
Embedded Spherical Localization for Micro Underwater Vehicles Based on Attenuation of Electro-Magnetic Carrier Signals


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
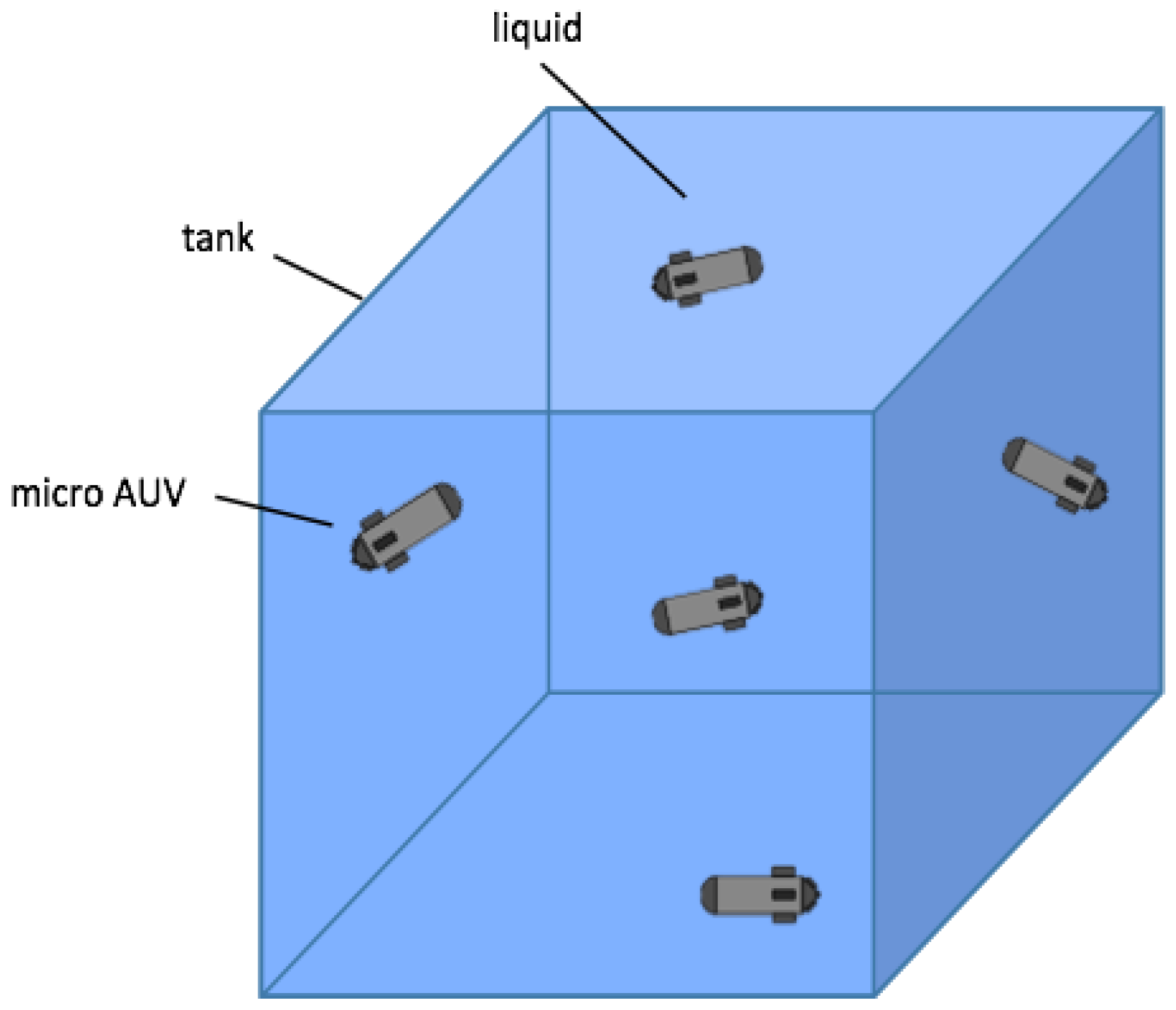
1.1. Challenges in Underwater Localization in Confined Tanks
1.2. Related Work
1.3. Contributions and Outline
2. Theoretical Background for Spherical Localization Based on Attenuation of EM Waves
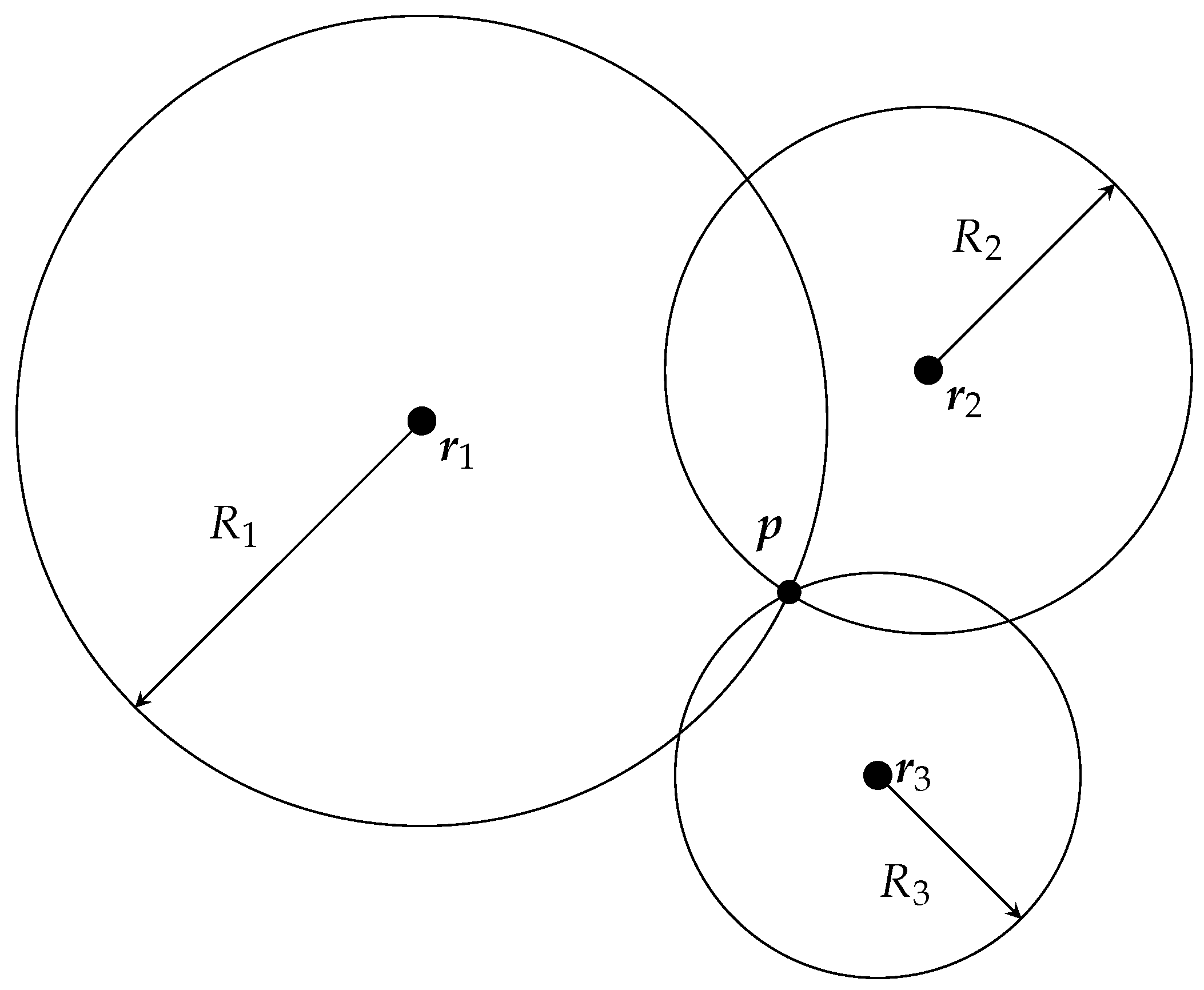
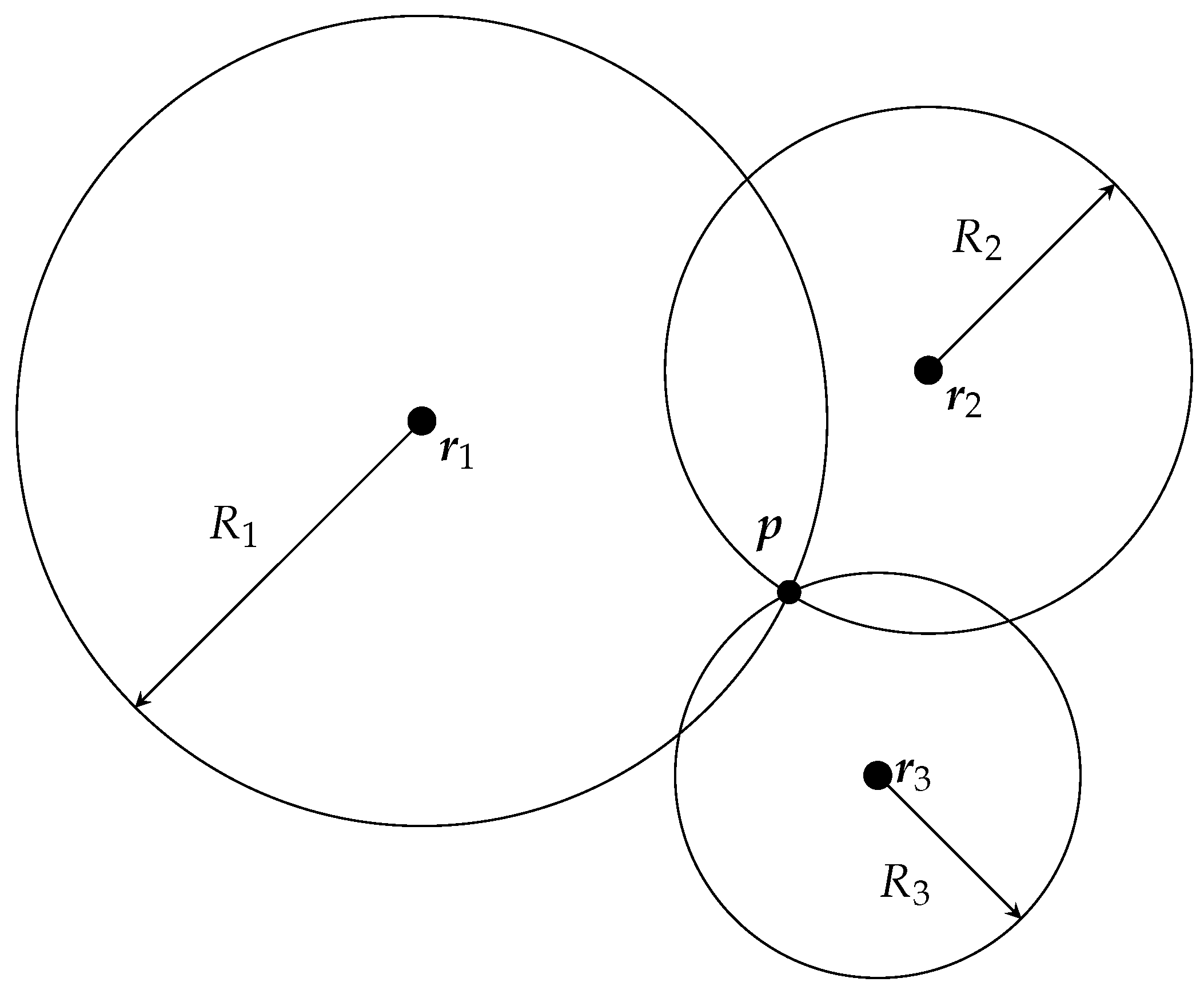
2.1. Spherical Localization
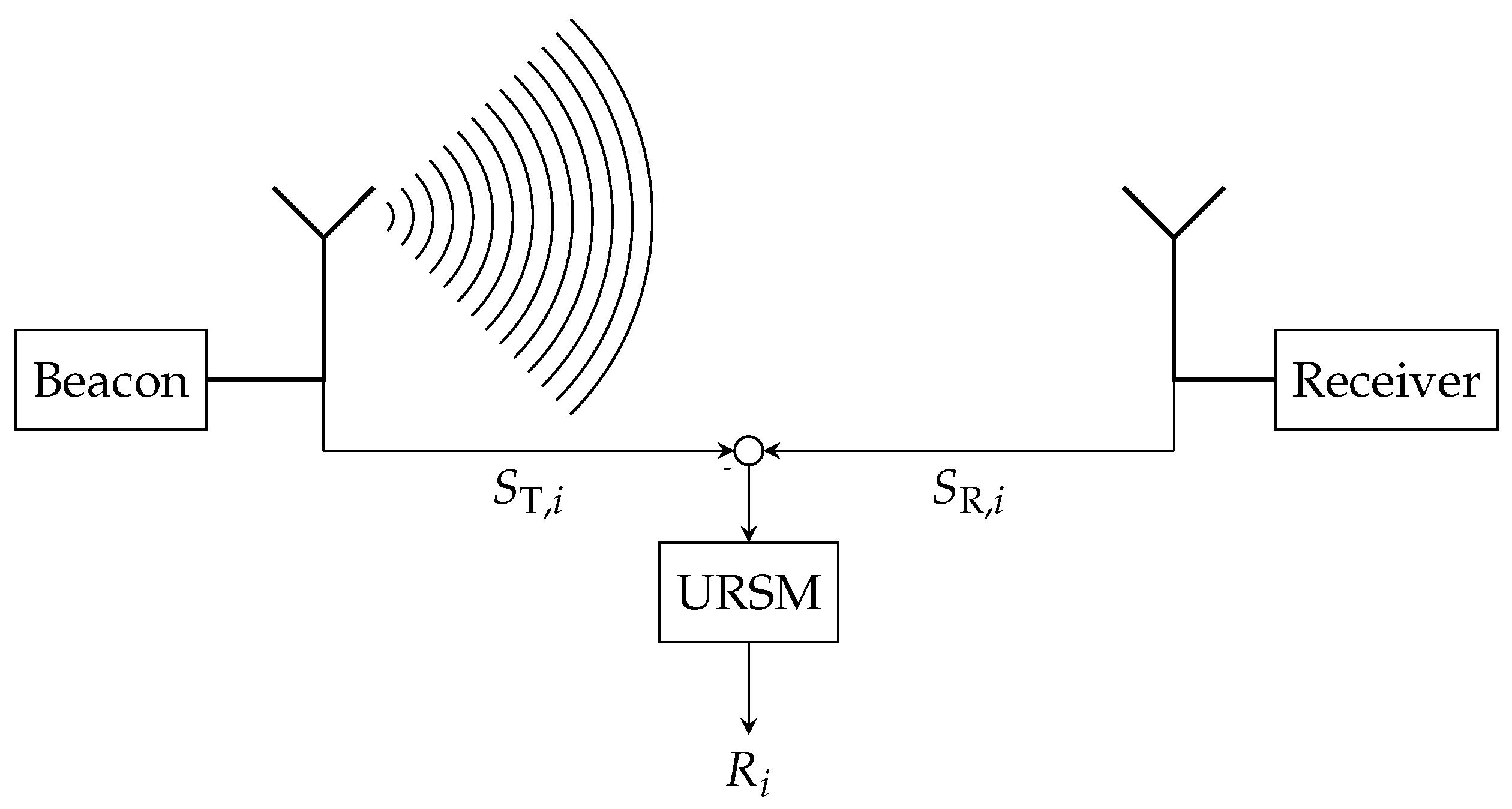
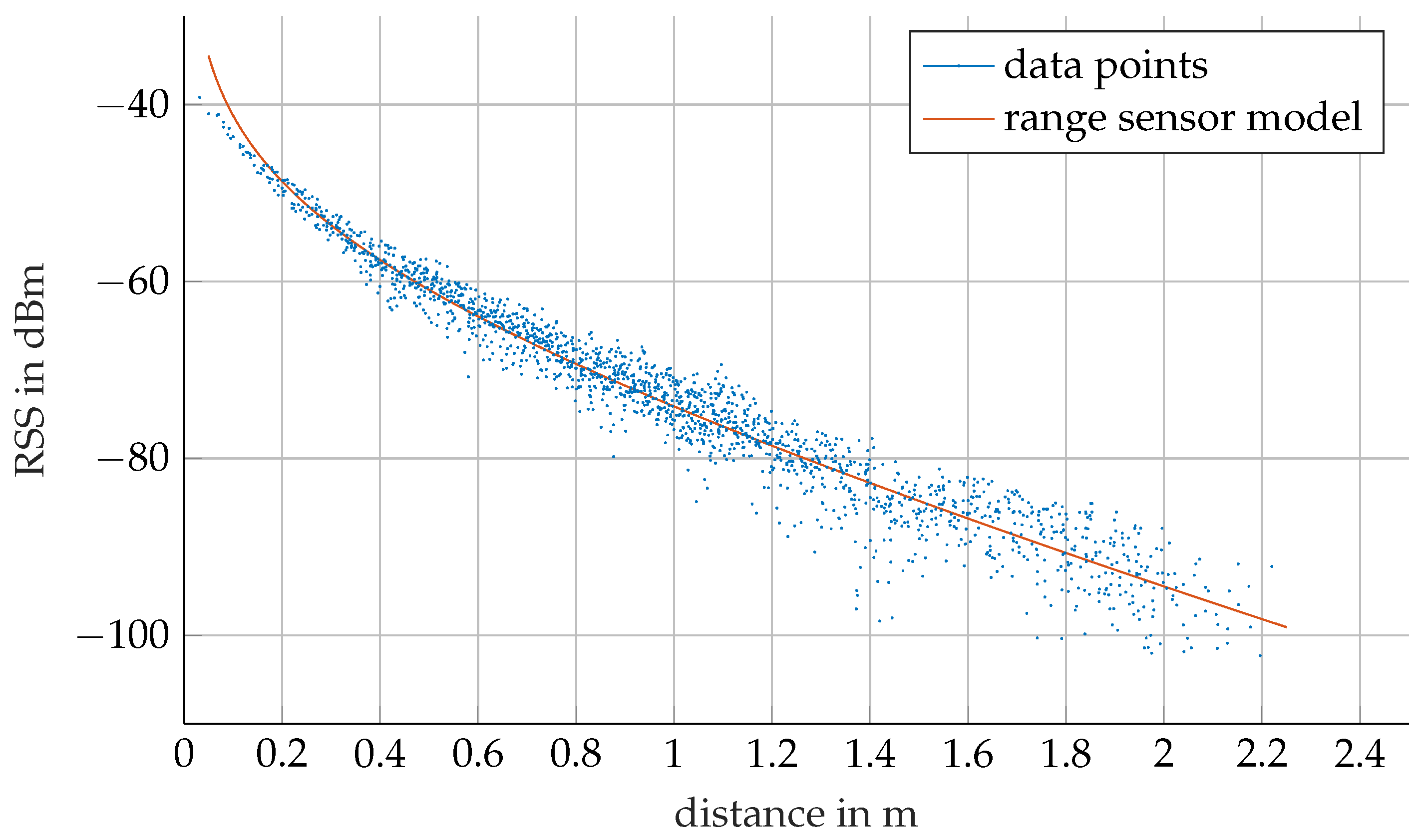
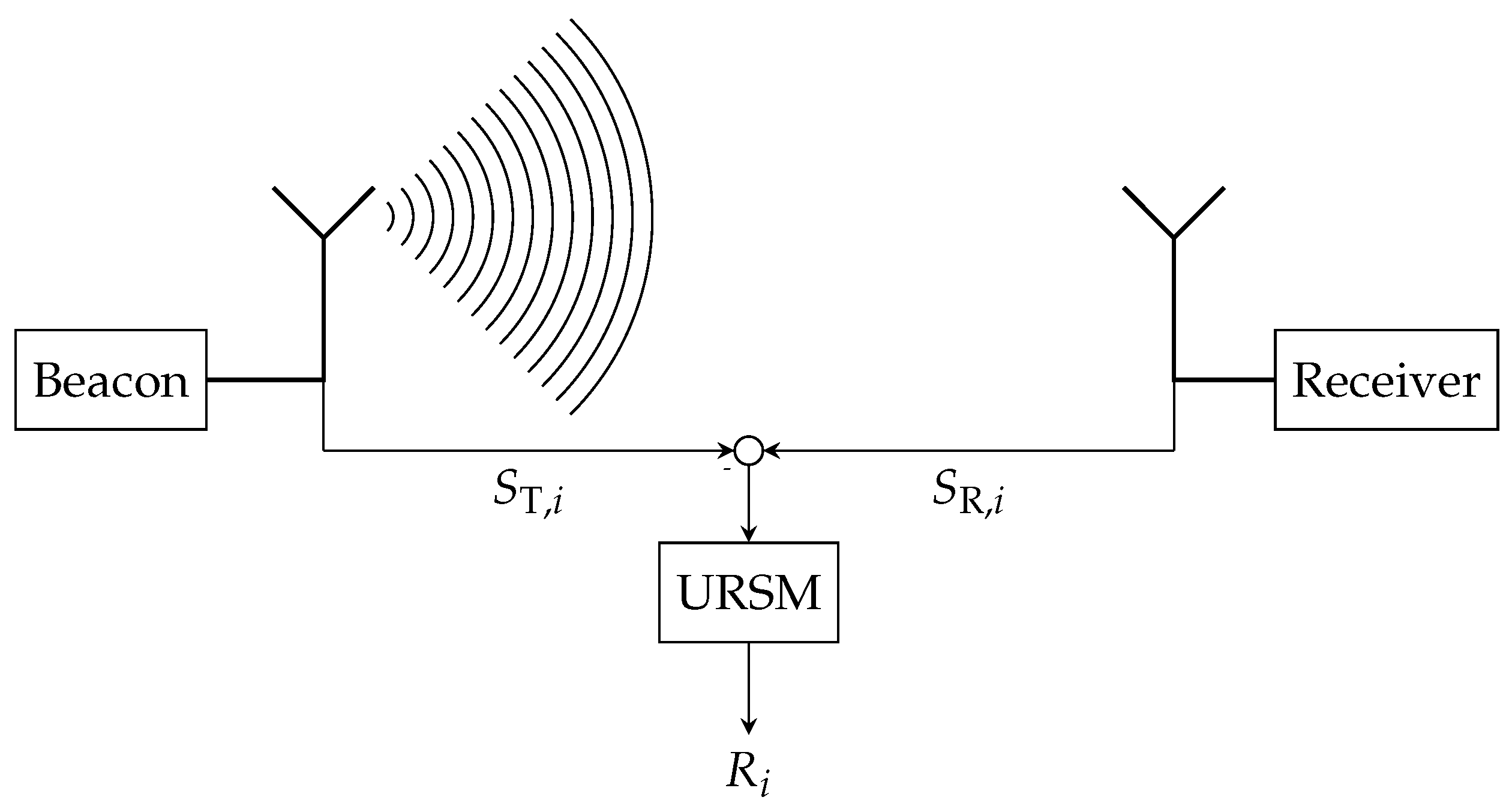
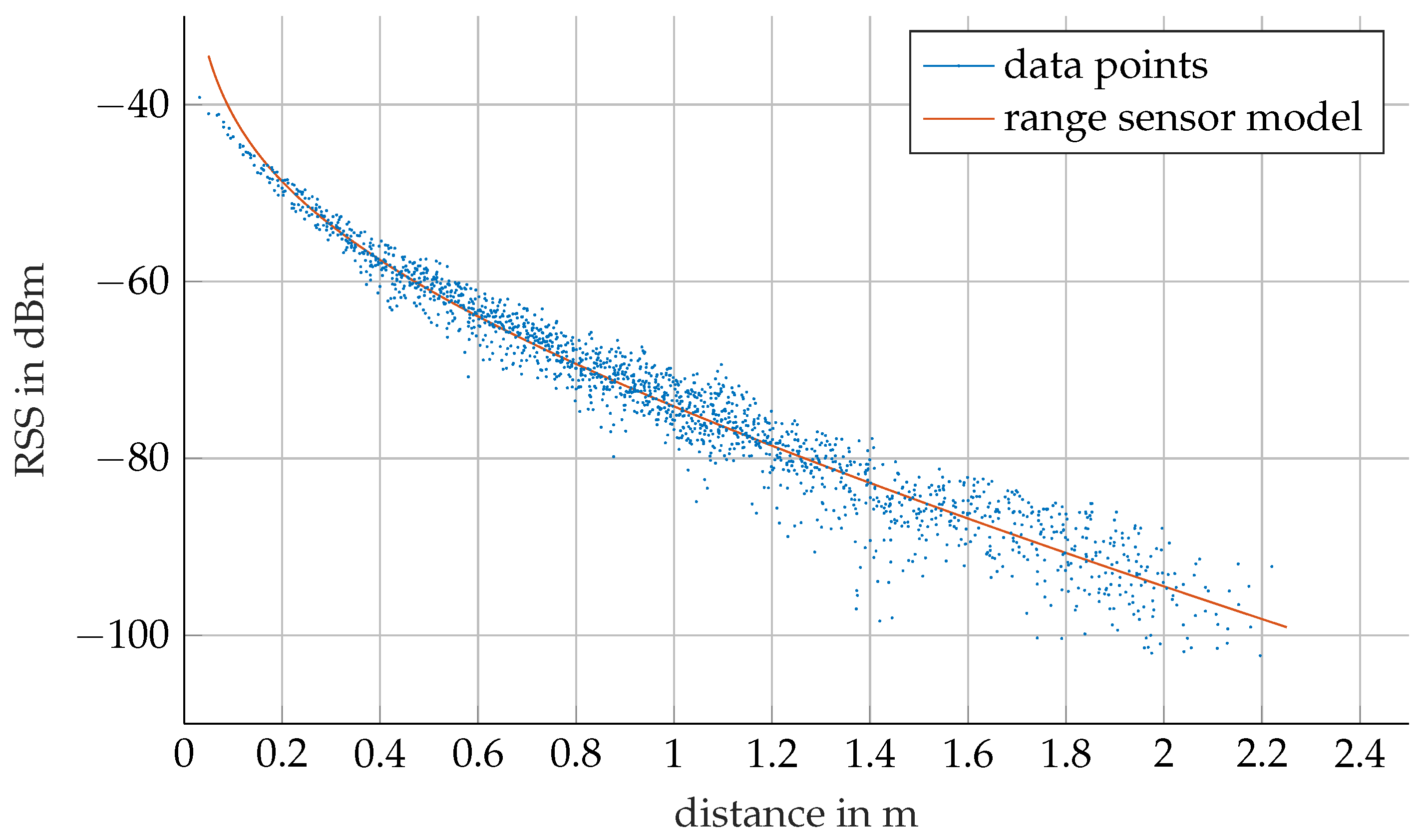
2.2. Underwater Range Sensor Model
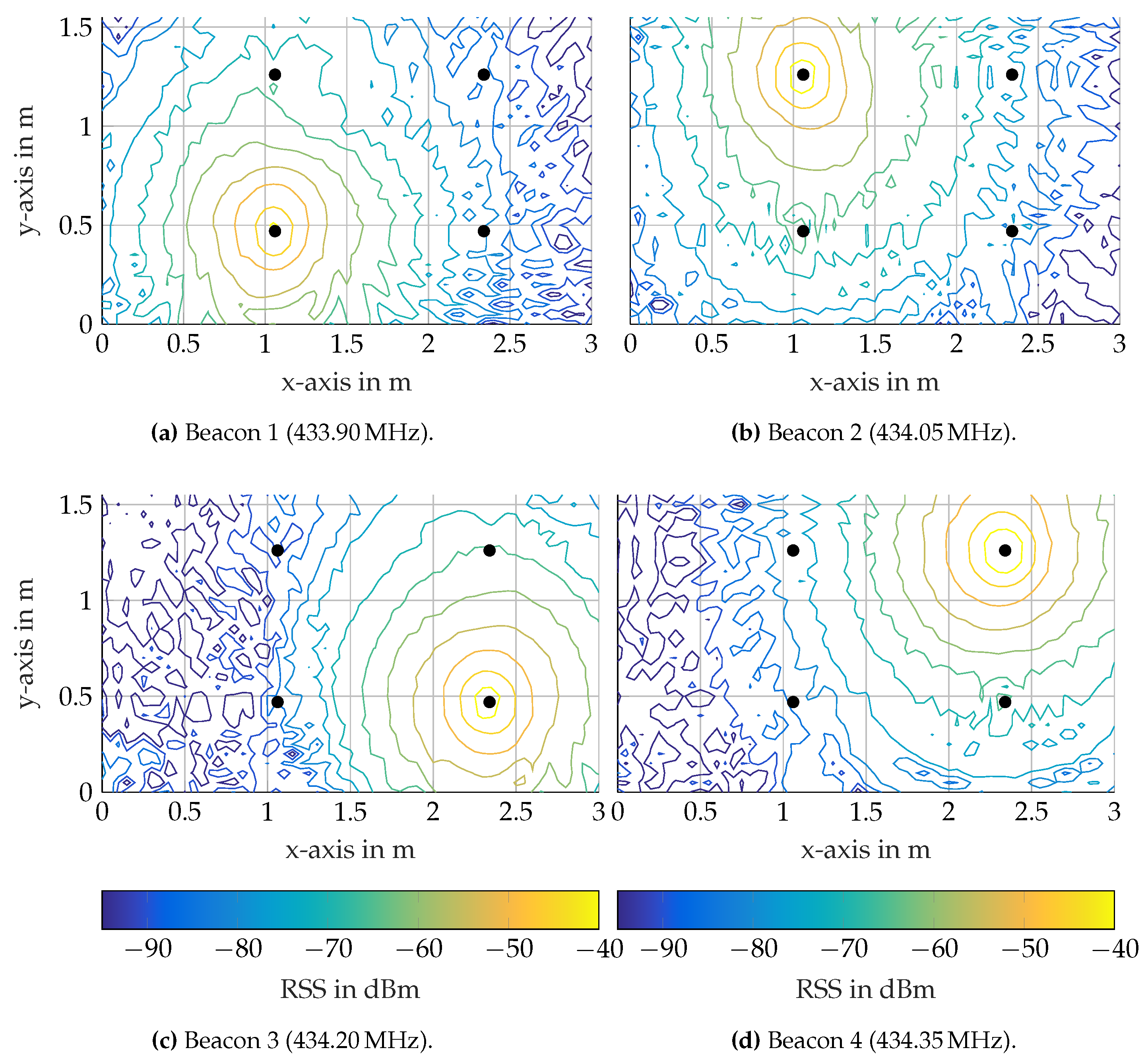
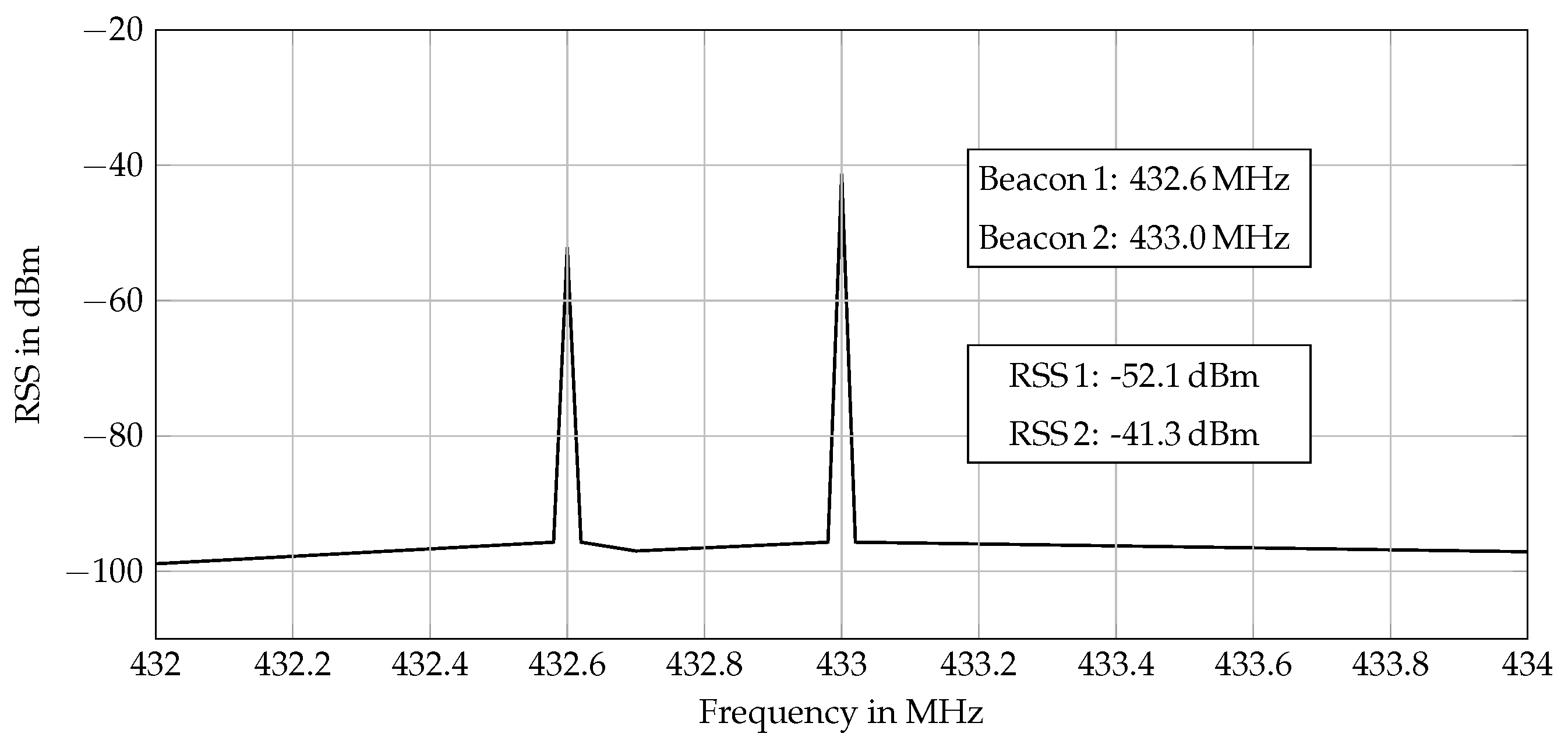
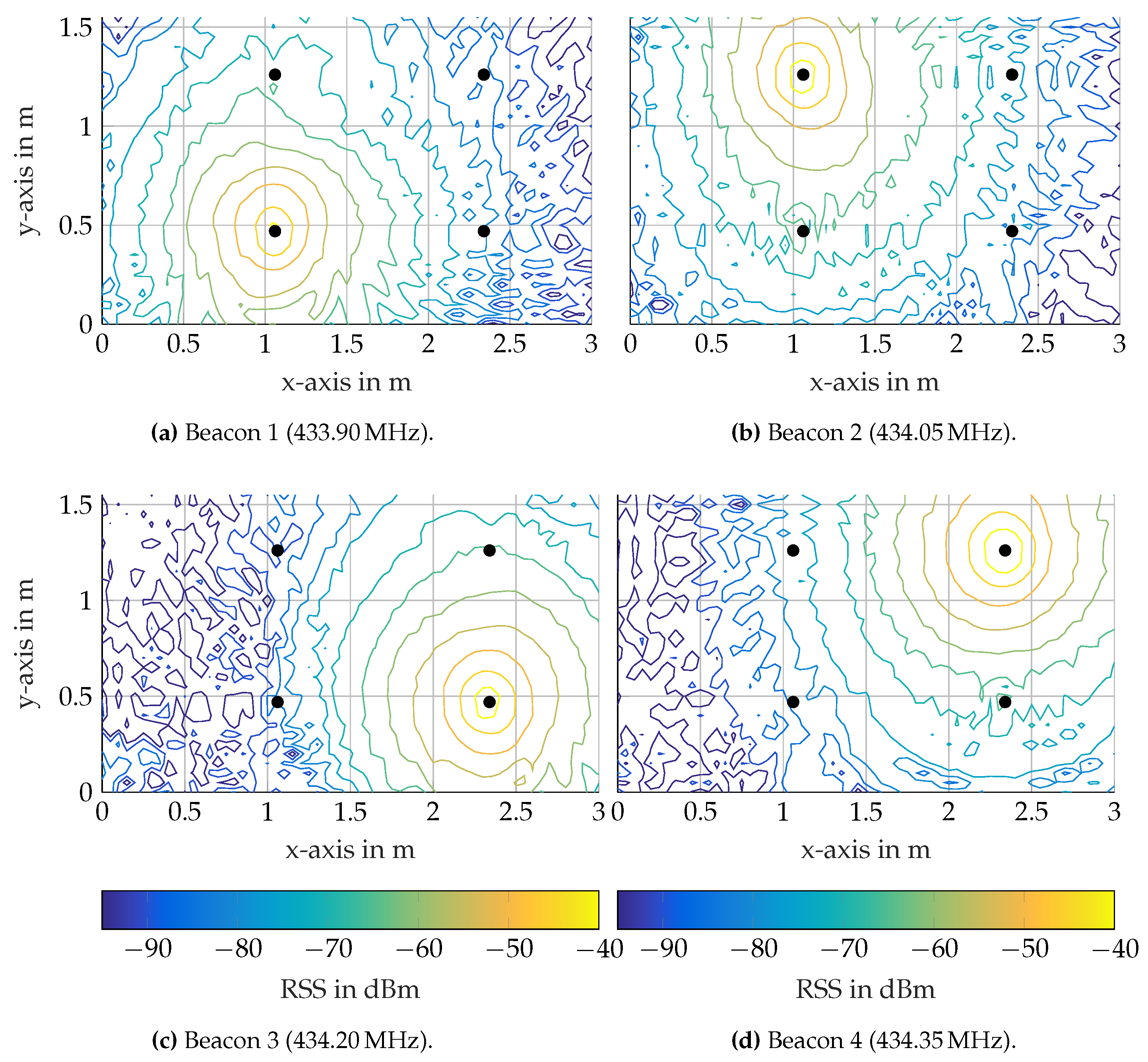
2.3. Signal Identification Using Channel Allocation
2.4. Cramér–Rao Lower Bound
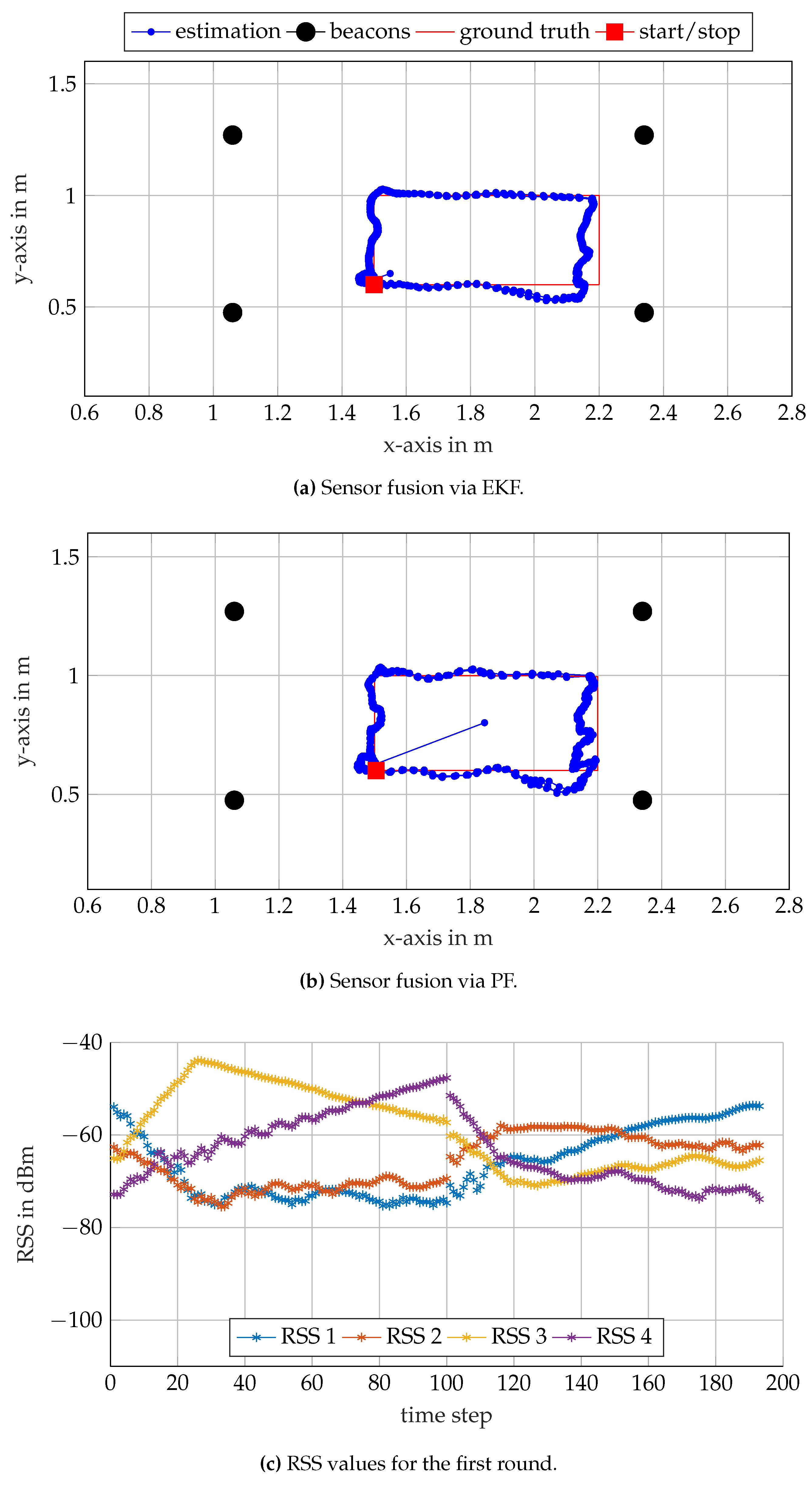
