Optimal Sensor Arrangements in Angle of Arrival (AoA) and Range Based Localization with Linear Sensor Arrays

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
: This paper investigates the linear separation requirements for Angle-of-Arrival (AoA) and range sensors, in order to achieve the optimal performance in estimating the position of a target from multiple and typically noisy sensor measurements. We analyse the sensor-target geometry in terms of the Cramer–Rao inequality and the corresponding Fisher information matrix, in order to characterize localization performance with respect to the linear spatial distribution of sensors. Here in this paper, we consider both fixed and adjustable linear sensor arrays.1. Introduction
Different techniques can be used to localize an emitting or non-emitting target [1–4]. AoA and range-based localizations are common passive measurement techniques where the location of an emitter is obtained by triangulation of bearing or range information collected at a number of sensors. These techniques have numerous potential applications in radar, unmanned aerial vehicles (UAVs) and mobile positioning in wireless telecommunication systems.
The Stansfield estimator in [5] is considered as one of the first localization methods. It is a weighted least-squares (LS) estimator that assumes small independent Gaussian distributed bearing noise with no sensor location error. The pseudolinear estimator (PLE) introduced in [6] relaxed the prior knowledge requirement of the emitter range by the Stansfield estimator. For Gaussian distributed bearing noise, the passive emitter localization problem can be converted into a nonlinear LS estimation problem by engaging the maximum likelihood approach. In [7] the nonlinear LS problem was linearized by Taylor series expansion resulting an iterative Gauss–Newton algorithm.
The potential performance of any particular localization algorithm is highly dependent on the relative sensor-target geometry [6,8]. This performance is determined by the geometry of the physical aperture or array as well as the weighting that can be applied to measurements [9]. A partial characterization of the sensor-target geometry with various matrices related to Cramer–Rao inequality or the corresponding Fisher information matrix has been explored in [10]. Since the Cramer–Rao lower bound is a function of the relative sensor-target geometry, a number of authors have attempted to identify underlying geometrical configurations that minimize some measure of this variance lower bound in [6,10–17]. In [12] the problem of moving the sensors in order to track moving targets while maintaining an optimal localization geometry is examined. Indeed, for mobile sensor-based localization problems, a similar measure of localization performance can be used to identify optimal sensor trajectories and to derive control laws for navigating sensors along such trajectories [2,6,12,14,15,18–20]. Localization of targets via AoA sensors are currently being studied in many robotic applications [21,22]. A modulo conversion method to finding phase ambiguity and consequently estimating the AoA of an electromagnetic wave incident on a multi-element interferometer with non-uniform spacings is presented in [23]. Furthermore, some array design formulas are given in [24].
Determining the optimal trajectory for a single moving platform with an AoA sensor was explored in [25]. In this approach, the optimal trajectory was determined by maximizing the determinant of the Fisher Information Matrix (FIM), which minimizes the uncertainty of the overall estimation. In this work it is assumed that the estimation algorithm is nearly efficient, because its error covariance matrix is close to the Cramer–Rao Lower Bound (CRLB) [26]. Deriving and dealing with actual Mean Squared Error (MSE) expressions for AoA/range localization methods can be challenging due to the nonlinear nature of the estimation problem. Hence FIM can be used to simplify the analysis to a greater extent [11,13].
Most of the existing literature concerned on the placement of AoA/range sensors around the target for optimal localization [11,13], but linear sensor arrays play a crucial role in some real world applications [8,27–38]. A new array geometry, which is capable of significantly increasing the degrees of freedom of linear arrays, is introduced in [39].
In this paper we provide a more rigorous characterization of the relative sensor-target geometry for linear sensor arrays based on AoA-only and range-only localization, and to the best of our knowledge, no such analysis exists in the literature.
In our approach we consider the localization problem involving a single target and multiple adjustable AoA/range sensors located as a linear array (uniform and non-uniform). In this case, the Cramer–Rao lower bound with the corresponding Fisher information determinant is used to investigate the optimality of the relative sensor-target geometry, exploring the intrinsic relation with the spatial diversity and the underlying measurement model.
The remainder of this paper is organized as follows. In Section 2, an outline of some notations and conventions together with the problem formulation for AoA-only and range-only localization is given. Section 3 provides results for optimality of the localization for linear sensor arrays that utilise the AoA sensor measurements, while Section 4 gives the results for the range sensor measurements. Section 5 provides simulation results for our theoretical derivations and the paper concludes with a discussion of the optimal configurations in Section 6. In fact, the results presented in this paper provide fundamental information about how the localization performance is affected by the sensor-target geometry for linear sensor arrays. This information is of significant value to users of multiple sensor (linear arrays) based localization systems.
2. Problem Formulation and Assumptions
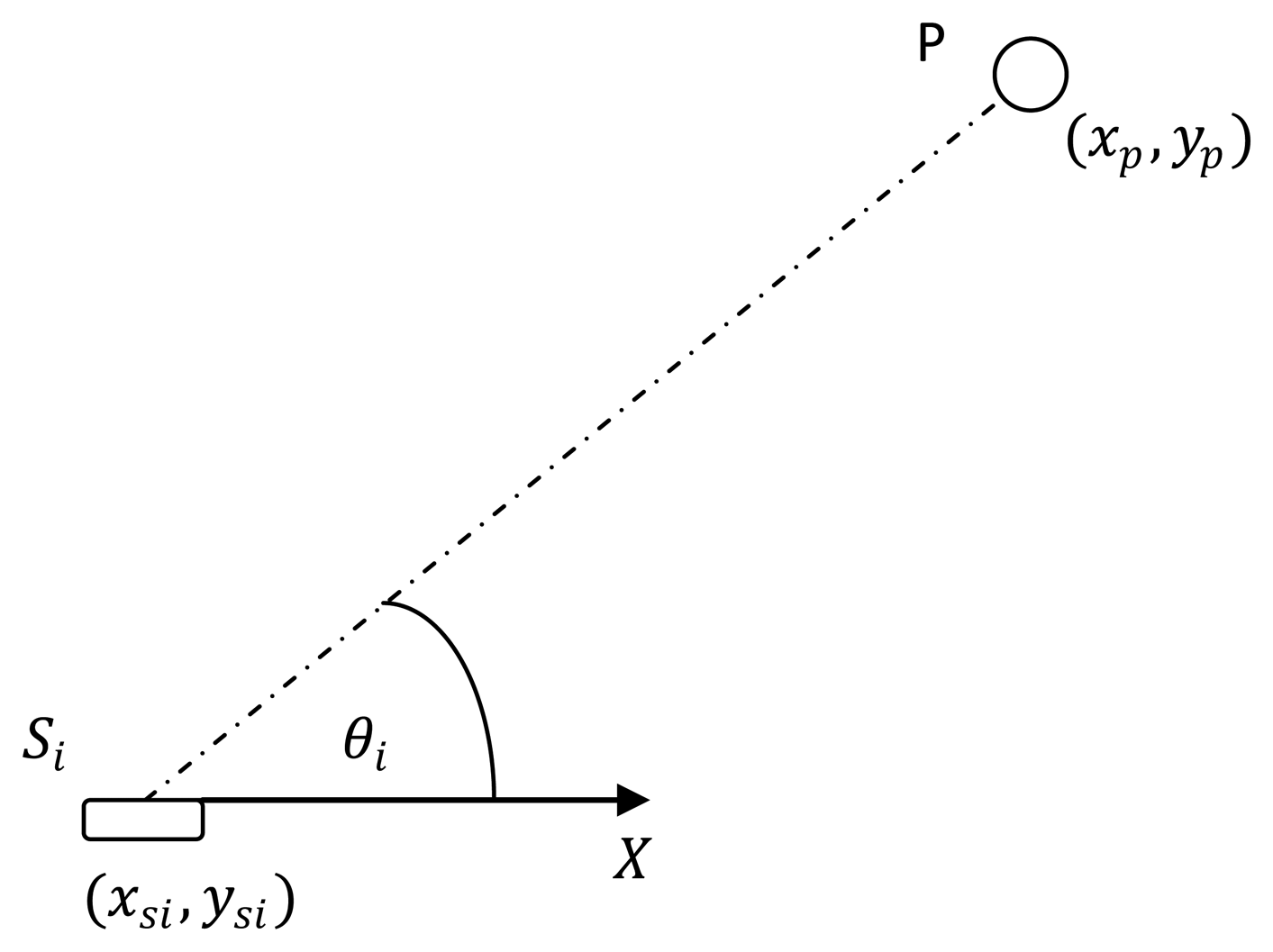
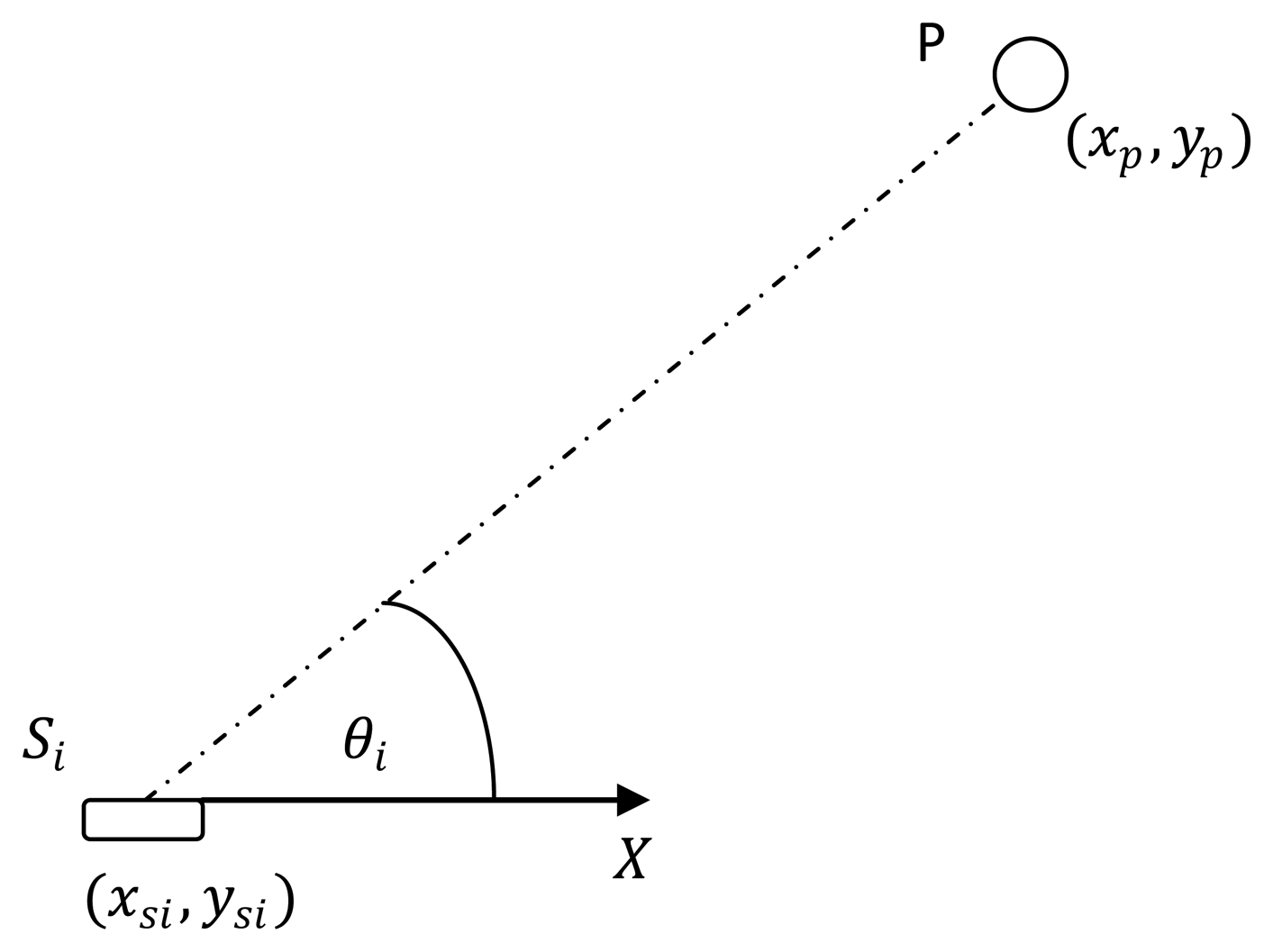
Consider the ith sensor of a multiple AoA/range sensors located in a linear array that are positioned to localize a single stationary target (Figure 1). The unknown location of the target is given by p = [xpyp]T. The AoA/range sensors are marked as i ∈ {1,2,…, N} and N ≥ 2 with the location of the ith sensor given by Si = [xsiysi]T. The distance between the sensor Si and the target P is given by ri = ‖p — Si‖. The bearing θi from sensor Si to the target is measured clockwise form x-axis such that θi(p) ∈ [0, 2π).
