
A Study on the Influence of Speed on Road Roughness Sensing: The SmartRoadSense Case †


 ,
,  ,
,
Abstract
:1. Introduction
2. A Study on the Vertical Acceleration Sensed in the Car Cabin
2.1. Road Surface Model
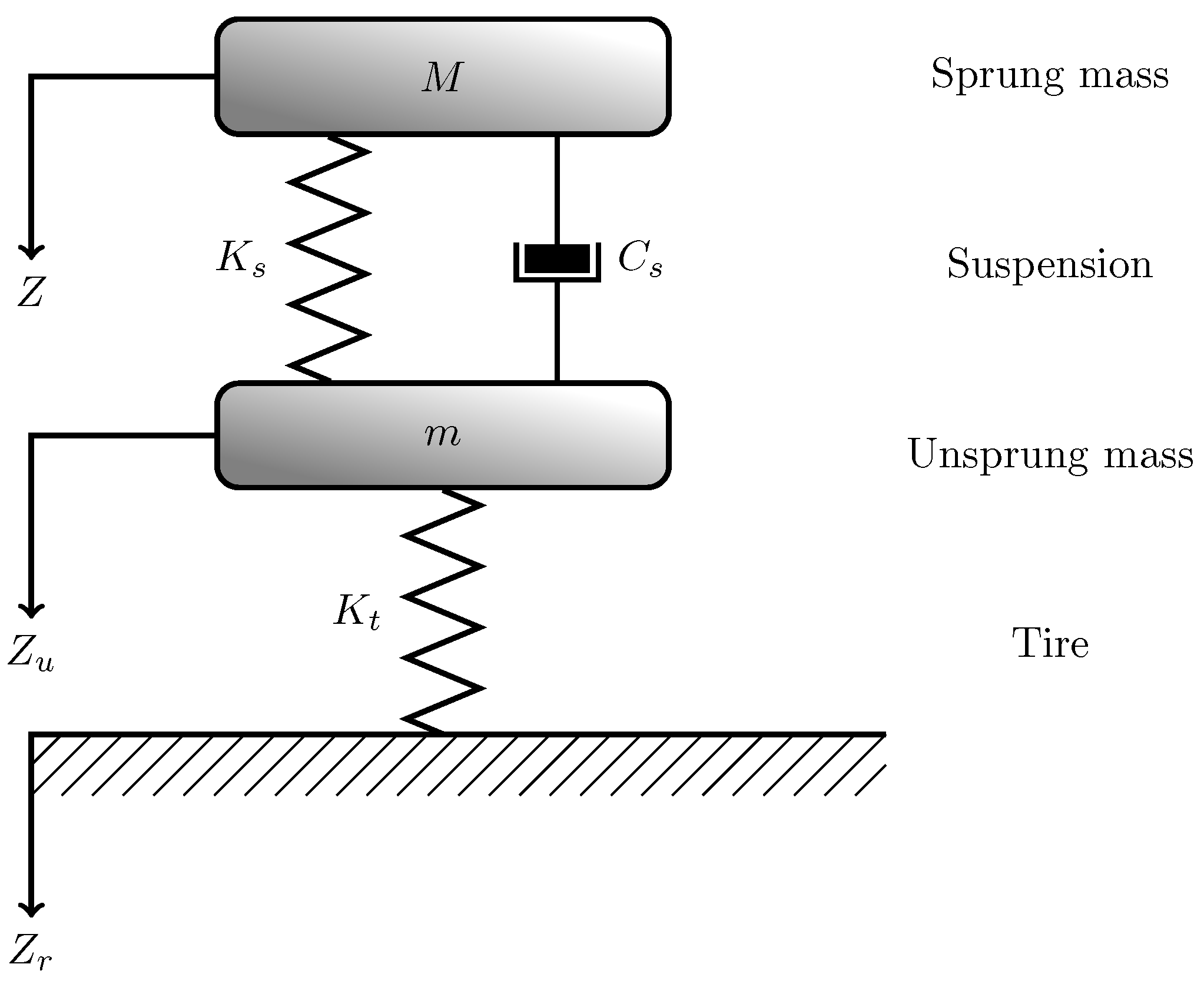
