1. Introduction
Recent developments in sensor technologies, telecommunication, and navigation systems made
multi-sensor information fusion an indispensable component of the state-of-the-art integrated navigation systems. Presently, an increasing number of heterogeneous sensors [
1] are being used in navigation systems. As a result of recent advancements and the evolution of inertial navigation sensors, global satellite systems and celestial sensor technologies, multi-sensor integrated navigation continues to progress as it is capable of satisfying navigation requirements of high precision, high reliability, and strong autonomy, especially in the fields of aeronautics and astronautics. The paper develops a multi-sensor fusion framework to meet the requirements of long-time and high-precision navigation of carriers and moving objects such as long-range missiles, naval vessels, long-range bombers, and High Altitude Long-Endurance Unmanned Aerial Vehicles (HALE-UAVs). Especially in the latter case (i.e., HALE-UAV), it is necessary to continuously provide all-time and all-weather high-precision motion parameters over a long period of time. Consequently, the incorporation of an efficient and advanced multi-sensor fusion framework is both critical and essential to achieve the high-performance, reliability, and real-time requirements of modern navigation systems. Besides, multi-sensor failures can occur at the same time for example due to external environment disturbances; therefore, it is practically hard to perform failure detection and isolation with the required high precision using traditional methodologies. The multi-sensor and fault-tolerant fusion framework proposed in this paper is designed to address this issue. The proposed framework can detect multi-sensor failures and isolate the failed sub-system adaptively, and as long as the faults of the subsystem disappear, the system will return to the optimal integrated mode.
Multi-sensor information fusion in integrated navigation, typically comprises a reference navigation system corrected using measurements from other constituent sub-systems. The reference system commonly consists of an Inertial Navigation System (INS) or Strap-down Inertial Navigation System (SINS), which are sophisticated electromechanical systems that continuously provide, via the dead reckoning, position, orientation and velocity of a moving object (e.g., aircraft, missile or ship), using motion (accelerometers) and rotation (gyroscopes) sensors. Depending on different specifications of the application at hand, such as the environment, dynamics, budget and accuracy requirements, INS is combined with other navigation sensors in the fusion framework, including, among others: (i) the Global Positioning System (GPS), which is a commonly used navigation system for providing three-dimensional position and velocity information with high acceptable accuracy; (ii) the Bei-Dou2 (BD2) navigation system [
2,
3] which is a Chinese global satellite navigation system consisting of 35 satellites; and (iii) the Celestial Navigation System (CNS) [
4], which is an autonomous navigation system based on celestial observation by Sun/star sensors, which is capable of providing attitude and position information without accumulating error over time. Recently, there has been a surge of interest [
4,
5,
6,
7,
8] in the development and implementation of INS/GPS/CNS integrated navigation systems. An INS operates continuously in an autonomous fashion with a high data rate and high precision during a short time span (i.e., relatively small short-term errors); therefore, it is at the core of an integrated navigation system. However, the accuracy of INS degrades over time as the position error increases unboundedly (error is accumulated through the INS algorithm over time) [
9]. In comparison to the INS, the GPS (and similarly BD2) has some drawbacks such as possessing low update frequency together with high amplitude observation noise. Besides, its navigation accuracy and integrity significantly degrades in adverse circumstances [
10,
11,
12]. Finally, the CNS has its own drawbacks including low update rate besides being vulnerable to weather circumstances [
4]. Consequently, each of these navigation sensors has disadvantages in stand-alone mode, rendering them incapable of meeting the long-time and high-performance requirements of state-of-the-art navigation systems when used in stand-alone mode. Integration of the INS, CNS, GPS and BD2 allows us to make full use of the complementary advantages among each navigation sub-system to greatly improve the precision and reliability of the overall navigation system. Especially when the system is used in long-range missiles, naval vessels, long-range bombers and HALE-UAV applications, the need for high reliability and fault-tolerant performance justifies the costs associated with the extra complexity of the procedure.
Multi-sensor information fusion is the key component for optimal and efficient integration of these navigation sensors and is the focus of this paper. The above mentioned navigation sensors are highly complementary, and their integration through an appropriate multi-sensor fusion framework results in the utilization of their complementary advantages and the improvement of the navigation system’s overall reliability and accuracy. Despite recent advancements in this regard, on the one hand, fault detection and integrity monitoring are critically required for multi-sensor integration architectures, an issue that has been overlooked in the recent literature. On the other hand, the design of an integrated navigation system is extremely constrained especially when no information regarding the system’s error characteristics (e.g., error covariances) is available. The paper focuses on these problems and proposes an innovative fault tolerant multi-sensor information fusion framework applied in the INS/GPS/BD2/CNS integrated navigation system for improving the accuracy and reliability of such systems. In order to achieve this goal, fault detection and isolation play a crucial role [
13]. First, we briefly review relevant research works in this context to better motivate the contributions of the paper to be outlined after this short literature review.
It is well-known that the chi-square test [
14] is the conventional and commonly used failure detection methodology to monitor dynamical systems and estimation algorithms developed based on the Kalman Filter (KF). The chi-square test belongs to the class of statistical hypothesis-testing mechanisms and is commonly used to examine whether the assumed mean and covariance matrices match the actual settings or not. For instance, [
14] proposed to utilize a setup based on two state propagators, alternatively selected based on the Kalman filter’s output, to prevent the risk of using a corrupted propagator for failure detection purposes resulting in an increased failure detection sensitivity. Traditionally, however, the chi-square test is applied for single failure detection and isolation by setting a threshold to judge whether the system is failed or not [
15,
16]. For instance, [
17] employed fuzzy logic and weighted average to deal with the threshold and to reduce the percentage of incorrect alarm effectively. However, in the INS/GPS/BD2/CNS integrated navigation system, there might be multi-sensor failures at the same time, and the failure type may also be different; therefore, it is hard to perform failure detection and isolation with traditional methods. In [
18], a data fusion method with a supervised estimation process is proposed to address this issue. Caron et al. in [
19] proposed to apply the method developed in [
18] into integrated a GPS and Inertial Measurement Unit (IMU) multisensory fusion system. Through introducing contextual information in the fusion system, the proposed detection solution of [
19] is capable of rejecting false information to increase the reliability of the multi-sensor fusion algorithm. In [
20], a fault-tolerant multi-sensor fusion algorithm is developed specifically for the SINS/GPS/BD2/CNS integrated navigation system. In this work, the two state propagators’ chi-square test is used as the failure detection method which is then combined with the fusion strategy of [
18] to effectively detect and isolate multi-sensor failures. However, in scenarios where the accuracy of the inertial measurement units in the SINS is low, the aircraft manoeuvre will damage the accuracy of the SINS, thereby, reducing the failure detection sensitivity. The interacting multiple model (IMM) estimation algorithms [
21,
22,
23] are, therefore, designed to overcome this difficulty by incorporating a set of candidate models to represent different uncertainties under realistic conditions. Research on the fault detection and isolation problem with the IMM algorithm has attracted a recent surge of interest [
24,
25,
26,
27,
28,
29]. To the best of our knowledge, however, few of these aforementioned methodologies can detect multi-failures at the same time effectively. The paper addresses this gap and develops an improved multi-sensor fault tolerant fusion framework applied in the INS/GPS/BD2/CNS integrated navigation system.
