A Novel Crosstalk Suppression Method of the 2-D Networked Resistive Sensor Array


Abstract
: The 2-D resistive sensor array in the row–column fashion suffered from the crosstalk problem for parasitic parallel paths. Firstly, we proposed an Improved Isolated Drive Feedback Circuit with Compensation (IIDFCC) based on the voltage feedback method to suppress the crosstalk. In this method, a compensated resistor was specially used to reduce the crosstalk caused by the column multiplexer resistors and the adjacent row elements. Then, a mathematical equivalent resistance expression of the element being tested (EBT) of this circuit was analytically derived and verified by the circuit simulations. The simulation results show that the measurement method can greatly reduce the influence on the EBT caused by parasitic parallel paths for the multiplexers' channel resistor and the adjacent elements.1. Introduction
Miniaturized and integrated resistive sensor arrays were important for sensing applications, such as tactile sensing [1–8], temperature sensing [8,9], light sensing [10,11], photoconductive image sensing [12], olfactory sensing [13], etc. Speeter [1] reported a flexible sensing system with 16 × 16 resistive taxels and achieved a sampling rate of more than 60 Hz. Castellanos-Ramos et al. [3] reported a 16 × 16 tactile sensor array based on conductive polymers with screen-printing technology. Fernando et al. [4] realized and compared three circuits of networked piezoresistive sensor arrays based on standard microcontrollers, programmable systems on chip and field programmable gate arrays. Fernando et al. [5] designed a 16 × 9 force sensor patch to cover large areas of robots and machines for interacting with human beings. Zhang et al. [6] reported a 3 × 3 thin tactile force sensor array based on conductive rubber. Kim et al. [7] reported a new concept of a flexible tactile sensor array capable of sensing contact force and position with high performance and high spatial resolution. Yang et al. [8] designed a 32 × 32 flexible array using PI-copper films within a 160 mm × 160 mm temperature and tactile sensing area, which could be used to recognize big size objects with different shape. Wu et al. [9] designed an 8 × 16 networked array of resistive temperature tactile device within a 16 mm × 32 mm sensing area. Saxena et al. designed a 16 × 16 bolometer array of IR detector [10,11] and a 16 × 16 imaging array of light dependent resistor [12]. Beccherelli et al. [13] reported a polymeric chemical sensor array consisting of 65,536 sensors comprising tens of different types. Discrete resistive sensors with different spatial resolution were widely used in these sensor arrays.
For accessing all M × N elements individually in these resistive sensor arrays with the tradition methods, M × N × 2 connection lines were needed. For reducing the number of connection lines, many circuits of networked sensor arrays were proposed with all resistive elements having one end connected to a row line and the other end to a column line [1–13]. Thus the interconnect line number of M × N resistive array is M + N. However, the measurement accuracy of the element being tested (termed as EBT here after) was interfered [14] with the crosstalk effect for parasitic parallel paths in these resistive sensor arrays with the row-column fashion. Many methods have been proposed in literatures such as the voltage feedback methods [1,9], the zero potential methods [3–8,10–12], and the inserting diode method [2], etc. In these methods, the zero potential methods and the voltage feedback methods were applied widely. Regarding circuit simulations with the PSpice, D'Alessio [14] evaluated the scanning circuits of piezoresistive sensors arrays and gave several guidelines for using these circuits. Regarding mathematical analysis, Saxena [10–12,15] proposed a mathematical expression of the crosstalk among all of the elements introduced due to the interconnection overloading and then verified them in the circuit simulations with the CADENCE-SPECTRE or the PSpice. Liu et al. [16] analyzed the measurement errors of the voltage feedback method by the PSpice program simulation. Wu et al. [17] presented a mathematical analysis of the voltage expression for the measurement output of the EBT in the networked resistive sensor array. Wu et al. [18] also presented a mathematical expression of the effective equivalent resistance of the EBT in the Isolated Drive Feedback Circuit. For suppressing the crosstalk or reducing the total current drawn from the buffer in these methods, complexity circuits with many op-amps and multiplexers were used. Fernando et al. [5–7,19,20] suppressed the crosstalk caused by the adjacent row or column elements with large number of op-amps using part virtual ground (PVG) technique. D'Alessio et al. [3,4,8,14] suppressed the crosstalk caused by the adjacent elements and the multiplexers with larger number of op-amps using full virtual ground (FVG) technique. In these methods, the measurement accuracy of the EBT suffered from the interferences of some parasitic parameters, such as the different offset and bias of the op-amps, and the different on resistances of the mux [14]. Thus the crosstalk suppression method with less complexity can improve the measurement accuracy of the EBT. Wu et al. [21] suppressed the crosstalk caused by the adjacent column elements with a special feedback voltage using only one op-amp. However, in the method of [21], the adjacent row elements and the column multiplexers still significantly interfered over the crosstalk. Thus, better crosstalk suppression methods with less complexity and cost are desired.
For this purpose, we present a novel crosstalk suppression method with less complexity and cost for the 2-D networked resistive sensor arrays in the row-column fashion. This paper begins with an overview of the application fields and the measurement methods in the 2-D networked resistive sensor arrays. Secondly, a novel crosstalk suppression method will be proposed and its mathematical equivalent resistance expression of the element being tested will be analytically derived. Then simulations will be implemented to evaluate this method with different parameters such as the measurement range of the EBT, the multiplexers' resistor, and the array size of 2-D networked resistive sensor arrays. Finally, the results of experiments will be analyzed and conclusions for the method will be given.