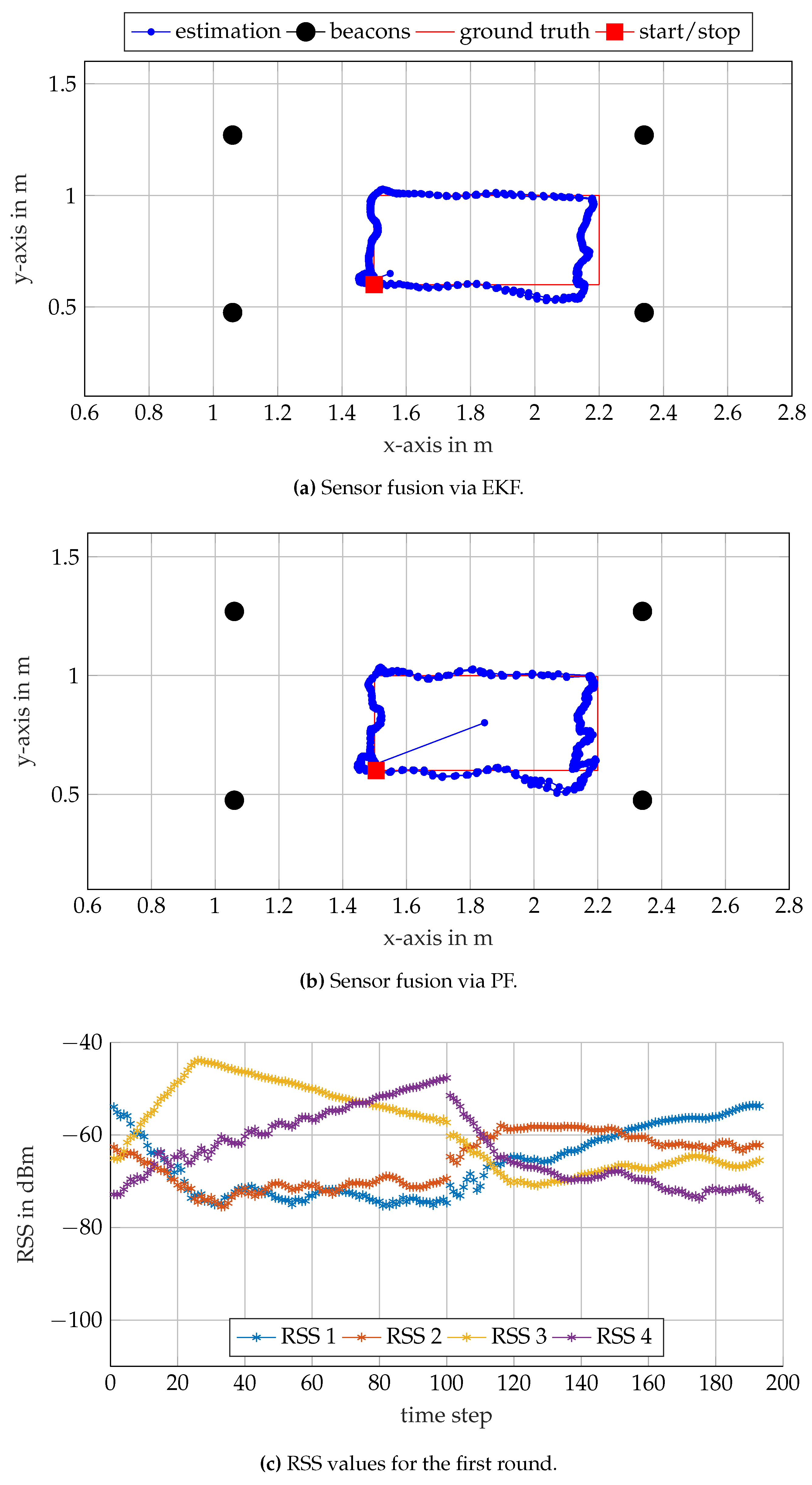
2.5. Extended Kalman Filtering
2.6. Particle Filtering
3. Hardware Architecture
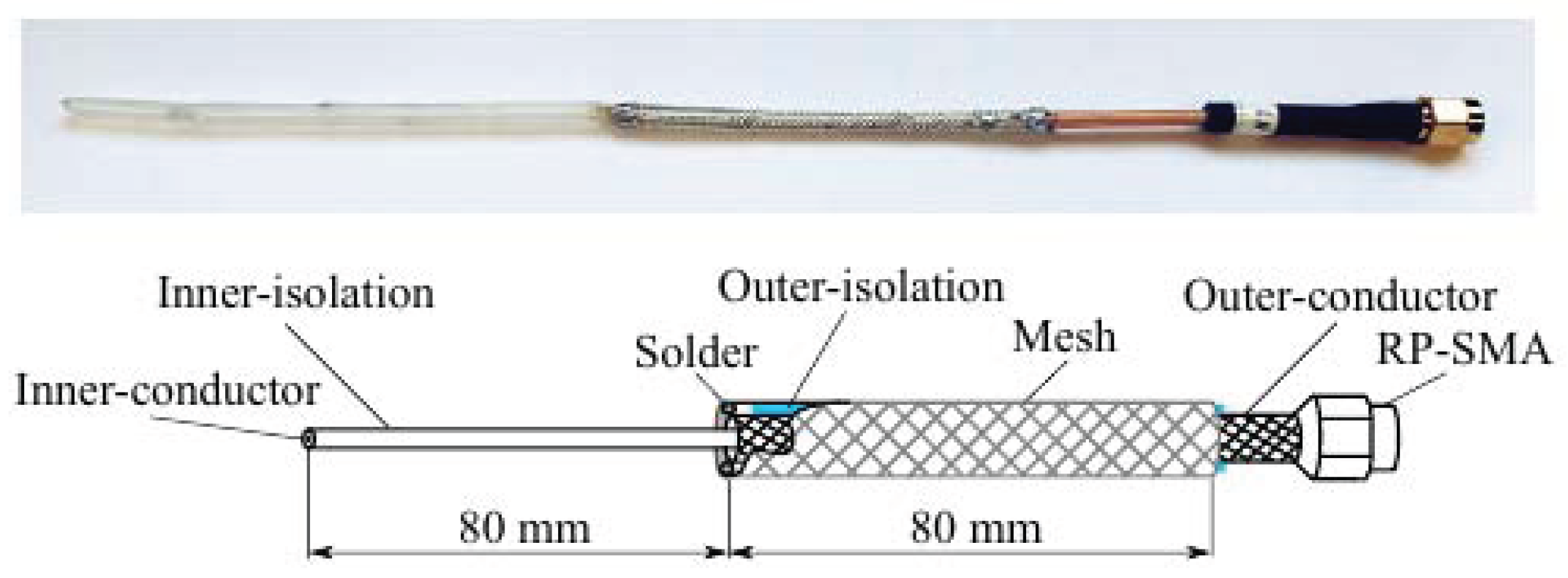
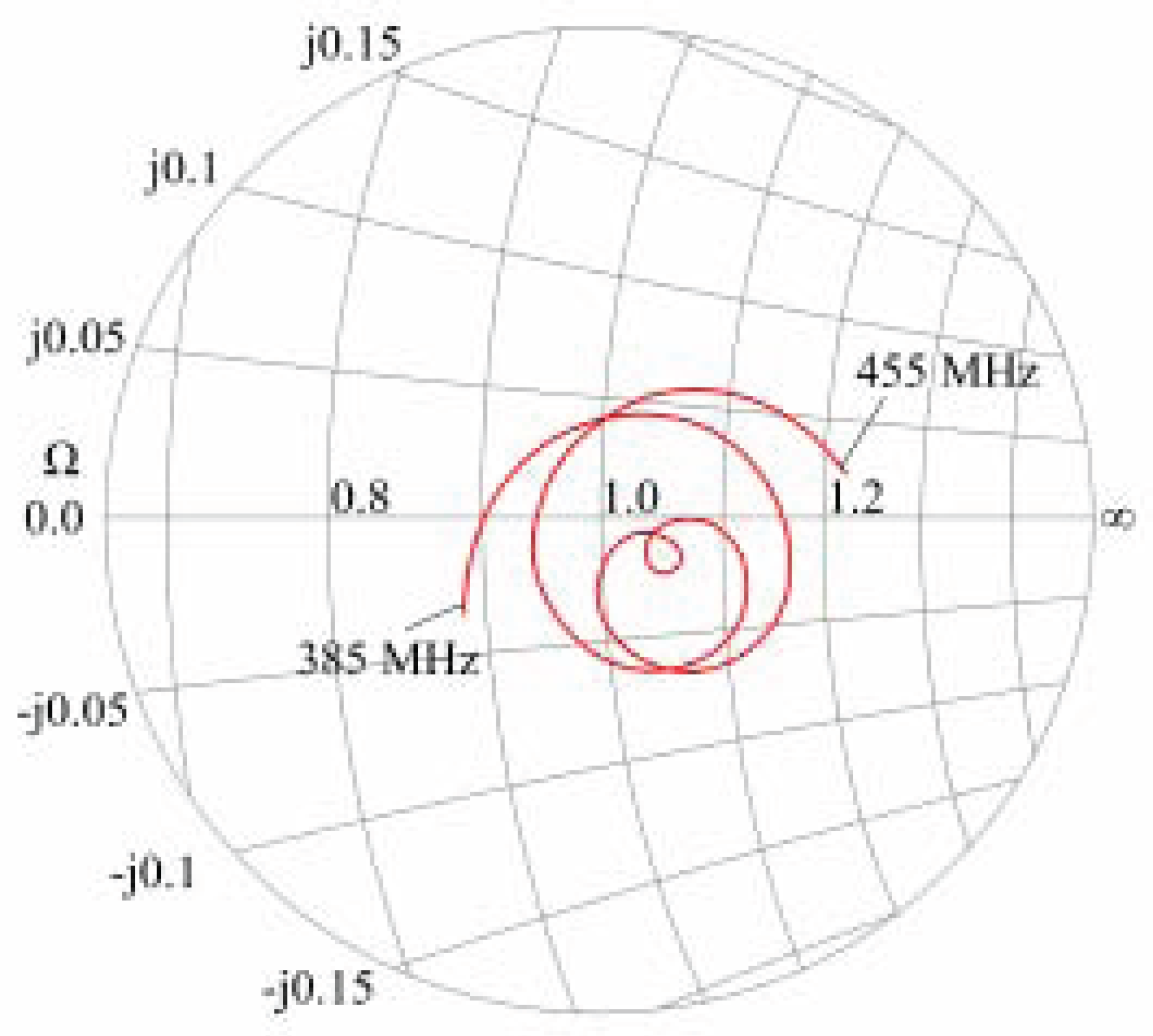
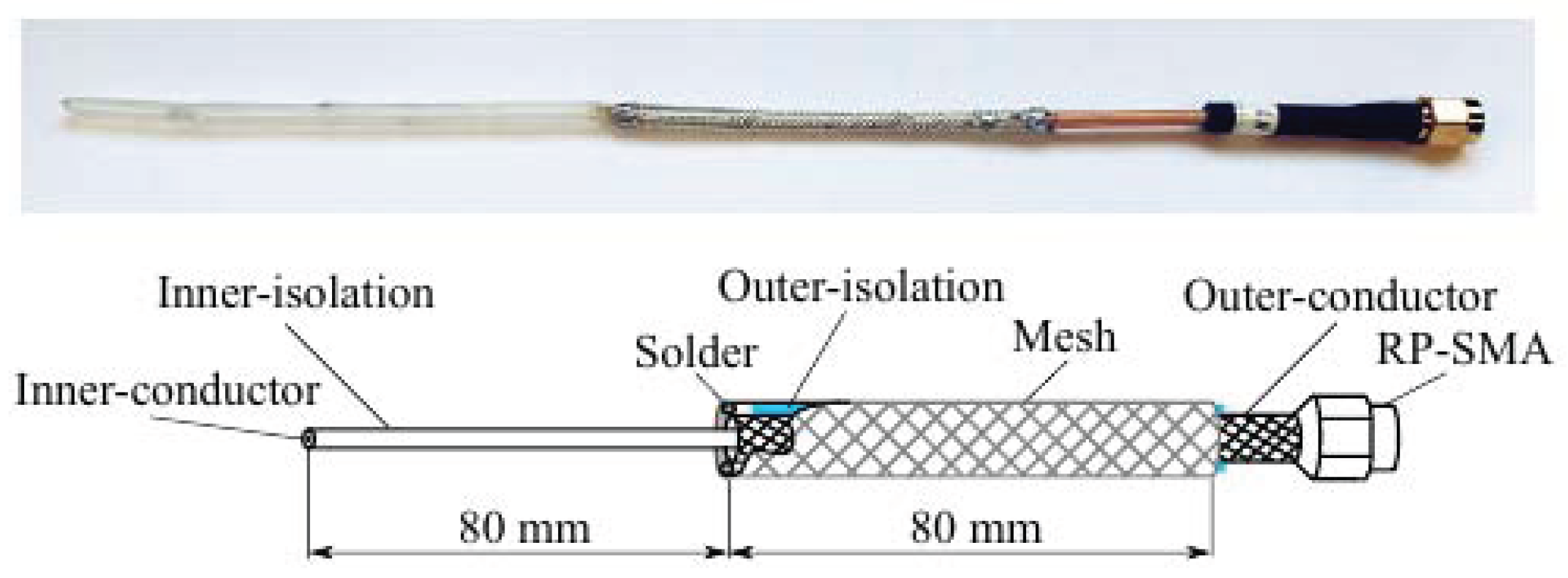
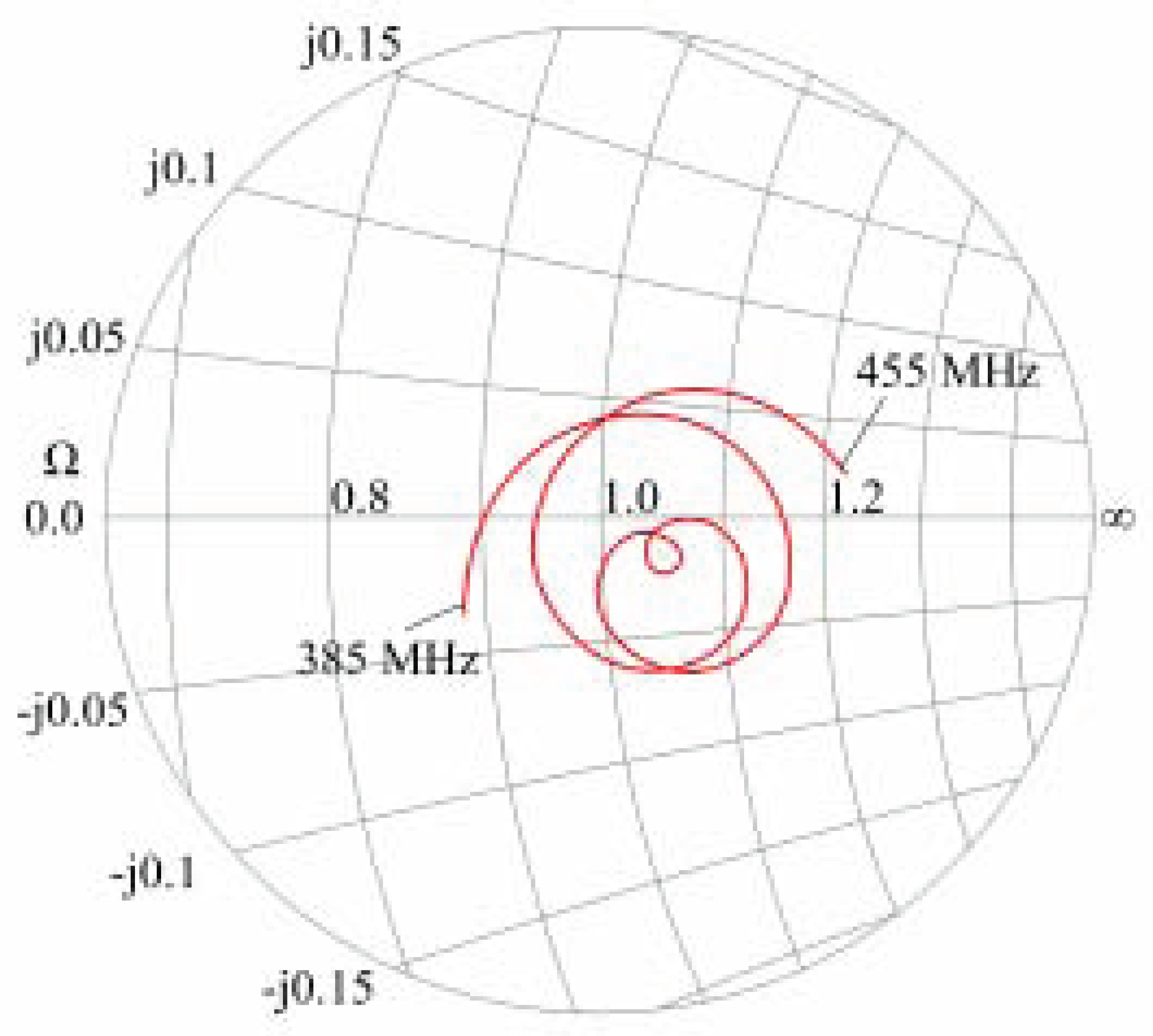
3.1. Antenna Design
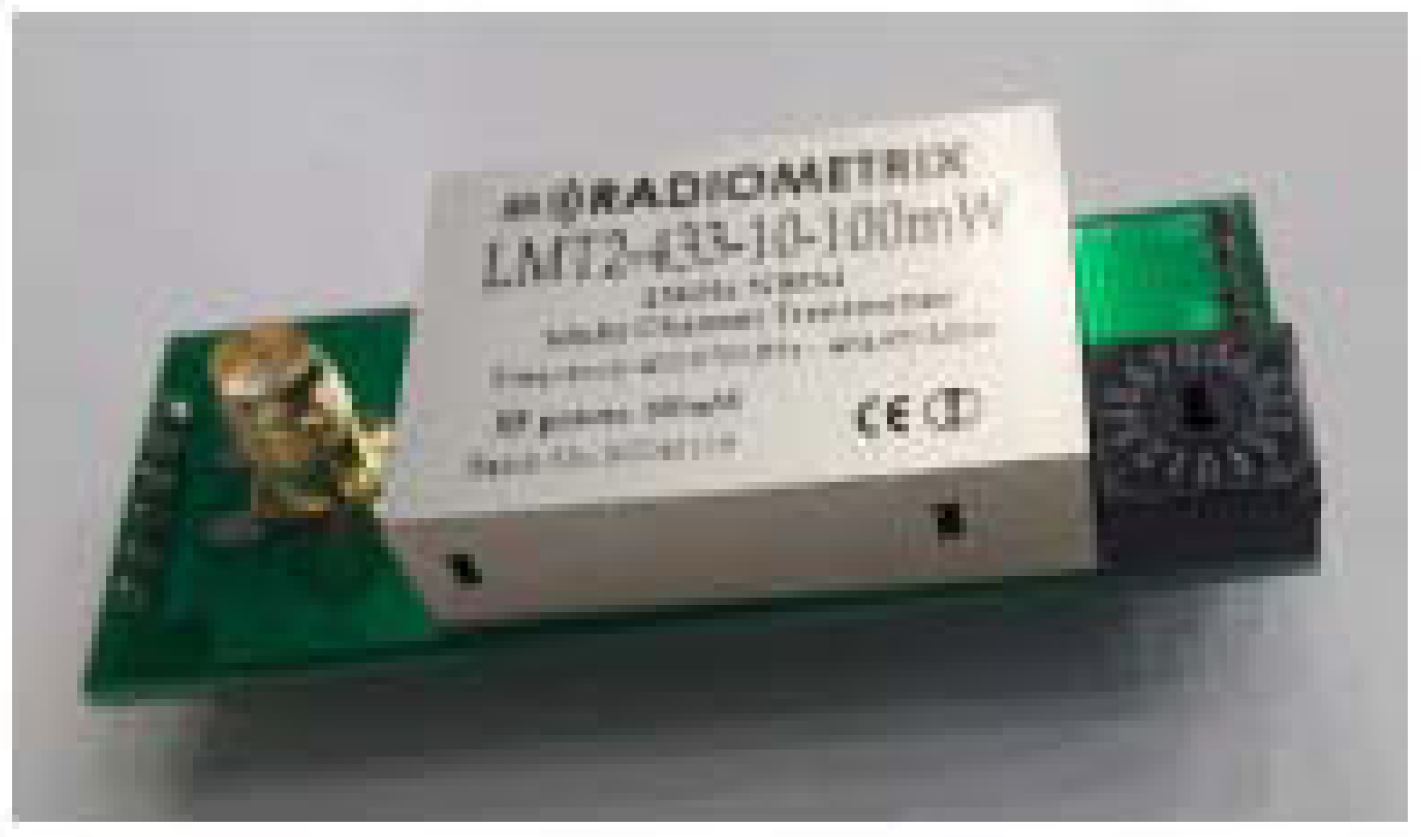
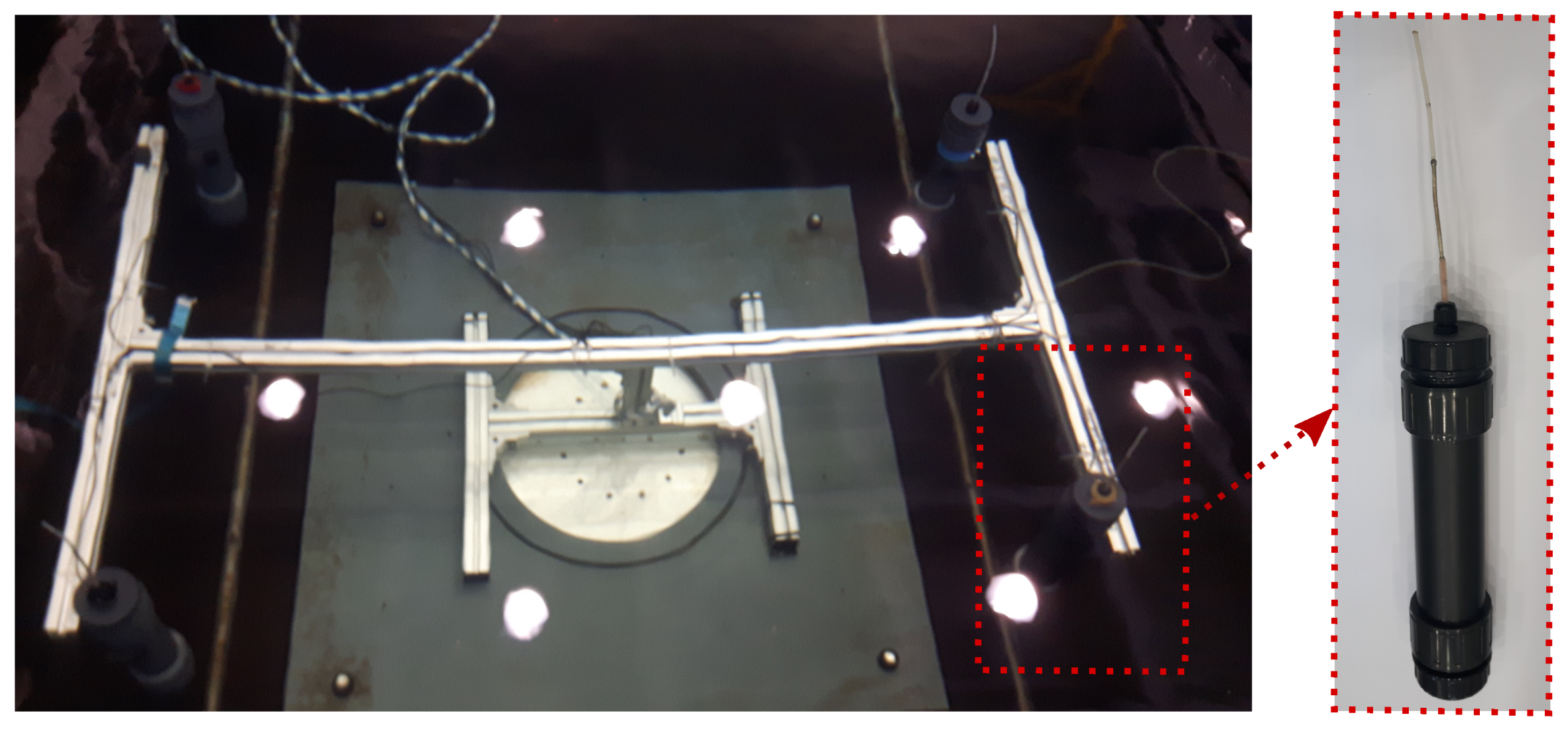
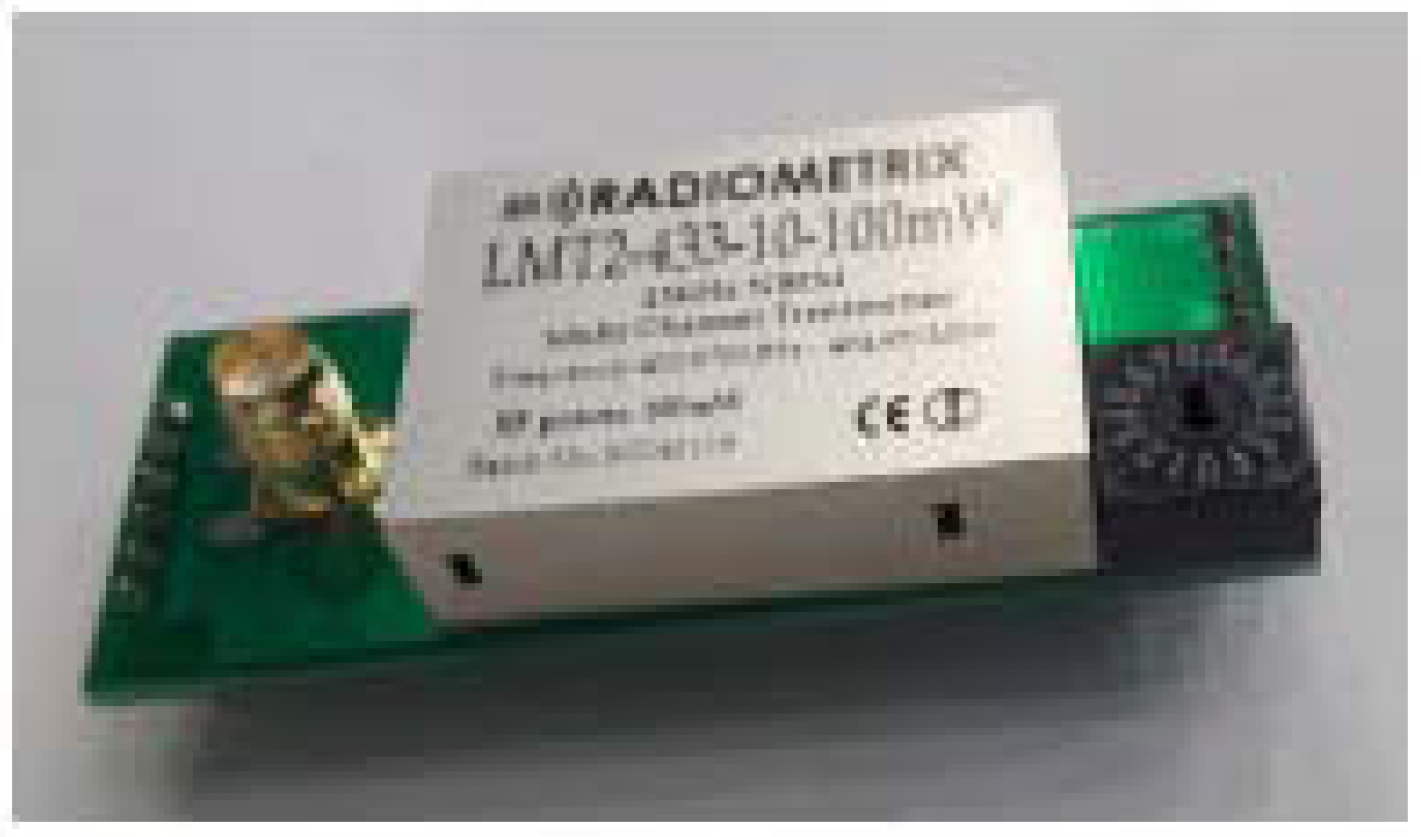
3.2. Fixed Beacons
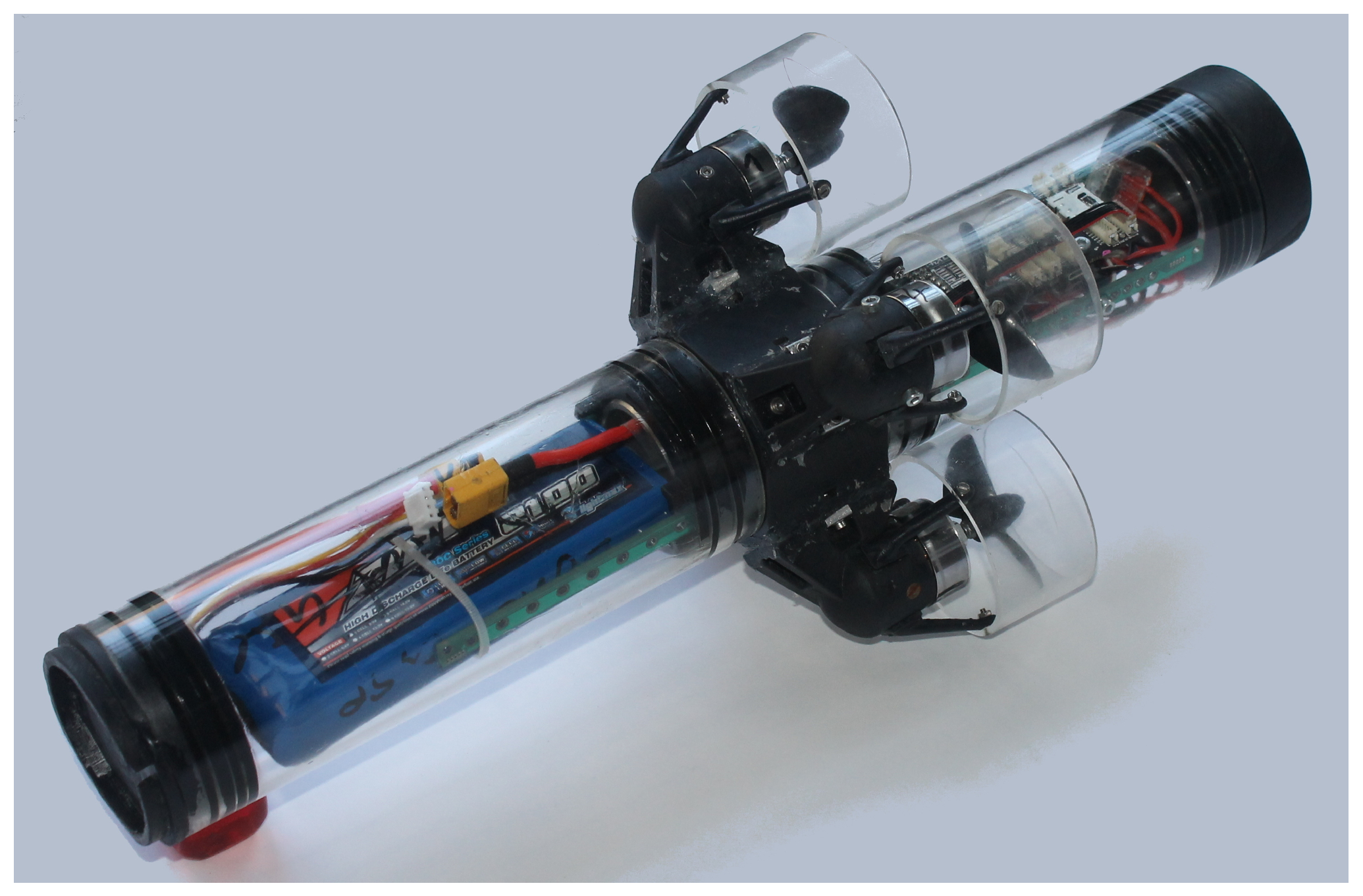
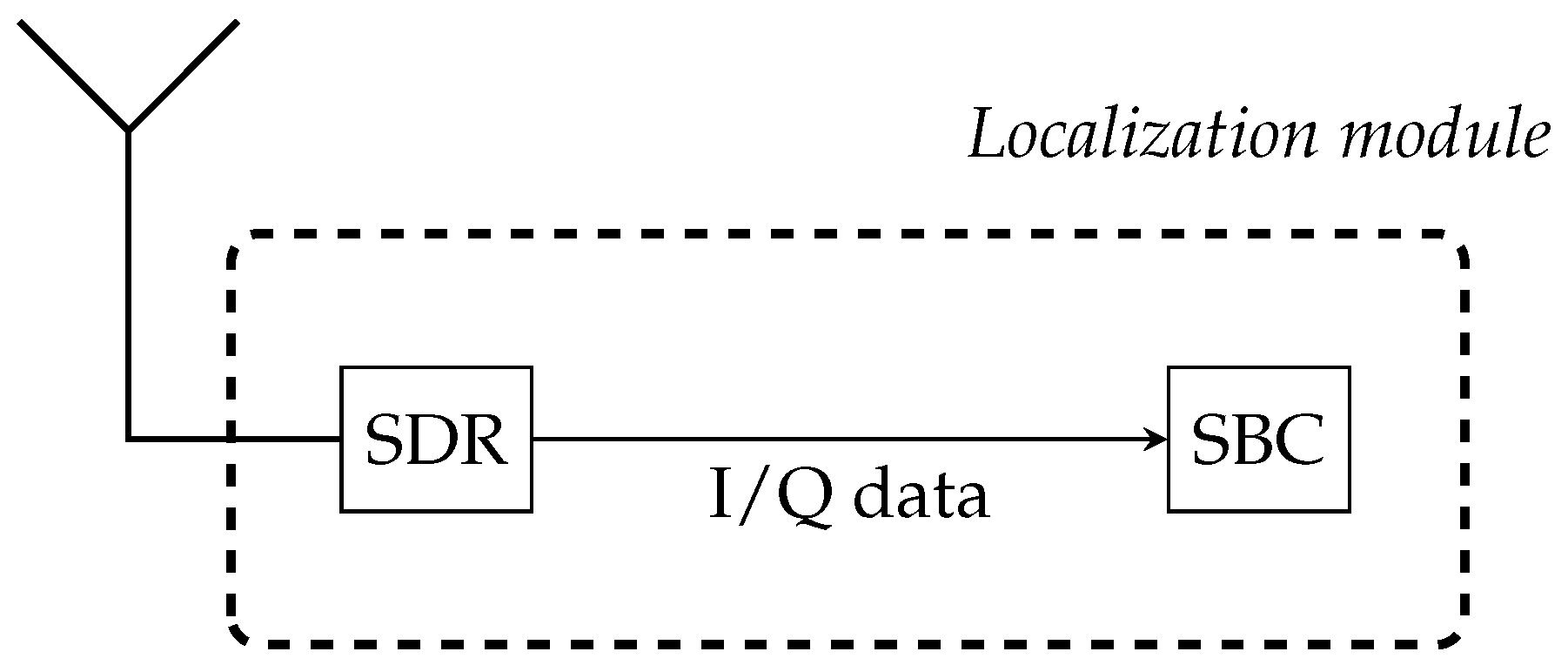
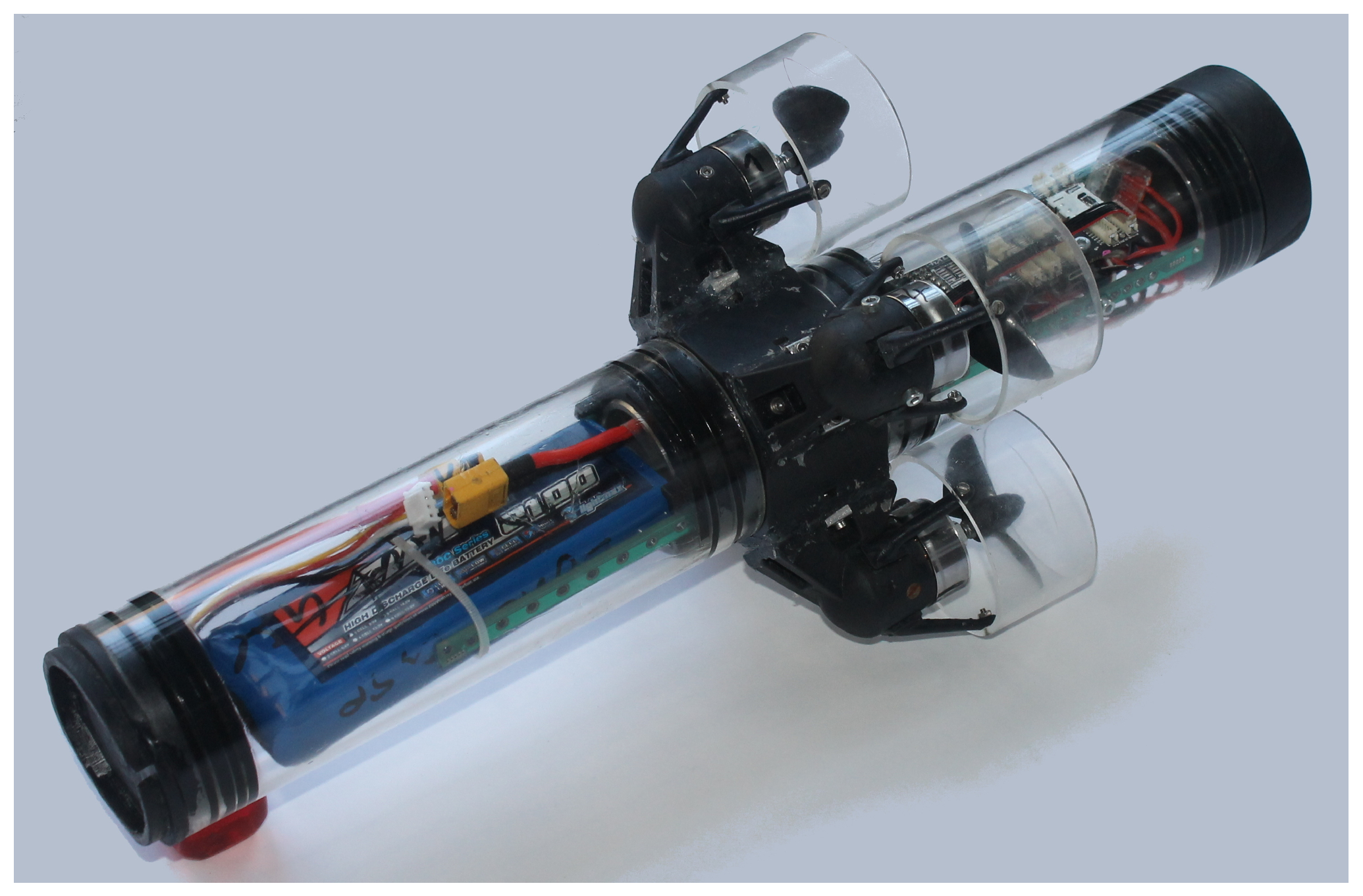
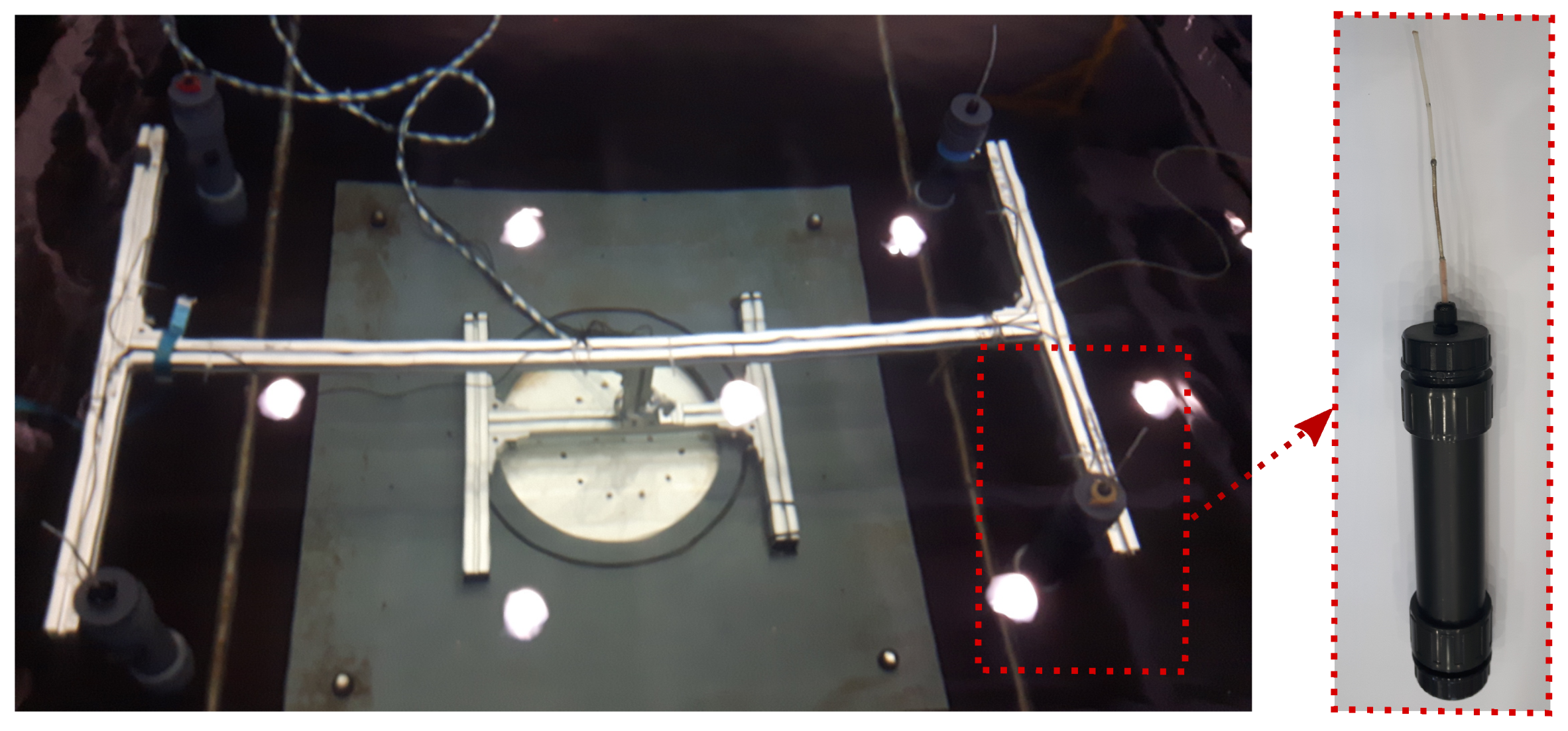
3.3. Mobile Receiver Unit
- it calculates real-time RSS values based on the URSM;
- and it computes its position from the RSS values.
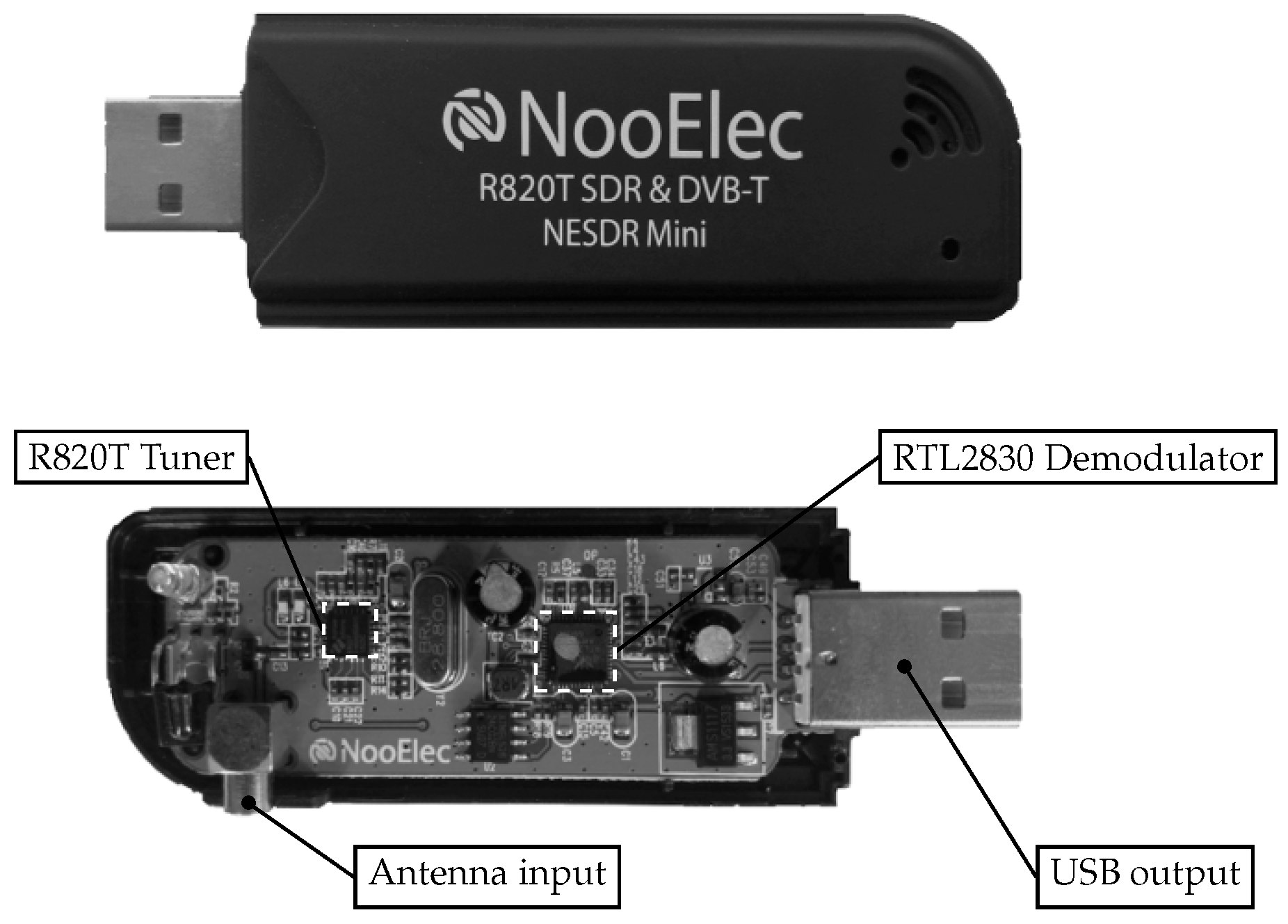
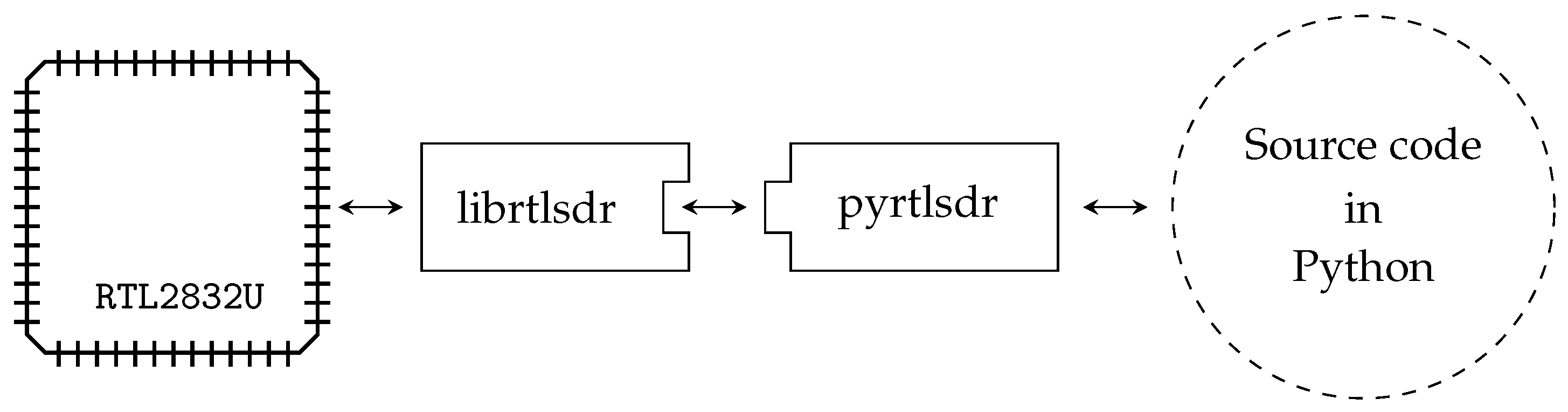
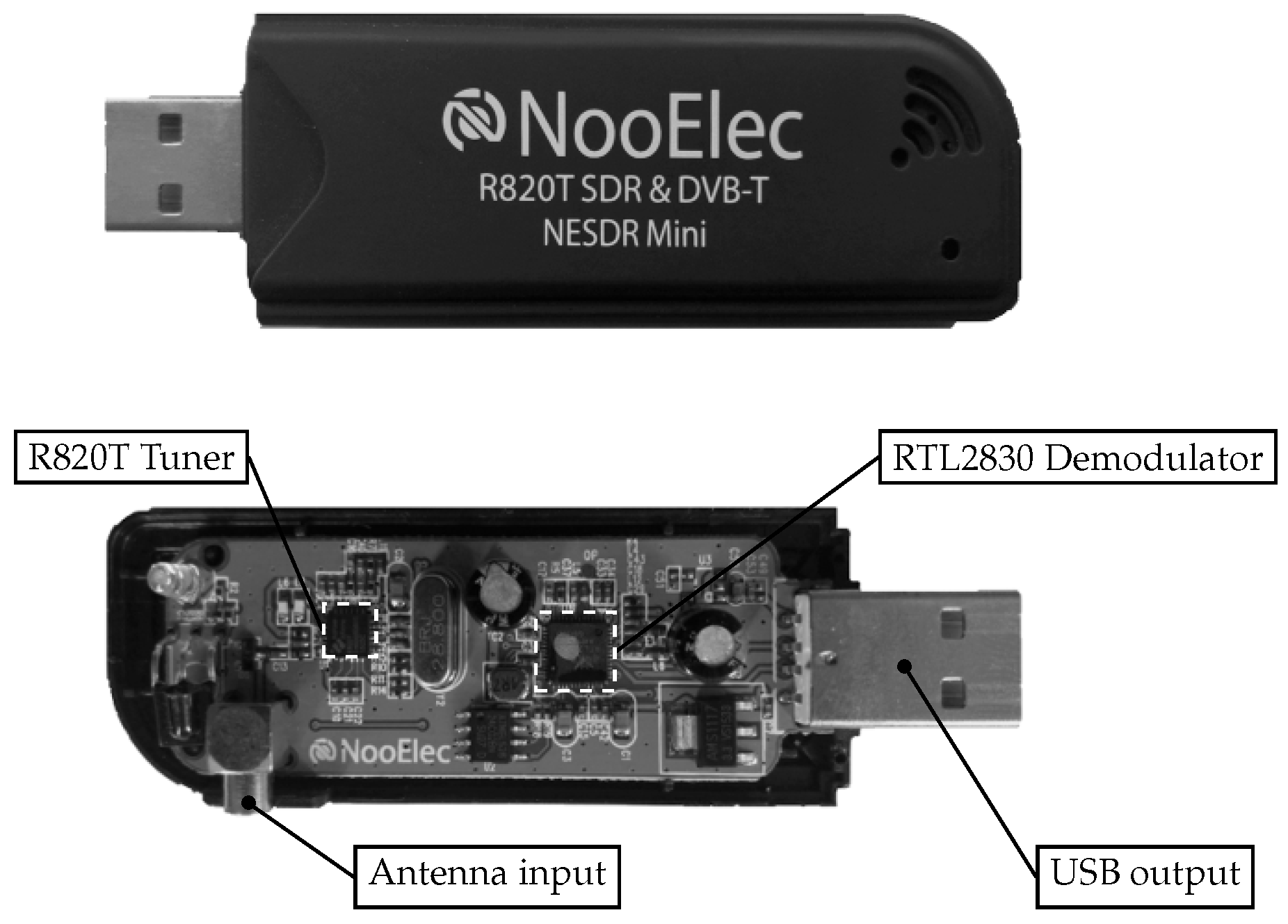
3.3.1. Modified DVB-T USB Dongle
3.3.2. Single Board Computer
4. Firmware Design
