1. Introduction
Initial alignment is a crucial procedure of strapdown inertial navigation systems (SINS), and high precision of the initial alignment for SINS is needed to keep the stability of SINS [
1,
2,
3]. The traditional initial alignment can be divided into two major categories: one is the transfer alignment, which needs external information from other navigation devices; the other one is self-alignment, which can accomplish the initial alignment by using the gravitational attraction and the self-rotation of the Earth [
4]. Within the frame of the former category, it may be achieved quite simply by the direct copying of data from the external navigation system, and more precisely with methods of an inertial measurement matching process, but this requires other complex systems and may ignore the self-contained advantages of SINS. Thus, the self-alignment method, which is the second category, is the hot topic of SINS, and many researchers are devoted to improving the performance of the self-alignment.
Typically, the traditional self-alignment method can be accomplished by two stages, i.e., the coarse alignment stage and the fine alignment stage. Within the fine alignment stage, the initial attitude of SINS can be acquired more accurately and, furthermore, other information, such as sensor biases and initial velocity, can be estimated simultaneously [
5,
6,
7]. However, the fine alignment stage can be proceeded by the linear Kalman filter only when the error state model is confined to a small misalignment angle, which can be provided by the coarse stage. With the coarse alignment, the rough attitude of the vehicle can be acquired. In the coarse alignment stage, it is assumed that the position of the vehicle is well known. Then, the Earth’s rotation and gravity can be computed accurately, and the estimation of the initial attitude can be acquired by comparing the computed rotation rates and gravity to the sensed and rated acceleration. Due to the significance of the coarse alignment, the performance of fine alignment can be improved by excellent coarse alignment. Thus, if there is a method which can be better implemented than the traditional coarse alignment in terms of convergence rate, alignment accuracy, and stability of the alignment results, it will be a novel self-alignment which can be applied in some emergency situations, since the fine alignment always needs 20 to 30 min, sometimes more. This is what this paper focuses on.
Many methods have been devised to improve the performance of the self-alignment method, and the common method was dual-vector attitude determination based on the gravitational apparent motion in the inertial frame [
8,
9,
10,
11,
12,
13,
14]. As is well known, the swaying motion of the Earth is composed of two distinct elements: first, the true inertial swaying caused by the motion of the body frame relative to the inertial frame; and second, the apparent angular rate caused by the self-rotation of the Earth. Based on the properties of the swaying motion, Lian and Yan [
8,
9] proposed a method based on the dual-vector attitude determination, and because the acceleration measured by the inertial measurement unit (IMU) axes contains random noises, which contaminate the observation vectors, the alignment time was prolonged and the alignment accuracy was decreased. To address these issues, a reconstruction algorithm for the observation vectors was proposed in [
10,
11,
12]. By adopting the reconstructed observation vectors, the random noises were effectively suppressed. Therefore, the performance of the self-alignment was improved. In [
13], a similar self-alignment based on a fixed integral sliding method was investigated. Lu et al. [
14] extended the method in [
13] to the optimal parameter self-alignment. However, the above dual-vector attitude determination method is not a recursive algorithm, and it is a single-point attitude determination algorithm; that is, it utilizes the observation vectors obtained at two time points and uses them, and only them, to determine the attitude at one time point. With this method, the information contained in the past measurements is lost. In order to take full advantage of all of the observation vectors, a quaternion self-alignment method based on the
q-method was developed in [
15], which utilized the filter quaternion estimation (QUEST) method to process the observation vectors recursively [
16]. Meanwhile, the optimal initial attitude could be calculated by the attitude-quaternion which was extracted by the Newton iteration algorithm from the constructed
K-matrix [
17]. Compared with the dual-vector attitude determination method, the convergence rate and stability of the self-alignment based on the
q-method was improved [
18,
19,
20]. However, the quaternion self-alignment also contained the random noises in the observation vectors, and these defects, which are not beneficial to the self-alignment, have contaminated the observation vectors. In order to denoise the observation vectors and ensure high computational efficiency, a new quaternion self-alignment method using apparent velocity has been designed in this paper; it was inspired by [
21]. Since the integration process averages the measurements over a period of time, the effect of the random noises is reduced and, hence, a stable attitude estimate is obtained. In this paper, this improved scheme is considered as a comparison method for the more advanced self-alignment method.
According to the minimal-variance theory [
22], none of the aforementioned self-alignment methods are optimal. Hinging on the previous results about the quaternion Kalman filter with pseudo-measurements, a Kalman filter is developed, along with a computationally simpler adaptive filtering theory [
23,
24]. Furthermore, the Kalman filtering approach yields, by design, sequential quaternion estimations that are minimum-variance and allows for the estimation of parameters other than attitude in a straightforward manner [
22]. In this work, we develop a novel quaternion self-alignment method. Firstly, the present work introduces a linearized quaternion observation model, and the measurement noise is state-dependent. Nevertheless, the state-dependence of the measurement model induces modeling errors, which will cause filtering divergence. Then, a Kalman filter is designed to deal with the special measurement noises, which is based on adaptive filtering technology. A nice feature of the quaternion self-alignment is that the estimated quaternion is constant, and the computed observation vector has slow-varying characteristics. Therefore, a parameter recognition and observation vector reconstruction algorithm is designed to improve the convergence rate in this work. According to the brute-force normalization of the estimated quaternion, the stability of the filter is improved. Lastly, the performance of this novel self-alignment is firstly checked under the nominal simulated conditions of noise and initial errors, and then the on-line turntable tests are designed to verify the stability and accuracy of the proposed method.
In the following section we will give the principles of the quaternion self-alignment method based on the
q-method, and an improved method based on apparent velocity is designed. In addition, the merits and demerits are also analyzed with simulations. Next, we will describe the novel quaternion self-alignment based on the Kalman filter in detail, and a simulation is designed to evaluate the algorithm. In
Section 4, an improved algorithm based on the novel quaternion self-alignment is developed, and the merits of the methods are analyzed with simulations. Turntable tests are carried out to verify the effectiveness of this novel algorithm in
Section 5. Finally, the major contributions of this paper are summarized in
Section 6.
2. General Quaternion Self-Alignment
The definitions of the coordinate frames used in this paper are described in
Appendix A. It is well-known that the acceleration measured by inertial measurement unit (IMU) axes (
b-frame) is composed of the true inertial acceleration of the vehicle caused by the motion of the
b-frame relative to the
i-frame and the apparent acceleration caused by the gravitational attraction of the Earth. The former element can be compensated by external sensors, such as the Doppler velocity log (DVL) and the global positioning system (GPS), and the apparent acceleration in the
b0-frame, which is named the observation vector, can be calculated by the acceleration measurements and the gyroscope measurements. That is how the true inertial acceleration is compensated. Taking advantage of the known position, the true gravity in the
n0-frame, which is named the reference vector, can be obtained accurately. In this section, general quaternion self-alignment using the
q-method is investigated, and the filter QUEST technology is designed to realize the recursive algorithm. In order to improve the stability of general quaternion self-alignment, an improved method based on apparent velocity technology is designed.
2.1. Mechanism of General Quaternion Self-Alignment
With the rules of quaternion multiplication, the attitude quaternion
from the
b-frame to the
n-frame can be expressed as:
where
is the unknown initial attitude quaternion, and the symbol
used hereafter represents the quaternion product. According to the quaternion kinematic equations, the time-varying quaternion can be updated as:
where
,
is the rotational rates measured in the
b-frame with respect to the
i-frame, and it can be acquired from the gyroscope directly;
indicates the rotational rates measured in the
n-frame, and its theoretical expression is defined as:
where
is the Earth’s rotation rate with respect to the inertial frame, and
denotes the angular rate of the navigation frame with respect to the Earth’s frame. All of the aforementioned parameters can be calculated by the outputs of the GPS. All of the quantities above are functions of time, and, if not stated, their time dependences are omitted for brevity in the following description.
It is noted that the attitude quaternions and can be calculated by Equation (2). If the initial attitude-quaternion is calculated, self-alignment can be accomplished.
The apparent velocity update equation in the
n-frame is known as:
where
denotes the specific force vector, which is described by the
n-frame. Further,
.
is the local gravity.
Because quaternion multiplication can be used in place of matrix multiplication to transform a three-component vector from the
b-frame to the
n-frame, then:
where
denotes the conjugate operation of a quaternion, and
can be measured by the accelerometer.
