1. Introduction
Recently, UWSNs have gained much attention due to high demand of these networks in many applications. Like prediction of natural disasters, security, measurement of water traits, exploration of underwater world, pollution control, exploration of natural resources in underwater, etc. However, unique characteristics of the aquatic environment have posed many challenges for underwater communication [
1], like low bandwidth, high propagation delay, path loss, high bit error rate (BER), etc. resulting in high energy consumption, low reliability of data packet delivery, etc. [
2].
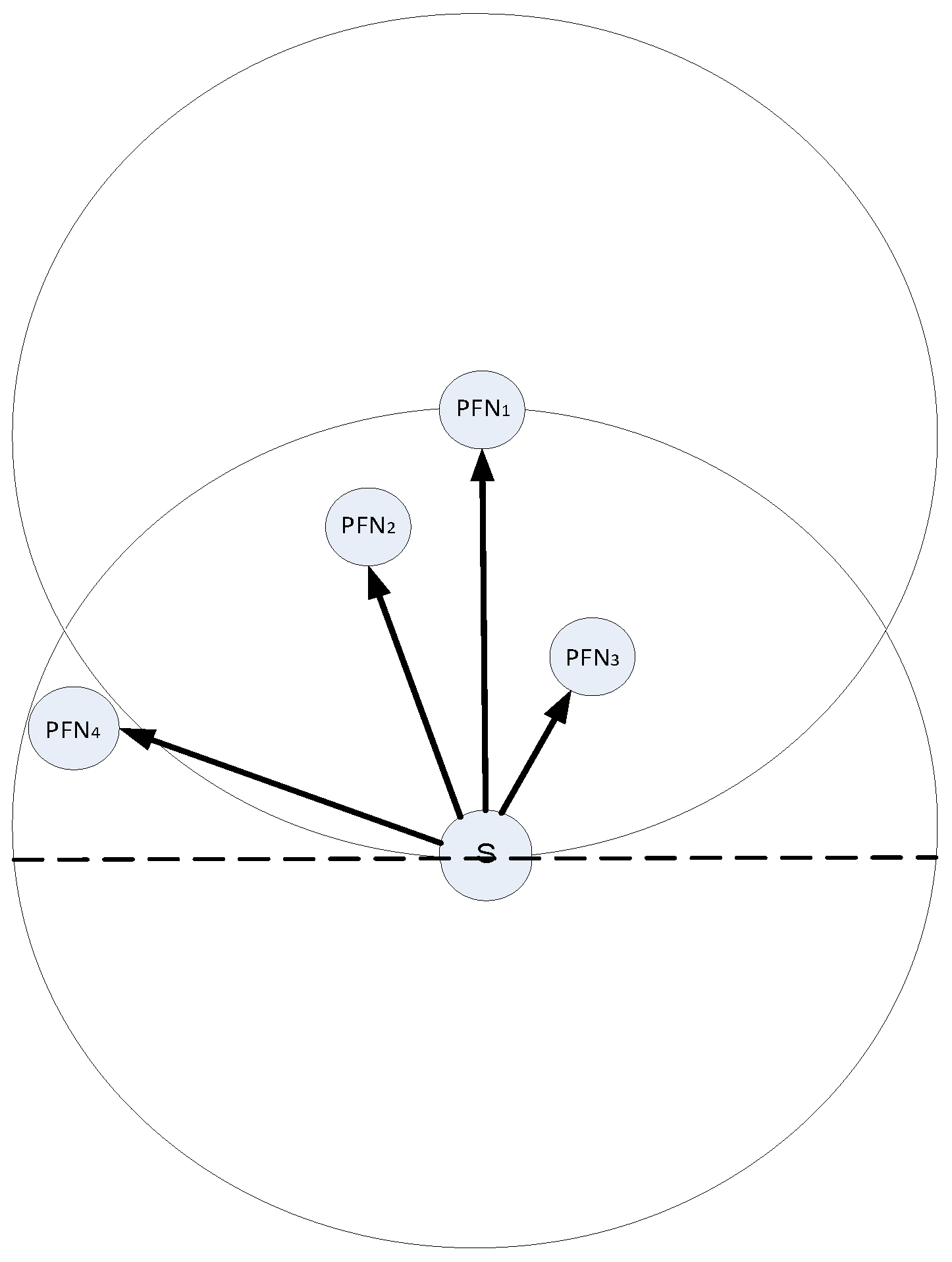
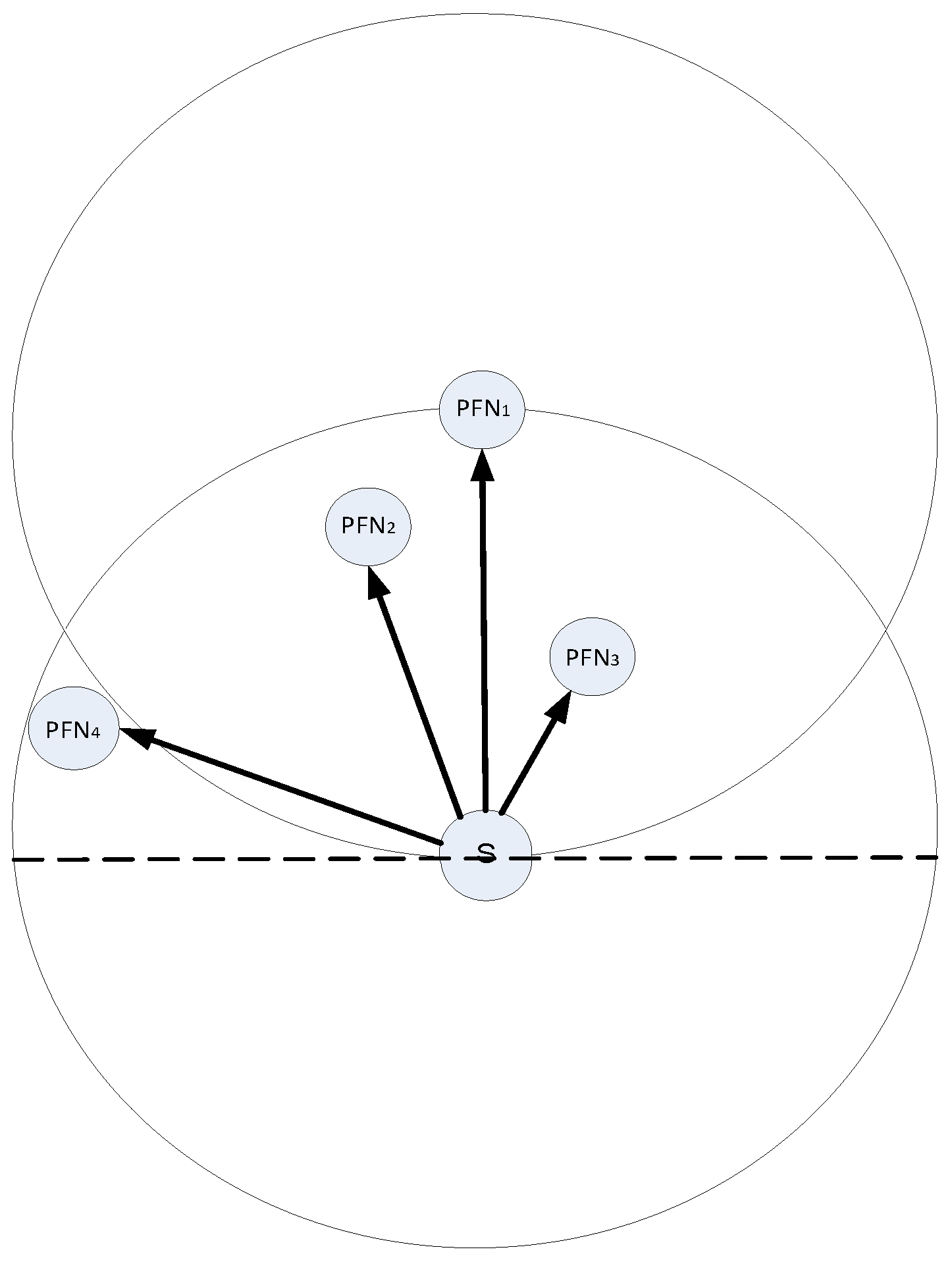
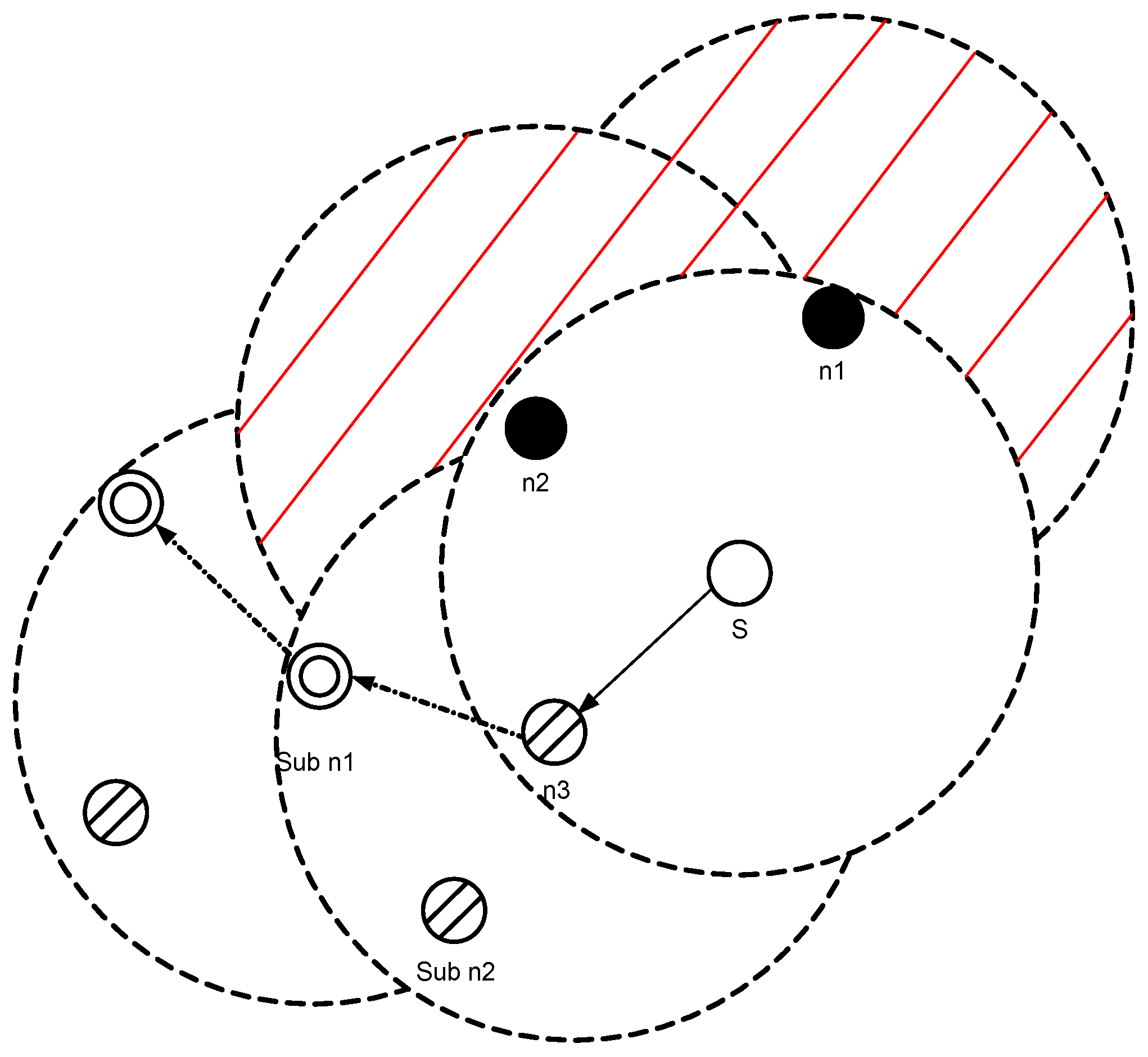
In such conditions, opportunistic routing is a remarkable technique in sensor networks due to its redundant transmissions. However, the reliability is achieved by redundant packet transmission that is one of the influential factor on the performance of the opportunistic routing. As shown in
Figure 1, let a source node (S) broadcasts a data packet to its neighbor nodes (
,
,
,
), the
has highest priority because it is deployed near the sink. It will forward a data packet and acknowledge its neighbor nodes in its transmission range
,
. The
will not overhear the acknowledgement from
because it is deployed outside its transmission range. Therefore, after its specific holding time, it will consider that the data packet is not forwarded and it broadcasts the data packet resulting in redundant transmission and unnecessary energy will be consumed [
3].
Although some pressure based routing protocols for underwater sensor networks [
4] take advantage of the redundant transmissions to recover the data packets from void holes. Similarly, in [
5], the authors proposed analysis of the cooperative routing with incremental best relay scheme. In this scheme, a single bit message received from a node that indicates whether the data packet transmitted directly, received successfully or not. If the data packet is not within the predefined threshold then a relay node broadcasts the data packet which is combined at the destination to obtain the error free packet. Authors [
6] presented void aware pressure routing (VARP) algorithm to propagate periodic beacon messages in the entire network for establishing paths to the nearest sink. The data packets are relayed via multiple paths to the destination for reliable data delivery. Similarly, the authors in [
7] suggested an energy efficient cooperative scheme for the selection of the best relay node amongst the successful candidates at each hop those received the data packet successfully.
However, limitations of [
4,
5,
6,
7] are: (1) long routing paths lead to the path loss and high propagation delay; (2) They are efficient in dense network conditions however when the network sparsity increases, the length of routing paths increases that increase the breakage probability of the path from the source to the destination resulting in high packet drop ratio. Therefore, Co-Hydrocast, improved Hydrocast and Co-improved Hydrocast opportunistic based routing protocols are proposed in this paper. These protocols are presented to increase the network throughput and reliability of the data transmissions in the dynamic nature of the aquatic environment by shortening the recovery path between the source and the destination. These routing techniques avoid void node occurrence by obtaining neighbors of a next relay node up to two hops. Each forwarding node selects its best relay node having at least one neighbor and minimum distance relative to the sink. The redundant transmissions are avoided while ensuring that each candidate node listens to each other before transmitting a data packet towards the destination that results in minimum energy consumption and high network throughput.
