
Feasibility of Multiple Micro-Particle Trapping—A Simulation Study

Abstract
:
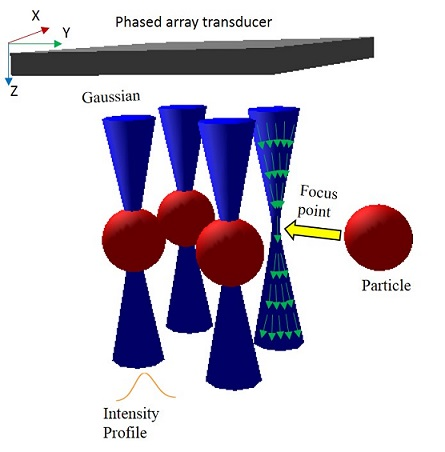
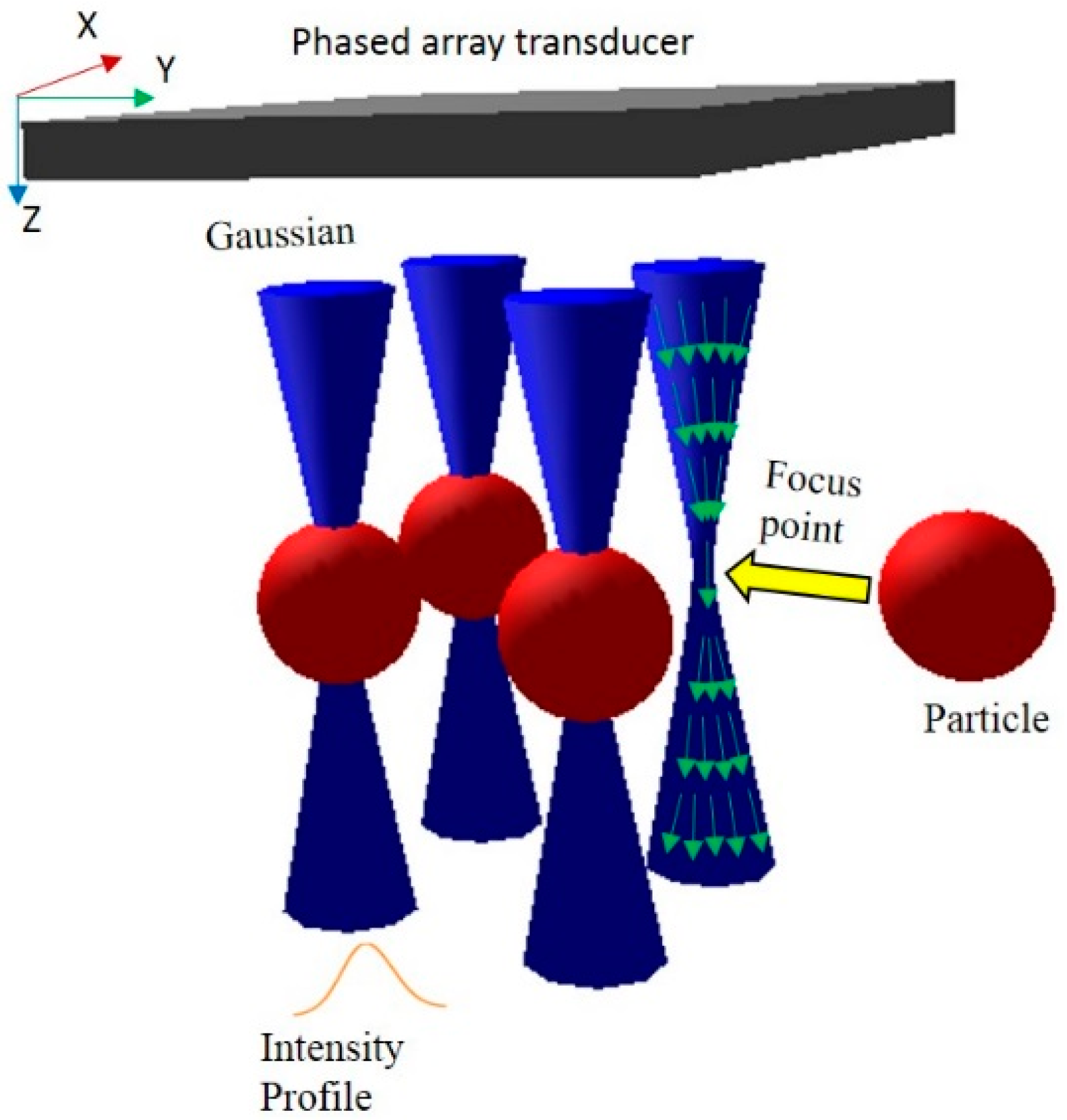
1. Introduction
2. Methods


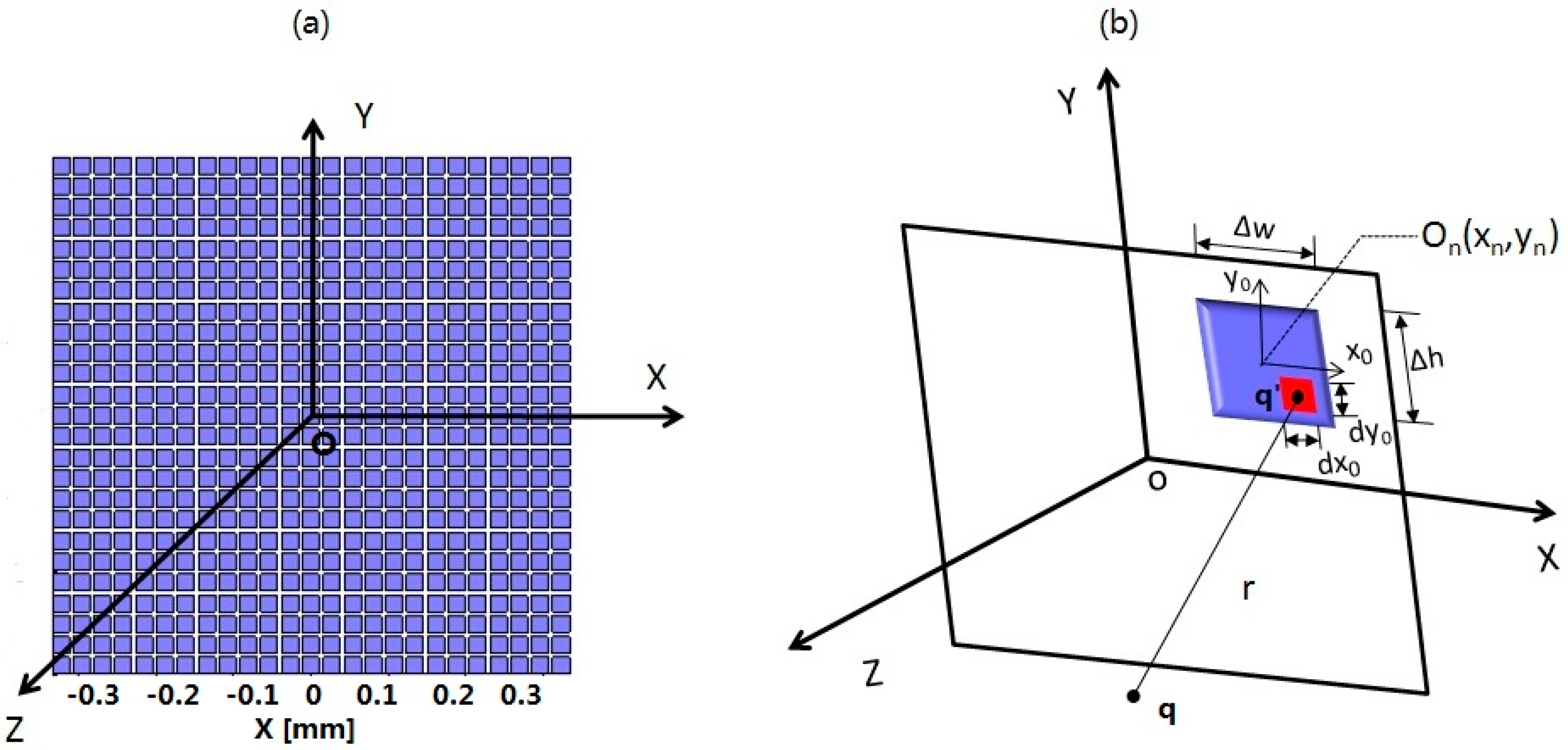
2.1. Determine Excitation for Each Phased Array Element

2.2. Acoustic Field Modeling
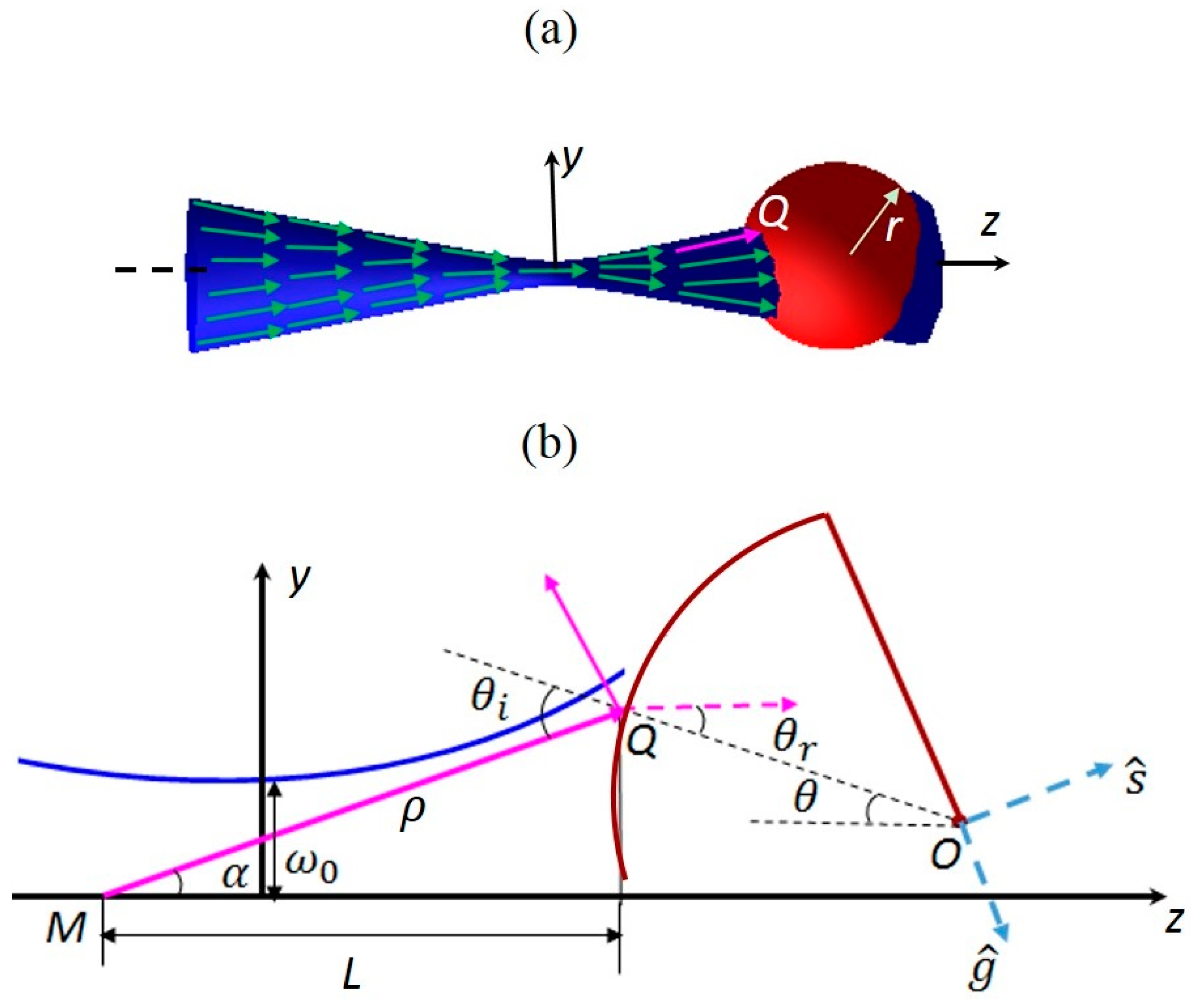
2.3. The Theory of Acoustic Tweezers

2.4. Resistance Force and Acoustic Streaming Effect
3. Results and Discussion

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elements Number of Phased Array | 25 25 |
|---|---|
| The kerf size The pitch size | 5 μm 27 μm |
| Center frequency | 50 MHz |
| Wavelength (λ) | 30 μm |
| Input acoustic power | 4.25 mW |
| Peak incident intensity | 150 w/cm2 |
| Peak incident pressure | 2.15 MPa |
| Acoustic impedance of water | 1.5 MRayls |
| Acoustic impedance of particle | 1.4 MRayls |
| Speed of sound in water | 1500 m/s |