In general, the set of measurements from N sensors can be written as ẑ = z(p) + n, where z(p) = [z1(p) … zn(p)]t and n = [n1… nN]T. It is assumed that the measurement errors of distinct sensors are independent of each other. For simplicity, it is assumed that the error variances of multiple distinct sensors are equal and given by
. The covariance matrix for n sensors is then given by
, where IN is an N-dimensional identity matrix. The general measurement vector ẑ can thus be considered as an observable normally distributed random vector and can be described by ẑ ∼
 (z(p), Rz).
(z(p), Rz).
The Cramer–Rao inequality lower bounds the covariance achievable by an unbiased estimator under two mild regularity conditions. Considering the unbiased estimate p̂ for p, the Cramer–Rao bound states that
Consider the set of measurements from N sensors ẑ ∼
(z(p), Rz). The Fisher information matrix, in this case, quantifies the amount of information that the observable random vector ẑ carries about the unobservable parameter p. It is a matrix with the (i,j)th element given by
The analysis of the optimal geometry is subjected to the following constraints:
Fixed Uniform Linear Arrays (FULA): One sensor of the linear array is fixed and the distances between consecutive sensors are equal.
Uniform Linear Arrays (ULA): The distances between consecutive sensors are equal.
Fixed Non-Uniform Linear Arrays (FNULA): One sensor of the linear array is fixed and the distances between consecutive sensors may not be equal.
Non-Uniform Linear Arrays (NULA): The distances between consecutive sensors may not be equal.
2.1. AoA Based Localization
The measured value of angle (θi) is given by,
Then using Equation (2), Fisher information matrix (Iθ(p)) for N number of sensors around the target can be written as,
The Fisher information determinant for bearing-only localization can be given as,
2.2. Range Based Localization
The measured value of range (ri) is given by,
Then using Equation (2), the Fisher Information Matrix (Ir(p)) for N number of sensors around the target can be written as,
The Fisher information determinant for range-only localization can be given as,
3. Optimal Geometries for Inline AoA Sensors
3.1. Fixed Uniform Linear Arrays(FULA)
Theorem 1
Consider that a target is at P(xp, yp) which is b distance away from the x-axis. N number of AoA sensors (one fixed at the origin) are on the x-axis, separated by x distance from each other. The Fisher information determinant for this case is
Proof 1
Translating Equation (3) into Cartesian coordinates and rearranging leads to Equation (5).
Corollary 1
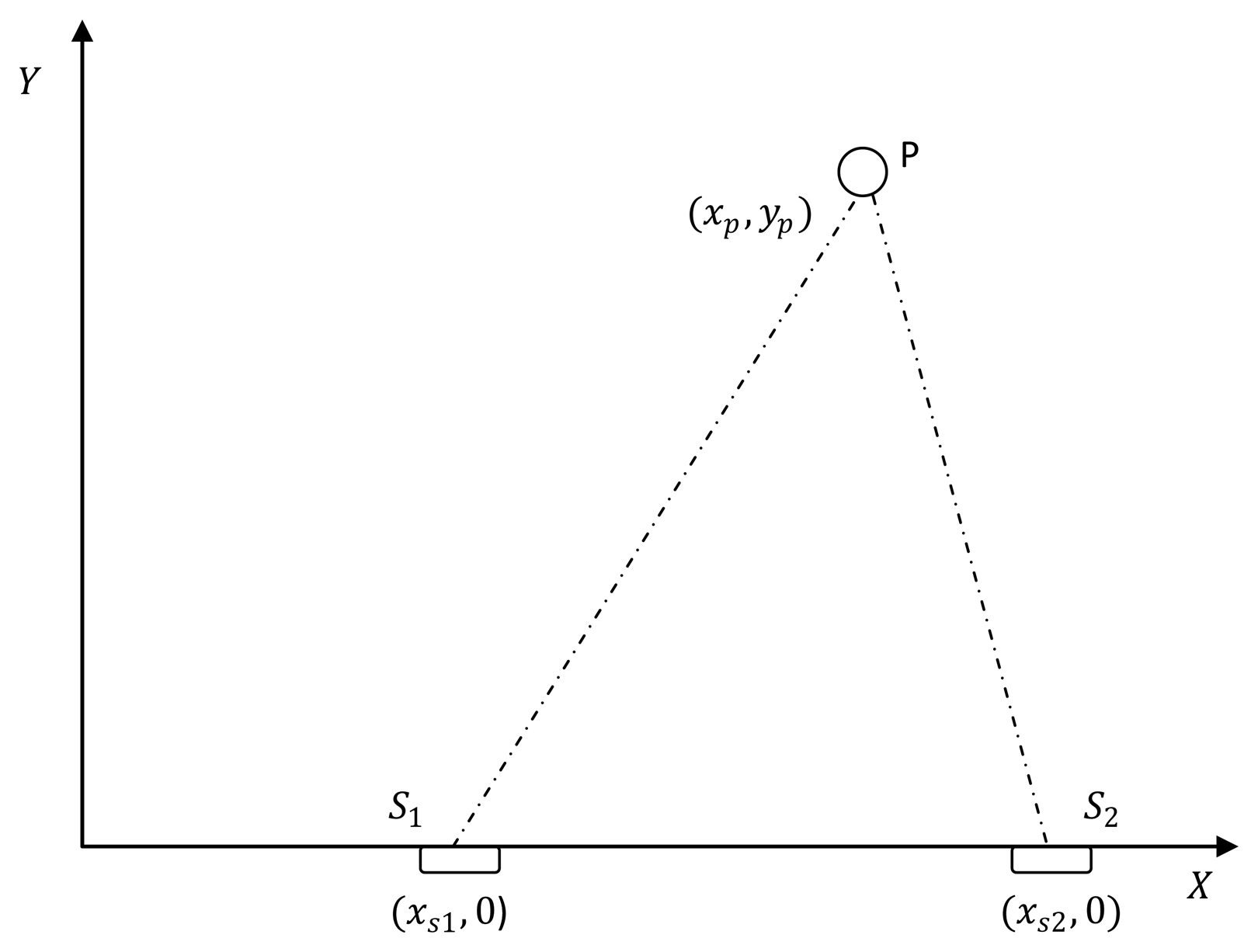
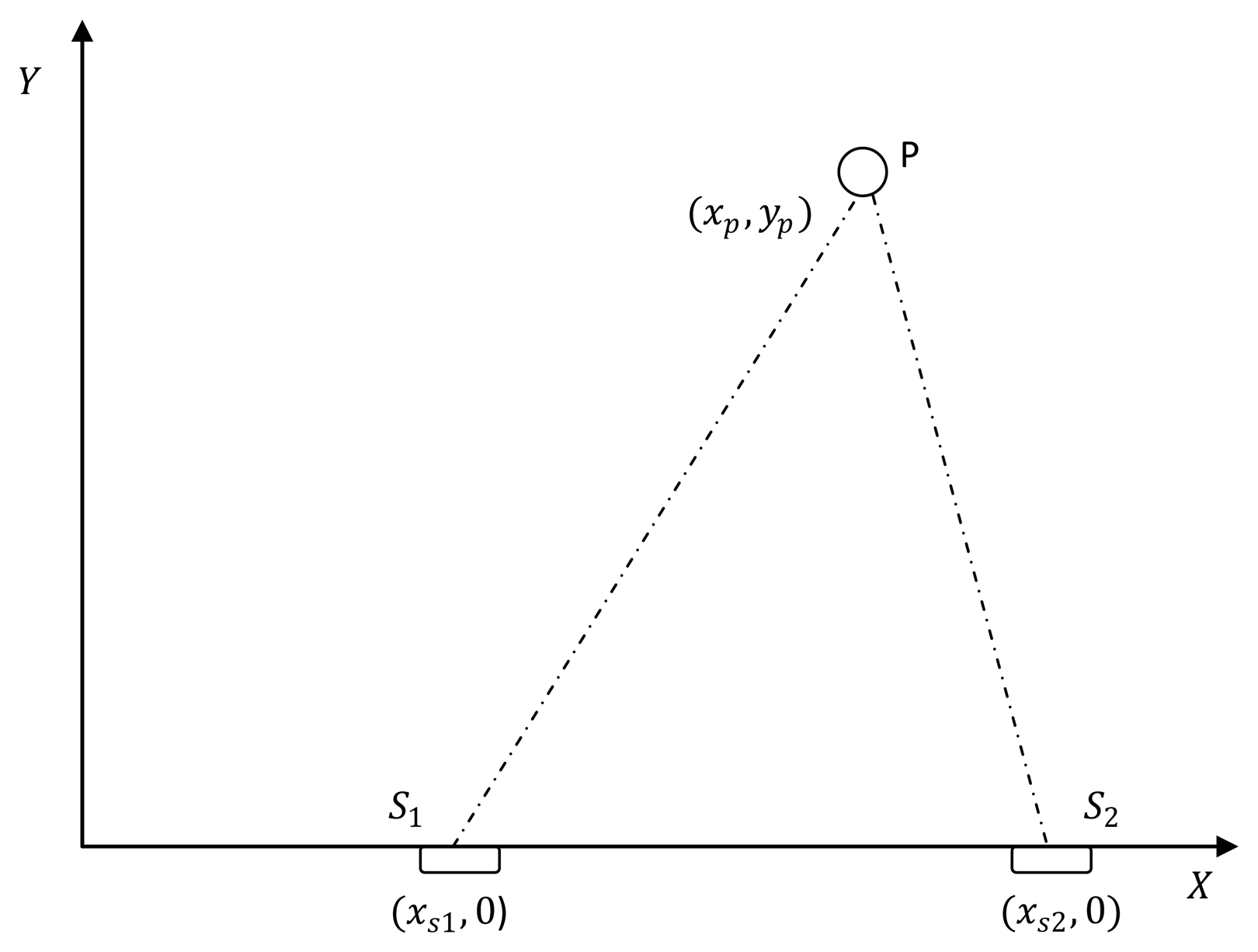
Consider that the target location is P(xp, yp) and the position of the fixed sensor (S1) and the line on which the second sensor to be placed is known (Figure 2). Then the optimal distance between these two sensors is equal to the distance between the fixed sensor and the target (i.e., ‖S1 − S2‖ = ‖S1 − P‖).
Proof 2
With no loss of generality consider two sensors, one fixed at the origin (S1 = [xs1 = 0 0]T ), the other on the x-axis (S2 = [xs2 0]T ). The Fisher information determinant for this case is
By maximizing Equation (6) with respect to xs2, it can be shown that, det(x(p)) maximizes when,
Hence, ‖S1− S2‖ = ‖S1− P‖.
3.2. Uniform Linear Arrays (ULA)
Theorem 2
Consider N sensors on a given line b distance away from a target. When x is the distance between consecutive sensors, the optimal localization of the target occurs for the x, which maximize the following Fisher information determinant,
Proof 3
Translating Equation (3) into Cartesian coordinates and rearranging leads to Equation (7).
Corollary 2
For two AoA sensors, the optimal sensor separation occurs when ‖S1− S2‖ = ‖ S1− P‖ = ‖S2− P‖.
Proof 4
Using Equation (3), the Fisher information determinant for this case is
3.3. Fixed Non-Uniform Linear Arrays (FNULA)
Suppose a target (P) is to be localized using N number of linear sensors (S1, S2, ,… , SN). Translating Equation (3) in to Cartesian coordinates, it can be shown that the Fisher information determinant for this case is
Finding the optimal sensor separations becomes an (N − 1)-dimensional optimization problem. Finding the solutions is mathematically challenging when n>3 and the solutions for the n = 3 case have been found in [40], which is a two-dimensional optimization problem.
3.3.1. Non-Uniform Linear Arrays (NULA)
Theorem 3
Consider N number of AoA sensors on a given line b distance away from a target. At the optimal geometry, sensors form an equilateral triangle with the target.
