PAU-SA: A Synthetic Aperture Interferometric Radiometer Test Bed for Potential Improvements in Future Missions

 , ,
, ,
Abstract
:1. Introduction
- an L-band radiometer to measure the brightness temperature,
- a reflectometer to measure the sea state using reflected Global Positioning System (GPS) opportunity signals, sharing the Radio Frequency (RF) front-end, with the radiometer, and
- an Infrared Radiometer (IR) to measure the physical surface temperature.
2. Basic Concepts on Interferometric Radiometry
- 𝛀m,n are the equivalent solid angles of the antennas,
- is the TB of the scene atp − q polarization [13] (Ep and Eq being the electric fields at p and q polarizations),
- Trec is the physical temperature of the receiver (the so-called Corbella's term) [12],
- δpq is the Kronecker's delta function: δpq = 1if p = q and δpq = 0 if p ≠ q,
- is the so-called fringe-washing function. This term is related to the limited bandwidth and the frequency response of the filters in the two receivers forming the baseline, being , and
- is the obliquity factor.
2.1. Ideal Situations
3. PAU-SA Description
3.1. PAU-SA Instrument Overview
3.2. PAU-SA Instrument Description
3.2.1. Antenna Array
3.2.2. Receiver
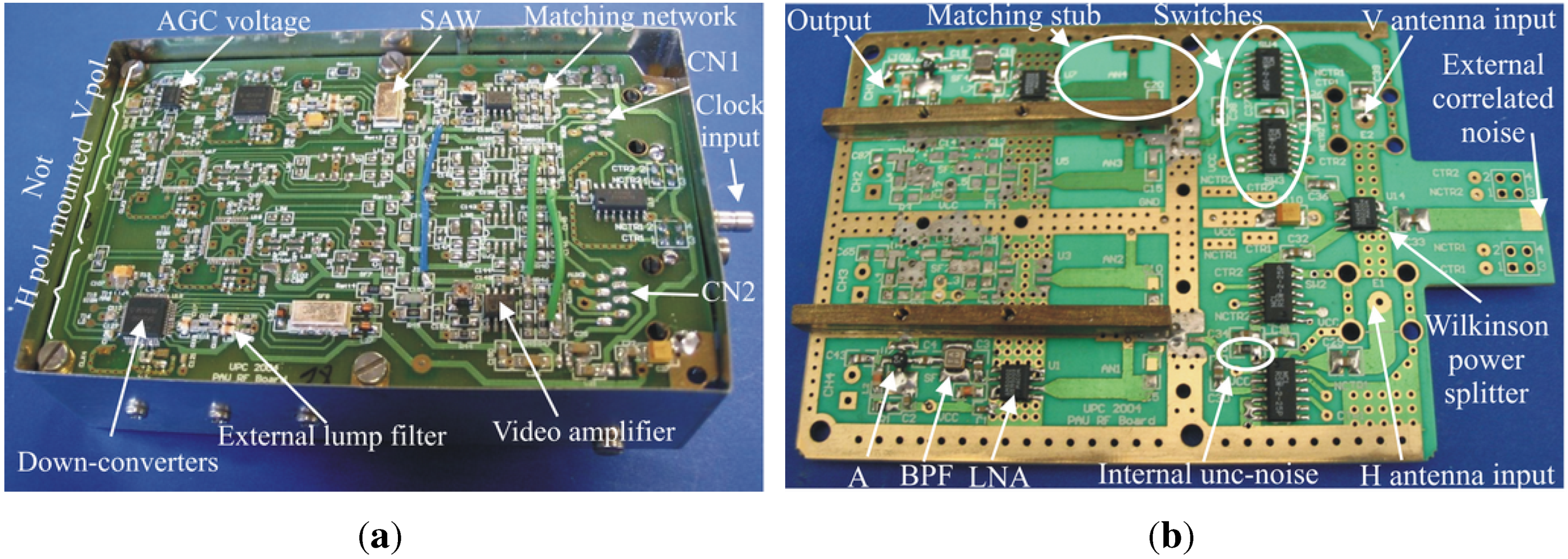
