A Novel Scheme for DVL-Aided SINS In-Motion Alignment Using UKF Techniques

Abstract
:1. Introduction
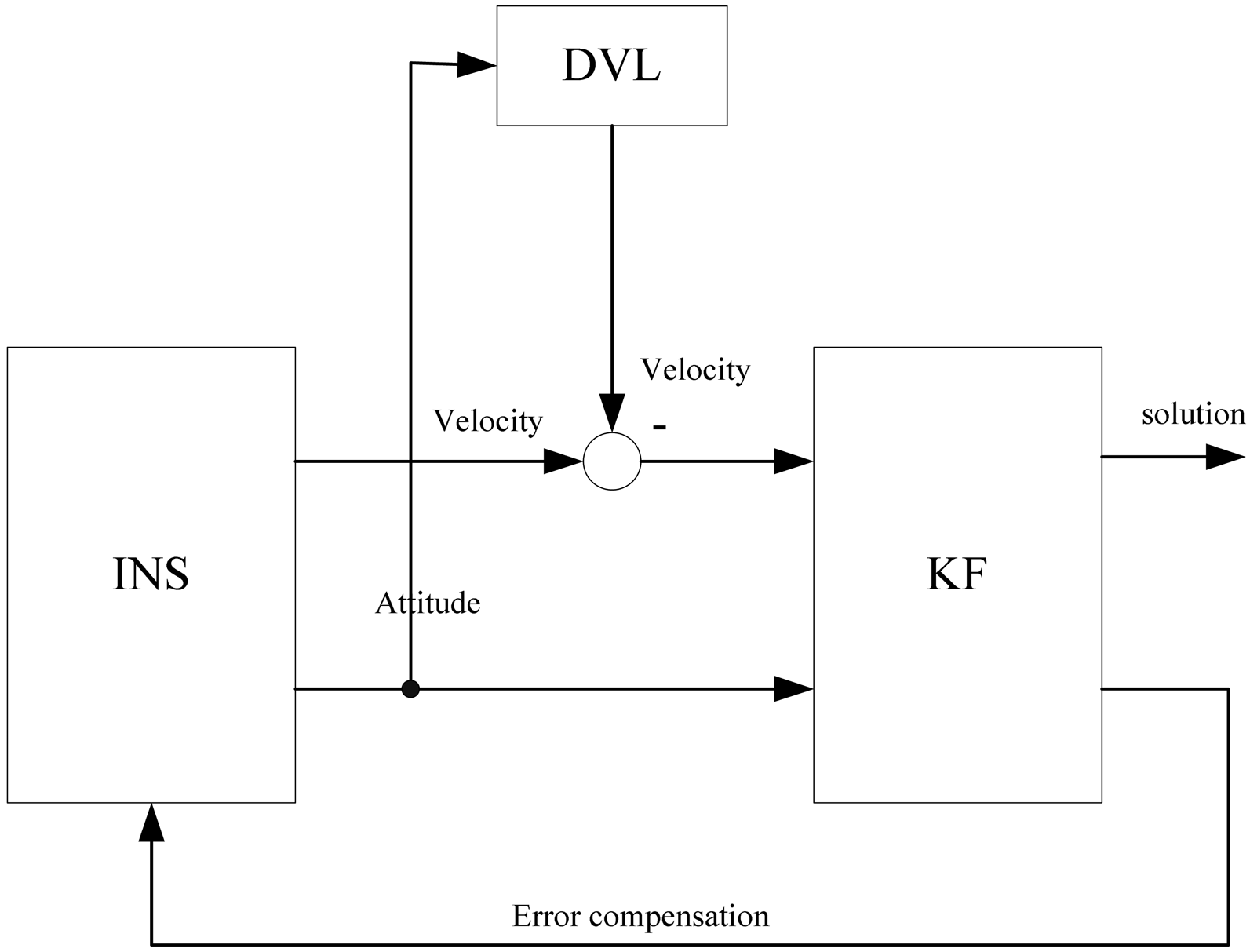
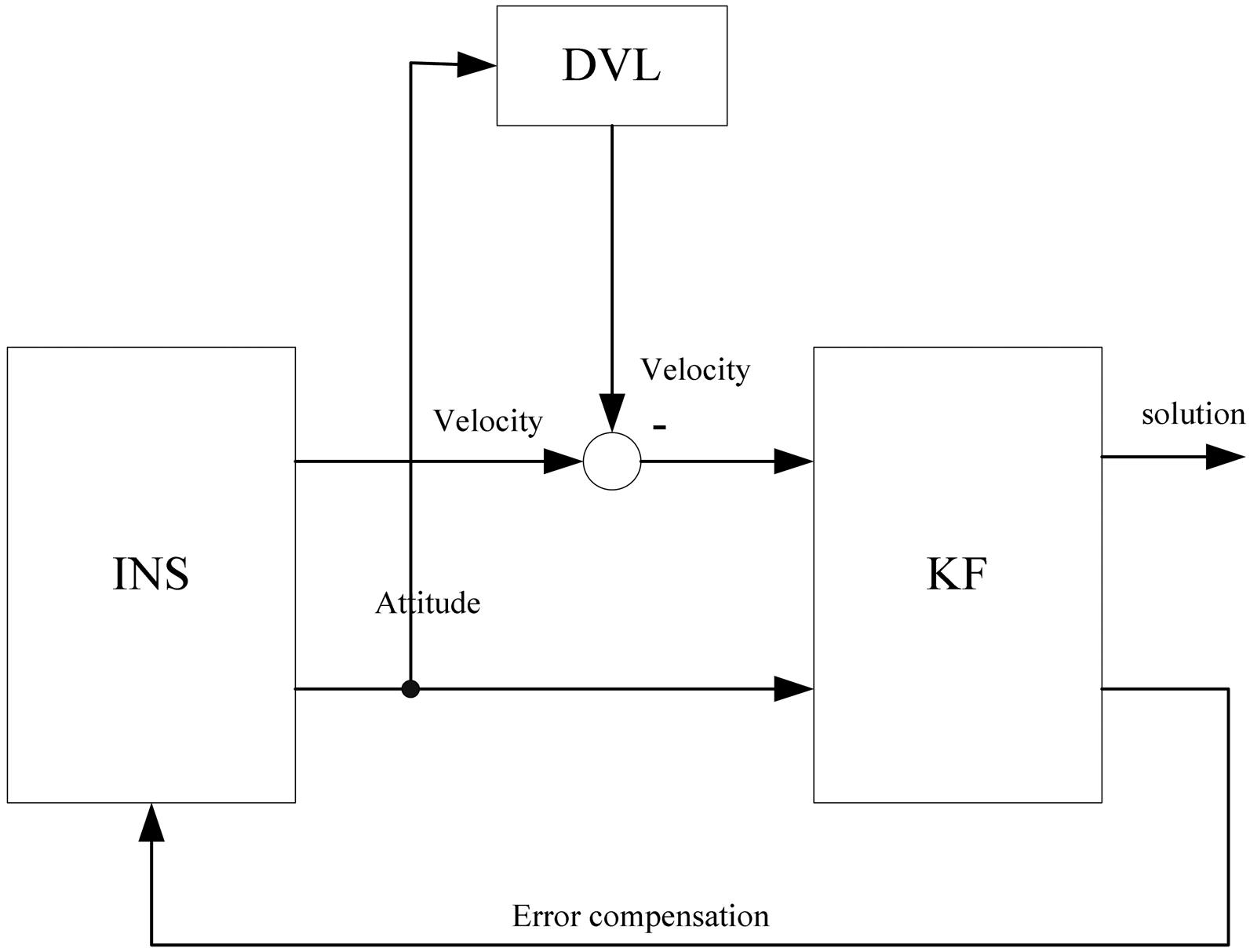
2. Alignment Model
2.1. INS Error Dynamics Model
2.2. Measurement Model
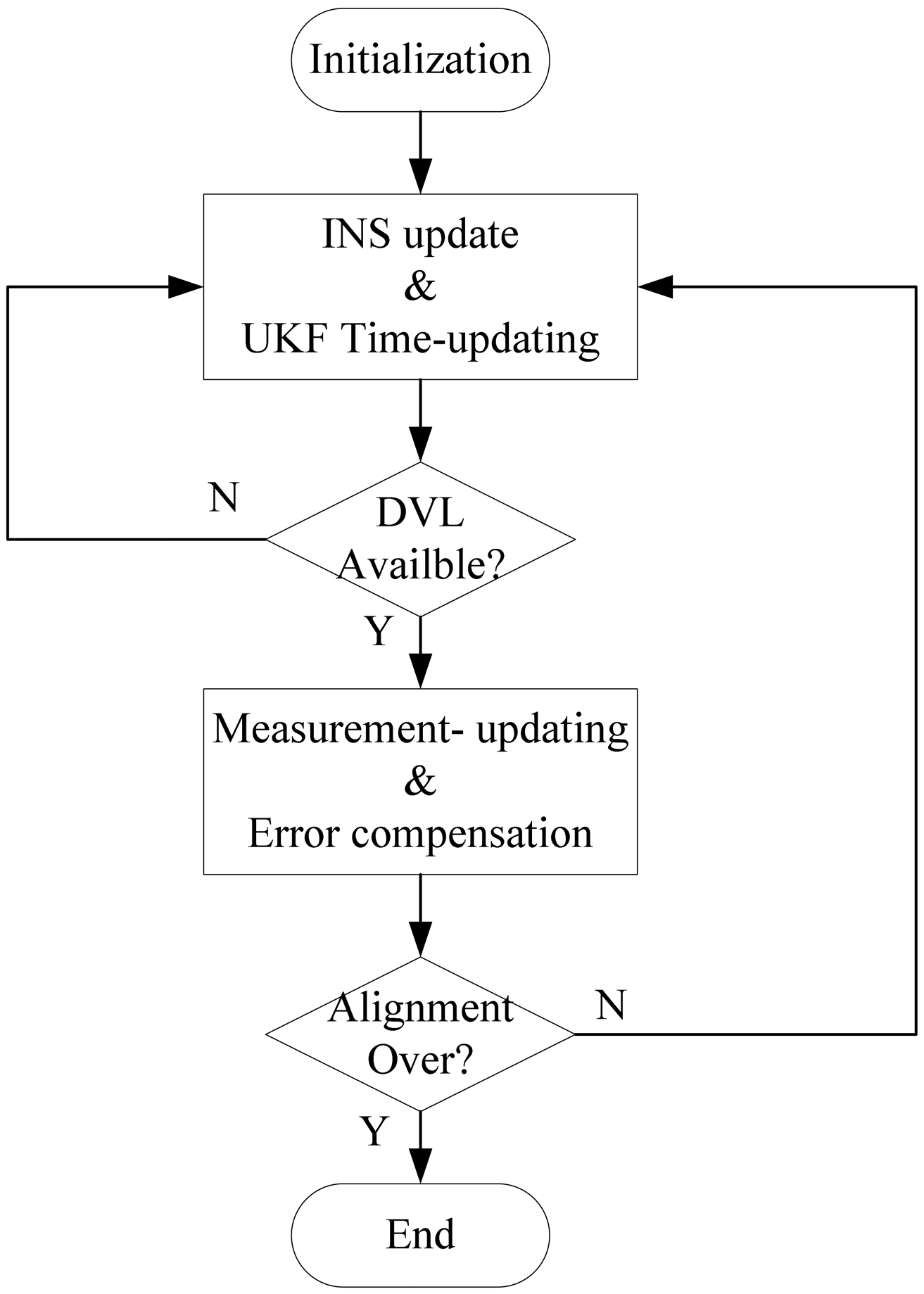
3. UKF Techniques
3.1. UKF in Additive Noise Case
- Initialization:
- Time-updating:
- Measurement-updating:
3.2. Innovation-Based Adaptive UKF
3.3. Residual-Based Adaptive UKF
4. Experimental Results and Discussions
