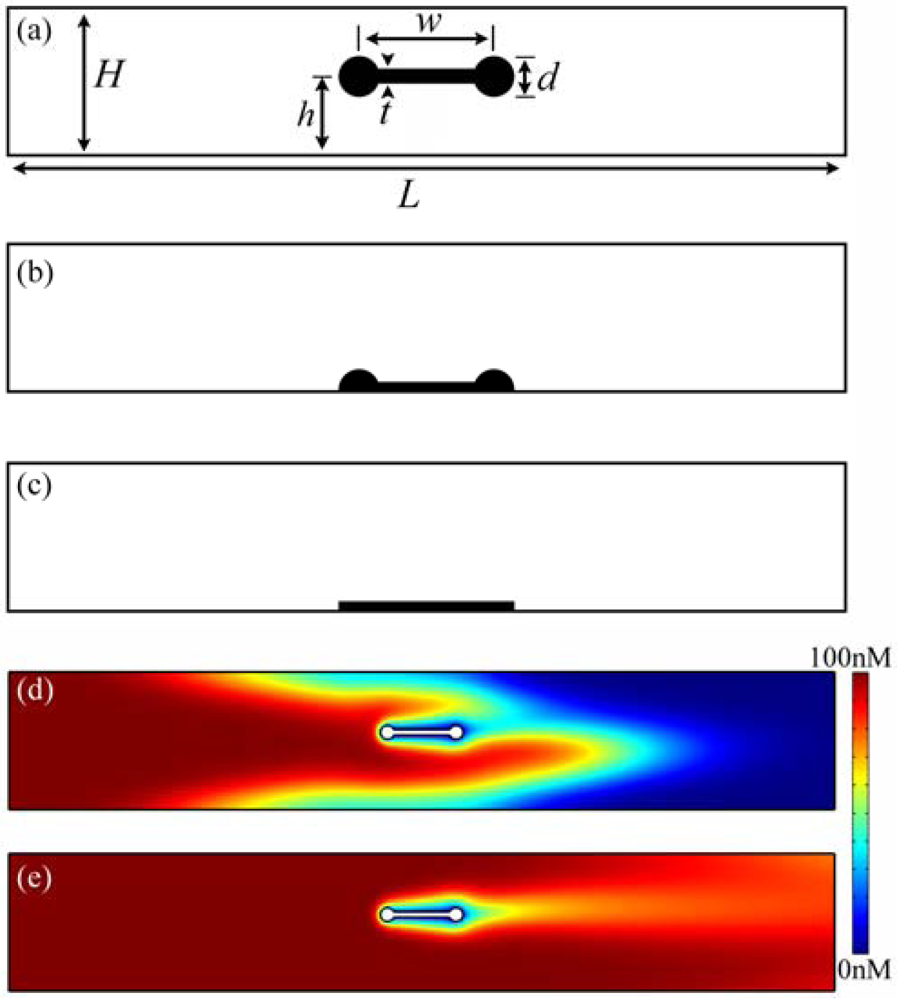
Specifically, finite element method simulations were performed using COMSOL Multiphysics 4.2 to solve the Navier-Stokes (i.e., momentum balance and continuity equations) and conservation of mass equations in a geometry representing a microfluidic flow cell containing a suspended optical waveguide sensor oriented transverse to the flow (Figure 2(a)). All dimensions were based on experimentally realistic conditions or previously determined values. For example, to accurately determine the dimensions of the optical waveguide, we used the results from previous work which first demonstrated this suspended waveguide device [12]. Similarly, the total height H of the channel was varied between 25 and 100 μm to reflect typical polydimethylsiloxane (PDMS) microfluidic device dimensions [14,15].
In order to compare sample delivery efficiencies of substrate-bound and suspended sensors, we varied the vertical position h of the suspended sensor within the channel (Figure 2(a)). This height is determined by the combination of isotropic and anisotropic etchants which are used in the device fabrication process; therefore, there is extremely good control (sub-μm) over this parameter. The precise range of attainable values of h has yet to be determined for this young technology, but values in excess of 50 μm are routinely achieved. The elevation values we consider here fall within the experimentally demonstrated range of values of h, and also include the limiting value of zero elevation (Figure 2(b)). We also modeled a simple rectangular sensor that is embedded in the channel floor (Figure 2(c)). This geometry is similar to that of slab waveguide sensors and surface plasmon resonance (SPR) sensors. The flat SPR sensor, first commercialized by Biacore, is a benchmark for comparison, and also serves to verify our results with past studies [16–19].
A finite element mesh was generated to focus computation power on regions of the flow cell where the dependent variables were most influenced by position. The model was tested over a range of mesh element sizes to check for convergence and to ensure that the model had sufficient spatial resolution to capture relevant phenomena. The accuracy of our model was determined based on its ability to reproduce analytical results for simple cases. Additional details of how the computational model was built and validated, along with specifics of convergence tests and details of the finite element mesh used are included in the online supplementary information.
Several assumptions were made in order to simplify the process of solving for the fluid velocity and analyte concentration profiles in the system. First, the 3-D geometry was reduced to the 2-D cross section along the length of the channel shown in Figure 2. This is an acceptable approximation when the effective sensing area of the waveguide is situated in the middle of the channel and away from the sidewalls, as it is for the devices of interest, or when the channel width is very large relative to the channel height [20]. The simulated channel extends six sensor widths upstream and six widths downstream from the sensor in the direction of fluid flow, for a total length of 300 μm. Additionally, we consider only binding of the analyte to the functionalized sensor and ignore any non-specific adsorption to the sensor or channel walls. This simplification is supported by recent advances in surface functionalization chemistry for gold and silica surfaces that significantly reduce the amount of non-specific binding [21–23]. We further assume incompressible, laminar flow that enters the channel with a fully developed parabolic velocity profile. Since this inlet flow profile is symmetric about the mid-height of the channel, it is only necessary to consider sensor elevations ranging from mid-channel to the flow cell floor.
It is important to note that the parabolic flow profile is characteristic of a pressure-driven flow, which is the conventional method used for PDMS microfluidic channels [24–26]. An alternative method is electrokinetic-driven flow. The flow profile for electrokinetic flow is inverted, with the high flow velocity on the boundaries and slower flow in the middle of the channel [27]. However, electrokinetic flow requires a fluid that contains charged molecules. As a result, when comparing the maximum achievable flow rates and utility of the two methods, it is widely acknowledged that pressure driven flow is able to achieve higher flow rates and is applicable to a broader range of biological fluids [28,29]. Therefore, we have focused our efforts on pressure-driven flow.
