
Hybrid Visible Light and Ultrasound-Based Sensor for Distance Estimation


 ,
,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
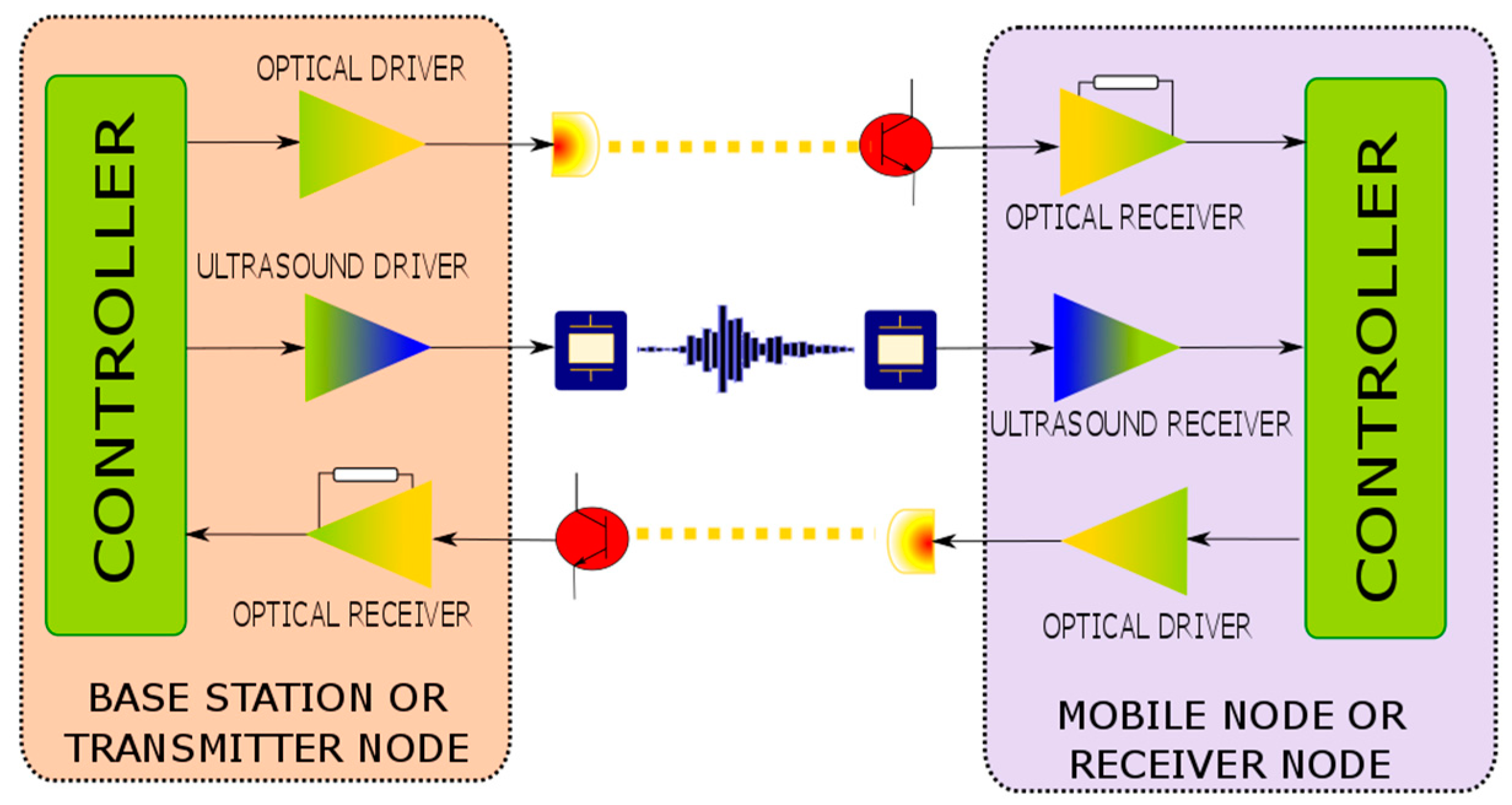
