The Electromechanical Behavior of a Micro-Ring Driven by Traveling Electrostatic Force

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
: There is no literature mentioning the electromechanical behavior of micro structures driven by traveling electrostatic forces. This article is thus the first to present the dynamics and stabilities of a micro-ring subjected to a traveling electrostatic force. The traveling electrostatic force may be induced by sequentially actuated electrodes which are arranged around the flexible micro-ring. The analysis is based on a linearized distributed model considering the electromechanical coupling effects between electrostatic force and structure. The micro-ring will resonate when the traveling speeds of the electrostatic force approach some critical speeds. The critical speeds are equal to the ratio of the natural frequencies to the wave number of the correlative natural mode of the ring. Apart from resonance, the ring may be unstable at some unstable traveling speeds. The unstable regions appear not only near the critical speeds, but also near some fractions of some critical speeds differences. Furthermore the unstable regions expand with increasing driving voltage. This article may lead to a new research branch on electrostatic-driven micro devices.1. Introduction
The principles of electrostatic forces are very commonly used in micro actuating/sensing devices because of the advantages rapid response, low power consumption, compatibility with the fabrication process of integrated circuits (ICs), and being integrable with ICs. The electrostatic driving principle consists of the coupling of two energy domains, namely the electrical and mechanical energy domains. It is very challenging to accurately model electrostatic microstructures because of their nonlinear electromechanical coupling behavior. Furthermore effects such as non-ideal boundary conditions, fringing fields, the pre-deformation induced by initial stresses, and non-homogeneous structures further complicate the modeling. A review paper [10] presented an overview of the existing techniques applied to the MEMS electrostatic actuation modeling before 2005 and the dynamic behavior of the electromechanical system. Another review paper [2] provided an overview of the fundamental research before 2008 on nonlinear behaviors of electrostatic-driven microresonators, including direct and parametric resonances, parametric amplification, impacts, self-excited oscillations, and collective behaviors, such as localization and synchronization, which arise in coupled resonator arrays. Other review papers [3,4] present an overview of the existing analytical models before 2007 for electrostatically actuated microdevices. The author Hu had published a review paper [5] which introduced the techniques before 2010 for the physical model of pull-in voltage, dynamic characteristic analysis, air damping effect, reliability, numerical modeling method, and application of electrostatic-driven MEMS devices. Furthermore the effects of non-ideal boundary conditions, fringing fields, the pre-deformation induced by initial stresses, and non-homogeneous structures were also detailed in that review paper. The dynamic instability of a microstructure driven by alternative electrostatic forces was published by the author Hu [6] for the first time in 2004. After that more and more literature about the dynamic instability of a microstructure driven by electrostatic forces was published. After surveying the large number of correlative literatures mentioned in the aforesaid literatures, we find that there is no literature investigating the electromechanical behavior of a microstructure driven by traveling electrostatic forces. Therefore this paper presents for the first time the study of the dynamics and stabilities of microstructures driven by traveling electrostatic forces.
We develop a theoretical model of a micro-ring driven by a radial electrostatic force which travels around the circumference of the micro-ring. The micro-ring model is based on the theory of vibrations of a circular ring [7]. The traveling electrostatic force is modeled as a concentrated electrostatic force in the radial direction which travels around the circumference of the micro-ring. The magnitude of the traveling electrostatic force is proportional to the square of the driving voltage and inversely proportional to the square of the gap between the micro-ring and the driving electrodes [6]. The moving feature of the traveling concentrated electrostatic force is modeled based on the author Hu’s published work [8], namely as a Dirac delta function whose location varies with the traveling speed. First of all, a linearized dimensionless governing equation is derived based on the aforesaid assumptions, which is a linear partial differential equation with periodically time-varying coefficient. For the geometrical periodicity of the circular ring, we make an inspired guess of the deflection function to discretize the governing equation, which results in a set of linear ordinary differential equations with periodically time-varying coefficients. Then we solve the discretized governing equation by the Runge-Kutta numerical integration method, which is available in the commercial software MATLAB. The dynamics and stabilities of the micro-ring are both studied in this article. The Floquet theory [9,10] is used to determine whether the micro-ring is stable or not.