The adsorption of analyte to the sensor surface is approximated as (first-order) Langmuir binding [30] according to the following reaction between a freely diffusing protein A with concentration [A] and an unoccupied binding site B with surface concentration [B] forming a bound complex Cs with surface concentration [Cs]:
Mass action kinetics allow us to express the rates of the forward and reverse reactions in terms of the forward and reverse kinetic rate constants kf and kr, respectively, as:
Interleukin 6 and anti-IL6.8 were chosen as the representative analyte and receptor, respectively. For this system, we used the parameters listed in Table 1, varying certain parameters for different studies. Interleukin 6 was chosen because it is involved with a range of important biologic functions. For example, it plays a key role in the immune and neural systems, in hematopoiesis, and in acute phase response, where it is a sensitive physiological marker of systemic inflammation [31,32]. Representative concentration profiles are shown in Figure 2(d,e).
It is important to note that in optical devices, additional phenomena are present which can enhance the collection of particles by the sensor surface, including photophoresis and thermophoresis [33–35]. The presence of these forces has been observed with micron-sized nanoparticles. However, the present work is studying IL-6, which is a nano-scale biological particle with minimal charge. Therefore, based on the fundamental governing equations for the forces, the effect would be negligible [36–38].
We investigated two critical measures of sensor response time to characterize the collection efficiency: (1) equilibration time and (2) time of detection. For the present work, the equilibration time teq was defined as the length of time required for the surface concentration of bound complex to reach 95% of its equilibrium value. This arbitrary but convenient percentage was chosen to minimize the error in identifying this threshold time that can arise as the surface concentration asymptotically approaches its equilibrium value, while still giving a realistic approximation of how long the device takes to equilibrate. The limit of detection [Cs]min, and corresponding detection time td, represent the lowest concentration of surface-bound analyte that can be detected, and the length of time taken to achieve this value, respectively. In our studies, [Cs]min was set at 10 pg/mm2 (equivalently 3.85 × 10−10 mol/m2, based on a representative molecular weight of 26 kDa for IL-6), which corresponds to approximately 2.5% coverage of the suspended sensor surface. This conservative value was selected based on the current experimental results using waveguide biosensors [7–10]. Both of these metrics are commonly used in characterizing the performance of biosensors and other types of chemical detectors [2].
In characterizing the sensor response, we also accounted for the time delay that may occur as analyte is carried from the flow cell inlet to the sensor via advection. For example, at v̅in = 10−4 m/s, it would take ∼1 s for the antigen molecules introduced at the flow-cell entrance at time zero to travel 150 μm downstream to the waveguide and begin binding. We defined the start of binding as the time t1 when the average surface concentration is equivalent to a single molecule of bound analyte per micrometer of sensor length (for details, see Section 3.1 of the supplementary information).
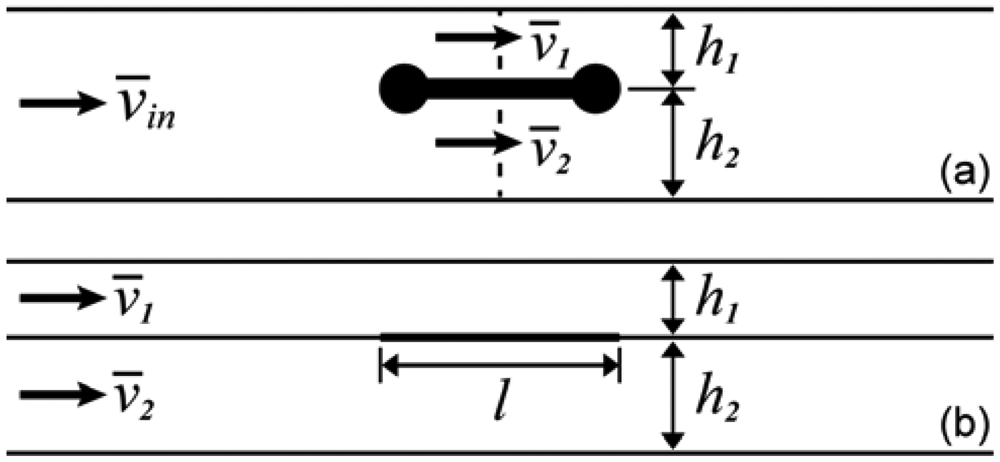
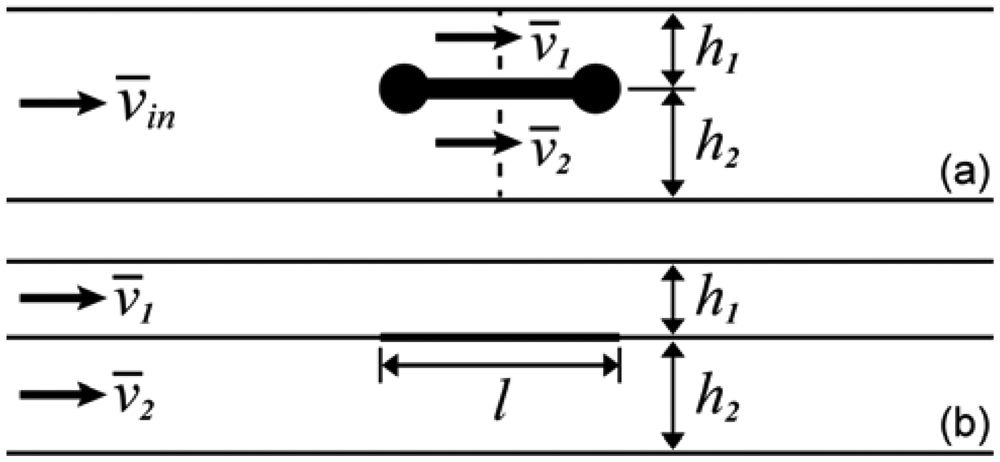
The problem of convection, diffusion and reaction to traditional surface-bound flat planar sensors has been studied extensively, both via simulation and experiment [44,45], and powerful theoretical methods exist to characterize the regimes of operation of such devices based on the values of a few key dimensionless numbers, and thereby approximate their binding behavior over a vast range of operational parameters [20]. Our general approach to analyzing suspended biosensor behavior in microfluidic channels builds upon this knowledge and intuition by treating the upper and lower surfaces of the suspended sensor as individual flat planar sensors located in an analogous two-channel system (Figure 3(a,b)). This analytical approach complements our simulation results in providing insights into the probable behavior of the new sensor geometry.