Substituting Equations (1) and (5) into Equation (4) yields:
Defining the reference vector and observation vector as:
Equation (6) can be rewritten as the observation vectors–based measurement model for
as:
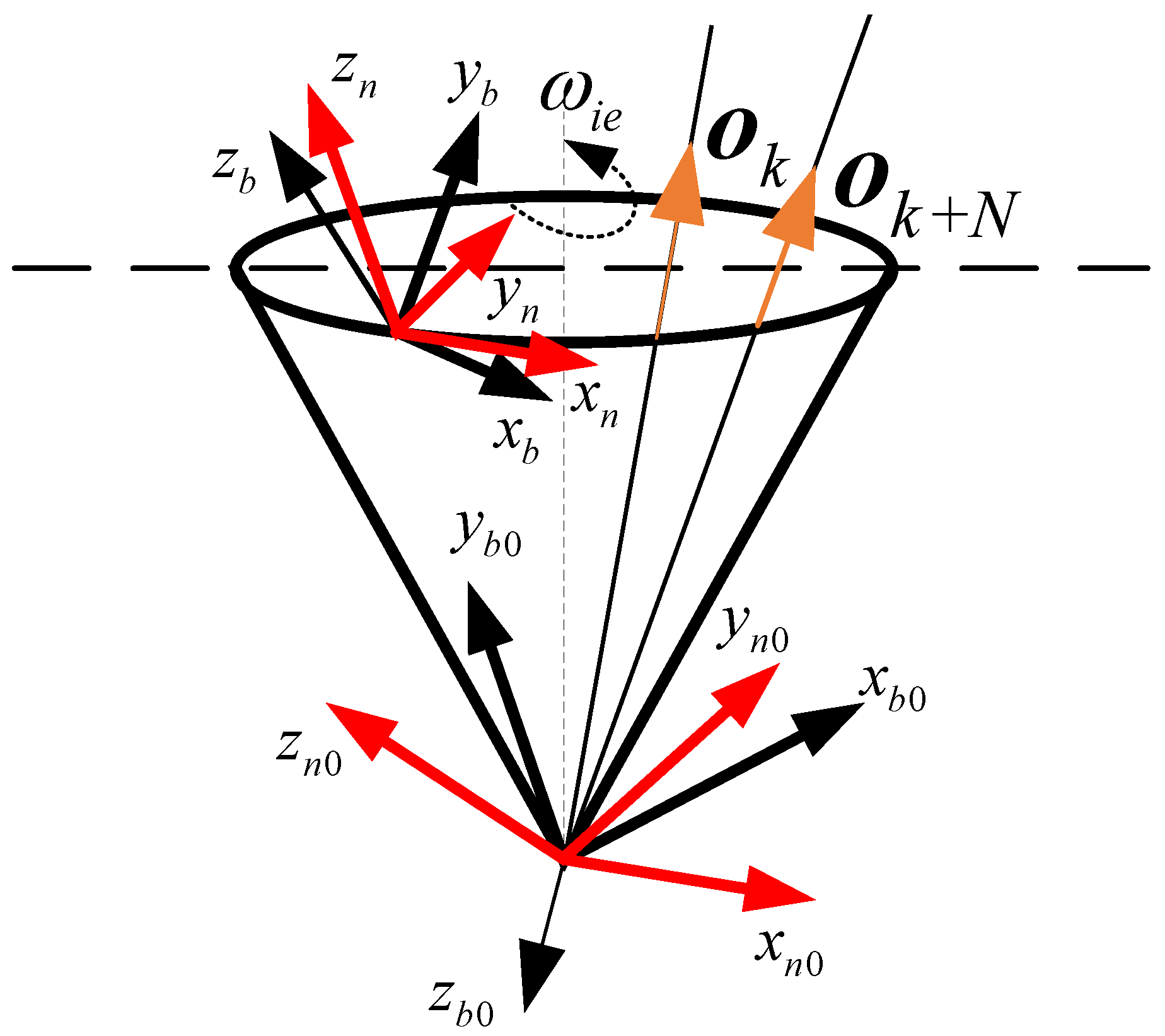
Figure 1 shows the quaternion self-alignment mechanism based on the observation vectors; the frame in red represents the
n-frame and the frame in black represents the
b-frame. In the self-alignment process, the observation vectors
and reference vectors
can be calculated over a period of sampling time, and the quaternion
can be computed in real time. With the known time-varying quaternions
and
, which can be obtained by Equation (2), the attitude quaternion
of the
b-frame with respect to the
n-frame can be calculated by Equation (1). In the following subsection, the traditional method for calculating quaternion
is introduced.
2.2. Attitude Determination Based on the -Method
According to the
q-method, the observation vectors and reference vectors must be normalized, respectively, to keep the normalization characteristic of the constructed
K-matrix [
25]; it has:
where
and
are the normalized reference vectors and the normalized observation vectors, respectively. The subscript
is the discretization scale coefficient.
The normalized
K-matrix is defined as follows:
where:
where
is an arbitrary vector,
denotes the trace operation,
denotes the cross-product matrix. It was shown that
of unity length and
satisfies the equation [
26]:
where the subscript
of
denotes the
-step calculation. It is well-known that
is the maximum eigenvalue of
and
is the eigenvector which corresponds to
.
2.3. An Improved Algorithm for General Quaternion Self-Alignment
In Equation (11), it can be found that there is more effective observation information in the -matrix during the alignment process. Due to the sensitivity of the filter QUEST to random noise, the stability of the results must be poor if the accelerometer measurements are used to construct the observation vector straightforwardly. In order to improve the stability of the alignment results, an improved algorithm based on apparent velocity is designed.
According to Equation (8):
The discrete form of the continuous integration is given by:
where
and
are both set to zero at start-up, because the extracted attitude quaternion between two frames is only related to the directions of the two vectors, and it has no relation to their location when the attitude determination algorithm is used. Then, the new observation vectors
and reference vectors
can be acquired by Equation (14), and the attitude quaternion
at start-up can be recalculated by the filter QUEST method.
2.4. Simulation Test
In this subsection, a simulation test is designed to validate the performance of the general quaternion self-alignment. The whole self-alignment process lasted for 600 s, and the geographic latitude and longitude of the vehicle were
and
. During the simulation test, the vehicle (taking the ship as an example) was assumed to be static but with swinging motions. The swaying rule is
, where
and
are the amplitude and frequency of the swaying, while
and
denote the initial phase and swaying center, respectively. The swaying parameters of this simulation are defined in
Table 1:
With these ideal motions in
Table 1, the truth measurement of the gyroscope and accelerometer can be simulated by the back-stepping of the SINS solution. When the errors in
Table 2 are added into those ideal measurement data, the real inertial sensor outputs can be generated, and the sampling rate of the inertial sensors was 100 Hz in this test. At the same time, those ideal motions can be used as a reference to evaluate the accuracy of the alignment, and the difference between those ideal motions and the alignment results are defined as alignment errors in this paper.