2. Theoretical Modeling
2.1. Linearized Non-Dimensional Governing Equation
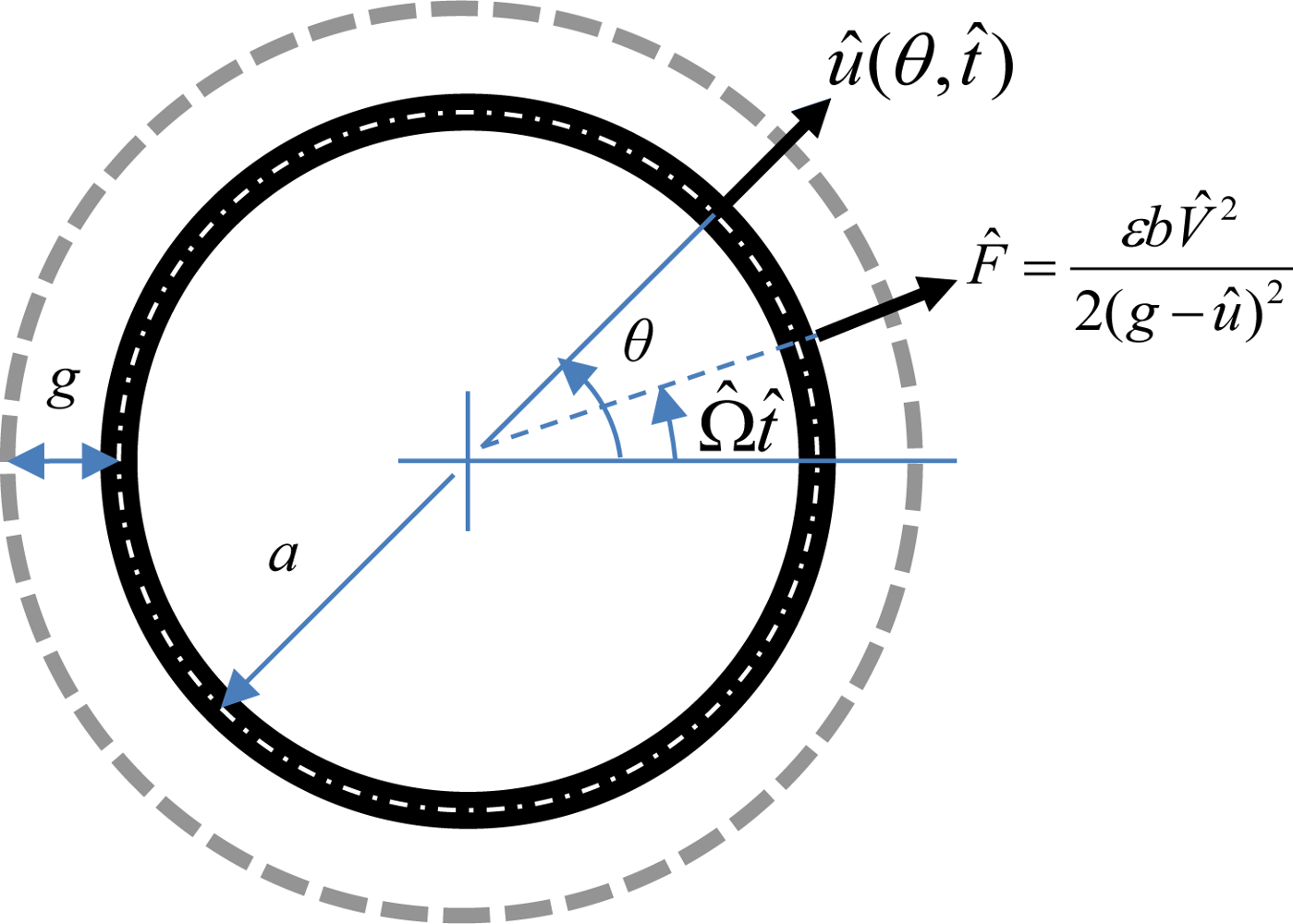
Figure 1 shows a flexible micro-ring of radius a surrounded by a circle of fixed-electrodes between them a gap of g. A bias voltage V̂ applied sequentially on the fixed-electrodes sets up an electrostatic force F̂ (= εbV̂2/2(g − û)2) per unit length traveling at an angular speed of Ω̂ around the circumference of the micro-ring in the radial direction. The micro-ring, when subjected to the traveling electrostatic force, will oscillate with respect to its neutral axis at the deflection of û(θ,t̂). Based on the assumptions that the micro-ring is thin with respect to its radius and that deflection is reasonably small, and if there is no circumferential forcing and if its circumferential inertia term can be negligible [6–8], then its equation of motion in a polar coordinate system is:
Here we introduce the following dimensionless variables:
Expanding the nonlinear term of the electrostatic force by Taylor’s series about the initial equilibrium position of the micro-ring, say u = 0:
Let us inspect Equation (5); the terms in the first bracket are attributed to the mechanical characteristics of the micro-ring, while the second term, −2δ(θ − Ωt)V2, is attributed to the electrostatic force, which shows that the dynamical characteristics of the micro-ring will be altered by the driving voltage V as well as the traveling speed Ω.