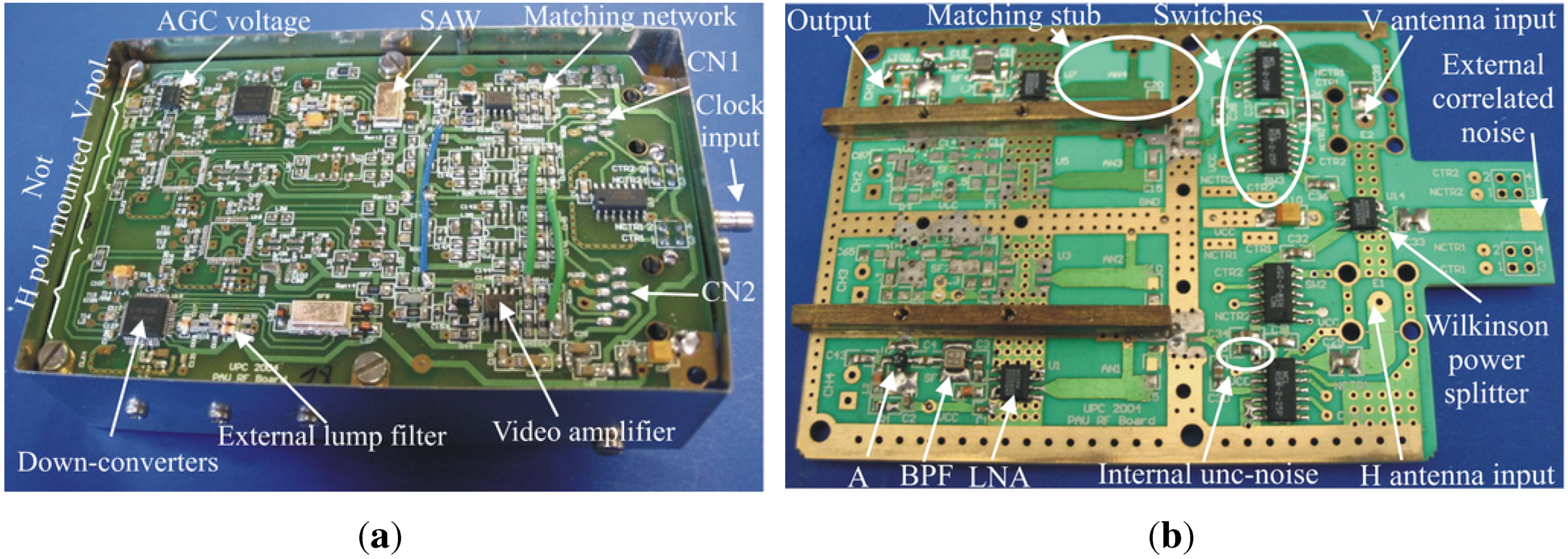
3.2.2.1. RF Stage
3.2.2.2. IF Stage
3.2.2.3. PAU-SA's Receiver Implementation
3.2.3. Digital Sub-Systems
- In-phase (I) and quadrature (Q) demodulation of the receivers' output digital signals coming from the array of 8 bits ADC),
- Digital Low Pass Filter (LPF) at 8 bits,
- Power estimation system of the 50 receivers' output signals (25 receivers × 2 polarizations @ 8 bits).
- Correlation unit of the three correlation matrices (V, H, VH) @ 1 bit, and
- Communication protocol and control with a PC, and data collection.
3.2.3.1. Sampling Frequency
3.2.3.2. I/Q Demodulation Unit
3.2.4. Power Measurement
3.2.5. Digital Correlation Unit (DCU)
3.2.7. General Description of the Mobile Unit
4. PAU-SA's Processing Implementation
- Since the I/Q demodulation is performed digitally, quadrature errors are zero and do not have to corrected.
- System temperatures are measured with digital PMS, therefore they are insensitive to offset and slope drifts as opposed to their analog counter parts,
- Visibility offsets are measured with an internal matched load and by looking to an external absorber, and
- Phase and amplitudes of the visibility samples are measured using either a centralized noise source or a pseudo-random noise sequence PRN [36].