N is even; N/2 sensors overlap at each corner of the triangle located on the line.
N is odd; (N − 1)/2 and (N + 1)/2 sensors overlap at each corner of the triangle located on the line respectively.
Proof 5
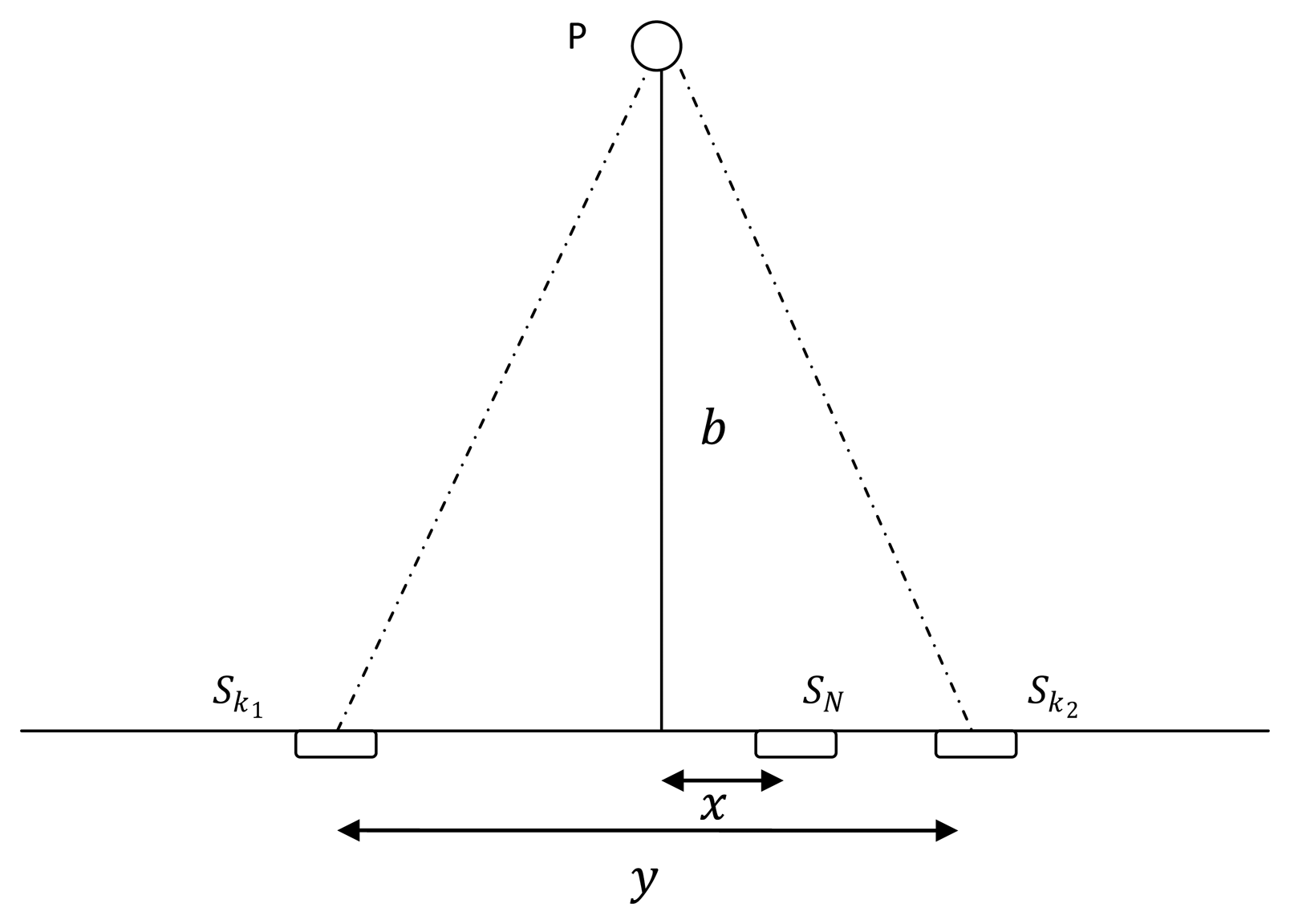
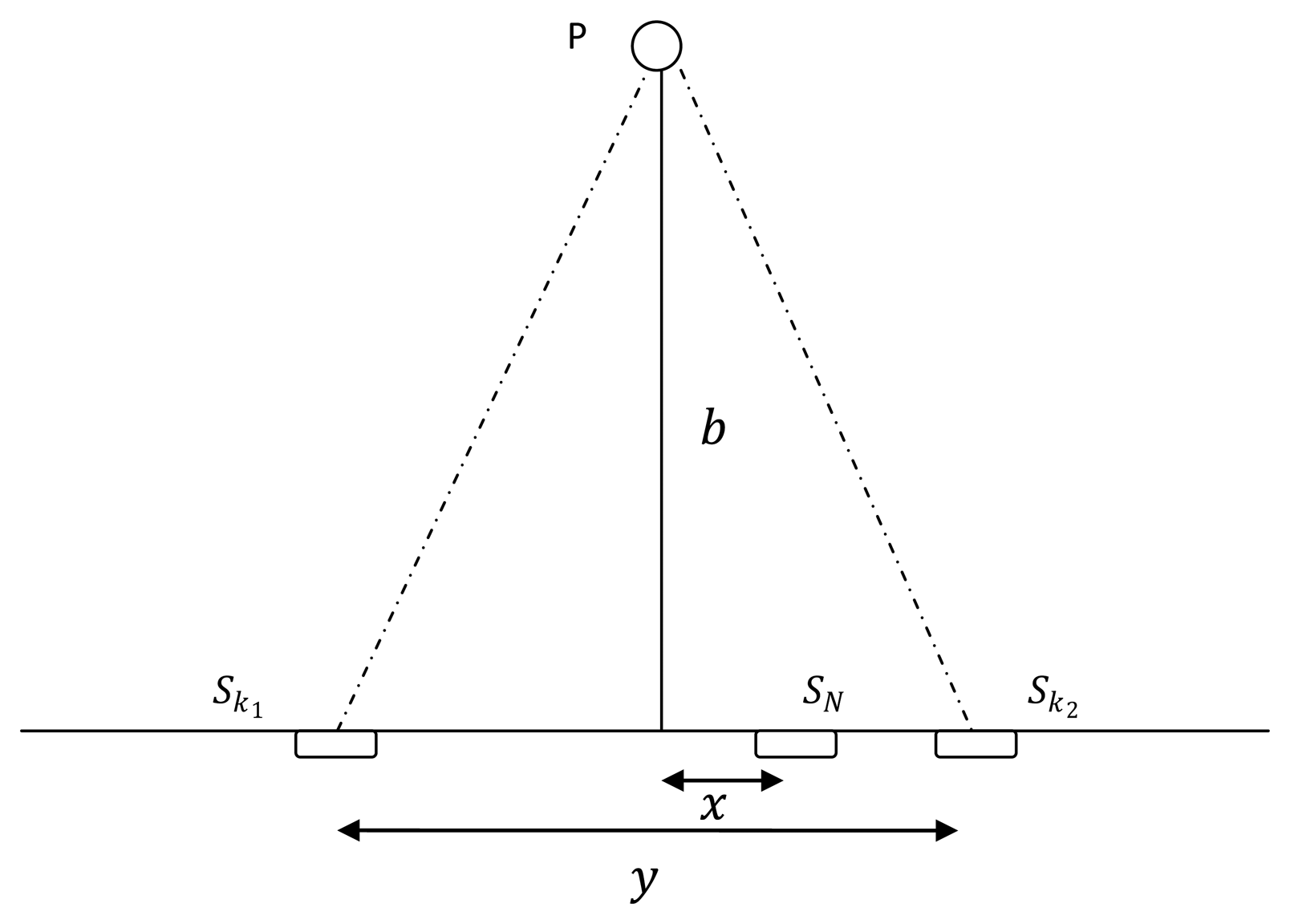
Consider the sensor-target geometry shown in Figure 3. When the total number of sensors used for localization is odd (N ∈ {3,5, 7,…}); assume that (N − 1)/2 number of sensors are overlapping at each corner of the triangle (Sk1 and Sk2), which are y distance apart and the remaining sensor is x distance away from the symmetric axis. Using Equation (3) the Fisher information determinant for this case can be written as
It can be shown that Equation (9) is at maximum when and . When the total number of sensors used for localization is even (N ∈ {2,4,6,…}); assume that N/2 and N/2 − 1 number of sensors are overlapping at each corner of the triangle (Sk1 and Sk2), which are y distance apart and the remaining sensor is x distance away from the symmetric axis. Using Equation (3) the Fisher information determinant for this case can be written as
It can be shown that Equation (10) reaches its maximum when and. Then it is clear that for any N ≥ 2, and provide the optimal geometry for AoA-based localization, which is an equilateral triangle.
4. Optimal Geometries for Inline Range Sensors
4.1. Fixed Uniform Linear Arrays (FULA)
Theorem 4
Consider that a target is at P(xp, yp) and b distance away from the x-axis. N number of linear range sensors (one fixed at the origin), separated by x distance from each other, are on the x-axis. The Fisher information determinant for this case is
Proof 6
Translating (4) into Cartesian coordinates and rearranging leads to (11).
Corollary 3
Consider that the target is at P(xp, yp) and the position of one sensor (fixed) and the line on which the second sensor to be placed is known. The optimal geometry occurs when the angle subtended by the sensors at the target is π/2 (i.e., S1P̂S2 = π/2).
Proof 7
With no loss of generality consider two sensors, one fixed at the origin (S1 = [xs1 = 0 0]T) and the other on the x-axis (S2 = [xs2 0]T). The target is at P(xp, yp) as shown in Figure 2. The Fisher information determinant for this case is
By maximizing the (12) with respect to xs2, it can be shown that, det(x(p)) maximizes when,
This proves that the optimal geometry occurs when the angle subtended by the sensors at the target is π/2.
4.2. Uniform Linear Arrays (ULA)
Theorem 5
Consider N sensors on a given line that are b distance away from the target. With equal distance x between consecutive sensors, the optimal localization of the target occurs for the x, which maximizes the following Fisher information determinant,
Proof 8
Translating Equation (4) into Cartesian coordinates and rearranging leads to Equation (13).
Corollary 4
For two range sensors, the optimal sensor target geometry occurs when the angle subtended by the sensors at the target is π/2 (i.e., S1P̂S2 = π/2).
Proof 9
Using Equation (4), the Fisher information determinant for this case is
This result agrees with the geometrical relationships obtained in [11], where they prove that, for two range sensors, the optimal sensor-target geometry is unique and occurs when the angle subtended by the sensors at the target is π/2.
4.3. Fixed Non-Uniform Linear Arrays (FNULA)
Suppose a target (P) is to be localized using N number of linear sensors (S1, S2,…, SN). Translating Equation (4) into Cartesian coordinates, it can be shown that the Fisher information determinant for this case is
Finding the optimal sensor separation becomes an (N − 1)-dimensional optimization problem.
4.4. Non-Uniform Linear Arrays (NULA)
Suppose a target (P) is to be localized using N number of inline sensors (S1, S2,…, SN). Translating Equation (4) into Cartesian coordinates, it can be shown that the Fisher information determinant for this case is
Finding the optimal sensor separation becomes an N-dimensional optimization problem, which will be discussed in detail in our future research.