The rest of the paper is organised as follows: In
Section 2 related work is presented. Details of our proposed schemes are discussed in
Section 3.
Section 4 validates the performance through simulation results of our proposed techniques. Trade-offs are given in
Section 5. Finally
Section 6 concludes our proposed work by discussing the findings of our proposed schemes.
2. Related Work
Many routing protocols are proposed for energy efficiency in UWSNs. Like depth based routing protocol (DBR) [
8] uses depth only as a routing metric for data packet forwarding from a source node to a destination. In this protocol, a node with lowest depth from the source node with respect to sink is selected as a next hop forwarder. This process repeats until the packet reaches the destination. The packet forwarding decision is made locally at each hop to select a best next hop forwarder. It performs better at dense network in terms of network throughput and consumes comparatively less energy. However, in sparse deployment, the breakage probability of a path between the source and the destination increases due to dynamic nature of underwater environment. Also lengthy paths results in more energy consumption and low packet delivery ratio. Moreover, the chances of void hole occurrence increases.
The authors present an energy efficient depth based routing protocol (EEDBR) in [
9] that considers both residual energy and depth of a sensor node as routing metrics for data forwarding. Like DBR, EEDBR also forwards data packets towards the sink using greedy approach. Before transmitting the data packet, a source node looks for a next hop forwarder that has high residual energy from his neighbor nodes and lowest depth. The EEDBR achieves energy efficiency and network throughput comparatively higher than the DBR. However, limitations still exists that void nodes occurrence increases when network becomes more sparse resulting in high energy consumption on sensor nodes near the sink and degrades the network performance.
In [
10], the authors present a weighting depth and forwarding area division DBR (WDFAD-DBR) routing protocol for UWSNs. It makes the routing decisions based on the sum of the depth difference between two hops (depth difference from current node to next neighbor node and from next neighbor node to its neighbor node) to avoid the void holes. WDAFD-DBR uses the reuleaux triangle to ensure that every neighbor node overhear the data transmission from a high priority neighbor node for eliminating the redundant transmissions to conserve the network energy. The neighbor node priority is defined on the basis of depth from the sink which is used for calculating a holding time of low priority sensor nodes to suppress the transmission for specific time. This scheme achieves reliable data delivery in sparse conditions, less energy consumption by dividing the forwarding area, and end to end latency is also minimized.
Ayaz et al. [
11] propose a distributed routing protocol called hop by hop dynamic addressing based routing (H2-DAB). Each Node maintains two types of IDs called node ID and hop ID based on its distance from the sink. A sensor node that has the lowest distance, gets the smallest hop ID and vice versa that helps the sender node in nominating a next hop forwarder. It does not requires dimensional information, however, H2-DAB utilizes the multiple sink architecture to enhance the packet delivery ratio at the cost of high propagational delay and maximal energy consumption.
Yoon et al. [
12] improve the network lifetime by using AUVs (Autonomous Underwater Vehicles) as relay nodes for collecting data packets from sensor nodes. After collection of packets, these AUVs transmit the data to the sink. This routing protocol is proposed for large scale networks to minimize the energy consumption and enhance the data delivery ratio. It minimizes long data paths by using AUVs as relay nodes on elliptical paths to gather data packets from sensor nodes directly and via multi-hopping. However, it achieves high network throughput and optimal network lifetime at the cost of end to end delay.
Authors in [
13] present an energy efficient routing protocol that choose a next forwarder node having high link quality, minimum number of hops, and high residual energy among his neighbor nodes. It spread the data traffic from a high residual energy node to low residual energy nodes to balance the energy consumption across the network for enhancing the network lifetime. The data packet forwarding decisions are taken locally on the basis of shortest path between the sender and the receiver. This scheme achieves optimal network lifetime by balancing the energy in the network.
In [
6], the authors introduce void aware pressure routing protocol (VARP) in UWSNs. In entire network, periodic beacon messages are propagated which are used to set up next hop forwarders and establish routing paths to the nearest sink. It uses the directional opportunistic forwarding mechanism to forward a data between the source and the destination. With the use of directional forwarding, data packets are delivered even in the presence of void nodes because at each hop, it is checked that if next node is a void then it changes the direction of the forwarding data, otherwise same routing path is used that established via beacon message, to send the data towards the destination.
Geographic and opportunistic routing for UWSNs (GEDAR) is presented in [
2]. It is an any-cast routing protocol in which sensor nodes broadcast data packets to multiple sinks in their transmission range. When a source node finds no neighbor in its vicinity then it looks for the recovery procedure to adjust the depth of a sensor node in order to find forwarder node. During the data forwarding, at each hop sensor nodes propagate beacon messages to locate a next forwarder node with minimum distance than the current node with respect to the sink. It takes advantage of the opportunistic routing redundant transmissions for reliable data packet delivery at the destination. GEDAR achieves high packet delivery ratio, avoids void holes, and also provides the recovery mechanism (depth adjustment) to recover data from a void region.
Taking advantage from the broadcast nature of wireless sensor networks, authors in [
7] present a novel scheme for cooperative communication calls energy-efficient cooperative communication scheme (EECC). At each transmission, a best node is selected as a cooperative relay from the set of nodes which successfully receive the transmitted data packet.
In [
14], an efficient routing protocol is presented that uses mobile sinks and cooperative routing. Nodes select their relays and destination nodes based upon their depth information. Data packets are directly transmitted from sender nodes to the receiver nodes and also via relay nodes. Destination nodes after combining both copies of the same signal, transmits the combined signal to the mobile sink. Different mobile sinks at different depths, collect data packets from destination nodes, to improve the network throughput and reduce the packet drop ratio. However, the message exchange overhead is high resulting in high energy consumption of the network.
In [
15], a time of arrival ranging mechanism is introduced to limit the redundant transmissions issue in DBR routing protocol, and two different techniques are proposed: the first scheme focuses on energy efficiency, while the second scheme is presented for delay intolerant applications. In the former scheme, a holding time is computed on the basis of depth from the sink and only high priority node transmits the data packet and acknowledge the other neighbor nodes to drop the respective packet. It performs better in terms of energy consumption by avoiding the redundant packet transmission at the destination. In later one, the end to end delay is minimized at the cost of energy.
Fatemeh et al. [
16] propose a scheme for reducing collision probability by combining route selection, cooperative transmission and optimal power allocation. This algorithm chooses a path with less collision probability for forwarding data packets. The path with less collision is selected by cooperative transmission and power allocation to minimize the collision and that helps to restrict the collision outage probability within the predefined threshold. This mechanism is repeated at each link until the data packet reaches the sink. It proves that to minimize the collision probability, collision awareness at a link is very essential to enhance the network performance.
Authors in [
5] introduce performance analysis of cooperative routing with incremental best relay technique. In this technique, a single bit message response from the receiving node indicates whether the direct transmitted packet received successfully or not. In case of failure, optimum relay forwards the received signal to the destination. However, in this scheme high packet drop ratio is the main constraint.
A scheme for maximizing the network lifetime using mobile nodes is introduced in [
17]. This scheme is designed particularly for applications in which delay can be tolerated. Due to no time bound for data transfer in case of random mobility of the mobile sink results in data overflow from the mobile sink buffer and leading to high packets drop rate.
Authors in [
18] present a balanced energy consumption routing technique in UWSNs. They use a static underwater sink, while sensor nodes move around the sink at low speed. An optimum energy level is defined to balance the energy consumption in the entire network. It consists of two phases: route establishment phase and balanced data transmission phase. In route setup phase, relay nodes are selected those have minimum distance from the sink and a cost function is also computed at each hop to select a best next forwarder node. Whereas in data transmission phase, residual energy of transmitting node is divided in to
n levels, if next node have higher residual energy from that particular level of source node is selected as a next hop, this process repeats until a data packet is delivered to the destination.
In [
19], a cooperative transmission scheme is presented for a clustered network. In this scheme, a cluster head broadcasts data packet in two phases; inter-cluster and intra-cluster. In the first phase, the cluster head transmits the data packet with low transmission power, and all sensor nodes within the cluster that successfully decode the data packet are selected as relay nodes. In the second phase; the cluster head directly transmits the data packet and also via all selected relays to the neighboring cluster heads. However, if the network density is high and each cluster includes high number of sensor nodes, then the energy consumption of the network increases.
Authors in [
20] propose two energy balanced routing protocols for UWSNs. The first one is, an efficient and balanced energy consumption technique (EBET), it avoids direct transmission over long distances by keeping the direct transmissions at each hop within or equal to the optimum distance threshold. In the second technique, an enhanced EBET (EEBET), entire network energy is balanced by considering depth threshold that balances the energy within the sectors to prolong the network lifetime. However, the prolongation of the network is achieved in both schemes at the cost of propagational delay. Summary of the related work is shown in
Table 1.
3. Our Proposed Work
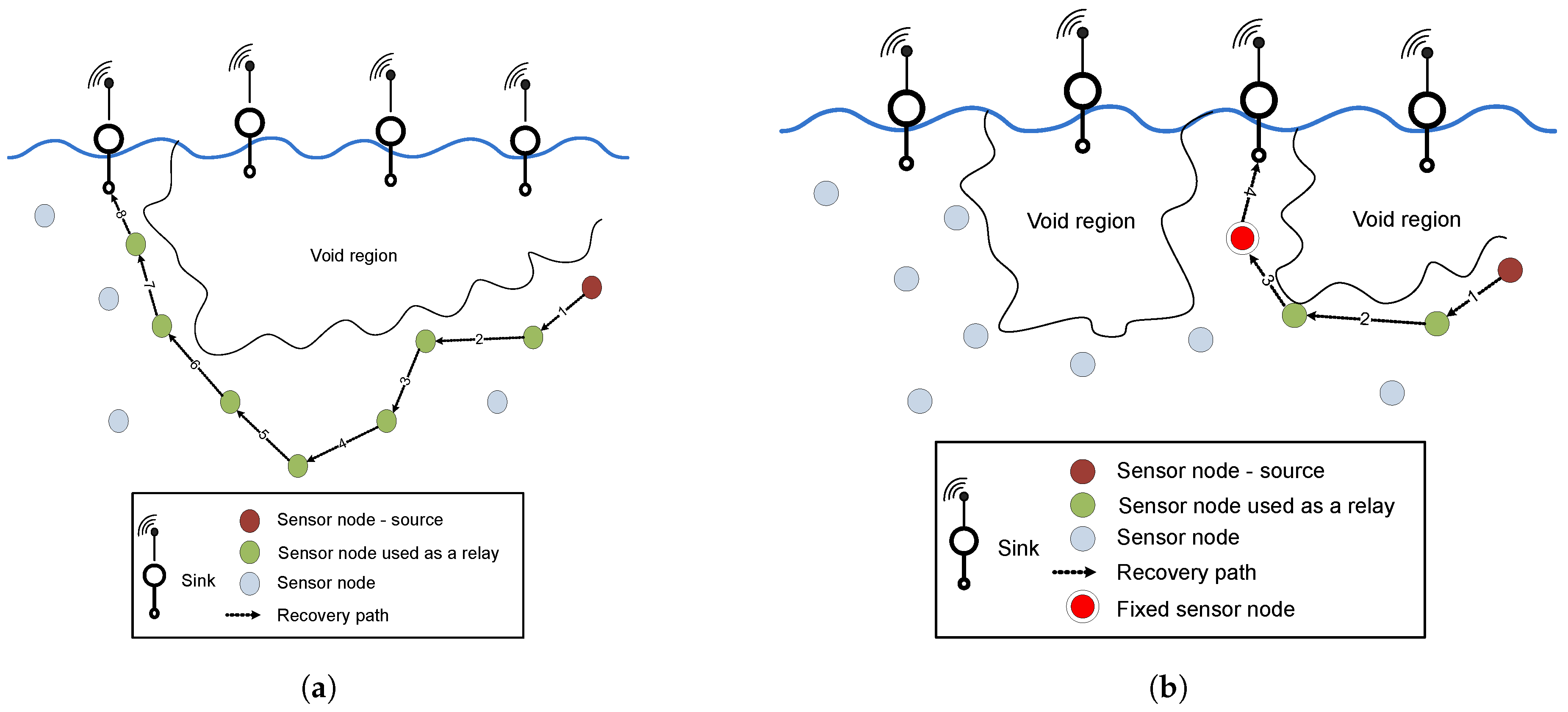
In Hydrocast [
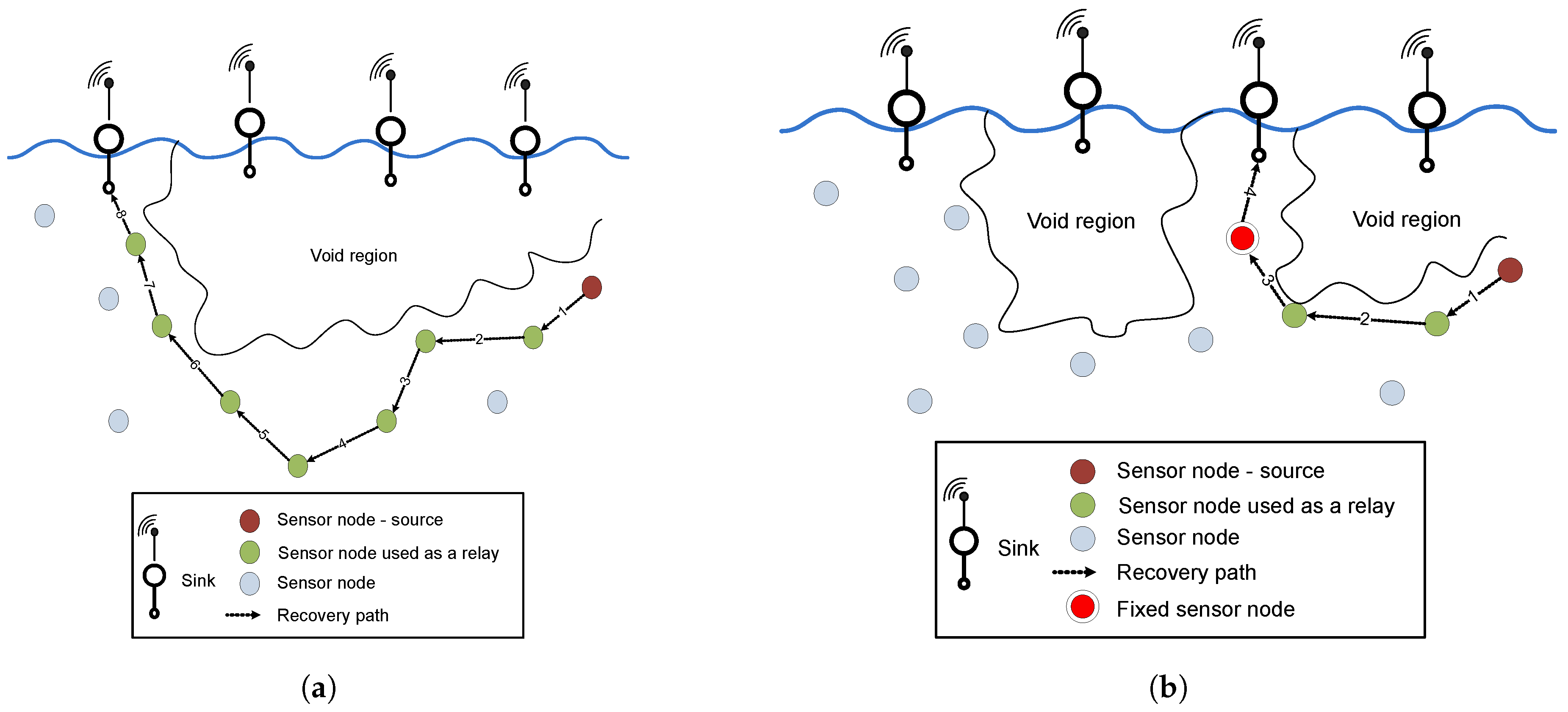
4], the authors introduce a recovery mechanism called lower depth first method, for routing data packets from void nodes. Data packet drop issue is minimized to some extent via this recovery method and the protocol shows good performance when the network density is high. However, long recovery paths are established for data packet delivery from void nodes in the sparse network conditions as shown in
Figure 2a. When the network density decreases, the probability of a lengthy recovery path establishment increases, due to which many nodes are involved in forwarding data packets to the nearest sink. This problem results in high average end-to-end latency and high energy consumption in the network.