In this paper and to improve the reliability and fault-tolerant capability of the aircraft navigation system, we propose an innovative fault-tolerant integrated navigation framework via fusion of SINS, GPS, BD2, and CNS sensors. The problem considered here is a real-world challenge which has not yet been addressed properly. The goal of the proposed fusion framework is to improve the accuracy and reliability of the overall system and the main contribution is to look at the system as whole and the combination (fusion) strategy proposed to solve this real-world problem we faced. Noting that the aircraft manoeuvre will damage the accuracy of the inertial measurement unit and a precisely known model of the system is hard to be achieved, we define a two level process noise covariance matrix as the system uncertainty under low and high manoeuvres. With the combination of the IMM filter, the probabilities of each model will be adjusted adaptively through a modified measurement update step. Thus, the accuracy of the state propagator will be increased. On the other hand, in order to improve the failure sensitivity of the detection solution, we combine the state chi-square test with two state propagators. These two state propagators are alternatively reactivated based on the information they receive from the fusion filter to increase the failure sensitivity of the detection system. By choosing a suitable time interval between re-setting the state propagators and using them for failure detection, the risk of having corrupted information will be avoided (minimized). By incorporating the value of the state chi-square test obtained from each sub-system, we propose an improved fusion method to isolate potential failures. Furthermore, we calculate the appropriate likelihood of the measurement to update the probability of each model. With the combination of the IMM Kalman Filter (IMM-KF) and the multiple sensor fusion method, we increase the failure sensitivity of the detection algorithm and, thereby, increase the overall accuracy of the integrated navigation system. The implementation of the proposed multi-sensor information fusion framework has the potential to significantly enhance the robustness, real-time reliability, precision, and performance of the underlying navigation system in comparison to its stand-alone navigation counterparts. In summary, the key contributions of the paper are as follows:
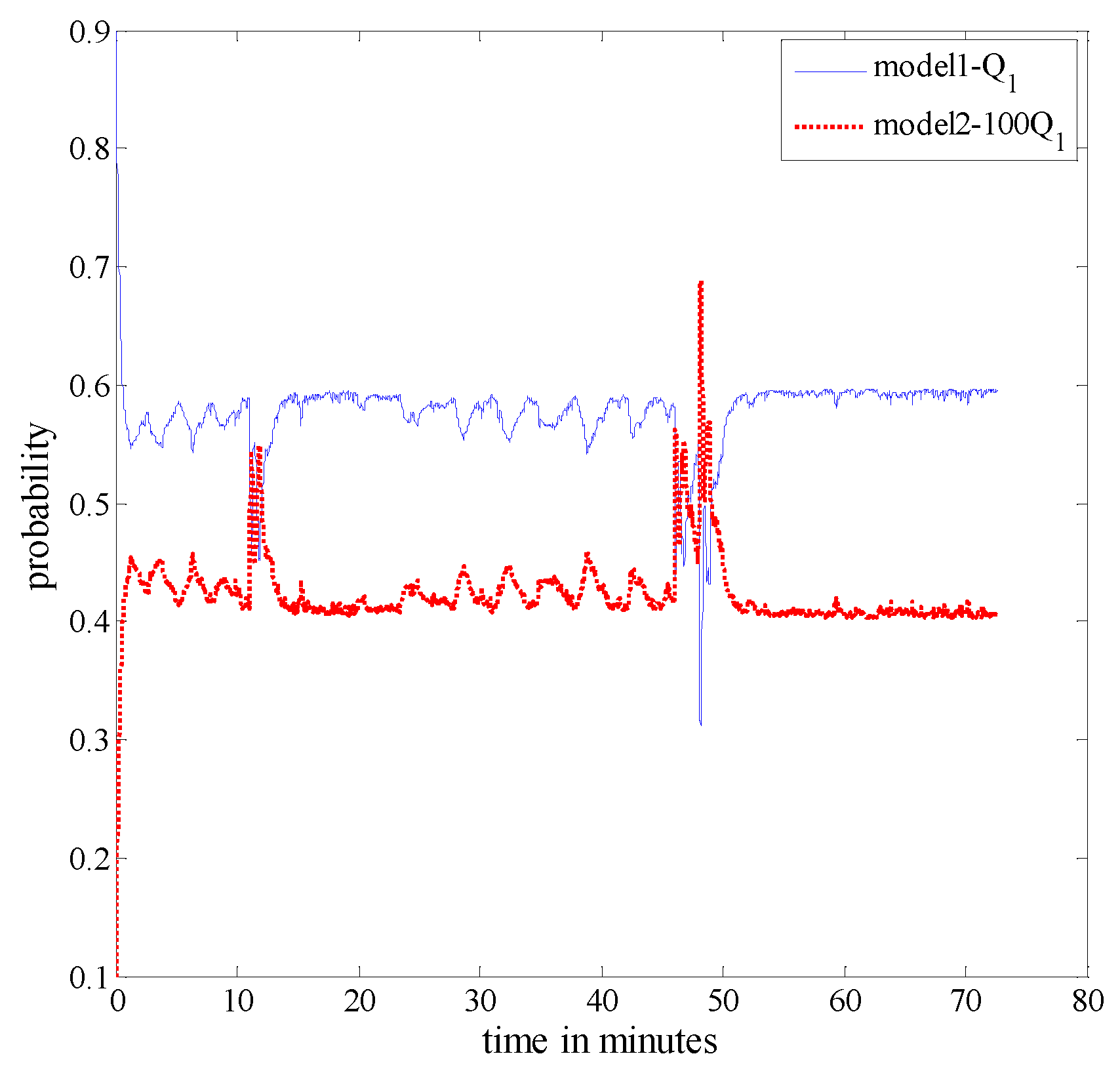
First, we define a two level process noise covariance as the system model uncertainties under low and high manoeuvres; with the idea of the IMM algorithm, we use the IMM to predict estimates without the measurement update as the fault detection reference. Thus, the uncertainty of the system will be adjusted by the model probabilities adaptively with the aircraft manoeuvre.
To address the problem of incorporating corrupted state propagators for fault detection purposes, the paper designs two state propagators’ chi-square fault detection procedure for the SINS/GPS/BD2/CNS integrated navigation system. We develop two IMM predict estimates, running in parallel without an update step, as the state propagators. State propagators are alternatively reactivated based on the information they receive from the fusion filter to increase the fault sensitivity of the detection solution.
A fusion strategy is then investigated to realize the fault isolation. In order to use the appropriate measurement to update the model probabilities of the IMM filter, we take advantage of the fault detection information of each measurement and utilize the measurement with the minimum fault detection value to update the model probabilities of the IMM filter. As a result, we can update model probabilities with the optimal measurement, therefore, further increasing the accuracy of the multi-sensor fusion framework.
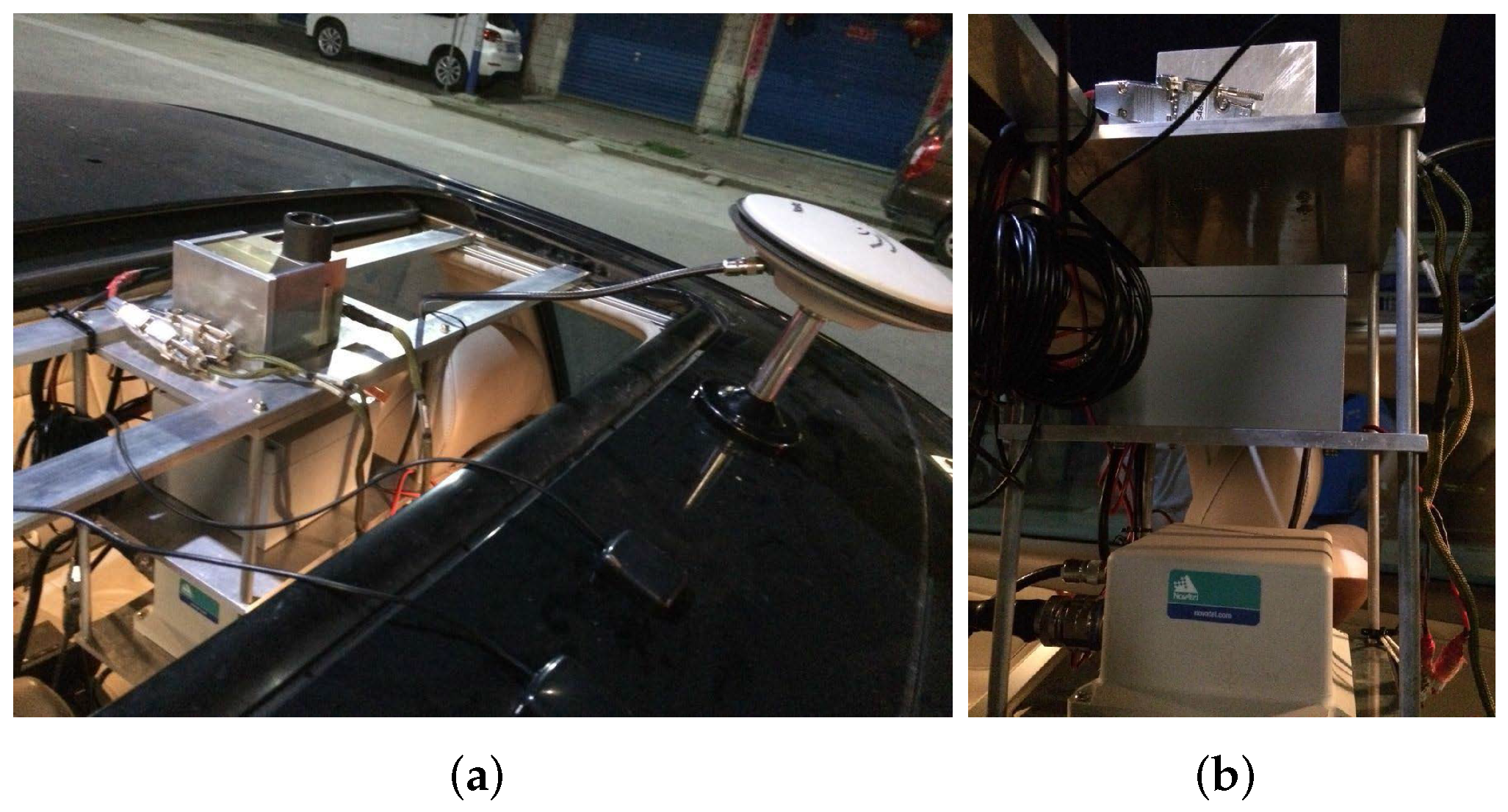
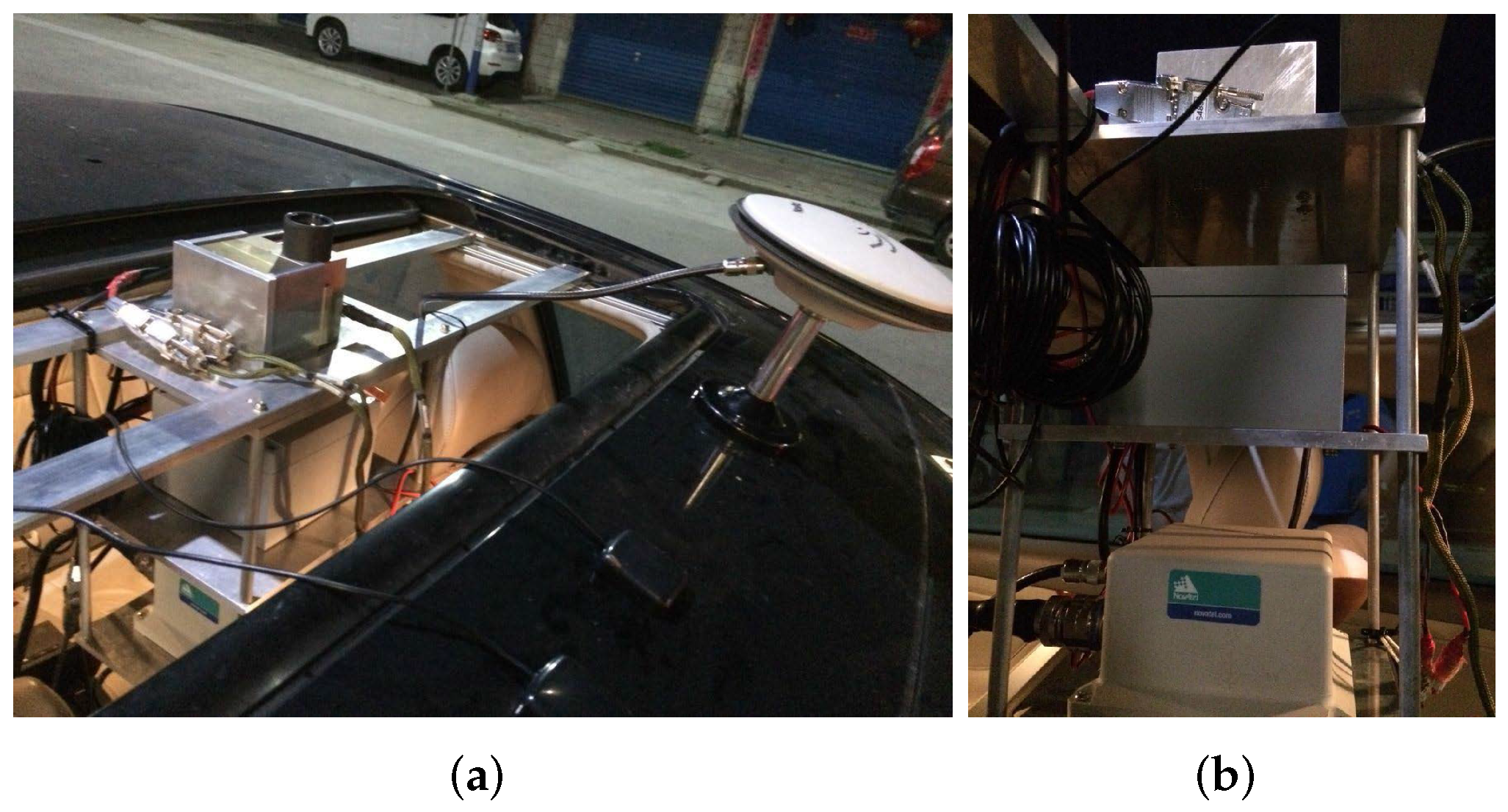
Finally, it is worth mentioning that the proposed fault-tolerant, multi-sensor fusion framework is developed to be implemented, and applied in the real-world settings. In particular as illustrated in