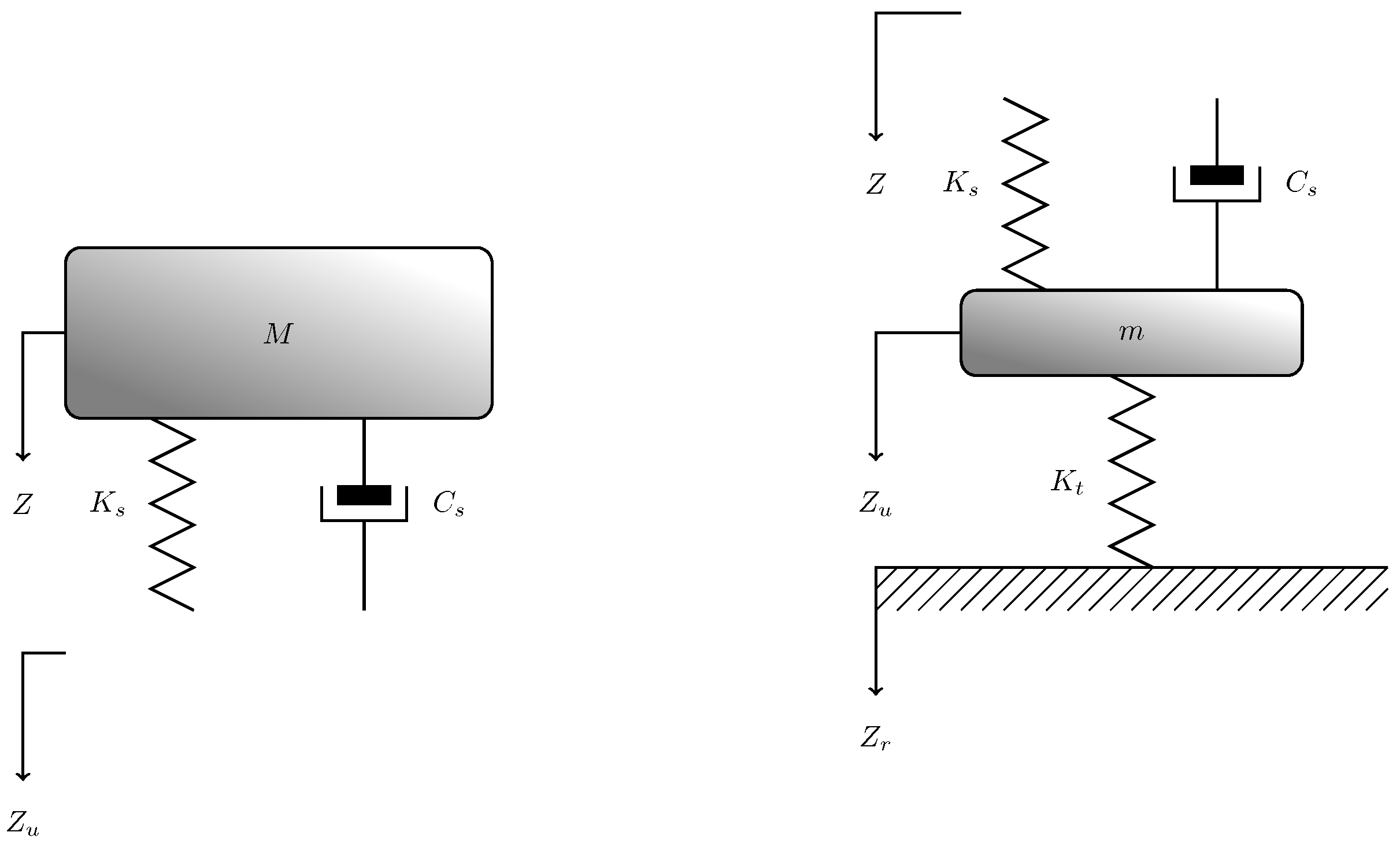
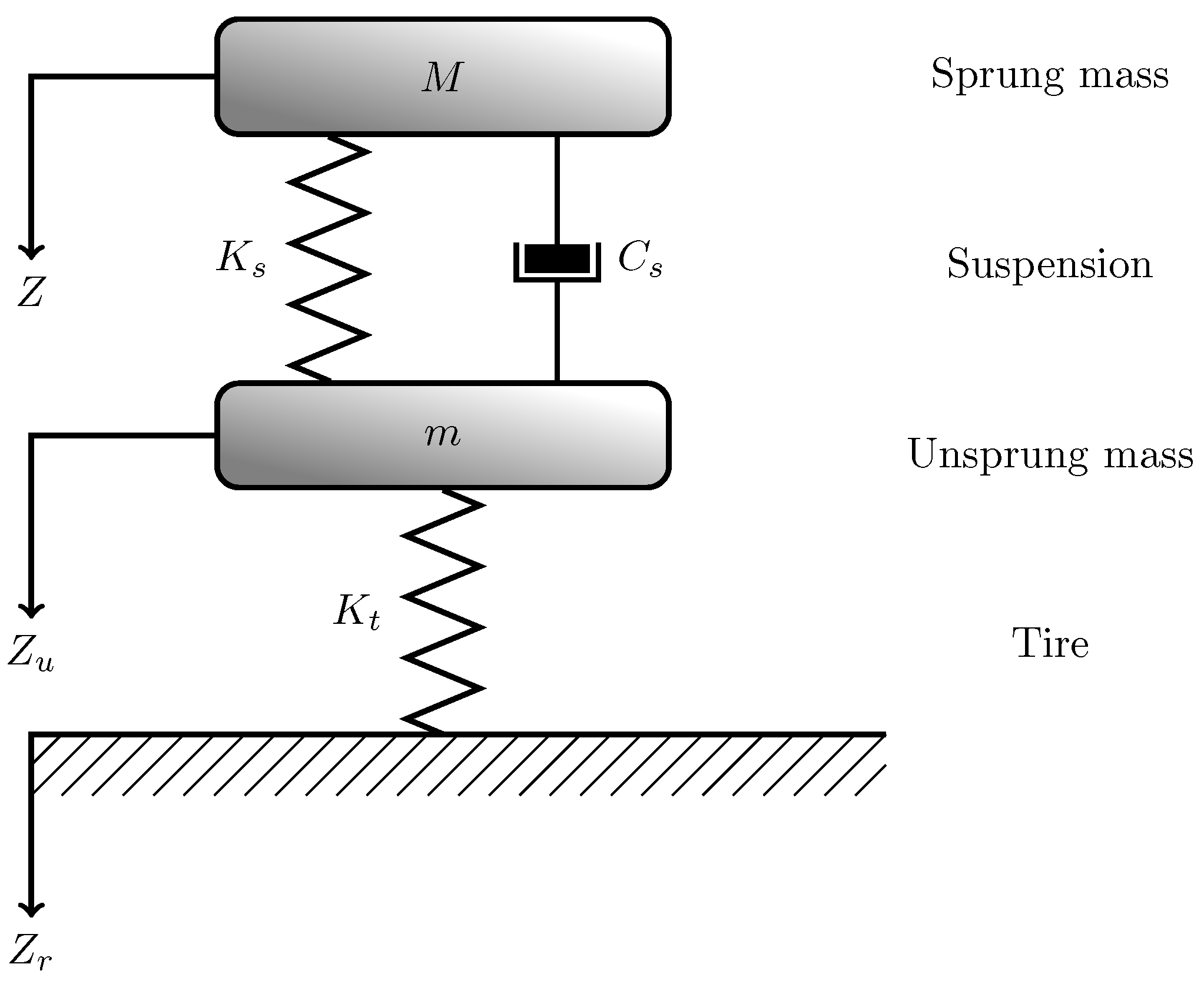
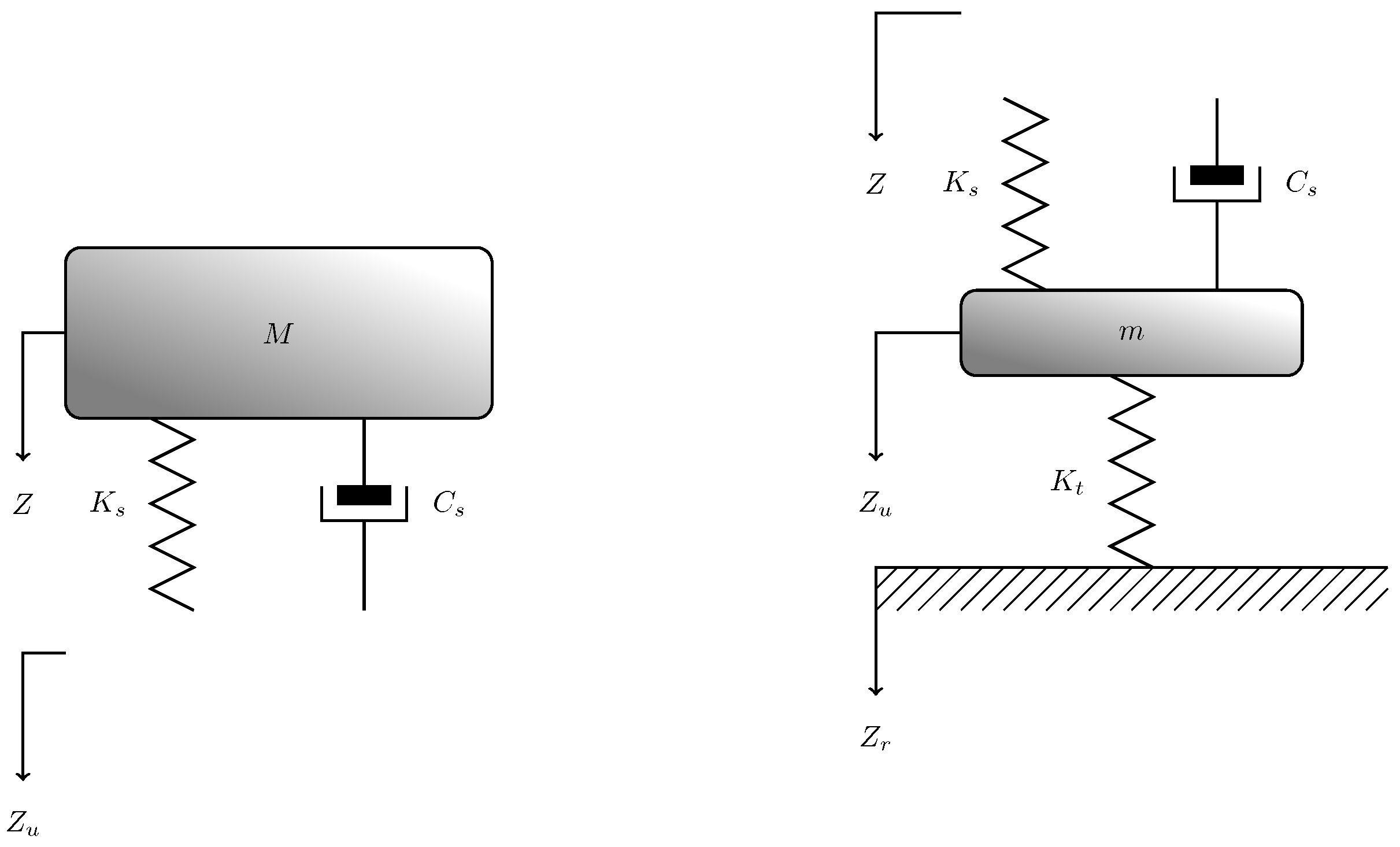
2.2. Quarter-Car Model of Suspensions
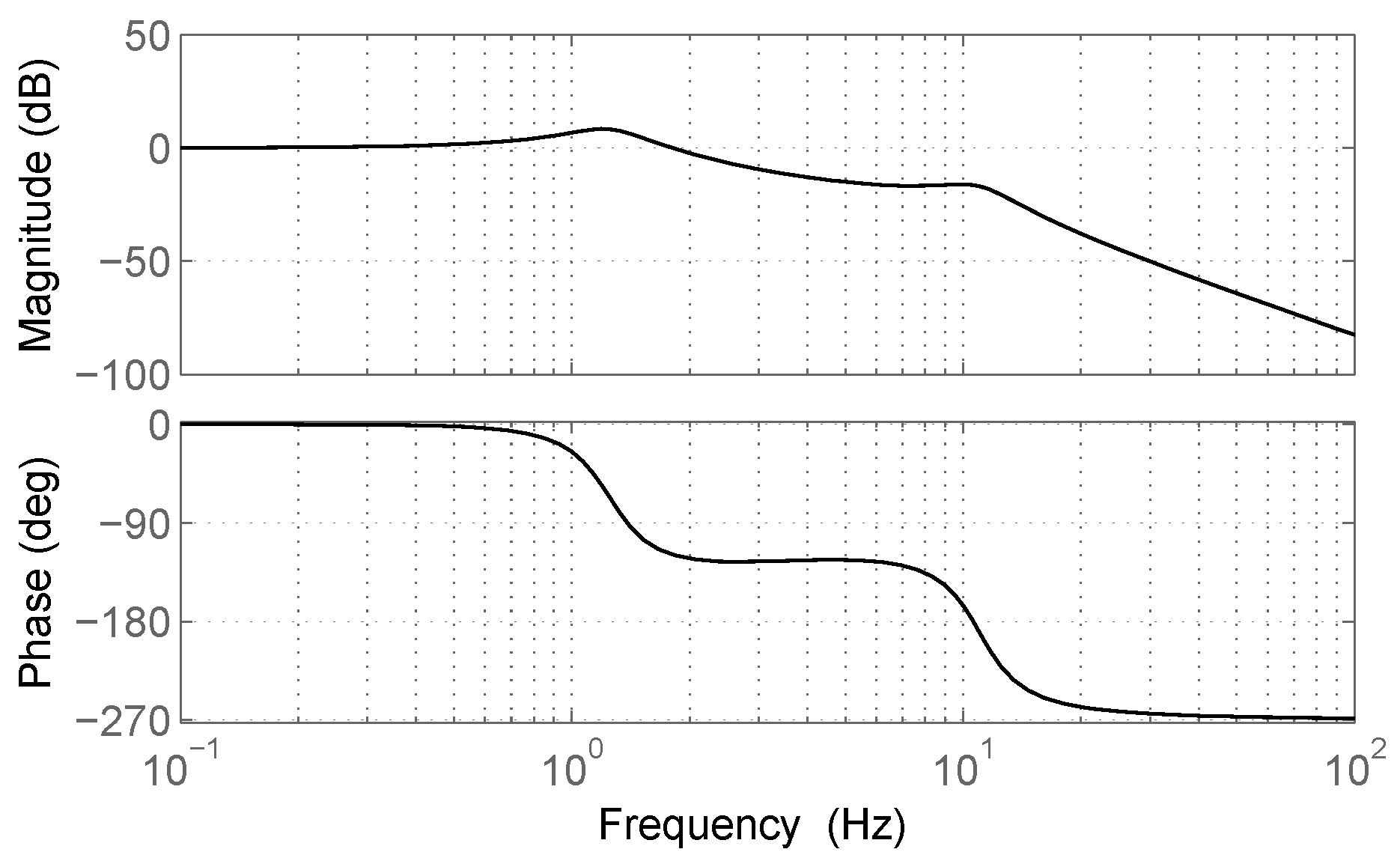
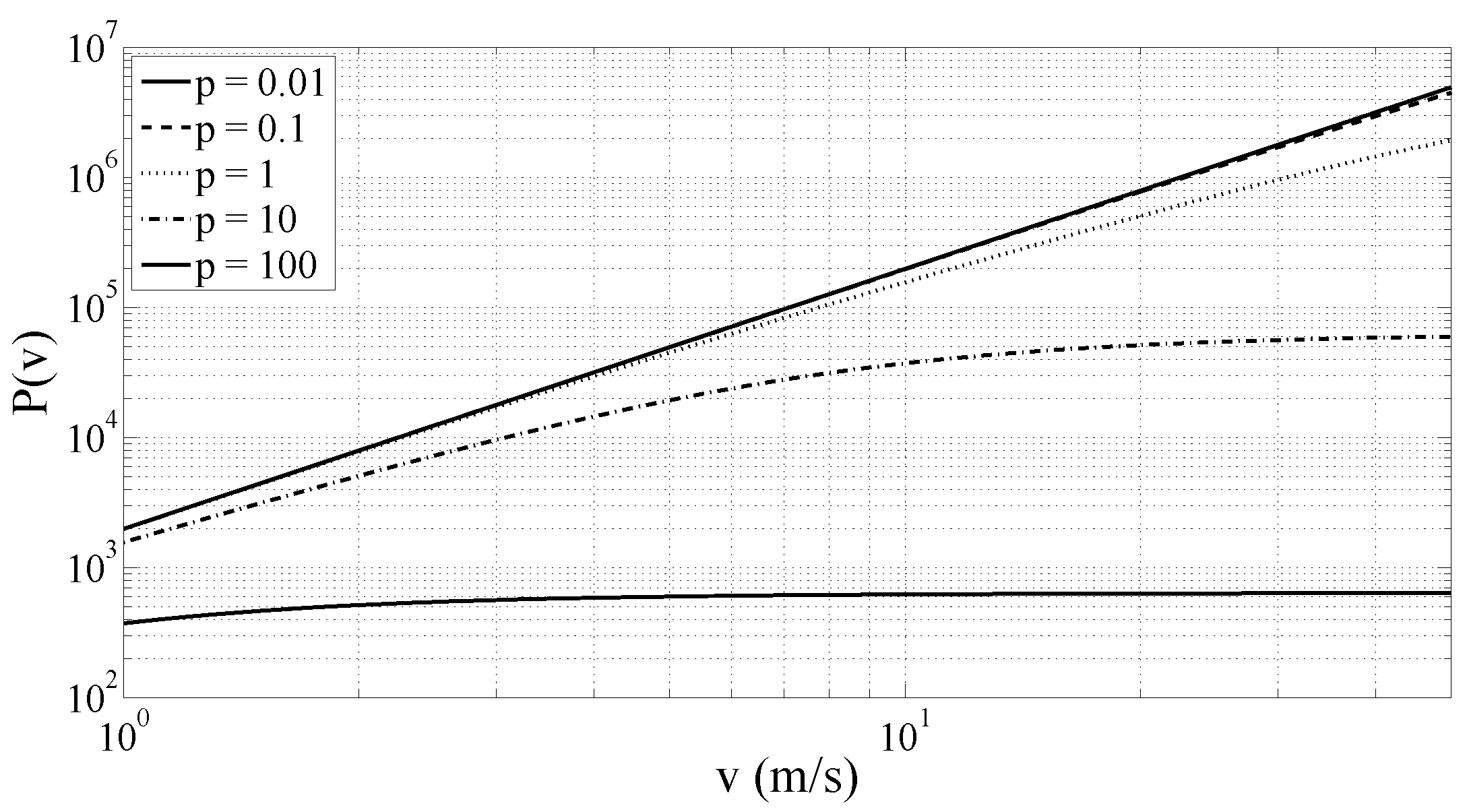
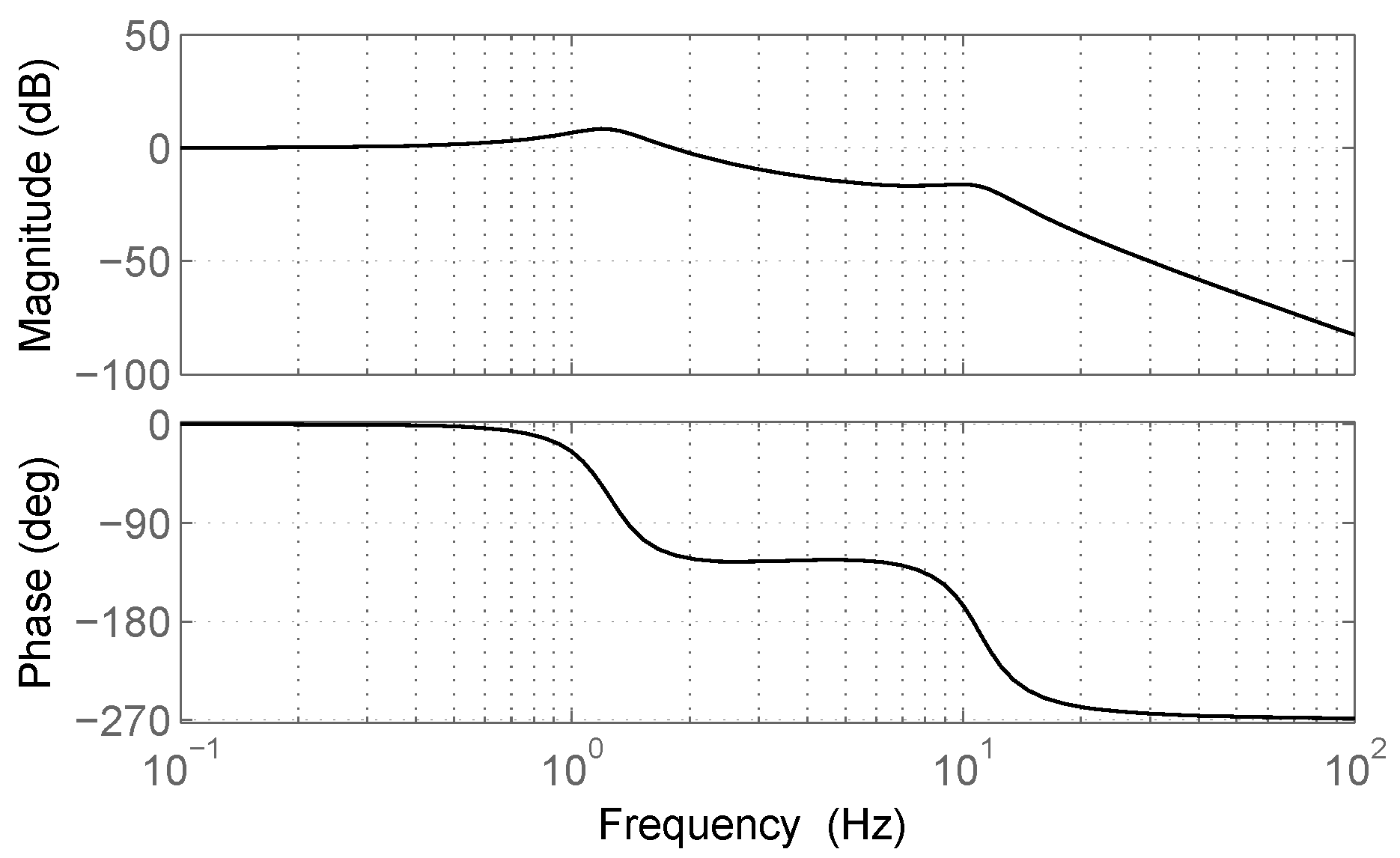