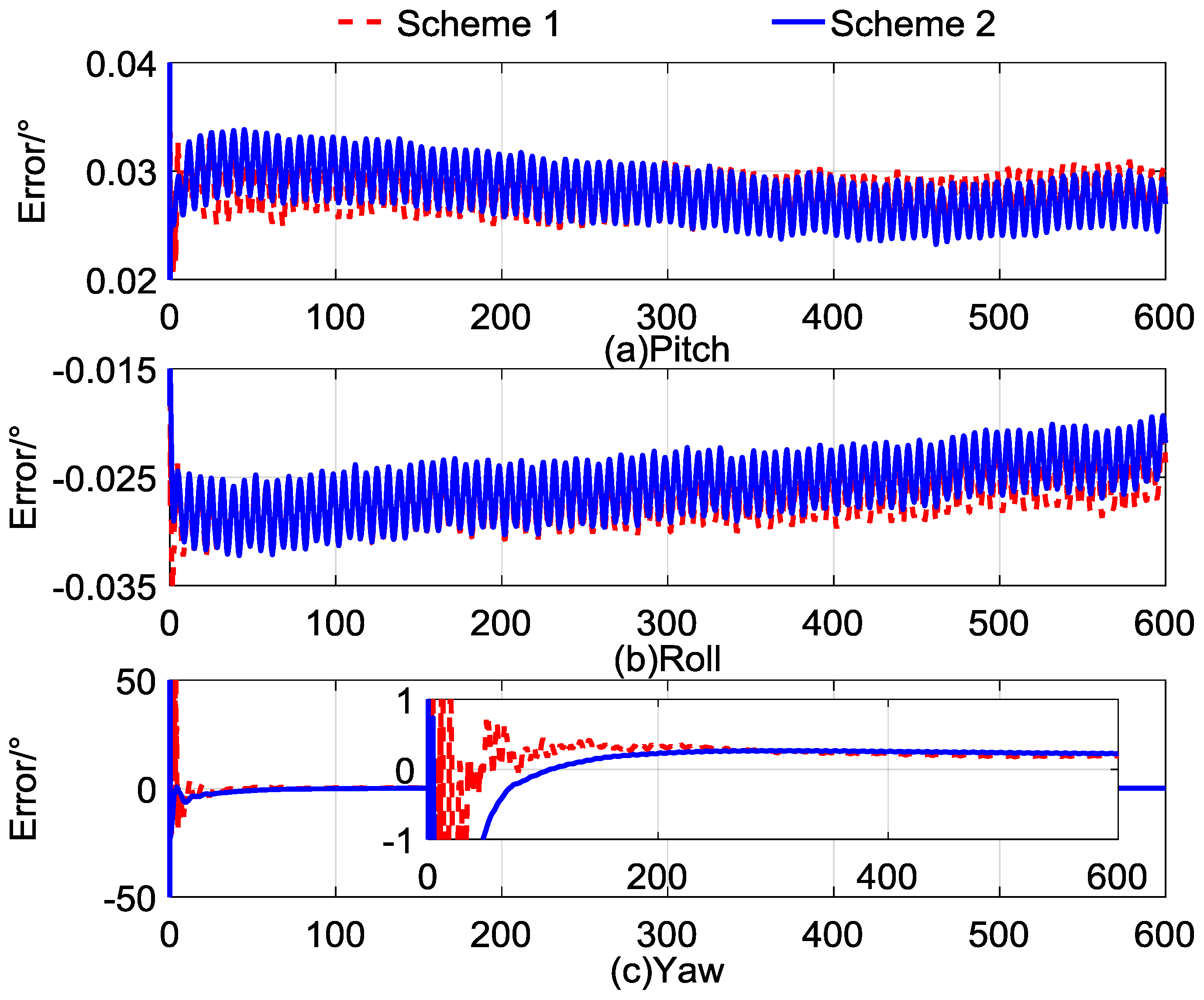
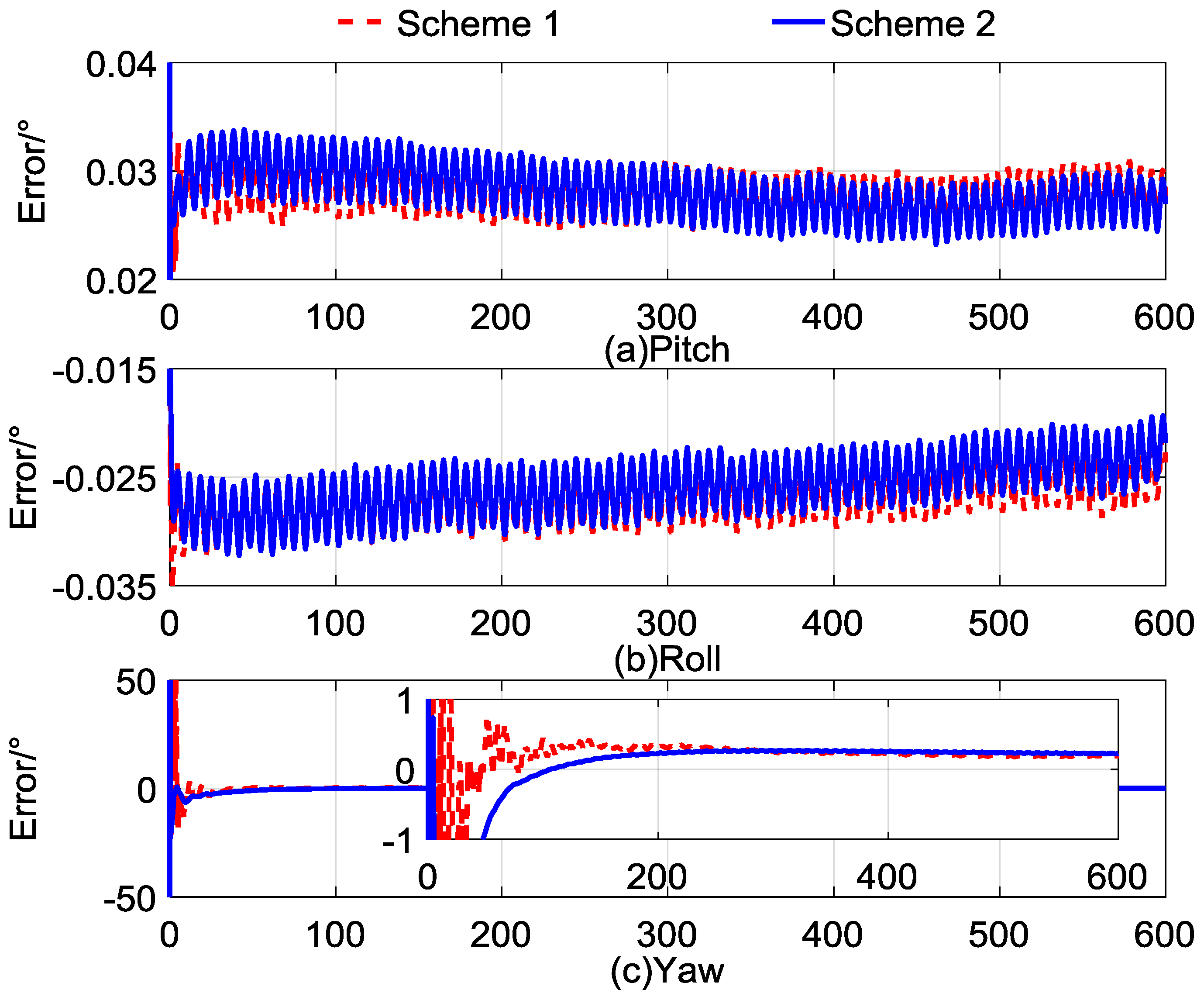
For clarity, we define the general quaternion self-alignment method based on Equation (7) as Scheme 1, and we define Equation (14) as Scheme 2. The alignment results are recorded continuously, and the errors of the alignment results are calculated and saved as text as well. The alignment errors are shown in
Figure 2, and the statistics of the alignment errors are listed in
Table 3. The errors of pitch, roll, and yaw are denoted as
Figure 2a–c, respectively, and in each subplot the red dashed line indicates the results of Scheme 1 and the solid blue line indicates the results of Scheme 2. In
Table 3, the mean and standard deviation of the alignment errors have been listed every 100 s during the whole alignment time.
The curves in
Figure 2a,b indicate that the two schemes have similar horizontal alignment errors and the same convergence rate, and reached a steady value in the former 100 s. From the statistical results in
Table 3, the pitch error was under 0.03° and the roll error was within −0.03° in the two schemes. Additionally, the standard deviation was around 0.002°, which indicates that the stability of the horizontal alignment results of the two methods was equivalent. However, the yaw error in
Figure 2c shows that the noise property of Scheme 1 was obvious, while the sound characteristic of Scheme 2 was stable. The standard deviation of yaw errors of Scheme 2 shows that the value was around 0.005° after 300 s. In the contrast, the standard deviation of the yaw of Scheme 1 in
Table 3 did not reach the stable value during the whole alignment. That is, the convergence property of Scheme 2 was better than that of Scheme 1.
Notice that in
Table 3, although the stability of Scheme 2 was improved, the constant bias of the accelerometer was accumulating during the integral operation. It can be seen that this error contaminates the final results of the self-alignment, and it affects the directional deviation of Scheme 2. The defects of the above two schemes reduce the performance of general quaternion self-alignment. According to the aforementioned analysis, the two schemes were all suboptimal. To improve the performance of general quaternion self-alignment, a novel method based on Kalman filtering technology is proposed in the next section.
