Estimation of Spatial-Temporal Gait Parameters Using a Low-Cost Ultrasonic Motion Analysis System

Abstract
: In this paper, a low-cost motion analysis system using a wireless ultrasonic sensor network is proposed and investigated. A methodology has been developed to extract spatial-temporal gait parameters including stride length, stride duration, stride velocity, stride cadence, and stride symmetry from 3D foot displacements estimated by the combination of spherical positioning technique and unscented Kalman filter. The performance of this system is validated against a camera-based system in the laboratory with 10 healthy volunteers. Numerical results show the feasibility of the proposed system with average error of 2.7% for all the estimated gait parameters. The influence of walking speed on the measurement accuracy of proposed system is also evaluated. Statistical analysis demonstrates its capability of being used as a gait assessment tool for some medical applications.1. Introduction
The significance of spatial-temporal gait parameters measurement has been addressed in many research papers [1–3]. The quantitative analysis of such gait parameters can be helpful to diagnose impairments in balance control [4], monitor the progress in rehabilitation [5], and predict the risk of falling [6,7]. Such parameters include stride length, walking velocity, stride cadence, stride duration and asymmetry of stride. In particular, stride asymmetry has been shown to be more indicative of the underlying impairments and walking stability [8,9]. Therefore, having instruments that are capable of measuring these gait parameters about the patients' walking ability is useful in many clinical applications [10].
The most commonly employed method for gait analysis involves the use of multi-camera motion capture system and force plates, which is capable of measuring ground reaction forces and tracking the 3-dimensional positions of reflective markers [11]. However, measurements using this system require specialized laboratories, complex calibration and expensive equipments [12], which makes it ill-suited for routine applications. Moreover, it is sensitive to changes in lighting, clutter and shadow [13,14].
Many motion analysis systems using non-traditional methods have been proposed over the last decade [11]. These systems, for example, use wearable force sensors to measure the ground reaction force for the estimation of foot dynamics and centre of mass displacement [1,15,16]. Even X-ray is used to measure the 3-dimensional body segment parameters for gait analysis [17]. Since in many applications it is desirable to monitor human body motion in various environments, some portable and low-cost systems are preferred.
Inertial/magnetic systems are becoming more popular due to their low cost, small form factor and easy implementation [12]. However, when it comes to the estimates of foot displacements, double integration of measured accelerations is needed to get the displacement or position information. Unfortunately, it is difficult to obtain accurate motion accelerations because of the presence of sensor bias and measurement noise, which leads to the exponential increase of displacement error over integration time [18]. This issue can be mitigated either by applying some techniques to correct it periodically, such as zero velocity update (ZUPT), or by applying Kalman filter [19], or by combining with other sensors, such as imaging sensors, Radio Frequency identification (RFID) technology, or ultra-wide band (UWB) technique [20–23]. These mentioned hybrid motion tracking systems can improve the tracking accuracy, but with an increased cost, complexity of experiment installation and maintenance.
Ultrasonic sensors are among the most commonly used techniques in gait analysis due to its safety, low cost, and high accuracy and resolution for low range measurement. There are two types of ultrasonic transceivers, one relies on reflection from the surface, as the one used in [24,25]. The distance measurement of such ultrasonic sensor is the returned distance reflected from the ground, and the orientation of foot during walking is not considered. Therefore, it is not the vertical distance being measured. The other one is with ultrasonic transmitter and receiver on separate circuit boards using direct line of sight. The synchronization clock between transmitter and receiver is provided by an RF module [26,27]. There are only two receivers used in [26,27], which only measures one directional displacement, i.e., displacement in the direction of progression.
In our paper, a wearable wireless ultrasonic sensor system for estimating 3-dimensional displacement to extract spatial-temporal gait parameters is developed. As compared with [26,27], the proposed system can measure not only the displacement in the direction of progression, but also the foot clearance, which occurs in the vertical direction and is an important parameter that is critical to the description of upright stability [5]. Additionally, the proposed ultrasonic motion analysis system is designed to allow patients to be monitored in an unconstrained environment. To reduce the usage of wires, we used the wireless sensor network concept with all the sensor nodes communicating to the coordinator wirelessly. Furthermore, the ultrasonic sensor node placed on human body is light and small. Additionally, the proposed motion analysis system is low-cost compared with the camera-based motion analysis system.
2. Related Work
The tracking techniques for locating a mobile device's position are studied using many approaches [28–30]. There are two major localization and tracking techniques, Receiver-Synchronization relative measurement (RS) and Global-Synchronization absolute range measurement (GS) [30]. RS range measurement only requires anchors to be synchronized and Time-Difference-of-Arrival (TDOA) technique is used for tracking and localization. In GS range measurement, both the mobile and the anchors are synchronized and the absolute distance can be estimated using Time-of-Arrival (TOA) technique. In our system, we prefer higher tracking and localization accuracy to accurately measure spatial-temporal gait parameters. Thus, we used the TOA-based tracking technique because the TDOA-based tracking technique has worse performance. RF signals are used in our system for synchronization between the anchors and the mobile. RF signal travels at the speed of light and the time it takes to reach mobile target is almost instantaneous and can be considered zero since the speed of ultrasound in air is much lower [31].
Under ideal range measurement case, an analytical localization method called trilateration, which uses only distance measurements, can be applied to identify the position of the mobile. For TOA-based localization technique, the target can be located at the intersecting point of several cycles that are formed by these anchors with known positions and distances to the mobile [31]. However, for a mobile target, it is not easy to track or localize because the range measurements are noisy and fluctuate, since the mobile can be located at anywhere in overlapped regions of such circles rather than being located at a single point at the intersection of the circles.
It is therefore desired to have accurate tracking and localization methods capable of filtering out the range measurement noises. One of the representative nonlinear state estimators is the least square (LS) method, which first transforms the nonlinear equations into linear ones and then solves the linear equations by LS-based estimator. Although the computation of this method is efficient, the tracking accuracy may not be sufficient [32]. Another typical method is proposed in [33], which begins with an initial guess and then applies least sum squared error to solve the nonlinear equation recursively. Although it provides better tracking performance, the initial guess should be carefully selected to guarantee the convergence of the iteration [34]. Therefore, many researchers proposed other methods to enhance the positioning performance. One representative implementation of indoor sensor network used to track a mobile is the Cricket of MIT [35,36]. It employs a hybrid approach involving the use of an Extended Kalman Filter (EKF) and Least Square Minimization to enhance the tracking and localization performance. EKF is the most commonly used nonlinear state estimator using the first or second order terms of the Taylor series expansion, which is most appropriate when the noise statistics is Gaussian distribution, to linearize the state and observation models [37]. Therefore, for some highly nonlinear dynamics, the linearization of EKF insufficiently characterizes the relationship. Therefore, we use Unscented Kalman Filter (UKF) to overcome such limitations of EKF, i.e., the requirement for the noises to be Gaussian and the poor linearization of first or second order approximation. We will explain the tracking algorithm in more detail in the following section.
