
Step-Detection and Adaptive Step-Length Estimation for Pedestrian Dead-Reckoning at Various Walking Speeds Using a Smartphone

Abstract
:1. Introduction
2. Related Works
3. Walking Distance Estimation Algorithm
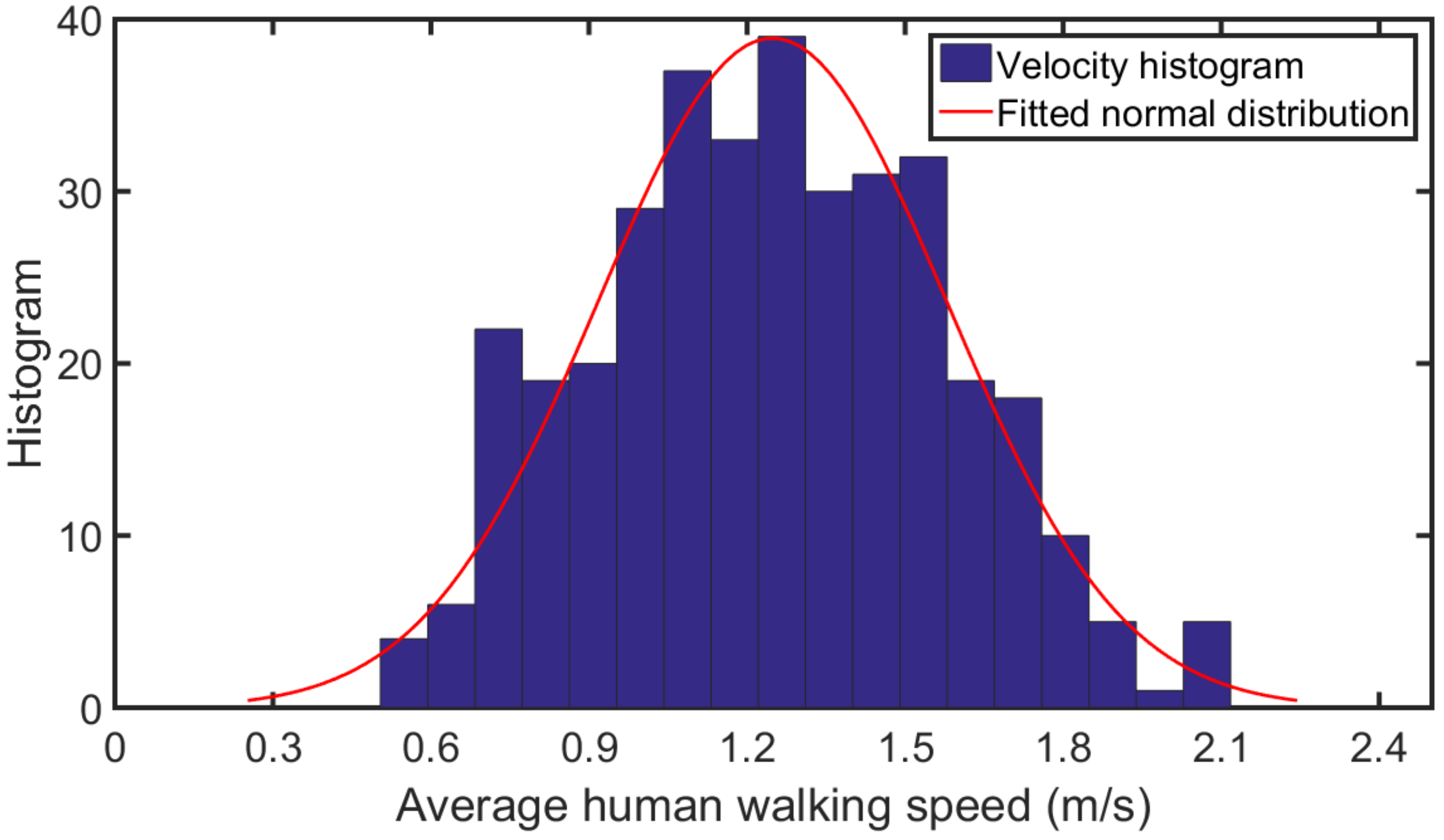
3.1. Experimental Setup and Speed Level Definition
3.2. FFT Operation-Based Data Smoothing
| Algorithm 1 Pseudo code for FFT operation-based data smoothing method |
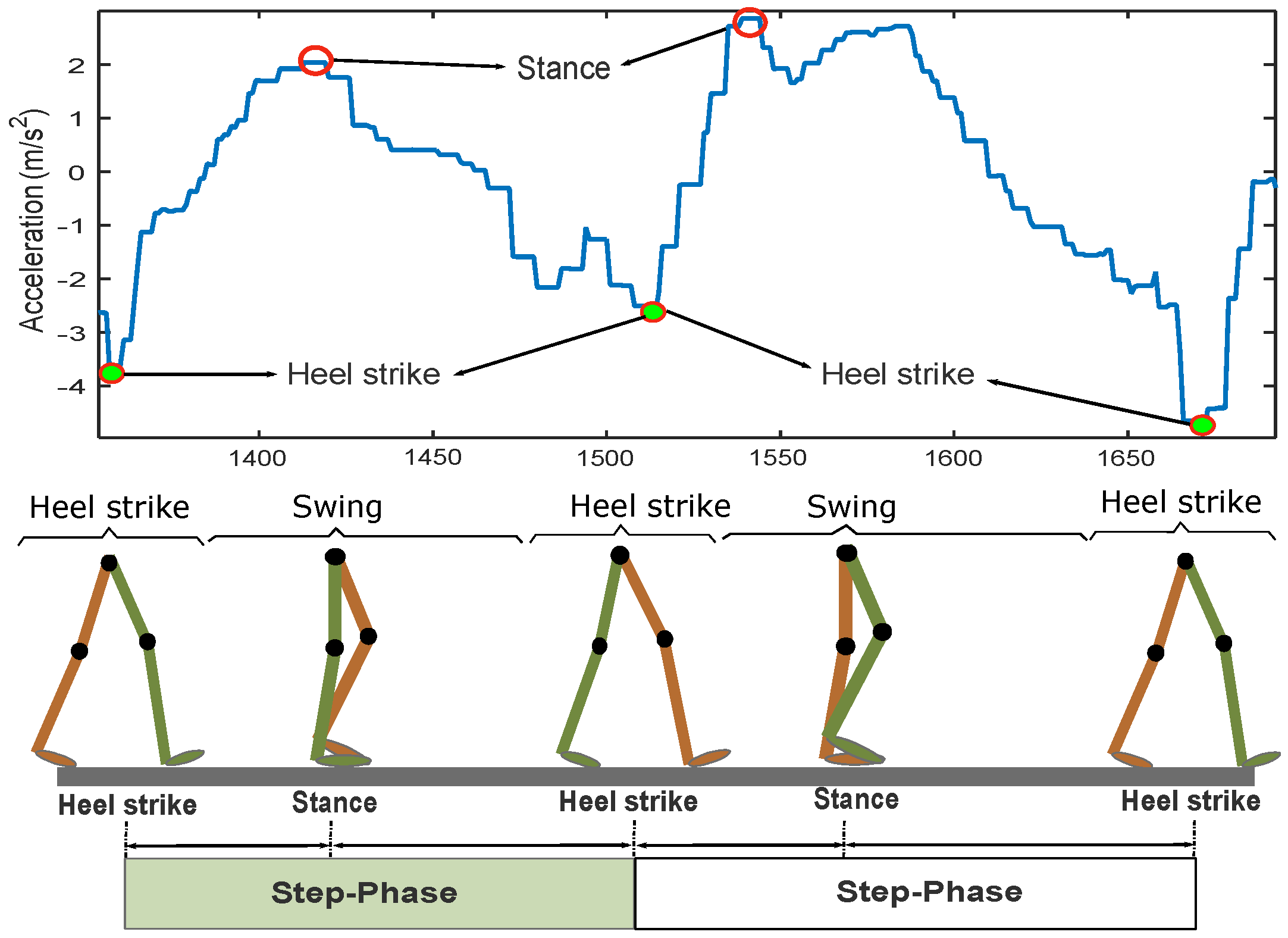
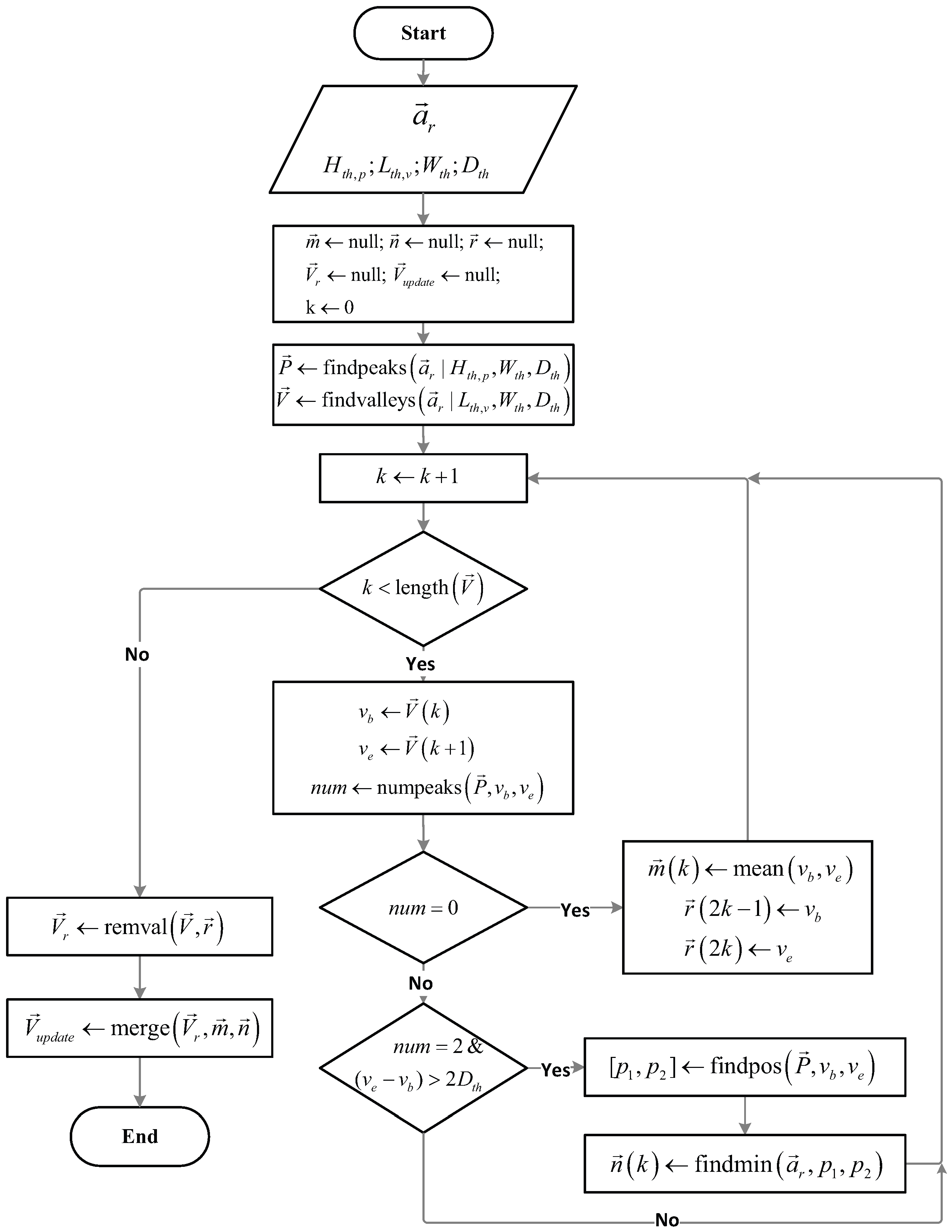