Figure 1, we have completed the hardware design of the INS/GPS/BD2/CNS integrated navigation system and now are working to debug the system and implement the proposed fusion framework.
The rest of the paper is organized as follows.
Section 2 formulates the problem and presents the proposed multi-sensor system architecture together with the state and measurement models.
Section 3 describes the proposed state estimation methodology and presents the proposed failure-tolerant integrated navigation framework. Numerical simulations are performed to verify the performance of the proposed integrated navigation algorithm and presented in
Section 4. Finally,
Section 5 concludes the paper.
2. Multi-Sensor System Architecture
In this section, first we define the state-model of the main system and then form the measurement models for the other involved sub-systems. The SINS is used as the primary/major navigation sub-system while the GPS, the BD2, and the CNS form the remaining three sub-systems. With the Dead-Reckoning (DR) algorithm [
30], we can obtain the position, velocity and the attitude information output from the SINS. The error model of the SINS is a psi-angle error model [
30,
31] given by:
where
is the position error vector;
is the velocity error vector;
Ψ is the attitude error vector;
is the true rate of the local geographic frame with respect to the Earth frame;
is the Earth rate vector with respect to the inertial frame;
is the specific force vector;
is the accelerometer error vector in the body frame;
is the gyro error vector in the body frame;
is the direction cosine matrix;
g is the gravity;
is the radius of the Earth; and term [
] is the skew-symmetric matrix form (also known as the cross-product form [
30]) of vector
. The biases of the accelerometer and the gyroscope are modelled by a first-order Gauss–Markov process with time constants of
τ. Consequently, the state vector includes fifteen states, i.e., three inertial error states in position, velocity, attitude, accelerometer bias and gyro bias and is denoted by:
where superscript T denotes the transpose operator. Note that term
is the bias vector corresponding to the accelerometer, and term
is the gyroscope’s bias vector. This completes our discussion on the state model; next, we present the measurement models of different sub-systems.
System Measurement Models
In order to correct the errors of the SINS sub-system, external measurements are required to calibrate the SINS. As stated previously, in this work we use GPS, BD2 and CNS as the measurement sub-systems, which are then combined with the SINS output to produce the SINS/GPS, SINS/BD2 and SINS/CNS integrated navigation sub-systems. Below, we present details corresponding to each of these three sub-systems:
- (1)
SINS/GPS integrated navigation sub-system: We use the position information outputted from the GPS to calibrate the SINS, therefore, the measurement equation is defined as
, where
is the state vector,
is the measurement noise vector and
is the error vector between the SINS and the GPS given by:
Finally, the SINS/GPS observation model is given by
, where
is a (
) identity matrix, and
is a (
) matrix of all zero elements.
- (2)
SINS/BD2 integrated navigation sub-system: In this configuration, we use the position information provided by the BD2 sub-system to calibrate the SINS which results in the following measurement equation
, where
is the measurement noise vector, and
is the error vector between the SINS and the BD2 which is given by:
Similar to the SINS/GPS scenario, the SINS/BD2 observation model is
.
- (3)
SINS/CNS integrated navigation sub-system: In this scenario, the attitude information calculated by the CNS is used to calibrate the SINS. The measurement equation is, therefore, given by
, where
is the error vector between the SINS and the CNS, which is together with the observation model of this sub-system given by:
where
is the measurement noise vector, and
is the conversion matrix [
4]. This completes our presentation of the measurement models for the three involved sub-systems.