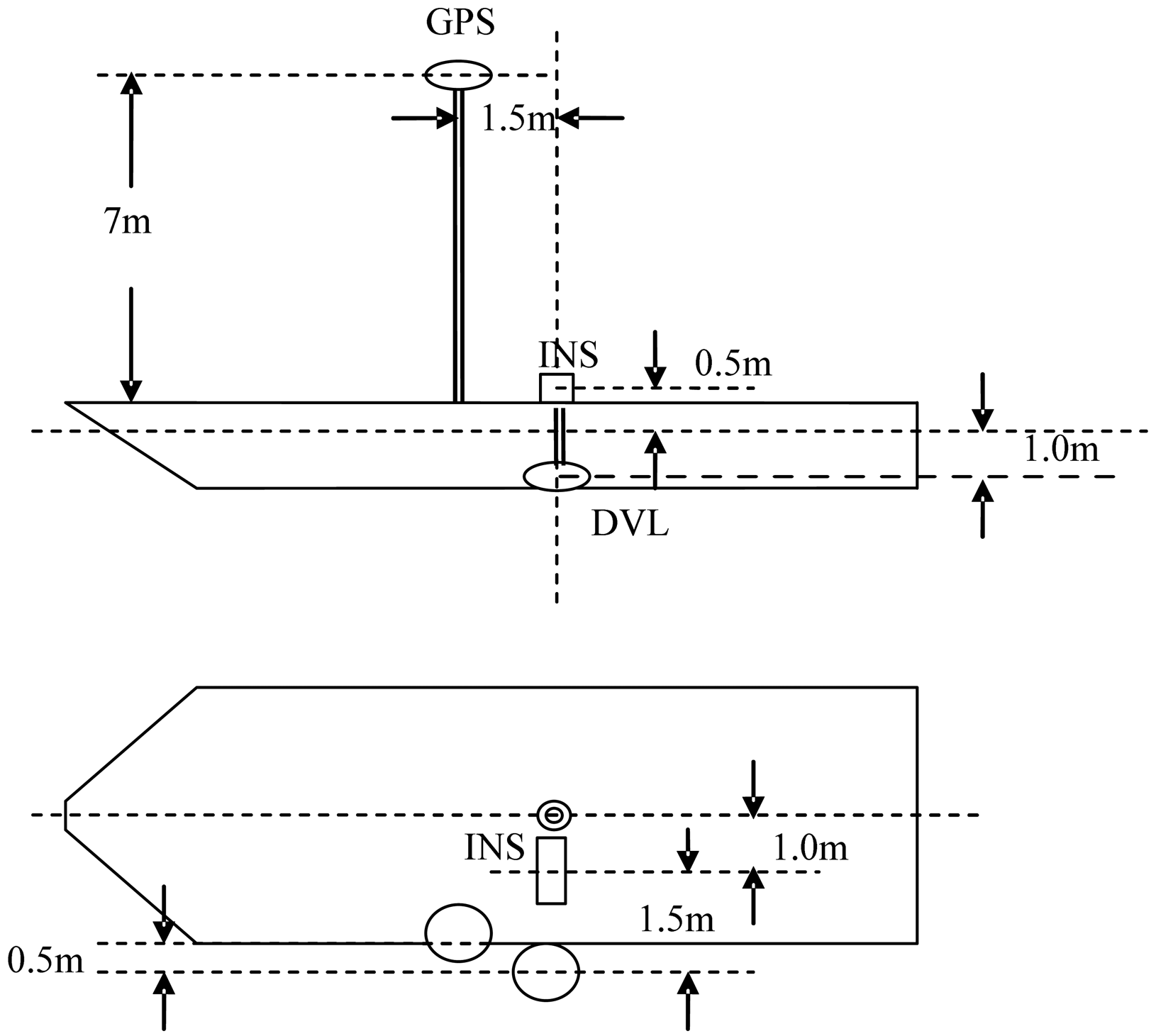
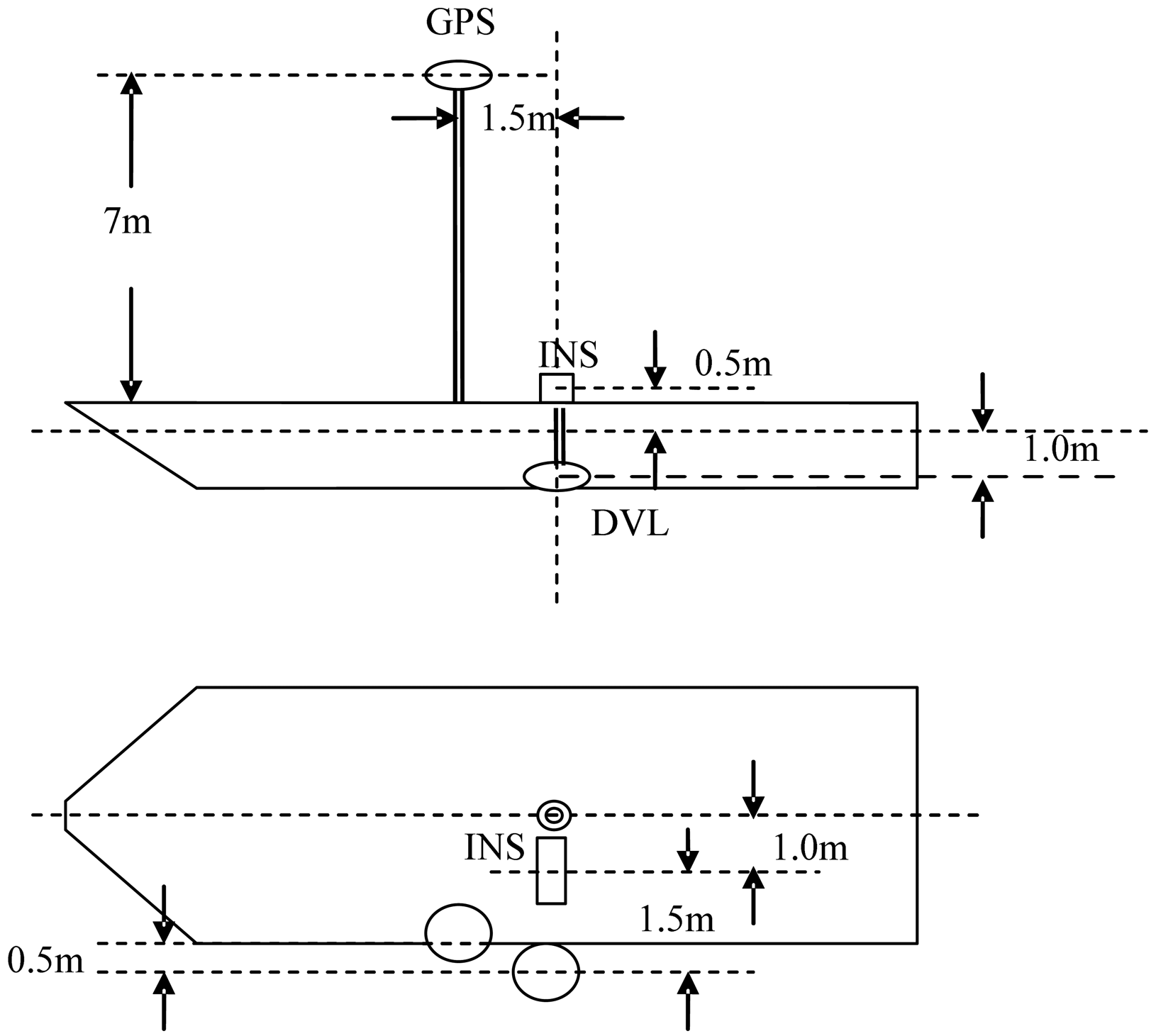
4.1. Test Configuration
- IMU: Consists of three ring laser gyroscopes with drift rate 0.01° / h(1σ) and three quartz accelerometers with bias 5×10−5g(1σ). Its update rate is 200 Hz.
- Bottom-lock Doppler: Provides three-axis transformation velocities with accuracy ±5‰ of speed and update rates up to 1 Hz.
- GPS receiver: Provides velocity with precision of about 0.1m/s, position with precision of about 10 m, and update rates up to 1 Hz.