4.1. Calibration
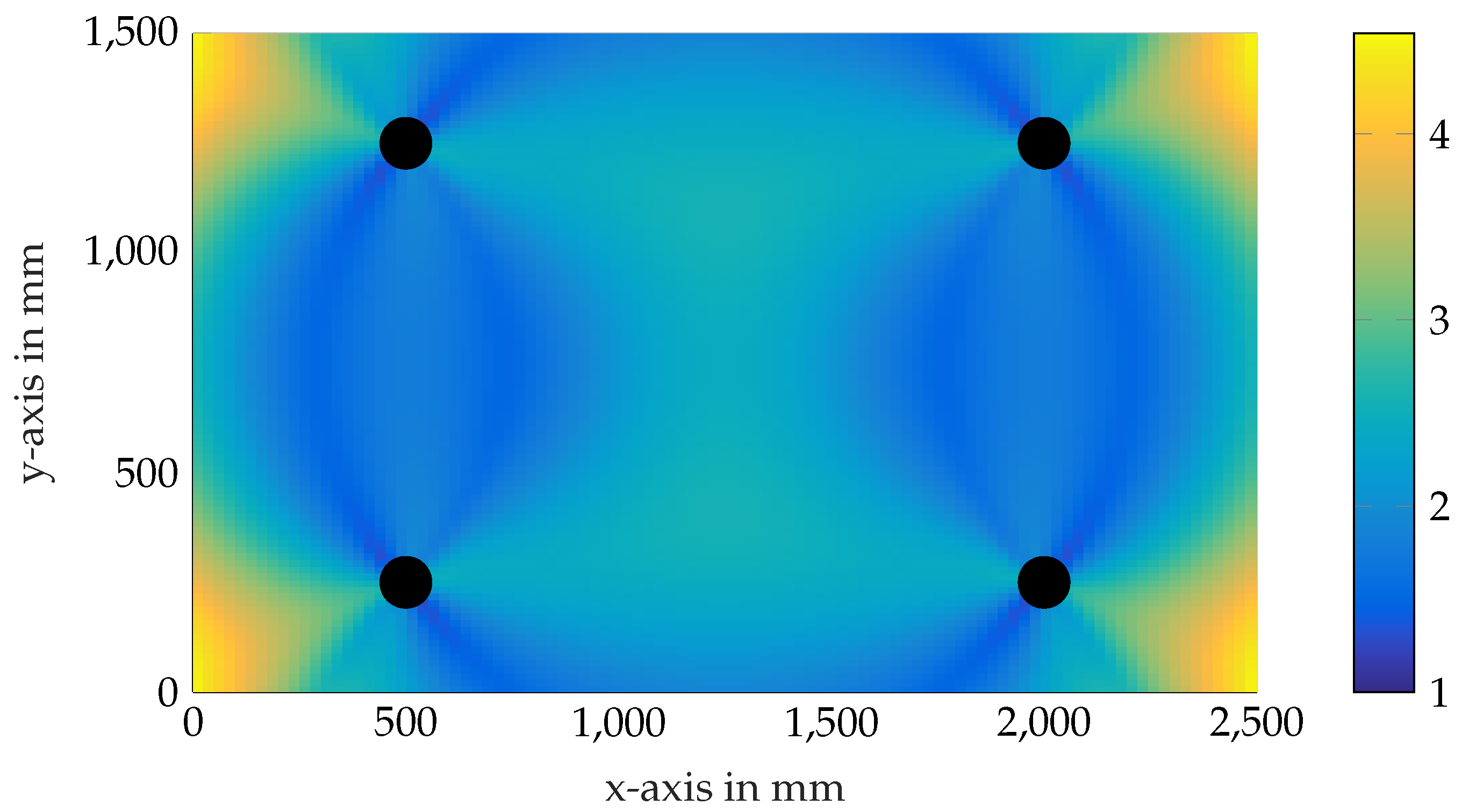
- Measurement of the power spectrum density of the EM-field at a series of different positions, i.e., a grid.
- Determination of RSS values for each beacon frequency by applying an FFT on the measured power spectrum density at each measurement position.
- Fitting of the URSM for each beacon according to the collected data by using a non-linear least-squares algorithm.
4.2. Localization
5. Results
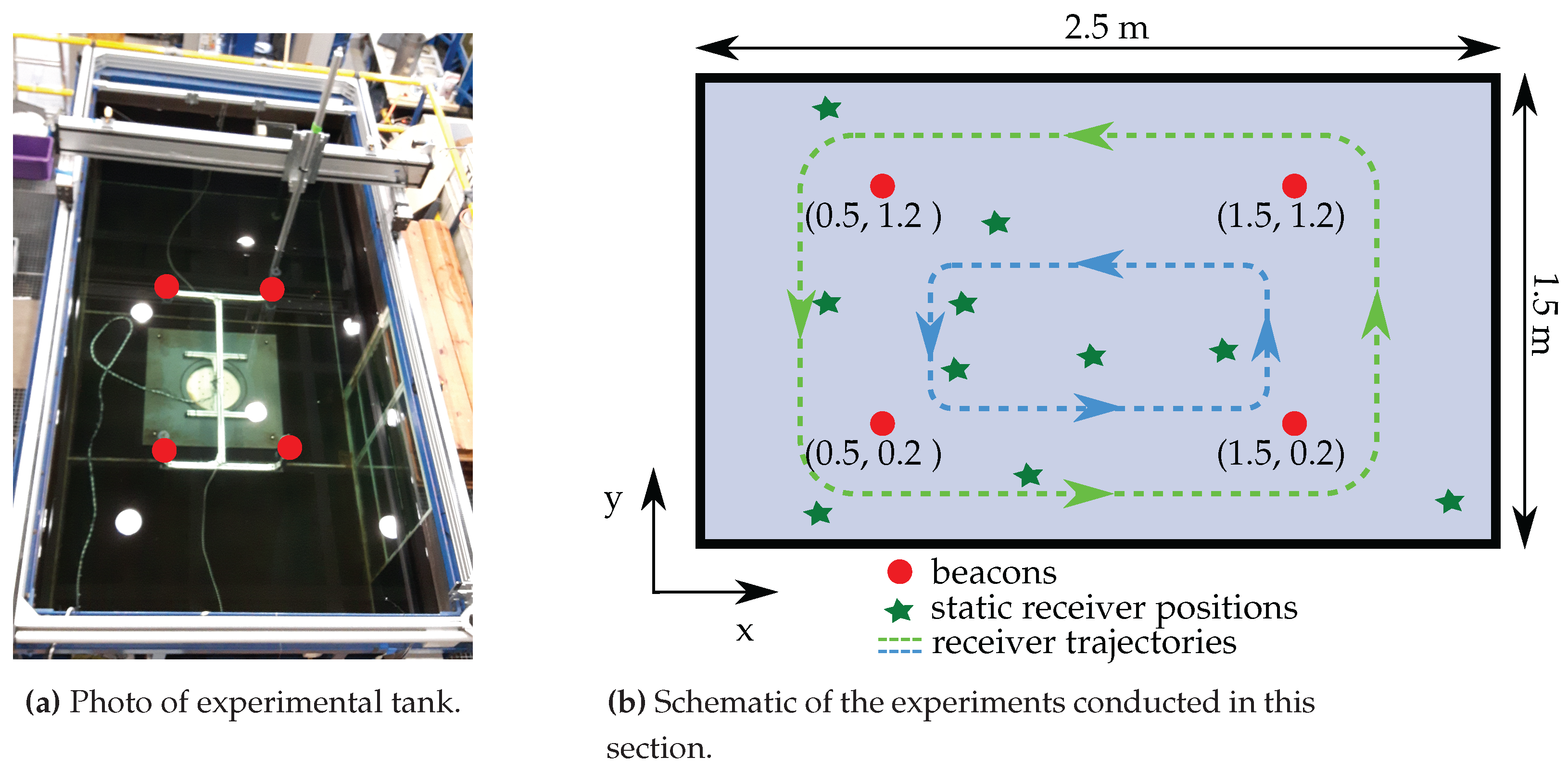
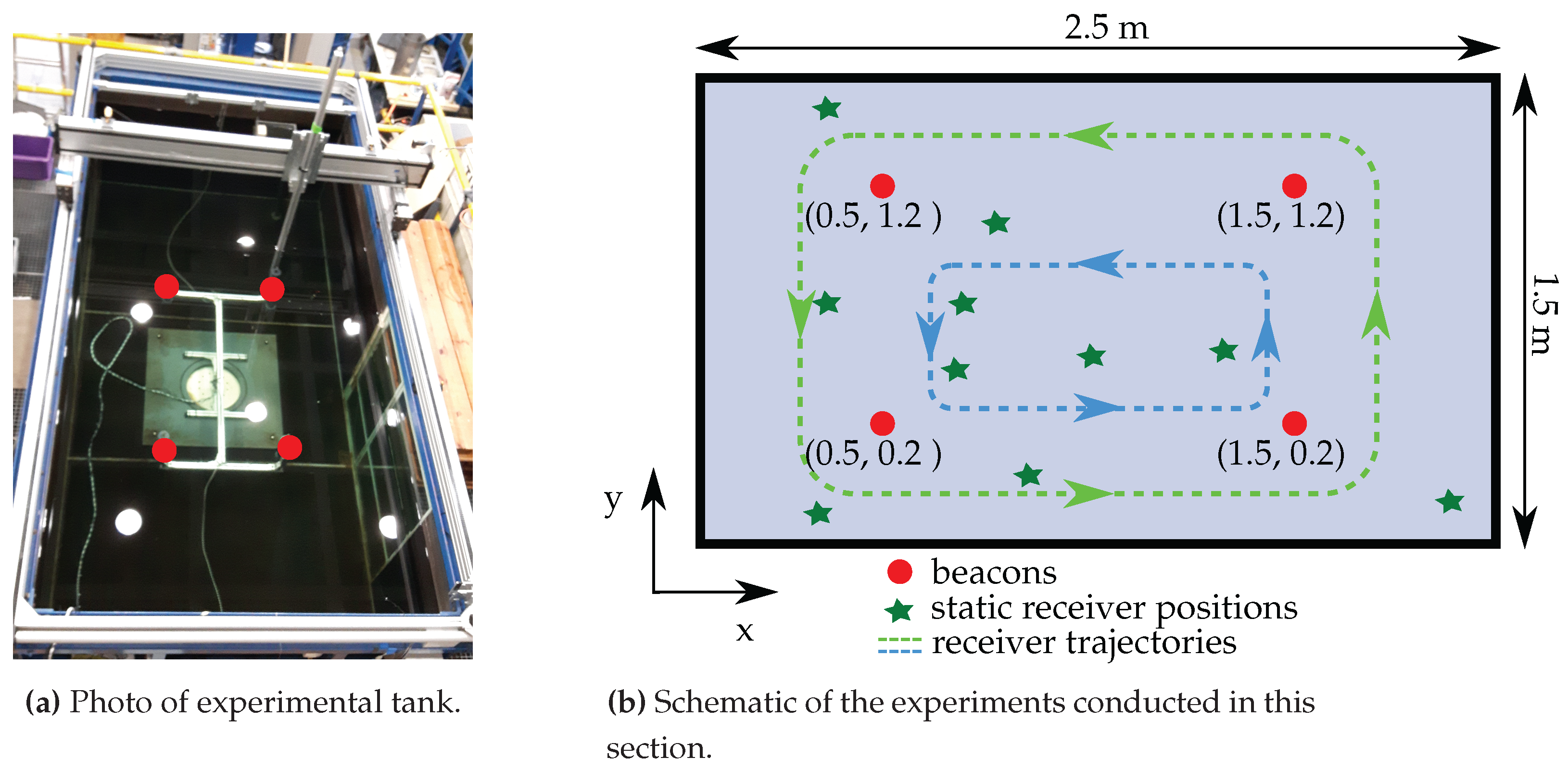
5.1. Experimental Setup
5.2. Data Processing
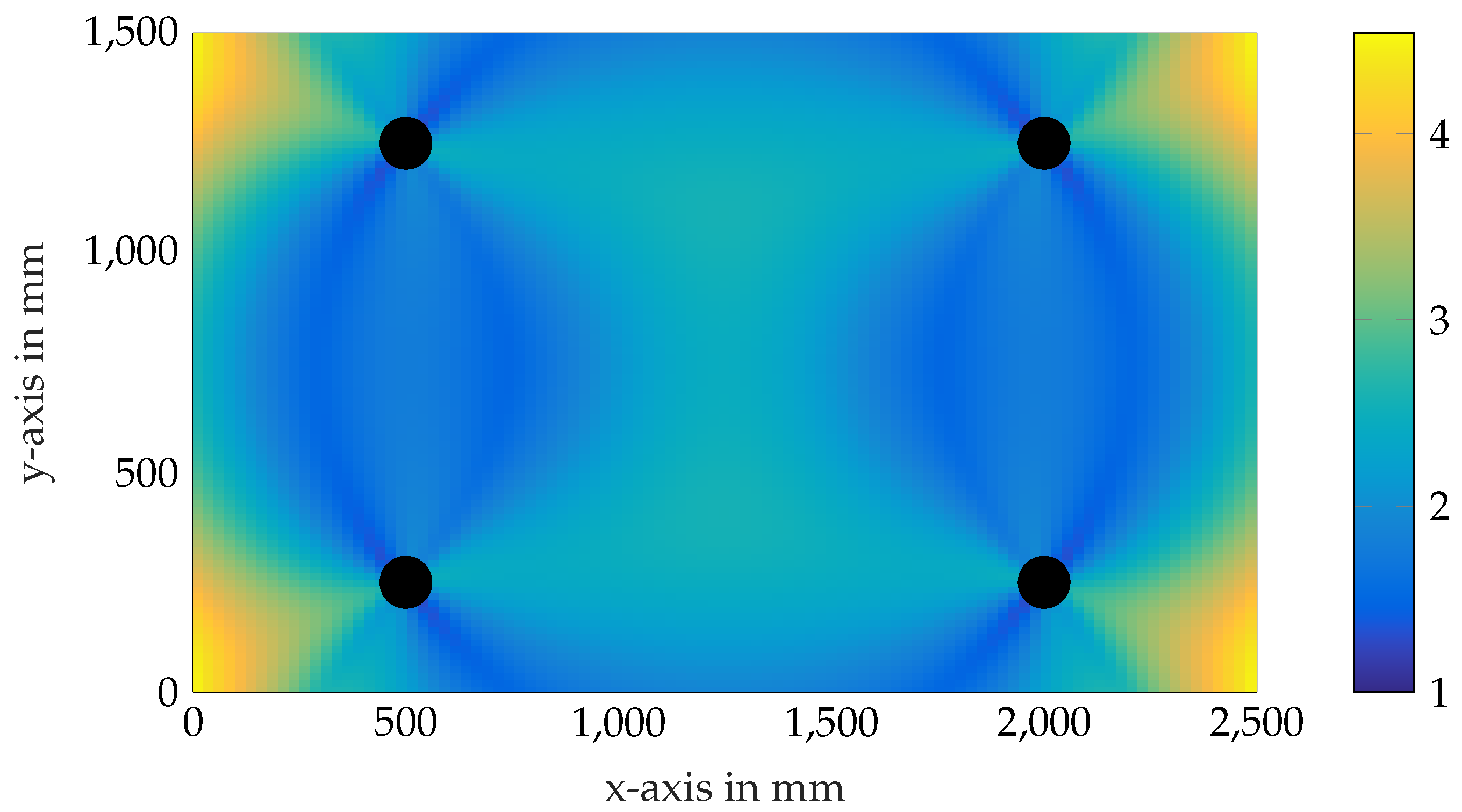
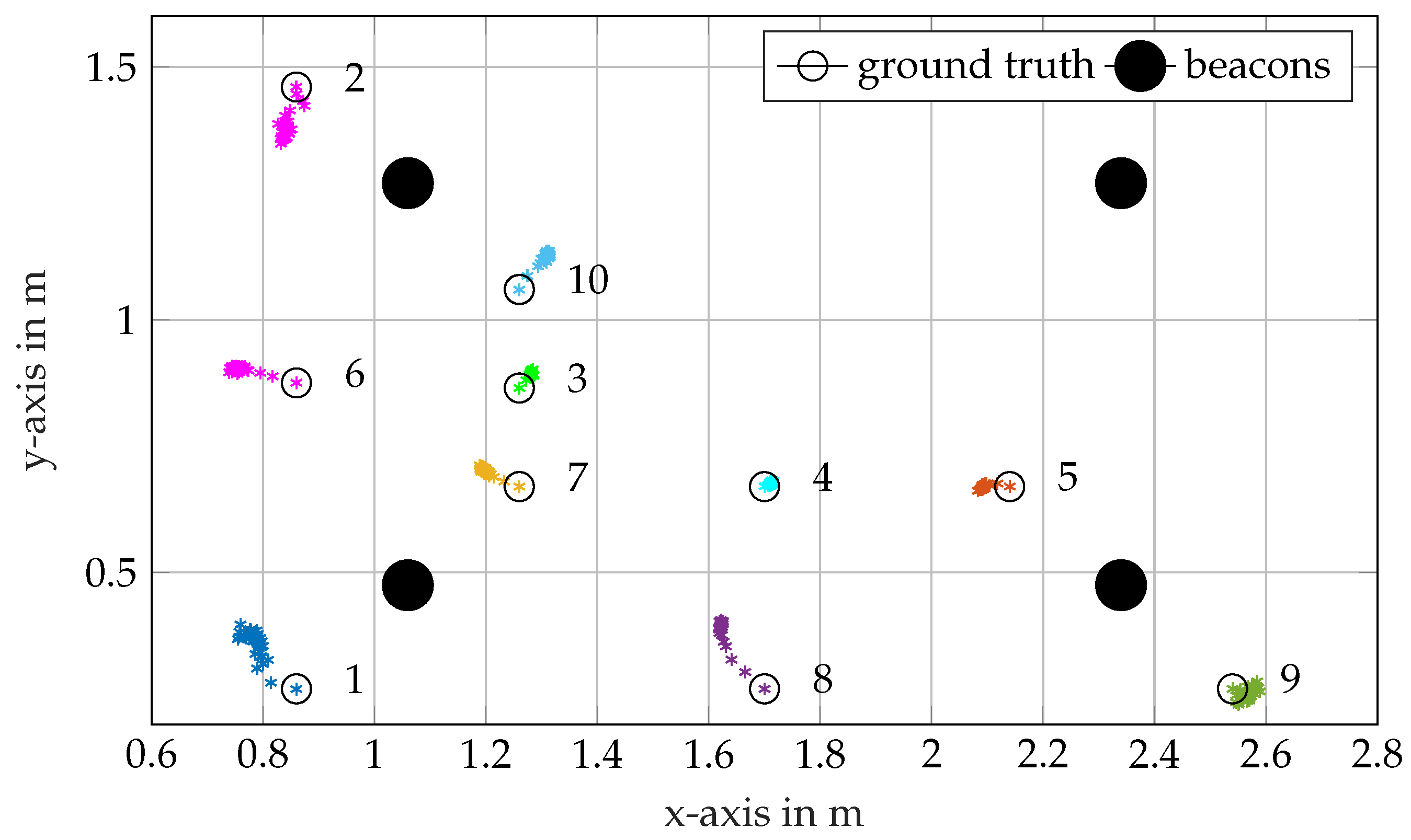
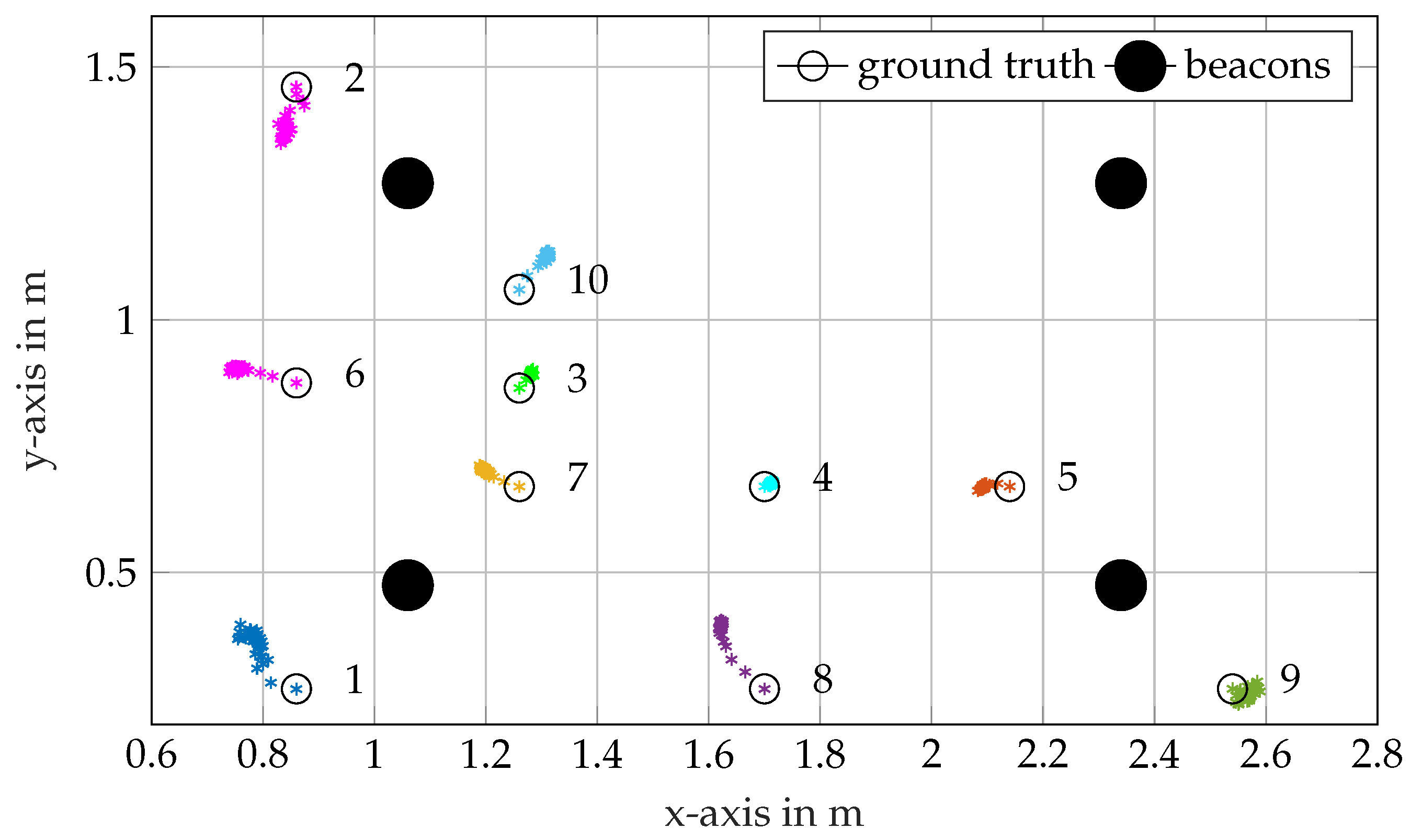
5.3. Static Position Estimation
5.4. Dynamic Position Estimation
6. Summary and Outlook
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| AUVs | Micro autonomous underwater vehicles |
| ADC | Analog digital conversion |