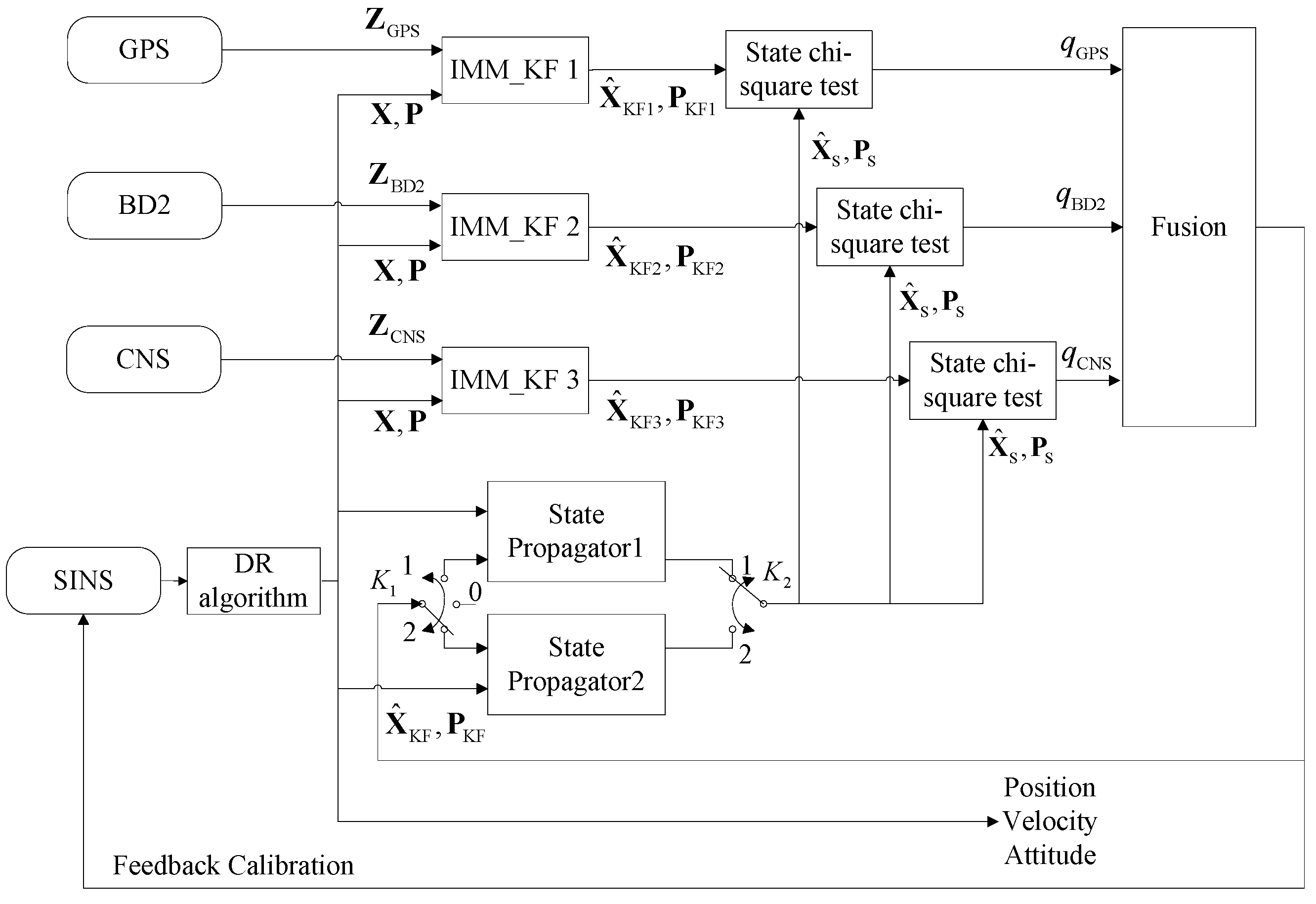
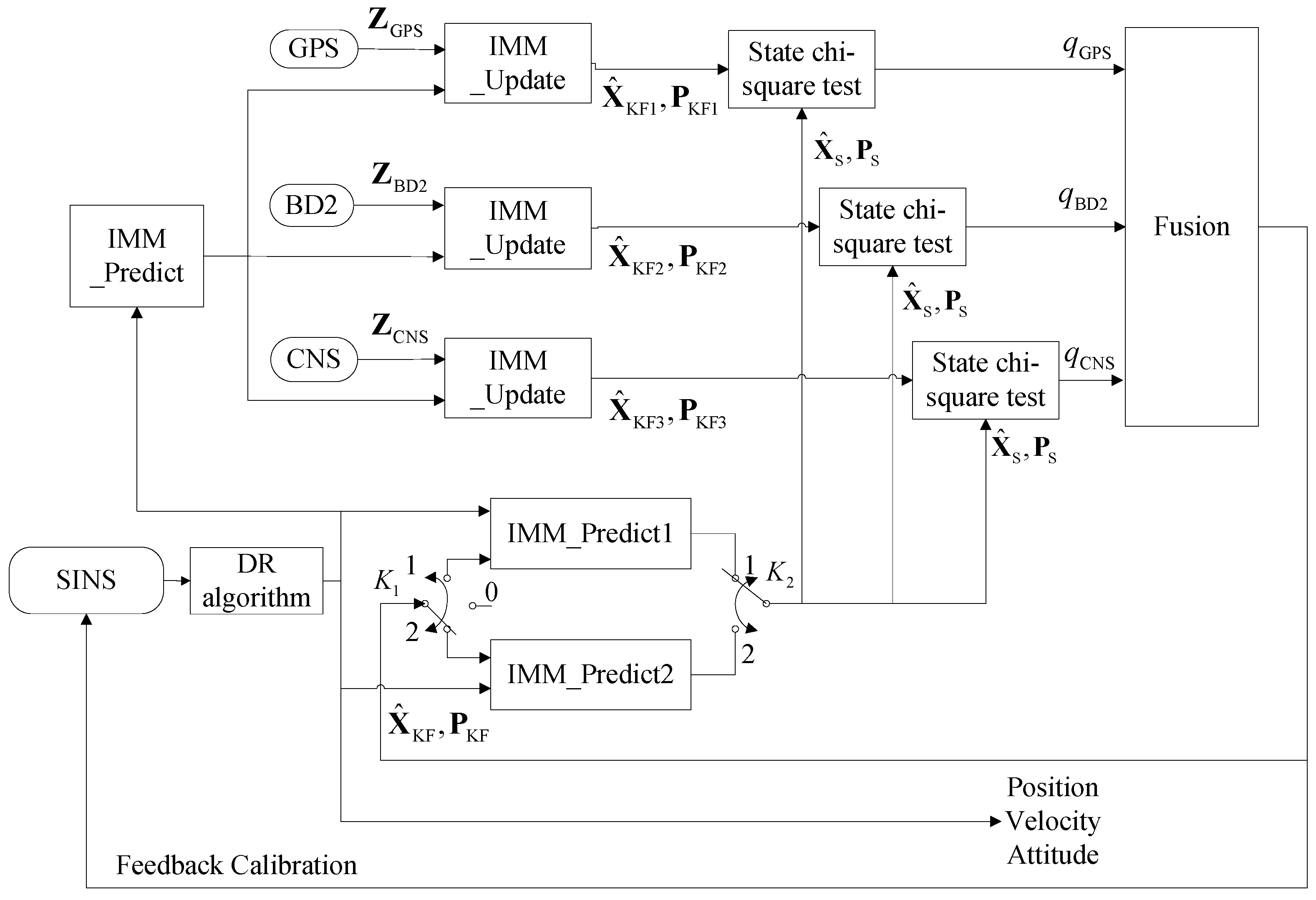
Figure 2 illustrates the architecture of the proposed integrated navigation system, including the four aforementioned sub-systems. In this proposed framework, we use the sensory data obtained from the SINS to calculate the parameters of the system model (Equations (1)–(3)) at every SINS sample interval using the DR algorithm. Then, we can predict the system’s state and its corresponding covariance matrix denoted by
and
in
Figure 2, respectively, using the IMM-predict process described in detail in
Section 3. The IMM predicted estimates without incorporating the measurement update step are used as two state propagators running in parallel. These two state propagators send the state estimate
and its covariance matrix
to every state chi-square test block, which is then used as the detection reference. At every measurement update interval, each measurement sub-system sends its measurement value to the IMM_KF block to update the state estimate and its associated covariance matrix. Each sub-system, then, computes the updated state estimate, denoted by
in
Figure 2 (where
i stands for the corresponding measurement sub-system), and its associated covariance matrix denoted by
and forwards these statistics to its state chi-square test block for failure detection. Each failure detection block computes the failure detection value
corresponding to its measurement sub-system and communicates it to the fusion process to perform failure isolation and data fusion tasks. In order to use the appropriate measurement to update the model probabilities of the IMM filter, we take advantage of the fault detection information of each measurement and use the measurement with the minimum fault detection value to update the model probabilities of the IMM filter. As a result, we can update model probabilities with the most favourable measurement, therefore, further increasing the accuracy of the multi-sensor fusion framework. At every feedback calibration interval, we use the fusion data to calibrate the SINS errors. In order to increase the accuracy of the state propagators, we use the fusion state, denoted by
in
Figure 2, and its associated covariance matrix, denoted by
, to reset the state estimates
and its covariance
. However, because there is usually a time interval between the time when a failure happens and when it is detected, the possibility exists that the state propagator may be contaminated by the fusion data if an undetected failure has already happened. To avoid this problem, we switch
to Position 2 to reset the State Propagator 2; at the same time, we switch
to Position 1 to use the State Propagator 1 as the failure detection reference. At the next switching time step, we switch
to Position 1 to reset the State Propagator 1; at the same time, we switch
to Position 2 to use the State Propagator 2 as the failure detection reference. With this strategy, a newly reset state propagator does not work as the failure detection reference right away. Thus, we can make sure that no failure occurred before resetting the state propagator; this will be discussed in detail later in
Section 3.2. This completes the presentation of the state and observation models. Before further discussions, below, we briefly explain the theoretical challenges encountered in the development of the proposed fusion framework:
- (1)
Incorporation of an appropriate measurement to update the modal probabilities of the IMM filter is the first theoretical challenge faced in development of the proposed multi-sensor fusion framework. To address this challenge, we combine the failure detection algorithm and the IMM filter and utilize fault detection values to perform the update step of the IMM filter.
- (2)
The second theoretical challenge is how to isolate a failed measurement adaptively. The value of the state chi-square test obtained from each sub-system is incorporated in the fusion framework to overcome this challenge and isolate a failed measurement.
- (3)
The third theoretical challenge is the selection of the failure threshold. It is theoretically difficult to find the optimum threshold that minimizes the false alarm rate and at the same time provides optimal accuracy for detecting soft failures. If the threshold is too small, the false alarm rate will be increased, on the other hand with a large threshold, it would be difficult to detect soft failures. To address this issue, we set the threshold as a function of the fault detection values with a bottom boundary and a top boundary. In other words, when the detection value is below the bottom boundary, the sensor’s measurement is accepted, and when the detection value exceeds the top boundary, it is rejected. When the detection value is between the two boundaries, the fault degree of the measurement is computed as a function of the detection value (fuzzy-based solution).
- (4)
The forth challenge is how to isolate a failure adaptively based on the proposed failure detection framework. Here, because the detection threshold is defined as a function of the detection value, it is not possible to isolate a failed sensor simply by comparing it with a predefined threshold. To address this challenge, first, we define the validation probability of each measurement as a function of its corresponding failure detection values. Then, an adaptive weight for each sub-system is calculated based on its validation probability. Finally, the failure detection is performed adaptively through the calculated weights.