2. Theoretical Analysis of Our Crosstalk Suppression Method
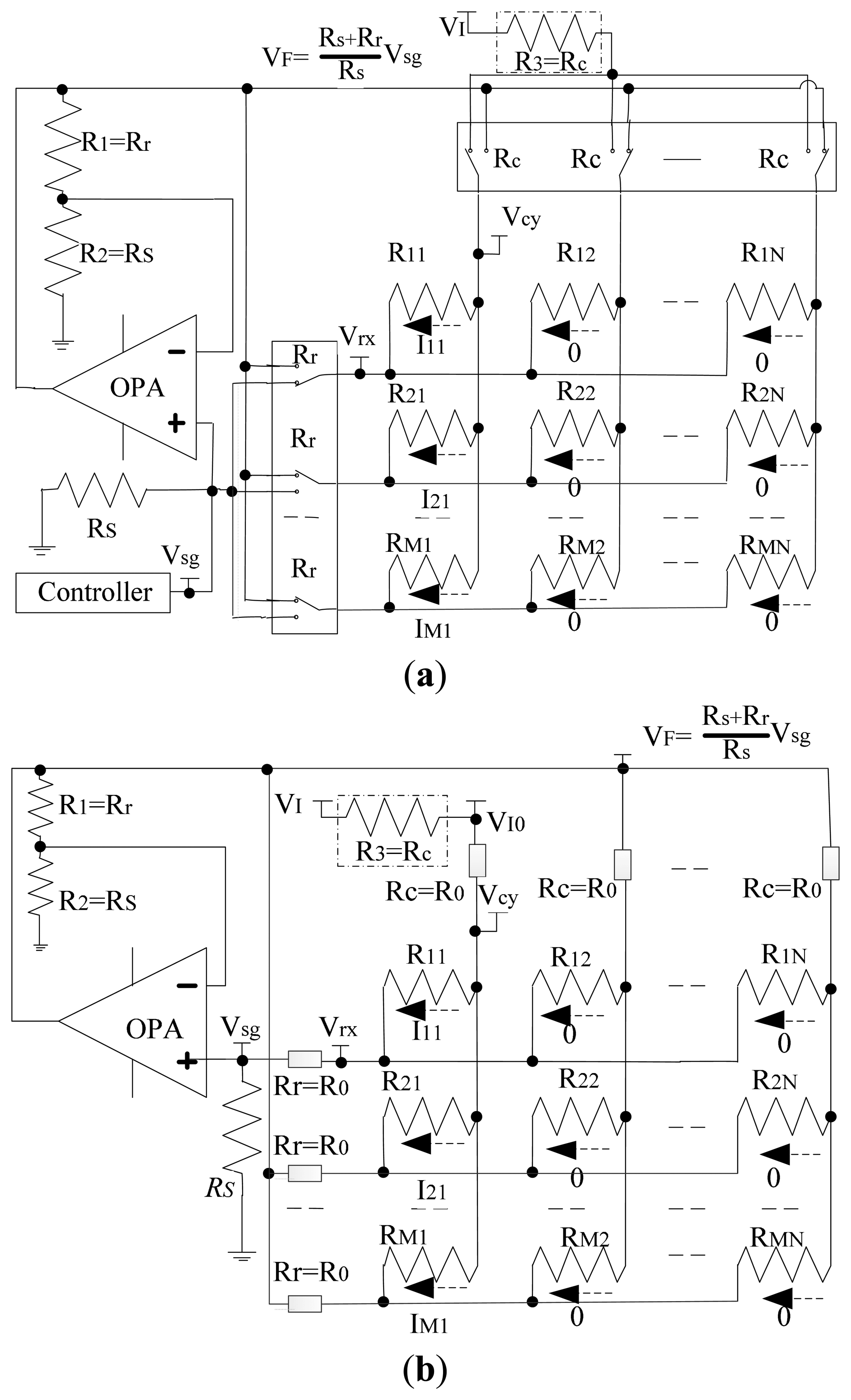
In the literature [9,12,16,21], voltage feedback methods were proposed with only one op-amp. So the offset and the bias of different op-amps were reduced. In the Isolated Drive Feedback Circuit (IDFC) [9], the resistance value of the EBT was measured individually. In the Improved Isolated Drive Feedback Circuit (IIDFC) [21], a special feedback unit was adopted for reducing the influence of the column adjacent elements, and then the feedback voltage (VF) was equal to the voltage on the scanning row (Vrx). Thus the currents of the column adjacent elements were approximated to zero, and the column adjacent elements and the channelresistors of the row multiplexers (Rr) had less influence on the EBT. However, the row adjacent elements and the channel resistors of the column multiplexers (Rc) still affected the measurement accuracy of the EBT. To have individual access of all resistors with a good measurement performance in the 2-D networked resistive sensor arrays, we propose using a novel crosstalk suppression method, which is based on the Improved Isolated Drive Feedback Circuit with Compensation (IIDFCC) of the column multiplexer resistor. We add another resistor (R3 = Rc as shown in the virtual box of the Circuit A in Figure 1a) to sample the current between the input voltage (VI) and the scanning column line. The resistance value of the scanning multiplex switch can be considered as a constant under the condition that the small tested current causes very little resistance change. Thus, Circuit A can be simplified to Circuit B as shown in Figure 1b where R11 is the element being tested.