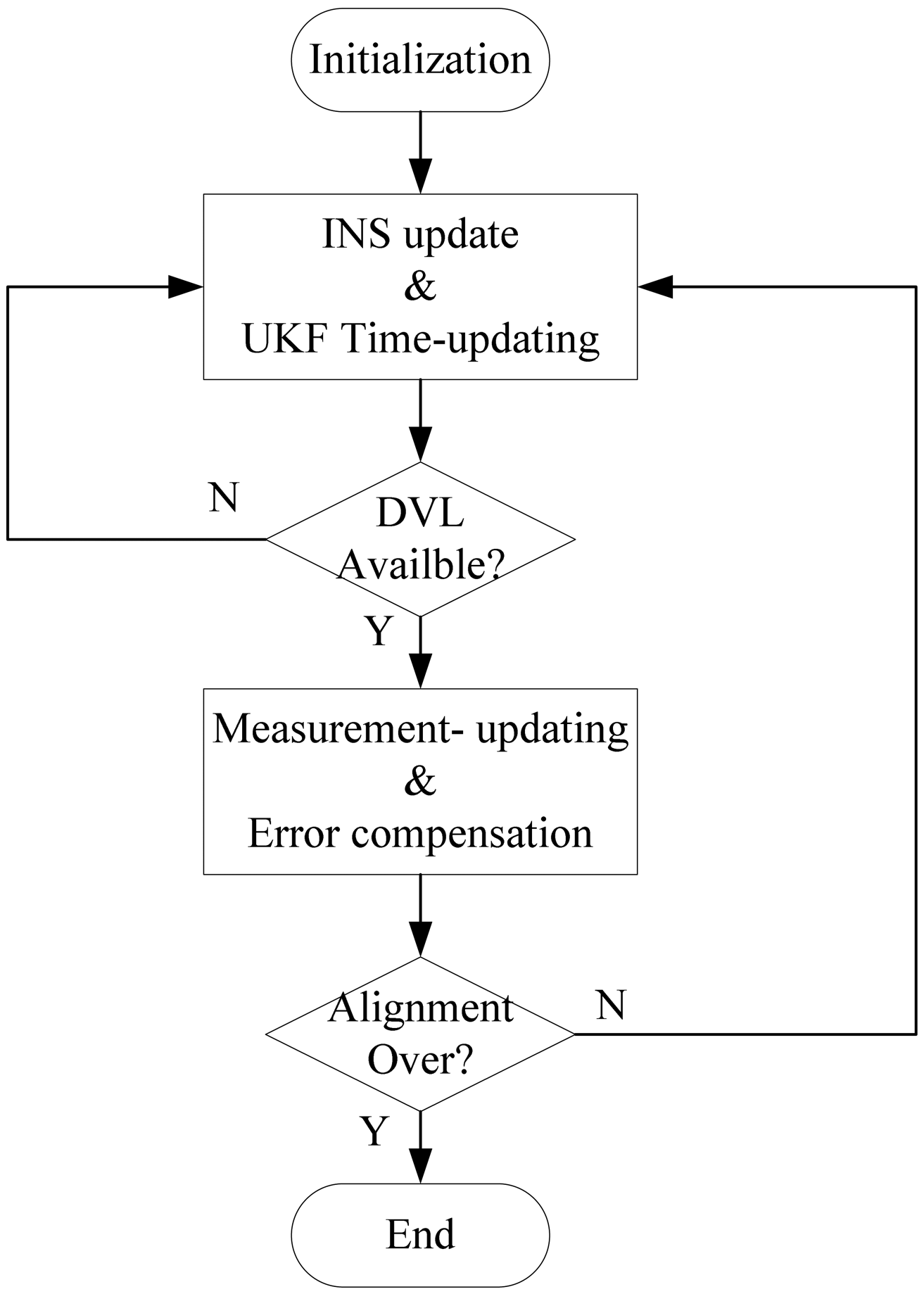
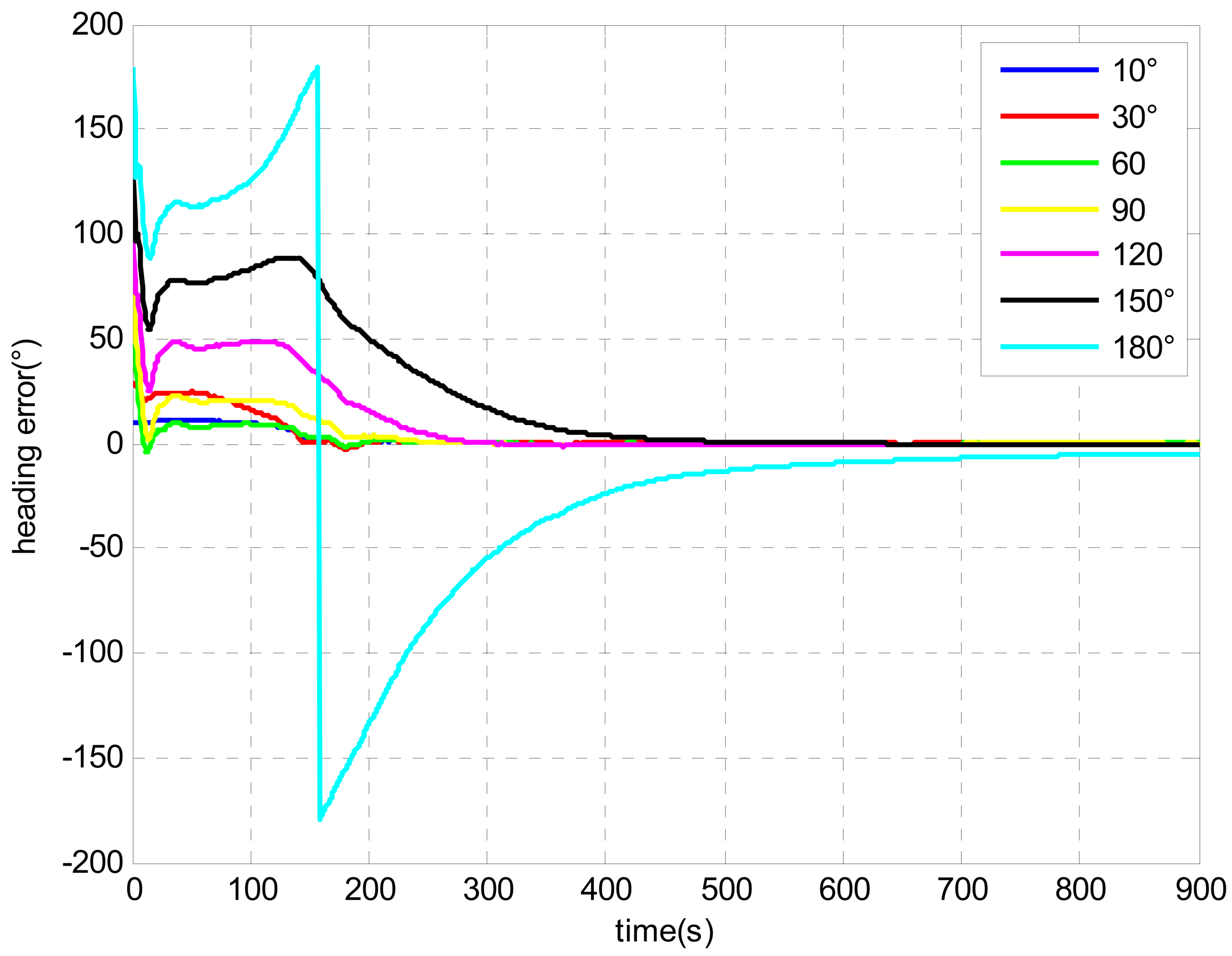
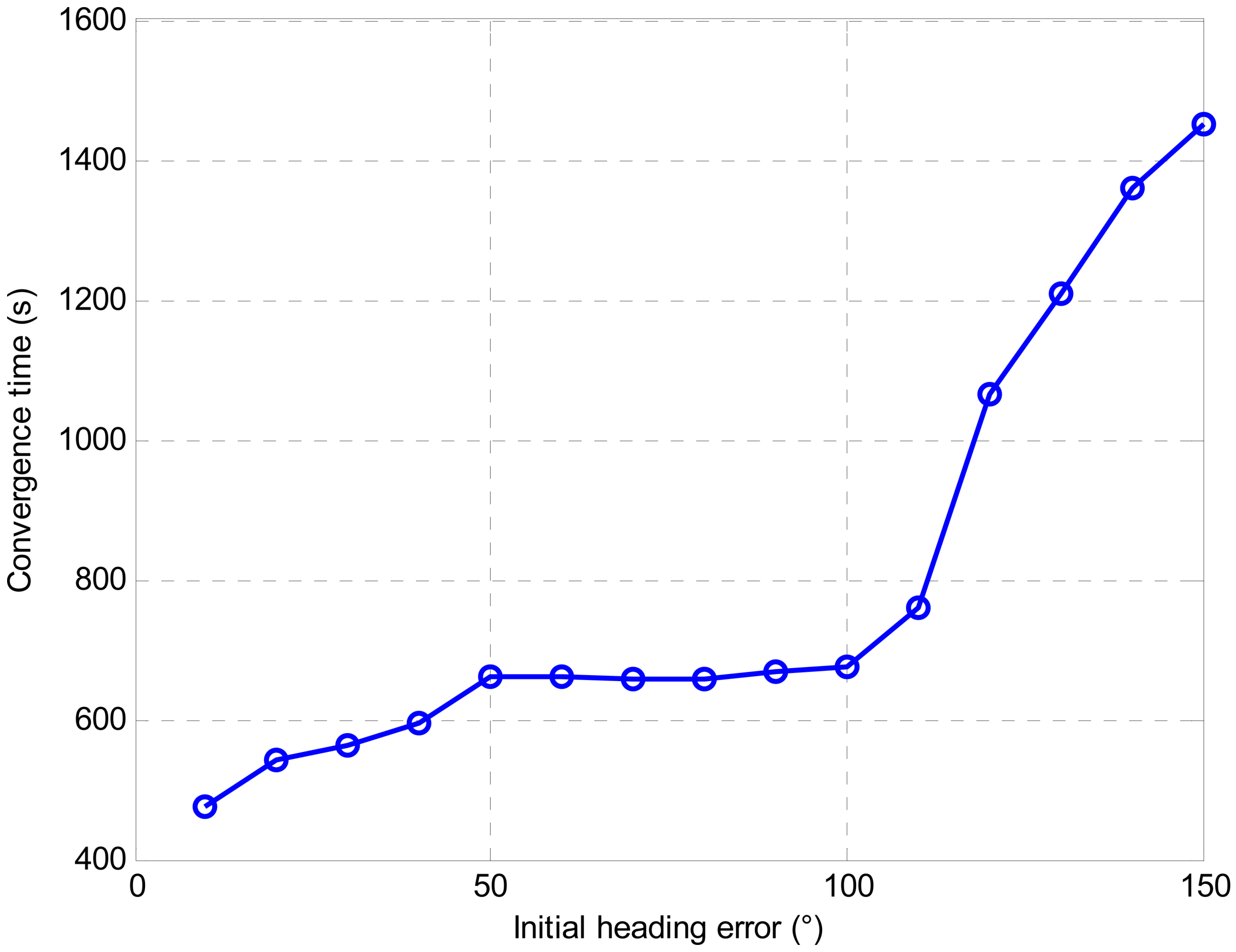
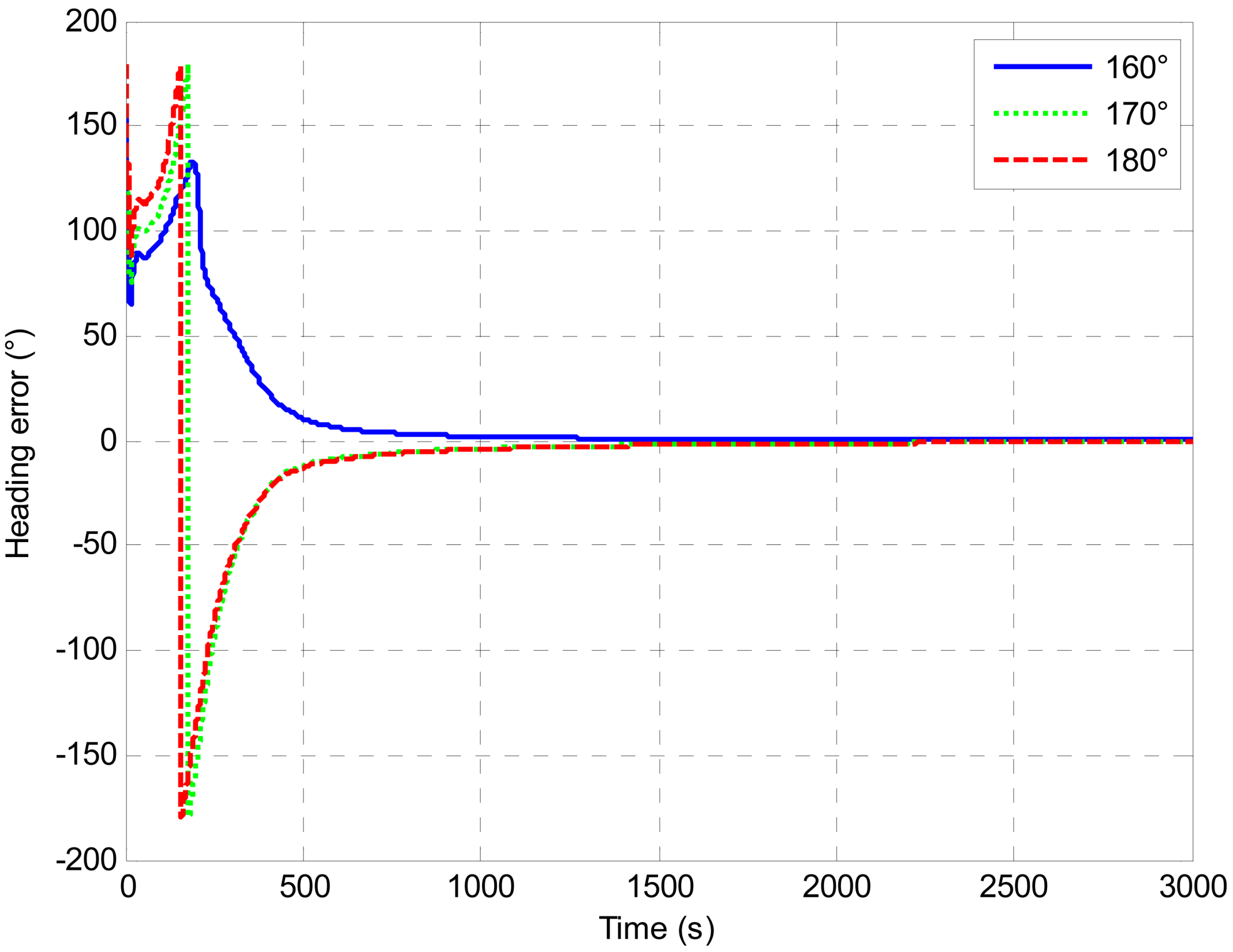
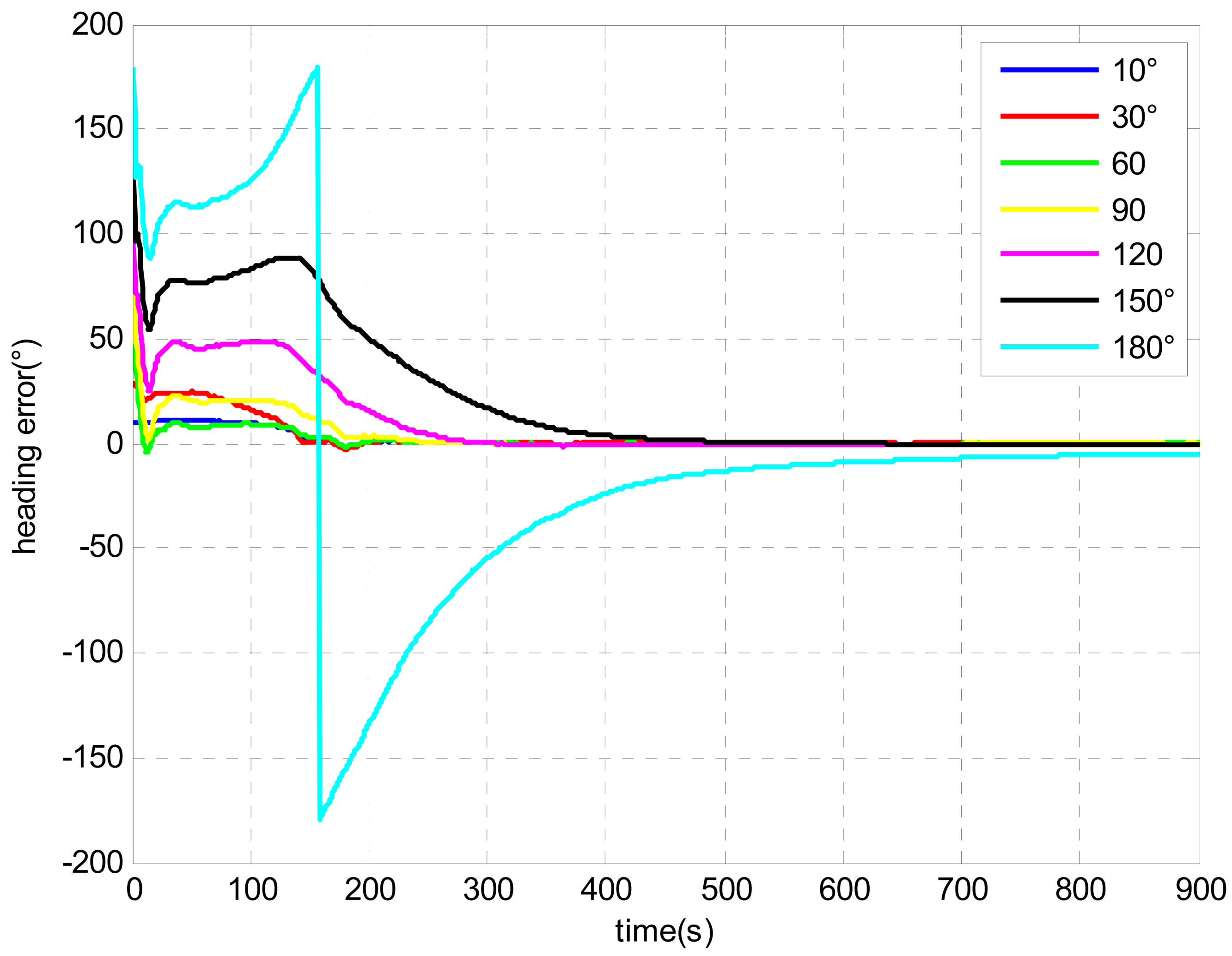
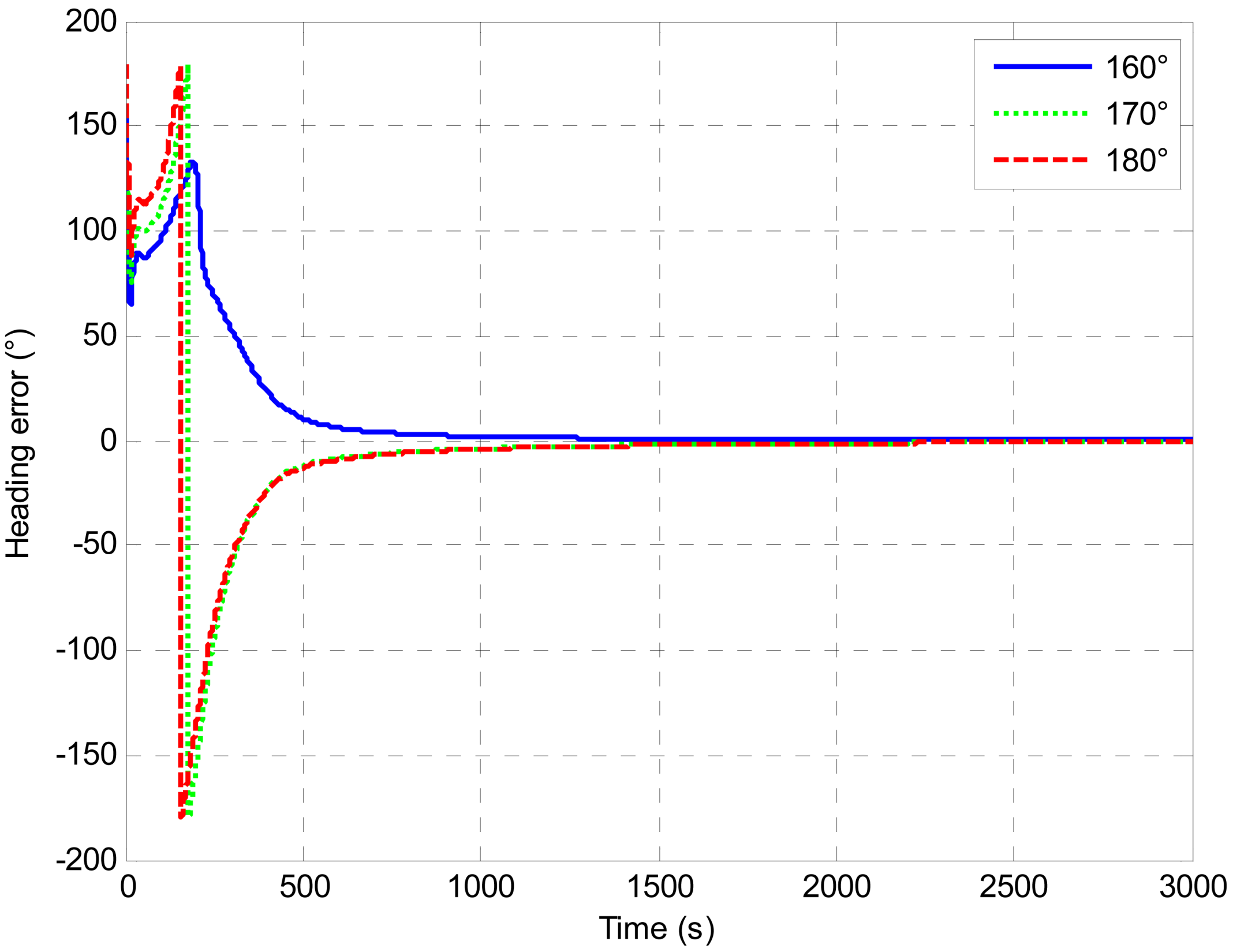
4.2. Alignment Results by UKF
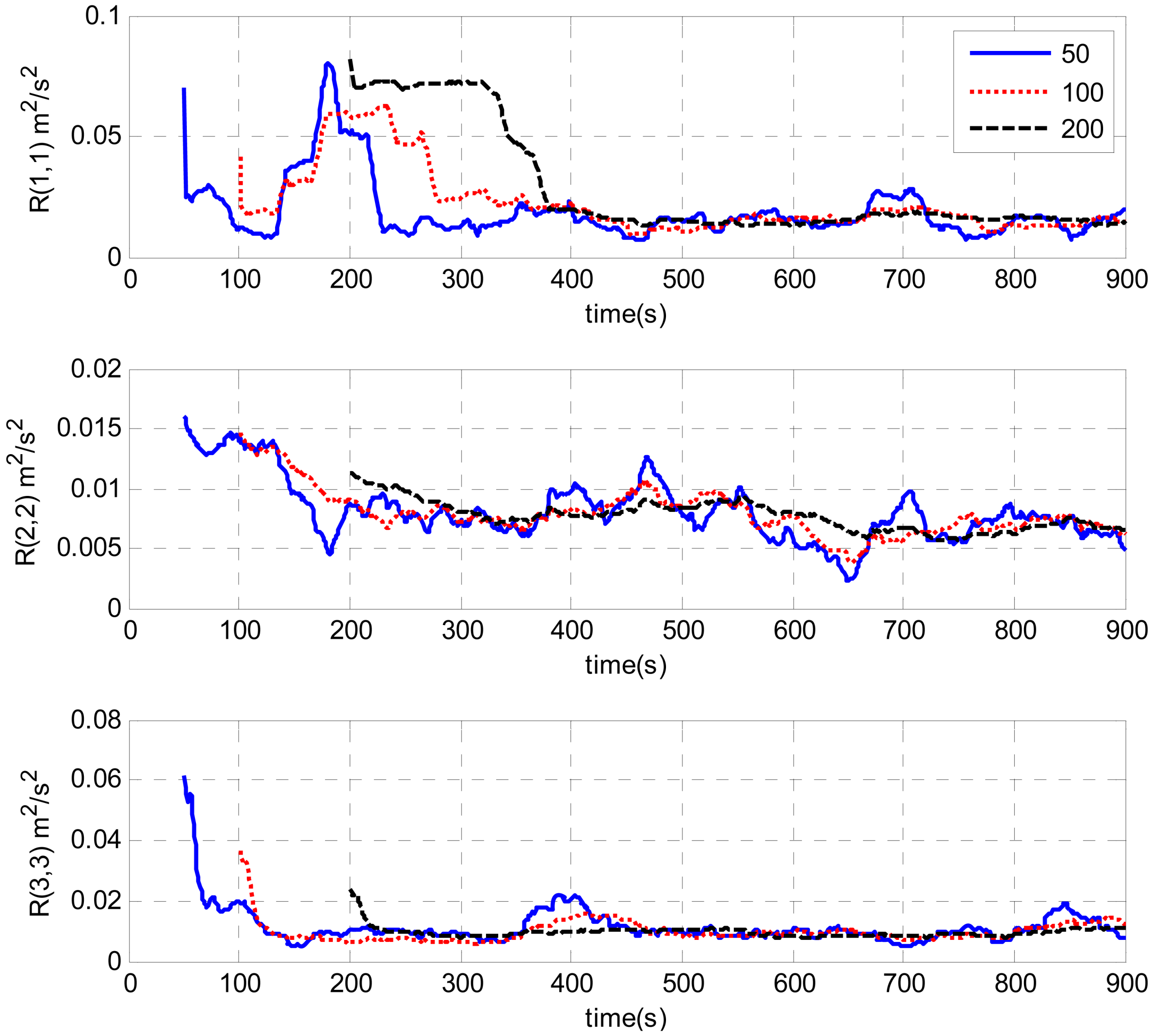
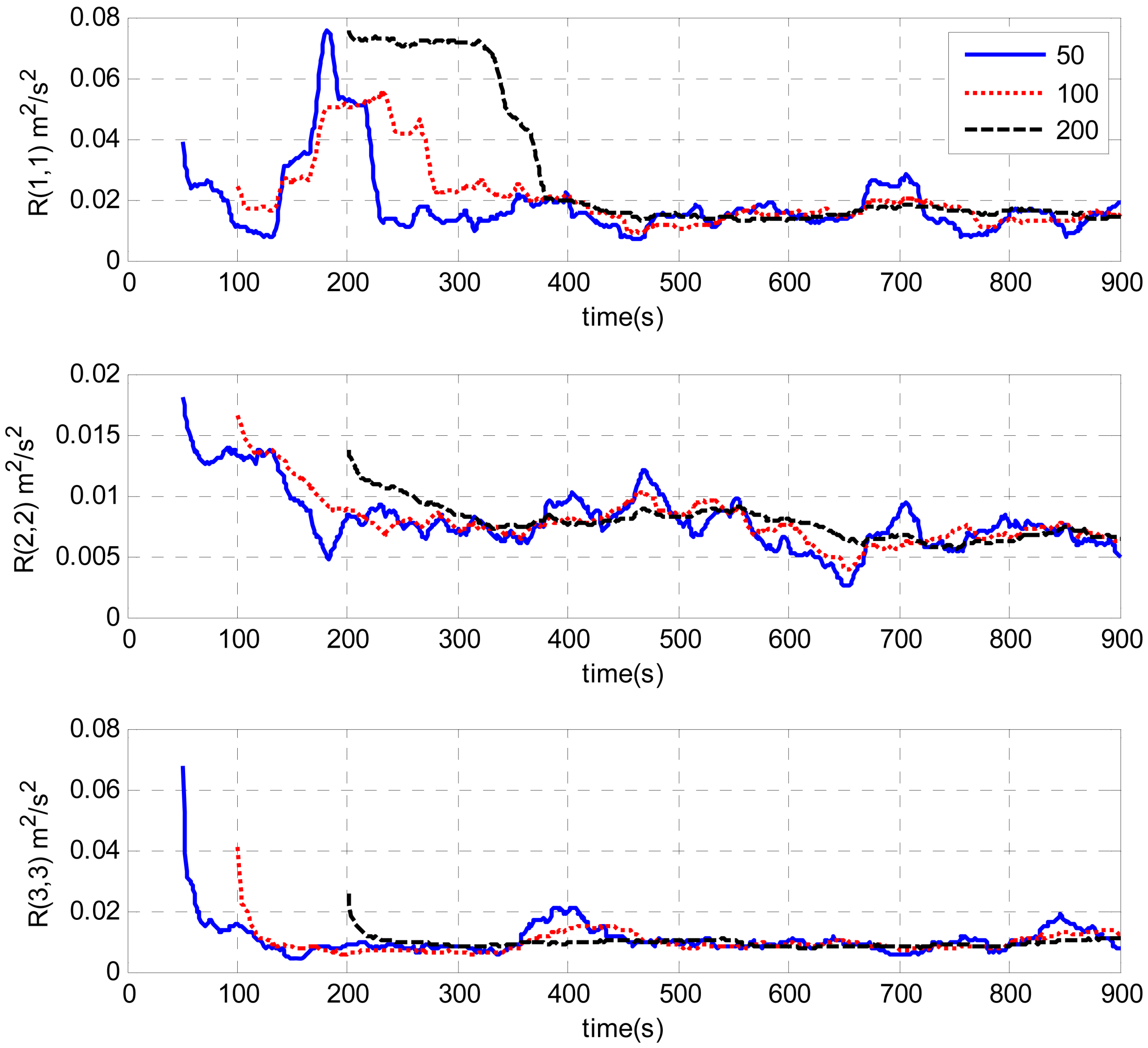
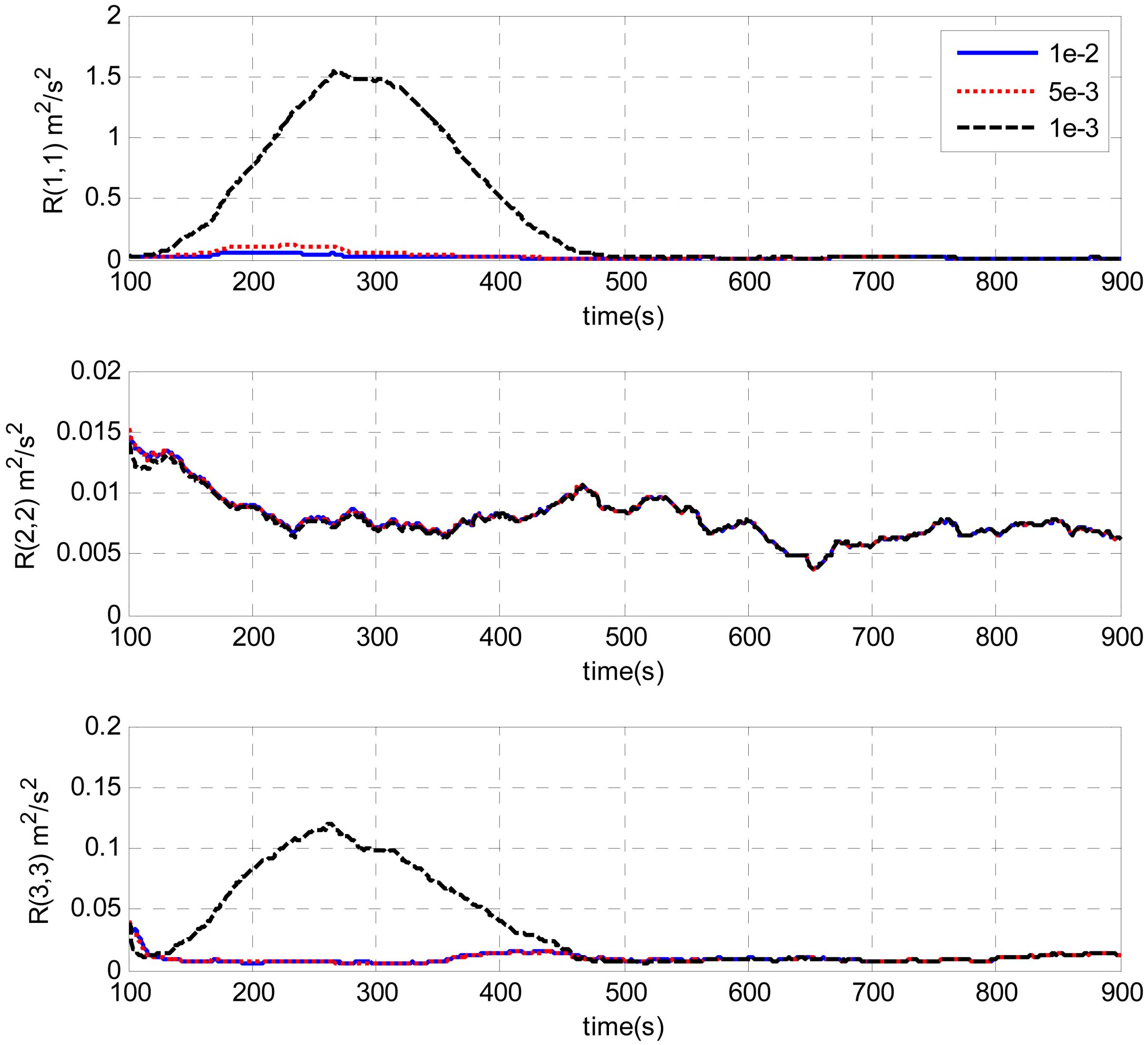
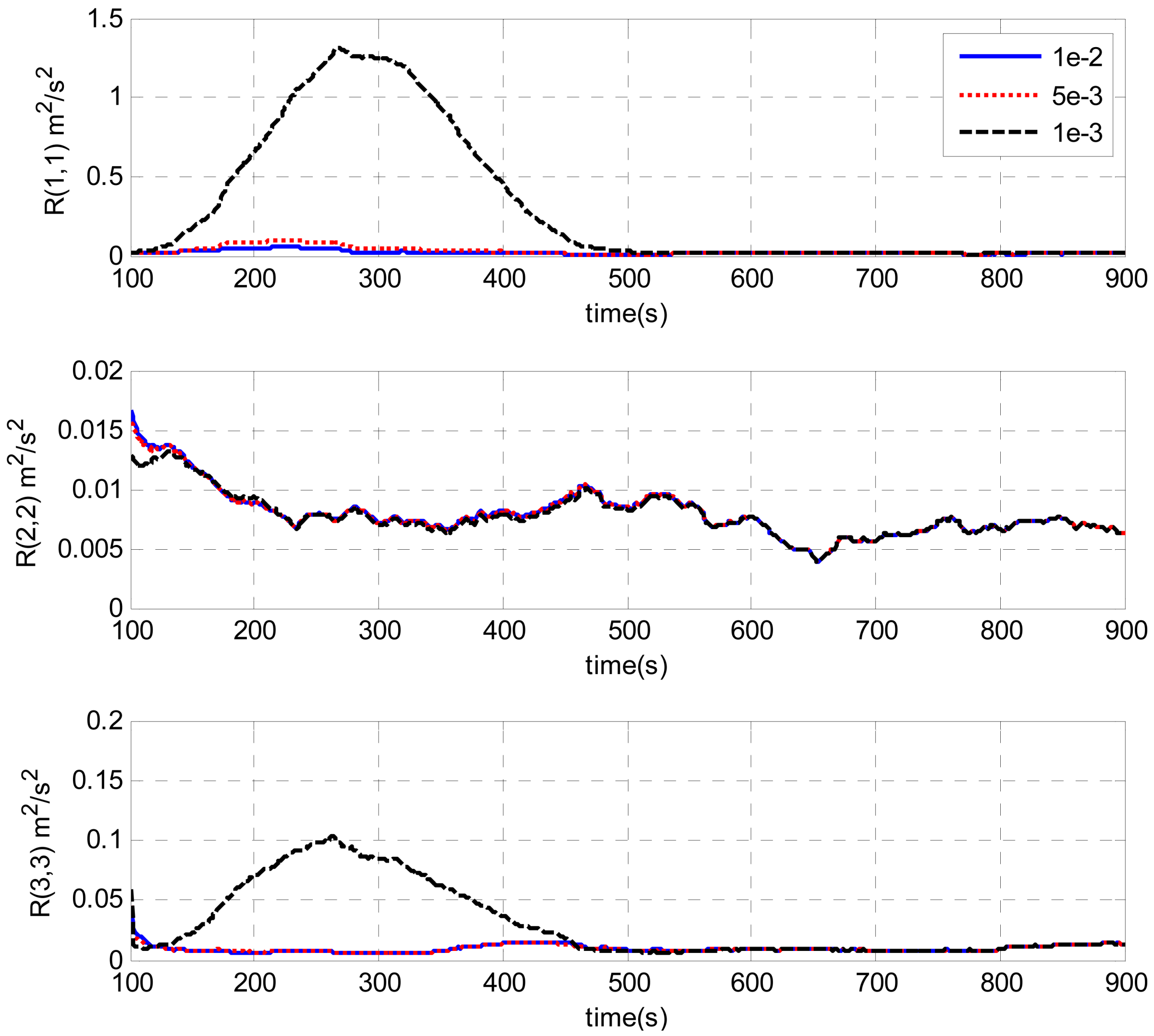
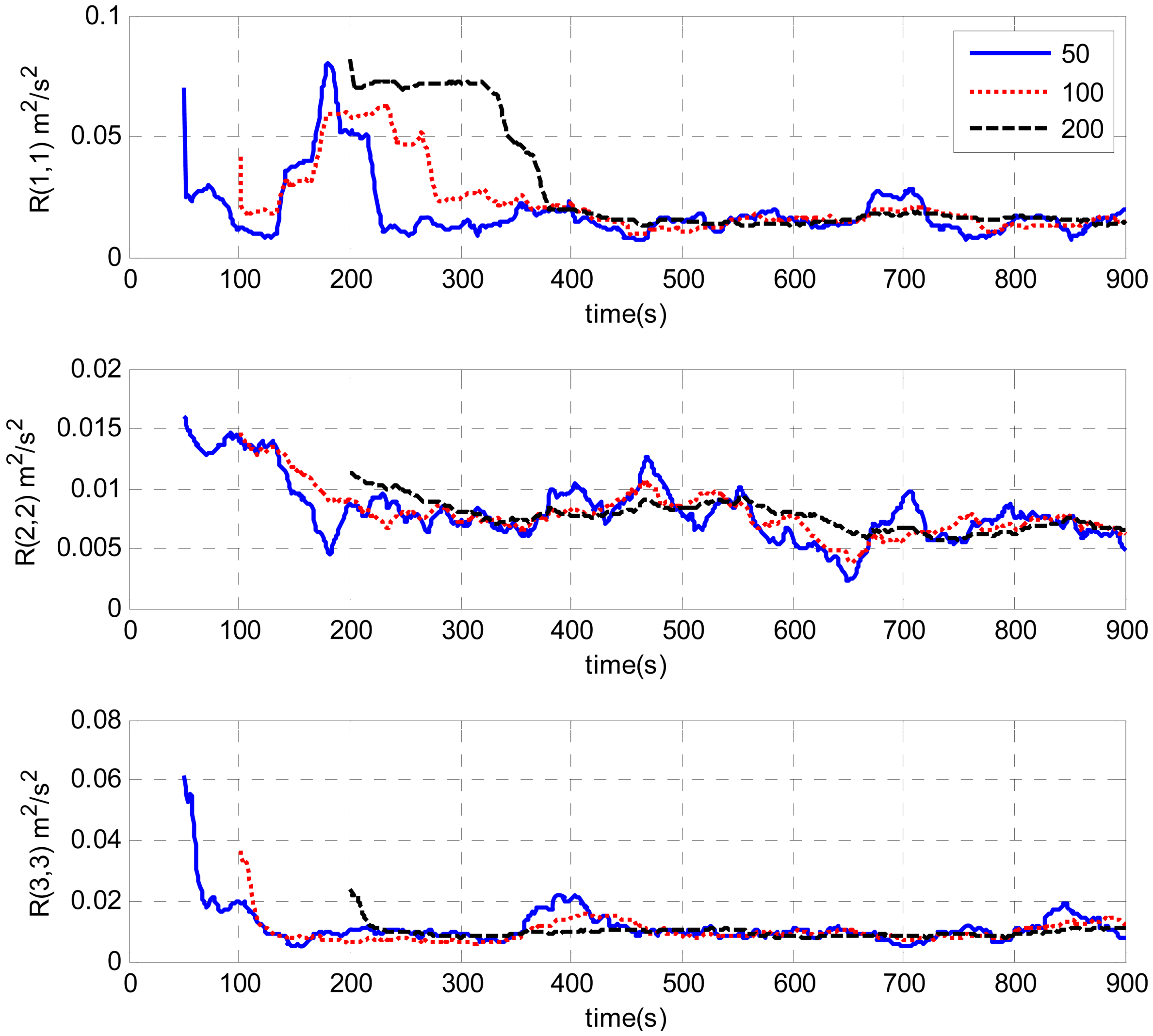
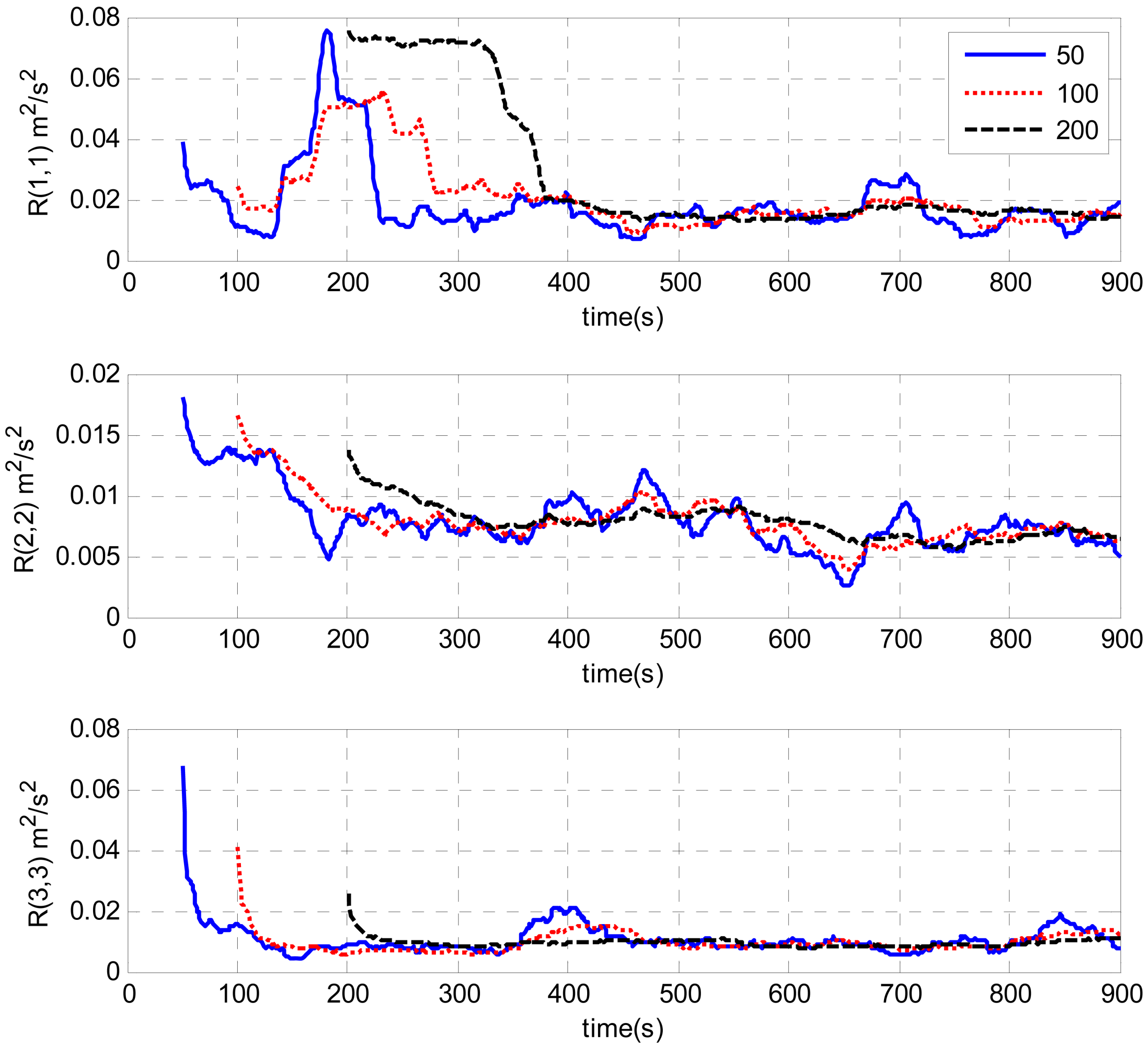
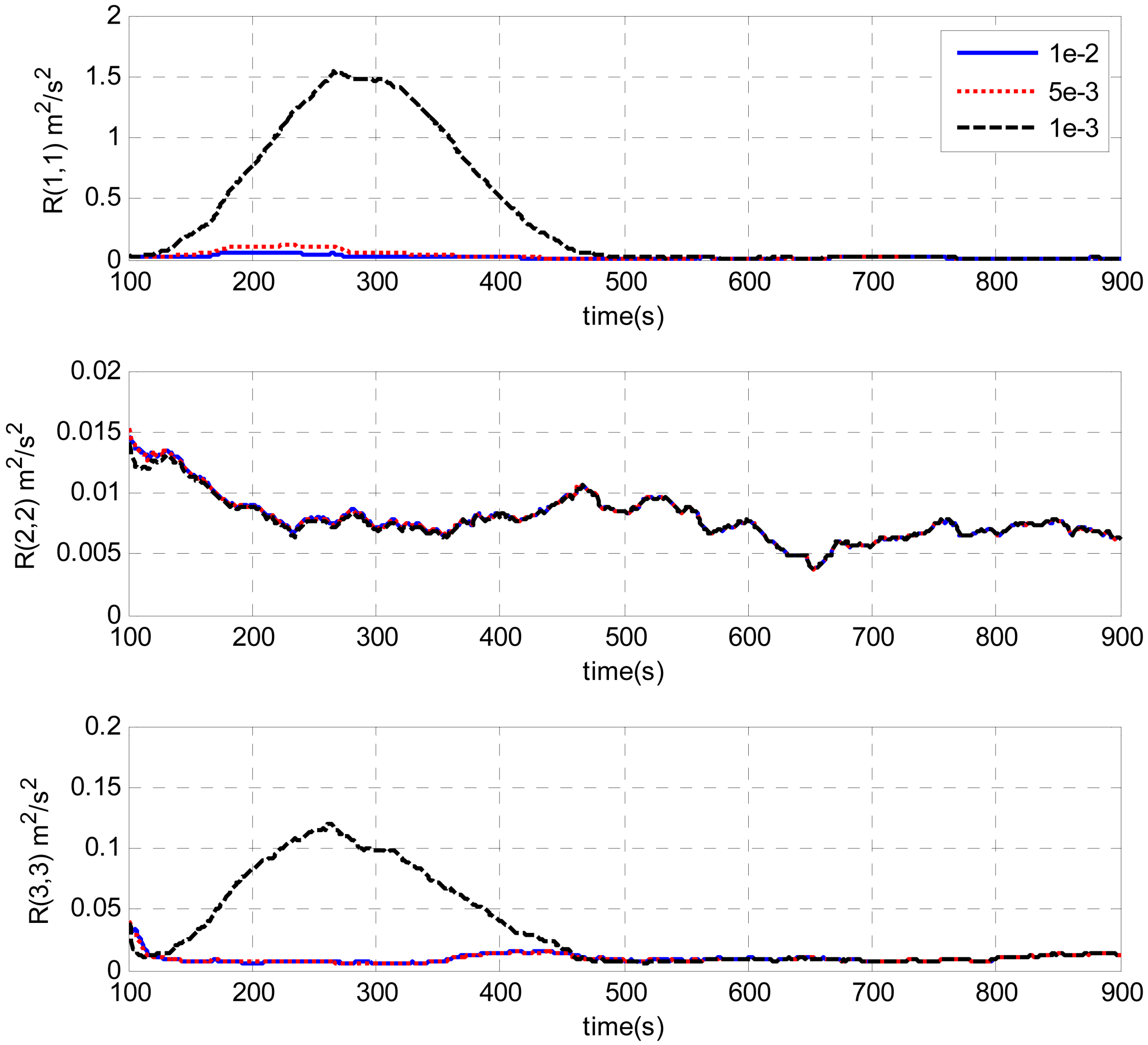
4.3. Measurement Noise Covariance Estimation
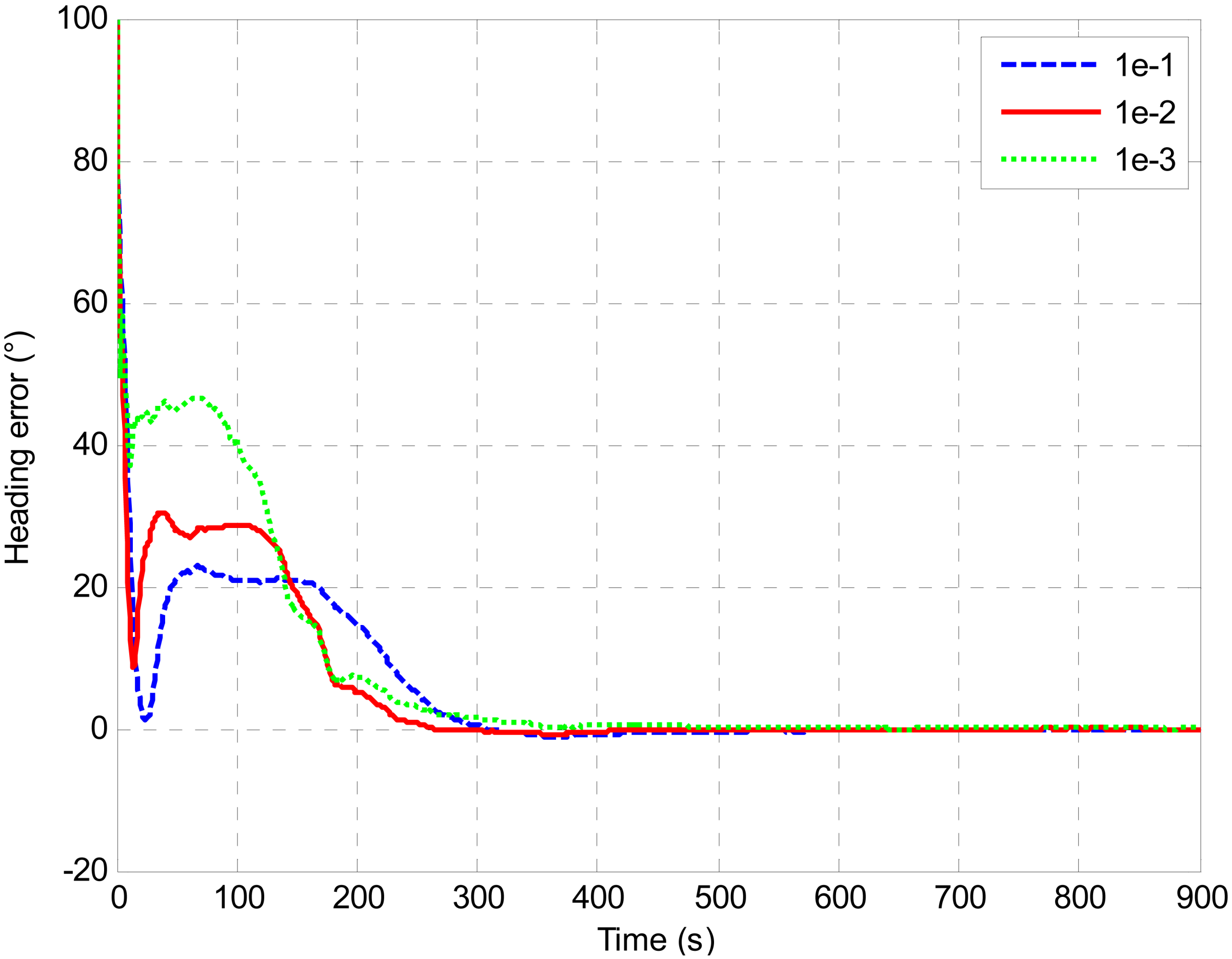
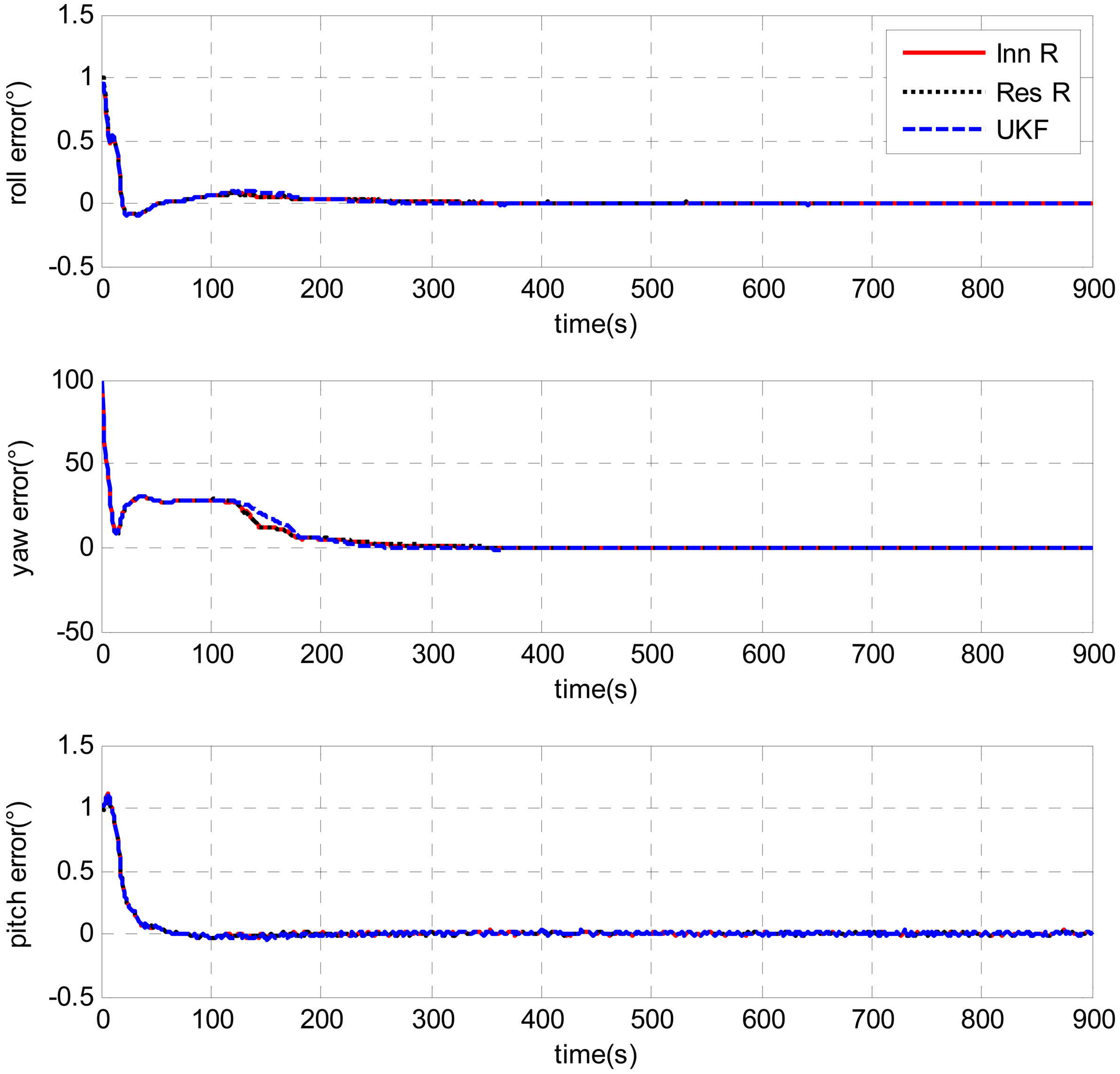
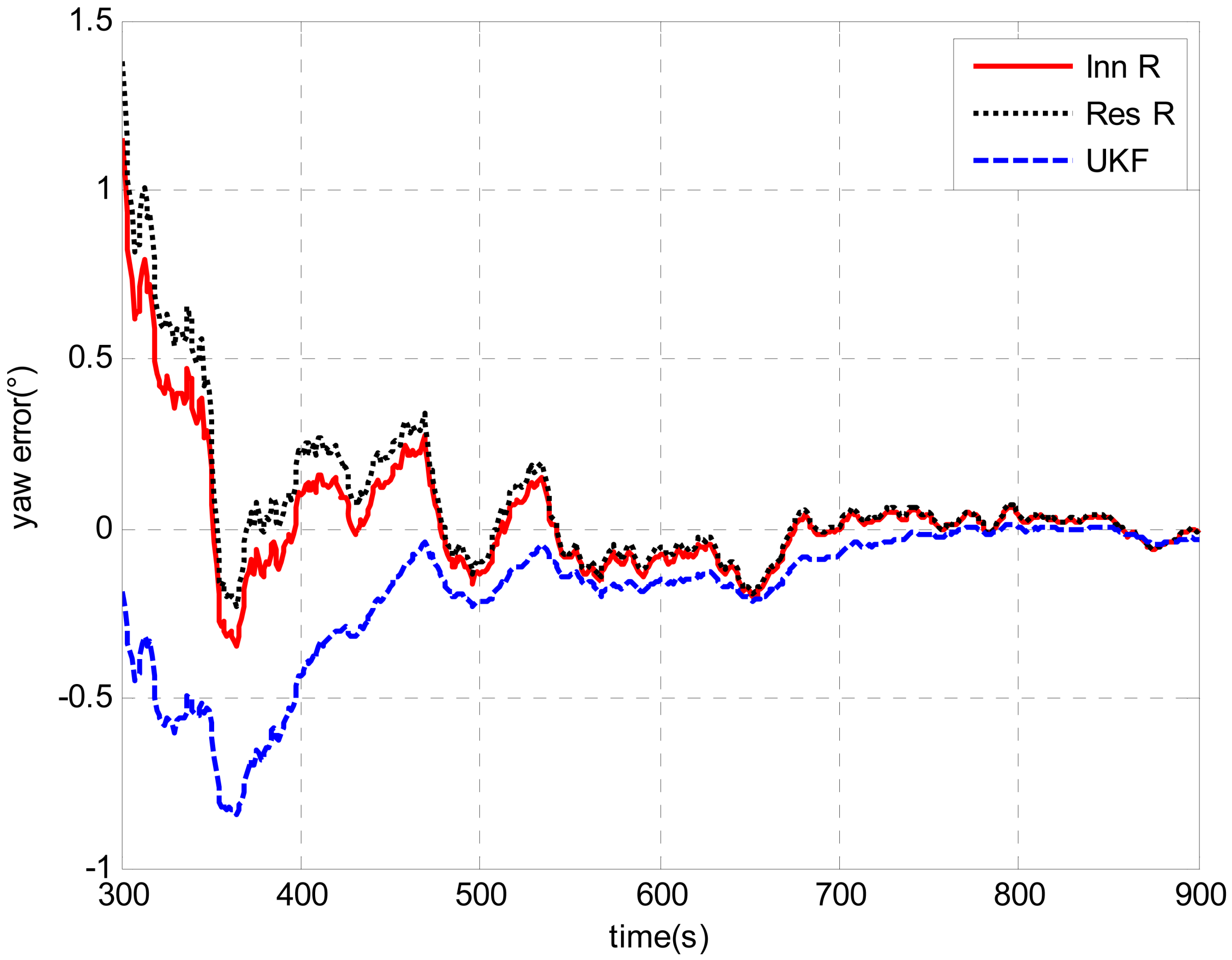
4.4. Performance Evaluation of the Adaptive UKF Techiniques
5. Conclusions
Acknowledgments
References
- Kinsey, J.C.; Eustice, R.; Whitcomb, L.L. A Survey of Underwater Vehicle Navigation: Recent Advances and New Challenges. Proceedings of IFAC Conference on Maneuvering and Control of Marine Craft, Lisbon, Portugal, September 2006.
- Stutters, L.; Liu, H.; Tiltman, C.; Brown, D.J. Navigation technologies for autonomous underwater vehicles. IEEE Trans. Syst. Man Cy. C 2008, 38, 581–589. [Google Scholar]