3. Results and Discussion
3.1. Velocity and Height Dependent Fluid Flow Simulations
We begin by discussing flow around the suspended sensor. Consider the average velocity of fluid in the regions directly above and below the sensor (v̅1 and v̅2 respectively). In general, v̅1 and v̅2 depend on the size of the gaps h1 and h2, on the geometry of the sensor, and on the Reynolds number of the incoming flow:
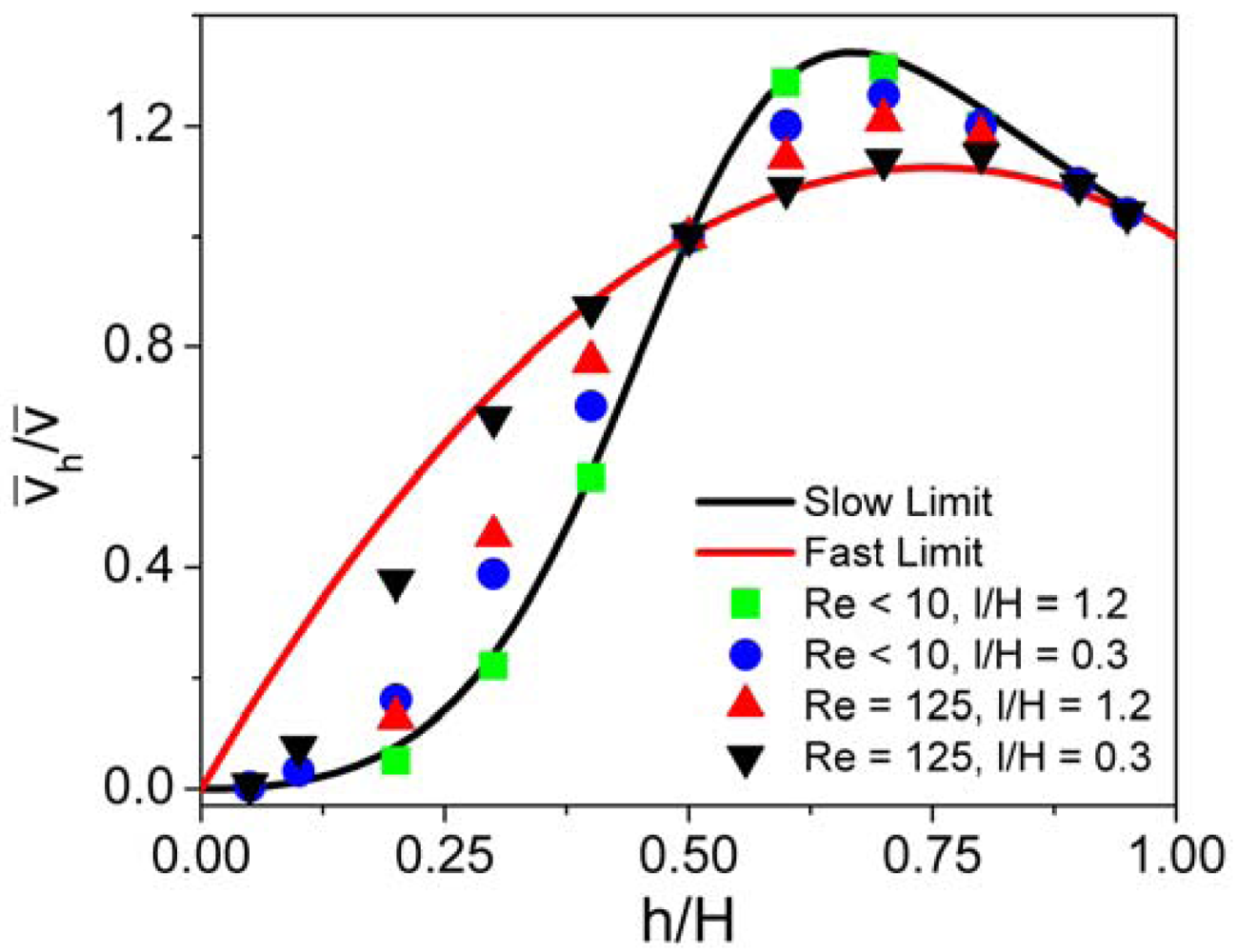
For a derivation of Equations (5) and (6), see the Supplementary Information, Section 4. Figure 4 compares the results obtained in our FEM simulations with those estimated using Equations (5) and (6). In general, the equations provide better relative estimates of the flow velocity as h/H increases. For ReH below ∼10 and l/H > 0.5, the flow velocity on either side of the sensor is approximated well by Equation (5). Conversely, for ReH greater than ∼100 and l/H < 1, Equation (6) is reasonably accurate, except at very small values of h/H. As expected, the slow limit approximation improves with increasing l/H, and the fast limit approximation with decreasing l/H.
3.2. Incorporation of Mass Transport and Surface Reaction into Fluid Flow Simulations
Next we consider mass transport. The dimensionless flux (Sherwood number) is a useful generalized metric of the rate at which mass transport can deliver analyte molecules to the sensor surface [46]:
This number compares the time needed for a particle to diffuse across a channel of height h with the time needed to convect past a sensor of length l at average flow velocity, v̅h. When Pec < 1, convection is slow enough that all analyte molecules flowing past the sensor have enough time to diffuse to the surface. On the other hand, when Pec » 1, only analyte molecules in a narrow region near the sensor surface have a chance of being collected as they are swept by.
In contrast to the embedded sensor, whose operation is characterized by a single Pec value, separate Pec values characterize mass transport to the top and bottom surfaces of the suspended sensor. Thus, three distinct mass transport regimes are possible. When Pec » 1 on both sides of the sensor, we observe the development of a concentration boundary layer (visible in Figure 2(e)), where the concentration gradient established at the sensor surface due to specific binding exists only over a region of thickness δ ∼ l Pes−1/3. Here:
Conversely, when Pec < 1 on both sides of the sensor, all analyte molecules are collected, and the flux on either side is simply:
Finally, we have the more complex scenario where Pec,1 < 1 and Pec,2 » 1. Here, a concentration boundary layer forms below the sensor, and the flux to this side is given by Equation (10). Meanwhile, all target molecules that enter the region above the sensor are collected. However, this scenario requires that the flow rate above the sensor be orders of magnitude smaller than the flow rate below it. Thus, the bulk flow deviates around the gap and target molecules are primarily pulled into the region above the sensor by diffusion. Consequently, the flux to the upper surface of the sensor is given by
For a given set of model parameters, we can easily calculate the equilibrium concentration, [Cs]eq, by setting Equations (2) and (3) equal to one another and noting that [B] = [B]m – [Cs]:
Given enough time and an adequate supply of analyte, the concentration of analyte bound to the sensor surface will invariably approach this value. A quantitative analysis of convergence to [Cs]eq in our model is included in the online supplementary information. The dissociation equilibrium constant KD = 6.67 × 10−12 M arises as a natural concentration scale. When [A]0/KD » 1, the analyte solution is concentrated enough to essentially saturate the sensor, and [Cs]eq ≈ [B]m. Conversely, when [A]0/KD « 1, only a fraction [Cs]eq/[B]m ≈ [A]0/KD of the available binding sites are bound in equilibrium. Thus, our detection limit estimate of 2.5% sensor surface coverage restricts us to inlet analyte concentrations [A]0 > 0.025 KD or [A]0 > ∼200 fM. However, since this estimate is highly conservative, it is possible that we will be able to detect solutions several orders of magnitude more dilute.