5. Turntable Test
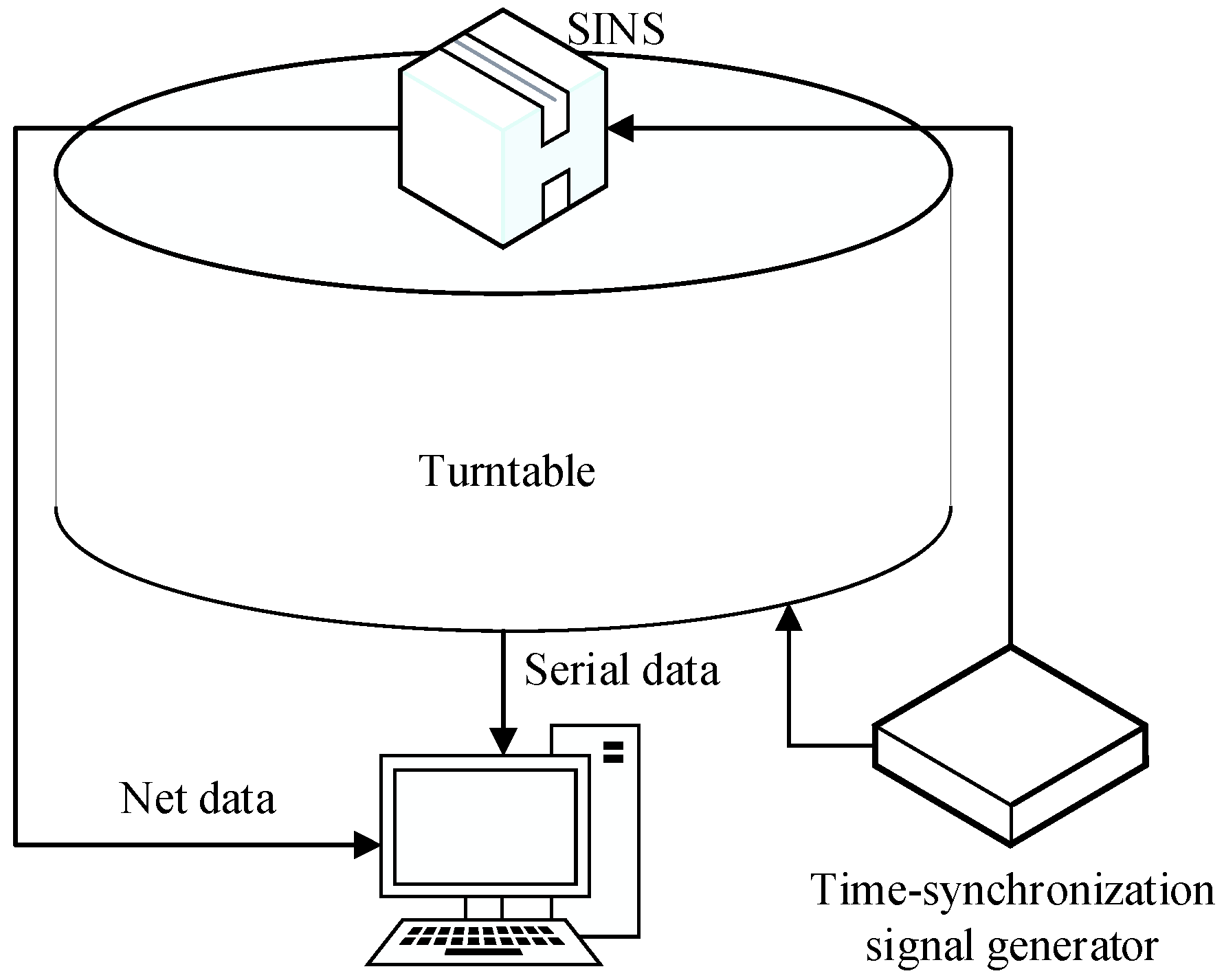
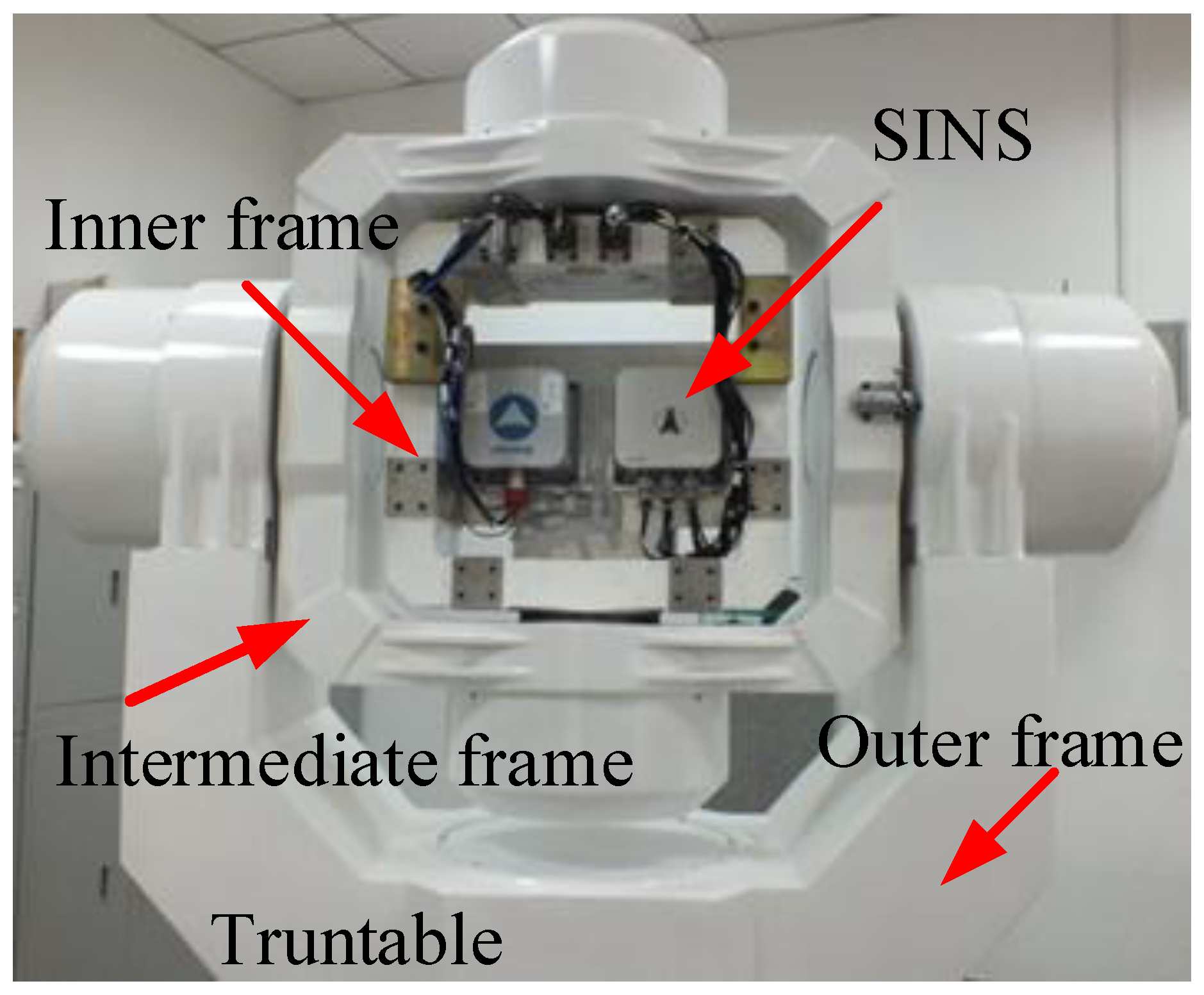
For the turntable test, the equipment was installed as shown in
Figure 6; the rate controlling accuracy of the turntable of this work was ±0.0005°/s, and the angle controlling accuracy was ±0.0001°. Additionally, the angle information could be provided via the serial communication port as a response to the external time-synchronization signal. In this test, the inner, intermediate, and outer frames were used to simulate the vehicle’s roll, pitch, and yaw, respectively. The SINS used in this test is a navigation-grade SINS, in which there are flexible gyros and quartz accelerometers, and the precision of the inertial sensors is listed in
Table 7. According to [
28], the sensor’s coupling coincident scale factors, installing error, system error, and the variables of the fiber-optic gyro related to the gravity can be calculated exactly and compensated by a calibration test. Thus, if the test is executed after the calibration test with the same startup of the SINS, the above-mentioned existence errors of SINS can be ignored.