- Li, W.; Wang, J.; Wu, W.; Lu, L. A fast SINS initial alignment scheme for underwater vehicle applications. J. Navig. 2012. [Google Scholar] [CrossRef]
- Silson, P.M.G. Coarse alignment of a ship's strapdown inertial attitude reference system using velocity loci. IEEE Trans. Instrum. Meas. 2011, 38, 581–589. [Google Scholar]
- Gao, W.; Zhang, X.; Zhao, G.; Ben, Y. A Fine Alignment Method about Doppler-assisted SINS. Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010; pp. 2333–2337.
- Ben, Y.; Zhu, Z.; Li, Q.; Wu, X. DVL Aided Fine Alignment for Marine SINS. Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011; pp. 1630–1635.
- Liu, Y.; Yu, A.; Zhu, J.; Liang, D. Unscented Kalman filtering in the additive noise case. Sci. China Technol. Sc. 2010, 53, 929–941. [Google Scholar]
- Kwangjin, K.; Chan, G. Non-symmetric unscented transformation with application to in-flight alignment. Int. J. Control. Autom. Syst. 2010, 8, 776–781. [Google Scholar]
- Wang, Q.; Li, Y.; Rizos, C.; Li, S. The UKF and CDKF for Low-Cost SDINS/GPS in-Motion Alignment. Proceedings of International Symposium on GPS/GNSS, Yokohama, Japan; 2008; pp. 441–448. [Google Scholar]