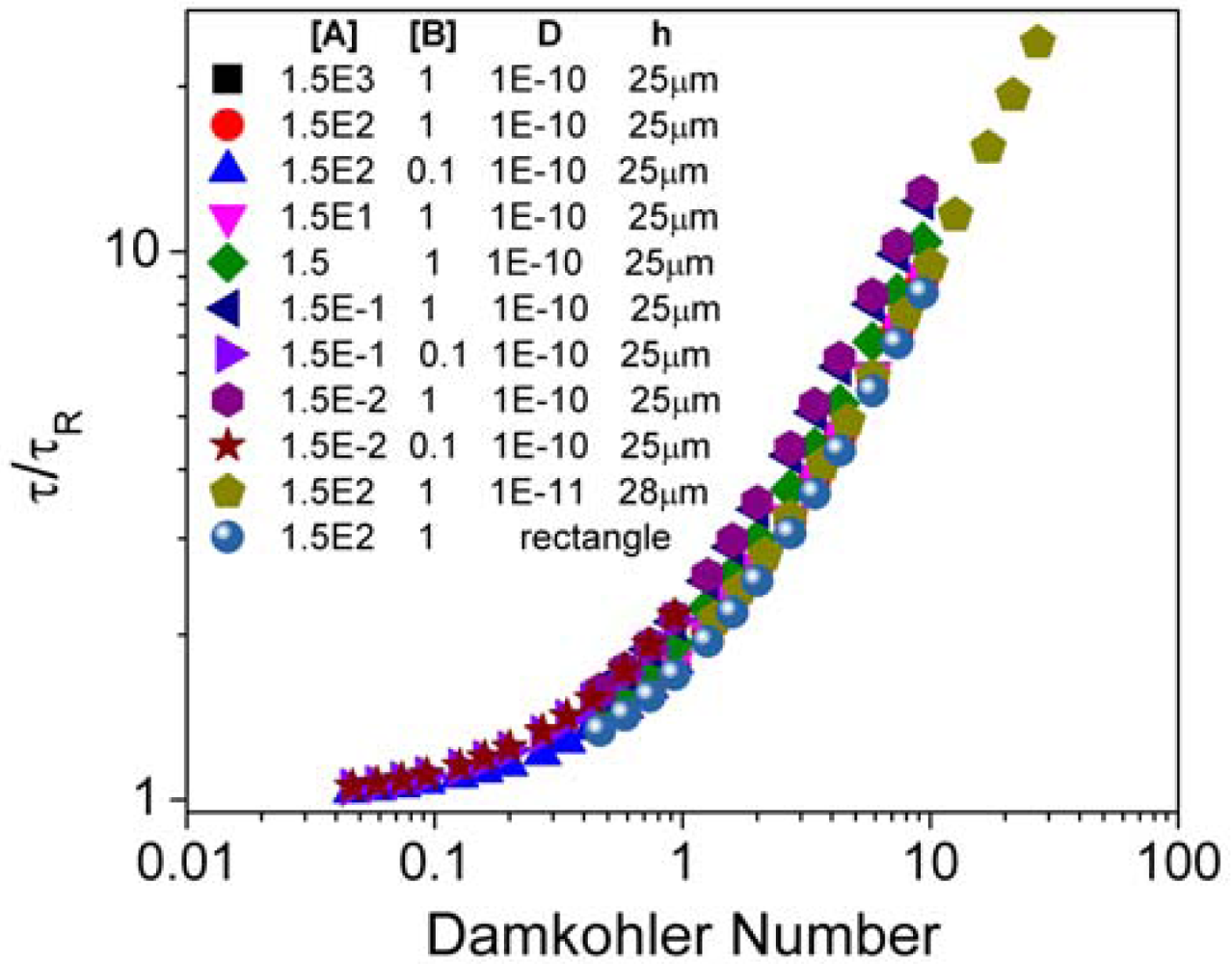
The approach to equilibrium is characterized by the Damköhler number, which is defined as the ratio of reactive flux to diffusive flux at the sensor surface [20]:
Here D is the bulk diffusion coefficient of IL-6 in water. When Da « 1, the reaction itself is rate-limiting and the concentration of surface-bound analyte grows according to:
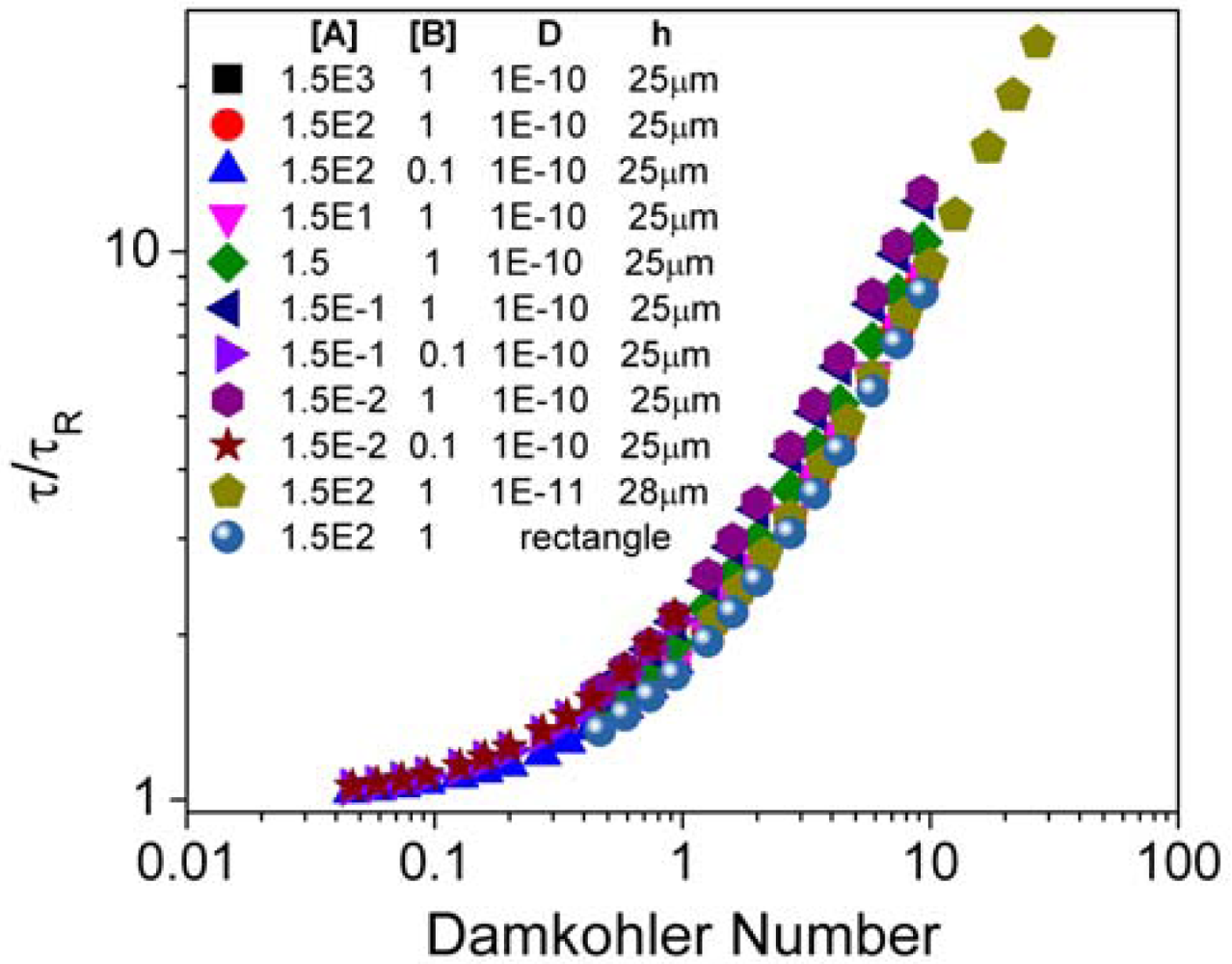
To analyze the binding response of the present sensor, we performed simulations over a range of conditions with the sensor located at the mid-plane of the channel. Representative results are plotted in Figure 5. As is the case for flat planar sensors, a wide range of analyte concentrations, antibody concentrations, and flow velocities collapse onto a single master curve. These results hold as long as the sensor is located near enough the channel mid-height that the top and bottom surfaces equilibrate on similar timescales. To a reasonable approximation, this is the case when the collection Péclet numbers on either side of the sensor are of the same order of magnitude. Equation (8), together with the slow-limit result that the average fluid velocity varies as the square of the channel height, gives us that Pec ∼ h4. Therefore, the binding response of any sensor suspended in a channel such that h1 and h2 differ by a factor of ∼1.8 or less (or equivalently, 0.35 < h/H < 0.65) should be well approximated by the mid-channel results.
The preceding analysis and the master curve of Figure 5 apply throughout most of the parametric domain of Table 1 for sensors near mid-channel. Our simulation results only showed deviations in those regimes where the assumptions underlying our quasi-steady analysis break down; where the time needed for the boundary layer to develop is sufficient to appreciably saturate the sensor. This occurs at the highest inlet analyte concentrations, low flow velocities and low surface antibody concentrations.