| Speed of sound in particle viscosity coefficient of water | 1450 m/s 8.9 10−4 Pa∙s |
| Density of water | 1000 kg/m3 |
| Density of particle | 950 kg/m3 |
| Diameter of particle | 8λ ~ 12λ |
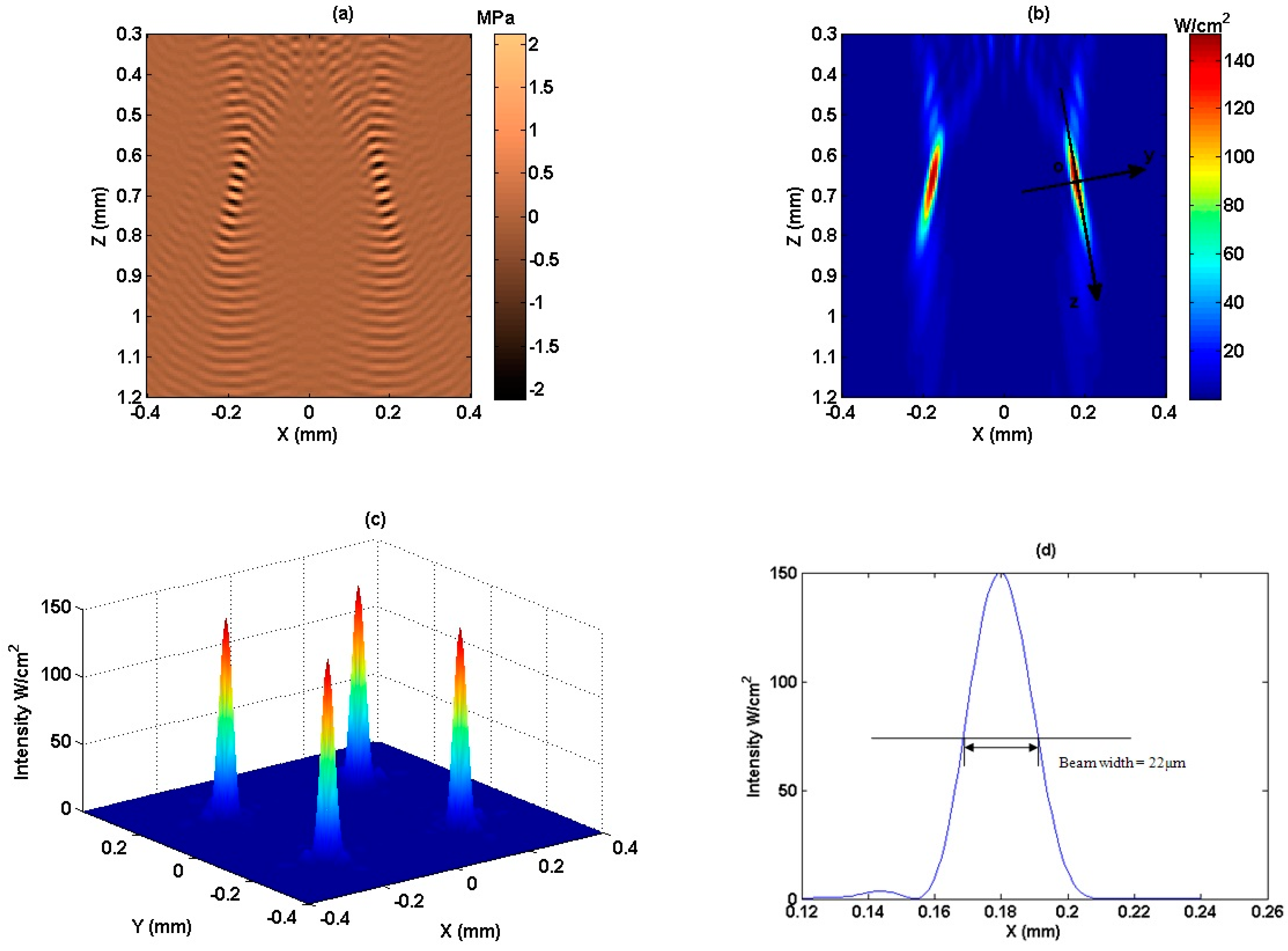
3.1. Multiple-Focus Acoustic Field
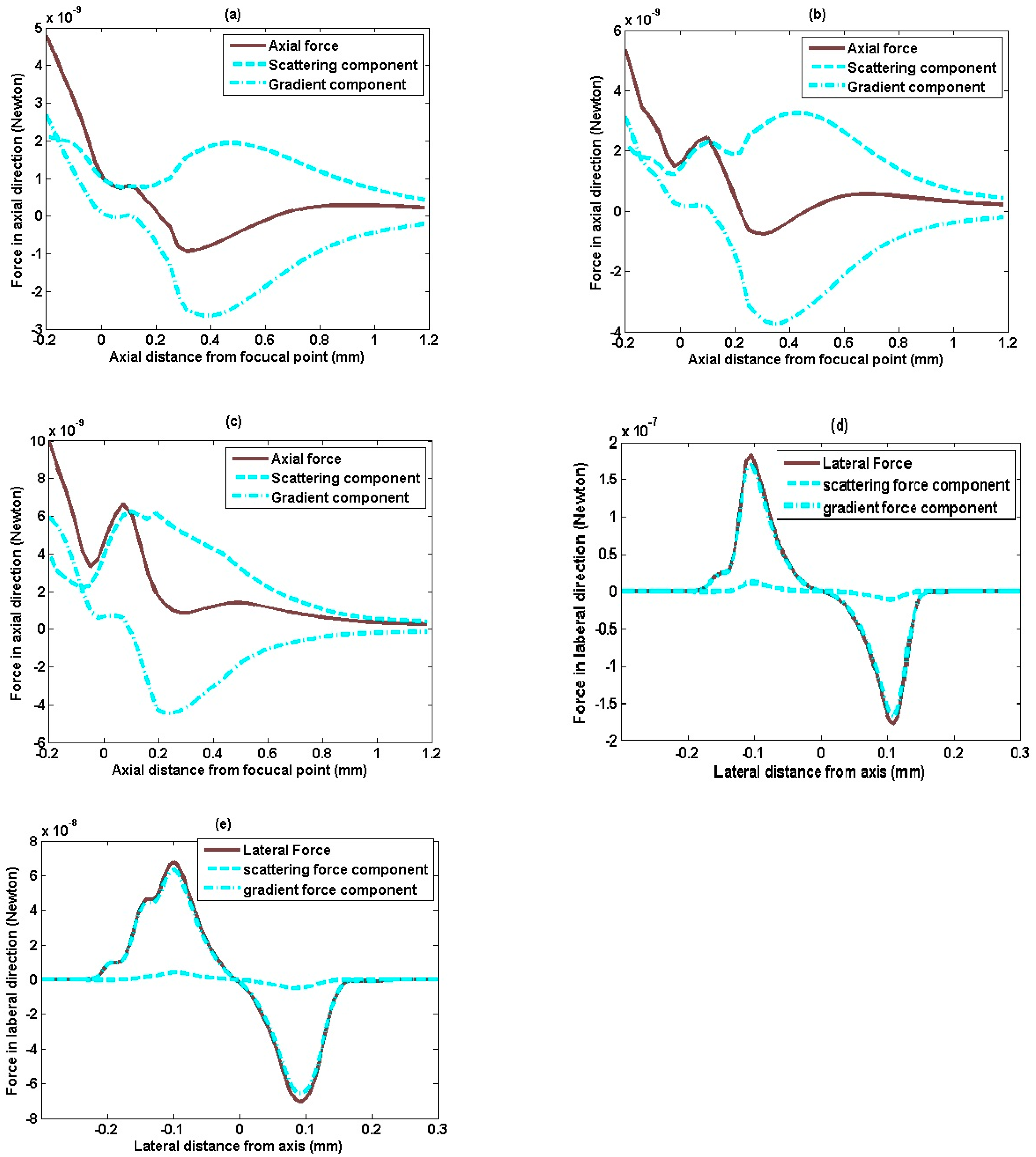
3.2. Radiation Force Analysis for the Particles in Different Location


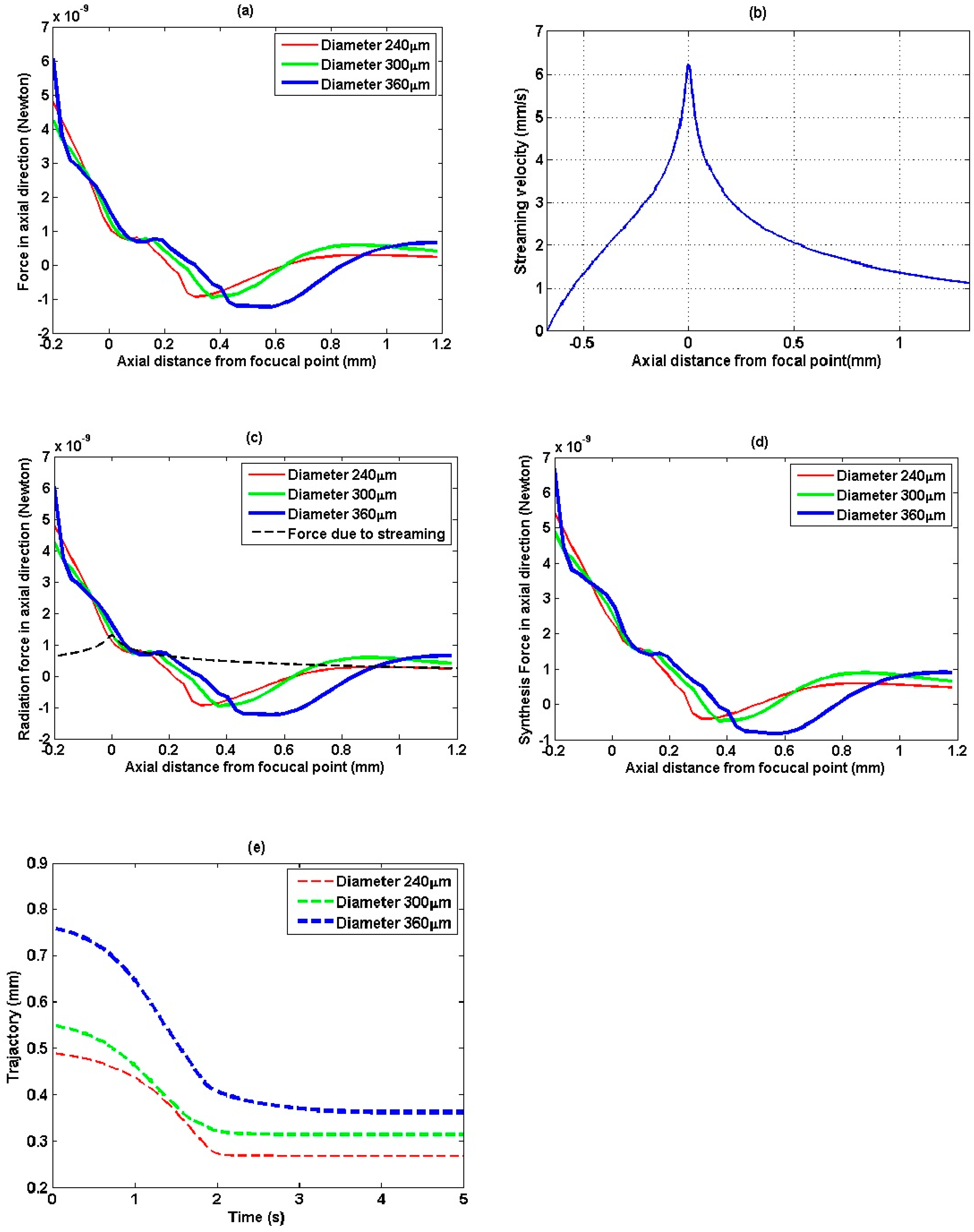
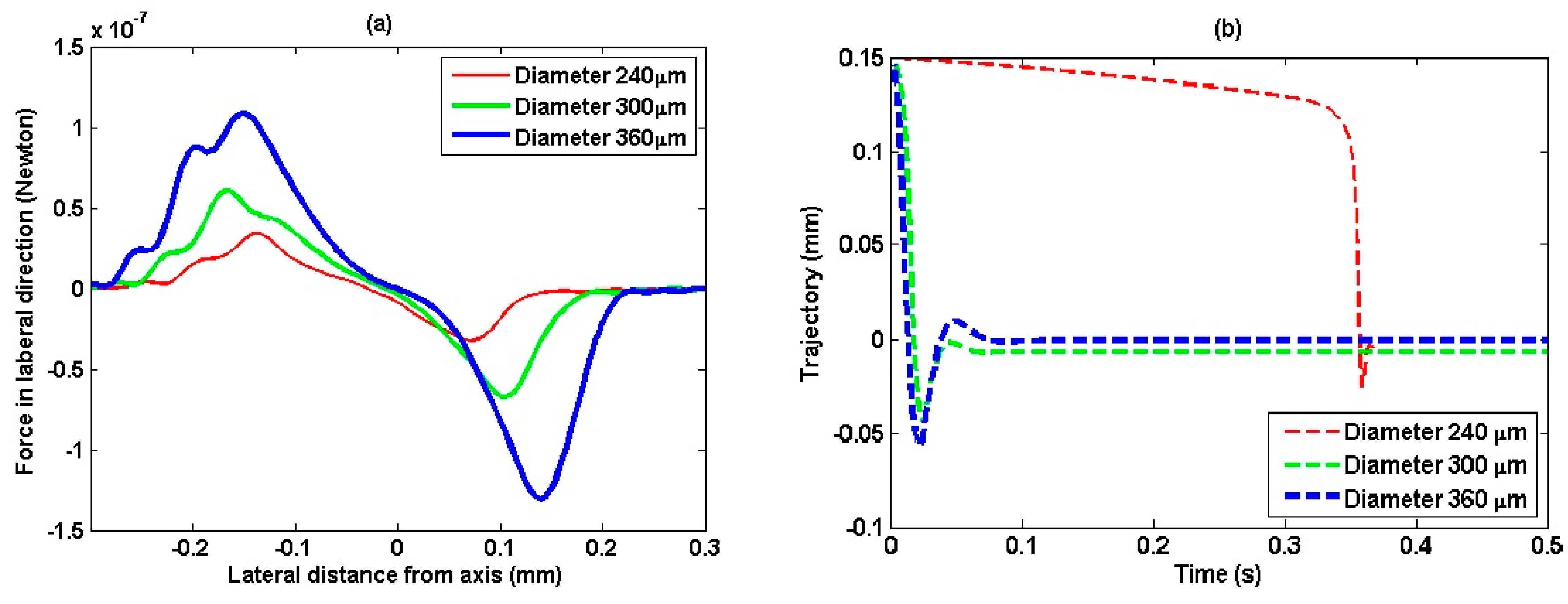
3.3. Radiation Force and Trajectory Analysis for Particles with Various Sizes


| Particle Diameter (μm) | Max. Axial Trapping Force (10−10 N) | Max. Axial Trapping Position (μm) | Axial Trapping Region (μm) | Max. Lateral Trapping Force (10−10 N) |
|---|---|---|---|---|
| 240 | −9.3 | 490 | 222 | 338 |
| 300 | −9.5 | 550 | 235 | 606 |
| 360 | −12.3 | 760 | 400 | 1087 |