5. Simulations
5.1. Simulations Related to Theorem 1
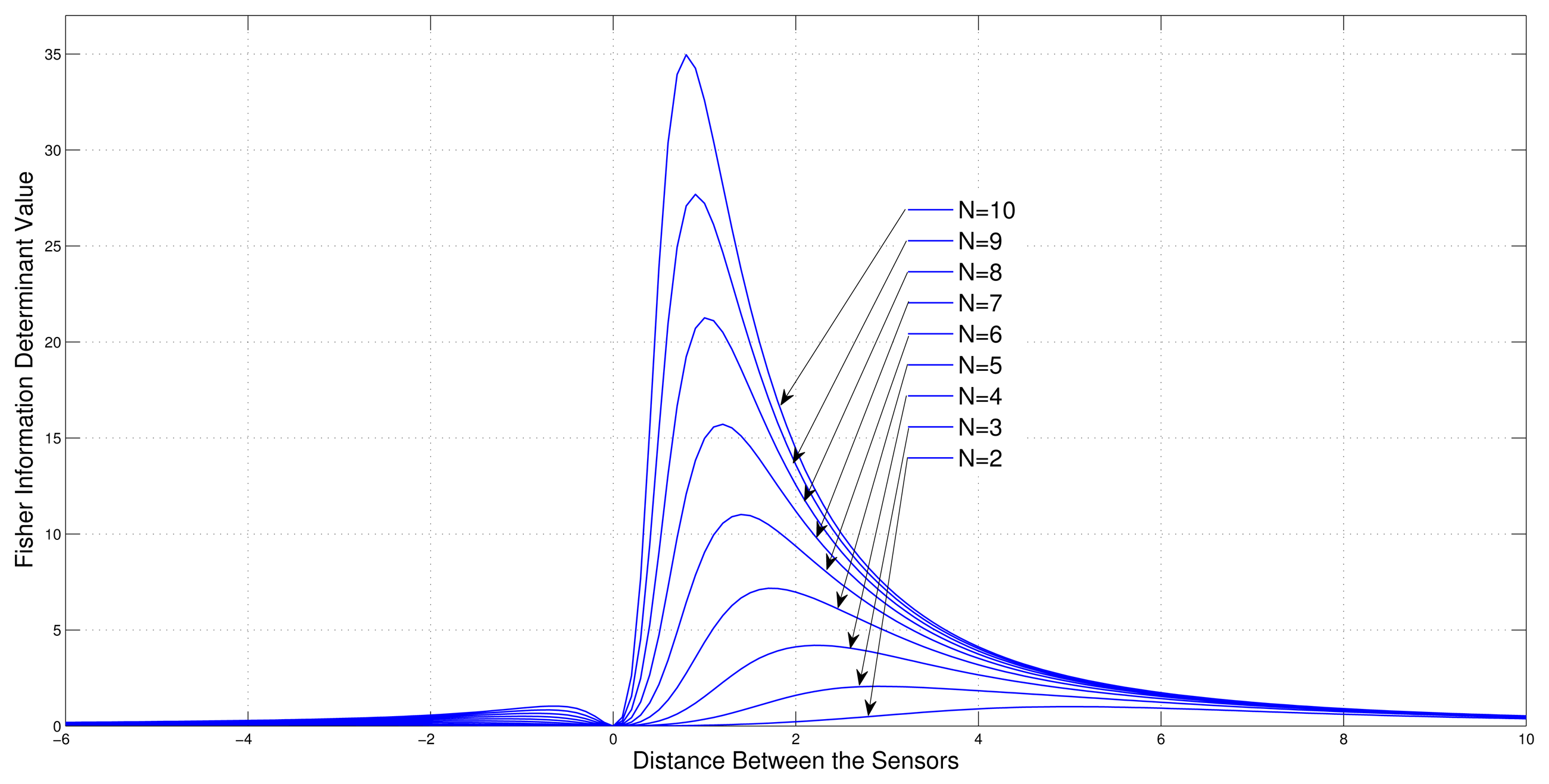
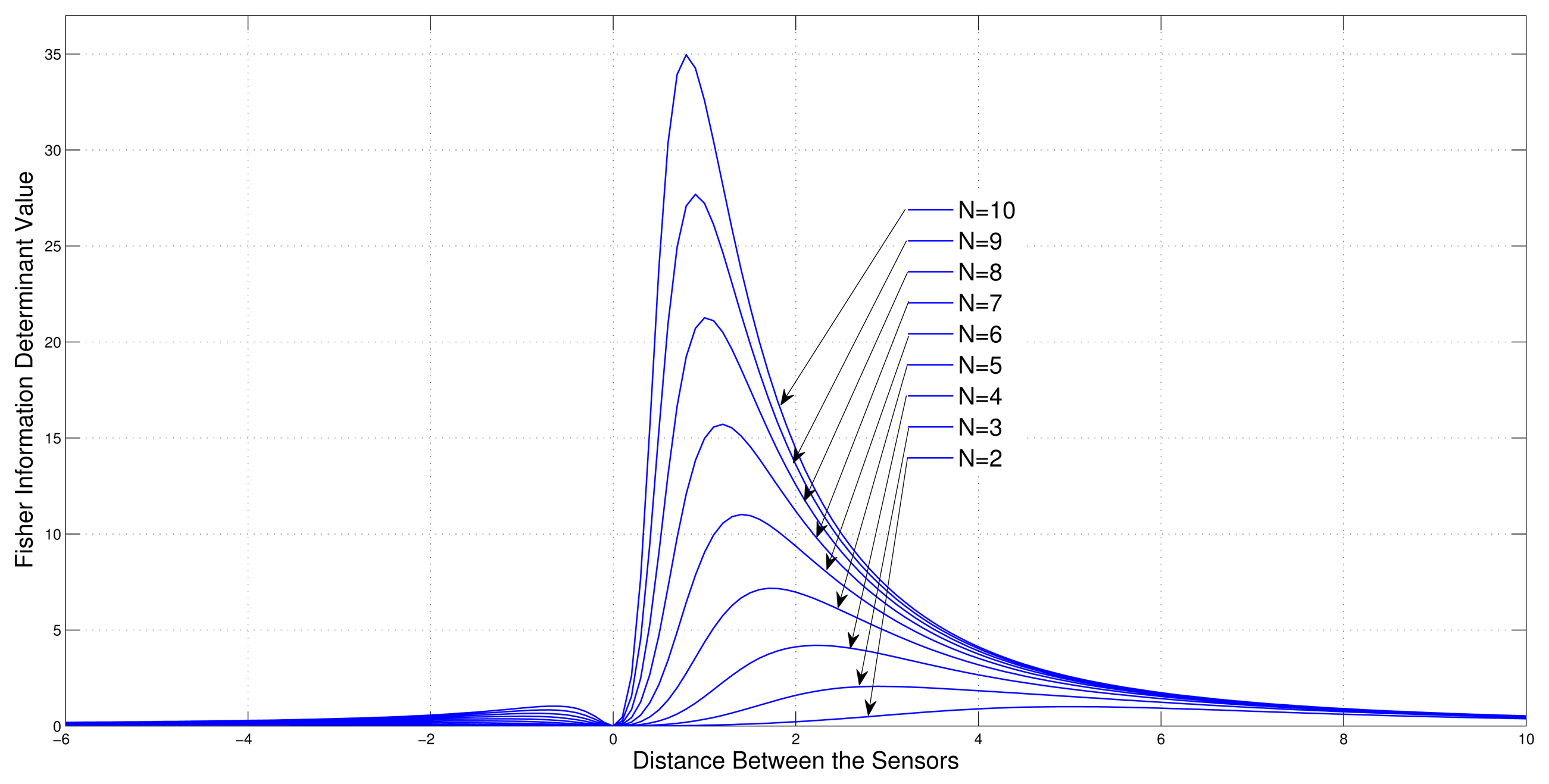
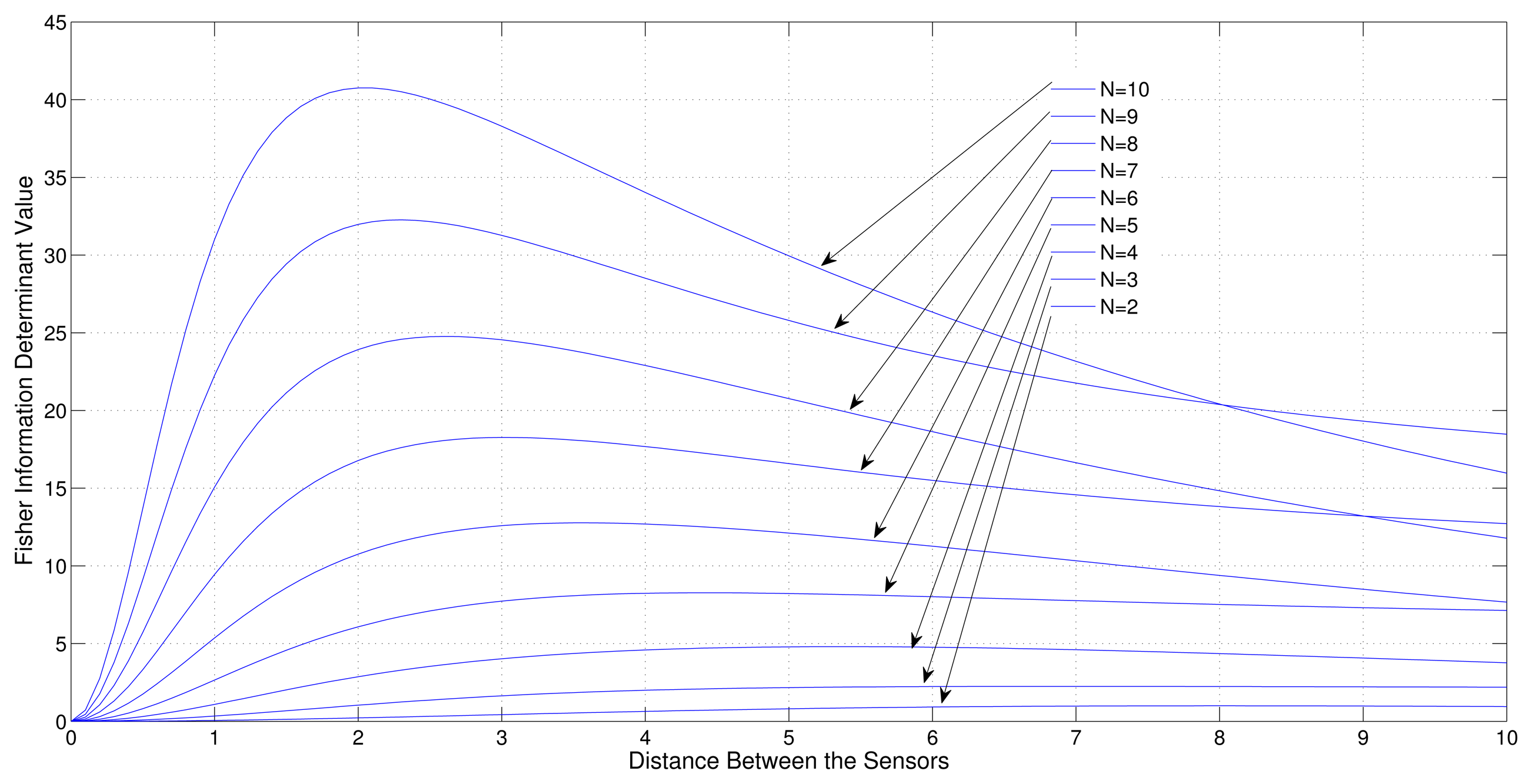
Consider a sensor-target geometry where one sensor (S1) is fixed at the origin and the other sensors (S2,S3, … SN) are free to be located on the x-axis with equal distance from each other. The target is at P = [3 4]T. Figure 4 shows the variation of the Fisher information determinant value with the distance between the sensors for different numbers of sensors.
It can be seen from the figure that when the number of sensors is increased, the Fisher information determinant value increases and the inter-sensor distance decreases for optimal localization, which is unique for a given number of sensors.