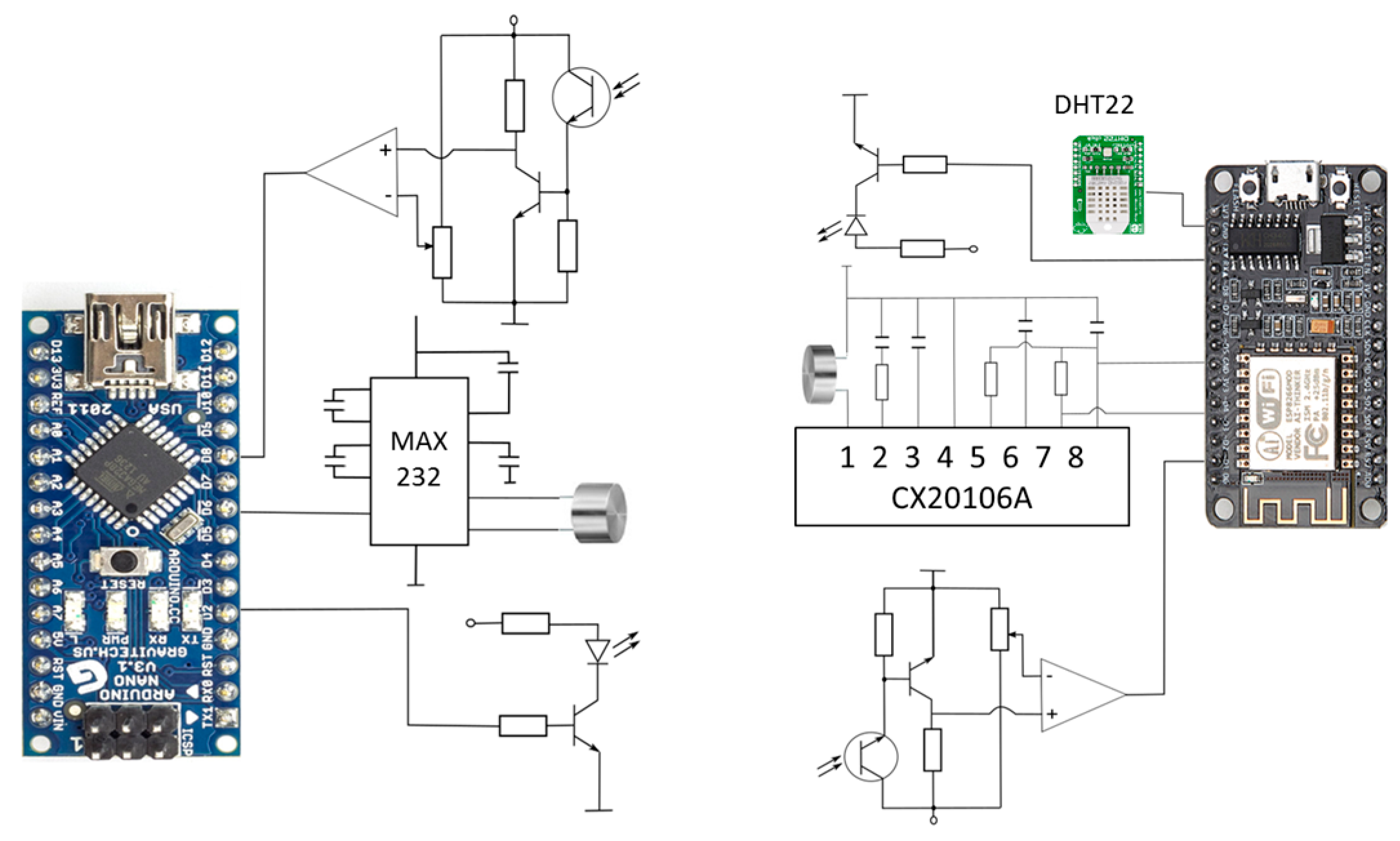
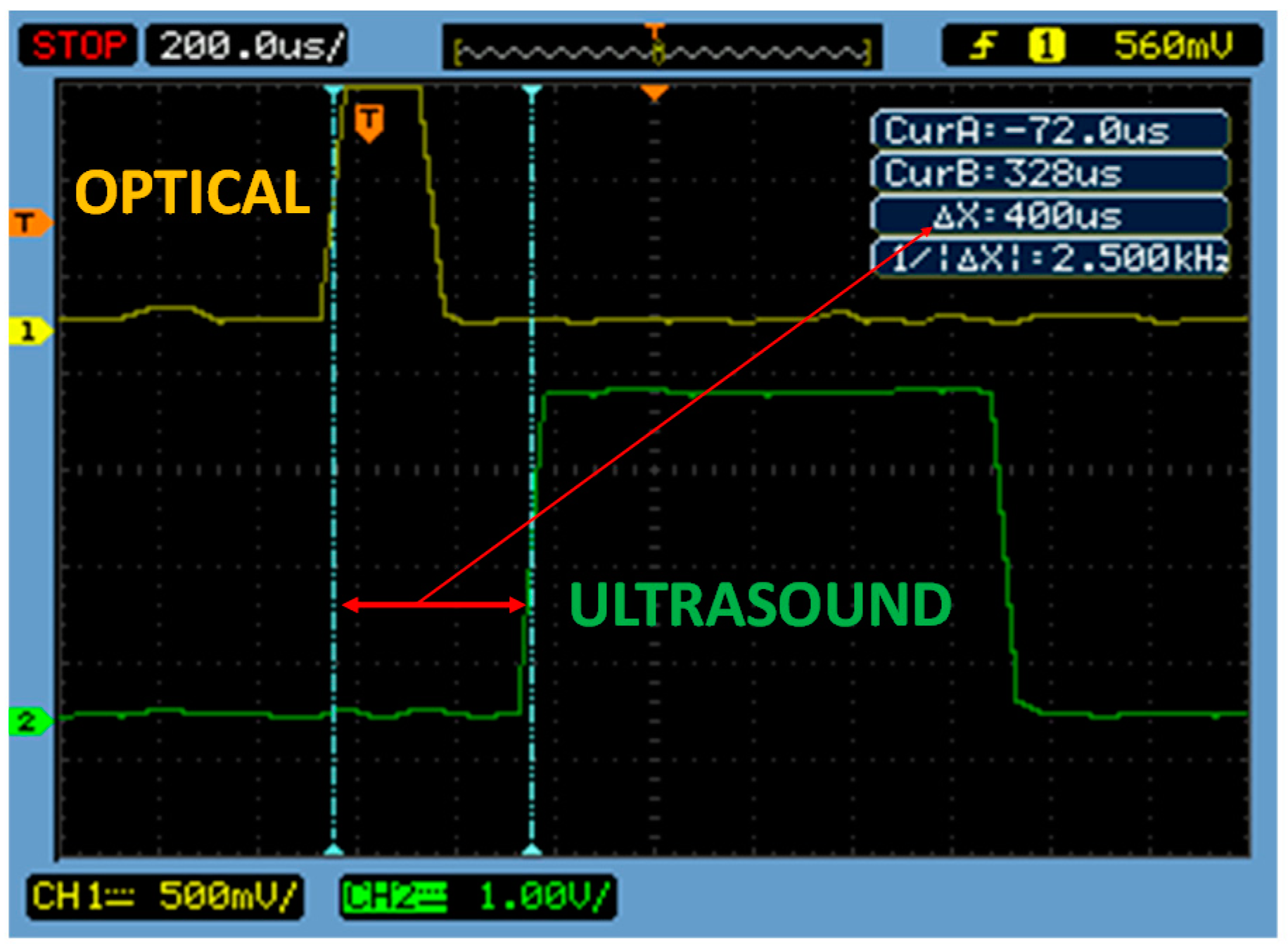
- Base station or transmitter node: is the reference block, with a fixed known position, from where the distance value will be estimated. Furthermore, it starts the measurement process emitting both optical and ultrasound signals, used by the mobile node for distance estimation.