If the column multiplexer is ideal without leak current and R3 is equal to Rc, the voltage of the scanning column line can be expressed as Equation (1):
From IIDFC [21], Vrx is equal to VF, so the current on the EBT is equal to the current on the sample resistor (Rs). Thus the equivalent resistance value of the EBT can be expressed as Equation (2):
As VI, Rs and Rr are known, VI0 and VF can be measured by ADC, so the equivalent resistance value (Rxy) of the EBT can be acquired.
3. Simulation Experiments and Discussion
Because the measuring temperature range of the small tactile device [9] was 10–50 °C, the resistance value of each sensitive element (NTC-103F950 thermistor of the SinoChip Electronic Co., LTD) was in the range[Rmin, Rmax], where Rmin = 3.6kΩ, and Rmax = 20 kΩ. The resistance value of the actual multiplexers was usually nonzero, and it could be 0.35–250 Ω [17]. To emulate the performance of our method, we simulated the 2-D networked resistive sensor array of the Circuit B with NI Multisim 12.
3.1. The Rxy Range Effect Simulation
When R0 was fixed, varied range of Rxy also affected the performance of the 2-D networked resistive sensor arrays. In the simulation, M = N = 8, R0 = 1 Ω or R0 = 10 Ω, all elements in sensor arrays and the sample resistor could vary synchronously with the resistance value in 100 Ω–7 MΩ. The simulation results of IDFC, IIDFC, and IIDFCC with NI Multisim 12 were shown in Figure 2.
From Figure 2, we found that IIDFCC had the minimum Rxy errors with the resistance value in the wide range of 100 Ω–7 MΩ among three kinds of circuits. While Rxy ≥ 1000Ω, IIDFCC with R0 = 10 Ω still had a better performance than IIDFC and IDFC with R0 = 1 Ω. Thus, IIDFCC has the best performance among three kinds of circuits in a wide range of Rxy.
3.2. The Multiplexers' Channel Resistors (R0) Effect Simulation
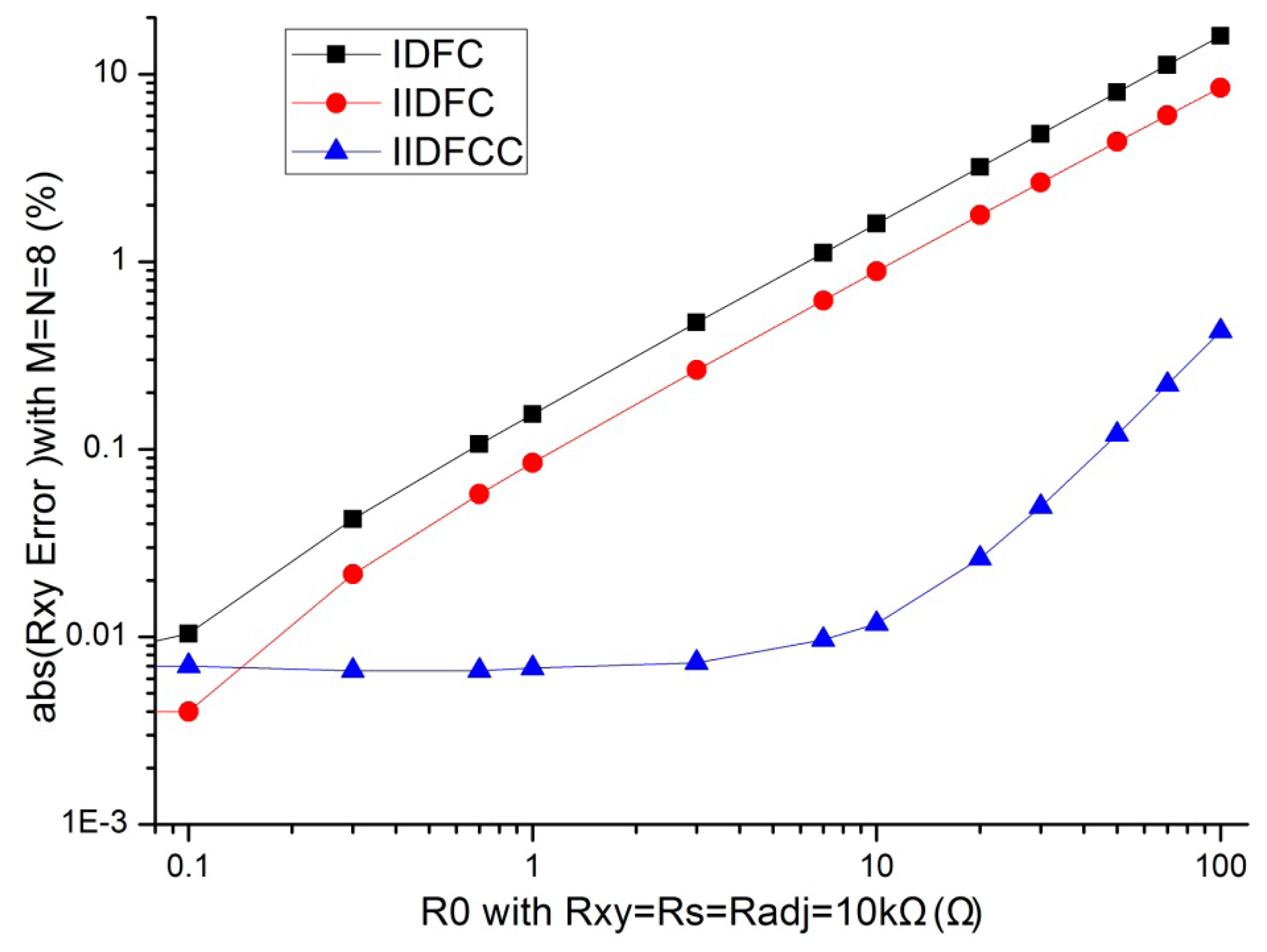
In evaluating the effect of the multiplexers' column channel resistors (Rc = R0) and the multiplexers' row channel resistors (Rr = R0) in our method, the other parameters were set to constant values. If R0 is zero, Rxy can be easily calculated. However, in an actual multiplexer, R0 is nonzero. We fixed M = N = 8 and the resistance value of the sample resistor and all elements in resistive sensor array at 10 kΩ, IDFC, IIDFC, and IIDFCC were simulated with NI Multisim12 with R0 varying in 0.10 Ω–100 Ω. The simulation results of measurement errors are shown in Figure 3.