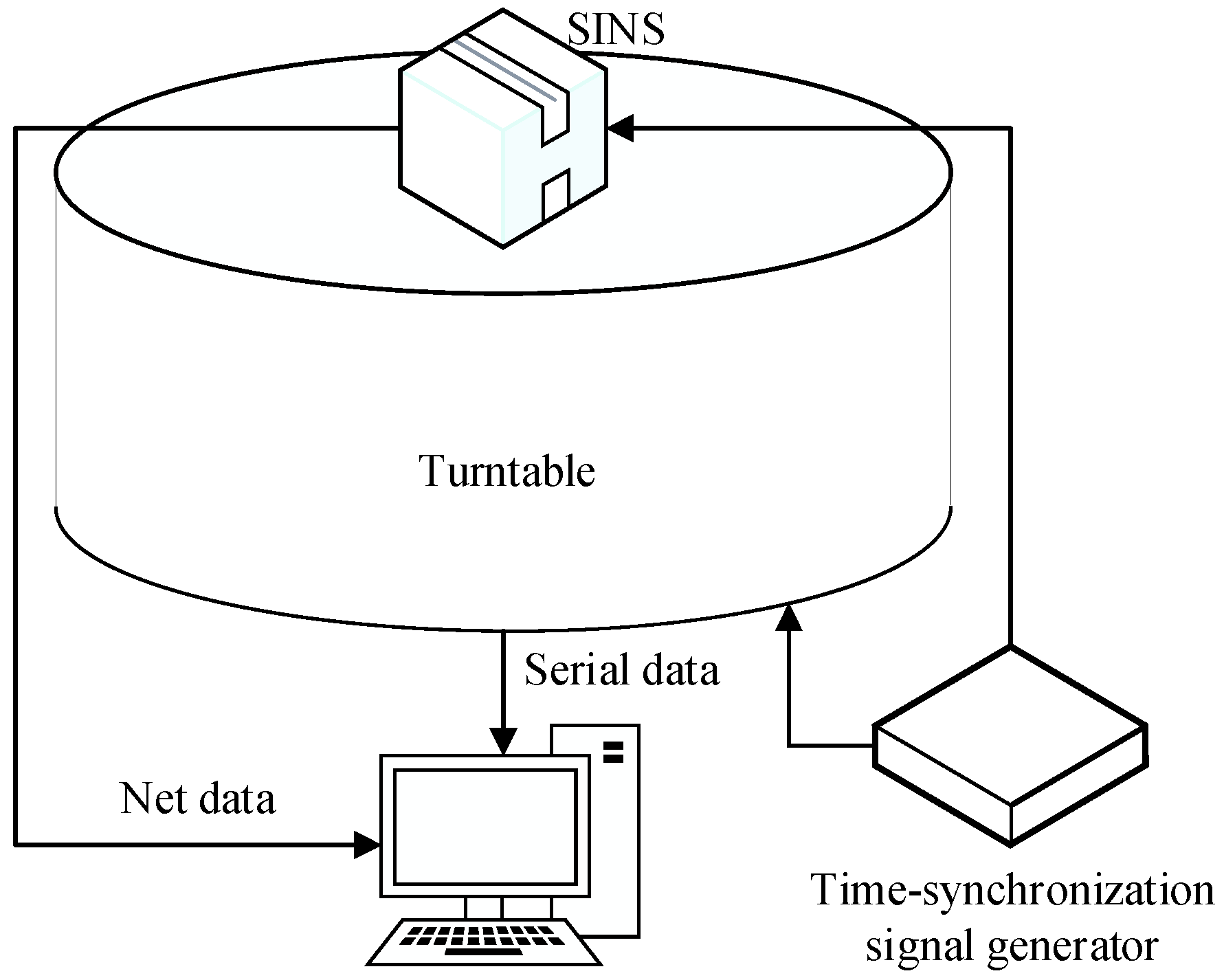
The construction of the turntable test is shown in
Figure 7. As can be seen in
Figure 7, when the time-synchronization signal was generated, the current attitude angle data of the turntable was sent to the navigation computer via the serial port. Meanwhile, the current IMU outputs were collected, and the alignment results were acquired by the embedded algorithm. All effective data was stored by the navigation computer at 200 Hz, which is the frequency of the trigger signal for the turntable and the update frequency of the IMU outputs. Meanwhile, the alignment solution was carried out and saved at every sampling interval.
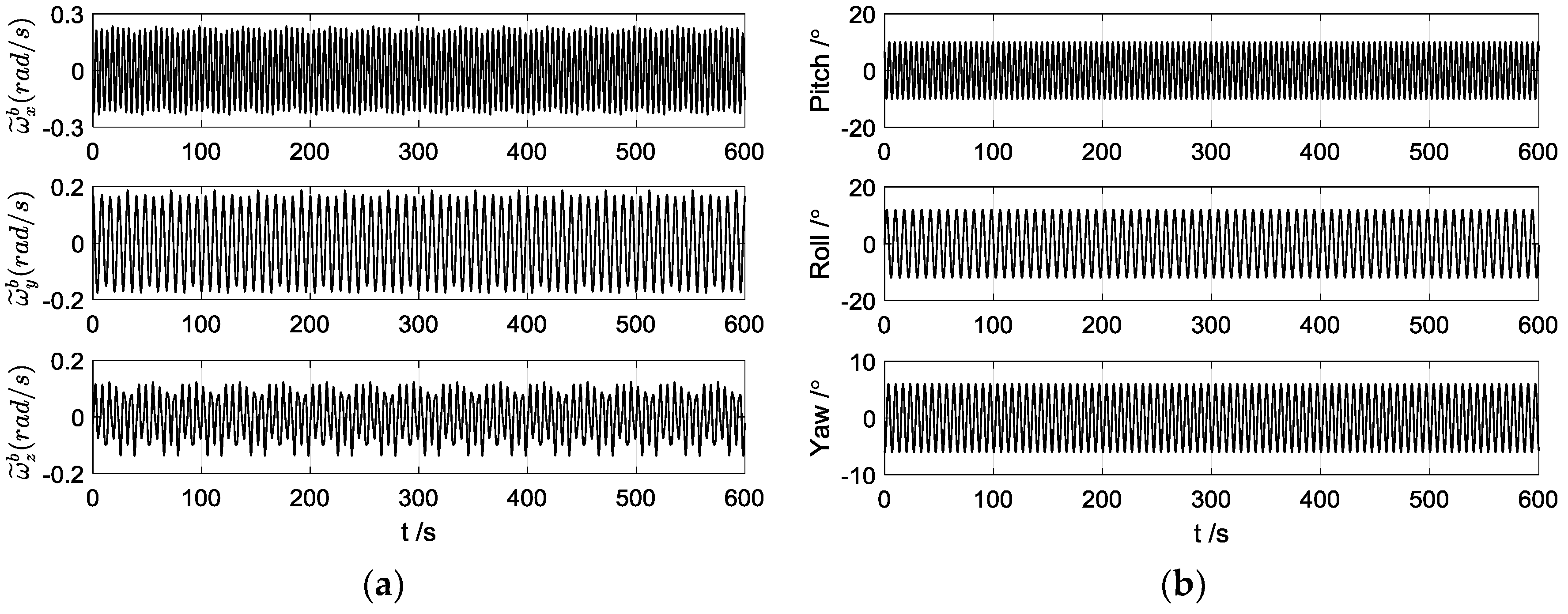
The swaying parameters of the turntable were still set as in
Table 1, and the angular rates and the actual attitude angles are shown in
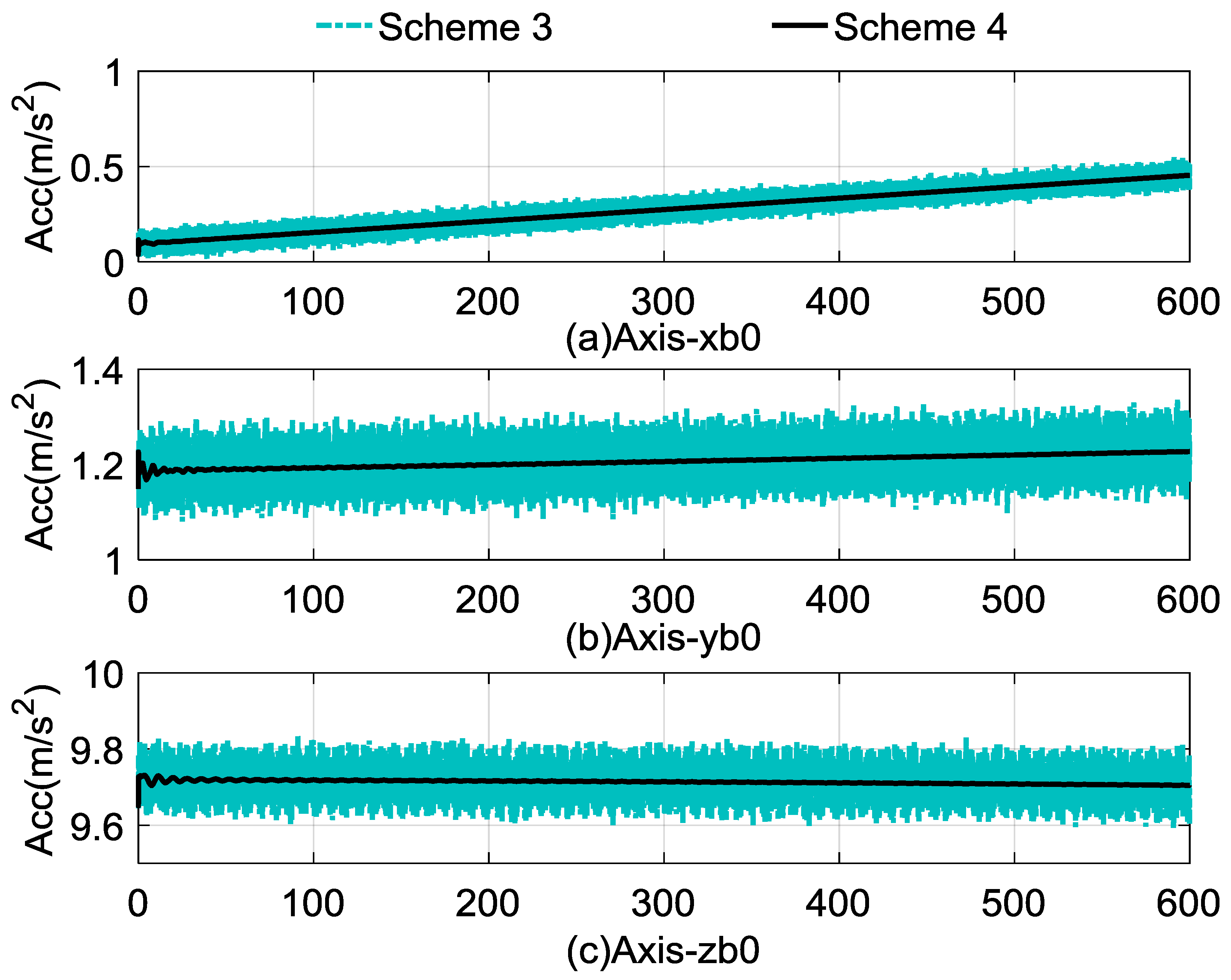
Figure 8. The calculated and reconstructed gravitational apparent motion of the turntable tests are shown in
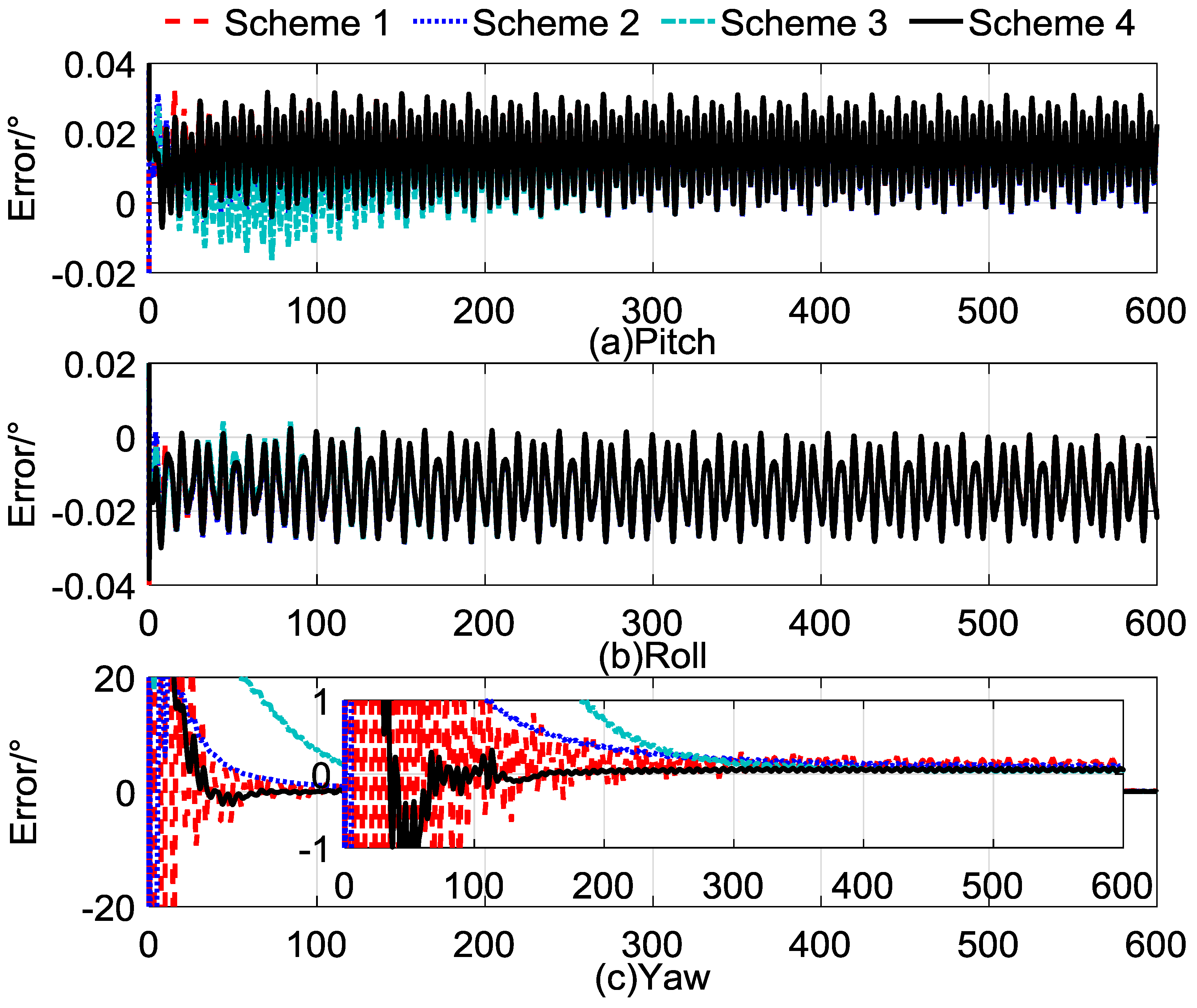
Figure 9, and the alignment errors are depicted in
Figure 10.
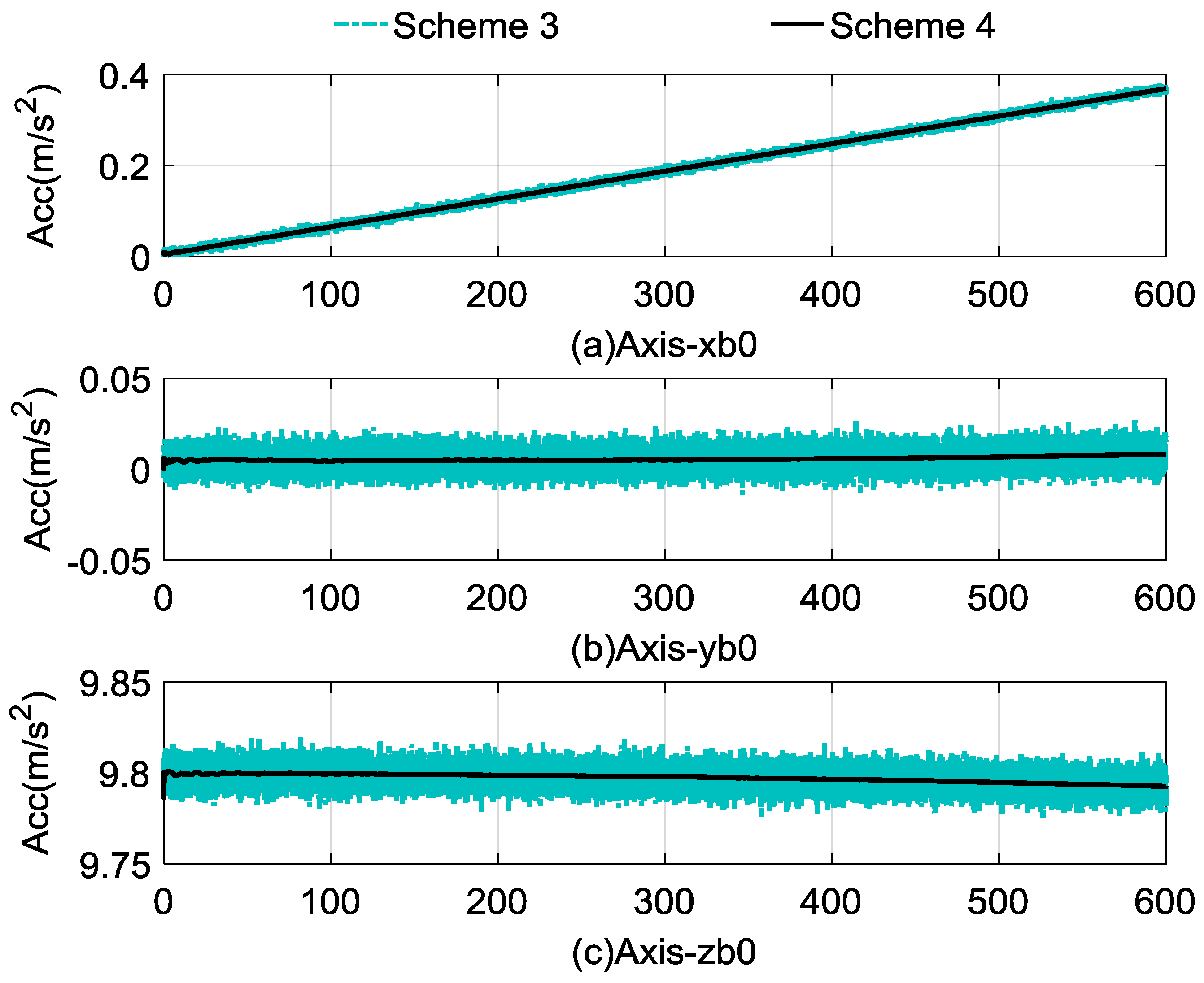
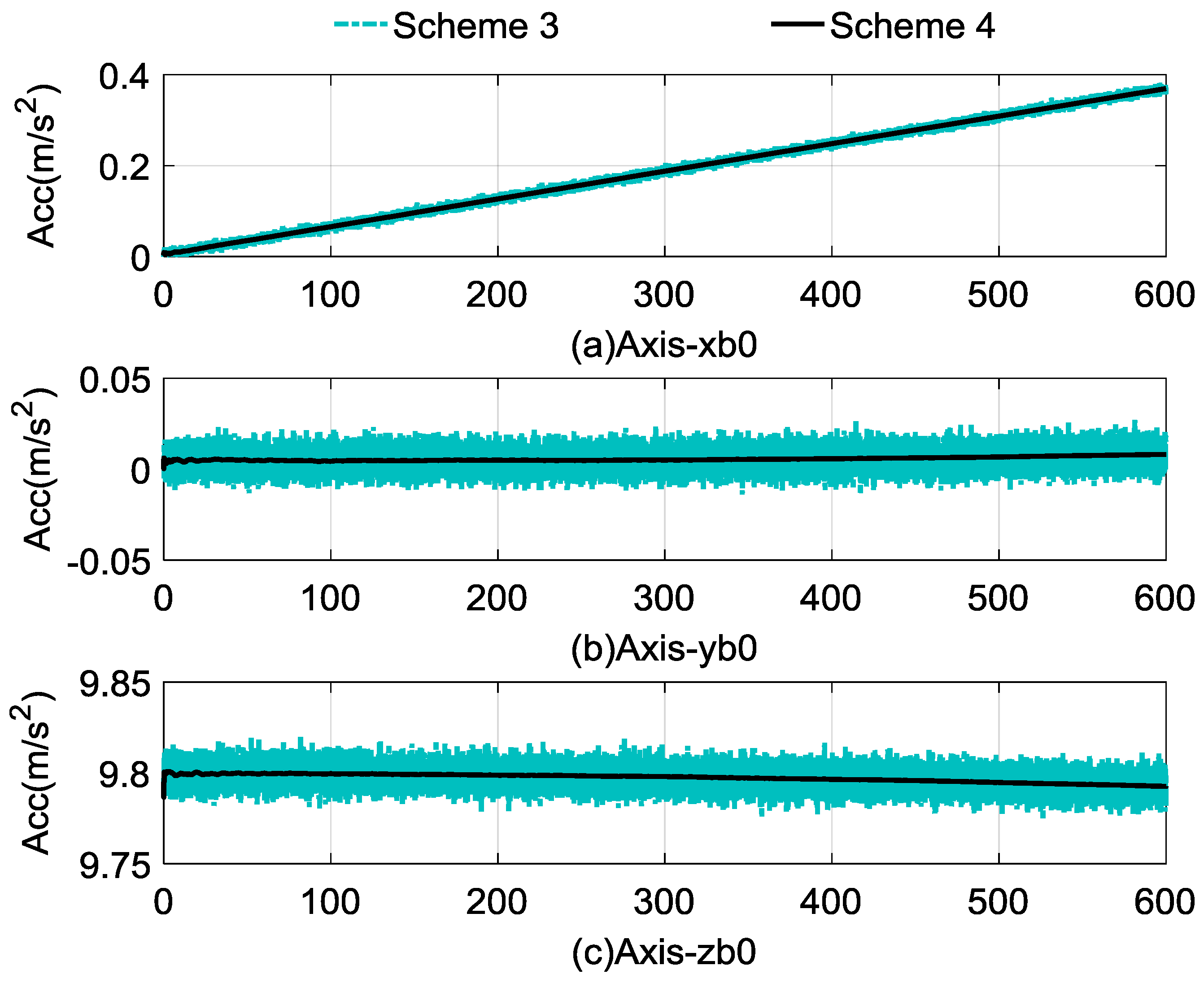
In