3. Failure-Tolerant Integrated Navigation Framework
As stated previously, [
14] proposed an efficient way to improve the failure sensitivity of the detection algorithm by the incorporation of two state propagators. However, when this method is being incorporated into an integrated navigation system, the failure sensitivity of the detection solution degrades significantly due to difficulties in maintaining complete/precise knowledge of the state model. An efficient way to take this into account is to consider a nominal model affected by uncertainty; however, the uncertainty will change under different levels of manoeuvres. In order to improve failure detection sensitivity due to model uncertainty, we propose to combine the IMM filter and chi-square test (the failure detection algorithm). Utilization of the IMM algorithm makes it possible to tune an appropriate value for the covariance matrix of the state-noise in order to maintain acceptable estimation accuracy. However, when the IMM filter is applied to the failure detection algorithm, because it updates the probability of each model using received measurements, the detection results could be adversely affected by failed measurements. In other words, it is hard to detect soft failures of the measurements. To solve this problem, we refer to the method proposed in [
14], where two state propagators were used as test references. These two state propagators are alternatively reset based on the data provided by the fusion result to increase their accuracy. By choosing a suitable time interval between resetting a state propagator and using it for the failure detection reference, the risk of updating each model by failed measurements will be avoided, and thereby, the failure detection sensitivity will be increased. In the development of the proposed IMM-based fault detection/fusion framework, we use the following difference equations:
where (
) is the time index,
and
represent the state vector and process noise vector, respectively, and
and
are the measurement vector and the measurement noise vector, respectively. Vectors
and
are zero-mean Gaussian white sequences and have zero cross-correlation, i.e.,
,
, and
, for all
i and
k, where
is the process noise covariance matrix at time
k, and
is the measurement noise covariance matrix at time
k. The symbol
stands for the Kronecker delta function. Details of combining the IMM-KF and state chi-square test will be presented in the following sub-sections, respectively.
3.1. Local IMM-KF Estimation Algorithm
The proposed SINS/GPS/BD2/CNS integrated navigation system consists of three local IMM-KFs as shown in
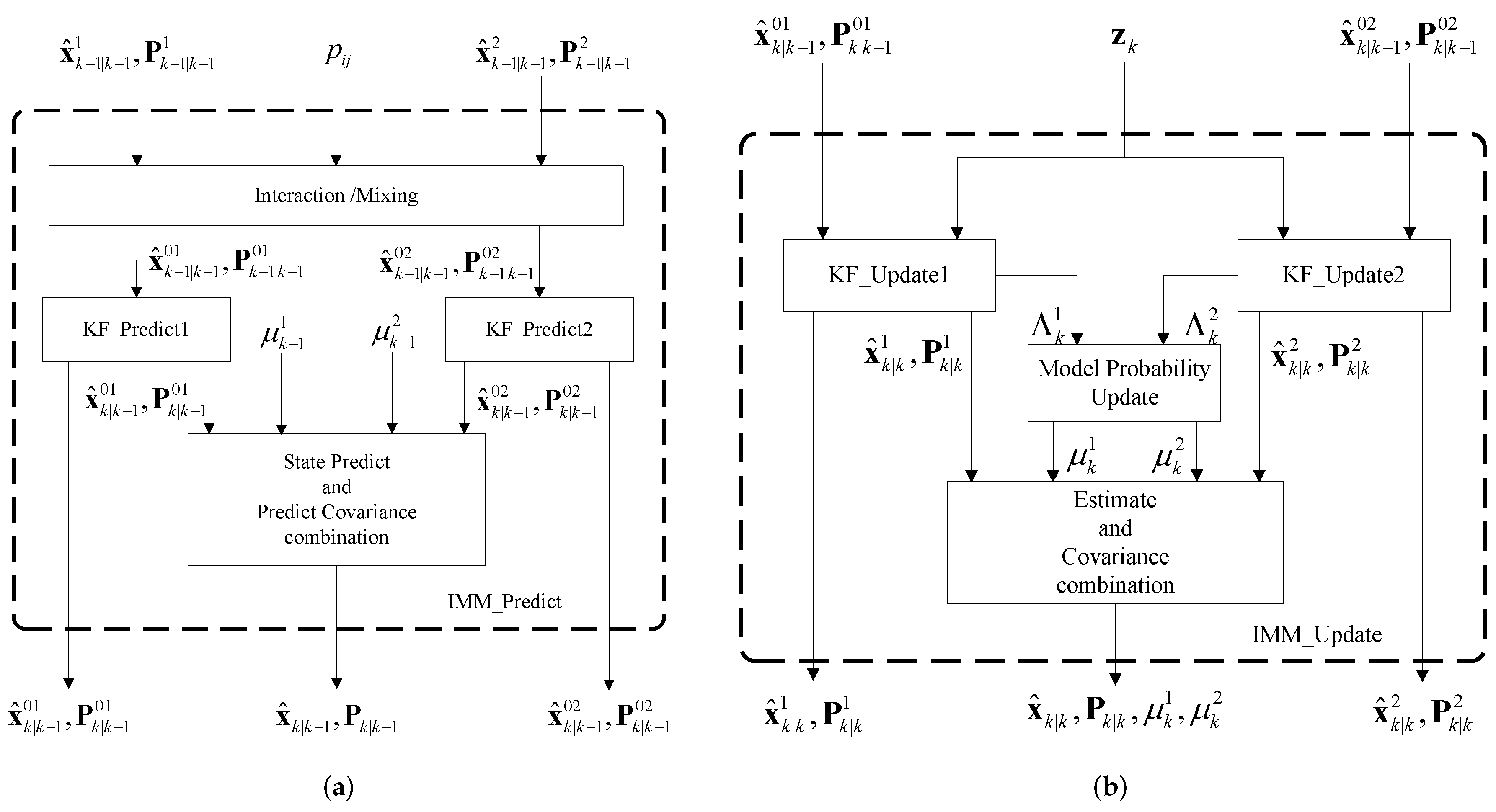
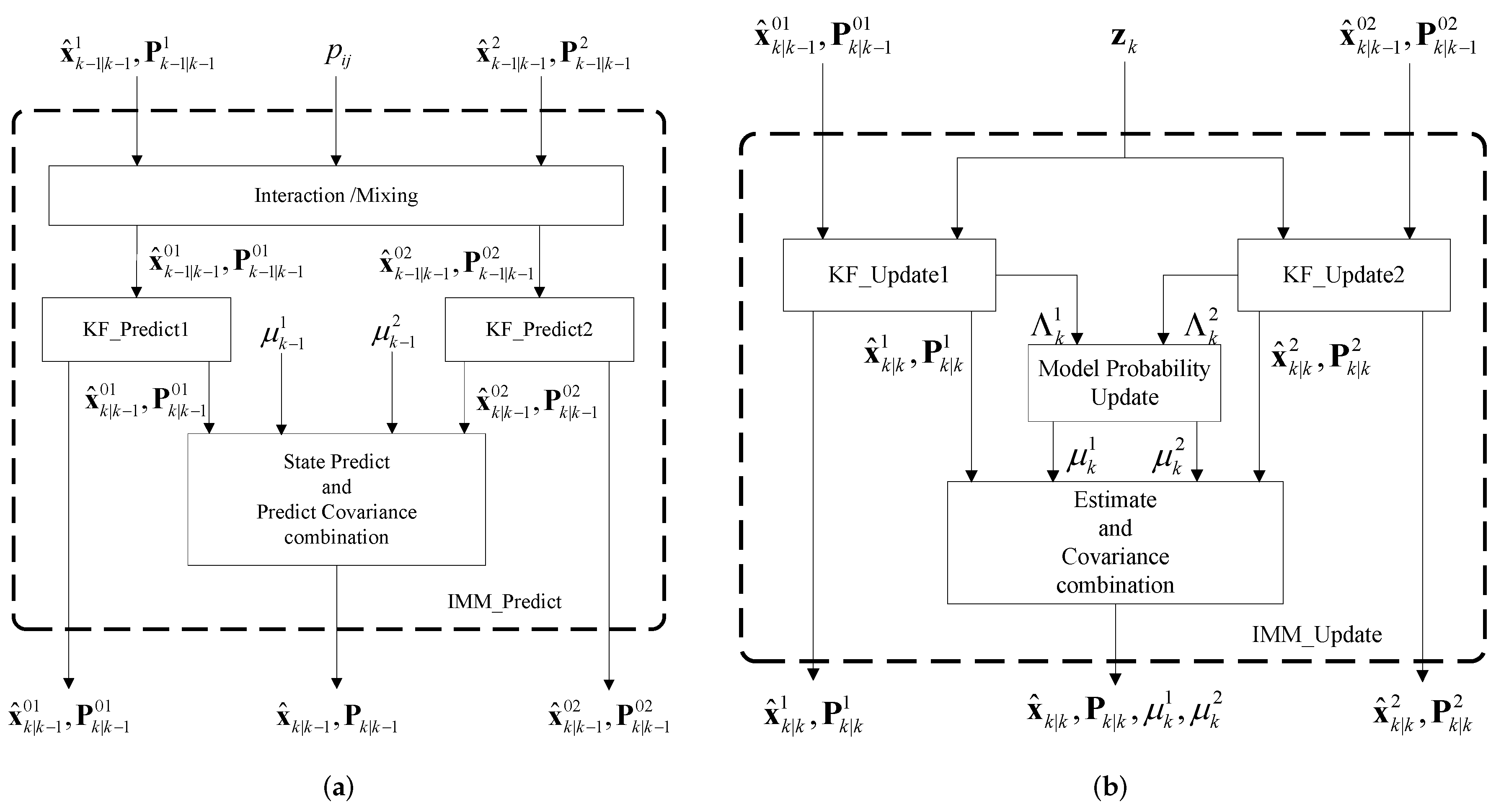
Figure 2. Each filter performs prediction and update steps sequentially based on GPS, BD2 or CNS measurements. One iteration of the IMM-KF consists of two steps, i.e., IMM-predict and IMM-update.