From Figure 3, we found that, with the increasing of R0 in this simulation, the measurement values of IDFC and IIDFC were larger than the actual value whereas the measurement values of IIDFCC were less than the actual value; the Rxy errors of IDFC and these of IIDFC had a positive coefficient whereas the Rxy errors of IIDFCC had a negative coefficient. From Figure 3, we found that the absolute measurement errors of these three circuits increased with the increasing of the multiplexer's channel resistance value. When R0 was varied in 0.3Ω–100 Ω, the absolute measurement errors of IIDFCC were smaller than these of the other two circuits. Thus with our method, the Rxy error caused by the multiplexers' channel resistors can be reduced greatly. Furthermore, multiplexers with bigger channel resistance can be used in the 2-D networked resistive sensor arrays.
3.3. The Array Size Effect Simulation
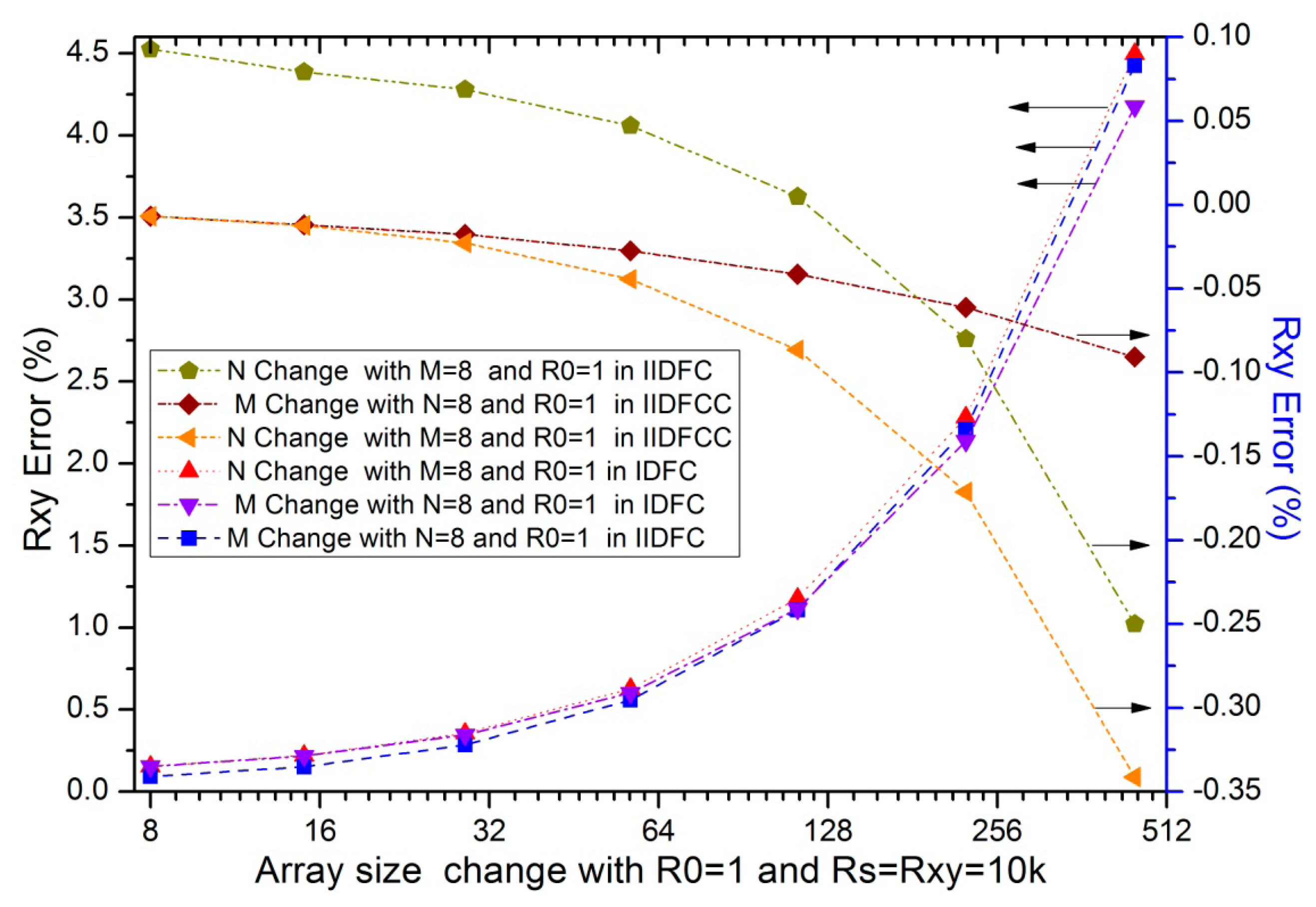
Parameters of the array size such as the row number (M) and the column number (N) were proved that it had approximated influences on the performance of the 2-D networked resistive sensor arrays [17]. The influence of the column number had been significantly reduced with large number of op-amps using virtual ground technique [19,20] and with one op-amp using IIDFC [21]. In simulations, we fixed some parameters including the resistance value of the sample resistor and all elements in resistive sensor array at 10 kΩ, M or N at 8, R0 at 1Ω, N or M was one of 8, 15, 29, 57, 113, 225, and 449. The simulation results of the array size effect of IDFC, IIDFC, and IIDFCC were shown in Figure 4.