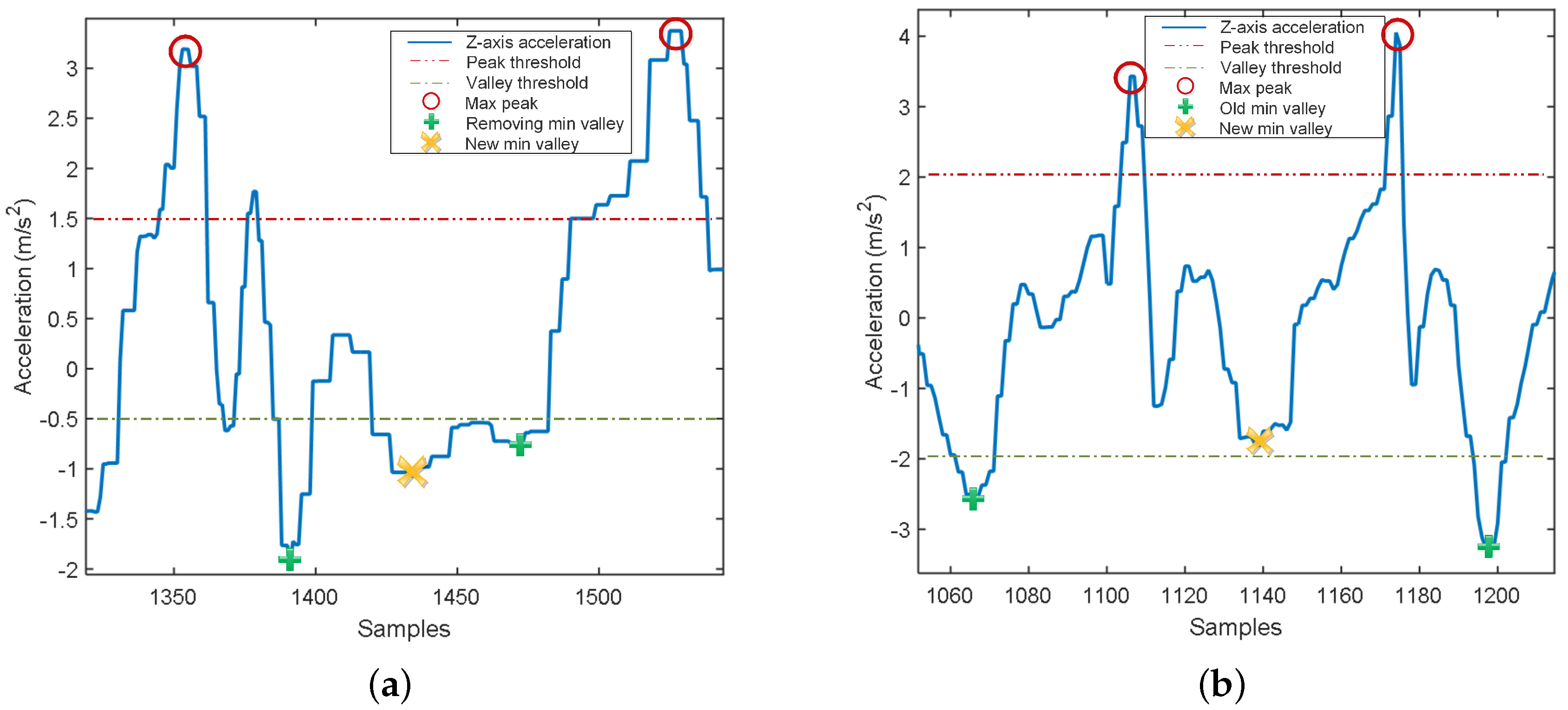
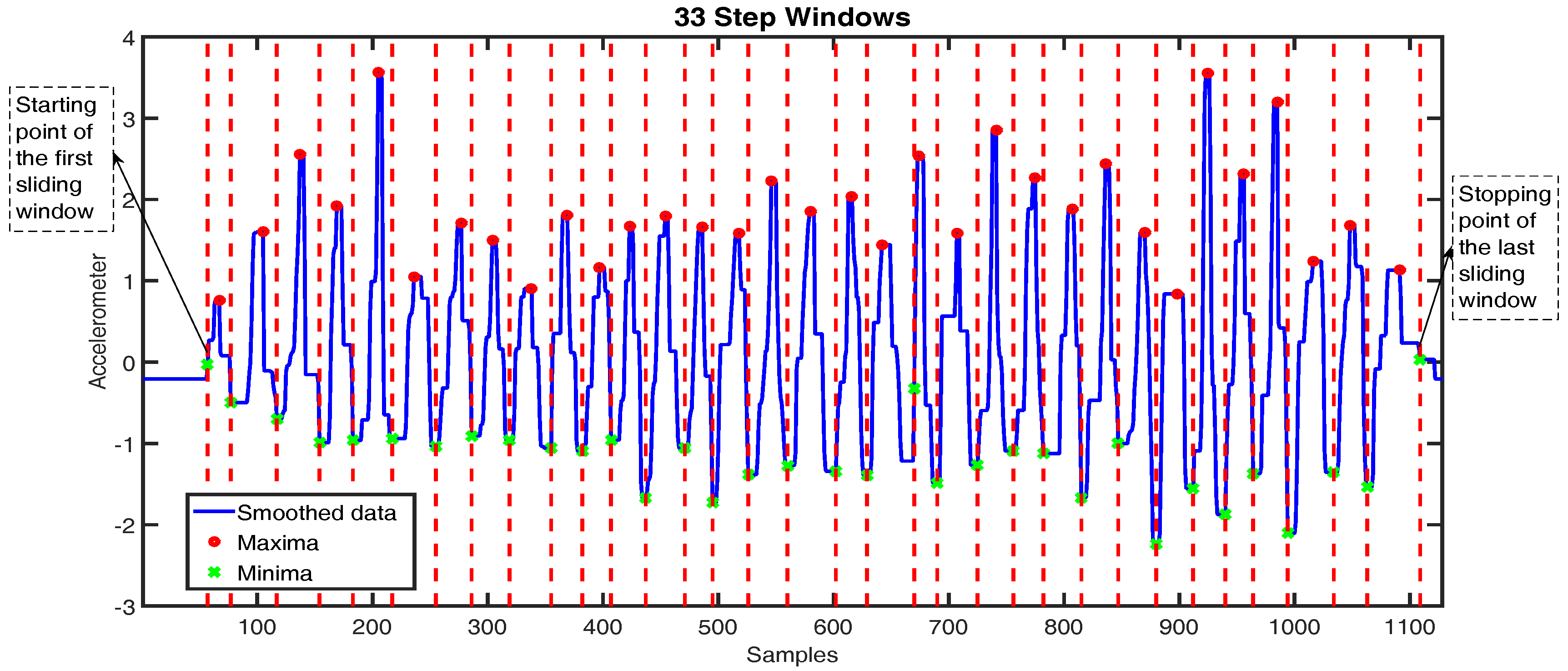
3.3. Step Detection Rules
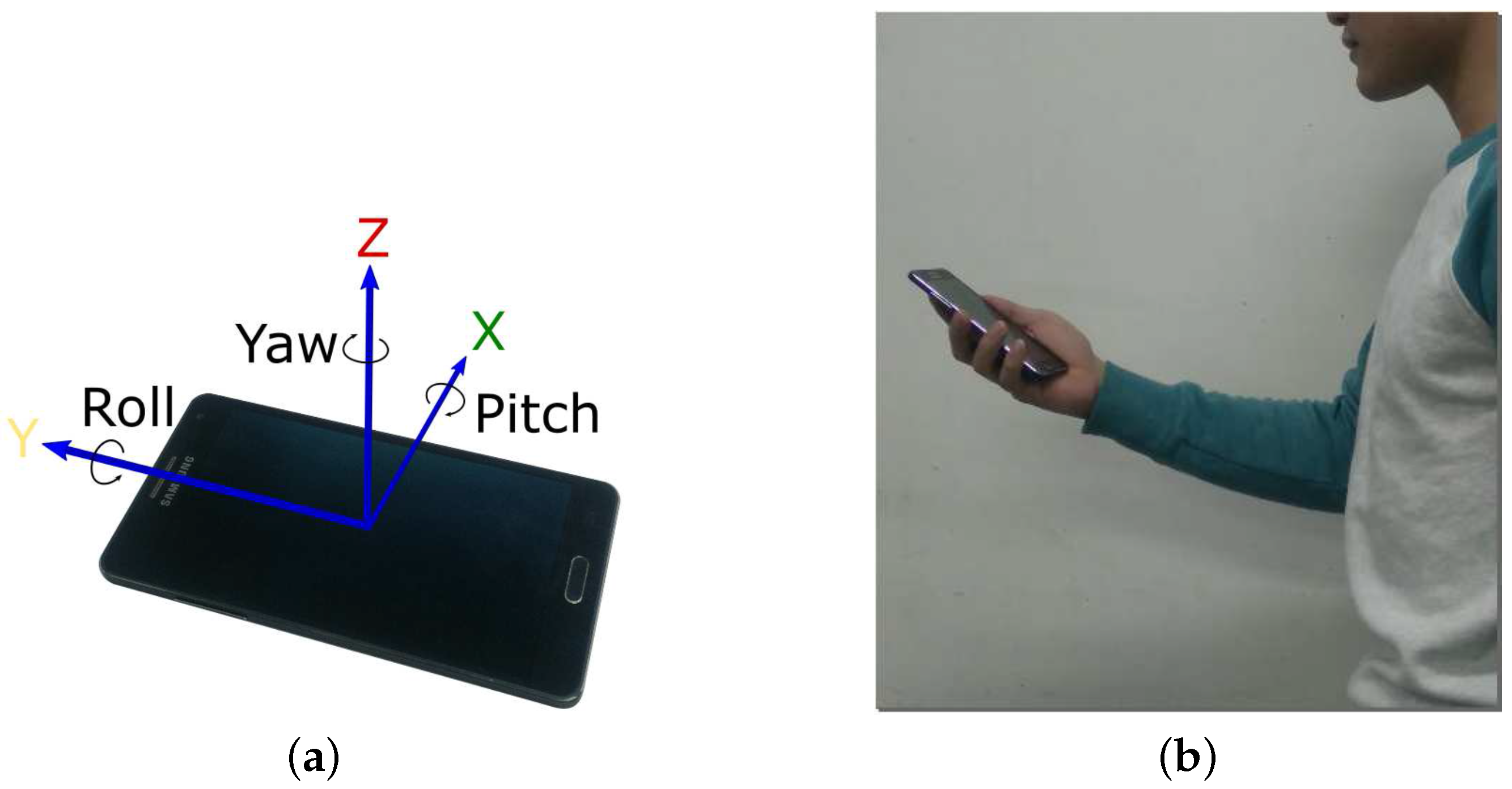
3.4. Coordinate System Transformation Using Euler’s Rotation Theorem
3.5. Adaptive Step Length Based on Unit Conversion
4. Experimental Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mikov, A.; Moschevikin, A.; Fedorov, A.; Sikora, A. A Localization System Using Inertial Measurement Units from Wireless Commercial Hand-Held Devices. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbéliard-Belfort, France, 28–31 October 2013.
- Jirawimut, R.; Ptasinski, P.; Garaj, V.; Cecelja, F.; Balachandran, W. A Method for Dead Reckoning Parameter Correction in Pedestrian Navigation System. IEEE Trans. Instrum. Meas. 2003, 52, 209–215. [Google Scholar] [CrossRef]
- Kim, J.; Jun, H. Vision-based Location Positioning Using Augmented Reality for Indoor Navigation. IEEE Trans. Consum. Electron. 2008, 54, 954–962. [Google Scholar] [CrossRef]
- Wren, T.A.; Gorton, G.E.; Ounpuu, S.; Tucker, C.A. Efficacy of Clinical Gait Analysis: A Systematic Review. Gait Posture 2011, 34, 149–153. [Google Scholar] [CrossRef] [PubMed]
- González-Valenzuela, S.; Chen, M.; Leung, V.C.M. Mobility Support for Health Monitoring at Home Using Wearable Sensors. IEEE Trans. Inf. Technol. Biomed. 2011, 15, 539–549. [Google Scholar] [CrossRef] [PubMed]
- Bylemans, I.; Weyn, M.; Klepal, M. Mobile Phone-Based Displacement Estimation for Opportunistic Localisation Systems. In Proceedings of the Third International Conference on Mobile Ubiquitous Computing, Services and Technologies (UBICOMM ’09), Sliema, Malta, 11–16 October 2009; pp. 113–118.
- Wang, J.S.; Lin, C.W.; Yang, Y.T.; Ho, Y.J. Walking Pattern Classification and Walking Distance Estimation Algorithms Using Gait Phase Information. IEEE Trans. Biomed. Eng. 2012, 59, 2884–2892. [Google Scholar] [CrossRef] [PubMed]
- Chuckpaiwong, B.; Nunley, J.A.; Mall, N.A.; Queen, R.M. The Effect of Foot Type on In-Shoe Plantar Pressure during Walking and Running. Gait Posture 2008, 28, 405–411. [Google Scholar] [CrossRef] [PubMed]
- Alvarez, J.C.; González, R.C.; Alvarez, D.; López, A.M.; Rodríguez-Uría, J. Multisensor Approach to Walking Distance Estimation with Foot Inertial Sensing. In Proceedings of the 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, IEEE Engineering in Medicine and Biology Society, Lyon, France, 23–26 August 2007.