- Mobile or receiver node: represents the other endpoint of the line to be measured, it calculates the distance from the signals generated by the base station. Additionally, it returns a new optical signal to the base station so as to also perform its own distance estimation.
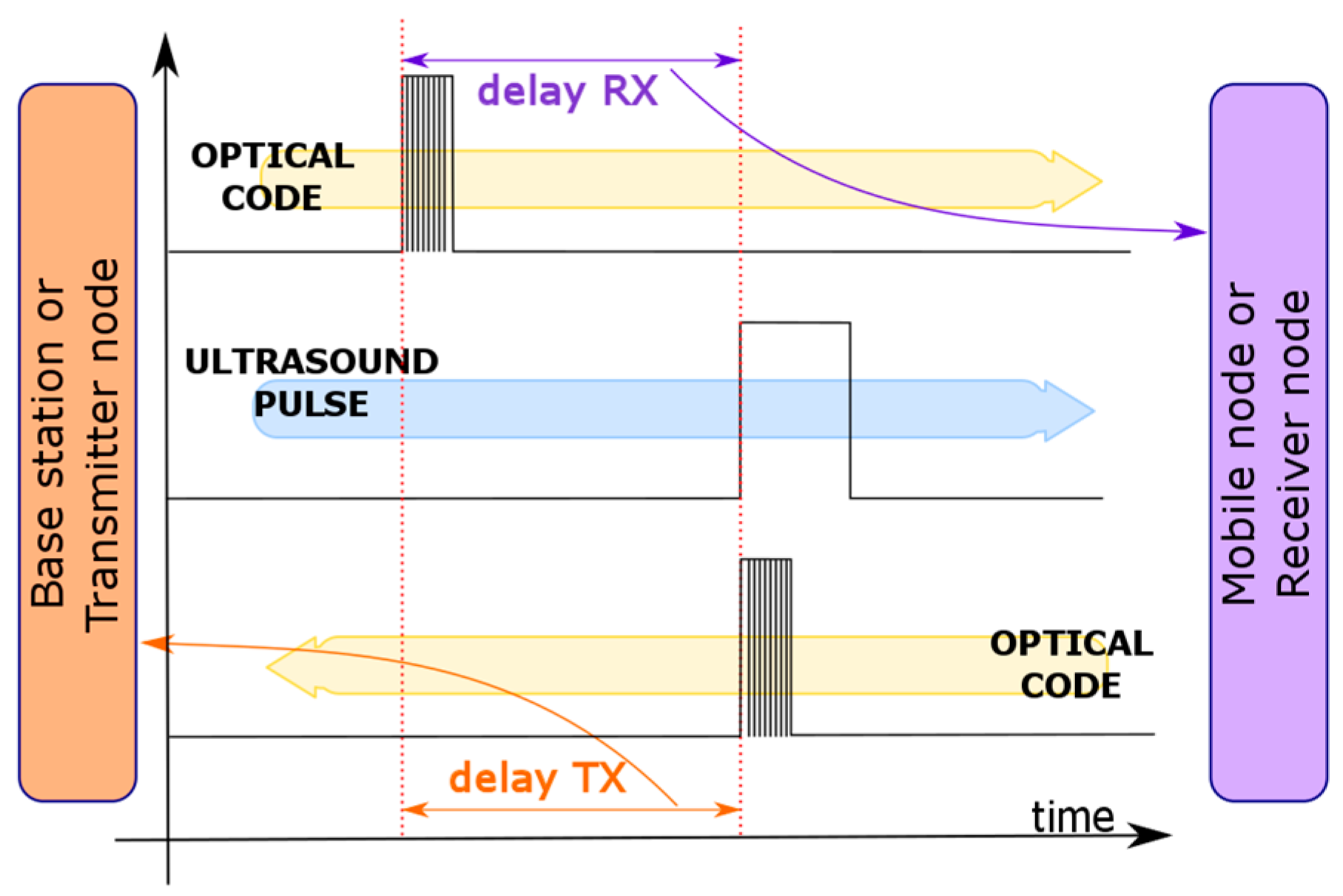
2. System Description
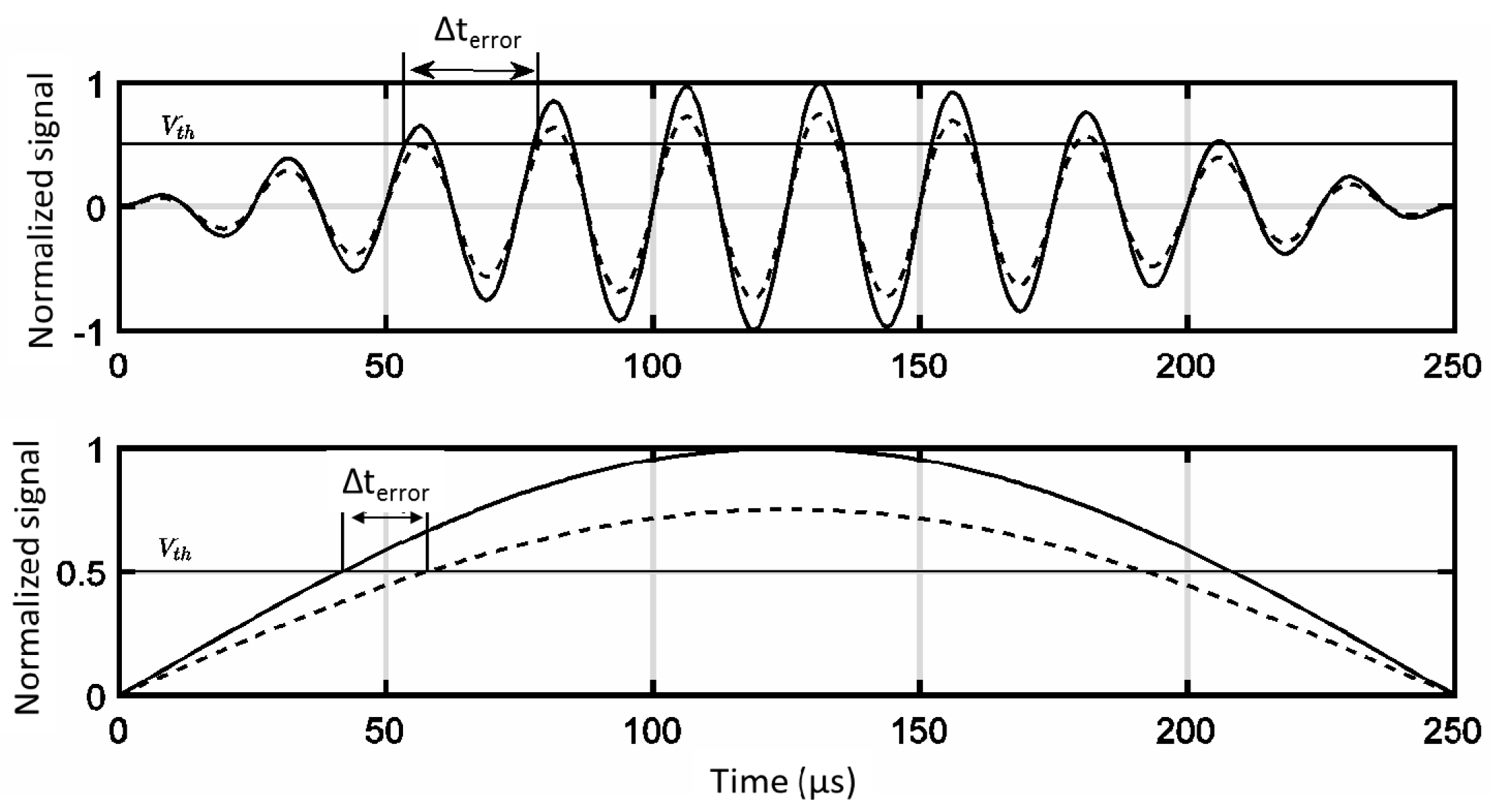
Mathematical Analysis
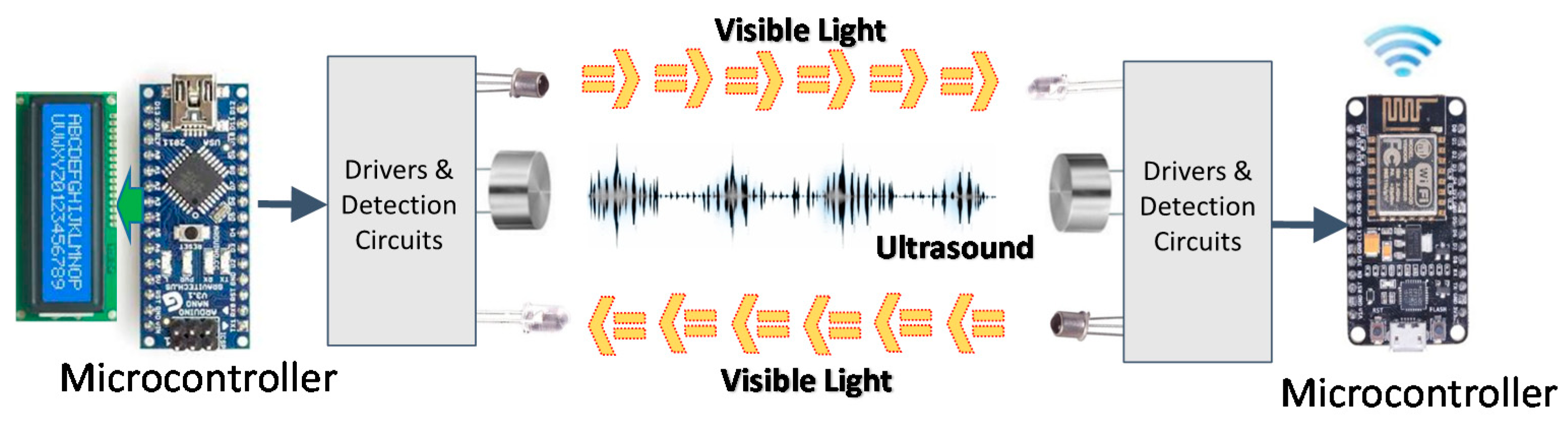
3. System Implementation
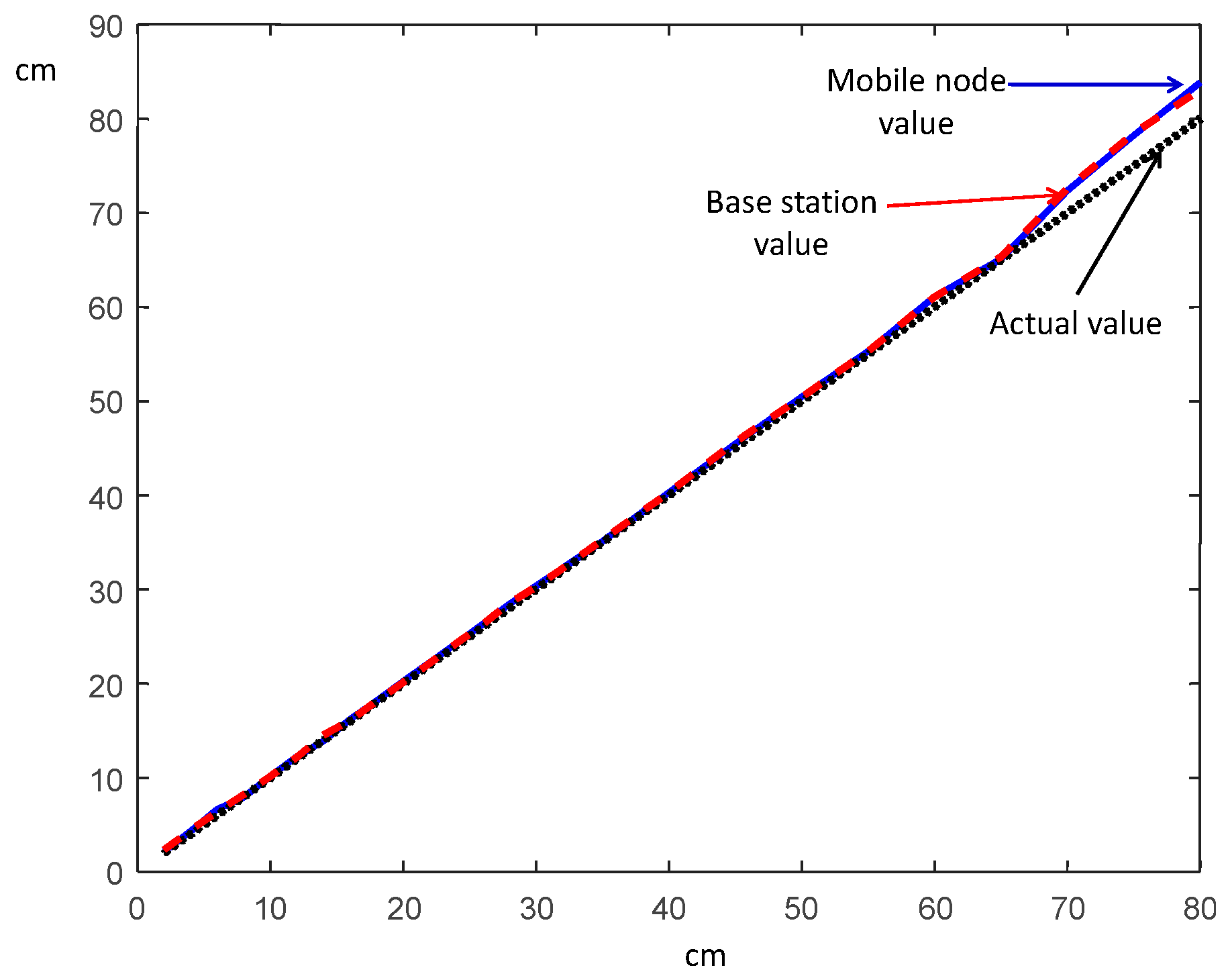
4. Results
5. Discussion
- Accuracy (depending on the application requirements): the harshness of indoor environments on signal propagation, (caused by obstacles, wandering people, shadowing), makes