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ashkin, A.; Dziedzic, J.M.; Bjorkholm, J.E.; Chu, S. Observation of a single-beam gradient force optical trap for dielectric particles. Opt. Lett. 1986, 11, 288–290. [Google Scholar] [CrossRef] [PubMed]
- Ashkin, A. Optical trapping and manipulation of neutral particles using lasers. Proc. Natl. Acad. Sci. USA 1997, 94, 4853–4860. [Google Scholar] [CrossRef] [PubMed]
- Nieminen, T.A.; du Preez-Wilkinson, N.; Stilgoe, A.B.; Loke, V.L.Y.; Bui, A.A.M.; Rubinsztein-Dunlop, H. Optical tweezers: Theory and modelling. Quant. Spectrosc. Radiat. Transf. 2014, 146, 59–80. [Google Scholar] [CrossRef]
- Rasmussen, M.B.; Oddershede, L.B.; Siegumfeldt, H. Optical tweezers cause physiological damage to Escherichia coli and Listeria bacteria. Appl. Environ. Microb. 2008, 74, 2441–2446. [Google Scholar] [CrossRef]
- Neuman, K.C.; Chadd, E.H.; Liou, G.F.; Bergman, K.; Block, S.M. Characterization of photodamage to Escherichia coli in optical traps. Biophys. J. 1999, 77, 2856–2863. [Google Scholar] [CrossRef]