As to the column number and the row number in IDFC and IIDFC, we found in Figure 4 that at least one parameter had a significant influence on their Rxy errors; with the increase of the column number or the row number in IIDFCC, we found that the absolute Rxy errors were reduced significantly compared with the other two circuits and the coefficient of its Rxy errors was negative. Thus, the influence of the array size on the Rxy error has been reduced greatly with our method.
3.4. The Adjacent Elements Effect Simulation
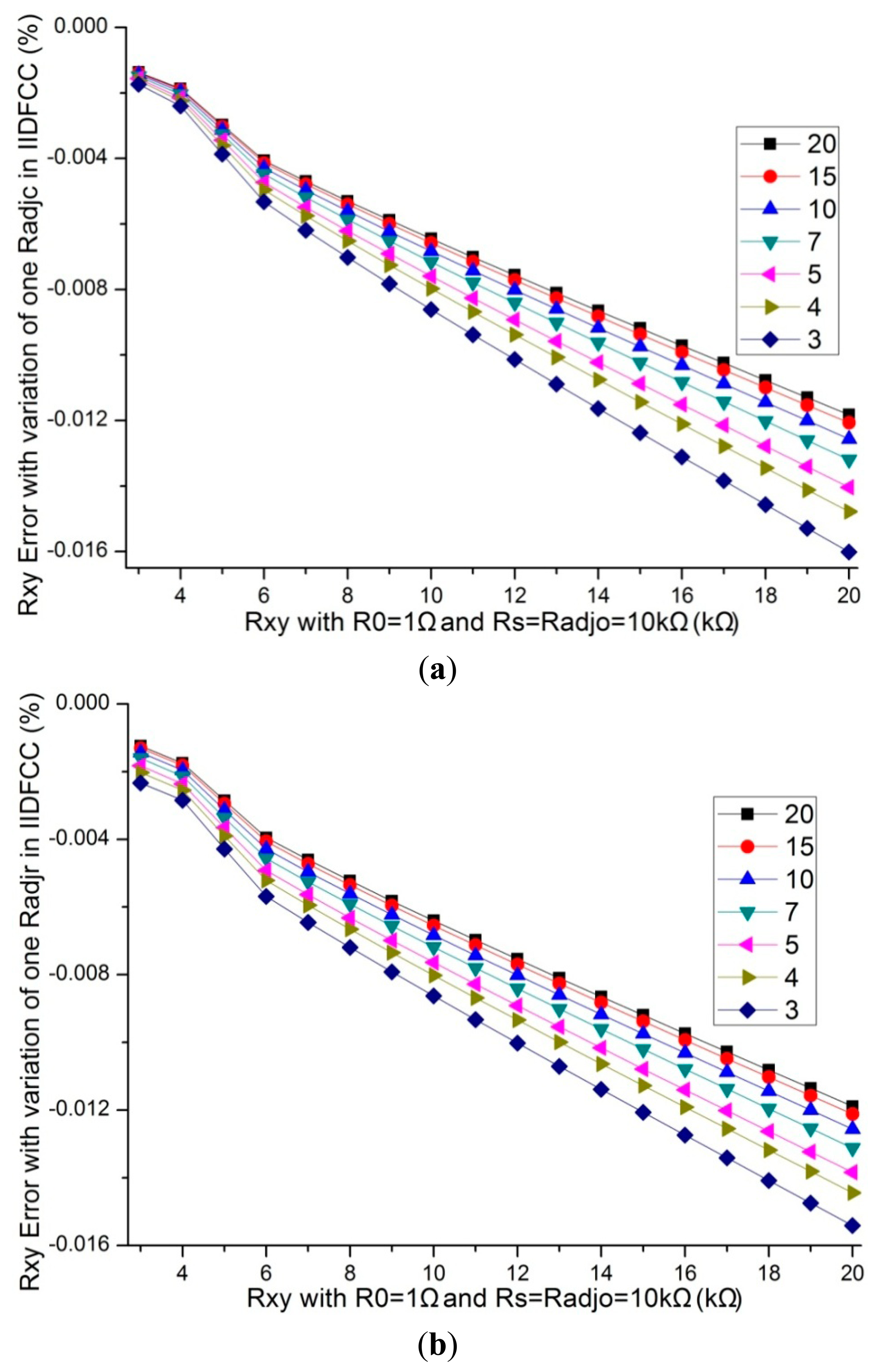
All other elements in resistive sensor arrays affected the measurement error of the EBT, in which the adjacent elements played a significant role [15,16]. We fixed the resistance value of non-scanned elements and all other adjacent elements (Radjo) at 10 kΩ, M = N= 8, R0 = 1 Ω, Rs =10 kΩ, the resistance value of one adjacent row element (Radjr) or one adjacent column element (Radjc), and the resistance value of the EBT varied in 3 kΩ–20 kΩ, the simulation results of IDFC [18], IIDFC [21], and IIDFCC with NI Multisim were shown in Tables 1 and 2, and Figure 5.