We use the opportunistic routing technique to enhance the network throughput and also exploit the strategic locations in the network for the deployment of nodes to minimize the average propagation delay. In this paper, three opportunistic routing techniques are proposed: Improved Hydrocast, Co-Hydrocast, and Co-Improved Hydrocast. Details are given in the following subsections.
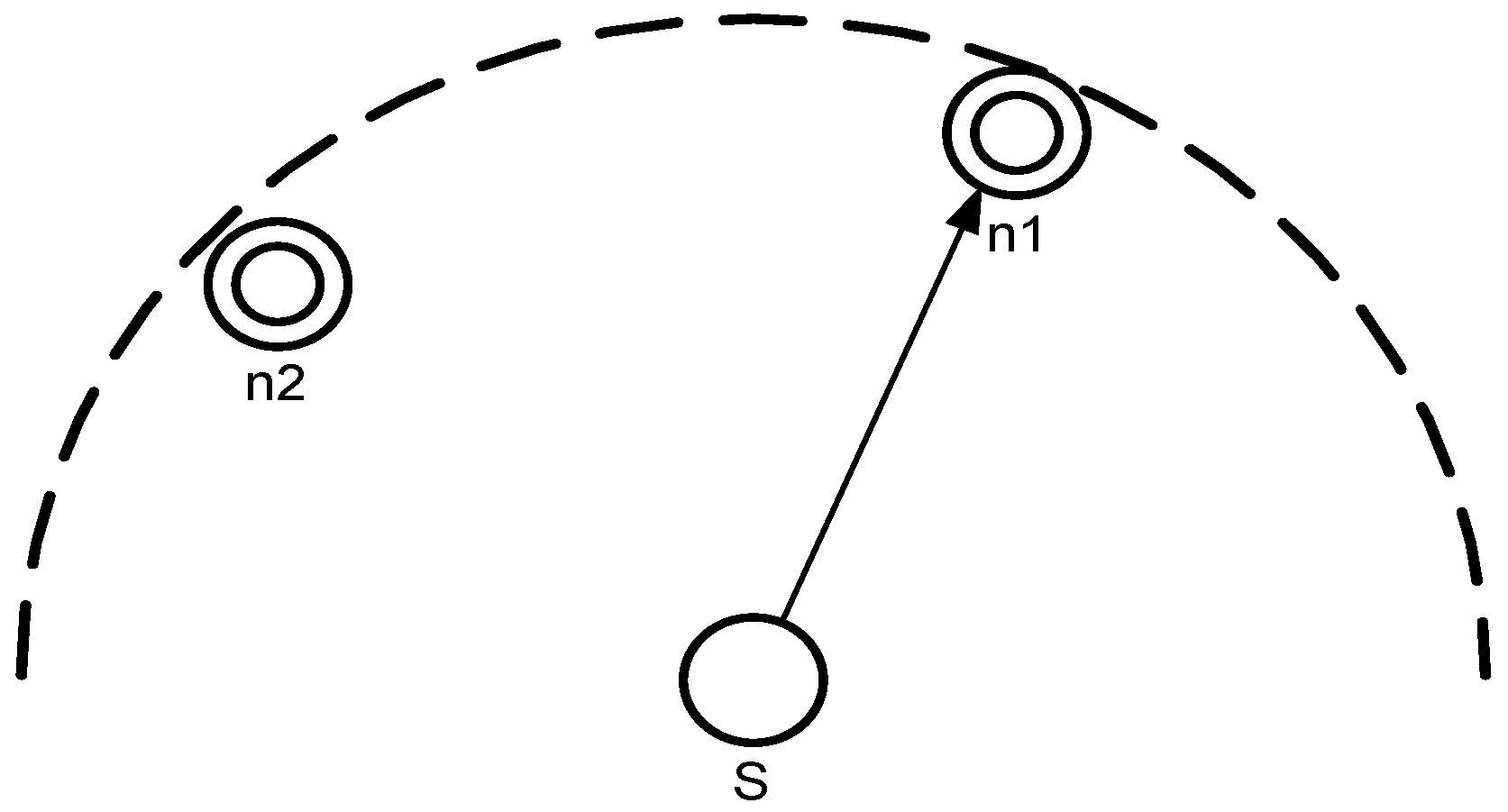
3.1. Forwarding Set Selection
The mechanism of a forwarder set is same for all the schemes (Improved Hydrocast, Co-Hydrocast, and Co-Improved Hydrocast). In the proposed schemes, sensor nodes are assumed static [
21,
22], all nodes find their neighbors and sub neighbors, and calculate their Euclidean distance with neighbors. Suppose that a source node has a set of neighbors
in which
k neighbors are sorted based on their progress towards the destination and the packet delivery probability [
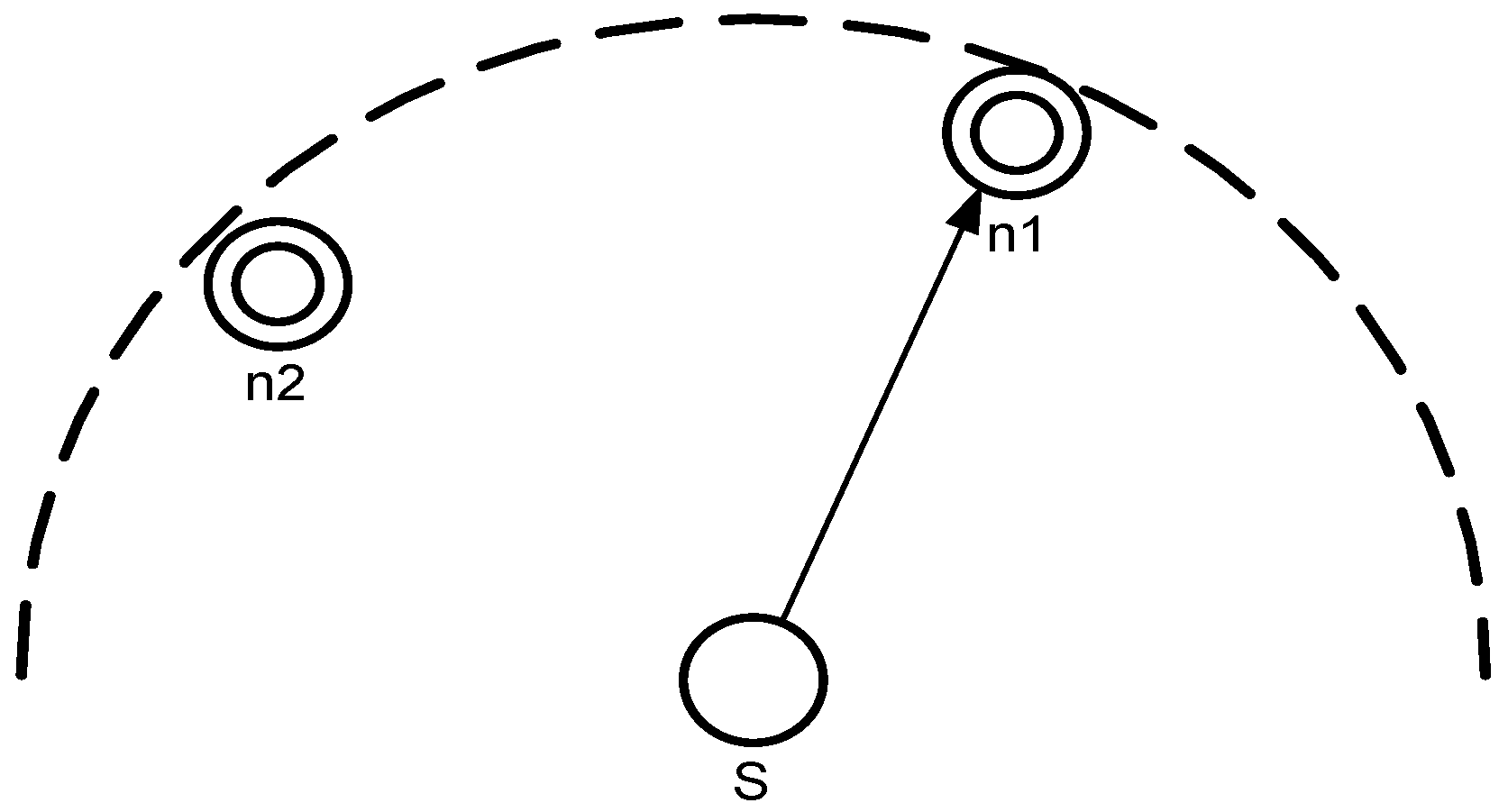
23]. The priority is given to nodes that are closed to the sink with at least one neighbor as shown in
Figure 3 that source node
S has two lower pressure level neighbor nodes
and
.
has lower pressure level and it is closer to the destination, so it is selected as a next hop forwarder and calculated according to Equation (
1).
Where
θ varies between 0–180 degree for forwarder selection,
and
shows the origin of the source node,
is the radius of transmission range and
and
are the co-ordinates of the next forwarder nodes.