- Konig, K.; Liang, H.; Berns, M.W.; Tromberg, B.J. Cell damage in near-infrared multimode optical traps as a result of multiphoton absorption. Opt. Lett. 1996, 21, 1090–1092. [Google Scholar] [CrossRef] [PubMed]
- Wu, J. Acoustical tweezers. J. Acoust. Soc. Am. 1991, 89, 2140–2143. [Google Scholar] [CrossRef] [PubMed]
- Hertz, H.M. Standing-wave acoustic trap for nonintrusive positioning of microparticles. J. Appl. Phys. 1995, 78, 4845–4849. [Google Scholar] [CrossRef]
- Courtney, C.R.; Ong, C.K.; Drinkwater, B.W.; Wilcox, P.D.; Demore, C.; Cochran, S.; Glynne-Jones, P.; Hill, M. Manipulation of microparticles using phase-controllable ultrasonic standing waves. J. Acoust. Soc. Am. 2010, 128, 195–199. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Shung, K.K. Radiation forces exerted on arbitrarily located sphere by acoustic tweezer. J. Acoust. Soc. Am. 2006, 120, 1084–1094. [Google Scholar] [CrossRef] [PubMed]
- Kang, S.T.; Yeh, C.K. Potential-well model in acoustic tweezers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 1451–1459. [Google Scholar] [CrossRef] [PubMed]
- Lin, S.C.; Mao, X.; Huang, T.J. Surface acoustic wave (SAW) acoustophoresis: Now and beyond. Lab Chip 2012, 12, 2766–2770. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Lee, C.; Chen, R.; Zhou, Q.; Shung, K.K. A feasibility study of in vivo applications of single beam acoustic tweezers. Appl. Phys. Lett. 2014, 105, 173701–4. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Ha, K.; Shung, K.K. A theoretical study of the feasibility of acoustical tweezers: Ray acoustics approach. JASA 2005, 117, 3273–3280. [Google Scholar] [CrossRef]
- Xiao, K.; Grier, D.G. Sorting colloidal particles into multiple channels with optical forces: Prismatic optical fractionation. Phys. Rev. E 2010, 82, 051407. [Google Scholar] [CrossRef]