it hard to achieve accuracy. Eventually, it will also be necessary in some study cases to provide not only position in a coordinate system, but also orientation.
- Scalability: Indoor environments often contain a large number of physical objects and a large density of people, all requiring a location. Hence, an indoor location system needs to scale well with the number and the density of users of the system. This is especially true for large scenarios such as airports or dense commercial areas.
- User privacy: The ability to obtain user location without tracking previous positions is important for preserving user privacy.
- Ease of deployment: The location system should be easy to deploy, configure, and maintain. The amount of manual configuration and precise placement should be as small as possible, while accuracy considerations have been discussed in the results section. Ease of maintenance also implies low power consumption (when it is powered by batteries).
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- Wu, L.; Meng, M.Q.-H.; Lin, Z.; He, W.; Peng, C.; Liang, H. A practical evaluation of radio signal strength for mobile robot localization. In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 516–522.
- Rapinski, J.; Smieja, M. ZigBee Ranging using Phase Shift Measurements. J. Navig. 2015, 68, 665–677. [Google Scholar] [CrossRef]
- Pahlavan, K.; Akgul, F.O.; Heidari, M.; Hatami, A.; Elwell, J.M.; Tingley, R.D. Indoor geolocation in the absence of direct path. IEEE Wirel. Commun. 2006. [Google Scholar] [CrossRef]
- Armstrong, J.; Sekercioglu, Y.; Neild, A. Visible light positioning: A roadmap for international standardization. IEEE Commun. Mag. 2013, 51, 68–73. [Google Scholar] [CrossRef]
- Zhang, W.; Kavehrad, M. Comparison of VLC-based indoor positioning techniques. Proc. SPIE 2013, 8645. [Google Scholar] [CrossRef]
- Do, T.H.; Yoo, M. Potentialities and challenges of VLC based outdoor positioning. In Proceedings of the 2015 IEEE International Conference on Information Networking (ICOIN), Seoul, Korea, 12–14 January 2015; pp. 474–477.