3.3. Effect of Sensor Height and Comparison of Sensor Geometries
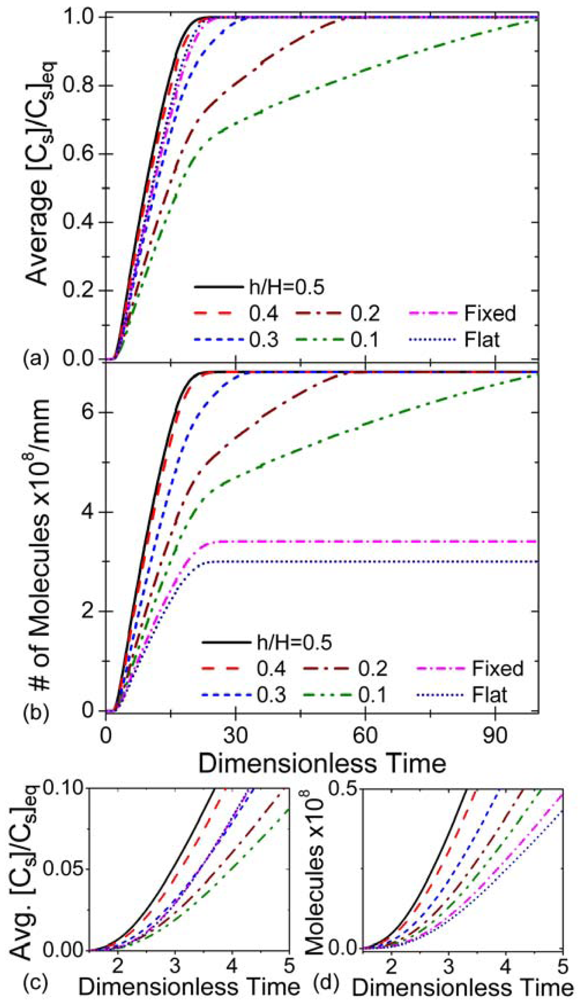
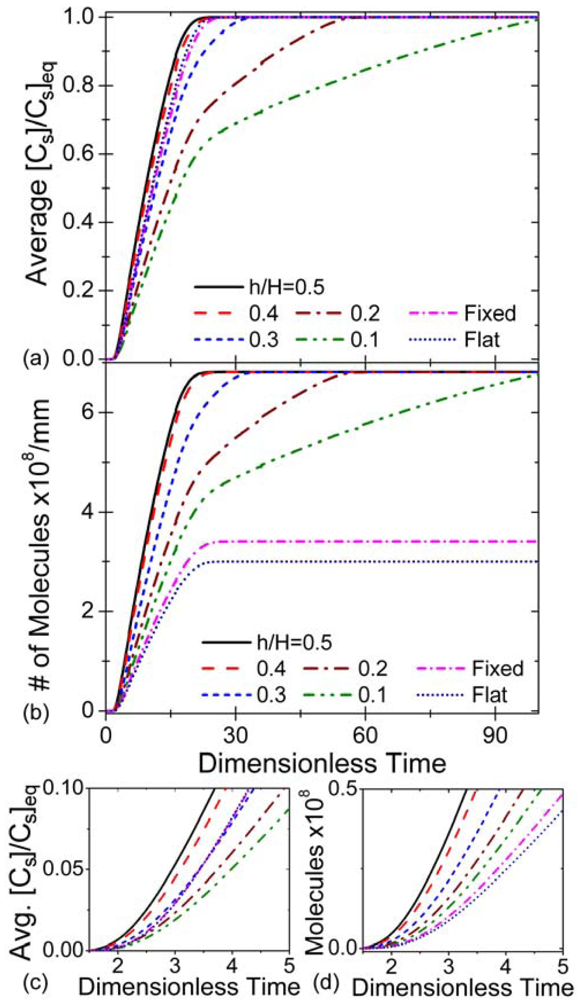
Figure 6 shows binding behavior for various sensor elevations and geometries at a fixed flow velocity. As can be observed, the mid-channel placement reduces binding time amongst the suspended sensors. Additionally, due to the greater than 2-fold increase in sensing surface area, the total mass of IL-6 that can be collected and detected is significantly increased in the suspended geometry, enabling improved collection efficiency and performance (Figure 6(b)). At low flow velocities, advective mass transport to regions beneath the low-elevation sensors becomes insignificant compared to diffusive transport. This is due to the preferential flow of fluid through the much larger gap on the other side of the sensor (as predicted by the analysis in Section 3.2), and leads to the characteristic two-stage binding curves of Figure 6, which feature a regime where advective transport quickly leads to saturation of the antibodies on the top of the sensor surface and another where diffusive transport slowly delivers antigen to the bottom of the device. The upper surfaces all approach equilibrium at approximately the same time (t/τR = 20, in this case), but the lower surfaces equilibrate on progressively slower timescales as elevation is reduced. This indicates that suspended sensors with low elevations would be particularly inefficient for making endpoint measurements.