Figure 9, the cyan dashed dotted line represents the observation vectors of Scheme 3 and the black line represents the reconstructed observation vectors, and
Figure 9a–c denote the apparent gravitation of the
x-axis,
y-axis, and
z-axis, respectively. It is obvious that the computed measured observation vector was slowly changing along with the alignment process, and this is coincident with the above analysis. Due to this characteristic of the observation vector, the reconstructed observation vector was estimated by the RLS method. It can be found that the random noises in the observation vector were eliminated effectively, which will be helpful to speed up the alignment process.
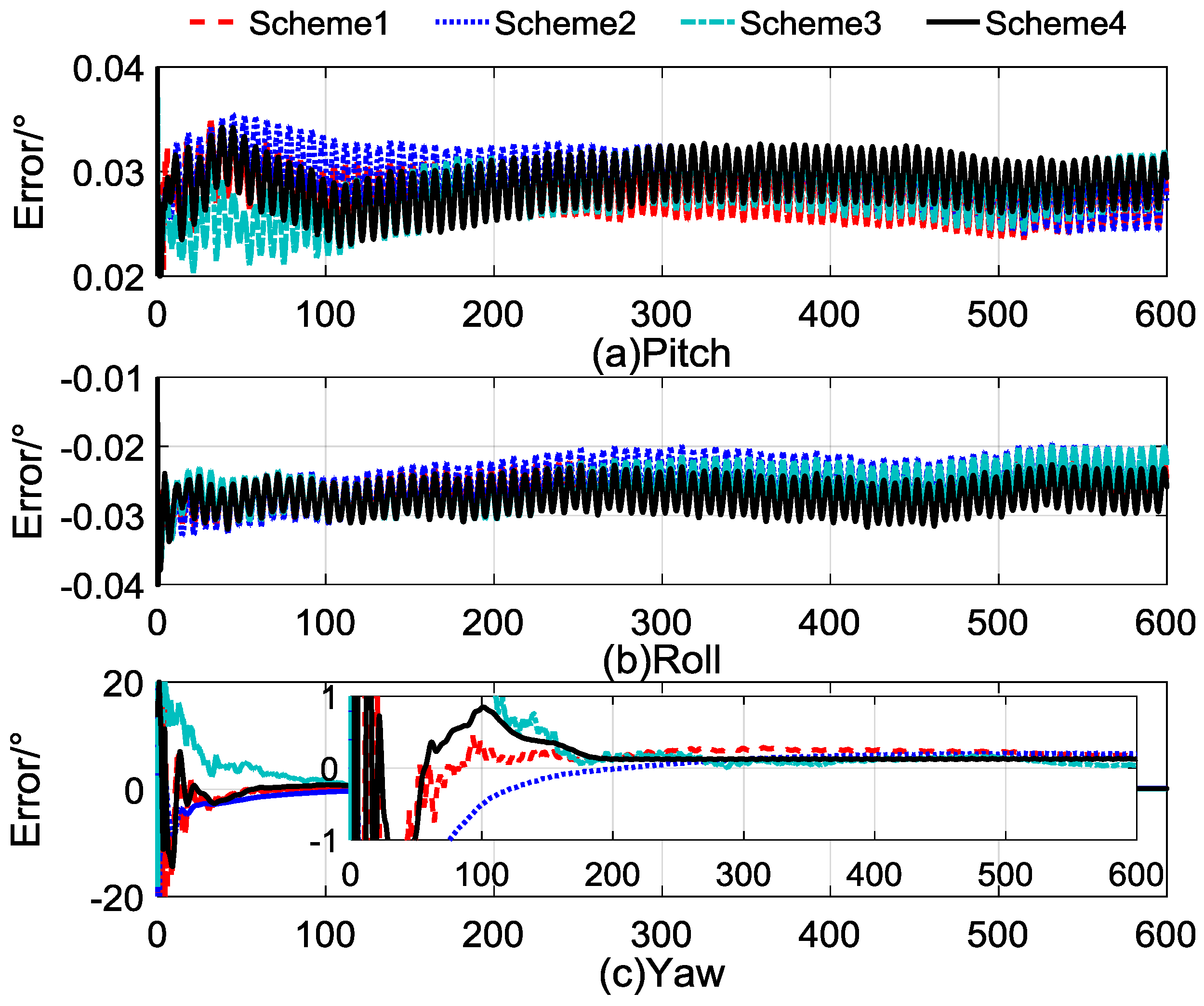
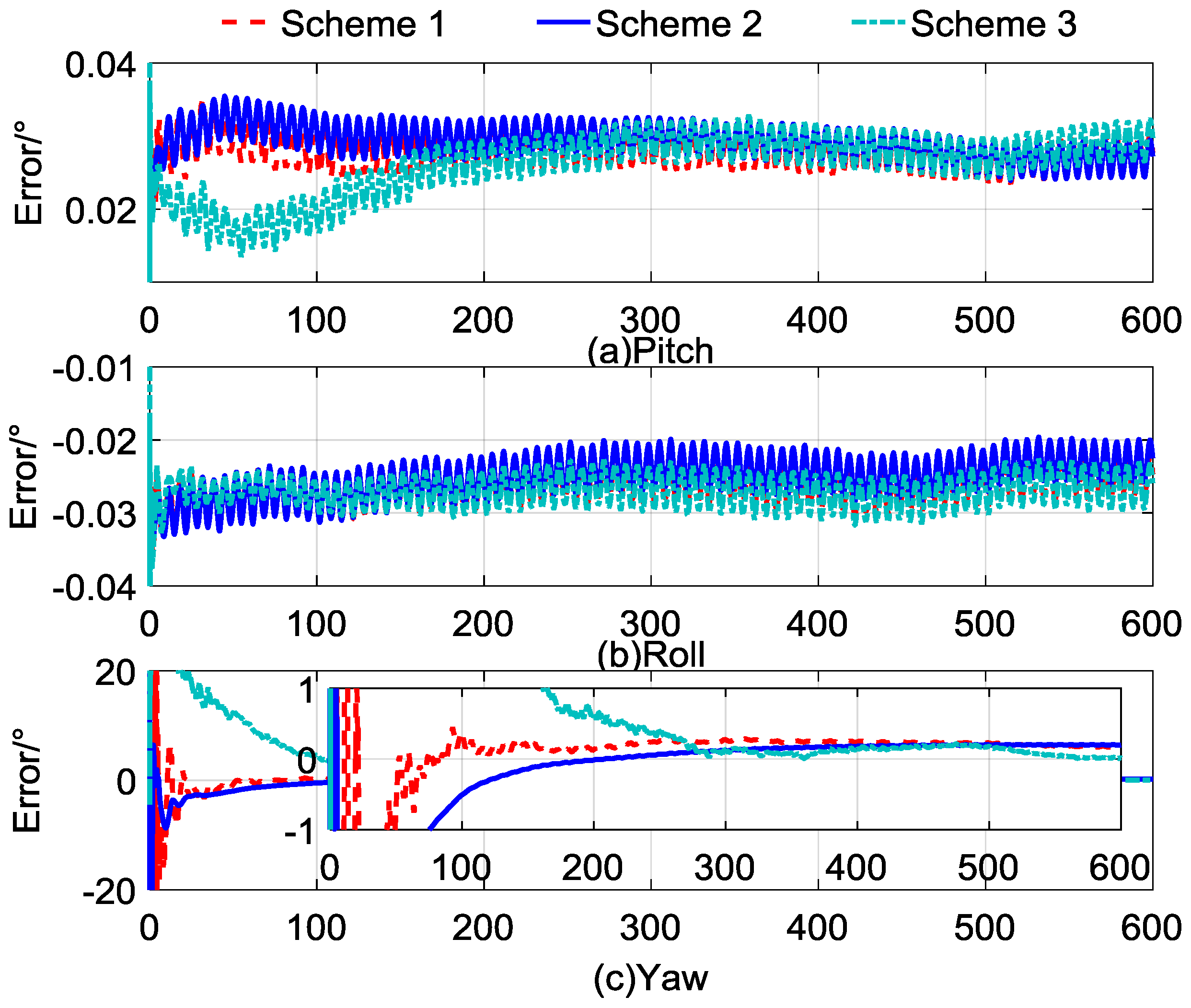
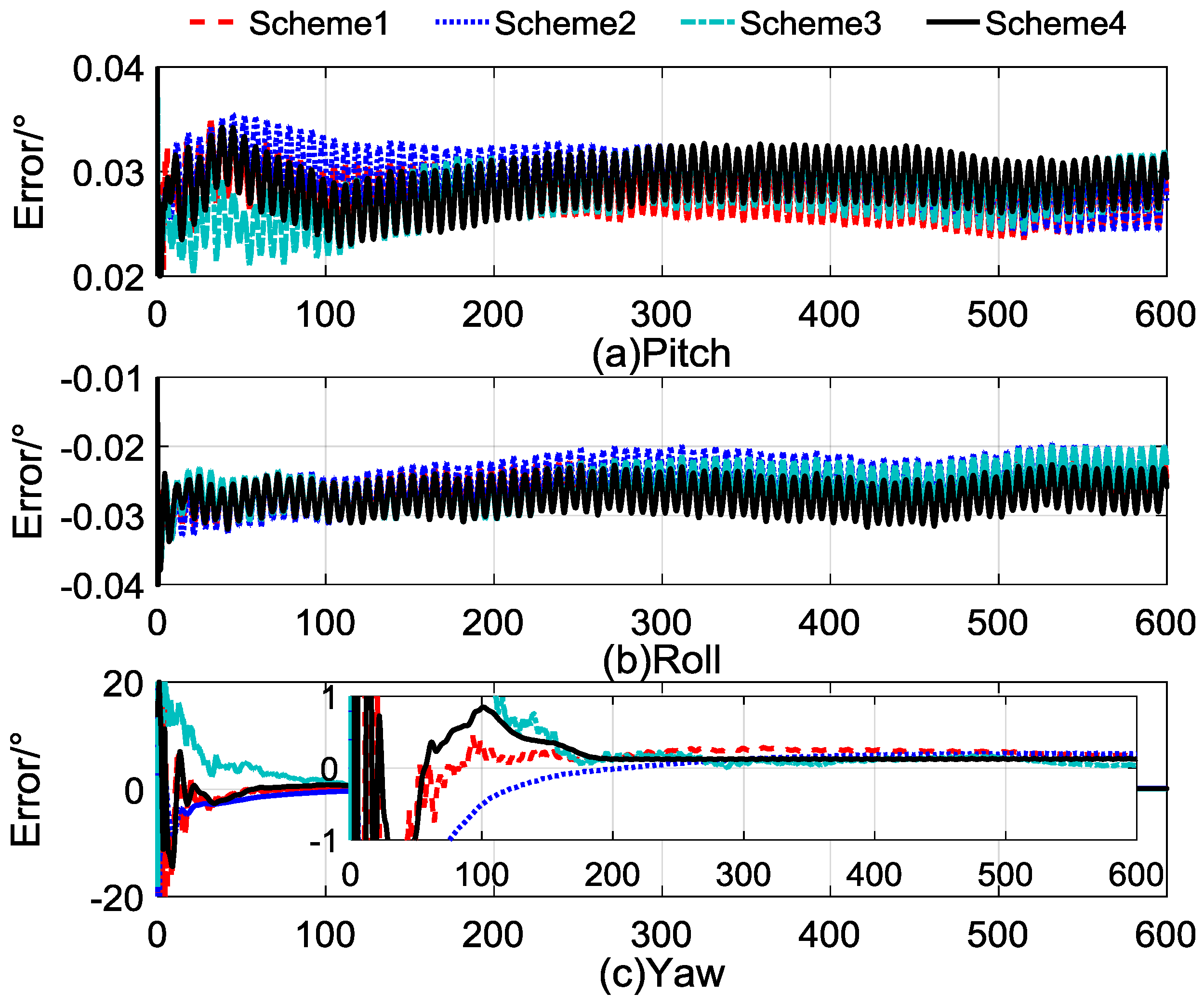
The results of the turntable tests are shown in
Figure 10a–c, indicating the errors of the pitch, roll, and yaw, respectively. Due to the swaying motion of the turntable, the alignment results were oscillating with small amplitude. In
Figure 10a,b, the error of the pitch and the roll of the four schemes converge rapidly, which is coincident with the results of the simulation test in
Section 4.3. The error of the yaw in