3. Methods
3.1. Ultrasonic Sensor System
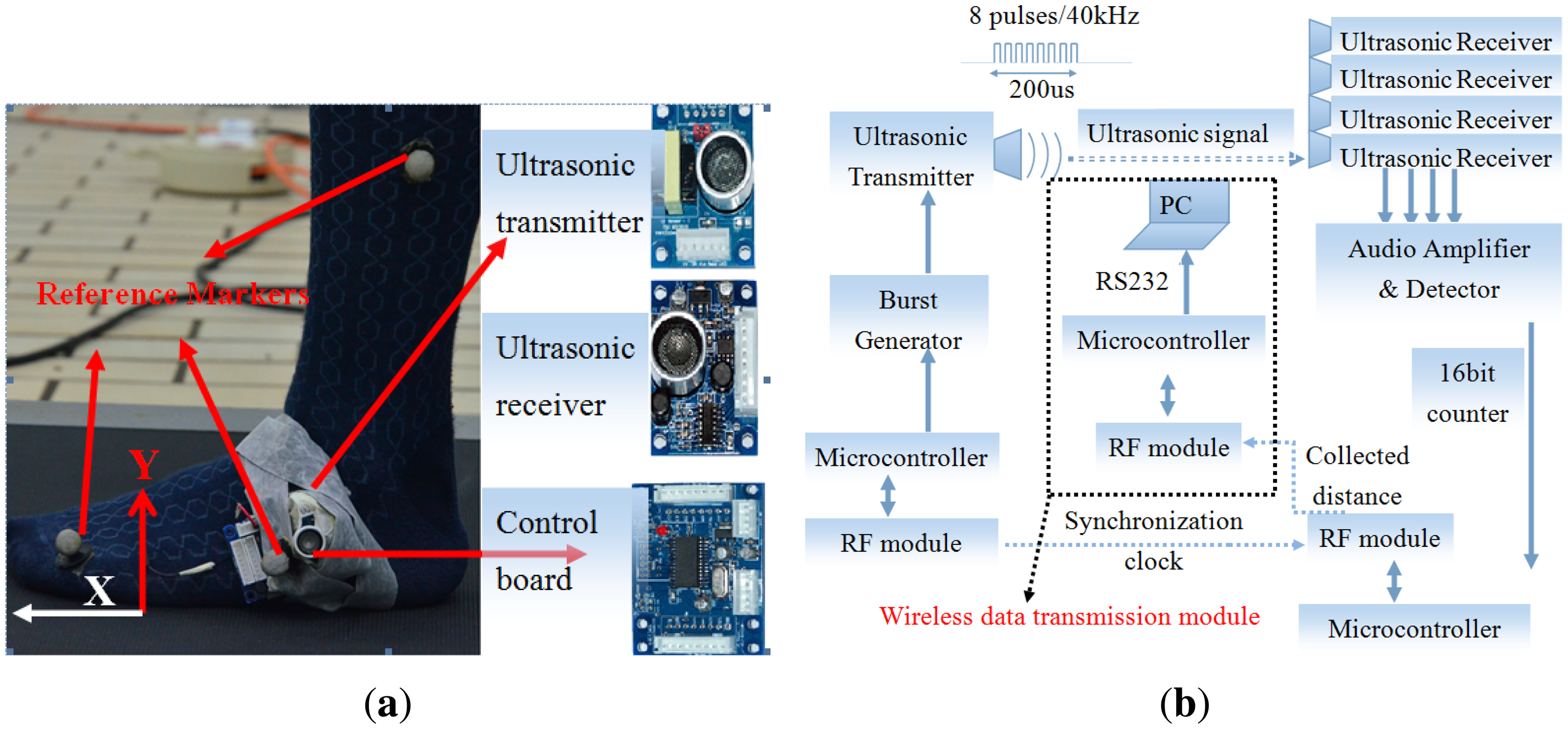
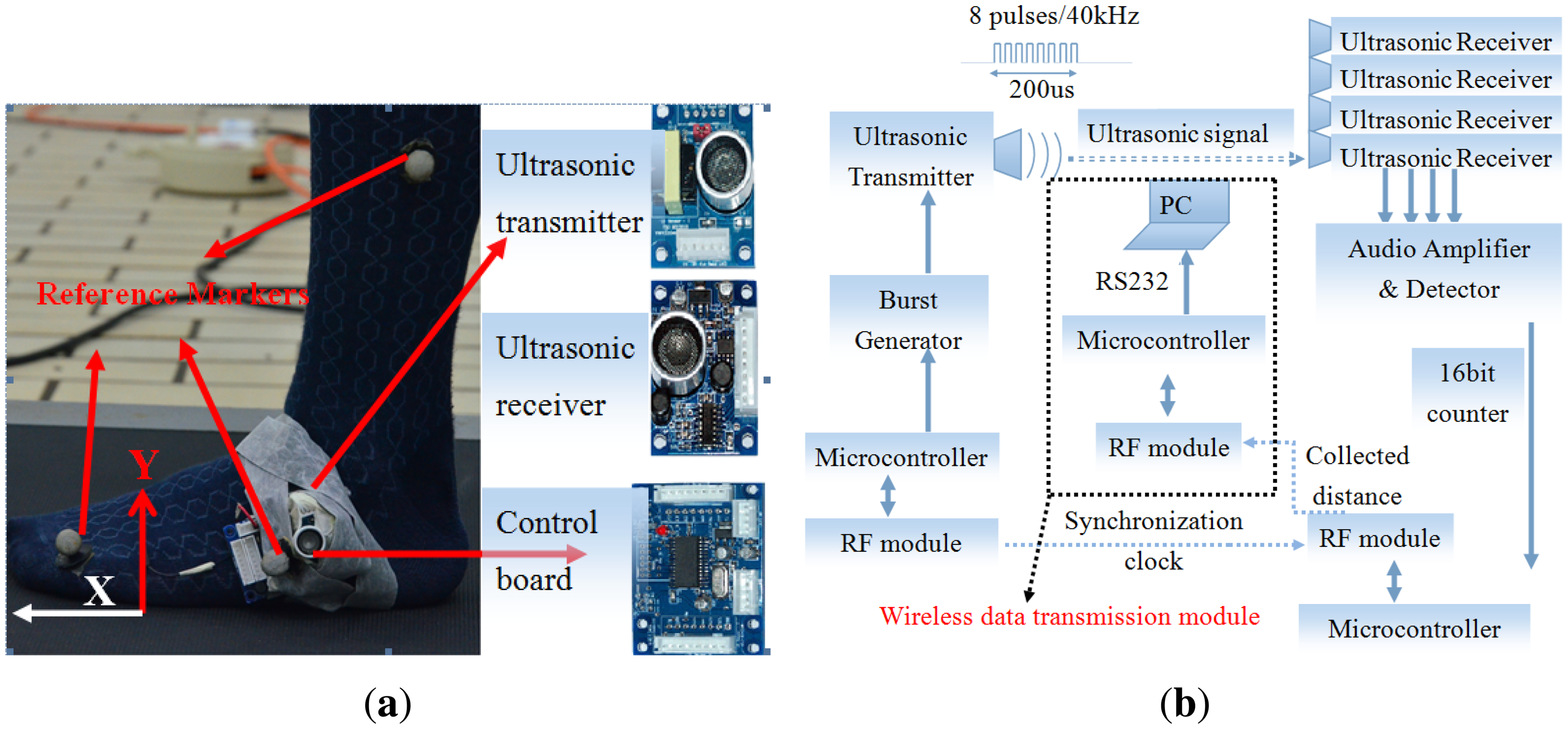
The acquisition system that we developed for wearable gait analysis uses the wireless sensor network concept, with all mobile nodes communicating wirelessly with the coordinator to enable patients to be monitored in unconstrained environment, as shown in Figure 1. The proposed measurement system consists of one ultrasonic transmitter (referred to as the mobile with form factor: 4 cm × 3 cm × 1.6 cm) and four ultrasonic receivers (referred to as the anchors with the same form factor) made by Embedream studio, China [38]. The foot displacements measured using the TOA-based tracking technique were expressed in a global coordinate system that described foot position relative to the ground, as shown in Figure 1a. The X-axis was defined as the direction of progression, i.e., anterior-posterior direction, and the Y-axis was defined as the vertical direction. The third axis of the coordinate system, i.e., the Z-axis, was determined in such a way to form a right-handed coordinate system. However, for healthy subjects, the 2-dimensional model is sufficient to obtain spatial-temporal gait parameters, because the sagittal plane is the plane where the majority of movements take place.
Figure 1b shows the configuration of the ultrasonic measurement system. A battery-powered ultrasonic transmitter node is attached to the heel of the subject's foot. The mobile sensor node establishes communication with the coordinator node through a low power 430 MHz RF transceiver RFM12B. The coordinator node is also wirelessly communicating with the computer through a wireless data transmission module. The wireless data transmission module forwards all collected information to a personal computer through RS232 cable for postprocessing.
In the system, ultrasonic range measurements are initiated by a periodic trigger input with a pulse duration of 10 μs. Then, the ultrasound transmitter is triggered to produce an ultrasonic burst consisting of 8 pulses with a frequency of 40 kHz. Meanwhile, the RF module on the mobile node is triggered synchronously, thus sending out a data package with a timer starter command (TSC) using broadcast address to notify the anchors that an ultrasound signal has been transmitted. Once the anchor receives TSC, it will start its 16-bit counter to record the propagation delay from the mobile to the anchor. The transmission time of the RF signal from the mobile is negligible, since the speed of light is much faster than the speed of ultrasound. The 16-bit counter will stop counting immediately after each of the transmitted burst is detected by the anchor. Then the counted steps will be converted to propagation delay by multiplying the time resolution (instruction cycle) of the microcontroller. From this delay, the distance between the mobile and the anchor can be calculated by:
3.2. Tracking Algorithm
In this section, we first explain how to establish a state space of nonlinear system to estimate the state of the moving target. Next we will apply UKF to enhance the performance of the tracking technique.
3.2.1. Motion and Measurement Model
The mobile target in 3-dimensional field is represented by its position and velocity in X-Y-Z plane:
Let dik denote the measured distance at the ith anchor using the equation:
3.2.2. Unscented Kalman Filtering
The aforementioned state space model is a nonlinear dynamical system to the measurement distances and the state of foot motion. The approximation of UKF is to find a transformation that captures the mean and covariance of state random variable of length n through a nonlinear function [39]. We summarize the algorithm as follows.
For each time step k, start from and Pk/k,
Generate sigma points3. Update
Compute the a-priori statistics
Update
Compute the Kalman gain
Compute the a-posteriori statistics
W is the associated weight matrix:
Parameter λ is the scaling factor, which is defined as:
3.3. Gait Parameters Estimation
3.3.1. Autocorrelation Procedure
The idea of analyzing gait data by autocorrelation procedure is first proposed by Barrey et al. [40] and Auvinet et al. [41]. Then, the difference between biased and unbiased autocorrelation procedure for gait data analysis has been discussed by Moe et al. [9]. Here we summarize the autocorrelation procedure as follows.
The autocorrelation coefficient shows the degree of similarity between the given observations ai (i = 1,2,…,N) as a function of the time lag over successive time intervals, as given by:
As discussed in [9], either biased or unbiased autocorrelation coefficient can be computed for gait data analysis, but biased autocorrelation is not suitable for comparing autocorrelation coefficient over different time lags. The biased autocorrelation is the result of the raw autocorrelation coefficient A divided by the number of the observations in Equation (14):
In Equation (15), the denominator N is the number of samples in observation ai, which is independent of the time lag m. It means that the number of samples in the numerator will decrease as the time lag m increases, and then the autocorrelation coefficient will attenuate. However, this is not the case in unbiased autocorrelation estimator, expressed as:
Since the number of terms in the numerator N − m is always equal to the value of the denominator, there is no noticeable attenuation in the unbiased estimator.