5.2. Simulations Related to Theorem 2
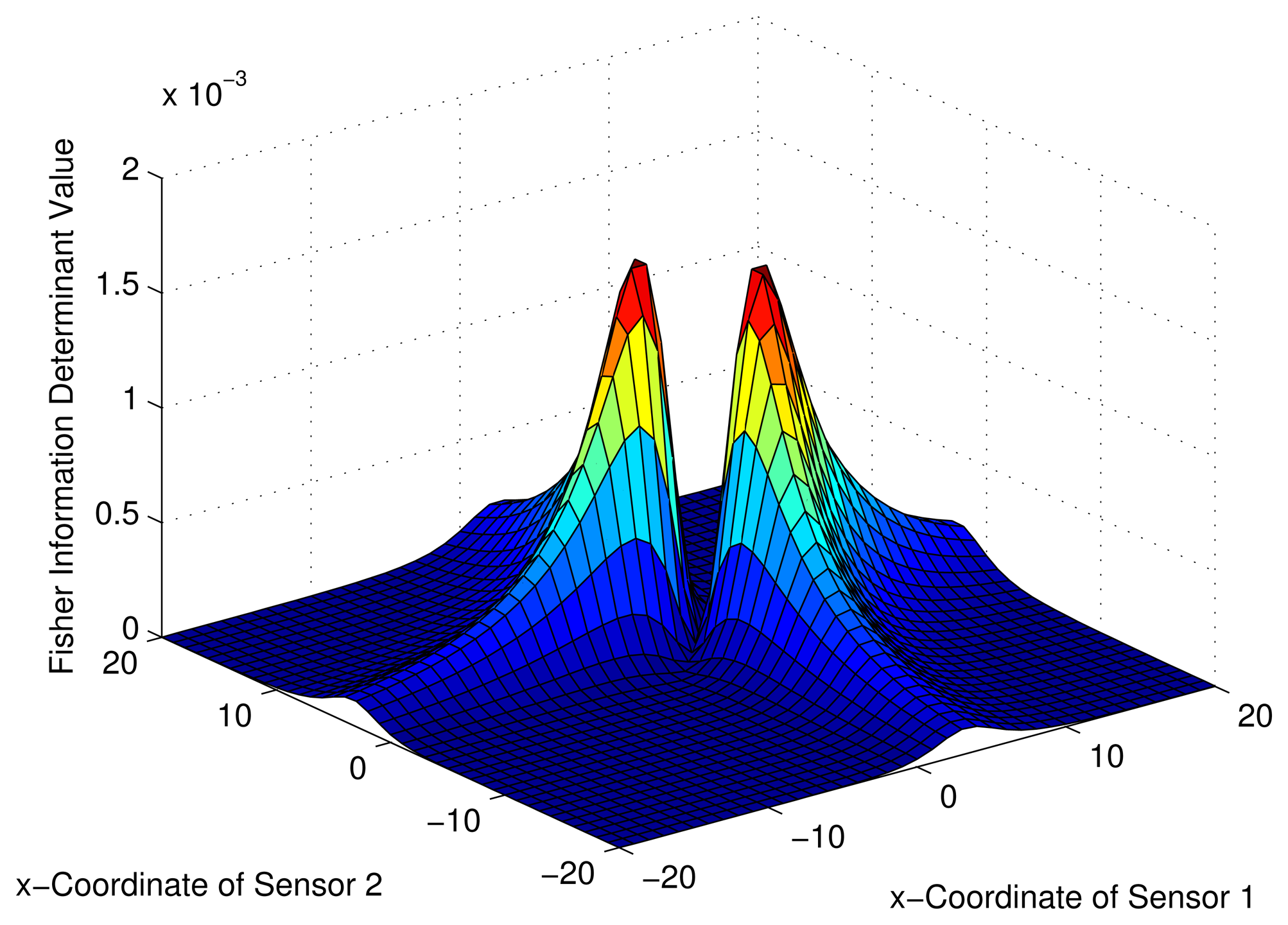
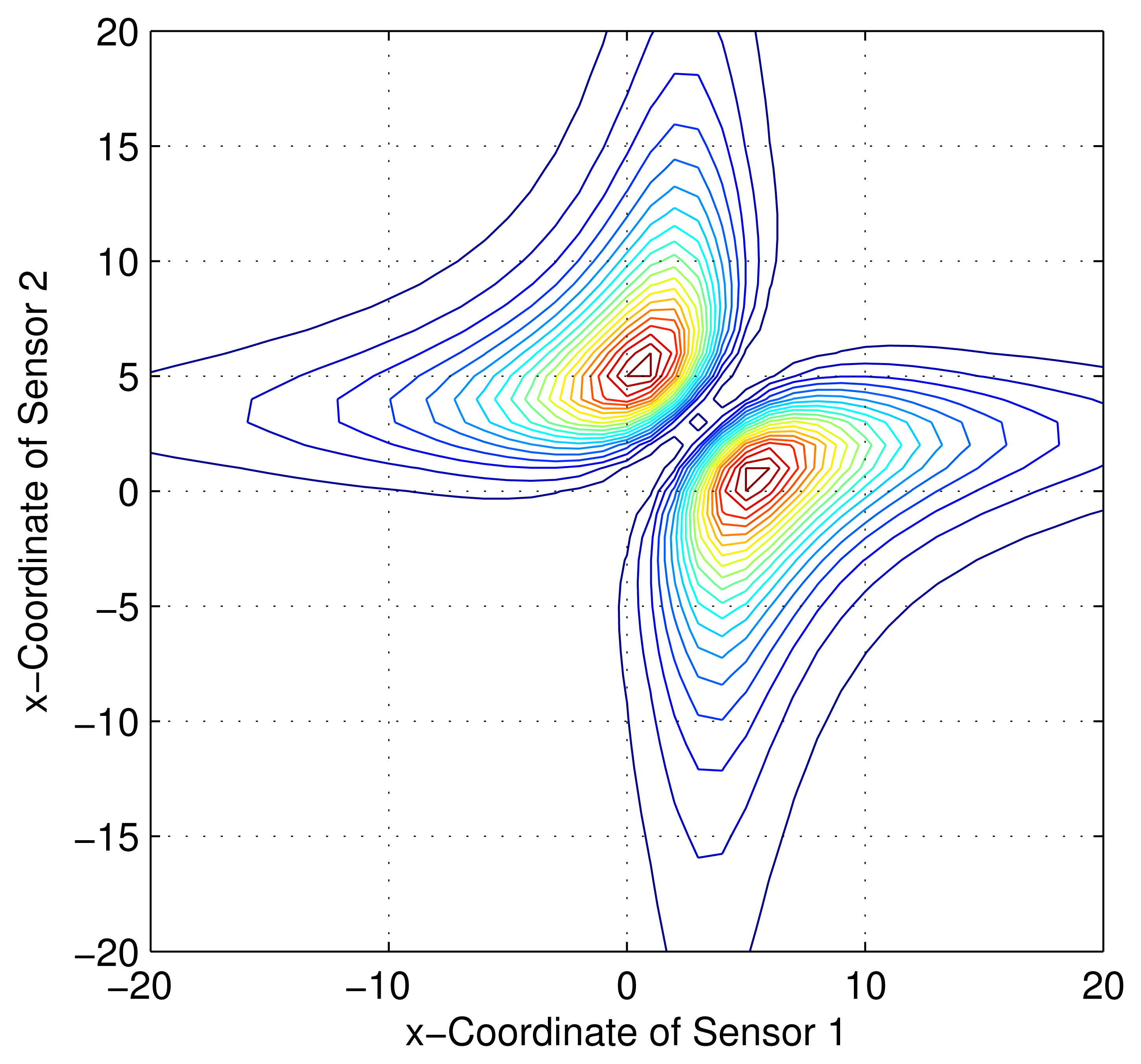
5.2.1. Two Adjustable Sensors
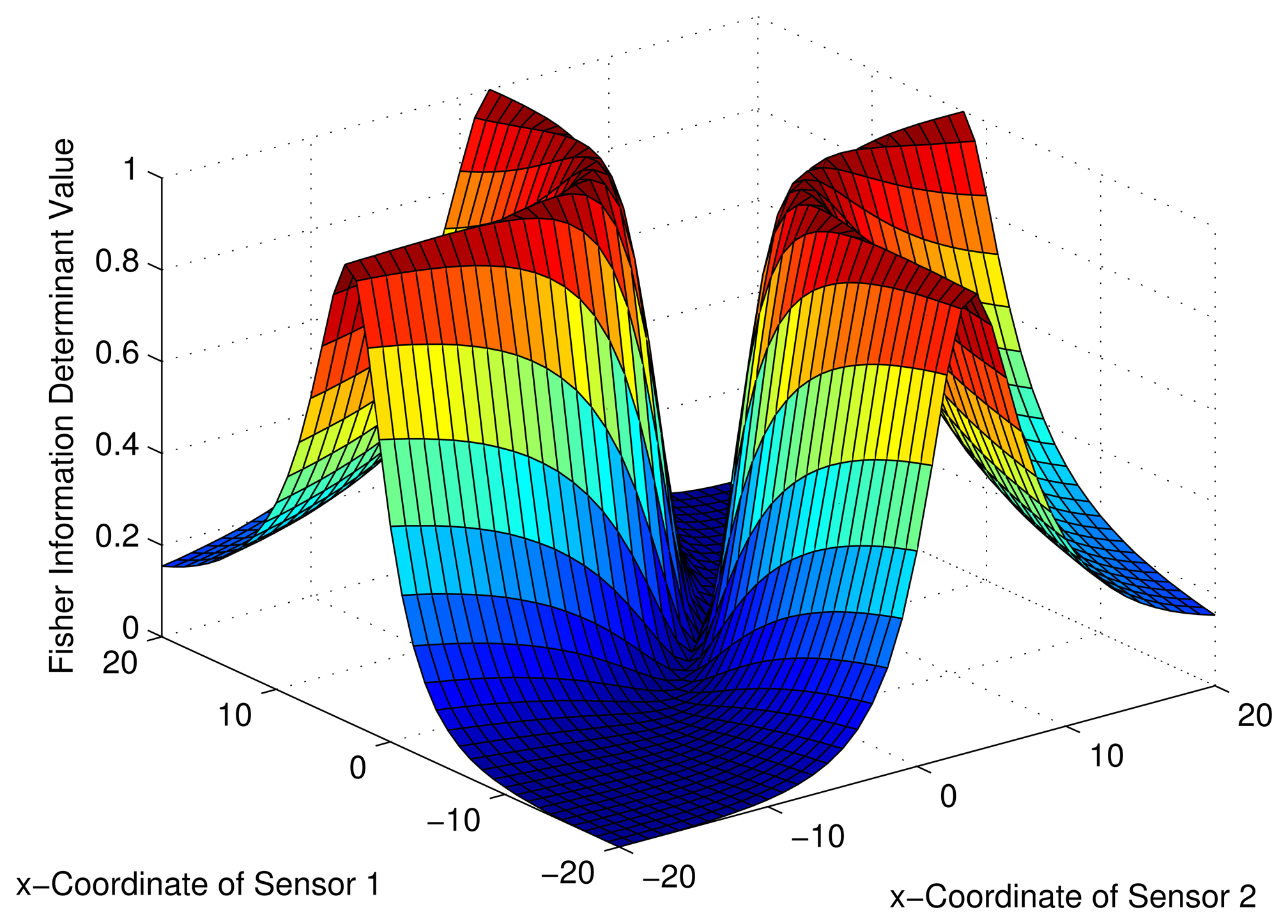
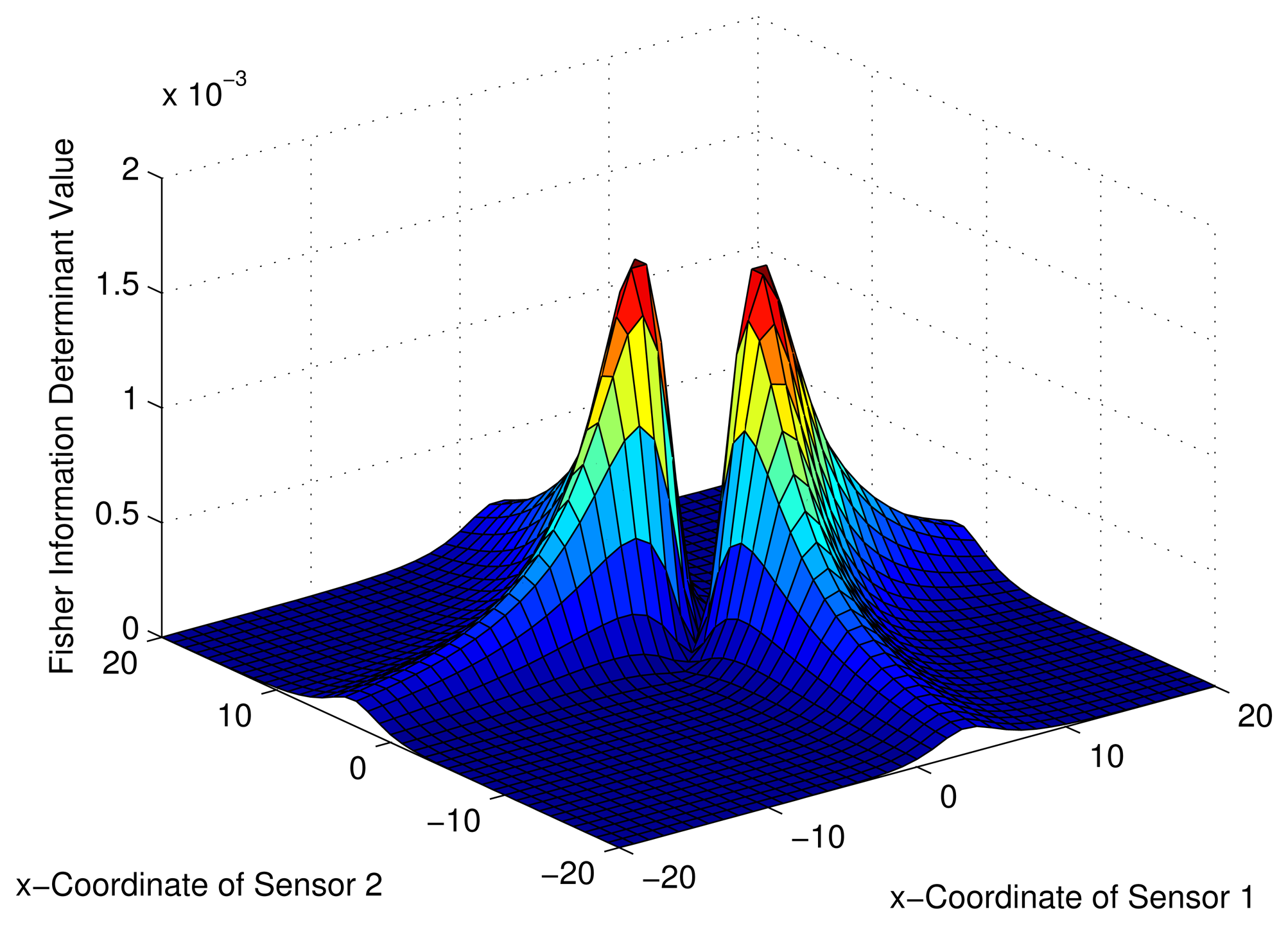
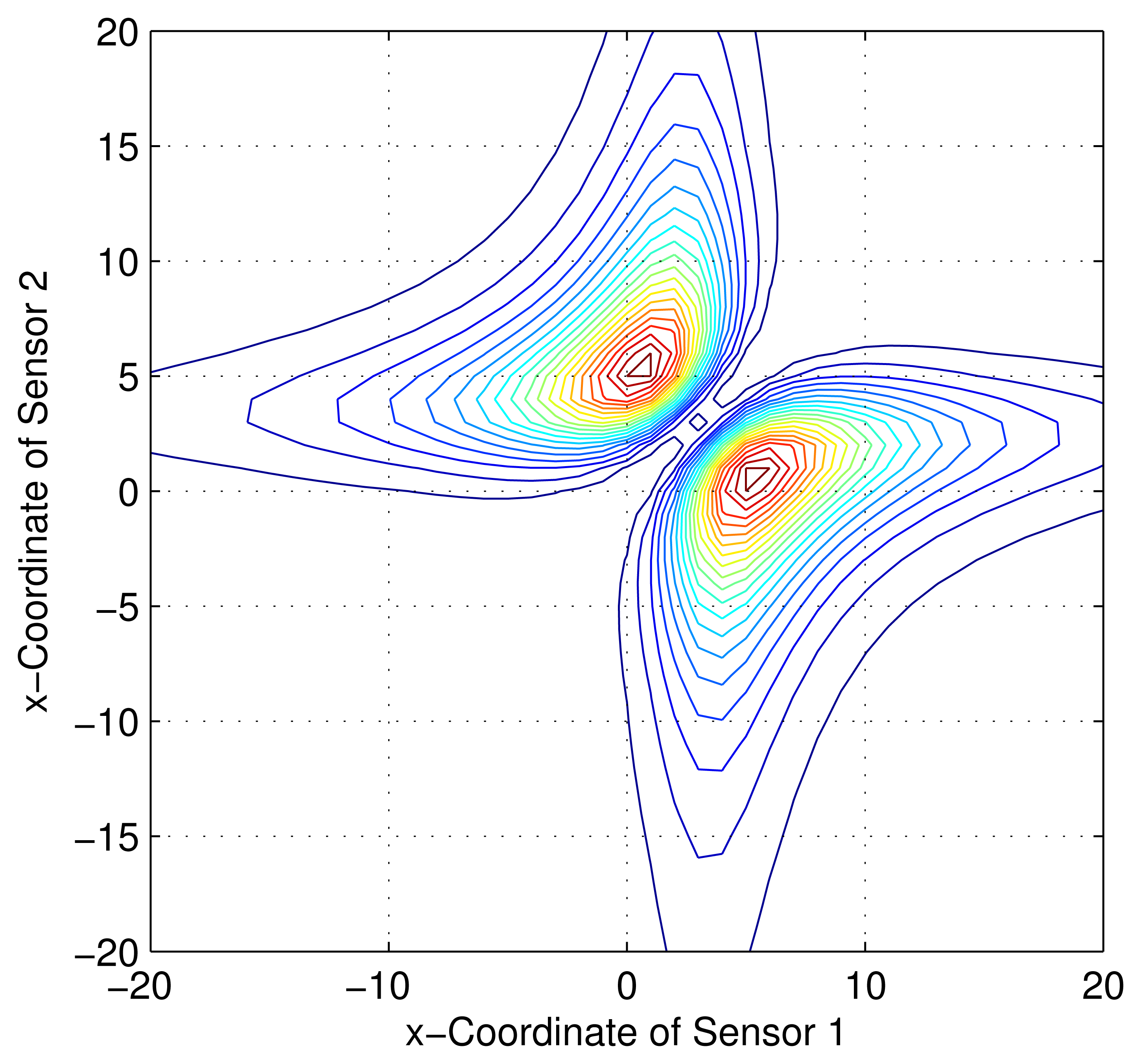
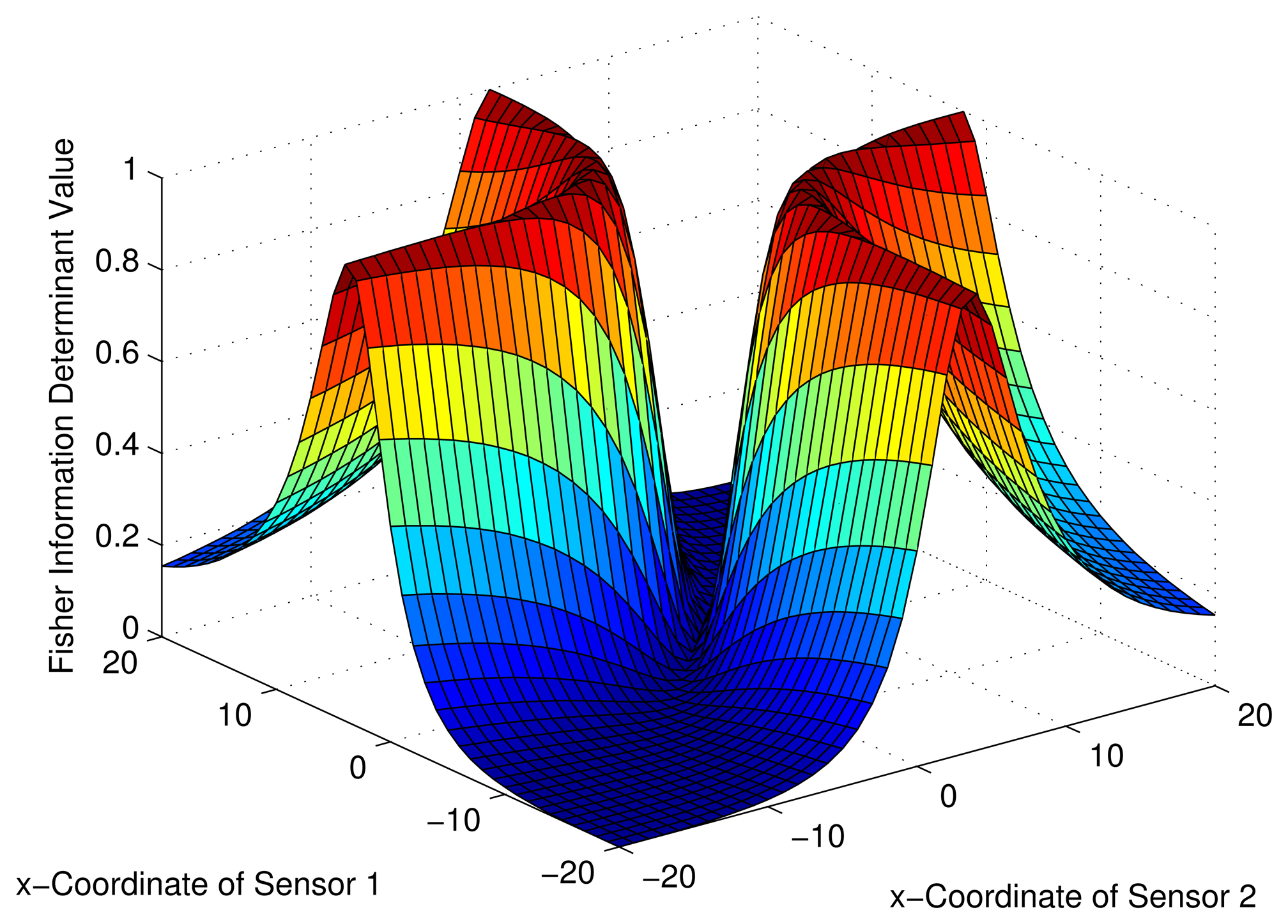
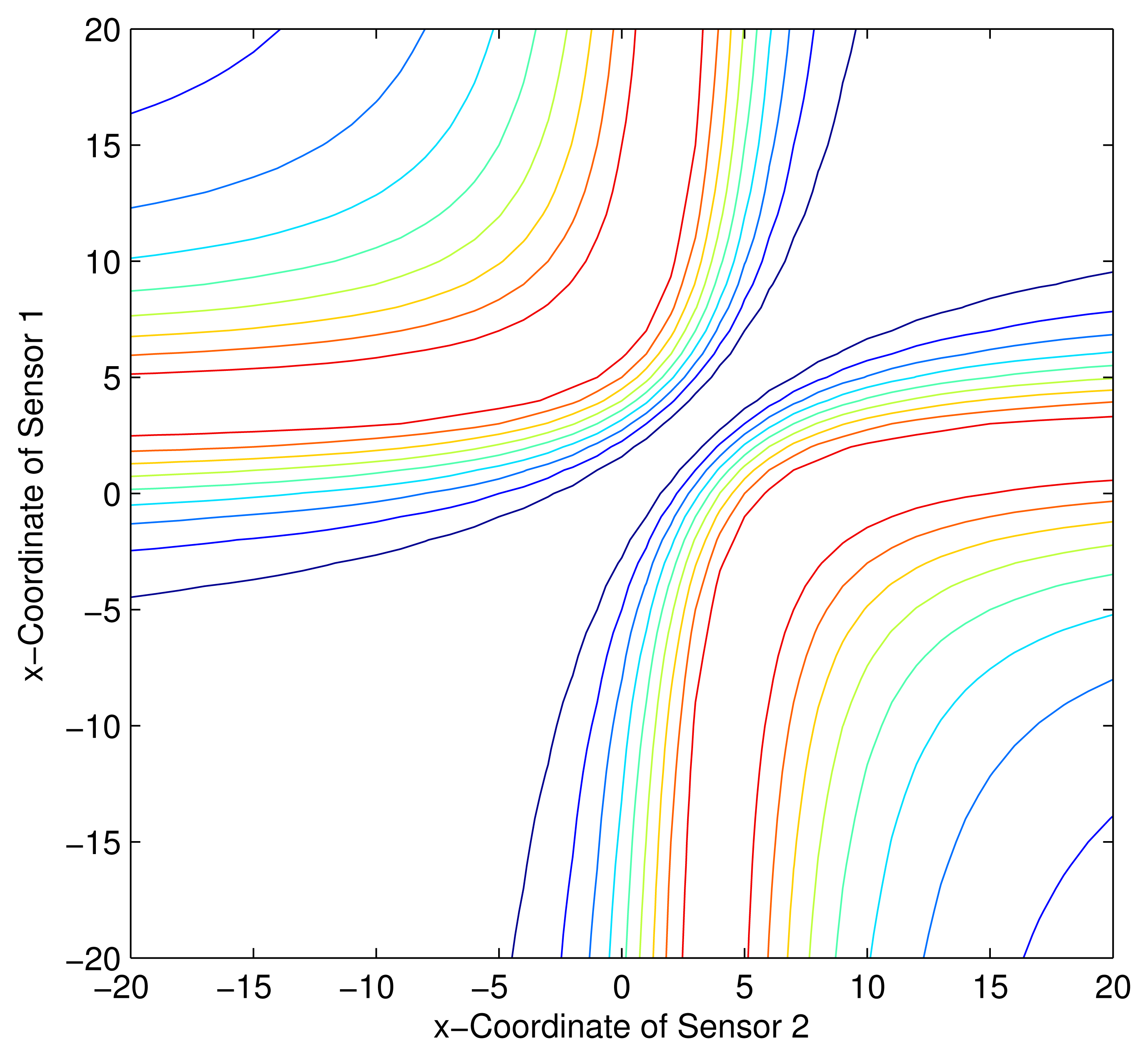
Consider a sensor-target geometry as depicted in the Figure 2, where the sensors (S1) and (S2) are located anywhere on the x-axis. The target is at P = [3 4]T. The variation of the Fisher information determinant value with the positions of the two sensors is depicted in Figure 5 and the corresponding contour plot in Figure 6. It can be seen that the Fisher information value is maximized when and (Corollary 2). When xs1 and xs2 attain these values, the geometry of the sensor-target configuration is an equilateral triangle. (i.e., ‖S1 − S2‖ = ‖S1 − P‖ = ‖S2 − P‖).