From Tables 1 and 2, and Figure 5, we found that the Rxy errors of IIDFCC were significantly smaller than those of IDFC and IIDFC; the adjacent row elements and the adjacent column elements had a similar influence on the Rxy errors in IIDFCC; with a same variation of one adjacent row element or one adjacent column element, the Rxy errors change of IIDFCC was the minimum one in these three circuits. Thus, IIDFCC has a better performance than IDFC and IIDFC for reducing the Rxy errors caused by the adjacent column elements.
3.5. Comparison with Other Methods
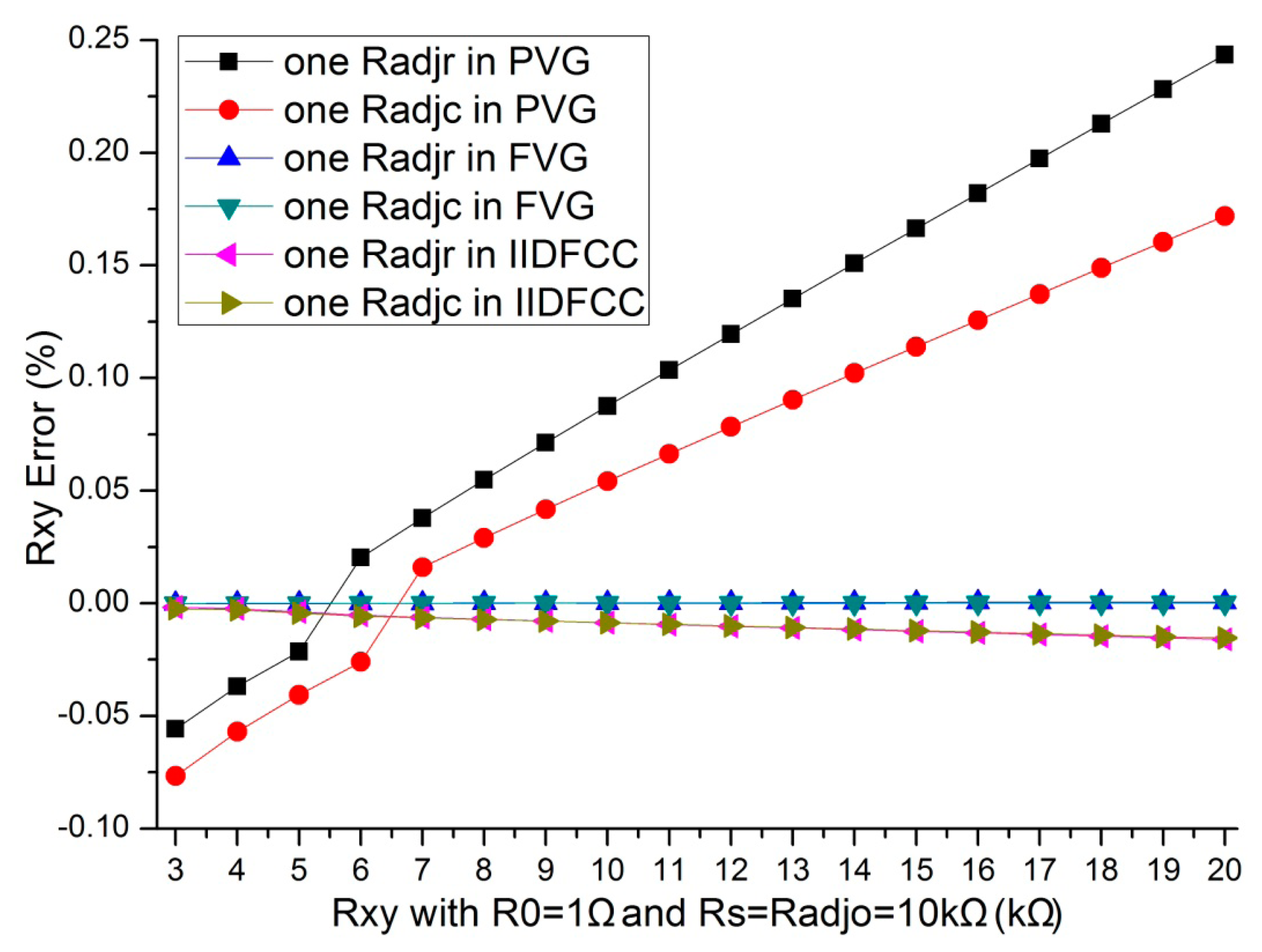
In [5–7,19,20], the part virtual ground (PVG) technology was used. In [3,4,8,14], the full virtual ground (FVG) technology was used. Under the similar condition as Section 3.4, we implemented simulations for comparing the crosstalk suppression method of IIDFCC with PVG method and FVG method. The simulation results were shown in Figure 6.