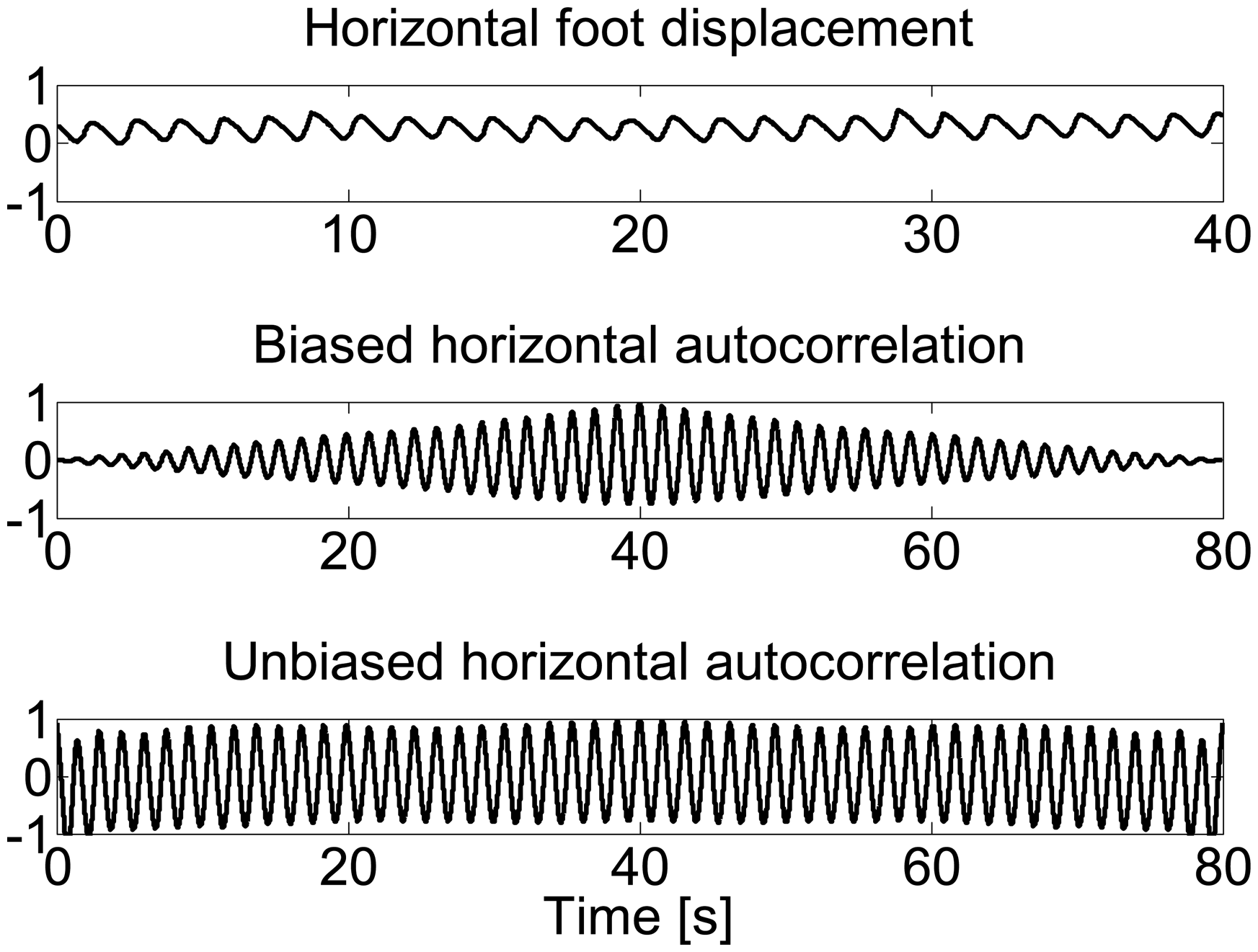
Figure 2 shows the two different estimators for horizontal displacement during treadmill walking. The biased estimator shows clear periodicity but with attenuated amplitudes, while the unbiased estimator introduces no obvious attenuation except a deteriorated curve at the tails.
3.3.2. Estimation of Stride Regularity and Symmetry
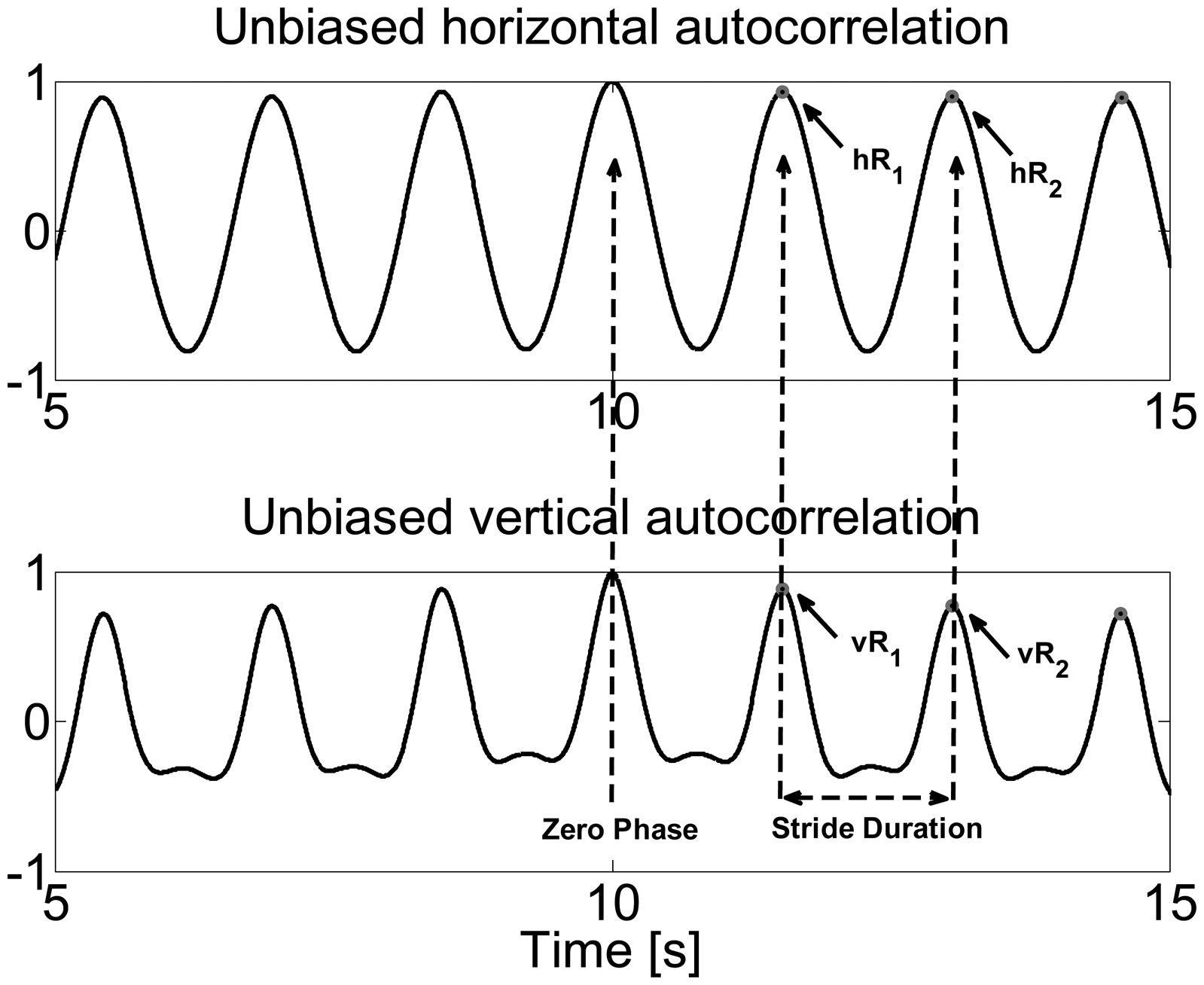
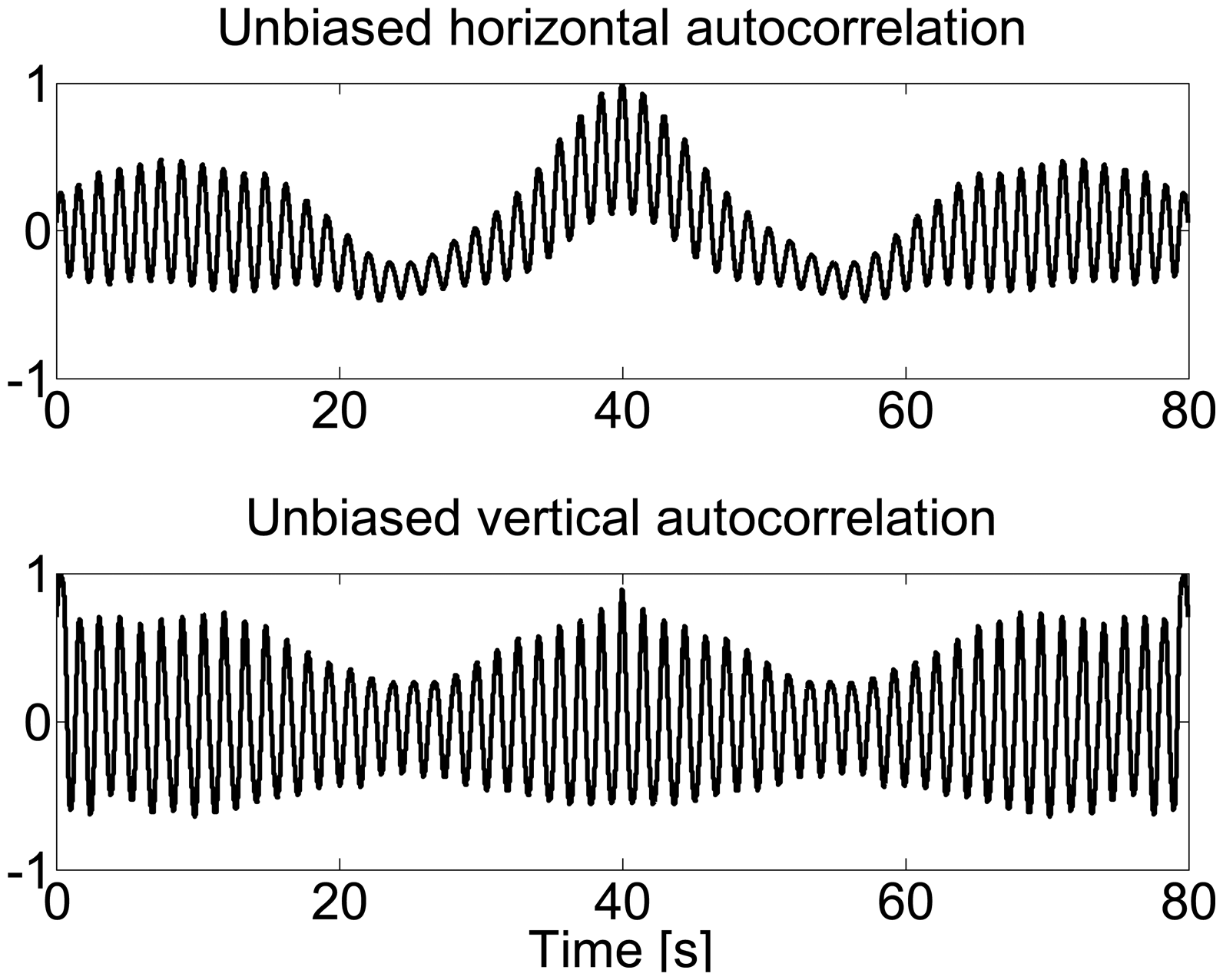
Figure 3 shows the normalized unbiased autocorrelation of horizontal and vertical foot displacement during treadmill walking. Since the first peak from the zero phase represents a phase shift of one stride duration, the autocorrelation coefficient at the periodic phase shift is defined as the regularity of the stride between neighboring strides, referred to as hRi for horizontal displacement and νRi for vertical displacement. Therefore, either for horizontal or vertical displacement, the closeness of hRi+1/hRi or νRi+1/νRi reflects the stride symmetry. Figure 4 demonstrates an example of asymmetric gait showing the unbiased autocorrelation sequence of the horizontal and vertical displacements.