| COFDM | Coded orthogonal frequency-division multiplexing |
| CRLB | Cramér–Rao lower bound |
| DVB-T | Digital video broadcasting-terrestrial |
| EKF | Extended Kalman filter |
| EM | Electro-magnetic |
| FFT | Fast Fourier transformation |
| GNSS | Global Navigation Satellite Systems |
| I/Q | In-phase and quadrature |
| PF | Particle filter |
| RF | Radio frequency |
| RSM | Range sensor model |
| RSS | Received signal strength |
| SBC | Single board computer |
| SDR | Software defined radio |
| UHF | Ultra-high frequency |
| USB | Universal serial bus |
References
- Griffiths, A.; Dikarev, A.; Green, P.R.; Lennox, B.; Poteau, X.; Watson, S. AVEXIS–Aqua Vehicle Explorer for In-Situ Sensing. IEEE Robot. Autom. Lett. 2016, 1, 282–287. [Google Scholar] [CrossRef]
- Hackbarth, A.; Kreuzer, E.; Solowjow, E. HippoCampus: A micro underwater vehicle for swarm applications. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 2258–2263. [Google Scholar]
- Park, D.; Kwak, K.; Chung, W.K.; Kim, J. Development of underwater distance sensor using EM wave attenuation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 5125–5130. [Google Scholar]
- Park, D.; Kwak, K.; Kim, J.; Chung, W.K. Underwater sensor network using received signal strength of electromagnetic waves. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October; pp. 1052–1057.
- Park, D.; Kwak, K.; Chung, W.K.; Kim, J. Development of underwater short-range sensor using electromagnetic wave attenuation. J. Ocean. Eng. 2016, 41, 318–325. [Google Scholar]
- Park, D.; Kwak, K.; Kim, J.; Chung, W.K. 3D underwater localization scheme using EM wave attenuation with a depth sensor. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 2631–2636. [Google Scholar]
- Kwak, K.; Park, D.; Chung, W.K.; Kim, J. Underwater 3-D Spatial Attenuation Characteristics of Electromagnetic Waves with Omnidirectional Antenna. Trans. Mech. 2016, 21, 1409–1419. [Google Scholar] [CrossRef]