5. Inter-Comparison between MIRAS and PAU-SA
- I/Q down-conversion to eliminate quadrature errors,
- Digital filtering, replacing the narrow RF filter by a digital IF filter, to obtain a mass reduction, a quasi perfect matching, and eliminating thermal and frequency drifts, and
- Digital Power estimation, eliminating the classical Schottky or tunnel diodes to achieve a mass reduction, and eliminating temperature drifts and aging.
5.1. Impact of the Frequency Operation on the Radiometer Part
5.2. Impact of the Spatial Decorrelation Effects in the Visibility Function
6. Instrument Characterization and Experimental Results
6.1. Thermal Control Characterization
6.2. Measurements at Baseline Level
6.2.1. Radiometer Stability
6.3. Radiometer Resolution Validation
6.4. Experimental Results
- The radiometric resolution is the standard deviation of the time fluctuation of a given observable. It is the minimum change detectable by the instrument and it is computed as in Equation (50). It has been found to be σv,h =1.9 K at both polarizations.
- The radiometric precision is the systematic error in each pixel. An average radiometric precision value is computed for the whole alias-free field-of-view image as the RMS value of the brightness temperature computed from the average of 80 snapshots of 3 s integration time each (total 240 s), so as to achieve a negligible radiometric resolution). It is estimated by using Equation (51) σv = 1.2 K and σh = 2.0 K, and
- The radiometric bias is the spatial mean of the computed brightness temperature minus a reference temperature determined by Equation (52). It is found to be −1.6 K and −1.8 K, at vertical and horizontal polarizations, respectively.
7. Conclusions
Acknowledgments
References
- Barre, H.M.J.; Duesmann, B.; Kerr, Y.H. SMOS: The mission and the system. IEEE Trans. Geosci. Remote Sens. 2008, 46, 587–593. [Google Scholar]
- Le Vine, D.M.; Lagerloef, G.S.E.; Colomb, F.R.; Yueh, S.H.; Pellerano, F.A. Aquarius: An instrument to monitor sea surface salinity from space. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2040–2050. [Google Scholar]
- Entekhabi, D.; Njoku, E.G.; O'Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J.; et al. The Soil Moisture Active Passive (SMAP) mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar]
- Dicke, R.H. The measurement of thermal radiation at microwave frequencies. Rev. Sci. Instrum. 1946, 17, 268–275. [Google Scholar]
- Camps, A. Passive Advanced Unit (PAU): A hybrid L-band radiometer, GNSS-Reflectometer and IR-Radiometer for Passive Remote Sensing of the Ocean, Project descriptions of the EURYI award winners 2004 Telecommunications Engineering, 2004. Avalilable online: http://www.esf.org/activities/euryi/awards/2004.html (accessed on 06 June 2012).
- Ramos-Perez, I. PAU-Synthetic Aperture: A New Instrument to Test Potential Improvements for Future Interferometric Radiometers. Ph.D. thesis, Universitat Politecnica de Catalunya, Barcelona, Spain, 2012. Available online: http://www.tdx.cat/handle/10803/80600/ (accessed on 24 May 2012). [Google Scholar]
- Bosch-Lluis, X. On the Desing of Microwave Radiometers with Digital Beamforming and Polarization Synthesis for Earth Obervation. Ph.D. thesis, Universitat Politecnica de Catalunya, Barcelona, Spain, 2011. Available online: http://www.tdx.cat/handle/10803/21797/ (accessed on 24 May 2012). [Google Scholar]
- Font, J.; Camps, A.; Borges, A.; Martin-Neira, M.; Boutin, J.; Reul, N.; Kerr, Y.H.; Hahne, A.; Mecklenburg, S. SMOS: The challenging sea surface salinity measurement from space. Proc. IEEE 2010, 98, 649–665. [Google Scholar]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.J.; Font, J.; Reul, N.; Gruhier, C.; et al. The SMOS mission: New tool for monitoring key elements of the global water cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar]
- Ramos-Perez, I.; Forte, G.F.; Camps, A.; Bosch-Lluis, X.; Valencia, E.; Rodriguez-Alvarez, N.; Park, H.; Vall-llosera, M. Calibration, performance, and imaging tests of a fully digital synthetic aperture interferometer radiometer. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, PP, 1–12. [Google Scholar]
- Goodman, J.W. Statistical Optics; Wiley Interscience: New York, NY, USA; p. 1985.