- Weinberg, H. Using the ADXL202 in Pedometer and Personal Navigation Applications; Analog Devices, Inc.: Norwood, MA, USA, 2002. [Google Scholar]
- Jimenez, A.R.; Seco, F.; Prieto, C.; Guevara, J. A Comparison of Pedestrian Dead-Reckoning Algorithms Using a Low-Cost MEMS IMU. In Proceedings of the IEEE International Symposium on Intelligent Signal Processing (WISP), Budapest, Hungary, 26–28 August 2009.
- Abdulrahim, K.; Hide, C.; Moore, T.; Hill, C. Aiding MEMS IMU with Building Heading for Indoor Pedestrian Navigation. In Proceedings of the Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS), Kirkkonummi, Finland, 14–15 October 2010; pp. 1–6.
- Alvarez, D.; Gonzalez, R.C.; Lopez, A.; Alvarez, J.C. Comparison of Step Length Estimators from Weareable Accelerometer Devices. In Proceedings of the IEEE Engineering in Medicine and Biology Society, New York, NY, USA, 30 August–3 September 2006; pp. 5964–5967.
- Tian, Q.; Salcic, Z.; Wang, K.I.-K.; Pan, Y. A Multi-Mode Dead Reckoning System for Pedestrian Tracking Using Smartphones. IEEE Sens. J. 2016, 16, 2079–2093. [Google Scholar] [CrossRef]
- Jahn, J. Comparison and Evaluation of Acceleration Based Step Length Estimators for Handheld Devices. In Proceedings of the International Conference on Indoor Position and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010.
- Kim, J.W.; Jang, H.J.; Hwang, D.-H.; Parket, C. A Step, Stride and Heading Determination for the Pedestrian Navigation System. Positioning 2004, 1, 8. [Google Scholar] [CrossRef]
- Knoblauch, R.; Pietrucha, M.; Nitzburg, M. Field Studies of Pedestrian Walking Speed and Start-up Time. J. Transp. Res. Board 1996, 27, 27–38. [Google Scholar] [CrossRef]
- Bohannon, R.W. Comfortable and Maximum Walking Speed of Adults Aged 20–79 Years: Reference Values and Determinants. Age Ageing 1997, 26, 15–19. [Google Scholar] [CrossRef] [PubMed]
- Al-Obaidi, S.; Wall, J.C.; Al-Yaqoub, A.; Al-Ghanim, M. Basic Gait Parameters: A Comparison of Reference Data for Normal Subjects 20 to 29 Years of Age from Kuwait and Scandinavia. J. Rehabil. Res. Dev. 2003, 40, 361–366. [Google Scholar] [CrossRef] [PubMed]
- Tarawneh, M.S. Evaluation of Pedestrian Speed in Jordan with Investigation of Some Contributing Factors. J. Saf. Res. 2001, 32, 229–236. [Google Scholar] [CrossRef]
- Chandra, S.; Bharti, A.K. Speed Distribution Curves for Pedestrians During Walking and Crossing. Procedia Soc. Behav. Sci. 2013, 104, 660–667. [Google Scholar] [CrossRef]
- Chan, S.H.; Khoshabeh, R.; Gibson, K.B.; Gill, P.E.; Nguyen, T.Q. An Augmented Lagrangian Method for Total Variation Video Restoration. IEEE Trans. Image Process. 2011, 20, 3097–3111. [Google Scholar] [CrossRef] [PubMed]
- Shin, S.H.; Lee, M.S.; Park, C.G. Pedestrian Dead Reckoning System with Phone Location Awareness Algorithm. In Proceedings of the IEEE/ION Position Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010.
- Gusenbauer, D.; Isert, C.; Krosche, J. Self-Contained Indoor Positioning on off-the-Shelf Mobile Devices. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010.