3.3.3. Estimation of Gait Parameters
From the estimated foot displacements by the proposed algorithm, the following spatial-temporal gait parameters can be obtained. With respect to the jth gait cycle, the estimators of the spatial-temporal gait parameters are as follows:
Stride Length, S:
where the functions Max(x) and Min(x) return the maximum and minimum value of the variable x, and xj is the horizontal displacement in the jth gait cycle;Normalized Stride Length, NS:
where NS is defined as the stride length normalized by the number of strides n;Stride Duration, T:
where the function Index(max(xj)) returns the location of the maximum value in xj;Stride velocity, V:
Normalized Velocity, NV:
where the normalized speed is the speed as percentage of the number of strides n;Cadence, C:
where the cadence is the number of strides in a second.
4. Experimental Validation
4.1. Experiment Setup
The proposed method was tested on 10 healthy subjects (age 25.7 ± 1.4 years, height 171.4 ± 6.5 cm, and weight 62.8 ± 5.6 kg) walking 5 min on a treadmill at slow, normal, and fast walking speeds, the results of which are presented in this paper. The subjects were recruited from students of Nanyang Technological University and none of them had a history of pathological gait disorders. To provide a more systematic validation, we conducted the experiments in a motion analysis lab with eight high speed cameras (Motion Analysis Eagle System, Santa Rosa, CA, USA) in the School of Mechanical and Aerospace Engineering at Nanyang Technological University. The Motion Analysis Eagle System consists of Eagle Digital Cameras and Cortex software, which captures complex 3D motion with extreme accuracy. System calibrations of the reference system should be done at both static (with 4-point calibration L-frame) and dynamic process (with 3-point calibration wand) to ensure an acceptable accuracy of the reference system. In our experiments, the accuracy of the reference system is 0.43 ± 0.18 mm (Average ± Standard deviation).
Figure 1a shows the placement of ultrasonic sensor and reflective markers on the test subject's foot. There were four anchors used in our experiment with positions p1 = [0 0 0]T, p2 = [0.324m 0 0]T, p3 = [0.324m 0.230m 0]T, p4 = [0 0.230m 0]T. The ultrasonic transmitter was attached to the heel of the foot pointing towards the four anchors, using elastic straps. In our method, only one ultrasonic sensor (transmitter) is needed to attach to the foot, which minimizes user discomfort and avoids complex calibration procedures and synchronization issues. All data transmission between anchors, coordinator and transmitter are done wirelessly through the RF module. Therefore, it does not restrict the movement of subjects. The ultrasonic sensor data were acquired at 50 Hz. Data from the reference system were captured at 200 Hz. The difference between the sampling rate of these two systems was compensated by linear interpolation. All data were low-pass filtered by second order low-pass Butterworth filter at 10 Hz.
4.2. Processing of Measured Data
In order to compare the estimated spatial-temporal gait parameters at each recorded gait cycle, the foot trajectory estimate with proposed ultrasonic sensors was temporally delayed to match the trajectory estimated by the camera reference system, by finding the maximum values of cross-correlation between these two trajectories. To quantify the performance of the proposed system against the camera reference system, the mean and standard deviation (std) were calculated on the datasets of difference, as well as the Root Mean Square Error (RMSE). This is followed by using the analysis of variance (ANOVA) to test differences in the means of the ten subjects for statistical significance. Finally, walking speed was estimated using the proposed ultrasonic sensor configuration to check significant changes over different speeds. Two-sample t-tests were performed on the walking velocity and the extracted gait parameters to assess the significance of change in these gait parameters with speed, and thus investigate the effect of walking velocity on the difference between the proposed system and the reference system in gait parameters estimation.
4.3. Parameters Identification
As the system modelling we have adopted in Section 3.2.1., the process and measurement noise statistics should be estimated. A wooden pendulum was constructed using a uniaxial pivot so that it swung through an arc [42]. The ultrasonic transmitter was placed at the end of this pendulum, and a reflective marker was also located approximately in alignment with the ultrasonic transmitter head. The pendulum was raised up at an angle and allowed to drop freely until it came to a stable position. This action was repeated M times. The experiment helps to find suitable values of process noise W and measurement noise V. The measurements from camera system, ri, are referred to as the actual distance for test i, and there are N measurement samples collected for each test, where j = 1, …, N.
4.3.1. Process Noise Statistics in Kalman Filter
As the process noise in UKF is an independent variable, it is difficult to get an exact value [31]. Here, we consider it as a velocity noise in X, Y and Z directions in mm/s. The process noise W was estimated using numerical methods. By varying the values of σ wx, σ wy and σ wz, we will get the corresponding trajectory of the mobile to compute the RMSE value. Typical values of σ wx, σ wy and σ wz will be selected when their corresponding RMSE is minimal. The typical values of W used in our experiments are σ wy = 30, σ wy =25, σ wy = 10.
4.3.2. Measurement Noise Statistics in Kalman Filter
It is reasonable to assume that all anchors have independent distributed noise. Then, the mean and covariance of the measurement noise can be evaluated by the pendulum experiments. Using the data obtained from the specific experiments, straightforward calculations lead to the estimation of mean and variance of the measurement errors
Typical value of V used in our experiments is V = diag(11, 9.3,9, 9) with the units as mm2. In other words, the accuracy of distance measurement by each ultrasonic sensors is around 3 mm.
The results of pendulum experiment have been shown in Table 1. The Net RMSE is defined as . The difference between the two systems was obtained with an RMSE value of 4.08 mm in horizontal direction (X), 0.72 mm in vertical direction (Y) and 1.08 mm in lateral direction. The Net RMSE value of 4.28 mm in 3D space of UKF estimator is achievable in the pendulum model.
4.4. Results
4.4.1. Performance Comparison
The mean and standard deviation in stride length, stride duration, and stride velocity estimation between the proposed system and the reference system together with RMSE value are reported in Tables 2 and 4 for all subjects walking at normal speed. On average, across all subjects, the estimates of stride length from the proposed method were 0.001 m less than the reference measurements. The overall RMSE value is about 0.027 m, which is 2.3% of the mean estimated stride length of the reference system. The mean and standard deviation of stride duration at normal walking speed is reported as 1.18 ± 0.02 s by the reference system and 1.18 ± 0.04 s by the proposed system, which shows no mean difference between the two systems. The average error across all subjects of RMSE of the estimated stride duration is 0.035 s with 3% percent error. The mean and standard deviation in the estimation of the stride velocity is reported in Table 4, which shows that the proposed method slightly overestimated the stride velocity by 0.001 m/s with an RMSE value of 0.036 m/s, occupying 3.6% of the proposed estimates of stride velocity.