- Corbella, I.; Duffo, N.; Vall-llossera, M.; Camps, A.; Torres, F. The visibility function in interferometric aperture synthesis radiometry. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1677–1682. [Google Scholar]
- Martín-Neira, M.; Ribó, S.; Martin-Polegre, A.J. Polarimetric mode of MIRAS. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1755–1768. [Google Scholar]
- Balanis, C.A. Antenna Theory: Analysis and Design, 3rd ed.; Wiley-Interscience: New York, NY, USA, 2005; pp. 811–882. [Google Scholar]
- Camps, A.; Bara, J.; Torres, F.; Romeu, J. Impact of antenna errors on the radiometric accuracy of large aperture synthesis radiometers. Radio Sci. 1997, 32, 657–668. [Google Scholar]
- Camps, A.; Torres, F.; Corbella, I.; Bara, J.; De Paco, J. Mutual coupling effects on antenna radiation pattern: An experimental study applied to interferometric radiometers. Radio Sci. 1998, 33, 1543–1552. [Google Scholar]
- Martíýn-Neira, M. A Passive Reflectometry and Interferometry System (PARIS): Application to ocean altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- SiGe GN3S Sampler v.2. Available online: http://www.sparkfun.com/products/8238/ (accessed on 10 May 2012).
- Zarlink.com web. Available online: http://www.zarlink.com/zarlink/gp2015-datasheet-sept2007.pdf (accessed on 10 May 2012).
- Martíýn-Neira, M.; Pironen, P.; Camps, A. Digital Signal Power measurement circuit. ESA Patent No. 471, 2001.
- Xilinx.com web. Available online: http://www.xilinx.com/support/documentation/data_sheets/ds112.pdf (accessed on 10 May 2012).
- Ramos-Perez, I.; Bosch-Lluis, X.; Camps, A.; Marchan-Hernandez, J.F.; Prehn, R.; Izquierdo, B. Design of a Compact Dual-Polarization Receiver for Pseudo-Correlation Radiometers at L-Band. Proceedings of the IEEE International Conference Geoscience and Remote Sensing Symposium (IGARSS 2006), Denver, Colorado, 31 July– 4 August 2006; pp. 1172–1175.
- Noise.com web. Available online: http://noisecom.com/∼/media/Noisecom/Datasheets/NC346_Datasheet.ashx/ (accessed on 10 May 2012).
- Paar, C.; Pelzl, J. Understanding Cryptography: A Textbook for Students and Practitioners; Springer-Verlag: New York, NY, USA, 2010. [Google Scholar]
- Minicircuits.com web. Available online: http://www.dlpdesign.com/fpga/dlp-fpga-ds-v14.pdf (accessed on 10 May 2012).
- Minicircuits.com web. Available online: http://www.minicircuits.com/pdfs/VAT-30.pdf (accessed on 10 May 2012).
- Minicircuits.com web. Available online: http://www.minicircuits.com/pdfs/SLP-100+.pdf (accessed on 10 May 2012).
- Minicircuits.com web. Available online: http://www.minicircuits.com/pdfs/ZX05-U432H+.pdf (accessed on 10 May 2012).
- Synergymwave.com web. Available online: http://www.synergymwave.com/products/2/ds/FSW80150--10.pdf (accessed on 10 May 2012).
- Minicircuits.com web. Available online: http://www.minicircuits.com/pdfs/MSP2TA-18XL.pdf (accessed on 10 May 2012).
- Minicircuits.com web. Available online: http://www.minicircuits.com/pdfs/ZAPD-2--21--3W.pdf (accessed on 10 May 2012).