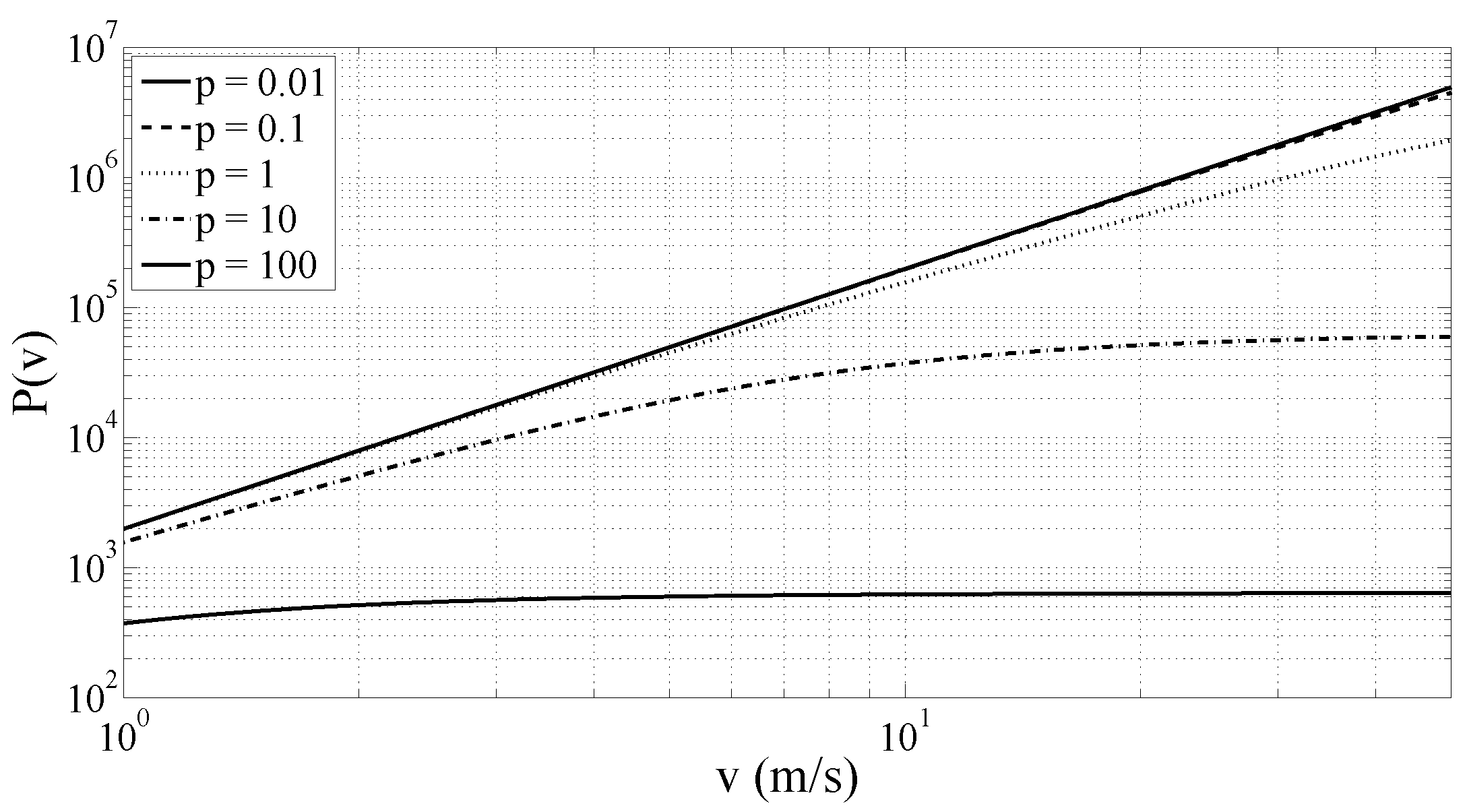
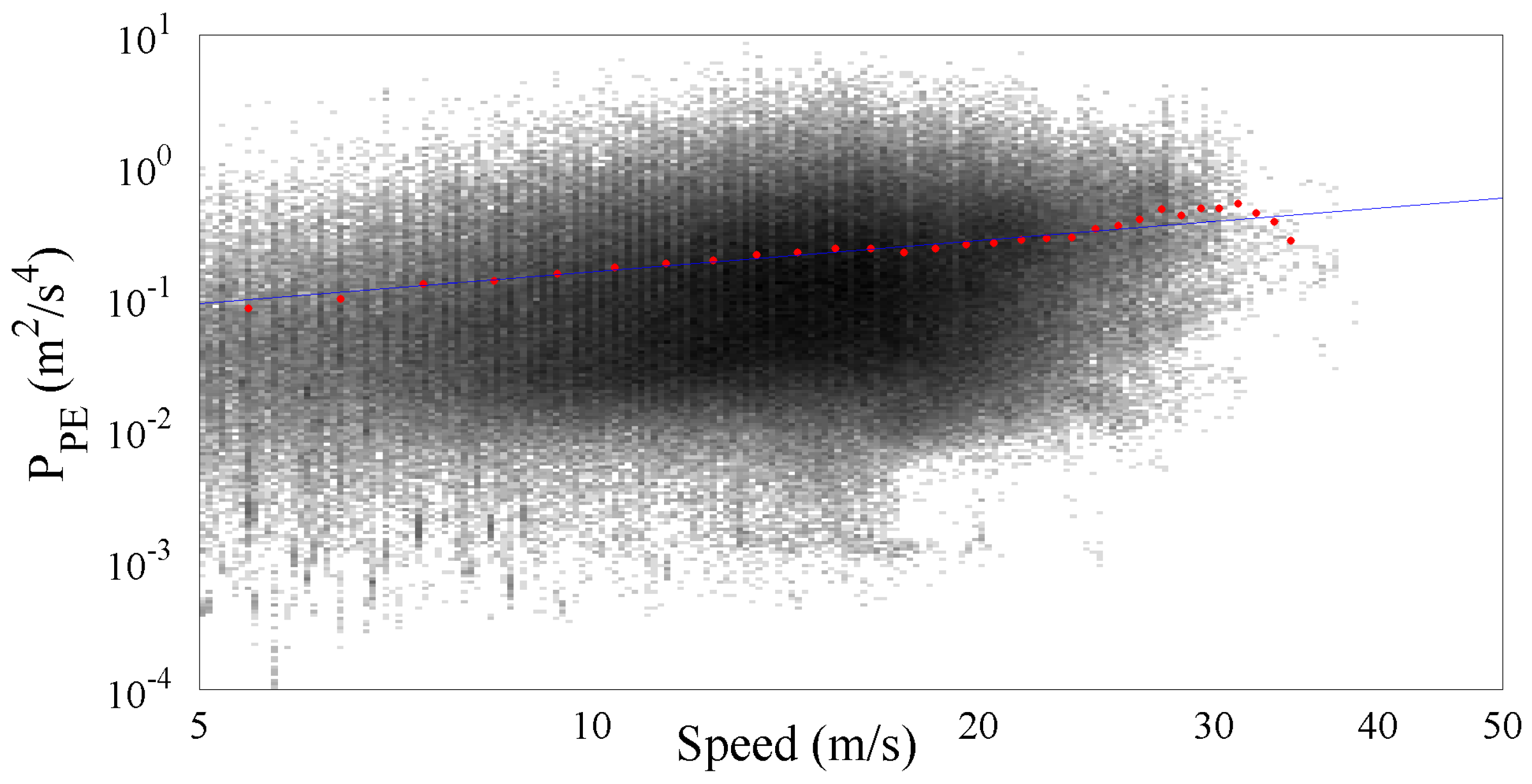
2.3. The Power of Vertical Acceleration
3. System Architecture
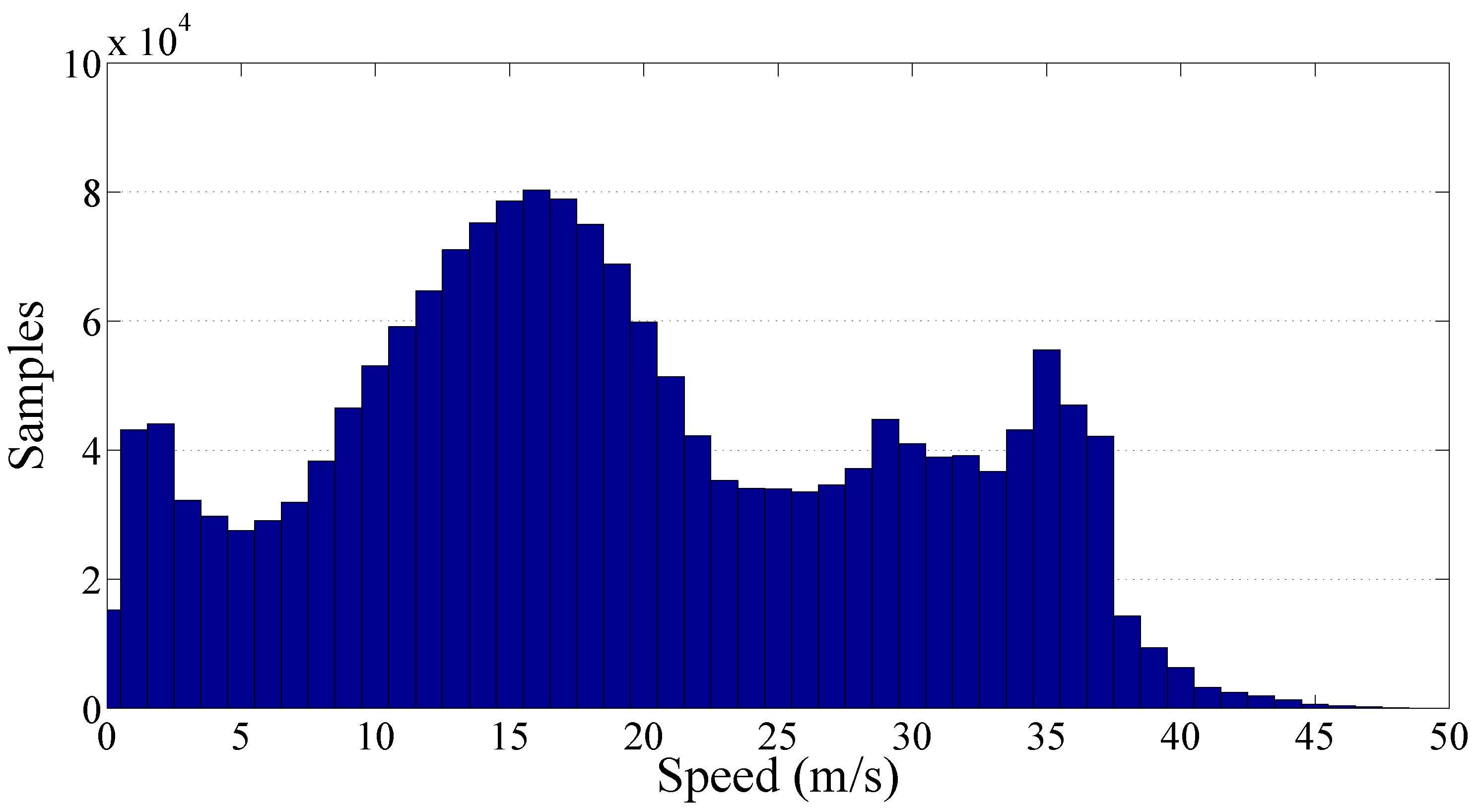
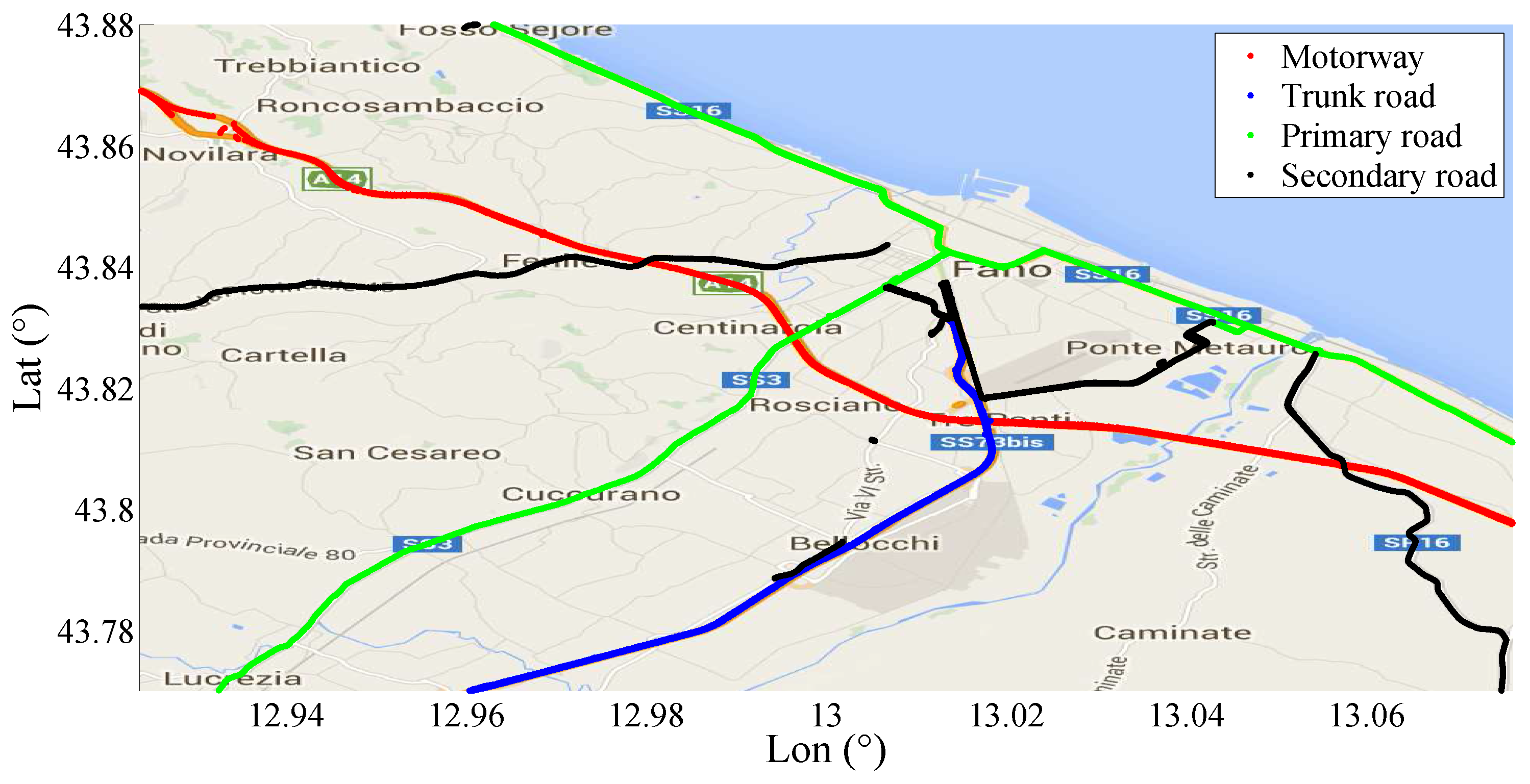
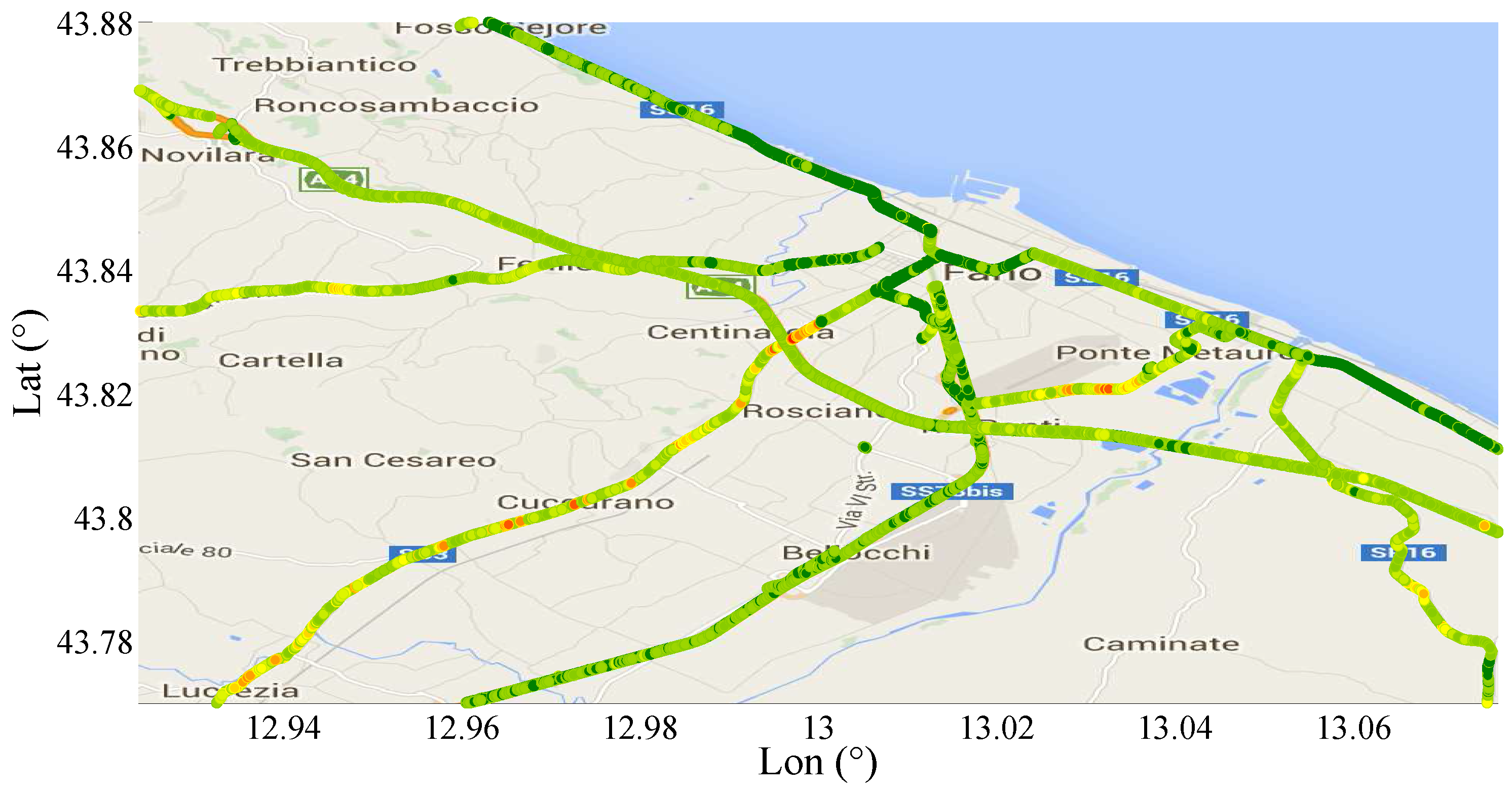
4. Experimental Results
5. Improving Data Aggregation
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Society of Automotive Engineers; Vehicle Dynamics Committee. Ride and Vibration Data Manual: SAE J6a: Report of Riding Comfort Research Committee Approved July 1946 and Last Revised by the Vehicle Dynamics Committee October 1965; SAE Information Report; Society of Automotive Engineers: Warrendale, PA, USA, 1965. [Google Scholar]
- Dahlberg, T. Optimization Criteria for Vehicles Travelling on a Randomly Profiled Road—A Survey. Veh. Syst. Dyn. 1979, 8, 239–352. [Google Scholar] [CrossRef]
- National Quality Initiative Steering Committee (U.S.). National Highway User Survey. Available online: http://ntl.bts.gov/lib/6000/6900/6952/nqinhus.pdf (accessed on 26 December 2016).