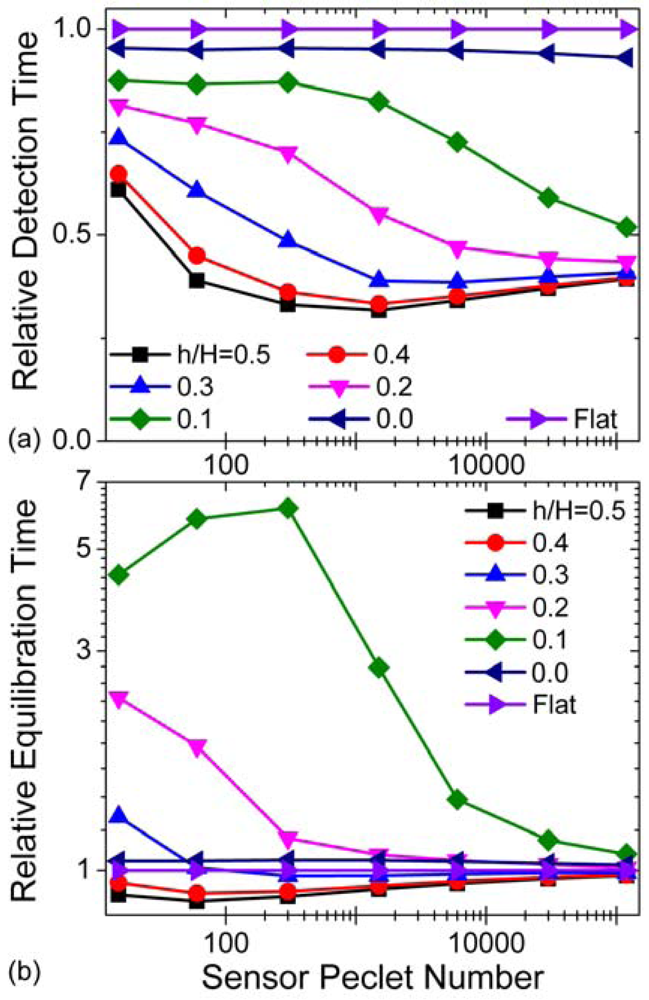
Figure 7 compares response times of these sensors over a range of flow velocities. To accurately compare the different geometries, we first adjust all response times at a given flow velocity by the smallest t1 for any of the sensors considered. This ensures that we maintain an even reference frame for direct comparisons between the different elevations/geometries. Then, we divide all times by the corresponding flat sensor response time, since this geometry serves as our benchmark. Because the suspended sensor is still in the early stages of its development, the noise-limited detection threshold for this device is unknown. In order to facilitate our discussion, we assume a detection threshold of 0.68 pg/mm, which corresponds to 1.6 × 107 bound antigen molecules per millimeter length of sensor, irrespective of geometry. This particular value is equivalent to our earlier specification of [Cs]min for the suspended sensors, but the general trends shown in Figure 7(a) persist over a range of detection threshold values (see Section 3.2 in the online Supplementary Information).
The suspended sensor significantly outperforms the substrate-bound sensor in terms of detection time. At all but the slowest modeled flow velocities, the mid-channel placement offers a greater than twofold reduction in relative detection time over the conventional planar geometry. A long flow cell upstream of the sensor will diminish this performance difference by increasing all absolute detection times concurrently. Quicker response times also imply lower sample consumptions for the suspended sensor, especially when paired with a short flow cell. Figure 7(b), meanwhile, shows that suspended waveguide sensors located near the middle of the flow cell and conventional flat planar sensors with equal surface antibody concentrations equilibrate on very similar timescales. However, over twice as many antigen molecules are bound per unit length to the suspended sensors than the flat one at equilibrium, and thus the suspended sensor is able to utilize a larger fraction of the total antigen molecules in the flow cell and should generate a correspondingly larger signal. In addition, the suspended waveguide device should see further performance increases because a larger proportion of the bound antigen molecules interact with the evanescent field of the confined light [11].
4. Conclusions
We have developed a finite element model that simulates advection, diffusion and specific binding of IL-6 to the antibody-functionalized surface of a novel suspended waveguide biosensor in a microfluidic channel. We use this model to characterize sensor behavior for a range of average flow velocities, inlet antigen concentrations, and surface-immobilized antibody concentrations. Device performance is evaluated according to two common sensor metrics: the detection time and the equilibration time.
Our model predicts that the detection and equilibration times will have a weak dependence on flow velocity, while inlet analyte concentration can greatly impact the kinetic response of the device. Our results further show that reducing the surface antibody concentration can extend the range of conditions over which the sensor is reaction-limited. However, transport-limited conditions may be reached at sufficiently low flow rates, high analyte concentrations and high antibody concentrations on the surface. These conditions can lead to long equilibration times, require significant sample volumes in order to make measurements, and make it difficult to determine kinetic rate constants for the surface binding reaction, making them ill-suited for most biosensor measurements.
We also compare the specific binding to waveguide sensors suspended at varying heights in the channel with that for planar sensors on the channel floor. The sensor suspended at mid-height in the channel shows shorter detection times than the flat device due to its thinner boundary layers and increased active sensing area. Though equilibration times are similar for these two geometries, sensors elevated only slightly above the channel floor yield significantly slower equilibration times than either the planar substrate or the sensor at mid-height of the channel. The small gap between the suspended sensor and the channel floor at small elevations hinders the efficient mass transport via advection to the bottom side of the device. Our results indicate that suspended sensors can display a range of transient behaviors, with efficiencies either greater than or less than those of traditional planar sensors, depending upon their elevation. Given that lithographic methods are used to fabricate these and other semi-conductor based optical sensors, the elevation of the sensor within the channel can be optimized to locate the device within the region of highest sample delivery to ensure the largest possible performance improvements.