2.2. Discretized Governing Equation
For the geometrical periodicity of a circular ring, one can make an inspired guess of the deflection function:
Since the sine and cosine functions are orthogonal, we may proceed as in a Fourier analysis. We multiply the equation on both sides by cos mθ and sin mθ, where m, in general, is either equal to k or not:
Integrating Equations (8) and (9) over the ring circumference gives:
Using the following orthogonality conditions of trigonometric functions and the characteristics of the Dirac delta function:
Since Equation (16) is of the form of a n degree of freedom oscillator equation, it has become customary to view this equation in terms of modal mass, stiffness, and forcing, where [I] is an identity modal mass matrix of order 2n, [Ks] is the structural modal stiffness matrix of order n, [Ke1], [Ke2], and [Ke3] are the n-th order electrical modal stiffness matrices attributed to the traveling electrostatic forces, {X} is the general coordinates, {Q} is the generalized forcing function. Their elements are given as the following:
Equation (16) reveals that the total stiffness matrix is the difference of the structural stiffness matrix and the electrical stiffnes matrix, i.e.,
From the Equations (19) to (23), we know that [K1] and [K3] are symmetrical while [K2] is not. The total stiffness matrix is a periodically time-varying function whose oscillation is proportional to V2 and frequencies are (i – j) and (i + j) times the traveling speed Ω.
3. Free Vibration of the Ring Structure
Consider the free vibration of the ring, namely the homogeneous part of Equation (3):
For the case of free vibration, Equation (15) is simplified to:
Since, in general, ᾱk and β̄k are both nonzero, it must be that the determinant is zero, namely the eigenvalues and the correlative eigenvectors are the natural modes of the ring. Thus, for each vale of k which also refers to the wave number, we encounter a dimensionless natural frequency:
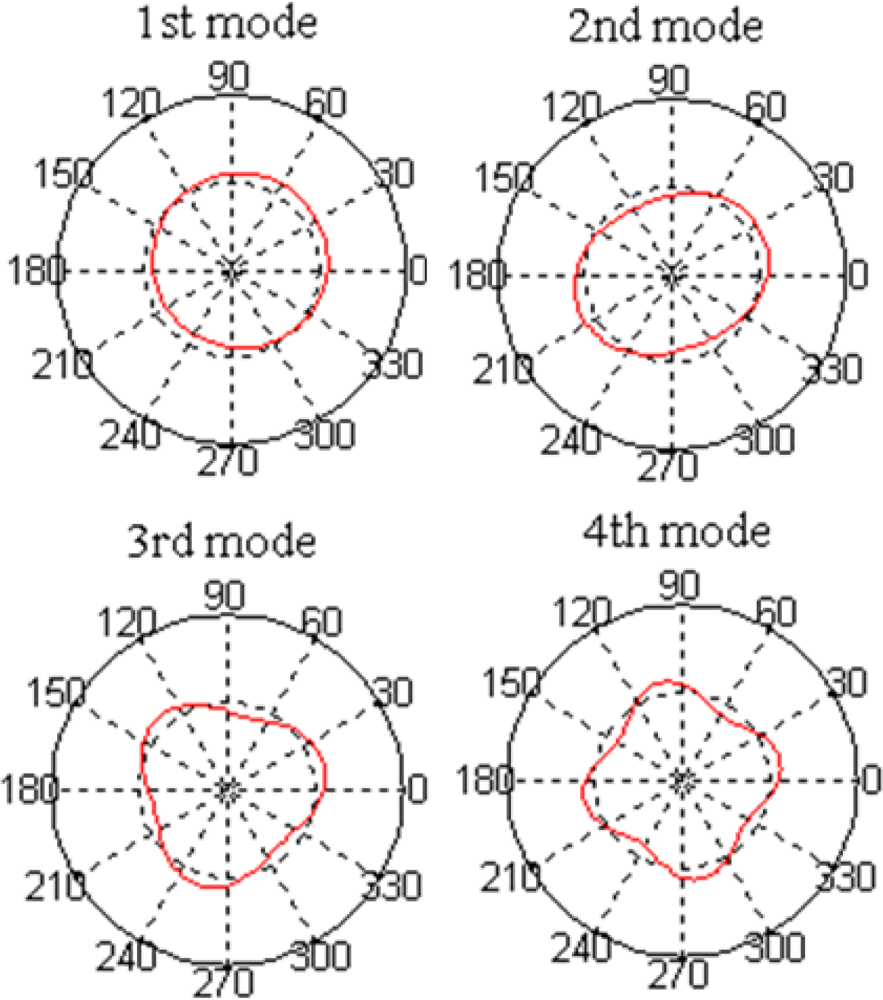
Figure 2 shows the first four natural modes (k = 1 ∼ 4) which are obtained from Equation (29). The first natural mode is a rigid-body mode whose natural frequency is zero and the others are flexible modes.