- Laurent, J.; Talbot, M.; Doucet, M. Road surface inspection using laser scanners adapted for the high precision 3D measurements of large flat surfaces. In Proceedings of the IEEE International Conference on Recent Advances in 3-D Digital Imaging and Modeling, Ottawa, ON, Canada, 12–15 May 1997; pp. 303–310.
- Ndoye, M.; Barker, A.M.; Krogmeier, J.V.; Bullock, D.M. A recursive multiscale correlation-averaging algorithm for an automated distributed road-condition-monitoring system. IEEE Trans. Intell. Transp. Syst. 2011, 12, 795–808. [Google Scholar] [CrossRef]
- González, A.; O’Brien, E.J.; Li, Y.Y.; Cashell, K. The use of vehicle acceleration measurements to estimate road roughness. Veh. Syst. Dyn. 2008, 46, 483–499. [Google Scholar] [CrossRef]
- Eriksson, J.; Girod, L.; Hull, B.; Newton, R.; Madden, S.; Balakrishnan, H. The pothole patrol: Using a mobile sensor network for road surface monitoring. In Proceedings of the 6th ACM International Conference on Mobile Systems, Applications, and Services, Breckenridge, CO, USA, 10–13 June 2008; pp. 29–39.
- Mohan, P.; Padmanabhan, V.N.; Ramjee, R. Nericell: Rich monitoring of road and traffic conditions using mobile smartphones. In Proceedings of the 6th ACM Conference on Embedded Network Sensor Systems, Raleigh, NC, USA, 5–7 November 2008; pp. 323–336.
- Mednis, A.; Strazdins, G.; Zviedris, R.; Kanonirs, G.; Selavo, L. Real time pothole detection using android smartphones with accelerometers. In Proceedings of the 2011 International Conference on Distributed Computing in Sensor Systems and Workshops (DCOSS), Barcelona, Spain, 27–29 June 2011; pp. 1–6.
- Strazdins, G.; Mednis, A.; Kanonirs, G.; Zviedris, R.; Selavo, L. Towards vehicular sensor networks with android smartphones for road surface monitoring. In Proceedings of the 2nd International Workshop on Networks of Cooperating Objects, Chicago, IL, USA, 11–12 April 2011.
- Bhoraskar, R.; Vankadhara, N.; Raman, B.; Kulkarni, P. Wolverine: Traffic and road condition estimation using smartphone sensors. In Proceedings of the COMSNETS ’12, Bangalore, India, 3–7 January 2012; pp. 1–6.
- Seraj, F.; Zwaag, B.J.; Dilo, A.; Luarasi, T.; Havinga, P. RoADS: A road pavement monitoring system for anomaly detection using smart phones. In Proceedings of the SenseML ’14, Nancy, France, 15 Septermber 2014; Lecture Notes in Computer Science; Springer: Berlin, Germany, 2014. [Google Scholar]
- Seraj, F.; Zhang, K.; Turkes, O.; Meratnia, N.; Havinga, P.J.M. A Smartphone Based Method to Enhance Road Pavement Anomaly Detection by Analyzing the Driver Behavior. In Proceedings of the UbiComp ’15, Osaka, Japan, 7–11 September 2015.
- Tai, Y.; Chan, C.; Hsu, J.Y. Automatic road anomaly detection using smart mobile device. In Proceedings of the Conference on Technologies and Applications of Artificial Intelligence, Hsinchu, Taiwan, 18–20 November 2010; pp. 1–8.
- Perttunen, M.; Mazhelis, O.; Cong, F.; Kauppila, M.; Leppänen, T.; Kantola, J.; Collin, J.; Pirttikangas, S.; Haverinen, J.; Ristaniemi, T.; et al. Distributed road surface condition monitoring using mobile phones. In Ubiquitous Intelligence and Computing; Springer: Berlin, Germany, 2011; pp. 64–78. [Google Scholar]
- Astarita, V.; Vaiana, R.; Iuele, T.; Maria, V.C.; Giofrè, V.P. Automated sensing system for monitoring of road surface quality by mobile devices. Proc. Soc. Behav. Sci. 2014, 111, 242–251. [Google Scholar]
- Yi, C.-W.; Chuang, Y.-T.; Nian, C.-S. Toward Crowdsourcing-Based Road Pavement Monitoring by Mobile Sensing Technologies. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1905–1917. [Google Scholar] [CrossRef]
- Mohamed, A.; Fouad, M.M.M.; Elhariri, E.; El-Bendary, N.; Zawbaa, H.M.; Tahoun, M.; Hassanien, A.E. RoadMonitor: An intelligent road surface condition monitoring system. In Proceedings of the Intelligent Systems 2014, Warsaw, Poland, 24–26 September 2014; Springer: Cham, Switzerland, 2015; pp. 377–387. [Google Scholar]
- Mukherjee, A.; Majhi, S. Characterisation of road bumps using smartphones. Eur. Transp. Res. Rev. 2016, 8, 1–12. [Google Scholar] [CrossRef]
- Yi, C.W.; Chuang, Y.T.; Nian, C.S. Toward crowdsourcing-based road pavement monitoring by mobile sensing technologies. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1905–1917. [Google Scholar] [CrossRef]
- Jang, J.; Yang, Y.; Smyth, A.W.; Cavalcanti, D.; Kumar, R. Framework of Data Acquisition and Integration for the Detection of Pavement Distress via Multiple Vehicles. J. Comput. Civ. Eng. 2016. [Google Scholar] [CrossRef]
- Chen, K.; Lu, M.; Tan, G.; Wu, J. CRSM: Crowdsourcing Based Road Surface Monitoring. In Proceedings of the HPCC EUC ’13, Zhangjiajie, China, 13–15 November 2013; pp. 2151–2158.
- Douangphachanh, V.; Oneyama, H. A study on the use of smartphones for road roughness condition estimation. J. East. Asia Soc. Transp. Stud. 2013, 10, 1551–1564. [Google Scholar]
- Douangphachanh, V.; Oneyama, H. Using Smartphones to Estimate Road Pavement Condition. In Proceedings of the International Symposium of Next Generation Infrastructure, Wollongong, Australia, 1–4 October 2013.
- Douangphachanh, V.; Oneyama, H. A study on the use of smartphones under realistic settings to estimate road roughness condition. EURASIP J. Wirel. Commun. Netw. 2014, 2014, 1–11. [Google Scholar] [CrossRef]
- Bogliolo, A.; Aldini, A.; Alessandroni, G.; Carini, A.; Delpriori, S.; Freschi, V.; Klopfenstein, L.; Lattanzi, E.; Luchetti, G.; Paolini, B.; et al. The SmartRoadSense Website. Available online: http://smartroadsense.it/ (accessed on 26 December 2016).
- Alessandroni, G.; Klopfenstein, L.; Delpriori, S.; Dromedari, M.; Luchetti, G.; Paolini, B.; Seraghiti, A.; Lattanzi, E.; Freschi, V.; Carini, A.; et al. SmartRoadSense: Collaborative Road Surface Condition Monitoring. In Proceedings of the UBICOMM 2014: The Eighth International Conference on Mobile Ubiquitous Computing, Systems, Services and Technologies, Rome, Italy, 24–28 August 2014; pp. 210–215.