- Tarongi, J.M.; Camps, A. Multifrequency Experimental Radiometer with Interference Tracking for Experiments Over Land and Littoral: Meritxell. Proceedings of the EEE International Geoscience and Remote Sensing Symposium (IGARSS 2009), Cape Town, South Africa, 12–17 July 2009; Volume 4. pp. IV-653–IV-656.
- Hagen, J.B.; Farley, D.T. Digital-correlation techniques in radio science. Radio Sci. 1973, 8, 775–784. [Google Scholar]
- Dlala, E.; Arkkio, A. General Formulation for the Newton-Raphson Method and the Fixed-Point Method in Finite-Element Programs. Proceedings of the XIX International Electrical Machines (ICEM) Conference, Rome, Italiy, 6–8 September 2010; pp. 1–5.
- Martíýn-Neira, M.; Ribó, S.; Rautiainen, K. Correction of Comparator Threshold in 1-bit Interferometric Radiometers. Proceedings of the 8th Specialist Meeting on Microwave Radiometry and Remote Sensing Applications, MicroRad Rome, Italy, 24–27 February 2004. pp. 0–1.
- Pérez, I.R.; Bosch-Lluis, X.; Camps, A.; Alvarez, N.R.; Hernandez, J.F.M.; Domènech, E.V.; Vernich, C.; de la Rosa, S.; Pantoja, S. Calibration of correlation radiometers using pseudo-random noise signals. Sensors 2009, 9, 6131–6149. [Google Scholar]
- McMullan, K.D.; Brown, M.A.; Martin-Neira, M.; Rits, W.; Ekholm, S.; Marti, J.; Lemanczyk, J. SMOS: The payload. IEEE Trans. Geosci. Remote Sens. 2008, 46, 594–605. [Google Scholar]
- Minicircuits.com web. Available online: http://www.insidegnss.com/auto/julaug10-Erker.pdf (accessed on 10 May 2012).
- Tsui, J. Fundamentals of Global Positioning System Receivers: A Software Approach; Wiley Series in Microwave and Optical Engineering, John Wiley & Sons: Hoboken, NJ, USA, 2000. [Google Scholar]
- Rau, G.; Schieder, R.; Vowinkel, B. Characterization and Measurement of Radiometer Stability. Proceedings of the 14th European Microwave Conference, Liege, Belgium, 10–13 September 1984; pp. 248–253.
- Camps, A. Application of Interferometric Radiometry to Earth Observation. Ph.D. thesis, Universitat Politecnica de Catalunya, Barcelona, Spain, 1996. Available online: http://www.tdx.cat/handle/10803/6885/ (accessed on 24 May 2012). [Google Scholar]
- Anechoic Chamber UPC web. 2011. Available online: http://www.upc.edu/pct/es/equip/506/camara-anecoica.html/ (accessed on 2 April 2012).
- Allan, D.W. Statistics of atomic frequency standards. Proc. IEEE 1966, 54, 221–230. [Google Scholar]
- Christensen, J.; Carlstrom, A.; Ekstrom, H.; de Maagt, P.; Colliander, A.; Emrich, A.; Embretsen, J. GAS: The Geostationary Atmospheric Sounder. Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2007), Barcelona, Spain, 23- 27 July 2007; pp. 223–226.
- Lambrigtsen, B.; Brown, S.T.; Gaier, T.C.; Herrell, L.; Kangaslahti, P.P.; Tanner, A.B. Monitoring the hydrologic cycle with the PATH mission. Proc. IEEE 2010, 98, 862–877. [Google Scholar]
- Liu, H.; Wu, J.; Zhang, S.; Yan, J.; Zhang, C.; Sun, W.; Niu, L. Conceptual Design and Breadboarding Activities of Geostationary Interferometric Microwave Sounder (GIMS). Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2009), Cape Town, South Africa, 12– 17 July 2009; Volume 3. pp. 1039–1042.



