4. Dynamic Response
4.1. The Dynamic Response of a Traveling Constant Force
First of all, let us consider the case of a ring driven by a constant force traveling around its circumference. Then Equation (3) is simplified to:
Substituting Equation (32) into Equation (6), we get the response of the ring:
The response at the position of the traveling constant force is:
When the traveling speeds approach the values which make the denominators in Equation (34) equal to zero, the ring is resonant and that speed is called the critical speed Ωcr. By equating the denominators in Equation (34) to zero, we can obtain the critical speeds corresponding to each mode:
4.2. The Dynamic Response of a Traveling Electrostatic Force
To obtain the dynamic response of Equation (16), we have to use numerical integration because it is a periodically time-varying system. To solve by numerical integration, one has to transform Equation (16) into state space. We define the state vector as:
Consequently we can obtain the solution by numerical integration:
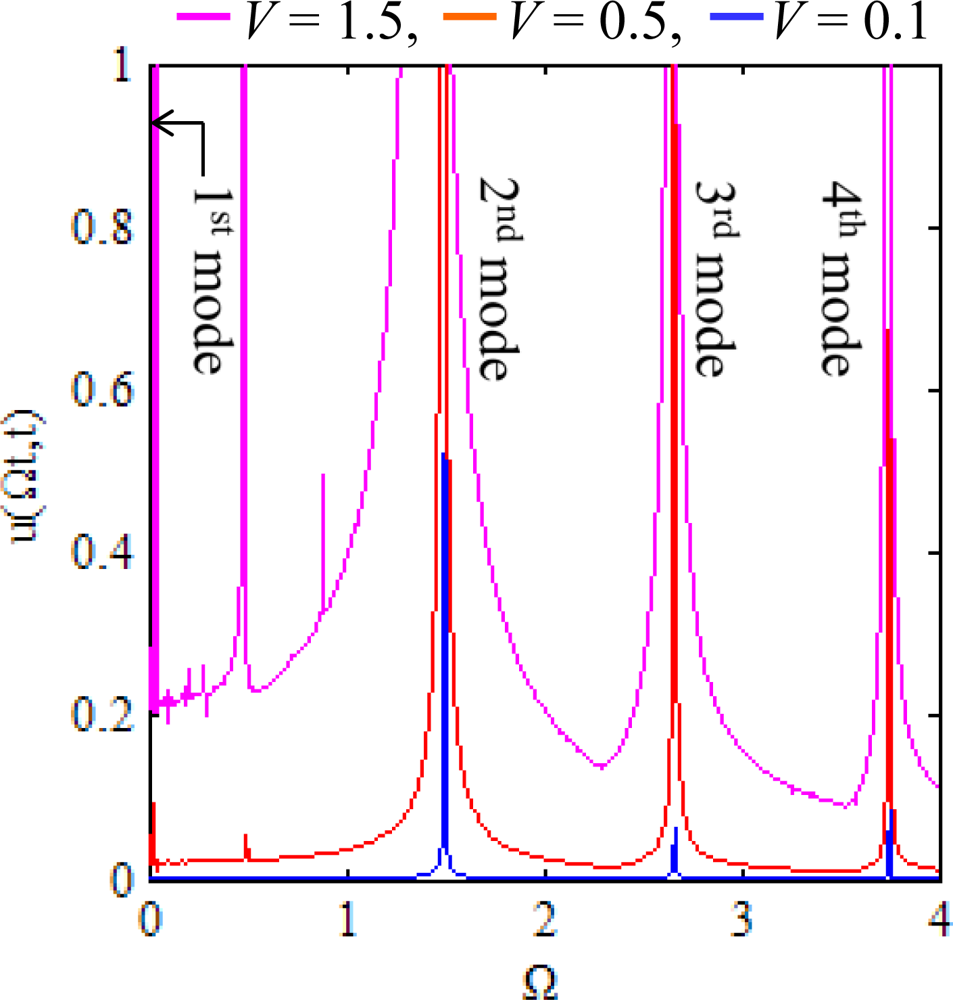
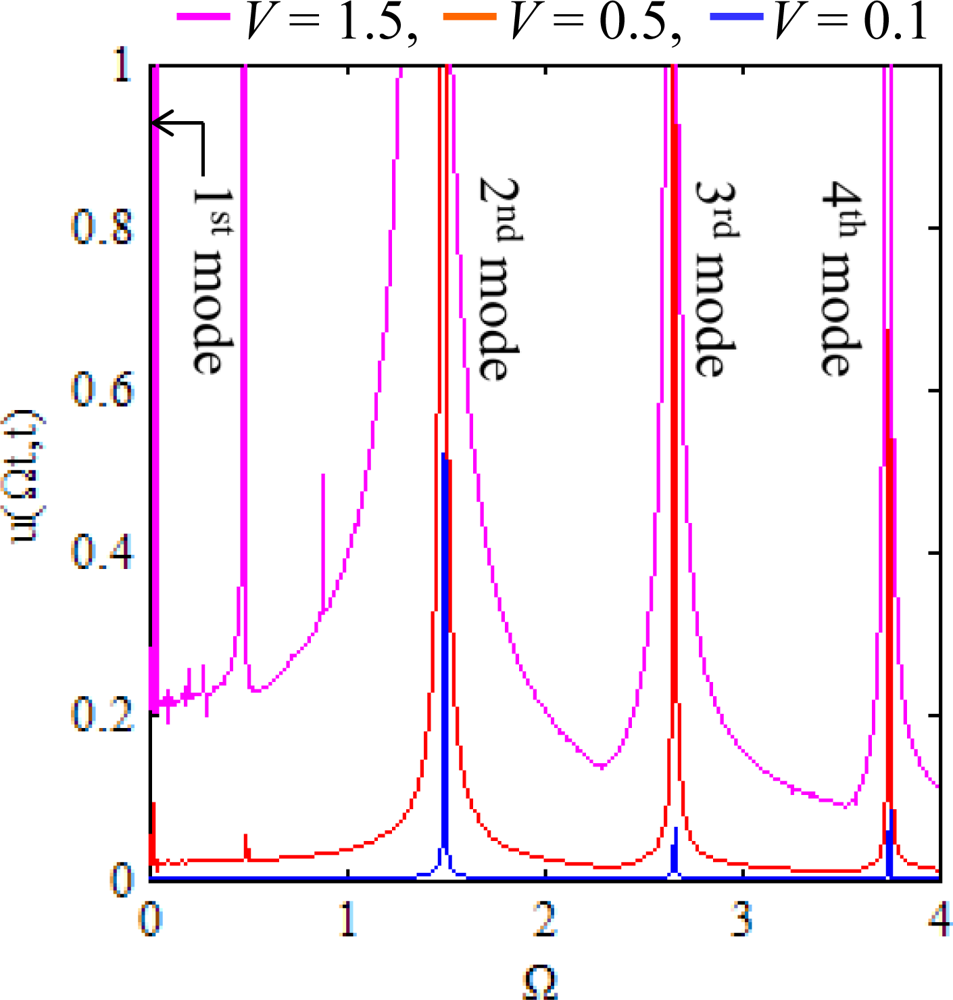
We adopt the first four modes expansion (n = 1 ∼ 4) and the commercial software MATLAB for numerical integration. Figure 3 shows the response spectrum of the ring at the location of traveling electrostatic force. Apparently there are four critical speeds, Ωcr,k = ωk/k, corresponding to the first four natural modes of the ring. However some peaks other than the natural modes of the ring appear. Therefore, apart from resonance, the ring may be unstable at some unstable traveling speeds.