- Seo, W.; Hwang, S.; Park, J.; Lee, J. Precise outdoor localization with a GPS–INS integration system. Robotica 2012. [Google Scholar] [CrossRef]
- Shin, E. Estimation Techniques for Low-Cost Inertial Navigation. Ph.D. Thesis, Department of Geomatics Engineering, University of Calgary, Calgary, AB, Canada, May 2005. [Google Scholar]
- Petovello, M.G.; Cannon, M.E.; Lachapelle, G. Kalman Filter Reliability Analysis Using Different Update Strategies. Proceedings of the CASI Annual General Meeting, Montreal, QC, Canada, 28–30 April 2003.
- Shin, E. Accuracy Improvement of Low Cost INS/GPS for Land Application. M.Sc. Thesis, Department of Geomatics Engineering, University of Calgary, Calgary, AB, Canada, December 2001. [Google Scholar]
- Angrisano, A.; Petovello, M.; Pugliano, G. Benefits of combined GPS/GLONASS with low-cost MEMS IMUs for vehicular urban navigation. Sensors 2012, 12, 5134–5158. [Google Scholar]
- Zhang, S. An Adaptive Unscented Kalman filter for Dead Reckoning Systems. Proceedings of International conference on Information Engineering and Computer Science, Beijing, China, 19–20 December 2009; pp. 1–4.