{kind=link}
| N° | Parameter | MIRAS/SMOS | PAU-SA | Comments |
|---|---|---|---|---|
| 1 | Altitude | Global observation, Low Earth Orbit (LEO): orbital altitude of 763 km, 3 days equatorial revisit time | On-ground | |
| 2 | Frequency operation | L-band (1,400–1,427 MHz) band is protected for passive observations | L1-band (1,575.42 MHz) GPS signal | Same frequency for Radiometer and GNSS-Reflectrometer |
| 3 | Bandwidth | 19 MHz | 2.2 MHz | Negligible spatial correlation effects |
| 4 | Number of antennas per arm | 4 m | 1.3 m | |
| 5 | Number total antennas | 69 | 31 | 8 × 3 + 1 = 25 for Radiometer, 3 center plus 3 additional = 7 antennas for GNSS-Reflectometer, 3dummy antennas, 1 at the end of each arm |
| 7 | Antenna type | Patch antenna without dielectric substrate and V & H polarizations (non-simultaneous) | Patch antenna without dielectric substrate and V & H polarizations (simultaneous) | Full-polarimetric (non-sequential) |
| 8 | Antenna spacing | 0.875λ at 1,400 MHz, 21 cm wavelength | 0.816λ at 1,575.42 MHz, 19 cm wavelength | Increase the alias-free field of view |
| 9 | Receiver type | 1 per element | 1 per polarization (2 per element) | Full-polarimetric possible (non-sequential) |
| 10 | Topology of the LO down-converter | Distributed local oscillator (LO) (groups of 6 elements) | Centralized reference clock + Internal LO generator | Elimination of correlation offsets due to LO noise leakage. |
| 11 | Quantization | 1 bit IF sampling depending upon the noise uptake level (Inside the LICEF) | 8 bit IF sub-sampling using an external ADC | (8 bits) for I/Q conversion and (1 bit) to power measurement |
| 12 | I/Q down-conversion | Analog | Digital | Mass reduction, no quadrature errors (calibration not required) |
| 13 | Frequency response shaped by | Analog RF filter | Digital low- pass filter | Mass reduction, quasi perfect matching, no temperature and frequency drifts |
| 14 | Power measurement system (PMS) | Analog (diode detector) | Multibit Digital (FPGA) Computation | Mass reduction, no temperature drifts |
| 15 | Digital Correlated Unit | FCLK =Fs | FCLK ≫ Fs | Clock frequency (FCLK) much higher than sampling frequency (Fs) allows hardware reuse and compute full-polarimetric correlation matrices in one snapshot inside FPGA |
| 16 | Image capabilities | Dual-polarization or full-polarimetric (sequential) | Full-polarimetric (non-sequential) | Necessary for GNSS-R applications |
| 17 | Integration time | 1.2 s | Variable: 4 values 1 s, 0.5 s, 100 ms, 10 ms | |
| 18 | Correlated Noise Injection | Distributed (Noise Source) | Centralized (Noise Source, or PRNs) | Using PRNs independent number of receivers (simpler and more flexible calibration) |
© 2012 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Ramos-Perez, I.; Camps, A.; Bosch-Lluis, X.; Rodriguez-Alvarez, N.; Valencia-Domènech, E.; Park, H.; Forte, G.; Vall-llosera, M. PAU-SA: A Synthetic Aperture Interferometric Radiometer Test Bed for Potential Improvements in Future Missions. Sensors 2012, 12, 7738-7777. https://doi.org/10.3390/s120607738
Ramos-Perez I, Camps A, Bosch-Lluis X, Rodriguez-Alvarez N, Valencia-Domènech E, Park H, Forte G, Vall-llosera M. PAU-SA: A Synthetic Aperture Interferometric Radiometer Test Bed for Potential Improvements in Future Missions. Sensors. 2012; 12(6):7738-7777. https://doi.org/10.3390/s120607738
Chicago/Turabian StyleRamos-Perez, Isaac, Adriano Camps, Xavi Bosch-Lluis, Nereida Rodriguez-Alvarez, Enric Valencia-Domènech, Hyuk Park, Giuseppe Forte, and Merce Vall-llosera. 2012. "PAU-SA: A Synthetic Aperture Interferometric Radiometer Test Bed for Potential Improvements in Future Missions" Sensors 12, no. 6: 7738-7777. https://doi.org/10.3390/s120607738