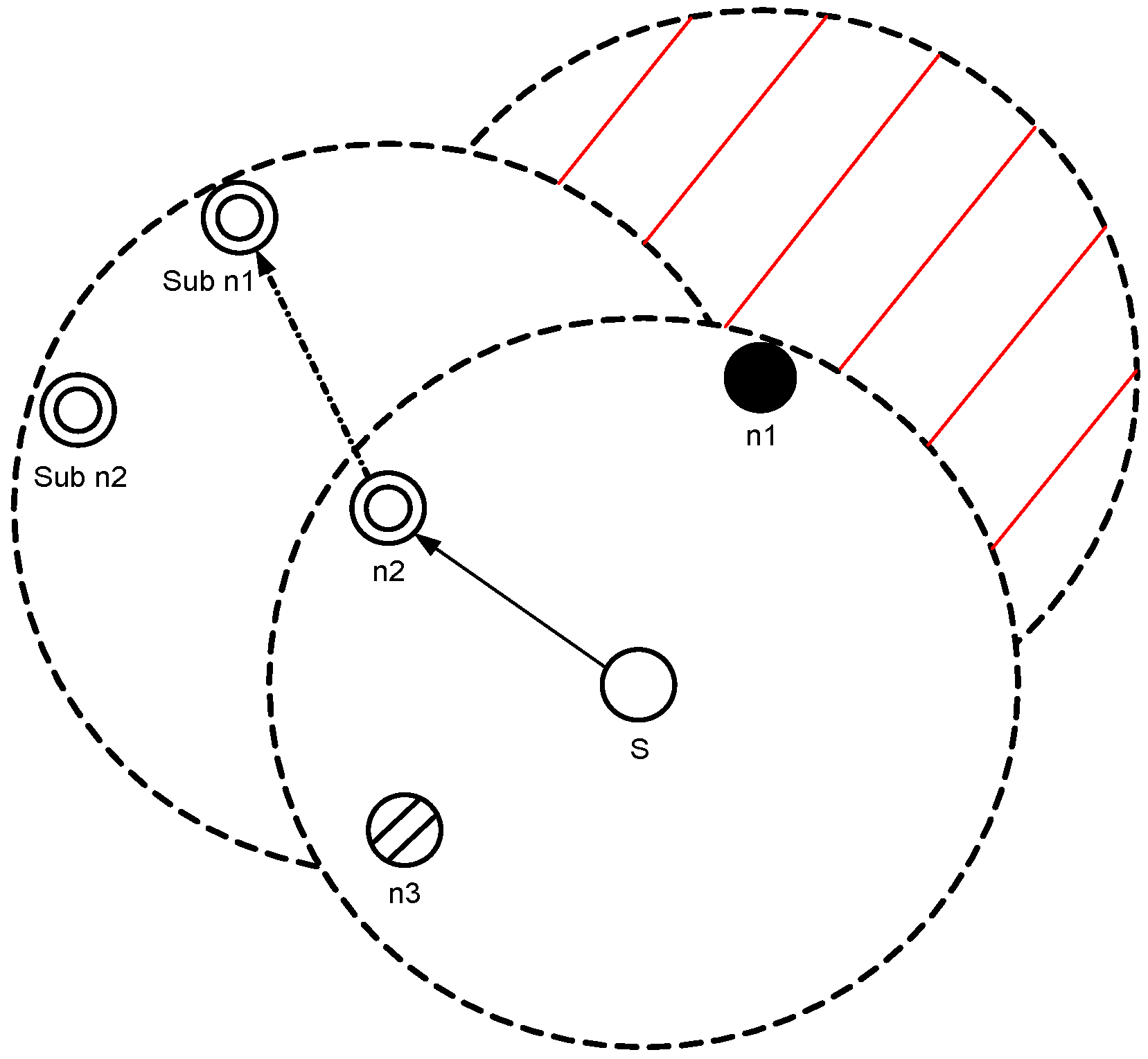
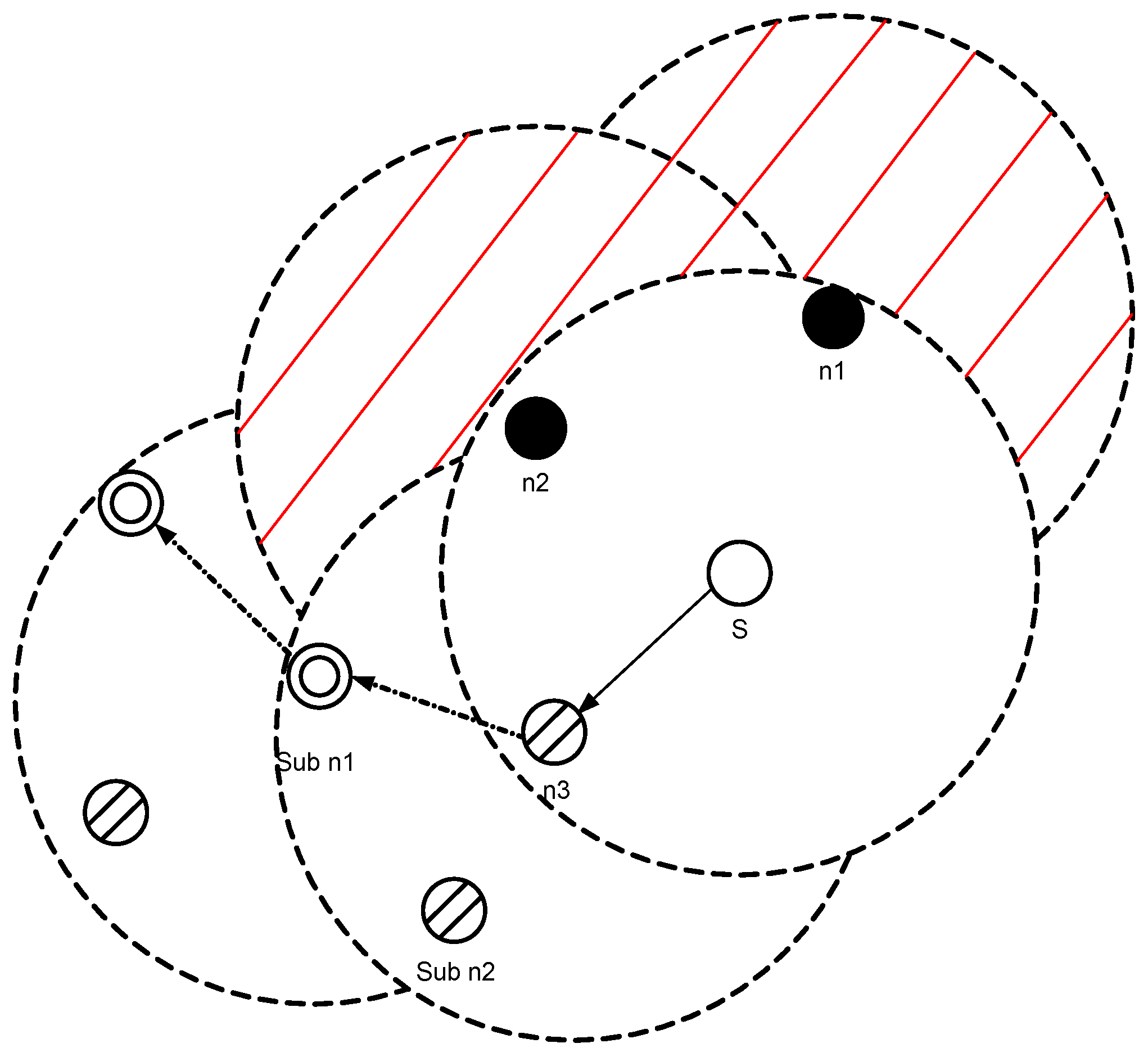
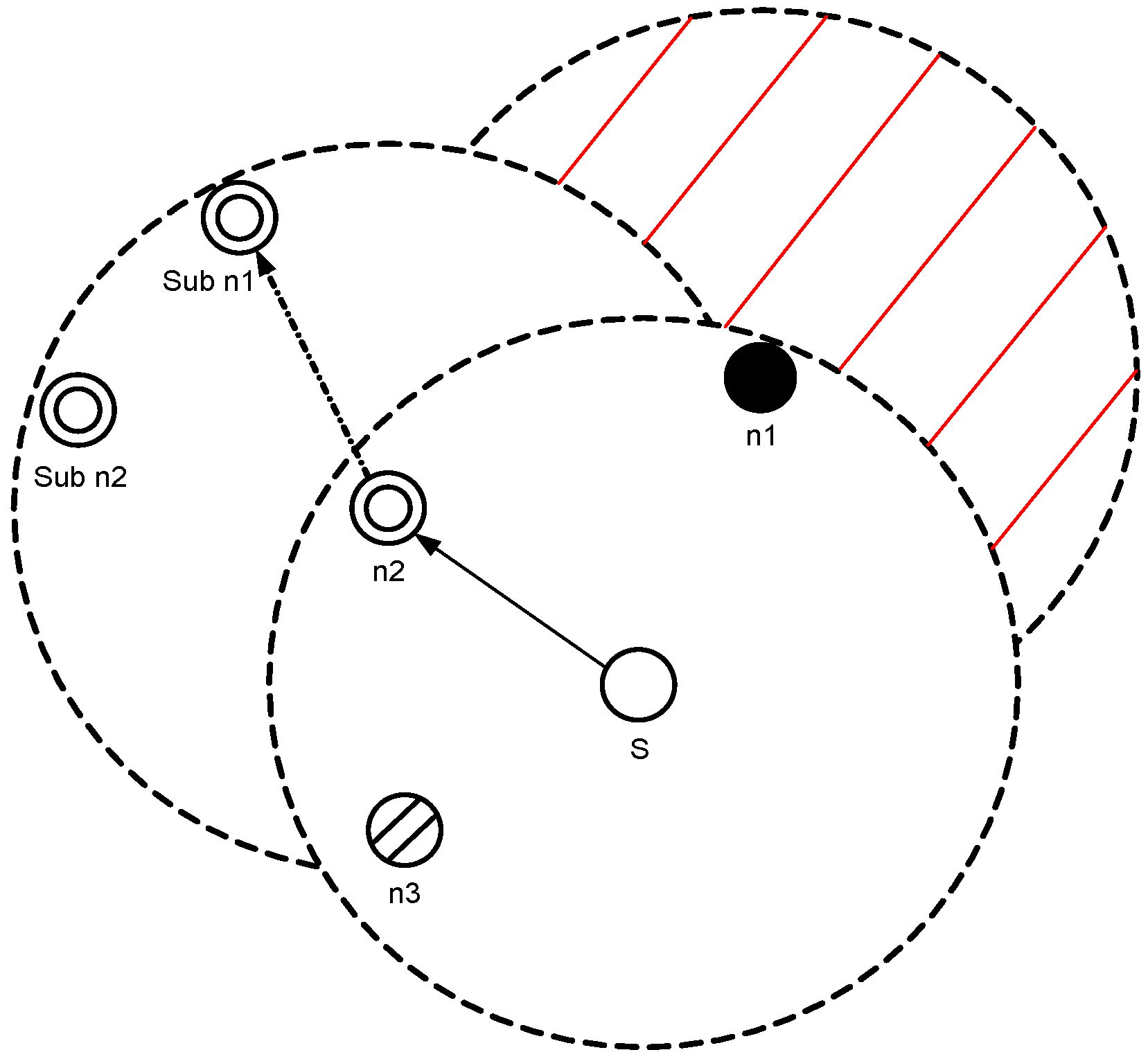
A void node is not selected as a forwarder as shown in
Figure 4, S has three neighboring nodes
,
and
within its transmission range.
is a void node, and
has higher pressure level than
S.
is not a void node and it has two neighbors (sub
and sub
).
also has lower pressure level than
S, therefore
has the highest priority to be chosen as a forwarder. The expected packet advancement (EPA) [
24] is given in Equation (
2).
where
denotes the number of neighbors of the
, higher the number of neighbors greater is the probability of packet advancement. Suppose we have one neighbor and its sub neighbors are zero then the probability of a packet to reach its destination is zero according to Equation (
2). Whereas in other case, when neighbor nodes are greater than one, then the probability of packet delivery is high and so on. Even if a
S neighbor nodes with same number of sub neighbor nodes then the decision is made on the basis of low pressure than
S. Where
is the
neighbor progress towards the destination (in meters), and
is the
neighbor packet delivery probability. The neighbor with the highest priority becomes the next hop forwarder and if it fails to transmit the data packet, then a next neighbor with high priority contributes to deliver the data
. The average holding time (AHT) for a candidate node is calculated as given in Equation (
4).
is computed according to the Equation (
5).
where
is a holding time,
is the acoustic channel speed (1500 m/s),
denotes the weight function,
represents a pressure level of a node, and
is a path loss between the source and the destination.
When a node transmits a data packet, all neighbors those receive the data packet, set a holding time according to Equation (
4). A priority is given to a neighbor node which is not a void node and has a less holding time. The selected forwarder node transmits the received data packet, if the received data packet SNR is not within a predefined threshold then nodes start cooperation that is discussed in
Section 3.5. A node with the second highest priority acts as a relay node in the cooperation process which is discussed in
Section 3.4.
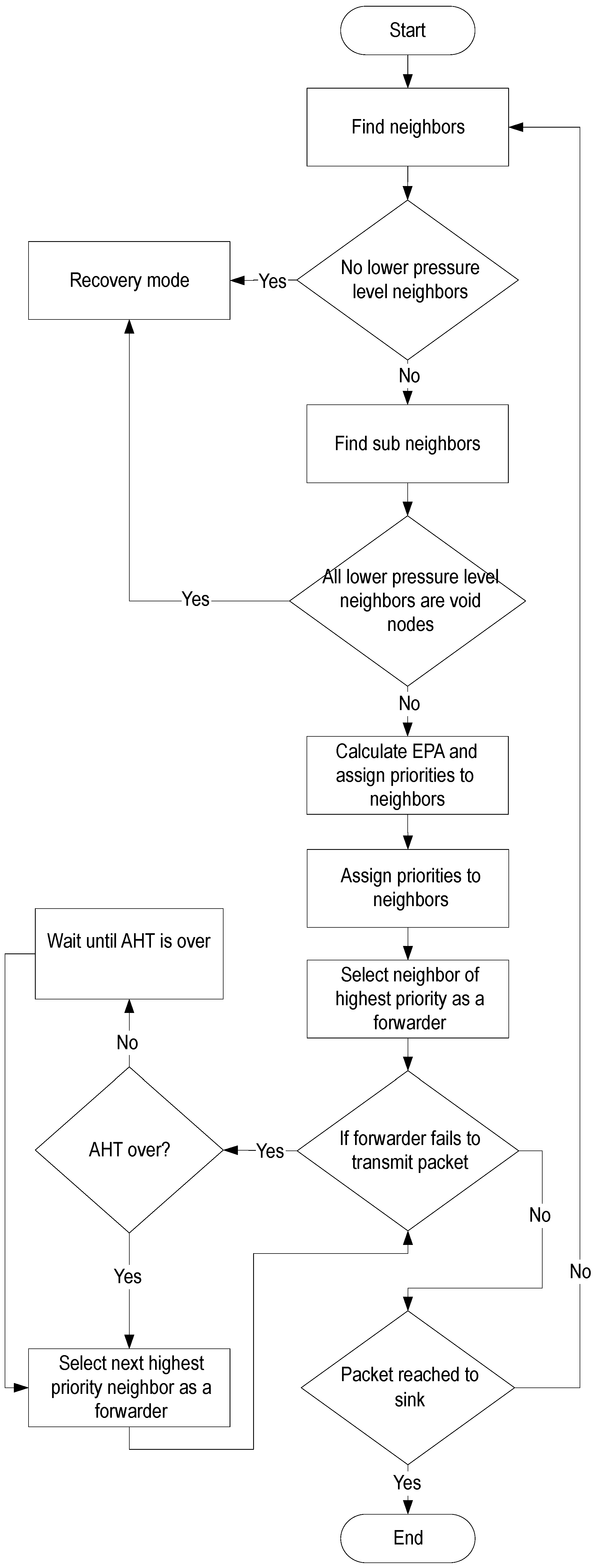
Figure 5 shows the forwarding mechanism, if a source node is itself a void node, or all lower pressure level neighbor nodes are void nodes, then the transmission shifts to recovery mode and the source node selects a higher pressure level neighbor as the next hop forwarder, as shown in
Figure 5 (recovery mode is discussed in
Section 3.2).