These findings, together with the general framework developed in this paper for analyzing and predicting suspended sensor behavior, provide a basis for optimizing the performance of novel suspended waveguide biosensors in microfluidic channels, leading to reduced sample consumption and improved response time of these devices.
Supplementary Material
sensors-12-14327-s001.pdfAcknowledgments
The authors would like to thank Jason Gamba (University of Southern California and Intel) for helpful discussions. This work was supported by the National Science Foundation (1028440), the Office of Naval Research (ONR) Young Investigator Program (N00014-11-1-0910) and the Rose Hills Foundation Science and Engineering Fellowship.
References
- Erickson, D.; Mandal, S.; Yang, A.H.J.; Cordovez, B. Nanobiosensors: Optofluidic, electrical and mechanical approaches to biomolecular detection at the nanoscale. Microfluid. Nanofluid. 2008, 4, 33–52. [Google Scholar]
- Hunt, H.K.; Armani, A.M. Label-free biological and chemical sensors. Nanoscale 2010, 2, 1544–1559. [Google Scholar]
- Washburn, A.L.; Bailey, R.C. Photonics-on-a-chip: Integrated waveguides as enabling detection elements for lab-on-a-chip biosensing applications. Analyst 2011, 136, 227–236. [Google Scholar]
- Fan, X.D.; White, I.M.; Shopova, S.I.; Zhu, H.Y.; Suter, J.D.; Sun, Y.Z. Sensitive optical biosensors for unlabeled targets: A review. Anal. Chim. Acta 2008, 620, 8–26. [Google Scholar]
- Zhu, H.Y.; White, I.M.; Suter, J.D.; Zourob, M.; Fan, X.D. Opto-fluidic micro-ring resonator for sensitive label-free viral detection. Analyst 2008, 133, 356–360. [Google Scholar]
- Zhu, J.G.; Ozdemir, S.K.; Xiao, Y.F.; Li, L.; He, L.N.; Chen, D.R.; Yang, L. On-chip single nanoparticle detection and sizing by mode splitting in an ultrahigh-Q microresonator. Nat. Photon. 2010, 4, 46–49. [Google Scholar]
- Xu, J.; Suarez, D.; Gottfried, D.S. Detection of avian influenza virus using an interferometric biosensor. Anal. Bioanal. Chem. 2007, 389, 1193–1199. [Google Scholar]
- Horvath, R.; Pedersen, H.C.; Skivesen, N.; Selmeczi, D.; Larsen, N.B. Optical waveguide sensor for on-line monitoring of bacteria. Opt. Lett. 2003, 28, 1233–1235. [Google Scholar]
- Martinez, J.S.; Grace, W.K.; Grace, K.M.; Hartman, N.; Swanson, B.I. Pathogen detection using single mode planar optical waveguides. J. Mater. Chem. 2005, 15, 4639–4647. [Google Scholar]
- Rong, G.; Najmaie, A.; Sipe, J.E.; Weiss, S.M. Nanoscale porous silicon waveguide for label-free DNA sensing. Biosens. Bioelectron. 2008, 23, 1572–1576. [Google Scholar]
- Maker, A.J.; Armani, A.M. Low loss silica on silicon waveguides. Opt. Lett. 2011, 36, 3729–3731. [Google Scholar]
- Zhang, X.; Armani, A.M. Suspended bridge-like silica 2 × 2 beam splitter on silicon. Opt. Lett. 2011, 36, 3012–3014. [Google Scholar]
- Kim, D.R.; Zheng, X.L. Numerical characterization and optimization of the microfluidics for nanowire biosensors. Nano Lett. 2008, 8, 3233–3237. [Google Scholar]
- Dangla, R.; Gallaire, F.; Baroud, C.N. Microchannel deformations due to solvent-induced PDMS swelling. Lab Chip 2010, 10, 2972–2978. [Google Scholar]
- Hwang, S.Y.; Kwon, K.W.; Jang, K.J.; Park, M.C.; Lee, J.S.; Suh, K.Y. Adhesion assays of endothelial cells on nanopatterned surfaces within a microfluidic channel. Anal. Chem. 2010, 82, 3016–3022. [Google Scholar]
- Nakatani, K.; Sando, S.; Saito, I. Scanning of guanine-guanine mismatches in DNA by synthetic ligands using surface plasmon resonance. Nat. Biotechnol. 2001, 19, 51–55. [Google Scholar]
- Martin, W.L.; Bjorkman, P.J. Characterization of the 2:1 complex between the class I MHC-related Fc receptor and its Fc ligand in solution. Biochemistry 1999, 38, 12639–12647. [Google Scholar]
- Hu, G.Q.; Gao, Y.L.; Li, D.Q. Modeling micropatterned antigen-antibody binding kinetics in a microfluidic chip. Biosens. Bioelectron. 2007, 22, 1403–1409. [Google Scholar]
- Sundberg, F.; Karlsson, R. Rapid detection and characterization of immune responses using label-free biacore immunoassays. Immunology 2007, 120, 46–47. [Google Scholar]
- Squires, T.M.; Messinger, R.J.; Manalis, S.R. Making it stick: Convection, reaction and diffusion in surface-based biosensors. Nat. Biotechnol. 2008, 26, 417–426. [Google Scholar]
- Jiang, S.; Cao, Z. Ultralow-fouling, functionalizable, and hydrolyzable zwitterionic materials and their derivatives for biological applications. Adv. Mater. 2010, 22, 920–932. [Google Scholar]
- Vaisocherová, H.; Yang, W.; Zhang, Z.; Cao, Z.; Cheng, G.; Piliarik, M.; Homola, J.I.; Jiang, S. Ultralow fouling and functionalizable surface chemistry based on a Zwitterionic polymer enabling sensitive and specific protein detection in undiluted blood plasma. Anal. Chem. 2008, 80, 7894–7901. [Google Scholar]
- Zhang, Z.; Chao, T.; Chen, S.; Jiang, S. Superlow fouling sulfobetaine and carboxybetaine polymers on glass slides. Langmuir 2006, 22, 10072–10077. [Google Scholar]
- McDonald, J.C.; Duffy, D.C.; Anderson, J.R.; Chiu, D.T.; Wu, H.K.; Schueller, O.J.A.; Whitesides, G.M. Fabrication of microfluidic systems in poly(dimethylsiloxane). Electrophoresis 2000, 21, 27–40. [Google Scholar]
- Thorsen, T.; Maerkl, S.J.; Quake, S.R. Microfluidic large-scale integration. Science 2002, 298, 580–584. [Google Scholar]