5. Stability Analysis
According to the results of dynamic response, the ring driven by a traveling electrostatic force may be unstable or resonant at the critical speeds of the electrostatic force. Therefore, we have to consider the dynamic instability. Let us consider the homogeneous part of Equation (37), namely:
By the Runge-Kutta numerical integration method, we obtain 4n linear independent homogeneous solutions of Equation (42) in one period T, namely {Y(T)}1, {Y(T)}2, …, {Y(T)}4n. The linear independent homogeneous solutions construct the monodromy matrix [C], also known as state transition matrix, i.e.,
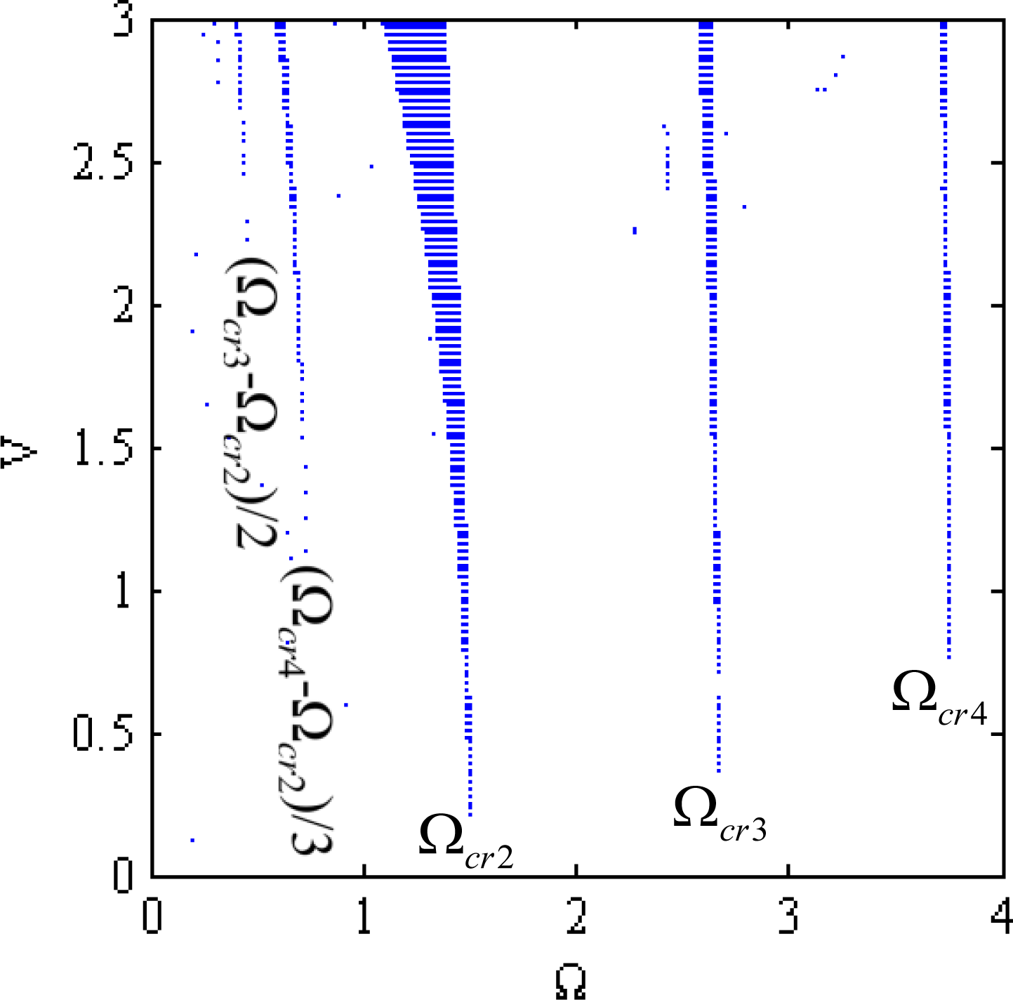
The stability can be determined by the nature of the eigenvalues (λ) of the monodromy matrix [C] [9,10]. The system is stable if all the eigenvalues have magnitudes less than unity, i.e., |λ| < 1, unstable if at least one eigenvalue greater than unity, i.e., |λ| > 1, and marginally stable if at least one eigenvalue with unit magnitude and multiplicity less than unity. Figure 4 shows the numerical results of stability analysis in the first three flexible modes region. The instable regions appear not only near Ωcr,k = ωk/k but also near some fractions of critical speeds differences, say (Ωcr,3 − Ωcr,2)/2, (Ωcr,4 − Ωcr,2)/3, …etc. Furthermore the instable regions expand with increasing driving voltage.