- Ding, W.; Wang, J.; Rizos, C. Improving adaptive Kalman estimation in GPS/INS integration. J. Navig. 2007, 60, 517–529. [Google Scholar]
- Qu, C.; Xu, H.; Tan, Y. SINS/CNS integrated navigation solution using adaptive unscented Kalman filtering. Int. J. Comput. Appl. Technol. 2011, 41, 109–116. [Google Scholar]
- Wang, J. Stochastic modeling for RTK GPS/Glonass positioning. J. Inst. Navig. 2000, 46, 297–305. [Google Scholar]
- Fang, J.; Yang, S. Study on innovation adaptive EKF for in-flight Alignment of airborne POS. IEEE Trans. Instrum. Meas. 2011, 60, 1378–1388. [Google Scholar]
- Kong, X.; Nebot, E.M.; Durrant-Whyte, H. Development of a Non-Linear Psi-Angle Model for Large Misalignment Errors and its Application in INS Alignment and Calibration. Proceedings of the 1999 IEEE International Conference on Robotics and Automation, Detroit, MI, USA, May 1999; pp. 1430–1435.
- Kinsey, J.C.; Whitcomb, L.L. Adaptive identification on the group of rigid-body rotations and its application to underwater vehicle navigation. IEEE Trans. Robot. 2007, 23, 124–136. [Google Scholar]