Figure 10c shows that Scheme 4 had a better performance than the other three schemes in terms of the convergence rate and alignment accuracy, and the stability of the alignment results of Scheme 4 was better than that of the others.
Table 8 shows the statistics for the alignment errors of Schemes 3 and 4. It is shown that the errors of the pitch and roll of Schemes 3 and 4 were reduced to less than 0.015° in 100 s, and the standard deviation of the level angles was below 0.01° in 100 s. The error of the yaw of Scheme 3 was reduced to less than 0.1° in 400 s, and the standard deviation was reduced to less than 0.02° in 400 s. In comparison, the yaw error of Scheme 4 was reduced to less than 0.1° in 200 s and the standard deviation was reduced to less than 0.02° in 200 s. These features validate the correctness of the aforementioned analysis and implemented algorithms, and they showed the sound performance of Scheme 4 in practice.
6. Conclusions
This paper studied the general quaternion self-alignment method based on the q-method principle, and an improved algorithm based on the velocity apparent motion was designed. However, the analysis and simulation indicated that: (1) in the general quaternion self-alignment method, the alignment accuracy and convergence rate are easily affected by the random noise of the inertial sensors; and (2) although the random noises are eliminated effectively by the improved algorithm, using the apparent velocity motion, the alignment result drifts because of the cumulative effect of the constant drift of the inertial sensors.
Based on general quaternion self-alignment, an improved method adopting the optimal estimation theory was investigated, in which a quaternion pseudo-measurement model with the state-dependent noises was established. A Kalman filter with adaptive filter characteristics was studied, and parameter recognition and observation vector reconstruction technology were adopted in the proposed method. Simulations and turntable tests indicated that the alignment accuracy and convergence rate of the yaw were improved. The algorithms proposed in this paper could be useful in many applications which require aligning SINS on the swaying base, such as when mooring ships. In future works, we will further test the algorithms on moving vehicles and try to handle them with large-motion maneuvers.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}