3.2. Recovery Mode
When a S is unable to find lower pressure node then all proposed algorithms (Improved Hydrocast, Co-Hydrocast, and Co-Improved Hydrocast) follow the same void node recovery mechanism. Let a S has to transmit a data packet and it has no neighbor node in the transmission range. It wastes a lot of energy, therefore to avoid this problem, backward transmission mechanism is adopted to find a path to the final destination. The procedure is discussed below:
Figure 6 shows case 1, when a source node
S has only void nodes as lower pressure nodes as neighbors. n1, n2 and n3 are the neighbors of
S. Both
and
have lower pressure level than S, and both are void nodes.
has higher pressure level than
S and is not a void node. So
S selects
as a forwarder and transmits the data packet to it. This backward transmission is changed to greedy forwarding as soon as a lower pressure level neighbor node is found that it is not in a void region. The backward transmission starts when there is no neighbor node which is computed according to Equation (
1) and
θ varies from 180 to 360 degree to find out a lower level neighbor that is not a void node as shown in
Figure 6. It ends when n3 finds a neighbor (Sub n1) that has a lower pressure level neighbor than itself, and is not a void node. In this way loops are avoided during the packet forwarding process.
In case 2, a S selects a higher pressure level neighbor as the next hop forwarder if it has no lower pressure level neighbors then backward transmission ends as soon as a lower pressure level neighbor is found. In this way, average throughput of the network is increased.
3.3. Role of Fixed Deployed Nodes
The mechanism of backward transmissions is avoiding the void region however, it establishes lengthy recovery paths resulting in high energy consumption due to the involvement of more number of hops as shown in
Figure 2a. To counter this problem, the strategic deployment of fixed nodes is adopted in Improved Hydrocast and Co-Improved Hydrocast for minimizing number of transmissions. The details are discussed below:
Let
n nodes be deployed at different strategic locations at sparse conditions. The objectives of strategic location is maximum coverage of the network and avoidance of void regions when the network becomes sparse. These strategically deployed nodes find sparse regions with the objective to the reduce number of transmissions for delivering a data packet as shown in
Figure 2b. The strategic locations are chosen according to Equation (
6) as follows:
where
shows the total number of sparse regions,
is a region in which
N are less and also they can not transmit data packets towards the destination.
shows the index of the sparse region with the index of number of nodes
N. The number of strategic nodes depends on the number of
. More the
, greater number of strategic nodes are required to avoid lengthy recovery paths. The nodes that are deployed at strategic locations move in sparse networks with the speed of
m/s in one scenario discussed in simulation
Section 4 and
m/s in other scenario in order to reduce the distance between the source and destination in sparse networks. The mobility of sensor nodes at strategic locations guaranteed the maximum coverage of the network. Strategic locations are computed according to Equation (
7).
denotes the strategic node number and
N shows the number of nodes from sparse region have
in their transmission range. When all members of a sparse region are in the transmission that location is picked to forward the data from the sensor nodes of a sparse.
re-establishes its data path after every 30 s with candidate nodes and transmit their sensed data after every 60 s. It moves randomly in a
, however always at lower pressure level than the void region nodes because the objective is to minimize the number of transmission for transmitting data between the sender and the receiver.
The total energy consumption is computed according to Equation (
8).
where
denotes total energy consumed in data packet transmission from the source to the destination,
shows the transmission energy,
denotes energy reception,
is used to chose minimum distance from the source to the relay and the relay to the destination,
shows the number of neighbor nodes received the data packet and
is the energy consumed in path management after every 30 s.
3.4. Channel Model
We use binary phase shift keying (BPSK) as a modulation scheme because bandwidth in UWSNs is severely limited and BPSK allows data to be carried out efficiently on acoustic channel with given bandwidth. It is calculated as given in Equation (
9) as follows:
where
denotes when
θ is 0 and
shows
.
E is energy,
T shows time period and
f is the frequency of the signal which is transmitted over a path of length
l. Total attenuation due to spreading loss and absorption co-efficient on the basis of spreading is given as follows [
25]:
It is physically impossible to design a noise free channel because whenever signal is broadcasted in the channel, it is affected by different noises like turbulence
, wind
, thermal
, and shipping
. The total noise (TN(f)) calculated as shown in Equation (
12).
where:
SNR of the received signals at the destination is calculated as follows in Equation (
17):
where
μ is the mean of the received signal with and without a noise
by Equation (
9) and
σ is the standard deviation of the signal.
denotes total number of received signals with and without noise at the destination. Mean is calculated as follows in Equation (
18):
where standard deviation is given below:
We assume the additive white gaussian noise (AWGN) model because it counters ambient noises in a better way. The channel capacity
C [
26] with bandwidth
B at time
T is given as follows:
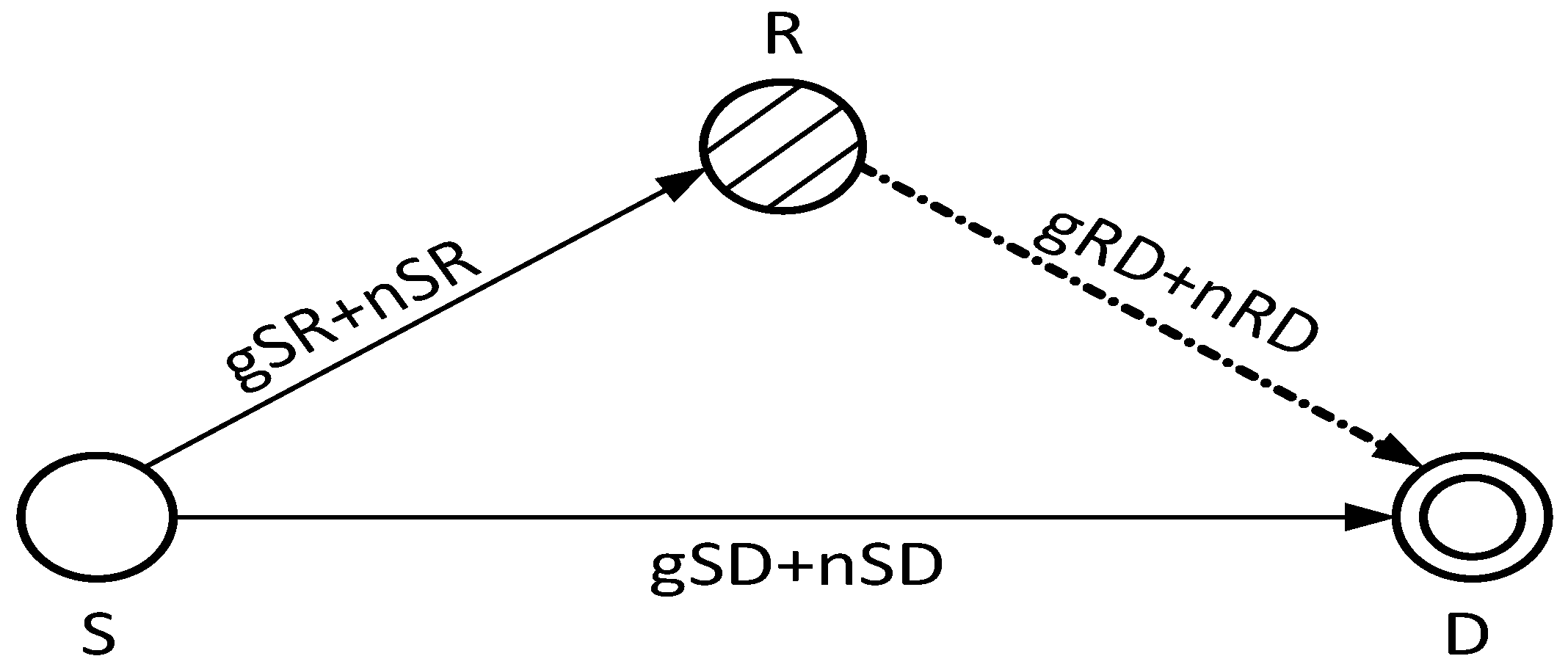
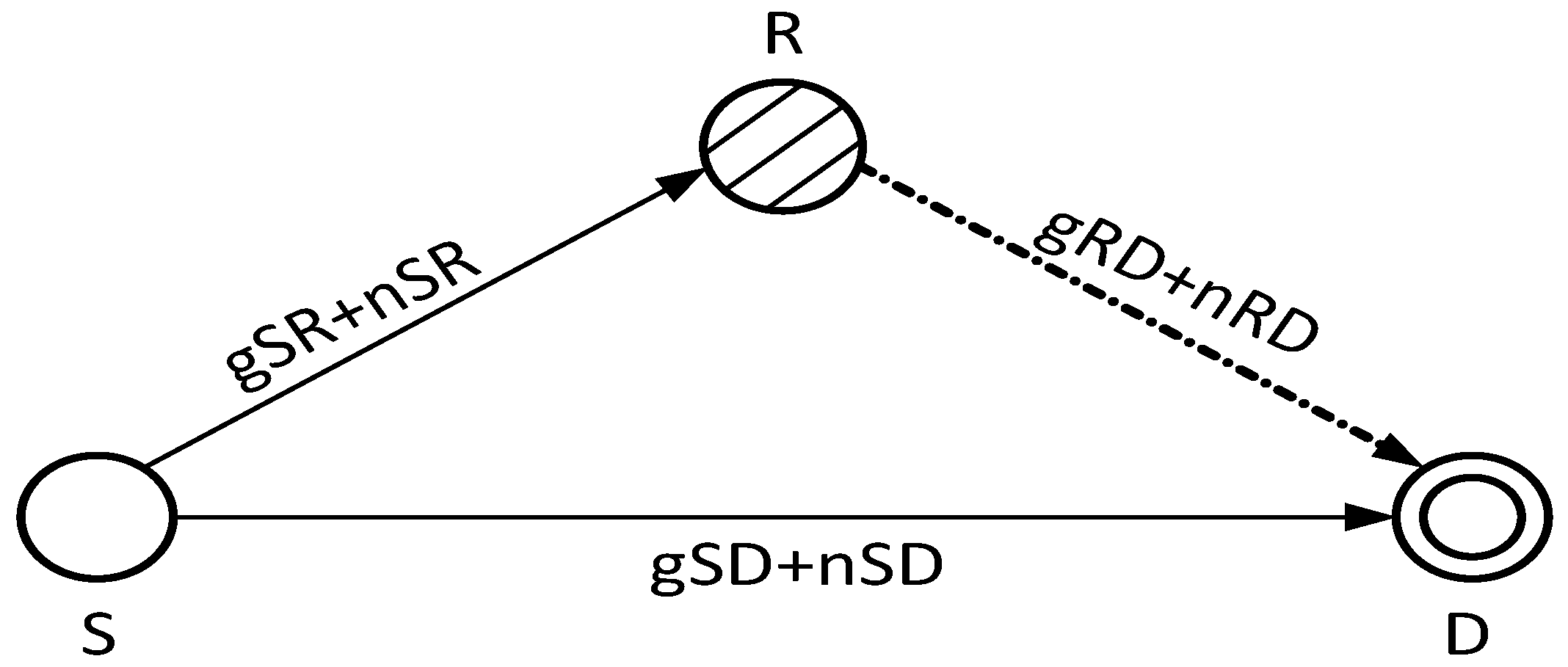
Figure 7 shows the basic cooperation technique procedure, S transmits its data packet to the destination node D directly and via a relay node R. Here, the noise and the fading are denoted by
n and
g, respectively. The relationship between the transmitted and the received signals are given in Equations (
21)–(
23) [
27]. The faded signal received at D directly from S is given as below:
Signals received at R, and from R to D are given as:
is the original signal generated and transmitted by S,
is the signal received at D directly from S,
is the received signal at R and
is the signal received at D via R.
,
and
denote channel gains over source to destination, source to relay and relay to destination links, respectively.
and
denote channel noises over source to destination and to relay links, respectively.
is the channel noise over relay to destination link.