We have elaborated how gait cycle periodicity of foot displacement data can be used to extract stride regularity and symmetry by unbiased autocorrelation procedure in Section 3.3.2. Tables 5 and 6 show the mean and standard deviation of the reference system and the proposed system together with RMSE values in detecting horizontal and vertical stride symmetry respectively for each subject. The mean and standard deviation data of horizontal stride symmetry are 1.001 ± 0.021 by the reference system and 0.999 ± 0.027 by the proposed system, which shows that the ultrasonic-based horizontal stride symmetry was underestimated by a negligible error of 0.002. An RMSE of 0.013 with 1.3% percent error is also reported for the estimates of horizontal stride symmetry across all subjects. In the contrary, the ultrasonic-based vertical stride symmetry was overestimated by 0.007, where the RMSE value is 0.034 with a percent error of 3.5%. In summary, all the numerical results show a clinically acceptable accuracy of the proposed system with an average percent error of 2.7% for all the estimated gait parameters.
4.4.2. Statistical Analysis
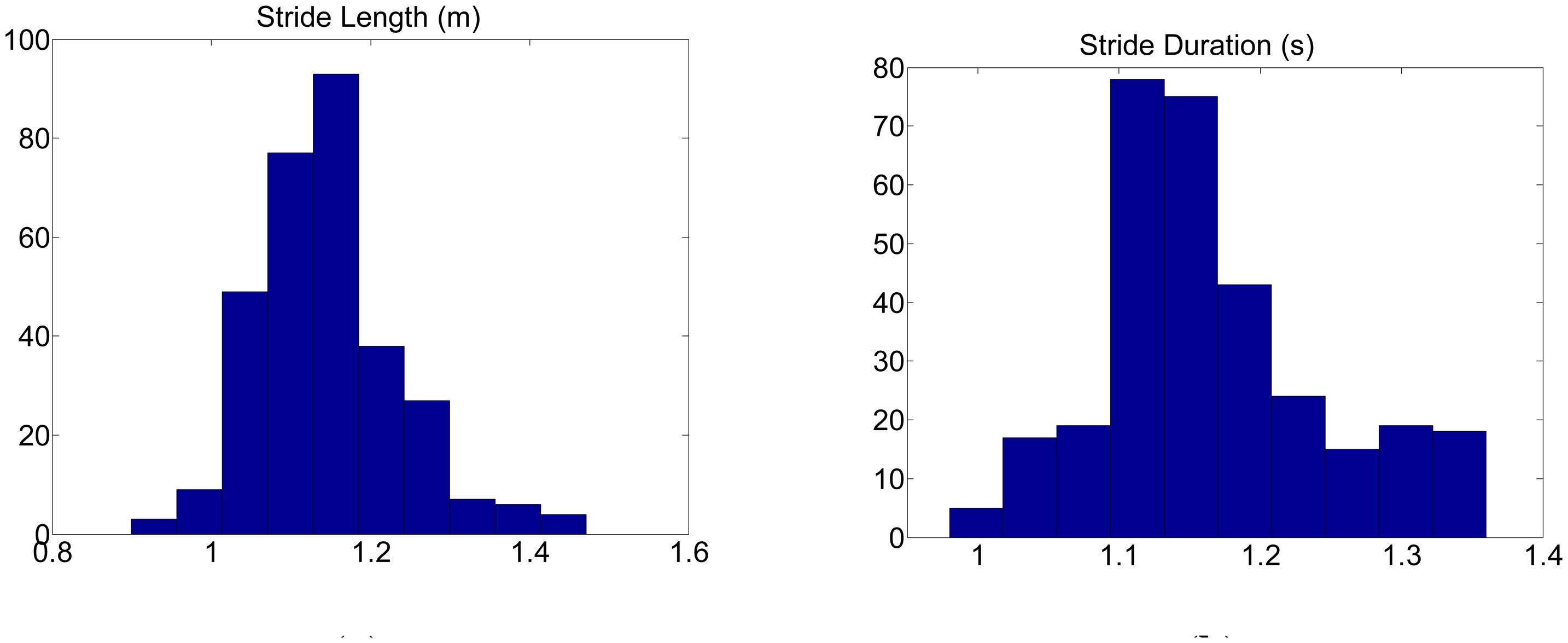
In this part, ANOVA has been performed to test differences in the means (for ten subjects) for statistical significance. We base this test on a comparison of the variance due to the between-groups variability (called Mean Square Effect, or MSeffect) with the variance due to the within-group variability (called Mean Square Error, or MSerror). Before applying ANOVA, whether the distribution of the data is normal or not should be checked. Results are reported in Table 7 and Figure A1. In Table 7, H = 0 indicates that the null hypothesis (“mean is zero”) cannot be rejected at the 5% significance level. The p-value is the probability of observing the given result by chance if the null hypothesis is true. Large value of p shows the validity of the null hypothesis. As in Table 7, not only all values of H are equal to zero and the values of p are equal to one, but also the means of estimates are located in the 95% confidence interval. Therefore, the estimated parameters are normally distributed.
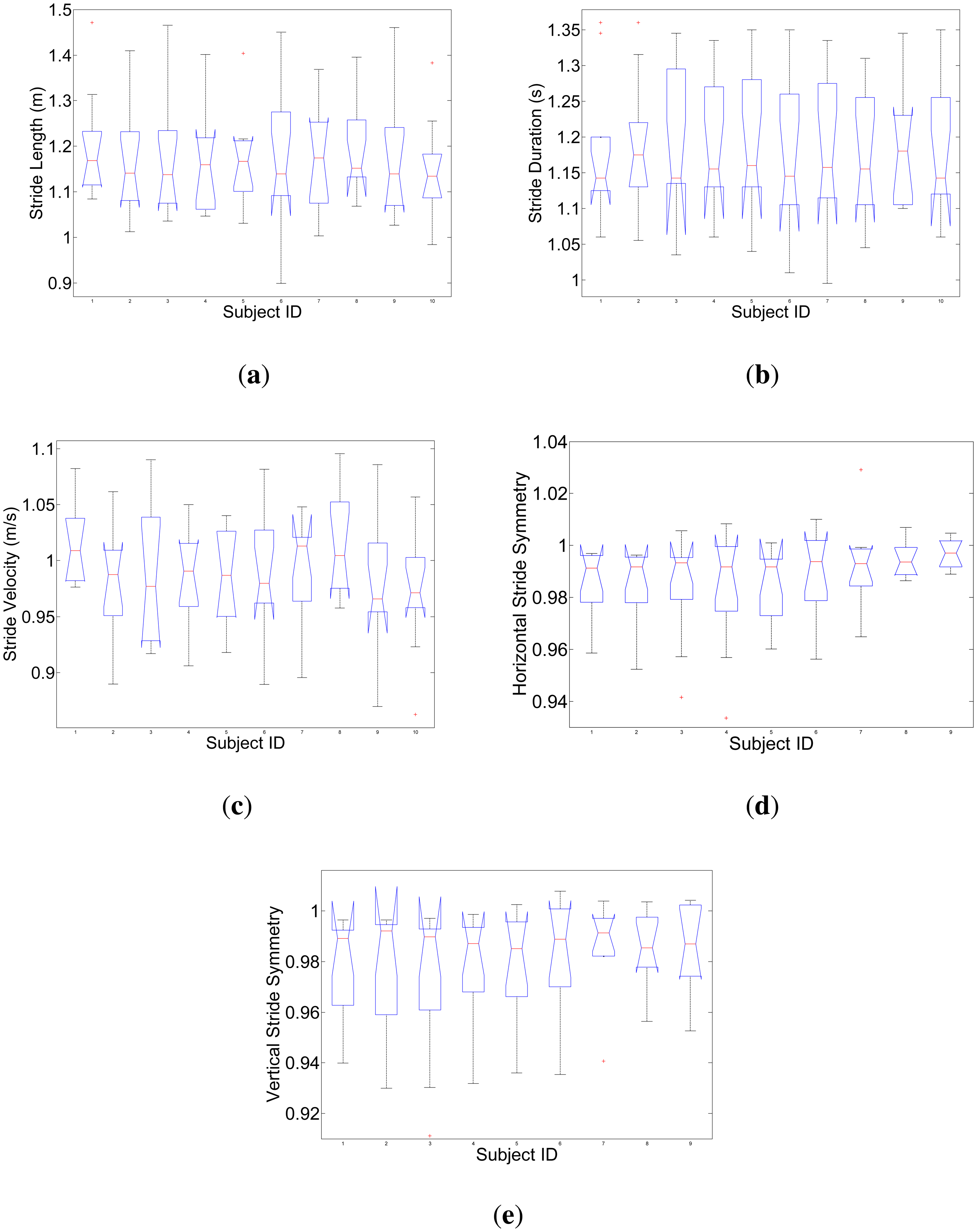
Under the null hypothesis (that there are no mean differences among subjects), we compare the MSeffect and MSerror via the F-test, which tests whether the ratio of the two variance estimates is significantly greater than 1. Otherwise, we will accept the null hypothesis of no differences between the means, i.e., the means (in the population) are not statistically different from each other. Figure B1 shows the boxplots of stride length, stride duration, stride velocity, horizontal stride symmetry and vertical stride symmetry for each subject. The analysis of variance is summarized in Table C1. As shown in Table C1, for all estimated gait parameters, the small value of between-groups sum of squares likely indicates no differences among the subjects. Additionally, the values of F are less than 1, which indicates that the means of all gait parameters are not statistically different.
4.4.3. The Effect of Walking Speed on the Measurement of Gait parameters
Table 8 provides the numerical results of estimated gait parameters by the proposed system compared with those obtained from the reference system using the pair t-test. Significant difference was assumed when the null hypothesis can be rejected at p-value smaller than 0.05. The walking speed, on average, across all subjects was significantly different (p < 0.001 for the two measurement systems) among slow (0.54 ± 0.02 m/s), normal (0.99 ± 0.04 m/s)and fast (1.40 ± 0.04 m/s) speed. The influence of walking speed on all spatial-temporal gait parameters was tested by the mean and standard deviation values for the proposed and reference systems.