- Sydney, N.; Napora, S.; Paley, D.A. A Multi-vehicle Testbed for Underwater Motion Coordination. In Proceedings of the 10th Performance Metrics for Intelligent Systems Workshop (PerMIS ‘10), Baltimore, MD, USA, 28–30 September 2010; pp. 107–111. [Google Scholar]
- Johnson-Roberson, M.; Pizarro, O.; Williams, S.B.; Mahon, I. Generation and visualization of large-scale three-dimensional reconstructions from underwater robotic surveys. J. Field Robot. 2010, 27, 21–51. [Google Scholar] [CrossRef]
- Dikarev, A.; Griffiths, A.; Watson, S.A.; Lennox, B.; Green, P.R. Combined multiuser acoustic communication and localisation system for μAUVs operating in confined underwater environments. IFAC-PapersOnLine 2015, 48, 161–166. [Google Scholar] [CrossRef]
- Geist, R.A.; Hackbarth, A.; Kreuzer, E.; Rausch, V.; Sankur, M.; Solowjow, E. Towards a Hyperbolic Acoustic One-Way Localization System for Underwater Swarm Robotics. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 4551–4556. [Google Scholar]
- Renner, C.; Golkowski, A.J. Acoustic Modem for Micro AUVs: Design and Practical Evaluation. In Proceedings of the 11th ACM International Conference on Underwater Networks & Systems, Shanghai, China, 24–26 October 2016. [Google Scholar]
- Renner, C. Packet-Based Ranging with a Low-Power, Low-Cost Acoustic Modem for Micro AUVs. In Proceedings of the 11th International ITG Conference on Systems, Communications and Coding, Hamburg, Germany, 6–9 February 2017. [Google Scholar]
- Ganeriwal, S.; Kumar, R.; Srivastava, M.B. Timing-sync protocol for sensor networks. In Proceedings of the International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003; pp. 138–149. [Google Scholar]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Gordon, N.J.; Salmond, D.J.; Smith, A.F. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEE Proc. F Radar Signal Process. 1993, 140, 107–113. [Google Scholar] [CrossRef]



© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duecker, D.-A.; Geist, A.R.; Hengeler, M.; Kreuzer, E.; Pick, M.-A.; Rausch, V.; Solowjow, E. Embedded Spherical Localization for Micro Underwater Vehicles Based on Attenuation of Electro-Magnetic Carrier Signals. Sensors 2017, 17, 959. https://doi.org/10.3390/s17050959
Duecker D-A, Geist AR, Hengeler M, Kreuzer E, Pick M-A, Rausch V, Solowjow E. Embedded Spherical Localization for Micro Underwater Vehicles Based on Attenuation of Electro-Magnetic Carrier Signals. Sensors. 2017; 17(5):959. https://doi.org/10.3390/s17050959
Chicago/Turabian StyleDuecker, Daniel-André, A. René Geist, Michael Hengeler, Edwin Kreuzer, Marc-André Pick, Viktor Rausch, and Eugen Solowjow. 2017. "Embedded Spherical Localization for Micro Underwater Vehicles Based on Attenuation of Electro-Magnetic Carrier Signals" Sensors 17, no. 5: 959. https://doi.org/10.3390/s17050959