At D, MRC technique is used to combine two different copies of the same signal, one received directly from S and the other via R. Thus the signal at D after applying MRC is given as [
28]:
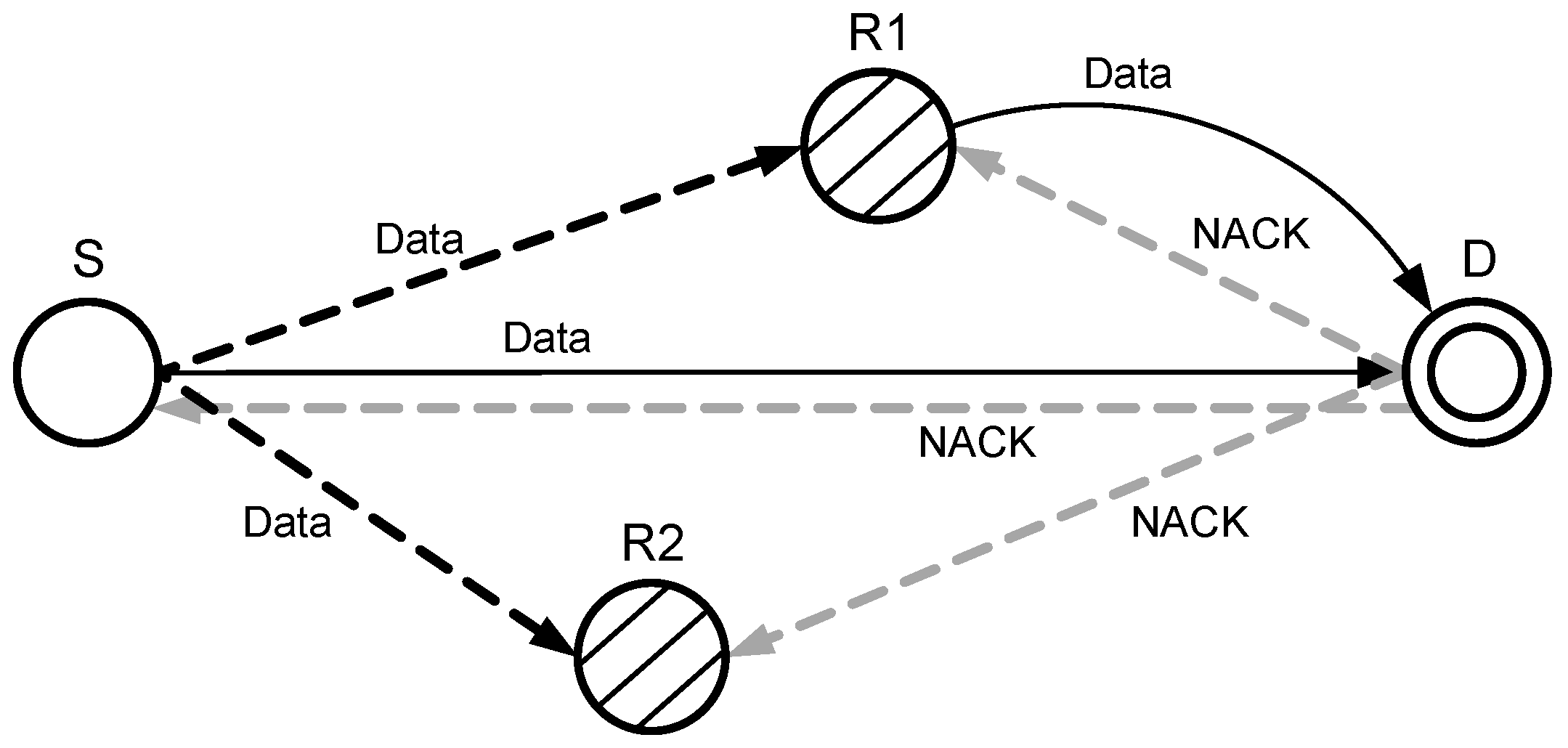
3.5. Opportunistic Cooperation
In Co-Hydrocast, fixed nodes are not involved in the minimization of the number of transmissions. However, in Co-Improved Hydrocast fixed nodes play a role in reducing the number of transmissions. The cooperation is performed in both schemes at each destination node to increase the SNR of the received signal. Details of the procedure are given below:
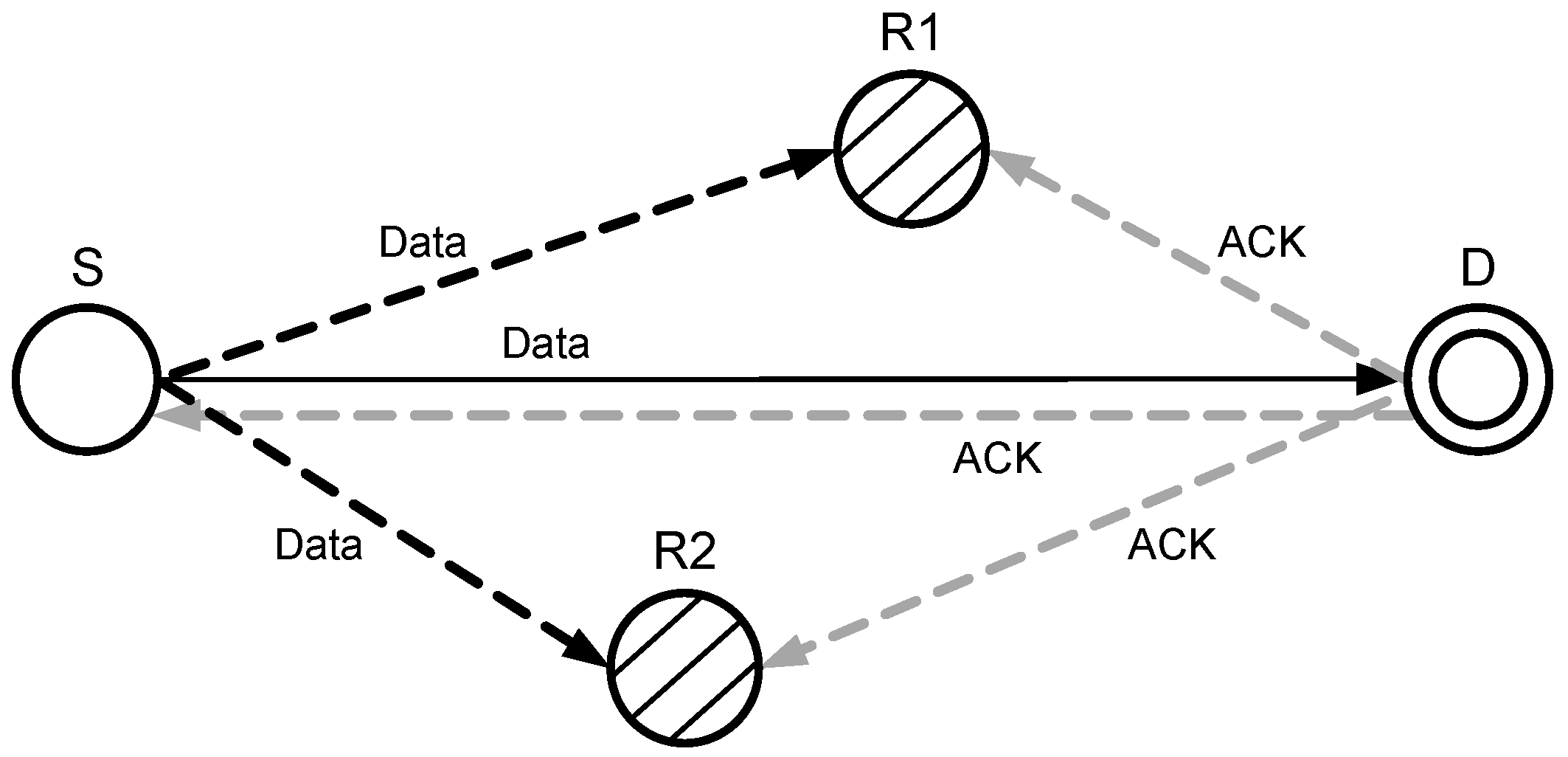
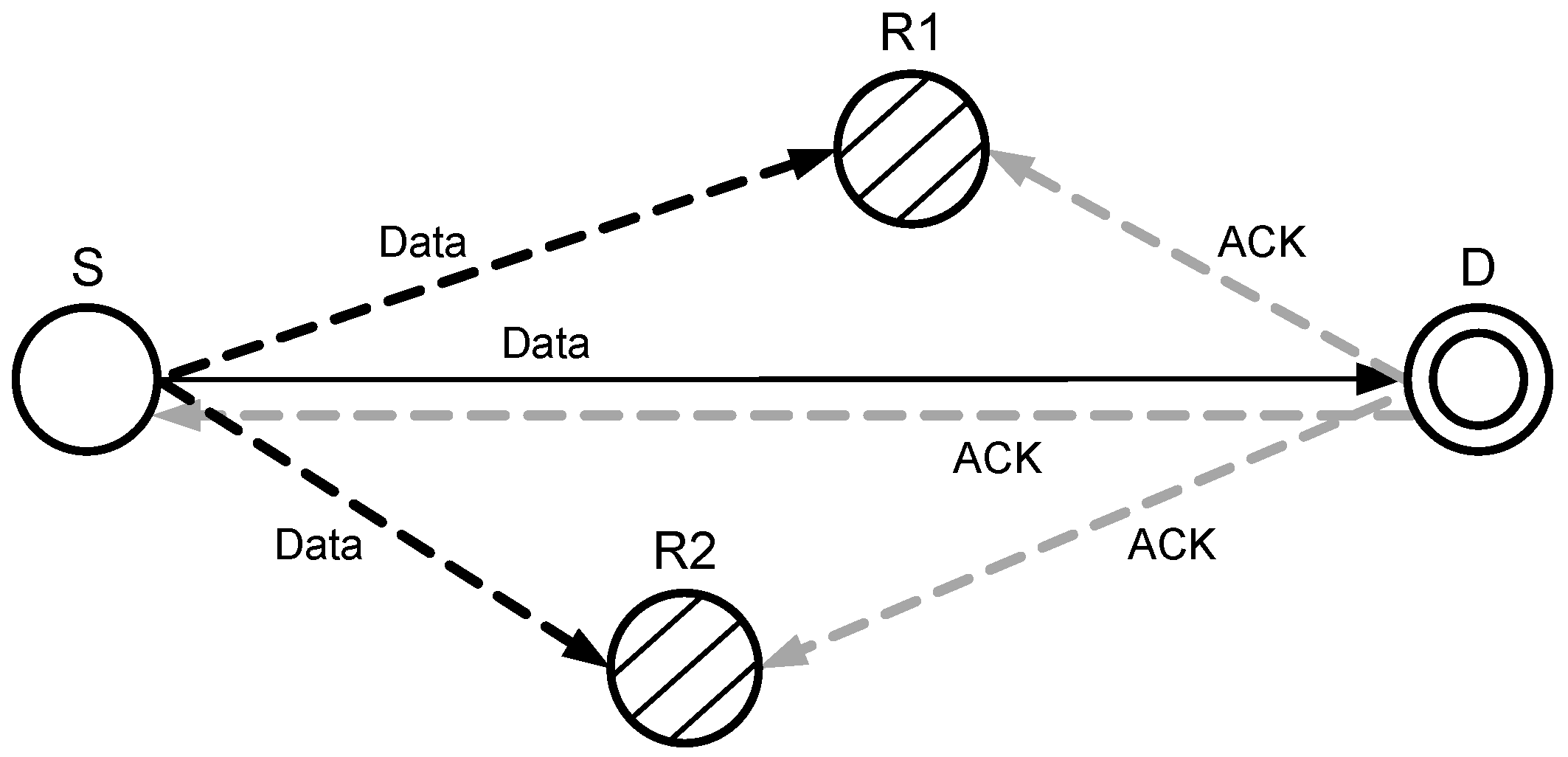
When a source node transmits a signal towards a destination node, it is overheard by other neighboring nodes, and they keep a copy of the received data packet. Destination node after receiving the source node signal, checks if SNR meets the threshold or not. If the SNR is (according to Equation (
17)) within the acceptable range, then the destination node accepts the received signal and broadcasts an acknowledgment (ACK), as shown in
Figure 8. After receiving the ACK, the relay nodes discard the stored copy of the source node signal.
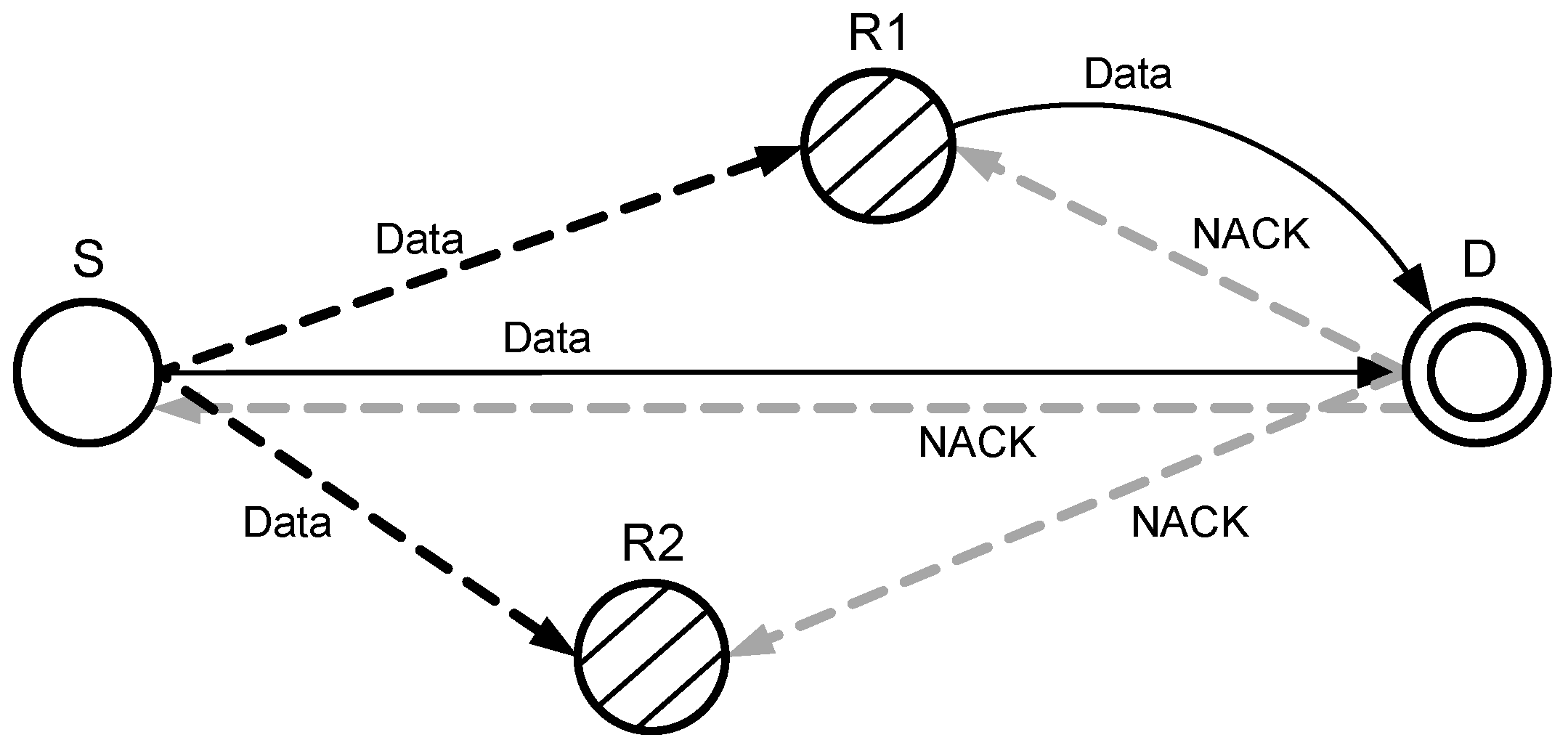
In sparse networks, the probability of data packet drop ratio and the low SNR at the destination increases.
Figure 9 shows when the SNR at the D is less than the pre-defined threshold. In that case, a negative ACK (NACK) is generated and broadcasted by D, which is received by R1 and R2. Receiving NACK, a relay node of highest priority forwards the copy of the S towards D. Both copies of the signal that are received directly from a source node and via relay node are combined at the destination node by MRC technique to avoid the re-transmission.