The measurement errors of estimated S, NS, NV, C, and vS were not affected significantly by the changes in walking velocity (p > 0.05). Particularly, there is no difference in cadence estimation between the proposed and reference systems. The influence of speed on the measurement errors of stride duration T was found to be significantly higher (p < 0.05) at fast speed, but it was not significant for V and hS. This can be interpreted as the lower temporal resolution at higher walking speed. Figure 5 shows significant changes in T and C, but there is no significant change in other parameters. Although the means of both horizontal stride symmetry and vertical stride symmetry are not statistically significant, the largest variations at slow speeds were observed. Therefore, the stride symmetry can be used as warning sign of walking disorders.
5. Discussion and Conclusions
In this paper, a low-cost ultrasonic motion analysis system using an ultrasonic transmitter and four receivers to track the foot displacement in 3D space is developed. The proposed motion analysis system has been validated against camera-based system with 10 healthy subjects, and shown to produce accurate estimates of some spatial-temporal gait parameters including stride length with RMSE value of 0.027 m (2.3%), stride duration with RMSE value of 0.035 s (3%), stride velocity with RMSE value of 0.036 m/s (3.6%), horizontal stride symmetry with RMSE value of 0.013 (1.3%) and vertical stride symmetry with RMSE value of 0.034 m (3.5%). We have further evaluated the influence of walking speed on these gait parameters by paired t-test.
The proposed system includes some ultrasonic sensors and micro-controllers, estimated today at about a cost of $100, which is inexpensive compared with current commercial camera-based system. With the rapid development of technology, the performance of these sensors will continue to improve while becoming available at even lower price. Therefore, low-cost in-home monitoring system for clinical applications can be possible.
As the work stated here is a first step to evaluate the feasibility of the proposed ultrasonic system, only ten healthy subjects participated in the experiments and were instructed to walk 5 min on treadmill at different speeds. The walking experiments were chosen on treadmill due to the limited measurement volume of the reference camera-based system. In addition, we can get a cyclic signal on horizontal displacement to analyze the stride symmetry. Although the proposed ultrasonic motion analysis system also has such limitations, the maximum propagation distance of the ultrasonic signal used in our system is 20 m, which is large enough for indoor applications.
Although the positive results showed the feasibility of applying such a system for in-home monitoring, there is an issue to be addressed in further research, i.e., how to deal with the multipath propagation. All the experiments in this study are conducted under line-of-sight condition, where the ultrasonic transmitter faces all the receivers without any obstacles between them. Therefore, for 3D displacements, according to spherical positioning technique, a minimum of 4 anchors with known positions are required. The method used in our experiment to mitigate the multipath propagation is by setting an inhibit time, i.e., the ultrasound detector will be disabled within the inhibit time to detect an ultrasound signal, and will be enabled again after the inhibit time has passed. Another possible solution is that we can use more receivers, which can not only account for multipath propagation, but also increase the measurement volume and accuracy of the proposed system [34].
Long-term monitoring is expected to be more challenging as demonstrated in some studies [18,43]. In [18,43], foot clearance measurement using inertial sensors is proposed and investigated. The displacement estimation requires double integration of measured accelerations from inertial sensors, which involves error accumulation over long time monitoring. Even though the growth uncertainty that arises from the integration of acceleration error can be mitigated by periodic corrections like ZUPT, the prerequisite is that the initial and/or terminal contact should be detected correctly, but it may be difficult in some type of abnormal gait. Although not specifically studied under long term monitoring, the proposed system does not have significant error accumulation for a 5 min walk.
In summary, we used a low-cost ultrasonic motion analysis system to extract spatial-temporal gait parameters, and tested the feasibility of the system against a reference camera-based system. The positive results demonstrated a great potential in using this low-cost system for clinical applications such as rehabilitation, gait analysis, and sports. For further work, experiments conducted with patients in collaboration with a hospital are being planned using our system.
Acknowledgments
We thank Qu Xingda from School of Mechanical & Aerospace Engineering for his technical support and all the subjects who participated in this project.
Author Contributions
The work presented here was carried out in collaboration between all authors. Cheong Boon Soh, Erry Gunawan and Kay-Soon Low proposed the research theme with regular feedbacks of suggestions/ideas during the weekly research meetings. Yongbin Qi and Cheong Boon Soh co-designed the methods and implementation. Yongbin Qi and Rijil Thomas co-worked on associated data collection and carried out the laboratory experiments. All authors have contributed, reviewed and improved the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A Histograms of Stride Length, Stride Duration, Stride Velocity, Horizontal Stride Symmetry and Vertical Stride Symmetry


Appendix B Boxplots of Stride Length, Stride Duration, Stride Velocity, Horizontal Stride Symmetry and Vertical Stride Symmetry for Each Subject

Appendix C Summary of the Analysis of Variance of Stride Length, Stride Duration, Stride Velocity, Horizontal Stride Symmetry, and Vertical Stride Symmetry

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ANOVA Table: Stride Length | |||||
|---|---|---|---|---|---|
| Source of Variation | Sum of Squares | Degrees of Freedom | Mean Square | F | Prob > F |
| Between groups | 0.01804 | 9 | 0.002 | 0.14 | 0.9984 |
| Within groups | 1.29563 | 90 | 0.0144 | ||
| Total | 1.31367 | 99 | |||
| ANOVA Table: Stride Duration | |||||
| Source of Variation | Sum of Squares | Degrees of Freedom | Mean Square | F | Prob > F |
| Between groups | 0.00446 | 9 | 0.0005 | 0.05 | 1 |
| Within groups | 0.81343 | 90 | 0.00904 | ||
| Total | 0.81789 | 99 | |||
| ANOVA Table: Stride Velocity | |||||
| Source of Variation | Sum of Squares | Degrees of Freedom | Mean Square | F | Prob > F |
| Between groups | 0.01709 | 9 | 0.0019 | 0.72 | 0.6936 |
| Within groups | 0.23895 | 90 | 0.00266 | ||
| Total | 0.25604 | 99 | |||
| ANOVA Table: Horizontal Stride Symmetry | |||||
| Source of Variation | Sum of Squares | Degrees of Freedom | Mean Square | F | Prob > F |
| Between groups | 0.00069 | 9 | 0.00009 | 0.13 | 0.9976 |
| Within groups | 0.05293 | 90 | 0.00059 | ||
| Total | 0.05363 | 99 | |||
| ANOVA Table: Vertical Stride Symmetry | |||||
| Source of Variation | Sum of Squares | Degrees of Freedom | Mean Square | F | Prob > F |
| Between groups | 0.00047 | 9 | 0.00005 | 0.06 | 0.9999 |
| Within groups | 0.0793 | 90 | 0.00088 | ||
| Total | 0.07977 | 99 | |||
References
- Liu, T.; Inoue, Y.; Shibata, K. A wearable ground reaction force sensor system and its application to the measurement of extrinsic gait variability. Sensors 2010, 10, 10240–10255. [Google Scholar]
- Dadashi, F.; Mariani, B.; Rochat, S.; Biila, C.J.; Santos-Eggimann, B.; Aminian, K. Gait and foot clearance parameters obtained using shoe-worn inertial sensors in a large-population sample of older adults. Sensors 2013, 13, 443–457. [Google Scholar]
- Martin Schepers, H.; van Asseldonk, E.H.; Baten, C.; Veltink, P.H. Ambulatory estimation of foot placement during walking using inertial sensors. J. Biomech. 2010, 43, 3138–3143. [Google Scholar]
- Salarian, A.; Russmann, H.; Vingerhoets, F.J.; Dehollaini, C.; Blanc, Y.; Burkhard, P.R.; Aminian, K. Gait assessment in Parkinson's disease: Toward an ambulatory system for long-term monitoring. IEEE Trans. Biomed. Eng. 2004, 51, 1434–1443. [Google Scholar]
- Khandoker, A.H.; Taylor, S.B.; Karmakar, C.K.; Begg, R.K.; Palaniswami, M. Investigating scale invariant dynamics in minimum toe clearance variability of the young and elderly during treadmill walking. IEEE Trans. Neural Syst. Rehabil. Eng. 2008, 16, 380–389. [Google Scholar]
- Begg, R.; Best, R.; Dell'Oro, L.; Taylor, S. Minimum foot clearance during walking: Strategies for the minimisation of trip-related falls. Gait Posture 2007, 25, 191–198. [Google Scholar]
- Lai, D.T.; Taylor, S.B.; Begg, R.K. Prediction of foot clearance parameters as a precursor to forecasting the risk of tripping and falling. Hum. Mov. Sci. 2012, 31, 271–283. [Google Scholar]
- Allen, J.L.; Kautz, S.A.; Neptune, R.R. Step length asymmetry is representative of compensatory mechanisms used in post-stroke hemiparetic walking. Gait Posture 2011, 33, 538–543. [Google Scholar]
- Moe-Nilssen, R.; Helbostad, J.L. Estimation of gait cycle characteristics by trunk accelerometry. J. Biomech. 2004, 37, 121–126. [Google Scholar]
- Kose, A.; Cereatti, A.; DellaCroce, U. Bilateral step length estimation using a single inertial measurement unit attached to the pelvis. J. Neuroeng. Rehabil. 2012, 9, 1–10. [Google Scholar]
- Tao, W.; Liu, T.; Zheng, R.; Feng, H. Gait analysis using wearable sensors. Sensors 2012, 12, 2255–2283. [Google Scholar]
- Lee, G.X.; Low, K.S. A Factorized Quaternion Approach to Determine the Arm Motions Using Triaxial Accelerometers With Anatomical and Sensor Constraints. IEEE Trans. Instrum. Meas. 2012, 61, 1793–1802. [Google Scholar]
- Qi, Y.; Soh, C.B.; Gunawan, E.; Low, K.S.; Maskooki, A. A Novel Approach to Joint Flexion/Extension Angles Measurement Based on Wearable UWB Radios. IEEE J. Biomed. Health Inform. 2014, 18, 300–308. [Google Scholar]
- Qi, Y.; Soh, C.B.; Gunawan, E.; Low, K.S.; Maskooki, A. Measurement of knee flexion/extension angle using wearable UWB radios. Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), San Diego, CA, USA, 28 August-1 September 2013; pp. 7213–7216.