Figure 3a illustrates different steps of the IMM-predict as described below:
Interaction/mixing step: The mixing probability
for models
and
are calculated as
and
, where
is the probability of model
being in effect at the time step (
),
is a normalization factor, and
is the model transition probability matrix which is given by
. The mixed inputs (i.e., state estimates and their corresponding covariance matrices) for each filter are computed as follows
where
refers to the model number.
Mode-matched prediction step: In this step, the KF matched to mode j, for (), computes the predicted state estimate and its corresponding covariance matrix as and .
Global prediction step: The predicted statistics of the mode-matched KFs are combined as follows to form the global predicted state estimate and its corresponding covariance matrix
This completes the prediction step (referred to as IMM-predict) of the IMM-KF filter.
Figure 3b illustrates different steps of the IMM-update algorithm as described below:
Mod-matched KF update (KF-update): The KF matched to mode j, for (), updates the following parameters ; ; ; , and; , where denotes the distribution of a Gaussian random variable a with mean b and variance/covariance c. Term is the likelihood function corresponding to measurement j. Note that, each of the three IMM-KFs use their specific observation (, or ) instead of .
Model probability update: The probabilities of model at time step k are calculated as and , where c is a normalization factor.
Estimate and covariance combination: In the final stage of the IMM-update algorithm, the combined estimate for the state mean and covariance matrix is computed as:
This completes the update step (referred to as IMM-update) of the IMM-KF using measurements from GPS, BD2 and CNS. Next, we present the proposed failure detection methodology.
3.2. Failure Detection Methodology
Figure 4 illustrates the block diagram of the proposed failure detection methodology which consists of three state
-test blocks. For presentation purposes, assume that the IMM-Predict 1 and IMM-Predict 2 provide the predicted state estimate
and its associated covariance matrix
, the IMM-update module provides the estimated state
and its associated covariance matrix
after completion of the measurement update step. The failure detection function is defined as follows:
where
n is the dimension of the state vector. Failure of a measurement obtained from each sub-system is tested based on the following detection rule
where the value of
can be obtained from the table of
[
14]. Intuitively speaking, when the IMM filter is incorporated into the failure detection algorithm it would be hard to detect soft measurement failures. This is because the IMM filter updates the probability of each model using the measurement values which gets affected by measurement failures. We design the failure detection process to solve this problem. In this regard, first we define the following time-related variables: (i) the state propagators’ calibration cycle is denoted by
; (ii) the resolution cycle of the SINS is denoted by
; (iii) the measurement update cycle is denoted by
; and (iv) the feedback calibration cycle of the SINS is denoted by
, such that the following conditions are satisfied:
For example,
,
s,
s and
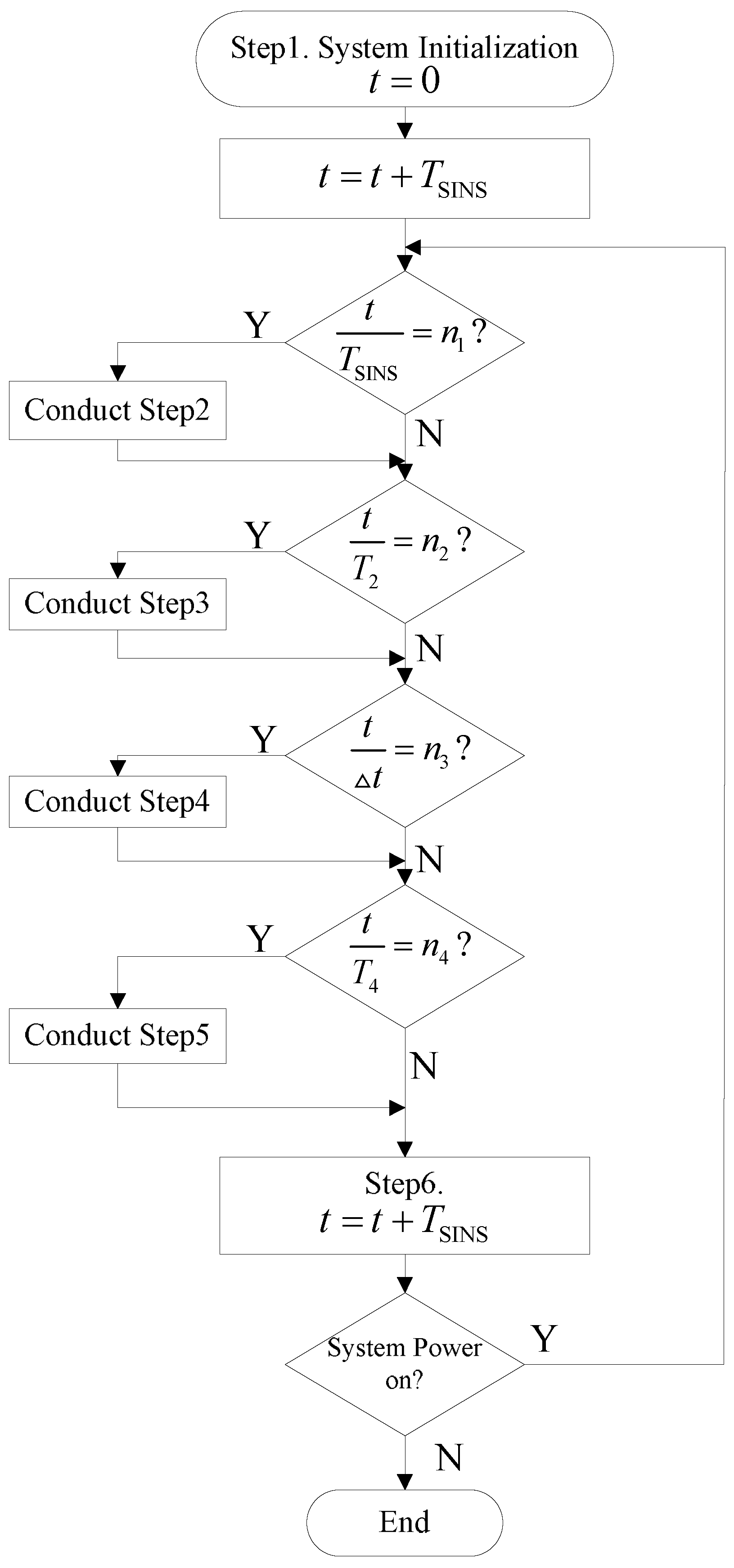
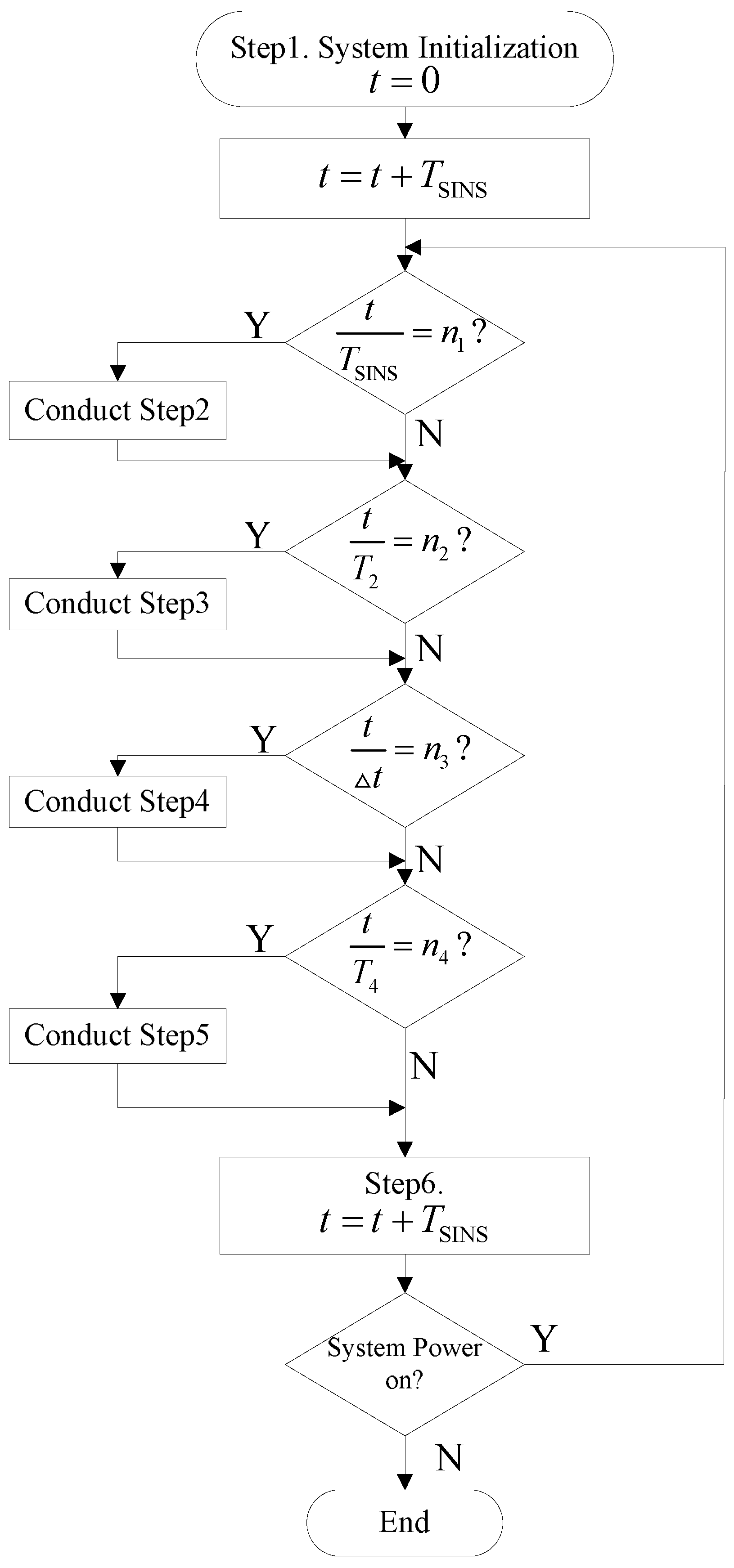
s. The failure detection process is defined in terms of these time-related variables and consists of the following steps:
- Step 1:
System initialization: Let , we switch to “0”, which means that we do not calibrate the state propagators. We switch to “1”, which means we use the and provided from the “IMM-Predict 1” sub-system as the test reference.