From Figure 6, we found that, the Rxy errors of the variation of one Radj were different in the three methods. The result of the method with PVG is the worst in the three methods. The crosstalk suppression method with IIDFCC is approximated to the crosstalk suppression method with FVG.
3.6. Discussion
Finally, Table 3 shows the comparison of the proposed method and other reported methods.
In our method, only one op-amp and M + N mux are used. So the method has the minimum complexity. For testing one element in the networked resistive sensor array, two analog-digital conversions are needed. So analog-digital conversions of 2(M × N) are necessary for scanning all elements in the networked resistive sensor array. Because the crosstalk caused by parasitic parallel paths for the multiplexers' channel resistor, the adjacent column elements, and the adjacent row elements were suppressed, this method has a good performance in the test accuracy of the EBT. So our method achieves a similar performance in the measurement accuracy as in the literature [3,4,8,14], while it has less complexity and less cost. In future work, we will implement a practical measurement on the proposed method.
4. Conclusion
Firstly, IIDFCC with one op-amp has been proposed to suppress the crosstalk for parasitic parallel paths in the 2-D resistive sensor arrays with the row–column fashion. Then, the equivalent resistance expression of the EBT in the networked resistive sensor array has been given. Subsequently, the effects of different parameters such as the multiplexer's channel resistors, the resistance range of the element being tested, the array size, and the adjacent elements on the measurement accuracy of the element being tested have been simulated with National Instrument Multisim 12. The simulation results show that, with our method, the resistance measurement error caused by the multiplexers' channel resistor, the array size, and parasitic parallel paths is reduced greatly. Furthermore, multiplexers with a bigger channel resistance can be used in the 2-D resistive sensor arrays.
Acknowledgments
This study was supported by the Specialized Research Fund for the Doctoral Program of Higher Education (No. 20130092110060). This study was also supported by the Chinese National Support Program (No. 2012BAI14B04), the Chinese Natural Science Foundation (No. 71101072), the Natural Science Foundation of Jiangsu Province (No. BK2012560), the Open Fund of the Key Laboratory of remote measurement and control technology in Jiangsu Province (Nos. YCCK201006, YCCK201401) and the Start Fund for Importing Personnel to NanJing Institute of Technology (No. YKJ201219).
Author Contributions
J. Wu and L. Wang conceived the idea and suggested the experiments to be conducted. J. Wu also wrote the final version of the paper, edited all the subsequent versions of the paper based upon the comments of the reviewers. L. Wang also executed the experiments, analyzed the data, and wrote the paper's draft. J. Li and A. Song supervised the work and helped editing the paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Speeter, T.H. A tactile sensing system for robotic manipulation. Int. J. Robot. Res. 1990, 9, 25–36. [Google Scholar]
- Prutchi, D.; Arcan, M. Dynamic contact stress analysis using a compliant sensor array. Measurement 1993, 11, 197–210. [Google Scholar]
- Castellanos-Ramos, J.; Navas-Gonzalez, R.; Macicior, H. Tactile sensors based on conductive polymers. Microsyst. Technol. 2010, 16, 765–776. [Google Scholar]
- Vidal-Verdu, F.; Oballe-Peinado, O.; Sanchez-Duran, J.A. Three Realizations and Comparison of Hardware for Piezoresistive Tactile Sensors. Sensors 2011, 11, 3249–3266. [Google Scholar]
- Vidal-Verdu, F.; Jose Barquero, M.; Castellanos-Ramos, J. A Large Area Tactile Sensor Patch Based on Commercial Force Sensors. Sensors 2011, 11, 5489–5507. [Google Scholar]
- Zhang, X.; Zhao, Y.; Zhang, X. Design and fabrication of a thin and soft tactile force sensor array based on conductive rubber. Sens. Rev. 2012, 32, 273–279. [Google Scholar]
- Kim, M.-S.; Shin, H.-J.; Park, Y.-K. Design concept of high-performance flexible tactile sensors with a robust structure. Int. J. Precis. Eng. Manuf. 2012, 13, 1941–1947. [Google Scholar]