- Schepers, H.M.; Koopman, H.; Veltink, P.H. Ambulatory assessment of ankle and foot dynamics. IEEE Trans. Biomed. Eng. 2007, 54, 895–902. [Google Scholar]
- Schepers, H.M.; van Asseldonk, E.H.; Buurke, J.H.; Veltink, P.H. Ambulatory estimation of center of mass displacement during walking. IEEE Trans. Biomed. Eng. 2009, 56, 1189–1195. [Google Scholar]
- Lee, M.K.; Le, N.S.; Fang, A.C.; Koh, M.T. Measurement of body segment parameters using dual energy X-ray absorptiometry and three-dimensional geometry: An application in gait analysis. J. Biomech. 2009, 42, 217–222. [Google Scholar]
- Lai, D.; Begg, R.; Charry, E.; Palaniswami, M.; Hill, K. Measuring toe clearance using a wireless inertial sensing device. Proceedings of the 2008 IEEE International Conference on Intelligent Sensors, Sensor Networks and Information Processing (ISSNIP 2008), Sydney, NSW, Australia, 15–18 December 2008; pp. 375–380.
- Petruska, A.J.; Meek, S.G. Non-drifting limb angle measurement relative to the gravitational vector during dynamic motions using accelerometers and rate gyros. Proceedings of the 2011 IEEE/RSJ International Conference on Intellignet Robots and Systems, San Francisco, CA, USA, 25–30 September 2011.
- Panahandeh, G.; Mohammadiha, N.; Leijon, A.; Handel, P. Continuous hidden Markov model for pedestrian activity classification and gait analysis. IEEE Trans. Instrum. Meas. 2013, 62, 1073–1083. [Google Scholar]
- Ruiz, A.R.J.; Granja, F.S.; Prieto Honorato, J.C.; Rosas, J.I.G. Accurate pedestrian indoor navigation by tightly coupling foot-mounted IMU and RFID measurements. IEEE Trans. Instrum. Meas. 2012, 61, 178–189. [Google Scholar]
- Corrales, J.A.; Candelas, F.; Torres, F. Hybrid tracking of human operators using IMU/UWB data fusion by a Kalman filter. Proceedings of the 2008 3rd ACM/IEEE International Conference on Human-Robot Interaction (HRI), Amsterdam, The Netherlands, 12–15 March 2008; pp. 193–200.
- Qi, Y.; Soh, C.B.; Gunawan, E.; Low, K.S.; Maskooki, A. Using wearable UWB radios to measure foot clearance during walking. Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), San Diego, CA, USA, 28 August-1 September 2013; pp. 5199–5202.
- Wahab, Y.; Bakar, N.A. Gait analysis measurement for sport application based on ultrasonic system. Proceedings of the 2011 IEEE 15th International Symposium on Consumer Electronics, Singapore, Singapore, 14–17 June 2011.
- Wahab, Y.; Zayegh, A.; Bakar, N. Foot-to-ground Clearance Measurement: Analysis and Modelling of MEMS Applicability. Int. J. Res. Rev. Signal Acquis. Process. (IJRRSAP) 2012, 2, 154–158. [Google Scholar]
- Huitema, R.B.; Hof, A.L.; Postema, K. Ultrasonic motion analysis system: measurement of temporal and spatial gait parameters. J. Biomech. 2002, 35, 837–842. [Google Scholar]
- Maki, H.; Ogawa, H.; Yonezawa, Y.; Hahn, A.W.; Caldwell, W.M. A new ultrasonic stride length measuring system. Biomed. Sci. Instrum. 2012, 48, 282–287. [Google Scholar]
- Lee, S.; Lee, W.; You, K. TDoA Based UAV Localization Using Dual-EKF Algorithm. In In Control and Automation; Springer: Berlin, Germany, 2009; pp. 47–54. [Google Scholar]
- Chen, Z.X.; Wei, H.W.; Wan, Q.; Ye, S.F.; Yang, W.L. A supplement to multidimensional scaling framework for mobile location: A unified view. IEEE Trans. Signal Process 2009, 57, 2030–2034. [Google Scholar]
- Zhou, Y.; Law, C.; Guan, Y.; Chin, F. Indoor elliptical localization based on asynchronous UWB range measurement. IEEE Trans. Instrum. Meas. 2011, 60, 248–257. [Google Scholar]
- Shareef, A.; Zhu, Y. Localization using extended Kalman filters in wireless sensor networks. In Graduate Student Scholarly and Creative Submissions; University of Maine: Orono, ME, USA, 2009. [Google Scholar]
- Zhou, Y.; Law, C.L.; Guan, Y.L.; Chin, F. Localization of passive target based on UWB backscattering range measurement. Proceedings of the 2009 IEEE International Conference on Ultra-Wideband (ICUWB 2009), Vancouver, BC, Canada, 9–11 September 2009; pp. 145–149.
- Foy, W. Position-location solutions by Taylor-series estimation. IEEE Trans. Aerosp. Electr. Syst. 1976, AES-12, 187–194. [Google Scholar]
- Qi, Y.; Soh, C.B.; Gunawan, E.; Low, K.S.; Maskooki, A. An Accurate 3D UWB Hyperbolic Localization in Indoor Multipath Environment Using Iterative Taylor-Series Estimation. Proceedings of the 2013 IEEE 77th Vehicular Technology Conference (VTC Spring), Dresden, Germany, 2–5 June 2013; pp. 1–5.
- Priyantha, N.B. The Cricket Indoor Location System. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2005. [Google Scholar]
- Smith, A.; Balakrishnan, H.; Goraczko, M.; Priyantha, N. Tracking moving devices with the cricket location system. Proceedings of the 2nd International Conference on Mobile Systems, Applications, and Services, Boston, MA, USA, 6–9 June 2004; pp. 190–202.