- Step 2:
If
, for
, then we conduct the dead-reckoning algorithm of the SINS (denoted as the DR algorithm in
Figure 4).
- Step 3:
If , for , then we update the sub-system with the process “IMM-update", and output the and with each sub-system. We use Equation (12) to calculate the failure detection value q and send q, and obtained from each sub-system to the fusion module to conduct failure isolation and state fusion.
- Step 4:
If , for , and if , for (), we switch to “1”, and let , and , which means that we calibrate the state propagators of “IMM-Predict 1” with the fusion output. Meanwhile, we switch to “2”, which means we use the and outputs from “IMM-Predict 2” as the test reference. If , we switch to “2”, which means that we calibrate the state propagators of “IMM-Predict 2” with the fusion output. Meanwhile, we switch to “1”, to use the and outputs from “IMM-Predict 1” as the test reference.
- Step 5:
If , for , we conduct feedback calibration to the SINS.
- Step 6:
Finally, when , if the system is powered on switch to “Step 2”, otherwise, terminate.
We note that the above algorithm will run based on the inertial measurement units’ sampling time. In practice, this means that the algorithm will run as the system is powered on, therefore, as time increases, the algorithm will run step by step until the system is powered off.
Figure 5 illustrates the flowchart of this algorithm.
Through implementation of the above proposed fault detection approach, we eliminate the risk of updating the probability of each model using contaminated measurements which in turn increases the failure detection sensitivity of the proposed methodology. Next, we present the fusion framework which uses the result from local IMM-KFs together with the fault detection module to form the overall state estimate and its corresponding error covariance matrix at each filtering iteration.
3.3. Information Fusion Framework
In order to combine local estimation results obtained from each sub-system, we expand the fusion method proposed in [
19] to the SINS/GPS/BD2/CNS integrated navigation system incorporating our development in
Section 3.1 and
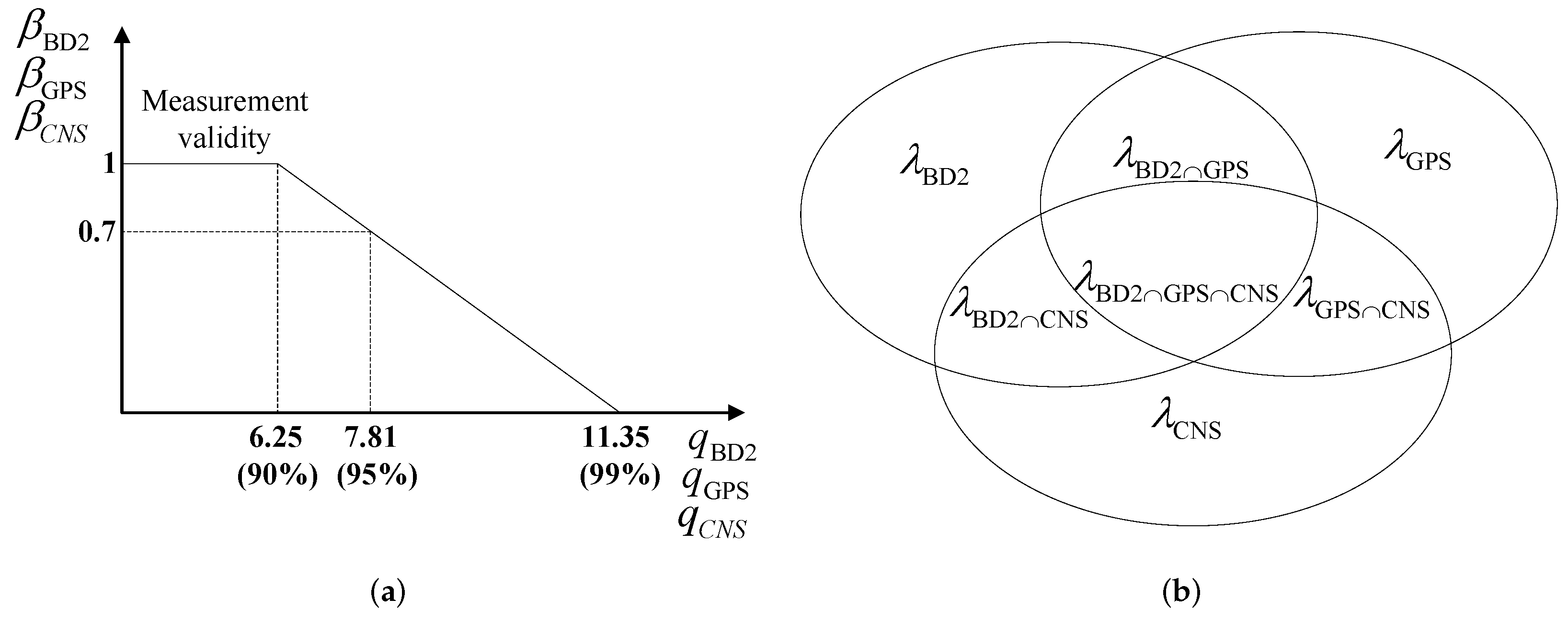
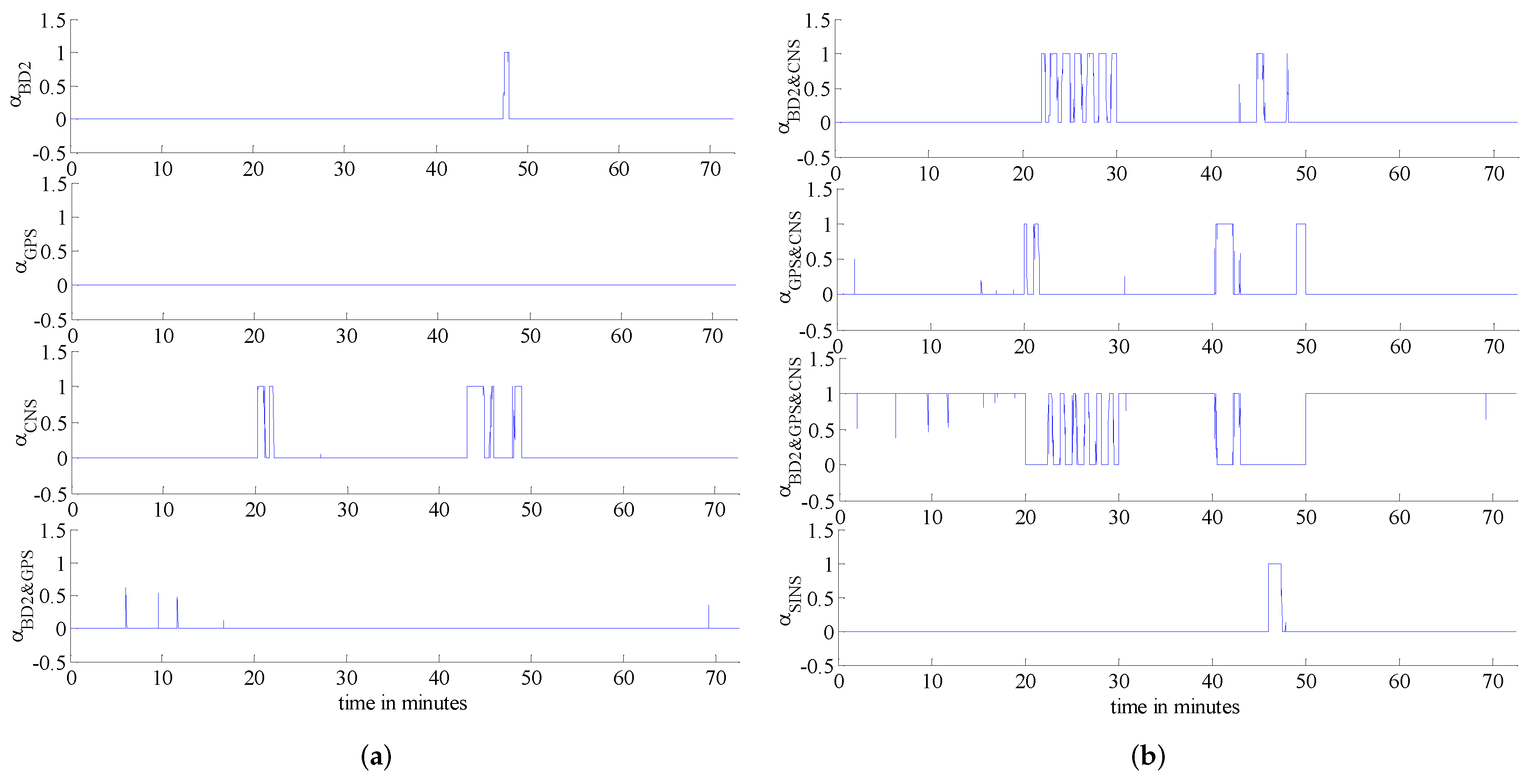
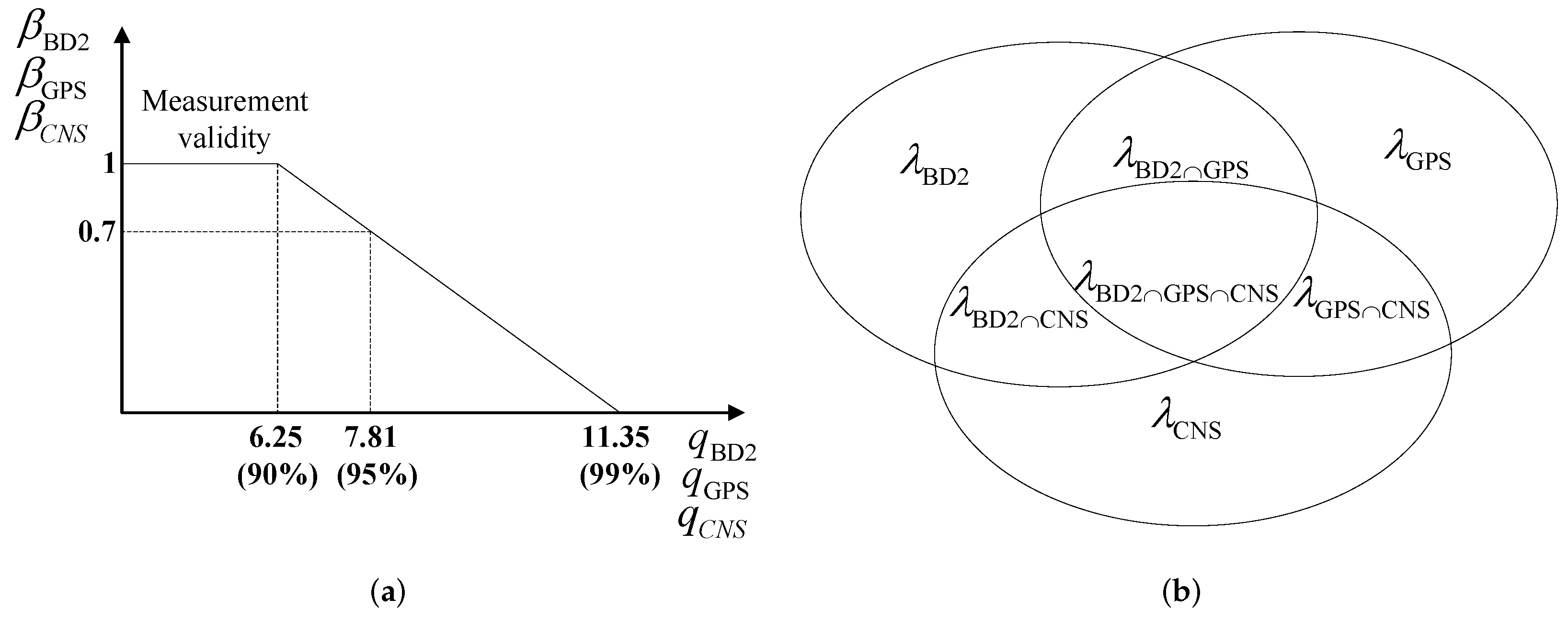
Section 3.2. The modified fusion method is used for isolating measurement failures and fusing state estimates. Besides, information from failure detection modules and measurement update information are used to choose a proper measurement update for the IMM algorithm for updating the probability of each model. The proposed fusion framework computes the overall state estimate and its associated covariance matrix, at each iteration, by forming a weighted average of the state estimates obtained from each local IMM-KF matched to a specific navigation sub-system. The adaptive weights used to fuse local state estimates to form the overall state estimate are defined based on the validation probabilities corresponding to each navigation sub-system as described below. In order to develop the proposed fusion methodology, we define the validation probability of each measurement according to the following fuzzy logic:
The quadratic form
defined in Equation (12) is theoretically a
distribution with three degrees of freedom [
14]. From standard
tables, it is possible to define the validity domains of the each sensor’s measurement depending on the required confidence level, i.e., if the value of
q is beyond a predefined threshold
, then it is assumed that the sensor has failed. In practice, however, it is hard to have a predefined threshold; therefore, we proposed the fuzzy logic solution. From the standard
tables, considering a 90% confidence level and noting that the dimension is three, then
. On the other hand, considering a 99% confidence level, then
. This implies that when
, the sensor is definitely reliable while when
, the sensor has failed. Finally, when
, the sensor is between the state of failure and being reliable. Equation (15) defines the probability of validity as described above. As
Figure 6a illustrates, the validation probability of each measurement is a function of its corresponding failure detection value
q. Based on the validation probability given in Equation (15), the validation probability of each sub-system’s measurement and the validation probability of the integrated sub-systems are defined as follows:
where
denotes the probability that BD2 sub-system is valid. Similarly,
and
denote the validation probability of GPS and CNS sub-systems, respectively. Term