- Duffy, C.D.; McDonald, J.C.; Schueller, O.J.A.; Whitesides, G.M. Rapid prototyping of microfluidic systems in poly(dimethylsiloxane). Anal. Chem. 1998, 70, 4974–4984. [Google Scholar]
- Han, J.; Craighead, H.G. Entropic trapping and sieving of long DNA molecules in a nanofluidic channel. J. Vac. Sci. Technol. 1999, 17, 2142–2147. [Google Scholar]
- Neils, C.; Tyree, Z.; Finlayson, B.; Folch, A. Combinatorial mixing of microfluidic streams. Lab Chip 2004, 4, 342–350. [Google Scholar]
- Fainman, Y.; Lee, L.; Psaltis, D.; Yang, C. Optofluidics: Fundamentals, Devices and Applications, 1st ed.; McGraw-Hill: Maidenhead, UK, 2009; p. 544. [Google Scholar]
- Rabe, M.; Verdes, D.; Seeger, S. Understanding protein adsorption phenomena at solid surfaces. Adv. Colloid Interface Sci. 2011, 162, 87–106. [Google Scholar]
- Kishimoto, T. The biology of Interleukin-6. Blood 1989, 74, 1–10. [Google Scholar]
- Pradhan, A.D.; Manson, J.E.; Rifai, N.; Buring, J.E.; Ridker, P.M. C-reactive protein, interleukin 6, and risk of developing type 2 diabetes mellitus. J. Am. Med. Assoc. 2001, 286, 327–334. [Google Scholar]
- Serey, X.; Mandal, S.; Chen, Y.-F.; Erickson, D. DNA transport and delivery in thermal gradients near optofluidic resonators. Phys. Rev. Lett. 2012, 108, 048102:1–048102:5. [Google Scholar]
- Santiago-Cordoba, M.A.; Cetinkaya, M.; Boriskina, S.V.; Vollmer, F.; Demirel, M.C. Ultrasensitive detection of a protein by optical trapping in a photonic-plasmonic microcavity. J. Biophoton. 2012, 5, 629–638. [Google Scholar]
- Yang, A.H.J.; Moore, S.D.; Schmidt, B.S.; Klug, M.; Lipson, M.; Erickson, D. Optical manipulation of nanoparticles and biomolecules in sub-wavelength slot waveguides. Nature 2009, 457, 71–75. [Google Scholar]
- Ashkin, A.; Dziedzic, J.M.; Yamane, T. Optical trapping and manipulation of single cells using infrared-laser beams. Nature 1987, 330, 769–771. [Google Scholar]
- Ashkin, A.; Dziedzic, J.M.; Bjorkholm, J.E.; Chu, S. Observation of a single-beam gradient force optical trap for dielectric particles. Opt. Lett. 1986, 11, 288–290. [Google Scholar]
- Talbot, L.; cheng, R.K.; Schefer, R.W.; Willis, D.R. Thermophoresis of particles in a heated boundary-layer. J. Fluid Mech. 1980, 101, 737–758. [Google Scholar]
- Rispens, T.; Velthuis, H.T.; Hemker, P.; Speijer, H.; Hermens, W.; Aarden, L. Label-free assessment of high-affinity antibody-antigen binding constants. Comparison of bioassay, SPR, and PEIA-ellipsometry. J. Immunol. Meth. 2011, 365, 50–57. [Google Scholar]
- Pease, L.F.; Elliott, J.T.; Tsai, D.H.; Zachariah, M.R.; Tarlov, M.J. Determination of protein aggregation with differential mobility analysis: Application to IgG antibody. Biotechnol. Bioeng. 2008, 101, 1214–1222. [Google Scholar]
- Lang, I.; Scholz, M.; Peters, R. Molecular mobility and nucleocytoplasmic flux in hepatoma-cells. J. Cell Biol. 1986, 102, 1183–1190. [Google Scholar]
- Schroder, M.; von Lieres, E.; Hubbuch, J. Direct quantification of intraparticle protein diffusion in chromatographic media. J. Phys. Chem. B 2006, 110, 1429–1436. [Google Scholar]
- Van Snick, J. Interleukin-6—An overview. Ann. Rev. Immunol. 1990, 8, 253–278. [Google Scholar]
- Gervais, T.; Jensen, K.F. Mass transport and surface reactions in microfluidic systems. Chem. Eng. Sci. 2006, 61, 1102–1121. [Google Scholar]
- Homola, J.; Yee, S.S.; Gauglitz, G. Surface plasmon resonance sensors: Review. Sens. Actuators B: Chem. 1999, 54, 3–15. [Google Scholar]
- Bergman, T.L.; Lavine, A.S.; Incropera, F.P.; DeWitt, D.P. Fundamentals of Heat and Mass Transfer, 7th ed.; Wiley: New York, NY, USA, 2011. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value/Range |
|---|---|---|
| kf | Association rate constant | 9 × 106 L/mol·s a |
| kr | Dissociation rate constant | 6 × 10−5 s−1a |
| KD | Dissociation equilibrium constant | 6.67 × 10−12 M |
| [B]m | Total surface concentration of binding sites on the sensor (also referred to as antibody concentration) | 1.66 × 10−9 mol/m2 to 1.66 × 10−8 mol/m2a |
| D | Bulk diffusion coefficient of IL-6 in water | 1 × 10−10 m2/s a |
| [A]0 | Inlet concentration of IL-6 in the bulk solution | 10−13 M to 10−7 M |
| v̅in | Inlet average fluid velocity | 5 × 10−5 m/s to 0.4 m/s |
aRate constant values are from Rispens et al.[39].bUpper limit of the range was estimated from the measured size of a single human IgG antibody [40].cEstimated from data on diffusion coefficients as a function of molecular weight [41,42] and IL-6 protein mass data [43].
© 2012 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Murthy, C.R.; Armani, A.M. Mass Transport Effects in Suspended Waveguide Biosensors Integrated in Microfluidic Channels. Sensors 2012, 12, 14327-14343. https://doi.org/10.3390/s121114327
Murthy CR, Armani AM. Mass Transport Effects in Suspended Waveguide Biosensors Integrated in Microfluidic Channels. Sensors. 2012; 12(11):14327-14343. https://doi.org/10.3390/s121114327
Chicago/Turabian StyleMurthy, Chaitanya R., and Andrea M. Armani. 2012. "Mass Transport Effects in Suspended Waveguide Biosensors Integrated in Microfluidic Channels" Sensors 12, no. 11: 14327-14343. https://doi.org/10.3390/s121114327