6. Conclusions
This paper presents a simplified analytical model for a micro-ring driven by a concentrated electrostatic force which is traveling around its circumference in a radial direction based on the small deflection assumption. We study the dynamics and stabilities of the micro-ring based on the present analytical model and find some interesting phenomena. The micro-ring will resonate when the traveling speeds approach some critical values which are exactly equal to the ratio of the natural frequency to the wave number of each natural mode of the micro-ring. Besides, it will be unstable when the combination of the traveling speed and driving voltage approaches some values. The unstable regions appear not only near the critical speeds, but also near some fractions of critical speed differences. Furthermore, the unstable regions expand with increasing driving voltage.
Acknowledgments
The authors are thankful for the financial support of this research from the National Science Council of Taiwan under grant no. NSC 100-2628-E-197-001-MY3.
References
- Marquès, A.F.; Castelló, R.C.; Shkel, A.M. Modeling the Electrostatic Actuation of MEMS: State of the Art; Universitat Politècnica de Catalunya, Institut d’Organització i Control de Sistemes Industials: Barcelona, Spain, 2005; IOC-DT-P-2005-18. [Google Scholar]
- Rhoads, J.; Shaw, S.W.; Turner, K.L. Nonlinear Dynamics and Its Applications in Micro- and Nano-Resonators. Proceedings of the DSCC 2008: The 2008 ASME Dynamic Systems and Control Conference, Ann Arbor, MI, USA, 20–22 October 2008.
- Batra, R.C.; Porfiri, M.; Spinello, D. Review of modeling electrostatically actuated microelectromechanical systems. Smart Mater. Struct 2007, 16, R23–R31. [Google Scholar]
- Zhang, W.M.; Meng, G.; Chen, D. Stability, nonlinearity and reliability of electrostatically actuated MEMS devices. Sensors 2007, 7, 760–796. [Google Scholar]
- Chuang, W.C.; Lee, H.L.; Chang, P.Z.; Hu, Y.C. Review on the modeling of electrostatic MEMS. Sensors 2010, 10, 6149–6171. [Google Scholar]
- Hu, Y.C.; Chang, C.M.; Huang, S.C. Some design considerations on the electrostatically actuated microstructures. Sens. Actuat. A 2004, 112, 155–161. [Google Scholar]
- Soedel, W. Vibrations of Shells and Plates, 2nd ed.; Marcel Dekker, Inc: New York, NY, USA, 1993; pp. 66–67. [Google Scholar]
- Hu, Y.C.; Huang, S.C. Forced response of sandwicth ring with viscoelastic core subjected to traveling loads. J. Acoust. Soc. Am 1999, 106, 202–210. [Google Scholar]
- Richards, J.A. Analysis of Periodically Time-Varying Systems; Springer-Verlag: Berlin, Germany, 1983; pp. 27–49. [Google Scholar]
- Farhang, K.; Midha, A. Steady-state response of periodically time-varying linear systems with application to an elastic mechanism. J. Mech. Des 1995, 117, 633–639. [Google Scholar]



© 2012 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Ye, X.; Chen, Y.; Chen, D.-C.; Huang, K.-Y.; Hu, Y.-C. The Electromechanical Behavior of a Micro-Ring Driven by Traveling Electrostatic Force. Sensors 2012, 12, 1170-1180. https://doi.org/10.3390/s120201170
Ye X, Chen Y, Chen D-C, Huang K-Y, Hu Y-C. The Electromechanical Behavior of a Micro-Ring Driven by Traveling Electrostatic Force. Sensors. 2012; 12(2):1170-1180. https://doi.org/10.3390/s120201170
Chicago/Turabian StyleYe, Xiuqian, Yibao Chen, Da-Chih Chen, Kuo-Yi Huang, and Yuh-Chung Hu. 2012. "The Electromechanical Behavior of a Micro-Ring Driven by Traveling Electrostatic Force" Sensors 12, no. 2: 1170-1180. https://doi.org/10.3390/s120201170