- Yang, Y.-J.; Cheng, M.-Y.; Shih, S.-C.; Huang, X.-H.; Tsao, C-M.; Chang, F.-Y.; Fan, K.-C. A 32 × 32 temperature and tactile sensing array using PI-copper films. Int. J. Adv. Manuf. Technol. 2010, 46, 945–956. [Google Scholar]
- Wu, J.F.; Wang, L.; Li, J.Q.; Yu, Z.Z. A Small Size Device Using Temperature Sensor Array. Chin. J. Sens. Actuators 2011, 24, 1649–1652. (In Chinese). [Google Scholar]
- Saxena, R.S.; Bhan, R.K.; Jalwania, C.R.; Lomash, S.K. A novel test structure for process control monitor for un-cooled bolometer area array detector technology. J. Semiconduct. Technol. Sci. 2006, 6, 299–312. [Google Scholar]
- Saxena, R.S.; Panwar, A.; Semwal, S.K.; Rana, P.S.; Gupta, S.; Bhan, R.K. PSPICE circuit simulation of microbolometer infrared detectors with noise sources. Infrared Phys. Technol. 2012, 55, 527–532. [Google Scholar]
- Saxena, R.S.; Bhan, R.K.; Aggrawal, A. A new discrete circuit for readout of resistive sensor arrays. Sens. Actuators A Phys. 2009, 149, 93–99. [Google Scholar]
- Beccherelli, R.; Zampetti, E.; Pantalei, S. Design of a very large chemical sensor system for mimicking biological olfaction. Sens. Actuators B Chem. 2010, 146, 446–452. [Google Scholar]
- D'Alessio, T. Measurement errors in the scanning of piezoresistive sensors arrays. Sens. Actuators A Phys. 1999, 72, 71–76. [Google Scholar]
- Saxena, R.S.; Saini, N.K.; Bhan, R.K. Analysis of crosstalk in networked arrays of resistive sensors. IEEE Sens. J. 2011, 11, 920–924. [Google Scholar]
- Liu, H.; Zhang, Y.-F.; Liu, Y.-W.; Jin, M.-H. Measurement errors in the scanning of resistive sensor arrays. Sens. Actuators A Phys. 2010, 163, 198–204. [Google Scholar]
- Wu, J.F.; Wang, L.; Li, J.Q. VF-NSE Method Measurement Error Analysis of Networked Resistive Sensor Array. Sens. Actuators A Phys. 2014, 211, 45–50. [Google Scholar]
- Wu, J.F.; Wang, L.; Li, J.Q. A measurement error analysis of 2-D networked resistive sensor array circuit. 2014. submitted. [Google Scholar]
- Saxena, R.S.; Saini, N.K.; Bhan, R.K.; Muralidharan, R. Virtual Ground Technique for Crosstalk Suppression in Networked Resistive Sensors. IEEE Sens. J. 2011, 11, 432–433. [Google Scholar]
- Saxena, R.S.; Semwal, S.K.; Rana, P.S.; Bhan, R.K. Crosstalk suppression in networked resistive sensor arrays using virtual ground technique. Int. J. Electron. 2013, 100, 1579–1591. [Google Scholar]
- Wu, J.F.; Wang, L.; Li, J.Q. Design and crosstalk error analysis of the circuit for the 2-D networked resistive sensor array. 2014. submitted. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Up Limited Error (%) | Low Limited Error (%) | Maximum Variation (%) | ||||||
|---|---|---|---|---|---|---|---|---|
| IDFC | IIDFC | IIDFCC | IDFC | IIDFC | IIDFCC | IDFC | IIDFC | IIDFCC |
| 0.2255 | 0.1356 | −0.0014 | 0.1126 | 0.0705 | −0.0160 | 0.1129 | 0.0651 | 0.0146 |
| Up Limited Value (%) | Low Limited Value (%) | Maximum Variation (%) | ||||||
|---|---|---|---|---|---|---|---|---|
| IDFC | IIDFC | IIDFCC | IDFC | IIDFC | IIDFCC | IDFC | IIDFC | IIDFCC |
| 0.2238 | 0.1587 | −0.0012 | 0.1123 | 0.0653 | −0.0154 | 0.1115 | 0.0933 | 0.0142 |
| Literature | Complexity | Error Source | Scanning Times | Accuarcy | ||
|---|---|---|---|---|---|---|
| Nr. of Op-Amps | Nr. of Mux | Row or Column Adjacent Elements | Channel Resistor of Row or Column Mux | |||
| 1,7,9,11,12,17,18 | 1 | M + N | both | both | M × N | good |
| 5–7,19,20 | N or M | M + N | both | both | M or N with N or M ADC | good |
| 21 | 1 | M + N | row or column | row or column | M × N | better |
| proposed | 1 | M + N | none | none | 2(M × N) | Much better |
| 8,14 | M + N | M + N | none | none | M × N | best |
| 3,4 | M + N | M | none | none | M with N ADC | best |
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Wu, J.; Wang, L.; Li, J.; Song, A. A Novel Crosstalk Suppression Method of the 2-D Networked Resistive Sensor Array. Sensors 2014, 14, 12816-12827. https://doi.org/10.3390/s140712816
Wu J, Wang L, Li J, Song A. A Novel Crosstalk Suppression Method of the 2-D Networked Resistive Sensor Array. Sensors. 2014; 14(7):12816-12827. https://doi.org/10.3390/s140712816
Chicago/Turabian StyleWu, Jianfeng, Lei Wang, Jianqing Li, and Aiguo Song. 2014. "A Novel Crosstalk Suppression Method of the 2-D Networked Resistive Sensor Array" Sensors 14, no. 7: 12816-12827. https://doi.org/10.3390/s140712816