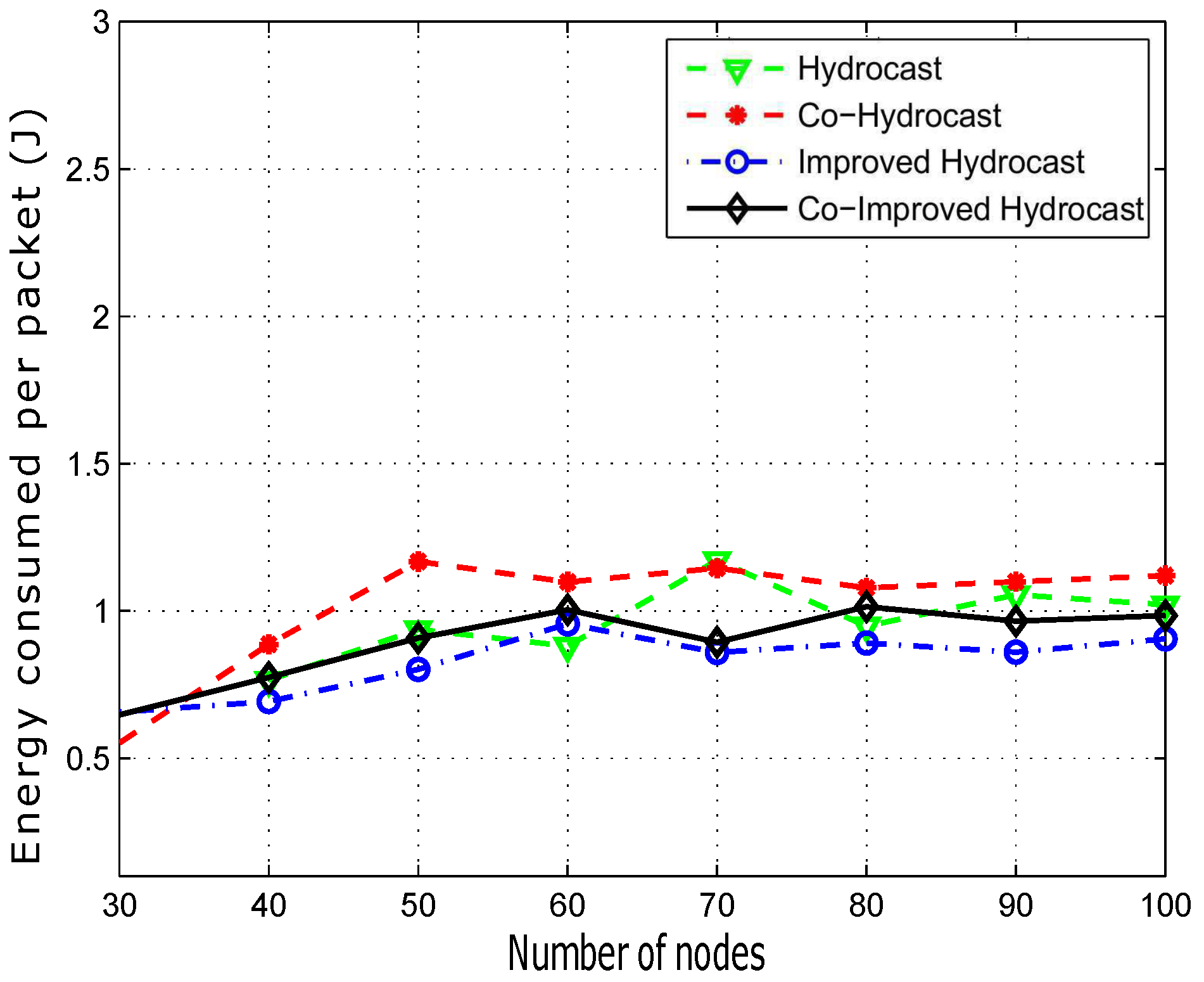
3.6. Minimization of Energy Consumption
In order to design an energy efficient routing protocol, linear programming is one of the most commonly used mathematical techniques. It begins with a problem formulation of an objective function that has some linear constraints. In this subsection, we will discuss how linear programming based model reduces the energy consumption resulting in maximum network lifetime.
In our proposed schemes, sensor nodes consume their energy in data communication between the source and the destination while receiving and transmitting a data packet. Therefore, based on this assumption, we have formulated the objective function that is given in Equation (
25).
where
is the energy consumed by the sensor node during the data communication that is computed as given in Equation (
26).
is a maximum transmission energy over distance D,
shows a receiving energy over D. These are calculated as given in Equations (
27) and (
28).
where
denotes data packet size,
is a data rate,
represents a transmission power and
is a receiving power.
such as,
According to Equation (
25), our objective is to minimize the energy consumption in each round. Such that the summation of all rounds resulting in high network lifetime. Equation (
26) gives the explanation about the type of energy consumed in each round and Equations (
27) and (
28) explain how the transmission and the receiving energy in calculated at each hop between the source and the destination. Constraints defined in Equations (
29) and (
30) ensure that energy must be within these constraints to receive and transmit a data packet in any round successfully. Equation (
31) constraints ensure that each packet received at the destination must satisfy the predefined SNR threshold otherwise it will perform the cooperation to enhance the SNR to increase the reliability of the data packet. Similarly, Equations (
32) and (
33) are used to restrict the transmission of data communication over too long or too small distances in order to keep data packets within the transmission range of a node and reduce the number of hops for conserving nodes energy for a long time. Suppose the total available energy is
, that is computed as given below:
denotes the initial energy of a single nod at the time of deployment and
N shows the number of nodes in the network.
The total
after round (r) is calculated as shown in Equation (
35).
Let D be divided in to K number of levels then the minimum energy consumption over K be computed as given in Equations (
36) and (
37).
Here, it can be noted that the energy utilization during data transmission and data collection over D provides the encouraging results in response to the objective function given in Equation (
25).
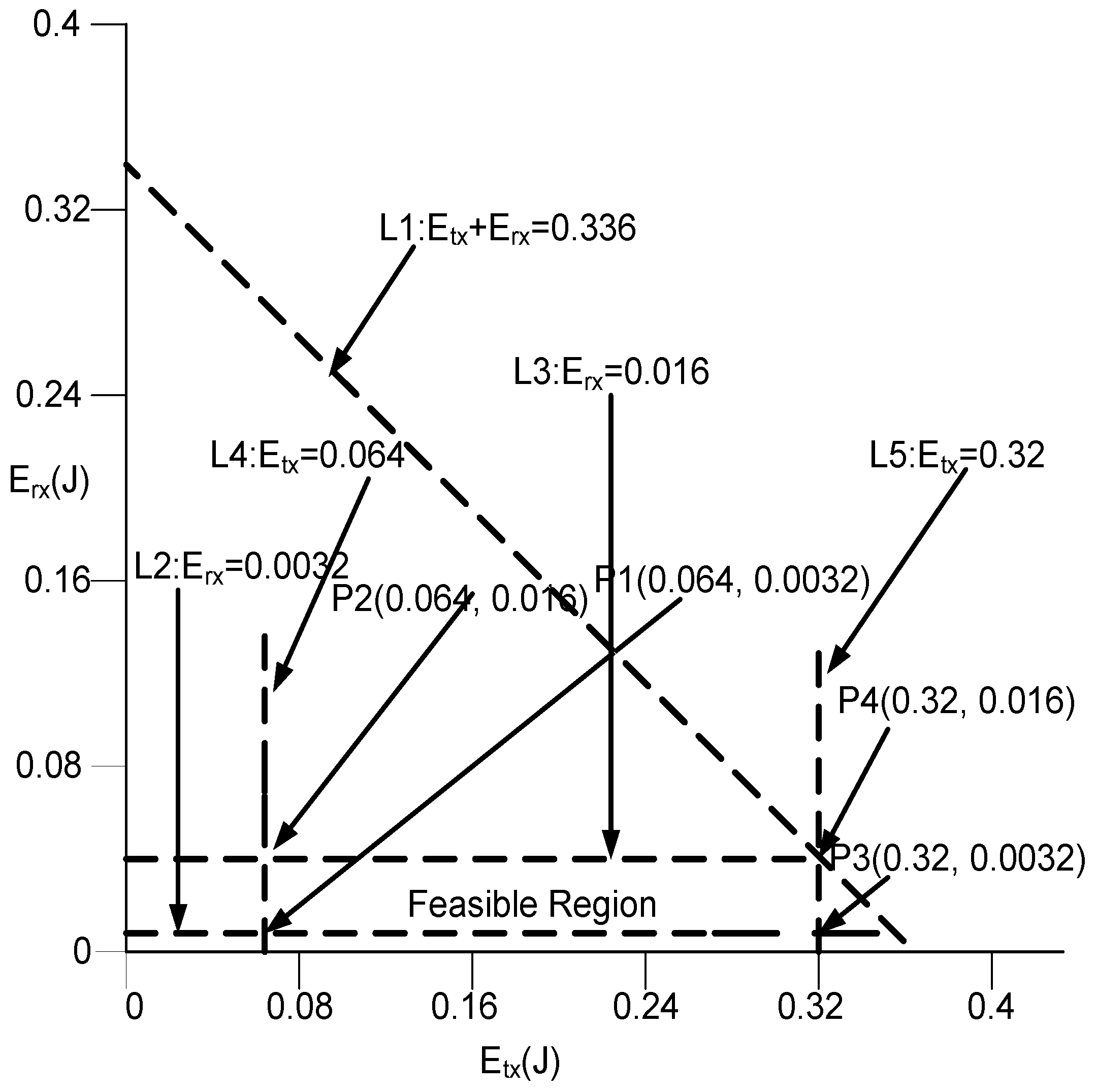
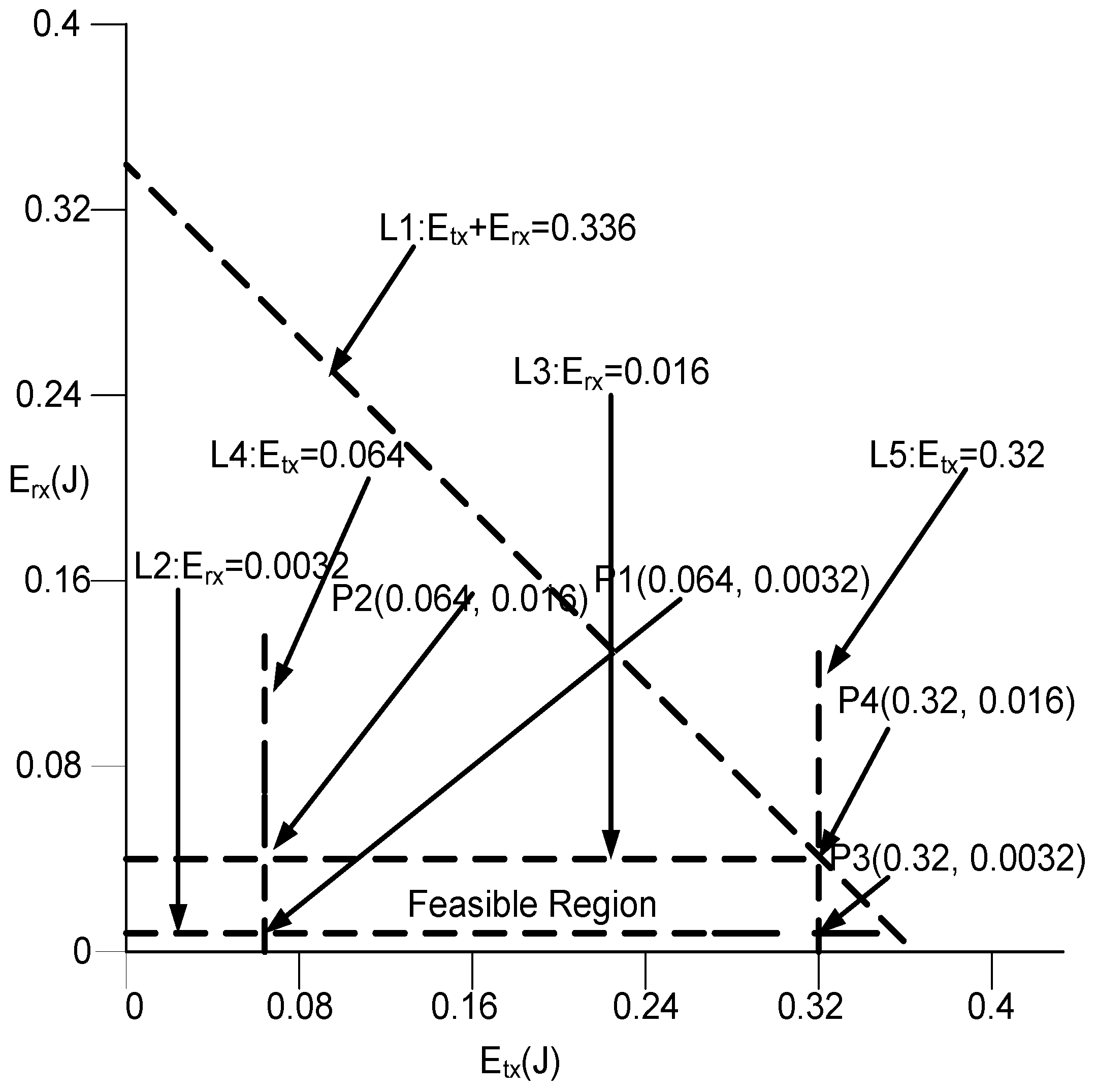
Graphical analysis: Let we have a scenario in which transmission range (250 m) be divided in to
K levels i.e.,
, and 5. Where
,
,
Kbps,
, and
is
(W) and
W, respectively. From these values, using Equation (
27)
is 0.32 J for
and from Equation (
36),
J for
. By using Equation (
28),
J and from Equation (
37),
J for
and
, respectively. Equations (
26)–(
28), could be denoted as given in Equations (
38)–(
40).
By keeping in mind, bounds given by Equations (
38)–(
40);
Figure 10 shows the intersection of lines (L1, L2, L3, L4, and L5) that contains the set of all feasible solutions. This region known as feasible region. The solution of each point (P) is valid in this region. Now, we test every vertex depicted in
Figure 10 as:
at : J,
at : J,
at : J,
and at : J.
Therefore, it is proved that all calculated solutions are valid. The energy consumption will be minimum with in the given premises of the feasible region resulting in high network lifetime.