- Han, S.; Wang, J. A novel initial alignment scheme for low-cost INS aided by GPS for land vehicle application. J. Navig. 2010, 63, 663–680. [Google Scholar]
- Xiong, K.; Zhang, H.; Chan, C. Performance evaluation of UKF-based nonlinear filtering. Automatica. 2006, 42, 261–270. [Google Scholar]
- Wu, Y.; Wu, M.; Hu, D.; Hu, X. Unscented Kalman filtering for additive noise case: augmented versus non-augmented. IEEE. Signal Proc. Lett. 2005, 12, 357–360. [Google Scholar]
- Van, R. Sigma-Point Kalman Filters for Probabilistic Inference in Dynamic State-Space Models. Ph.D. Thesis, Oregon Health & Science University, Portland, April 2004. [Google Scholar]
- Yan, G.; Yan, W.; Xv, D. Application of simplified UKF in SINS initial alignment for large misalignment angles. J. Chin. Inert. Technol. 2008, 16, 253–264. [Google Scholar]
- Xu, J.; Jing, Y.; Dimirovski, G.; Ban, Y. Two-Stage Unscented Kalman Filter for Nonlinear Systems in the Presence of Unknown Random Bias. Proceeding of American Control Conference, Seattle, Washington USA, 11–13 June 2008; pp. 3530–3535.
- Wan, E.A.; Van, R. The Unscented Kalman Filter for Nonlinear Estimation. Proceeding of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium, Lake Louise, AB, Canada, 1–4 October 2000; pp. 153–158.