- Nakajima, M.; Haruyama, S. New indoor navigation system for visually impaired people using visible light communication. EURASIP J. Wirel. Commun. Netw. 2013. [Google Scholar] [CrossRef]
- Phillips Indoor Positioning White Paper. Available online: http://www.lighting.philips.com/main/systems/themes/led-based-indoor-positioning/white-paper.html (accessed on 11 September 2016).
- Nissanka, B.; Priyantha, A.; Chakraborty, H.; Balakrishnan, H. The Cricket Location-Support system. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking, Boston, MA, USA, 6–11 August 2000; pp. 32–43.
- Smith, A.; Balakrishnan, H.; Goraczko, M.; Priyantha, N. Tracking moving devices with the cricket location system. In Proceedings of the ACM 2nd International Conference on Mobile Systems, Applications, and Services, Boston, MA, USA, 6–9 June 2004; pp. 190–202.
- Priyantha, N.B.; Balakrishnan, H.; Demaine, E.; Teller, S. Anchor-free distributed localization in sensor networks. In Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003; pp. 340–341.
- Priyantha, N.B.; Kansal, A.; Goraczko, M.; Zhao, F. Tiny web services: Design and implementation of interoperable and evolvable sensor networks. In Proceedings of the 6th ACM conference on Embedded network sensor systems, Raleigh, NC, USA, 4–7 November 2003; pp. 253–266.
- Png, L.C.; Chen, L.; Liu, S.; Peh, W.K. An Arduino-based indoor positioning system (IPS) using visible light communication and ultrasound. In Proceedings of the IEEE International Conference on Consumer Electronics-Taiwan (ICCE-TW), Taipei, Taiwan, 26–28 May 2014; pp. 217–218.
- Manolakis, D.E. Efficient solution and performance analysis of 3-D position estimation by trilateration. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1239–1248. [Google Scholar] [CrossRef]
- Ramirez-Aguilera, A.M.; Luna-Rivera, J.M.; Perez-Jimenez, R.; Rabadan-Borges, J.; Guerra, V.; Suarez-Rodriguez, C. Visible Light Communication Constraints in Practical Indoor Lighting Systems. In Proceedings of the 22nd European Wireless Conference European Wireless, Oulu, Finland, 18–20 May 2016.
- Remaggi, L.; Jackson, P.J.B.; Coleman, P.; Wang, W. Room boundary estimation from acoustic room impulse responses. In Proceedings of the 2014 Sensor Signal Processing for Defence (SSPD), Edinburgh, UK, 8–9 September 2014.







© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rabadan, J.; Guerra, V.; Rodríguez, R.; Rufo, J.; Luna-Rivera, M.; Perez-Jimenez, R. Hybrid Visible Light and Ultrasound-Based Sensor for Distance Estimation. Sensors 2017, 17, 330. https://doi.org/10.3390/s17020330
Rabadan J, Guerra V, Rodríguez R, Rufo J, Luna-Rivera M, Perez-Jimenez R. Hybrid Visible Light and Ultrasound-Based Sensor for Distance Estimation. Sensors. 2017; 17(2):330. https://doi.org/10.3390/s17020330
Chicago/Turabian StyleRabadan, Jose, Victor Guerra, Rafael Rodríguez, Julio Rufo, Martin Luna-Rivera, and Rafael Perez-Jimenez. 2017. "Hybrid Visible Light and Ultrasound-Based Sensor for Distance Estimation" Sensors 17, no. 2: 330. https://doi.org/10.3390/s17020330