provides the probability that both BD2 and GPS sub-systems are valid at the same time, while
corresponds to the scenario where BD2 and CNS sub-systems are valid at the same time, and
denotes the probability that GPS and CNS sub-systems are valid at the same time. Finally,
defines the probability that all three subsystems (BD2, GPS and CNS) are valid at the same time.
Figure 6b shows, graphically, the probability space specified above. Based on the aforementioned probability space, the weight of each sub-system is calculated as follows
where
refers to the scenario where only the BD2 sub-system is valid. Similarly,
means that only the GPS sub-system is valid, and
means that only the CNS sub-system is valid. On the other hand,
means that the BD2 and the GPS sub-systems are both valid at the same time;
means that the BD2 and the CNS sub-systems are both valid at the same time; and term
means that the GPS and the CNS sub-systems are valid at the same time. Term
means that all three sub-systems (BD2, GPS and CNS) are valid at the same time, while finally, term
means that all three local sub-systems (the BD2, GPS and CNS) have failed at the same time.
The proposed fusion framework computes the overall state estimate and its associated covariance matrix at each iteration by forming a weighted average of the estimates computed from each navigation sub-system, where the weights are the validation probabilities defined above. The state
and covariance matrix
corresponding to the stand-alone scenario based on GPS data are computed from the “IMM-update” of the local IMM-KF matched to the GPS signal as explained previously in
Section 3.1. Similarly, the state and covariance matrix (
and
) corresponding to the stand-alone scenario based on the BD2 data and the ones (
and
) corresponding to the stand-alone scenario based on the CNS data are computed from the “IMM-update” of the local IMM-KF matched to the BD2 and the CNS signals, respectively. The fusion algorithm besides the above estimates also needs the estimates for the remaining four scenarios where instead of having a stand-alone sub-system two or all three of the sub-systems are active (no failure). In the case that the BD2 and the GPS sub-systems are valid at the same time, the state estimate and its corresponding covariance matrix are computed as follows:
where the Kalman gains are given by
On the other hand, when the BD2 and the CNS sub-systems are valid at the same time, the state estimate and its corresponding covariance matrices are given by
where the Kalman gains are computed as
In the case where the GPS and the CNS sub-systems are valid at the same time, the state estimate and covariance update are as follows
where the Kalman gains are given by
Finally, when the BD2, the GPS, and the CNS sub-systems are all valid, the state estimate and its associated covariance matrix are given by
where the Kalman gains are computed as follows
Based on the above set of local state estimates, the final state estimate and its corresponding error covariance matrix are given by
To summarize, the iteration
k of the fusion methodology is performed based on the following seven steps:
- Step 1:
Conduct the “IMM-predict” process.
- Step 2:
Conduct the “IMM-update” process. Here we use the following strategy to update the likelihood of the measurement. We compare the q of each sub-system, which sub-system has the minimum q, then we use the measurement of that sub-system to update the likelihood and thereby obtain the updated probability of the system models.
- Step 3:
Calculate the failure detection value q using Equation (12) for each sub-system.
- Step 4:
Calculate the probability of each measurement sub-system using Equations (15) and (16).
- Step 5:
Calculate the weights of each sub-system using Equation (17).
- Step 6:
Update the state and covariance of each sub-system using Equations (18)–(34).
- Step 7:
Update the overall state estimate and its corresponding covariance matrix using Equations (35)–(36). This completes iteration k of the estimation algorithm.
Note that, the final results computed in Step 7 for iteration k are used as the initial values for the next iteration (), and the estimation process continues sequentially as long as the system is powered on. This completes the development of the proposed multi-sensor fault tolerant information fusion framework, next we present our simulation results carried out to evaluate the performance of the proposed framework.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}