- Alessandroni, G.; Carini, A.; Lattanzi, E.; Bogliolo, A. Sensing Road Roughness via Mobile Devices: A Study on Speed Influence. In Proceedings of the ISPA 2015: The 9th International Symposium on Image and Signal Processing and Analysis, Zagreb, Croatia, 7–9 September 2015; pp. 272–277.
- Chen, K.; Tan, G.; Lu, M.; Wu, J. CRSM: A practical crowdsourcing-based road surface monitoring system. Wirel. Netw. 2016, 22, 765–779. [Google Scholar] [CrossRef]
- Laubis, K.; Simko, V.; Schuller, A. Road Condition Measurement and Assessment: A Crowd Based Sensing Approach. In Proceedings of the Thirty Seventh International Conference on Information Systems, Dublin, Ireland, 11–14 December 2016.
- Kumar, R.; Mukherjee, A.; Singh, V. Community Sensor Network for Monitoring Road Roughness Using Smartphones. J. Comput. Civ. Eng. 2016. [Google Scholar] [CrossRef]
- Lou, S.; Wang, Y.; Xu, C. Study on Calculation of IRI Based on Power Spectral Density of Pavement Surface Roughness. J. Highw. Transp. Res. Dev. 2007, 8, 12–15. [Google Scholar]
- Freschi, V.; Delpriori, S.; Klopfenstein, L.; Lattanzi, E.; Luchetti, G.; Bogliolo, A. Geospatial Data Aggregation and Reduction in Vehicular Sensing Applications: The Case of Road Surface Monitoring. In Proceedings of the IEEE 3rd International Conference on Connected Vehicles & Expo, Wien, Vienna, 3–7 November 2014.
- Central Intelligence Agency. The World Factbook; Central Intelligence Agency: Washington, DC, USA, 2015.
- Gillespie, T.D. Fundamentals of Vehicle Dynamics; Society of Automotive Engineers Inc.: Warrendale, PA, USA, 1992. [Google Scholar]
- Wong, J.Y. Theory of Ground Vehicles; John Wiley & Sons: Hoboken, NJ, USA, 2001. [Google Scholar]
- Ndoye, M.; Vanjari, S.; Huh, H.; Krogmeier, J.; Bullock, D.; Hedges, C.; Adewunmi, A. Sensing and signal processing for a distributed pavement monitoring system. In Proceedings of the 2006 IEEE 12th Digital Signal Processing Workshop & 4th IEEE Signal Processing Education Workshop (DSP/SPE), Teton National Park, WY, USA, 24–27 Septermber 2006; pp. 162–167.
- Bogsjö, K. Road Profile Statistics Relevant for Vehicle Fatigue. Ph.D. Thesis, Lund University, Lund, Sweden, 2007. [Google Scholar]
- Bogsjö, K.; Podgórski, K.; Rychlik, I. Models for road surface roughness. Veh. Syst. Dyn. 2012, 50, 725–747. [Google Scholar] [CrossRef]
- Chalasani, R.M. Ride performance potential of active suspension systems–Part I: Simplified analysis based on a quarter-car model. In Proceedings of the 1986 ASME Winter Annual Meeting, Anaheim, CA, USA, 7–12 December 1986.
- Davis, B.; Thompson, A. Optimal linear active suspensions with integral constraint. Veh. Syst. Dyn. 1988, 17, 357–366. [Google Scholar] [CrossRef]
- Butsuen, T. The Design of Semi-Active Suspensions for Automotive Vehicles. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1989. [Google Scholar]
- Fialho, I.; Balas, G.J. Road adaptive active suspension design using linear parameter-varying gain-scheduling. IEEE Trans. Control Syst. Technol. 2002, 10, 43–54. [Google Scholar] [CrossRef]
- Verros, G.; Natsiavas, S.; Papadimitriou, C. Design optimization of quarter-car models with passive and semi-active suspensions under random road excitation. J. Vib. Control 2005, 11, 581–606. [Google Scholar] [CrossRef]
- Allison, J.T.; Kokkolaras, M.; Papalambros, P.Y. Optimal partitioning and coordination decisions in decomposition-based design optimization. J. Mech. Des. 2009, 131, 081008. [Google Scholar] [CrossRef]
- Salem, M.; Aly, A.A. Fuzzy control of a quarter-car suspension system. World Acad. Sci. Eng. Technol. 2009, 53, 258–263. [Google Scholar]
- Shampine, L.F. Vectorized adaptive quadrature in MATLAB. J. Comput. Appl. Math. 2008, 211, 131–140. [Google Scholar] [CrossRef]
- Gray, A.H., Jr.; Wong, D.Y. The Burg algorithm for LPC Speech analysis/synthesis. IEEE Trans. Acoust. Speech Signal Proc. 1980, 28, 609–615. [Google Scholar] [CrossRef]
- Atal, B.S.; Schroeder, M.R. Predictive coding of speech signals and subjective error criteria. IEEE Trans. Acoust. Speech Signal Proc. 1979, 27, 247–254. [Google Scholar] [CrossRef]
- Jackson, L.B. Digital Filters and Signal Processing, 2nd ed.; Kluwer Academic Publishers: Boston, FL, USA, 1989; pp. 255–257. [Google Scholar]
- Levinson, N. The Wiener RMS error criterion in filter design and prediction. J. Math. Phys. 1947, 25, 261–278. [Google Scholar] [CrossRef]
- Durbin, J. The fitting of time-series models. Revue de l’Institut International de Statistique 1960, 28, 233–244. [Google Scholar] [CrossRef]
- OpenStreetMap Wiki. Key: Highway—OpenStreetMap Wiki. Available online: http://wiki.openstreetmap.org/wiki/Key:highway (accessed on 3 July 2015).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| , , , M, and m | ||||
|---|---|---|---|---|
| Davis and Thompson [41] | 2.653×10 | 0.1326×10 | 0.01651 | 0.06513 |
| Butsuen [42] | 3.375×10 | 0.1078×10 | 0.01672 | 0.06250 |
| Gillespie [35] | 3.375×10 | 0.1057×10 | 0.01673 | 0.06125 |
| Fialho and Balas [43] | 5.356×10 | 0.1093×10 | 0.01909 | 0.05948 |
| Verros et al. [44] | 7.500×10 | 0.2066×10 | 0.02717 | 0.09500 |
| Allison (Comfort) [45] | 1.305×10 | 0.5943×10 | 0.65069 | 0.04930 |
| Allison (Handling) [45] | 0.129×10 | 4.5278×10 | 0.64435 | 3.75576 |
| Salem and Aly [46] | 4.883×10 | 0.1758×10 | 0.01750 | 0.09375 |
| γ | ||
|---|---|---|
| Road | γ | |
|---|---|---|
| Motorway | ||
| Trunk | ||
| Primary | ||
| Secondary | ||
| All |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alessandroni, G.; Carini, A.; Lattanzi, E.; Freschi, V.; Bogliolo, A. A Study on the Influence of Speed on Road Roughness Sensing: The SmartRoadSense Case. Sensors 2017, 17, 305. https://doi.org/10.3390/s17020305
Alessandroni G, Carini A, Lattanzi E, Freschi V, Bogliolo A. A Study on the Influence of Speed on Road Roughness Sensing: The SmartRoadSense Case. Sensors. 2017; 17(2):305. https://doi.org/10.3390/s17020305
Chicago/Turabian StyleAlessandroni, Giacomo, Alberto Carini, Emanuele Lattanzi, Valerio Freschi, and Alessandro Bogliolo. 2017. "A Study on the Influence of Speed on Road Roughness Sensing: The SmartRoadSense Case" Sensors 17, no. 2: 305. https://doi.org/10.3390/s17020305