- Almagbile, A.; Wang, J.; Ding, W. Evaluating the performance of adaptive Kalman filter methods in GPS/INS integration. CPGPS 2010, 9, 33–40. [Google Scholar]
- Yang, Y.; Gao, W. An optimal adaptive Kalman filter. J. Geodesy. 2006, 80, 177–183. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| R Value (m2/s2) | Heading Accuracy (°) | Convergence Time (s) |
|---|---|---|
| 1e-1 | 0.0629 | 766 |
| 1e-2 | 0.0282 | 676 |
| 1e-3 | 0.0367 | 800 |
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Li, W.; Wang, J.; Lu, L.; Wu, W. A Novel Scheme for DVL-Aided SINS In-Motion Alignment Using UKF Techniques. Sensors 2013, 13, 1046-1063. https://doi.org/10.3390/s130101046
Li W, Wang J, Lu L, Wu W. A Novel Scheme for DVL-Aided SINS In-Motion Alignment Using UKF Techniques. Sensors. 2013; 13(1):1046-1063. https://doi.org/10.3390/s130101046
Chicago/Turabian StyleLi, Wanli, Jinling Wang, Liangqing Lu, and Wenqi Wu. 2013. "A Novel Scheme for DVL-Aided SINS In-Motion Alignment Using UKF Techniques" Sensors 13, no. 1: 1046-1063. https://doi.org/10.3390/s130101046