5.2.2. ULA with Multiple Adjustable Sensors
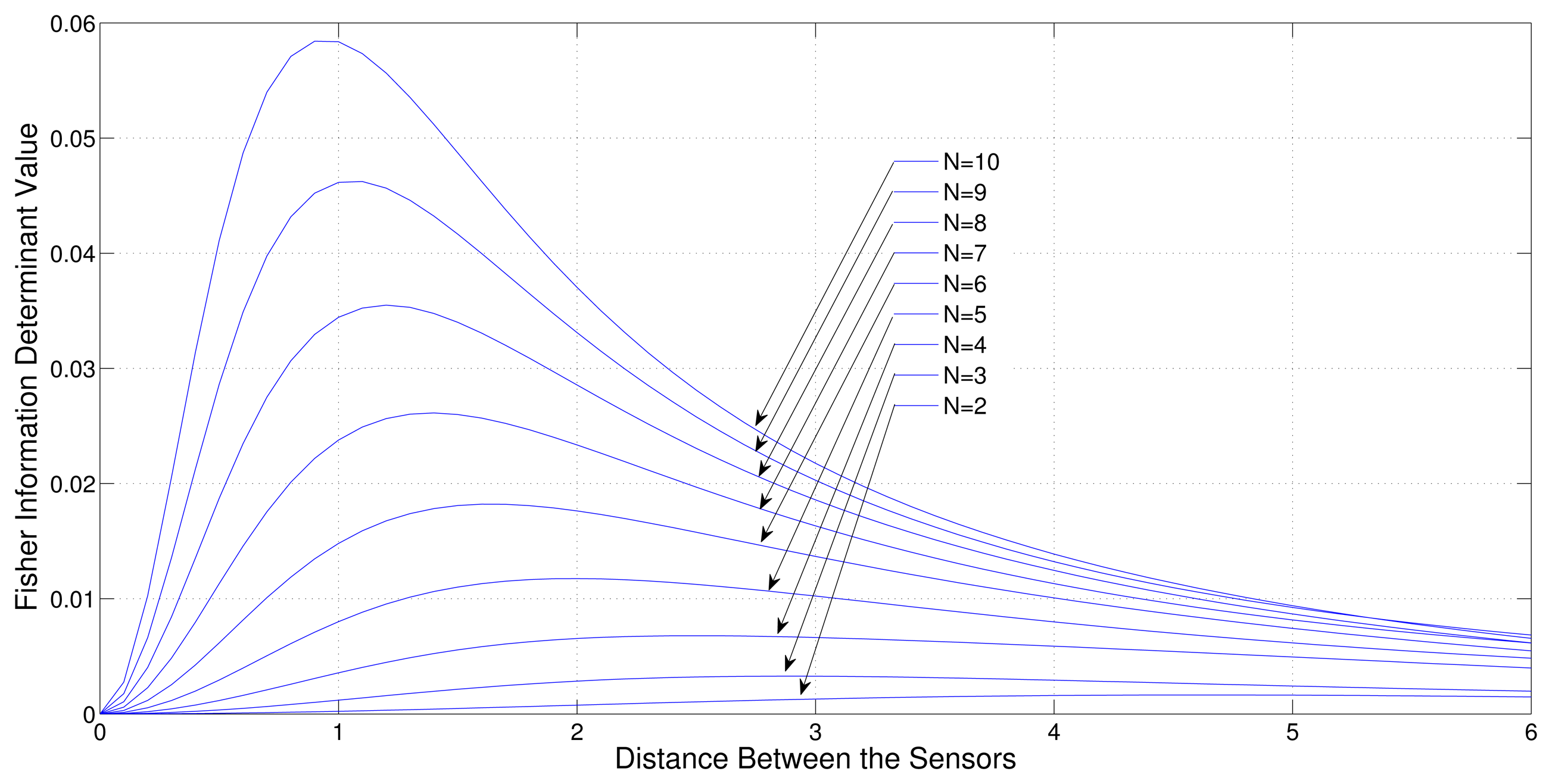
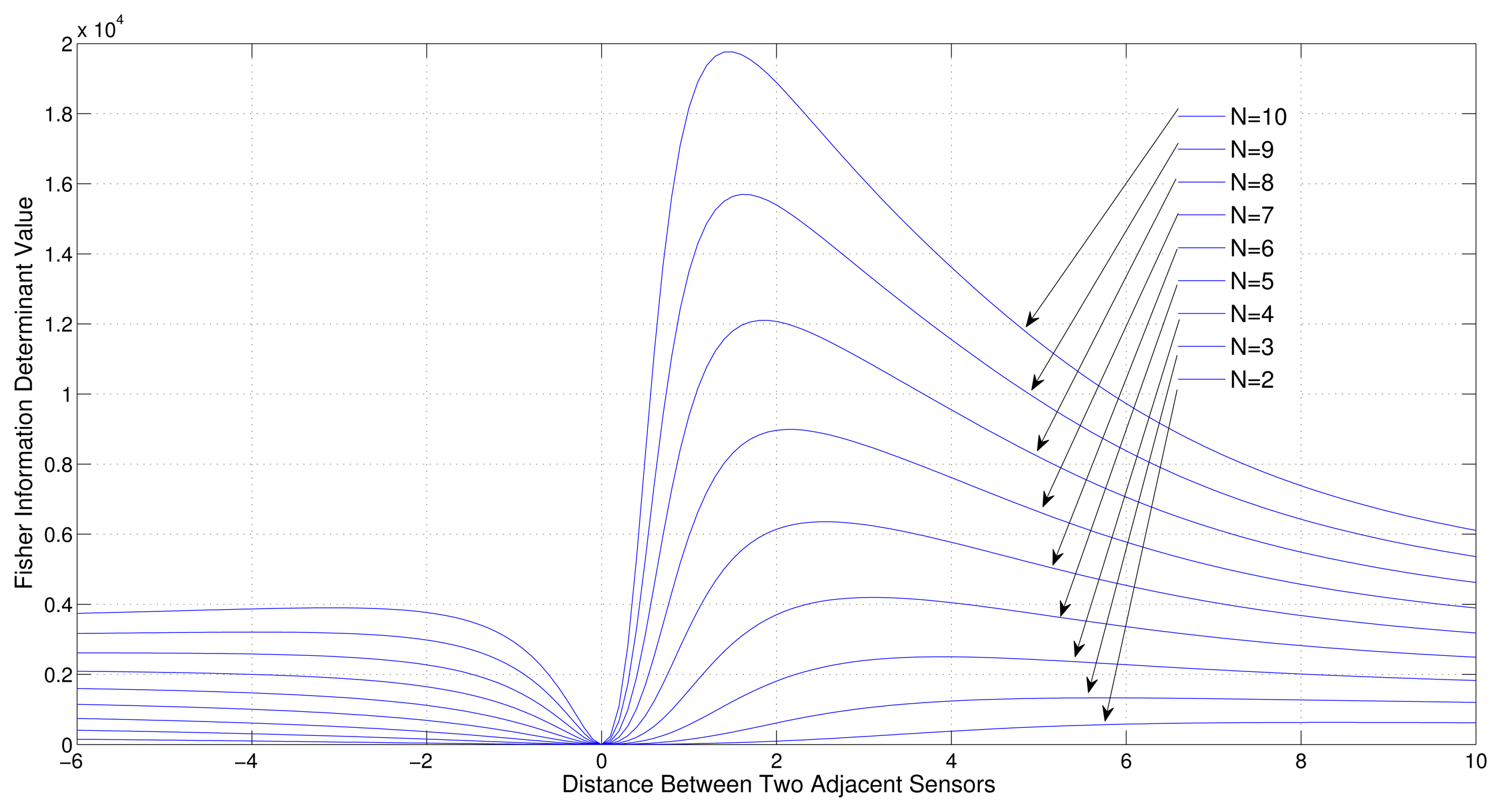
Consider a sensor target geometry as depicted in the Figure 3, where all the sensors are equally separated by x distance and the distance to the target from the line on which the sensors are placed is 4. The variation of Fisher information determinant value with respect to x is depicted in Figure 7 for different numbers of sensors.
It can be seen from the figure that when the number of sensors is increased, the Fisher Information determinant value increases and the distance between the sensors decreases for optimal localization, which is unique for a given number of sensors.
5.3. Simulations Related to Theorem 4
Consider a sensor-target geometry where one sensor (S1) is fixed at the origin and the other sensors (S2,S3, … SN) are located anywhere on the x-axis keeping the same distance from each other. The target is at P = [3 4]T. Figure 8 shows the variation of Fisher information determinant value with the distance between the sensors for different number of sensors.
It can be seen from the figure that when the number of sensors is increased, the Fisher information determinant value increases and the distance between the sensors decreases for optimal localization, which is unique for a given number of sensors.
5.4. Simulations Related to Theorem 5
5.4.1. Two Adjustable Sensors
Consider a sensor-target geometry as depicted in the Figure 2, where the sensors (S1) and (S2) are located anywhere on the x-axis. The target is at P = [3 4]T. The variation of the Fisher information determinant value with the locations of the two sensors is depicted in Figure 9 and the corresponding contour plot in Figure 10. It can be seen that the Fisher information value maximizes when xs1 and xs2 satisfy (14)(Corollary 4).