- Shin, S.H.; Park, C.G. Adaptive Step Length Estimation Algorithm Using Optimal Parameters and Movement Status Awareness. Med. Eng. Phys. 2011, 33, 1064–1071. [Google Scholar] [CrossRef] [PubMed]
- Lan, K.-C.; Shih, W.-Y. Using Smart-Phones and Floor Plans for Indoor Location Tracking-Withdrawn. IEEE Trans. Hum.-Mach. Syst. 2014, 44, 211–221. [Google Scholar]
- Palais, B.; Palais, R.; Rodi, S. A Disorienting Look at Euler’s Theorem on the Axis of a Rotation. Am. Math. Mon. 2009, 116, 892–909. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Speed Level | 10 m | 20 m | 30 m | 40 m | Average | |
|---|---|---|---|---|---|---|
| Low | Mean ± Std (m/s) | 0.94 ± 0.06 | 0.93 ± 0.04 | 0.93 ± 0.03 | 0.95 ± 0.02 | 0.937 ± 0.040 |
| Step length (m) | 0.57 | 0.60 | 0.62 | 0.59 | 0.595 | |
| Normal | Mean ± Std (m/s) | 1.35 ± 0.03 | 1.36 ± 0.04 | 1.37 ± 0.04 | 1.36 ± 0.04 | 1.360 ± 0.037 |
| Step length (m) | 0.70 | 0.67 | 0.70 | 0.69 | 0.690 | |
| High | Mean ± Std (m/s) | 1.72 ± 0.11 | 1.70 ± 0.04 | 1.69 ± 0.04 | 1.69 ± 0.04 | 1.700 ± 0.065 |
| Step length (m) | 0.81 | 0.82 | 0.78 | 0.78 | 0.797 | |
| Method | Distance (m) | Low Speed | Normal Speed | High Speed | Average Error (%) | |||
|---|---|---|---|---|---|---|---|---|
| Error (%) | Std (m) | Error (%) | Std (m) | Error (%) | Std (m) | |||
| Weinberg [10] | 10 | 16.95 | 1.16 | 17.94 | 0.69 | 24.03 | 0.67 | 19.64 |
| 20 | 21.44 | 1.87 | 20.67 | 1.72 | 25.62 | 1.27 | 22.57 | |
| 30 | 16.71 | 2.45 | 21.56 | 1.97 | 26.42 | 1.91 | 21.56 | |
| 40 | 19.00 | 2.64 | 22.01 | 2.81 | 27.61 | 2.45 | 22.87 | |
| Kim et al. [16] | 10 | 22.59 | 1.22 | 18.54 | 0.74 | 20.17 | 0.82 | 20.43 |
| 20 | 26.05 | 1.87 | 20.53 | 2.03 | 22.55 | 1.42 | 23.04 | |
| 30 | 22.10 | 2.01 | 21.55 | 2.57 | 23.30 | 2.50 | 22.31 | |
| 40 | 23.42 | 2.56 | 22.32 | 3.13 | 24.73 | 2.84 | 23.69 | |
| Tian et al. [14] | 10 | 14.36 | 1.91 | 10.86 | 0.99 | 7.25 | 0.91 | 10.82 |
| 20 | 15.48 | 3.64 | 8.16 | 2.42 | 10.53 | 2.39 | 11.24 | |
| 30 | 11.34 | 3.60 | 11.03 | 3.12 | 11.74 | 3.45 | 11.37 | |
| 40 | 19.48 | 4.83 | 13.15 | 3.26 | 20.13 | 6.72 | 17.58 | |
| Proposed Method | 10 | 4.76 | 1.31 | 4.44 | 0.87 | 5.06 | 1.13 | 4.89 |
| 20 | 4.51 | 1.86 | 4.78 | 1.84 | 4.15 | 1.69 | 4.48 | |
| 30 | 4.52 | 2.91 | 4.51 | 2.41 | 4.63 | 2.43 | 4.55 | |
| 40 | 4.32 | 2.15 | 4.46 | 3.22 | 3.81 | 2.94 | 4.19 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ho, N.-H.; Truong, P.H.; Jeong, G.-M. Step-Detection and Adaptive Step-Length Estimation for Pedestrian Dead-Reckoning at Various Walking Speeds Using a Smartphone. Sensors 2016, 16, 1423. https://doi.org/10.3390/s16091423
Ho N-H, Truong PH, Jeong G-M. Step-Detection and Adaptive Step-Length Estimation for Pedestrian Dead-Reckoning at Various Walking Speeds Using a Smartphone. Sensors. 2016; 16(9):1423. https://doi.org/10.3390/s16091423
Chicago/Turabian StyleHo, Ngoc-Huynh, Phuc Huu Truong, and Gu-Min Jeong. 2016. "Step-Detection and Adaptive Step-Length Estimation for Pedestrian Dead-Reckoning at Various Walking Speeds Using a Smartphone" Sensors 16, no. 9: 1423. https://doi.org/10.3390/s16091423