- Dame, R.T.; Noom, M.C.; Wuite, G.J. Bacterial chromatin organization by H-NS protein unravelled using dual DNA manipulation. Nature 2006, 444, 387–390. [Google Scholar] [CrossRef] [PubMed]
- Craighead, H.G. Future lab-on-a-chip technologies for interrogating individual molecules. Nature 2006, 442, 387–393. [Google Scholar] [CrossRef] [PubMed]
- Grier, D.G. A revolution in optical manipulation. Nature 2003, 424, 810–816. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.; Qiu, W.; Sun, L. Radiation forces study of multiple trapping acoustic tweezers. In Proceedings of the 2012 IEEE International Ultrasonics Symposium (IUS), Dresden, Germany, 7–10 October 2012; pp. 2750–2753.
- Ebbini, E.S.; Cain, C.A. Multiple-focus ultrasound phased-array pattern synthesis: Optimal driving-signal distributions for hyperthermia. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1989, 36, 540–548. [Google Scholar] [CrossRef] [PubMed]
- Kinsler, L.E.; Frey, A.R.; Coppens, A.B.; Sanders, J.V. Fundamentals of Acoustics, 4th ed.; Wiley: New York, NY, USA, 2000. [Google Scholar]
- Ocheltree, K.B.; Frizzel, L.A. Sound field calculation for rectangular sources. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1989, 36, 242–248. [Google Scholar] [CrossRef] [PubMed]
- Kang, S.T.; Yeh, C.K. Trapping of a mie sphere by acoustic pulses: Effects of pulse length. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 1487–1497. [Google Scholar] [CrossRef] [PubMed]
- Ashkin, A. Forces of asingle-beamgradientlasertrap on adielectricsphere in the rayopticsregime. Biophys. J. 1992, 61, 569–582. [Google Scholar] [CrossRef] [PubMed]
- Landau, L.D.; Lifshitz, E.M. Fluid Mechanics, 2nd ed.; Butterworth-Heinemann: Oxford, UK, 2004; Volume 2, p. 61. [Google Scholar]
- Mott, R. L. Applied Fluid Mechanics, 6th ed.; Prentice Hall: London, UK, 2005. [Google Scholar]
- Nowicki, A. Acoustic streaming: Comparison of low amplitude linear model with streaming velocities measured by 32 MHz Doppler. Ultrasound Med. Biol. 1997, 23, 783–791. [Google Scholar] [CrossRef] [PubMed]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Qiu, W.; Chiu, B.; Sun, L. Feasibility of Multiple Micro-Particle Trapping—A Simulation Study. Sensors 2015, 15, 4958-4974. https://doi.org/10.3390/s150304958
Yu Y, Qiu W, Chiu B, Sun L. Feasibility of Multiple Micro-Particle Trapping—A Simulation Study. Sensors. 2015; 15(3):4958-4974. https://doi.org/10.3390/s150304958
Chicago/Turabian StyleYu, Yanyan, Weibao Qiu, Bernard Chiu, and Lei Sun. 2015. "Feasibility of Multiple Micro-Particle Trapping—A Simulation Study" Sensors 15, no. 3: 4958-4974. https://doi.org/10.3390/s150304958