- Hartikainen, J.; Solin, A.; Sarkka, S. Optimal Filtering with Kalman Filters and Smoothers; Department of Biomedica Engineering and Computational Sciences, Aalto University School of Science: Greater Helsinki, Finland; 16; August; 2011. [Google Scholar]
- Qi, Y.; Soh, C.B.; Gunawan, E.; Low, K.S. Ambulatory Measurement of 3-Dimensional Foot Displacement During Treadmill Walking Using Wearable Wireless Ultrasonic Sensor Network. IEEE J. Biomed. Health Inform. 2014. accepted. [Google Scholar]
- Bando, M.; Kawamata, Y.; Aoki, T. Dynamic sensor bias correction for attitude estimation using unscented Kalman filter in autonomous vehicle. Int. J. Innov. Comput. Inf. Control 2012, 9, 2347–2358. [Google Scholar]
- Barrey, E.; Hermelin, M.; Vaudelin, J.; Poirel, D.; Valette, J. Utilisation of an accelerometric device in equine gait analysis. Equine Vet. J. 1994, 26, 7–12. [Google Scholar]
- Auvinet, B.; Chaleil, D.; Barrey, E. Accelerometric gait analysis for use in hospital outpatients. Revue du rhumatisme (English ed.) 1998, 66, 389–397. [Google Scholar]
- Brodie, M.; Walmsley, A.; Page, W. Dynamic accuracy of inertial measurement units during simple pendulum motion: Technical Note. Comput. Methods Biomech. Biomed. Eng. 2008, 11, 235–242. [Google Scholar]
- Mariani, B.; Rochat, S.; Bula, C.; Aminian, K. Heel and Toe Clearance Estimation for Gait Analysis Using Wireless Inertial Sensors. IEEE Trans. Biomed. Eng. 2012, 59, 3162–3168. [Google Scholar]




| Mean (mm) | std (mm) | RMSE (mm) | Net RMSE (mm) | |
|---|---|---|---|---|
| X | 0.02 | 4.08 | 4.08 | 4.08 |
| Y | 0.03 | 0.72 | 0.72 | 4.14 |
| Z | 0.09 | 1.08 | 1.08 | 4.28 |
| Subject | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | Average | Peak | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ref | mean | 1.147 | 1.071 | 1.158 | 1.421 | 1.117 | 1.137 | 1.101 | 1.276 | 1.041 | 1.224 | 1.169 | 1.421 |
| std | 0.047 | 0.019 | 0.019 | 0.037 | 0.046 | 0.056 | 0.041 | 0.035 | 0.055 | 0.034 | 0.039 | 0.056 | |
| Pro | mean | 1.147 | 1.070 | 1.157 | 1.420 | 1.116 | 1.136 | 1.100 | 1.274 | 1.040 | 1.223 | 1.168 | 1.420 |
| std | 0.057 | 0.025 | 0.027 | 0.057 | 0.050 | 0.064 | 0.034 | 0.038 | 0.067 | 0.035 | 0.045 | 0.067 | |
| RMSE | 0.029 | 0.022 | 0.013 | 0.033 | 0.029 | 0.024 | 0.020 | 0.029 | 0.042 | 0.030 | 0.027 | 0.042 | |
| Subject | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | Average | Peak | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ref | mean | 1.237 | 1.109 | 1.134 | 1.344 | 1.160 | 1.155 | 1.114 | 1.309 | 1.050 | 1.192 | 1.180 | 1.344 |
| std | 0.031 | 0.011 | 0.014 | 0.015 | 0.021 | 0.025 | 0.020 | 0.020 | 0.030 | 0.014 | 0.020 | 0.031 | |
| Pro | mean | 1.236 | 1.108 | 1.134 | 1.341 | 1.161 | 1.155 | 1.114 | 1.308 | 1.051 | 1.190 | 1.180 | 1.341 |
| std | 0.053 | 0.031 | 0.033 | 0.024 | 0.049 | 0.039 | 0.044 | 0.045 | 0.050 | 0.046 | 0.041 | 0.053 | |
| RMSE | 0.042 | 0.030 | 0.027 | 0.026 | 0.046 | 0.029 | 0.034 | 0.035 | 0.033 | 0.046 | 0.035 | 0.046 | |
| Subject | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | Average | Peak | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ref | mean | 0.927 | 0.966 | 1.021 | 1.057 | 0.964 | 0.984 | 0.989 | 0.974 | 0.992 | 1.027 | 0.990 | 1.057 |
| std | 0.032 | 0.017 | 0.011 | 0.025 | 0.039 | 0.043 | 0.043 | 0.028 | 0.049 | 0.034 | 0.032 | 0.049 | |
| Pro | mean | 0.928 | 0.966 | 1.021 | 1.060 | 0.962 | 0.984 | 0.989 | 0.975 | 0.991 | 1.029 | 0.991 | 1.060 |
| std | 0.042 | 0.032 | 0.027 | 0.042 | 0.049 | 0.053 | 0.046 | 0.038 | 0.064 | 0.053 | 0.045 | 0.064 | |
| RMSE | 0.038 | 0.033 | 0.024 | 0.021 | 0.049 | 0.032 | 0.035 | 0.031 | 0.047 | 0.053 | 0.036 | 0.053 | |
| Subject | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | Average | Peak | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ref | mean | 1.002 | 1.003 | 1.000 | 1.012 | 1.002 | 0.996 | 1.000 | 0.995 | 0.999 | 1.000 | 1.001 | 1.012 |
| std | 0.021 | 0.010 | 0.007 | 0.021 | 0.016 | 0.033 | 0.006 | 0.014 | 0.067 | 0.009 | 0.021 | 0.067 | |
| Pro | mean | 1.004 | 1.001 | 1.001 | 1.011 | 1.001 | 0.991 | 1.000 | 0.996 | 0.989 | 1.000 | 0.999 | 1.011 |
| std | 0.027 | 0.007 | 0.008 | 0.023 | 0.022 | 0.049 | 0.013 | 0.016 | 0.089 | 0.018 | 0.027 | 0.089 | |
| RMSE | 0.010 | 0.004 | 0.004 | 0.013 | 0.011 | 0.021 | 0.009 | 0.008 | 0.038 | 0.010 | 0.013 | 0.038 | |
| Subject | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | Average | Peak | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ref | mean | 1.012 | 1.000 | 0.995 | 0.931 | 0.996 | 1.002 | 1.002 | 1.004 | 1.000 | 1.007 | 0.995 | 1.012 |
| std | 0.045 | 0.009 | 0.019 | 0.181 | 0.016 | 0.051 | 0.010 | 0.018 | 0.065 | 0.019 | 0.043 | 0.181 | |
| Pro | mean | 1.009 | 1.002 | 0.997 | 0.991 | 0.996 | 1.003 | 1.002 | 1.012 | 0.997 | 1.011 | 1.002 | 1.012 |
| std | 0.042 | 0.038 | 0.017 | 0.069 | 0.038 | 0.038 | 0.022 | 0.044 | 0.088 | 0.030 | 0.043 | 0.088 | |
| RMSE | 0.017 | 0.036 | 0.023 | 0.079 | 0.028 | 0.031 | 0.020 | 0.039 | 0.048 | 0.023 | 0.034 | 0.079 | |
| Mean | std | H | p | 95% Confidence Interval | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| S(m) | 1.147 | 0.093 | 0.000 | 1.000 | 1.137 | 1.158 | ||||||||
| T (s) | 1.164 | 0.080 | 0.000 | 1.000 | 1.155 | 1.173 | ||||||||
| V (m/s) | 0.986 | 0.046 | 0.000 | 1.000 | 0.980 | 0.991 | ||||||||
| hS | 1.000 | 0.028 | 0.000 | 1.000 | 0.997 | 1.003 | ||||||||
| vS | 0.999 | 0.048 | 0.000 | 1.000 | 0.994 | 1.005 | ||||||||
| Speed | Slow | Normal | Fast | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | std | p | Mean | std | Mean | std | p | ||
| S(m) | Ref | 0.884 | 0.095 | 0.000 * | 1.169 | 0.112 | 1.410 | 0.091 | 0.000 * |
| Pro | 0.884 | 0.095 | 0.000 * | 1.168 | 0.112 | 1.409 | 0.090 | 0.000 * | |
| RMSE | 0.024 | 0.012 | 0.623 | 0.027 | 0.008 | 0.031 | 0.021 | 0.550 | |
| NS | Ref | 0.075 | 0.074 | 0.329 | 0.043 | 0.031 | 0.054 | 0.031 | 0.425 |
| Pro | 0.075 | 0.074 | 0.329 | 0.043 | 0.031 | 0.054 | 0.031 | 0.425 | |
| RMSE | 0.001 | 0.001 | 0.339 | 0.001 | 0.001 | 0.001 | 0.001 | 0.547 | |
| T(s) | Ref | 1.645 | 0.192 | 0.000 * | 1.180 | 0.092 | 1.006 | 0.055 | 0.000 * |
| Pro | 1.644 | 0.195 | 0.000 * | 1.180 | 0.091 | 1.006 | 0.054 | 0.000 * | |
| RMSE | 0.039 | 0.015 | 0.592 | 0.035 | 0.007 | 0.027 | 0.005 | 0.019 * | |
| V(m/s) | Ref | 0.539 | 0.023 | 0.000 * | 0.990 | 0.037 | 1.402 | 0.044 | 0.000 * |
| Pro | 0.539 | 0.024 | 0.000 * | 0.991 | 0.038 | 1.402 | 0.043 | 0.000 * | |
| RMSE | 0.020 | 0.008 | 0.005 * | 0.036 | 0.010 | 0.048 | 0.017 | 0.073 | |
| NV | Ref | 0.044 | 0.040 | 0.692 | 0.035 | 0.021 | 0.053 | 0.030 | 0.137 |
| Pro | 0.044 | 0.040 | 0.695 | 0.035 | 0.022 | 0.053 | 0.030 | 0.138 | |
| RMSE | 0.001 | 0.001 | 0.693 | 0.001 | 0.000 | 0.002 | 0.001 | 0.131 | |
| C(stride/s) | Ref | 0.614 | 0.073 | 0.000 * | 0.853 | 0.063 | 0.993 | 0.059 | 0.000 * |
| Pro | 0.614 | 0.073 | 0.000 * | 0.853 | 0.063 | 0.993 | 0.059 | 0.000 * | |
| RMSE | 0.000 | 0.000 | NaN | 0.000 | 0.000 | 0.000 | 0.000 | NaN | |
| hS | Ref | 0.993 | 0.025 | 0.368 | 1.001 | 0.004 | 1.001 | 0.003 | 0.996 |
| Pro | 0.988 | 0.031 | 0.267 | 0.999 | 0.006 | 1.002 | 0.005 | 0.334 | |
| RMSE | 0.024 | 0.016 | 0.039 * | 0.013 | 0.010 | 0.016 | 0.015 | 0.587 | |
| vS | Ref | 1.021 | 0.040 | 0.124 | 0.995 | 0.023 | 1.002 | 0.006 | 0.346 |
| Pro | 1.007 | 0.025 | 0.652 | 1.002 | 0.007 | 0.999 | 0.007 | 0.375 | |
| RMSE | 0.105 | 0.111 | 0.090 | 0.034 | 0.019 | 0.027 | 0.016 | 0.333 | |
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Qi, Y.; Soh, C.B.; Gunawan, E.; Low, K.-S.; Thomas, R. Estimation of Spatial-Temporal Gait Parameters Using a Low-Cost Ultrasonic Motion Analysis System. Sensors 2014, 14, 15434-15457. https://doi.org/10.3390/s140815434
Qi Y, Soh CB, Gunawan E, Low K-S, Thomas R. Estimation of Spatial-Temporal Gait Parameters Using a Low-Cost Ultrasonic Motion Analysis System. Sensors. 2014; 14(8):15434-15457. https://doi.org/10.3390/s140815434
Chicago/Turabian StyleQi, Yongbin, Cheong Boon Soh, Erry Gunawan, Kay-Soon Low, and Rijil Thomas. 2014. "Estimation of Spatial-Temporal Gait Parameters Using a Low-Cost Ultrasonic Motion Analysis System" Sensors 14, no. 8: 15434-15457. https://doi.org/10.3390/s140815434