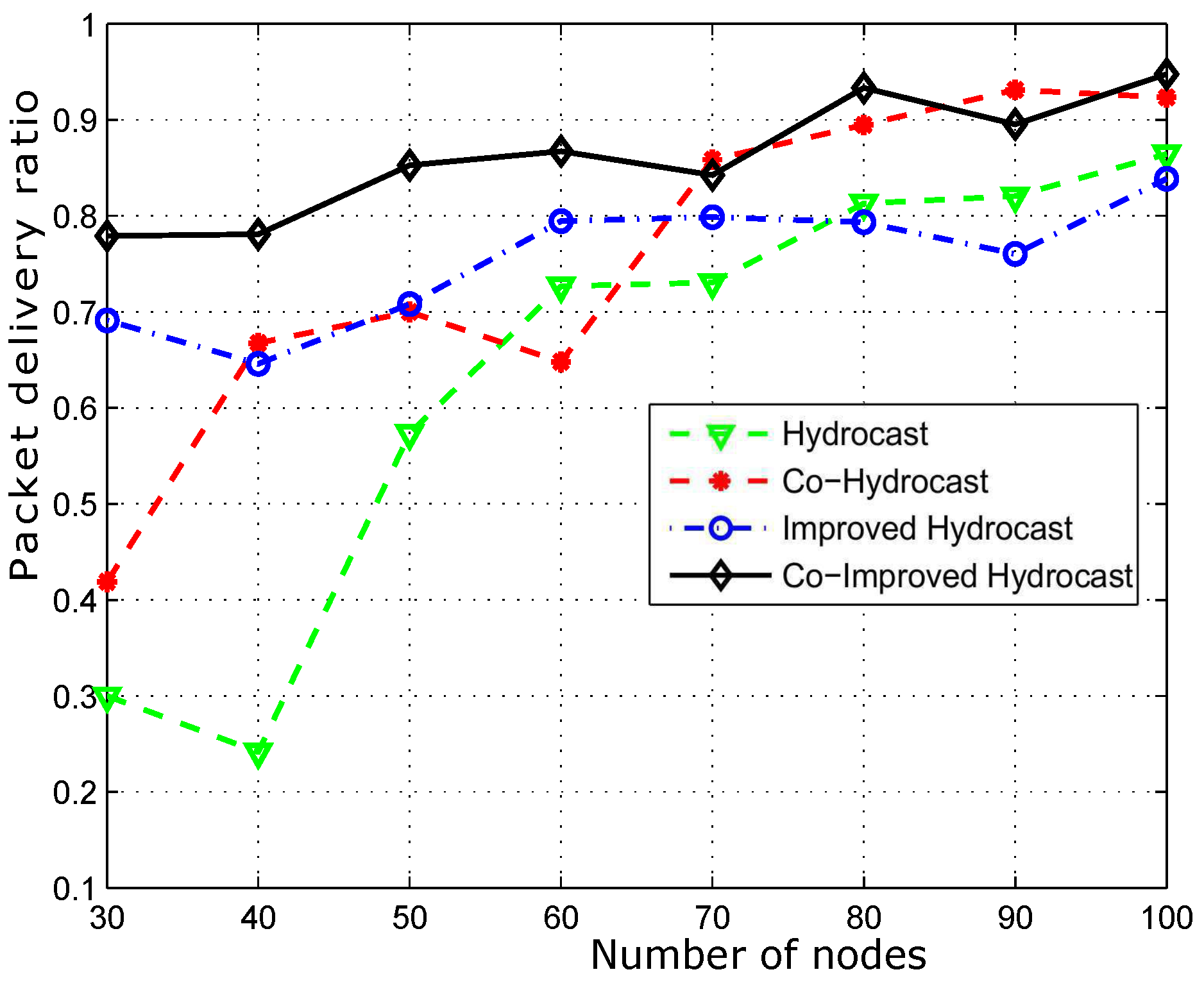
3.7. Throughput Maximization
In this section, we have formulated an objective function to maximize the network throughput, the purpose of this model is to show that the minimization of energy consumption did not compromise the throughput of the network in our proposed schemes is comparatively still better than the compared existing scheme (Hydrocast).
In our proposed schemes (Co-Hydrocast, improved-Hydrocast, and Co-improved Hydrocast), data packets are received via cooperative routing or with out cooperation. The network throughput is, the total number of data packets received successfully at the sink. The SNR check is performed at each link to ensure that data packets arrived the destination are within the SNR, if the data packet received at the destination have SNR within the predefined threshold then the data packet is considered in throughput. Therefore, based on these considerations, an objective function is formulated that is given in Equation (
41).
where TP(r) denotes total number of data packets received in r (rounds) and TP is computed as given in Equation (
42). It shows number of packets (P) those meet the
.
Equation (
43) shows that a packet is only counted as a successful transmission when SNR of a signal is 1, if the received signal SNR is not within the threshold value then
.
such that;
Our main objective is to maximize the network throughput (that is Equation (
41)) by meeting all the given constraints. Equations (
42) and (
43) ensures that all packets received at the destination are meeting the predefined SNR threshold (
) will be accounted as a successful data packet. Constraints defined in Equations (
44) and (
45), make that
should not exceed the maximum and the minimum limits. These restrictions are set to avoid the wastage of energy. SNR constraint is defined in Equation (
46) to ensure the reception of error free packets at the sink and to conserve the energy and avoid a packet loss over long distances and minimize the number of hops for maximizing network lifetime and reducing propagation delay (Equations (
47) and (
48) are defined). Similarly, to avoid buffer overflow of sensor nodes, two constraints Equation (
49) and Equation (
50) are used to allocate a desired bandwidth as per requirement.
Let suppose, the total available bandwidth (KHz) be
, such that,
where
and
denote cooperative nodes bandwidth and non cooperative nodes bandwidth, respectively.
is computed as follows:
is the total available bandwidth for a cooperative node i,
number of nodes present in its transmission range for the relay cooperation,
represents the number of times the cooperation is performed,
is the total available bandwidth for non cooperative nodes, and
is a probability of relay node existence.
Here, it can be noted that the bandwidth allocation during data collection provides the encouraging results in the response to the objective function given in Equation (
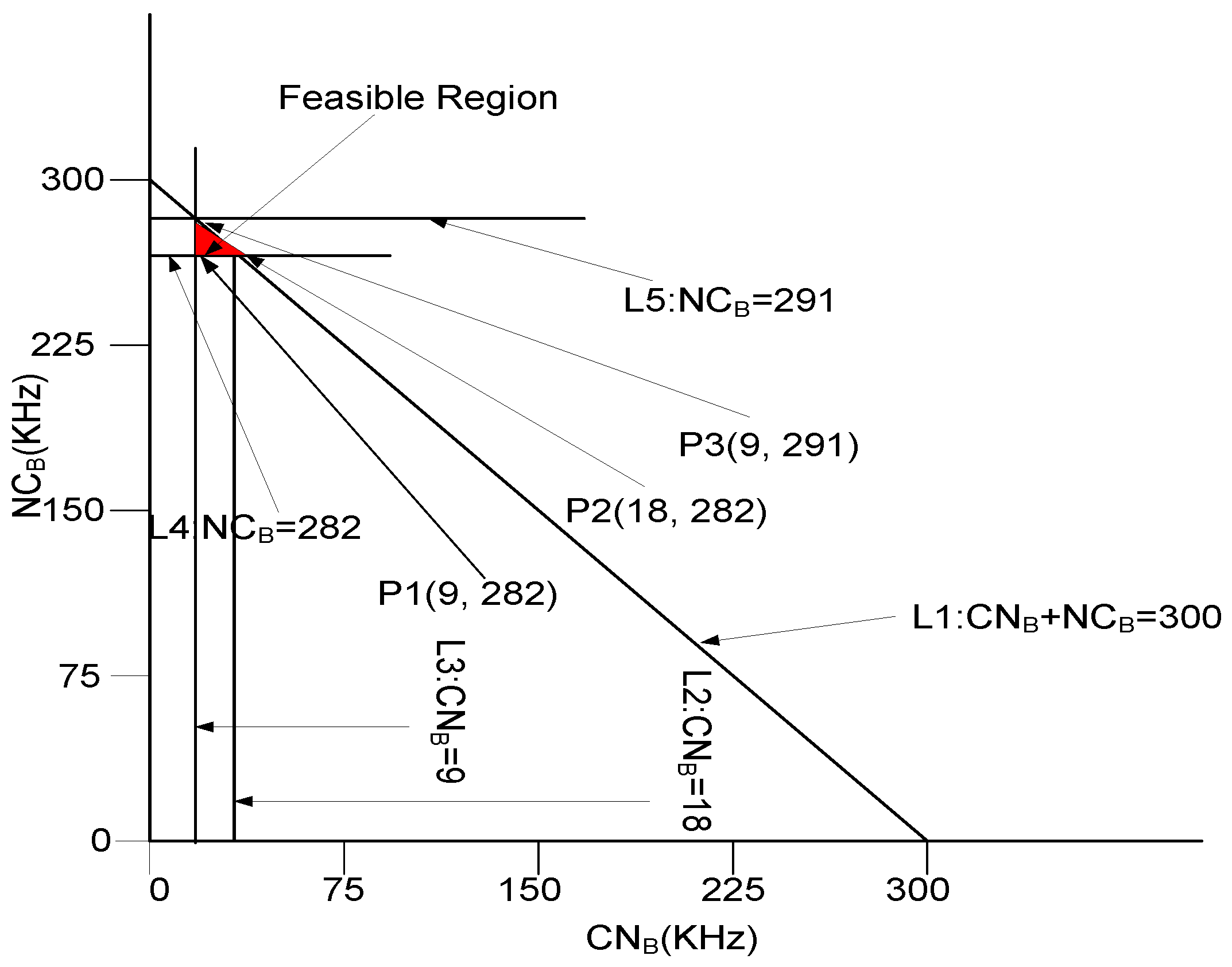
25).
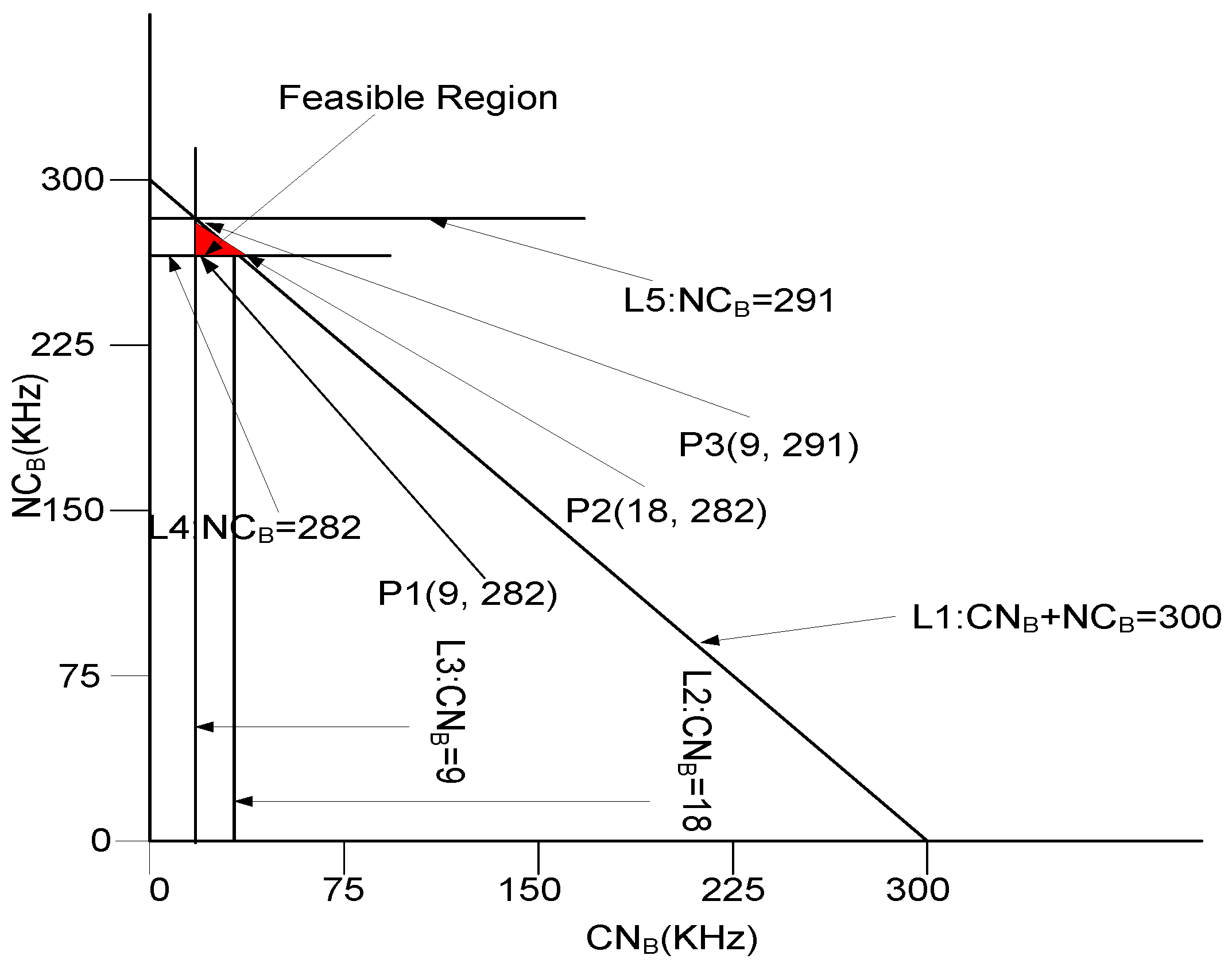
Graphical analysis: Let suppose, we have a scenario in which
KHz to 300 KHz,
,
, and
. We have calculated the value of
by using the values of
N,
,
, and
.
KHz when
and 18 KHz at
. Similarly,
is computed by using Equation (
54). Equations (
51), (
53), and (
54), could be denoted as given in Equations (
55)–(
57) (with units KHz).
The bounds provided by Equations (
55)–(
57) are shown in
Figure 11. The intersection of lines L1, L2, L3, L4, and L5 shows the bounded region of all feasible solutions. Each point in region gives a valid solution and each vertex of feasible region is tested that depicted by
Figure 11.
at : KHz,
at : KHz, and
at : KHz,
Hence, it is proved that all points are valid in the depicted feasible region. Therefore, a desired bandwidth can be easily allocated at any point within the depicted premises of the feasible region as per requirement.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}