5.4.2. ULA with Multiple Adjustable Sensors
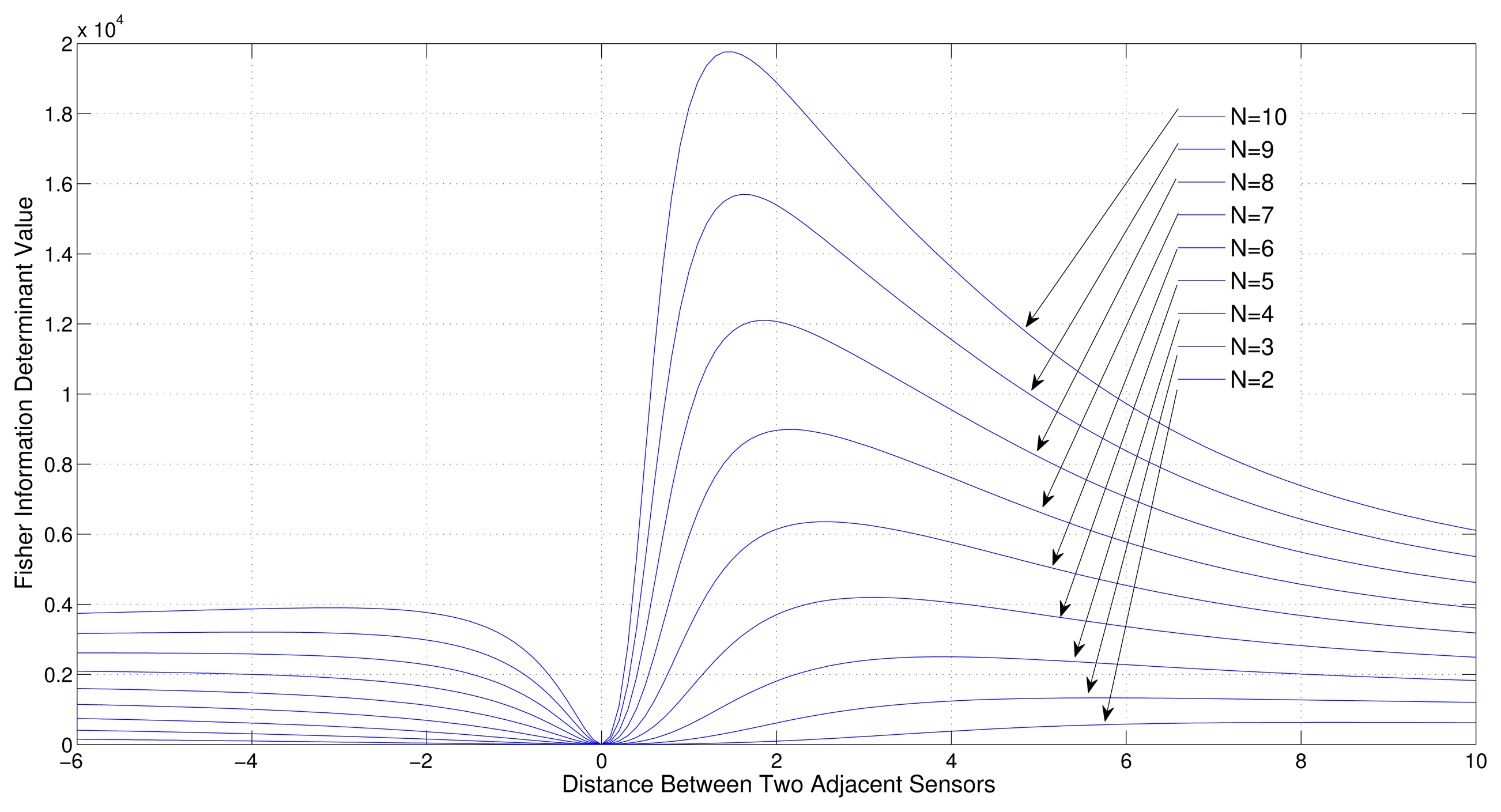
Consider a sensor-target geometry where all the sensors are equally separated by x distance and the distance to the target from the line on which the sensors are placed is 4. Variation of the Fisher Information determinant value with respect to x is depicted in Figure 11 for different number of sensors.
It can be seen from the simulation that when the number of sensors increases, the Fisher information determinant value increases and the distance between the sensors decreases for optimal localization, which is unique for a given number of sensors.
6. Conclusions
In this paper, we have provided a characterization of optimal sensor-target geometry for linear arrays of AoA and range sensors in passive localization problems in ℝ2. We have mainly discussed two generic problems of fully adjustable linear sensor arrays and the case of an array, where the sensors are free to be moved with respect to a fixed sensor. Cramer–Rao lower bound and the corresponding Fisher information matrices are used to analyze the sensor target geometry for optimal localization.
The perfect knowledge of the emitter position should be available in the theoretical development for determining optimal sensor placement. Even though in practical applications this information is not available, a rough estimate of the likely region of the emitter is sufficient in determining the sensor positions to obtain improved localization results. Hence the results of this paper can be utilized to establish guidelines for linear sensor placement leading to improved performance.
The analysis given in this paper is also related to optimal path planning and trajectory control of mobile sensors for localization, e.g., see [15,20,25].
Acknowledgments
This work was supported by the Commonwealth of Australia, through the Cooperative Research Centre for Advanced Automotive Technology (AutoCRC).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Abramovich, Y.; Spencer, N.; Gorokhov, A. Detection-estimation of more uncorrelated Gaussian sources than sensors in nonuniform linear antenna arrays .I. Fully augmentable arrays. IEEE Trans. Signal Process. 2001, 49, 959–971. [Google Scholar]
- Farina, A. Target tracking with bearing-Only measurements. Signal Process. 1999, 78, 61–78. [Google Scholar]
- Weng, Y.; Xie, L.; Xiao, W. Total least squares method for robust source localization in sensor networks using TDOA measurements. Int. J. Distrib. Sens. Netw. 2011, 2011, 172902:1–172902:8. [Google Scholar]
- Chia-Ho Ou, K.F.S.; Jiau, H.C. Range-free localization with aerial anchors in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2006, 2, 1–21. [Google Scholar]
- Stansfield, R. Statistical theory of DF fixing. J. IEEE 1947, 94, 762–770. [Google Scholar]
- Nardone, S.; Lindgren, A.; Gong, K. Fundamental properties and performance of conventional bearings-only target motion analysis. IEEE Trans. Autom. Control 1984, 29, 775–787. [Google Scholar]
- Foy, W. Position-location solutions by Taylor-series estimation. IEEE Trans. Aerosp. Electron. Syst. 1976, 12, 187–194. [Google Scholar]
- Wylie, M.; Roy, S.; Messer, H. Joint DOA estimation and phase calibration of linear equispaced (LES) arrays. IEEE Trans. Signal Process. 1994, 42, 3449–3459. [Google Scholar]
- Hoctor, R.; Kassam, S. The unifying role of the coarray in aperture synthesis for coherent and incoherent imaging. Proc. IEEE 1990, 78, 735–752. [Google Scholar]
- Dempster, A. Dilution of precision in angle-of-arrival positioning systems. Electron. Lett. 2006, 42, 291–292. [Google Scholar]
- Bishop, A.N.; Fidan, B.; Anderson, B.D.O.; Doğançay, K.; Pathirana, P.N. Optimality analysis of sensor-target localization geometries. Automatica 2010, 46, 479–492. [Google Scholar]
- Martinez, S.; Bullo, F. Optimal sensor placement and motion coordination for target tracking. Automatica 2006, 42, 661–668. [Google Scholar]
- Dogancay, K.; Hmam, H. Optimal angular sensor separation for AOA localization. Signal Process. 2008, 88, 1248–1260. [Google Scholar]
- Fogel, E.; Gavish, M. Nth-order dynamics target observability from angle measurements. IEEE Trans. Aerosp. Electron. Syst. 1988, 24, 305–308. [Google Scholar]
- Song, T. Observability of target tracking with bearings-only measurement. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1468–1472. [Google Scholar]
- Jauffret, C.; Pillon, D. Observability in passive target motion analysis. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1290–1300. [Google Scholar]
- Torrieri, D. Statistical theory of passive location systems. IEEE Trans. Aerosp. Electron. Syst. 1984, 20, 183–198. [Google Scholar]
- Dogancay, K. Online optimization of receiver trajectories for scan based emmiter location. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1117–1125. [Google Scholar]
- Bishop, A.N.; Pathirana, P.N. Optimal Trajectories for Homing Navigation With Bearing Measurements. Proceedings of the International Federation of Automatic Control World Congress, COEX, Seoul, Korea, 6–11 July 2008.
- Dogancay, K. Optimaized Path Planning for UAVs with AOA/SCAN Based Sensors. Proceedings of the 15th Europian Signal Processing Conference(EUSIPCO), Poznan, Poland, 3–7 September 2007.
- Kim, M.; Chong, N.Y. Direction sensing RFID reader for mobile robot navigation. IEEE Trans. Autom. Sci. Eng. 2009, 6, 44–54. [Google Scholar]
- Kim, M.; Kim, H.W.; Chong, N.Y. Automated Robot Docking Using Direction Sensing RFID. Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 4588–4593.
- Sundaram, K.; Mallik, R.; Murthy, U. Modulo conversion method for estimating the direction of arrival. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 1391–1396. [Google Scholar]
- Wong, K.; Zoltowski, M. Direction-finding with sparse rectangular dual-size spatial invariance array. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 1320–1336. [Google Scholar]
- Oshman, Y.; Davidson, P. Optimization of observer trajectories for bearings-only target localization. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 892–902. [Google Scholar]
- Kay, S. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice-Hall: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Wu, J.; Wang, T.; Bao, Z. Fast realization of maximum likelihood angle estimation with small adaptive uniform linear array. IEEE Trans. Antennas Propag. 2010, 58, 3951–3960. [Google Scholar]
- Liao, B.; Chan, S.C. Direction finding with partly calibrated uniform linear arrays. IEEE Trans. Antennas Propag. 2012, 60, 922–929. [Google Scholar]
- Hsu, Y.S.; Wong, K.; Yeh, L. Mismatch of near-field bearing-range spatial geometry in source-localization by a uniform linear array. IEEE Trans. Antennas Propag. 2011, 59, 3658–3667. [Google Scholar]
- Chan, C.Y.; Goggans, P. Using bayesian inference for linear antenna array design. IEEE Trans. Antennas Propag. 2011, 59, 3211–3217. [Google Scholar]
- Li, G.; Yang, S.; Nie, Z. Direction of arrival estimation in time modulated linear arrays with unidirectional phase center motion. IEEE Trans. Antennas Propag. 2010, 58, 1105–1111. [Google Scholar]
- Vertatschitsch, E.; Haykin, S. Impact of linear array geometry on direction-of-arrival estimation for a single source. IEEE Trans. Antennas Propag. 1991, 39, 576–584. [Google Scholar]
- Abramovich, Y.; Spencer, N.; Gorokhov, A. DOA estimation for noninteger linear antenna arrays with more uncorrelated sources than sensors. IEEE Trans. Signal Process. 2000, 48, 943–955. [Google Scholar]
- Herath, S.; Nagahawatte, C.; Pathirana, P. Tracking Multiple Mobile Agents with Single Frequency Continuous Wave Radar. Proceedings of the 2009 5th International Conference on Intelligent Sensors, Sensor Networks and Information Processing (ISSNIP), Melbourne, Australia, 7–10 December 2009; pp. 163–167.
- Irons, J.; Johnson, B.; Linebaugh, G. Multiple-angle observations of reflectance anisotropy from an airborne linear array sensor. IEEE Trans. Geosci. Remote Sens. 1987, GE-25, 372–383. [Google Scholar]
- Abramovich, Y.; Spencer, N.; Gorokhov, A. Detection-estimation of more uncorrelated Gaussian sources than sensors in nonuniform linear antenna arrays. II. Partially augmentable arrays. IEEE Trans. Signal Process. 2003, 51, 1492–1507. [Google Scholar]
- Bresler, Y.; Macovski, A. On the number of signals resolvable by a uniform linear array. IEEE Trans. Acoust. Speech Signal Process. 1986, 34, 1361–1375. [Google Scholar]
- Abramovich, Y.; Spencer, N.; Gorokhov, A. Resolving manifold ambiguities in direction-of-arrival estimation for nonuniform linear antenna arrays. IEEE Trans. Signal Process. 1999, 47, 2629–2643. [Google Scholar]
- Pal, P.; Vaidyanathan, P. Nested arrays: A novel approach to array processing with enhanced degrees of freedom. IEEE Trans. Signal Process. 2010, 58, 4167–4181. [Google Scholar]
- Herath, S.C.K.; Pathirana, P.N. Optimal Sensor Separation for AoA Based Localization Via Linear Sensor Array. Proceedings of the 2010 6th International Conference on Intelligent Sensors, Sensor Networks and Information Processing (ISSNIP), Brisbane, Australia, 7–10 December 2010; pp. 187–192.

© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Herath, S.C.K.; Pathirana, P.N. Optimal Sensor Arrangements in Angle of Arrival (AoA) and Range Based Localization with Linear Sensor Arrays. Sensors 2013, 13, 12277-12294. https://doi.org/10.3390/s130912277
Herath SCK, Pathirana PN. Optimal Sensor Arrangements in Angle of Arrival (AoA) and Range Based Localization with Linear Sensor Arrays. Sensors. 2013; 13(9):12277-12294. https://doi.org/10.3390/s130912277
Chicago/Turabian StyleHerath, Sanvidha C. K., and Pubudu N. Pathirana. 2013. "Optimal Sensor Arrangements in Angle of Arrival (AoA) and Range Based Localization with Linear Sensor Arrays" Sensors 13, no. 9: 12277-12294. https://doi.org/10.3390/s130912277