Practical Considerations before Installing Ground-Based Geodetic Infrastructure for Integrated InSAR and cGNSS Monitoring of Vertical Land Motion

 , and
, and
Abstract
:1. Introduction and Background
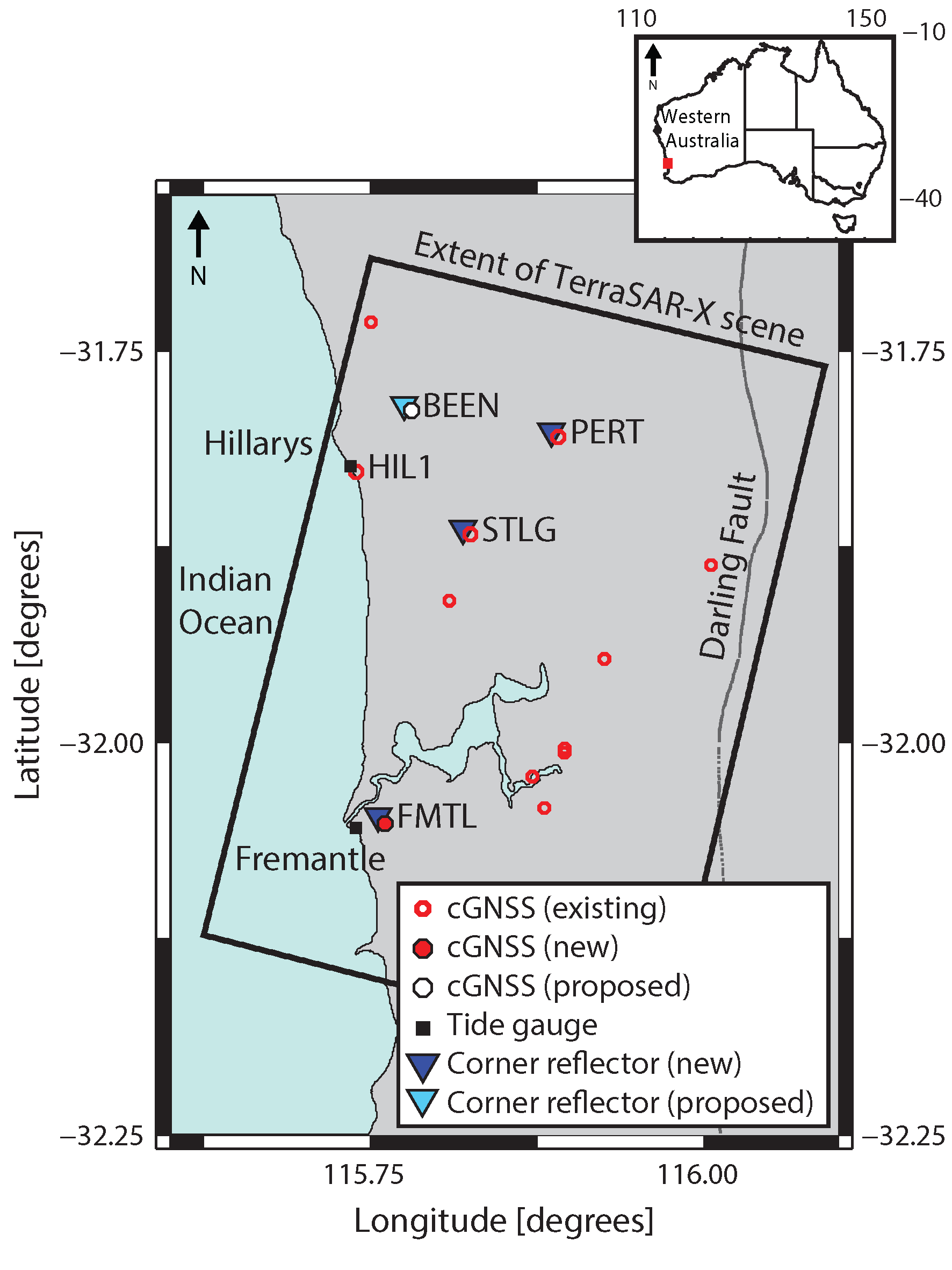
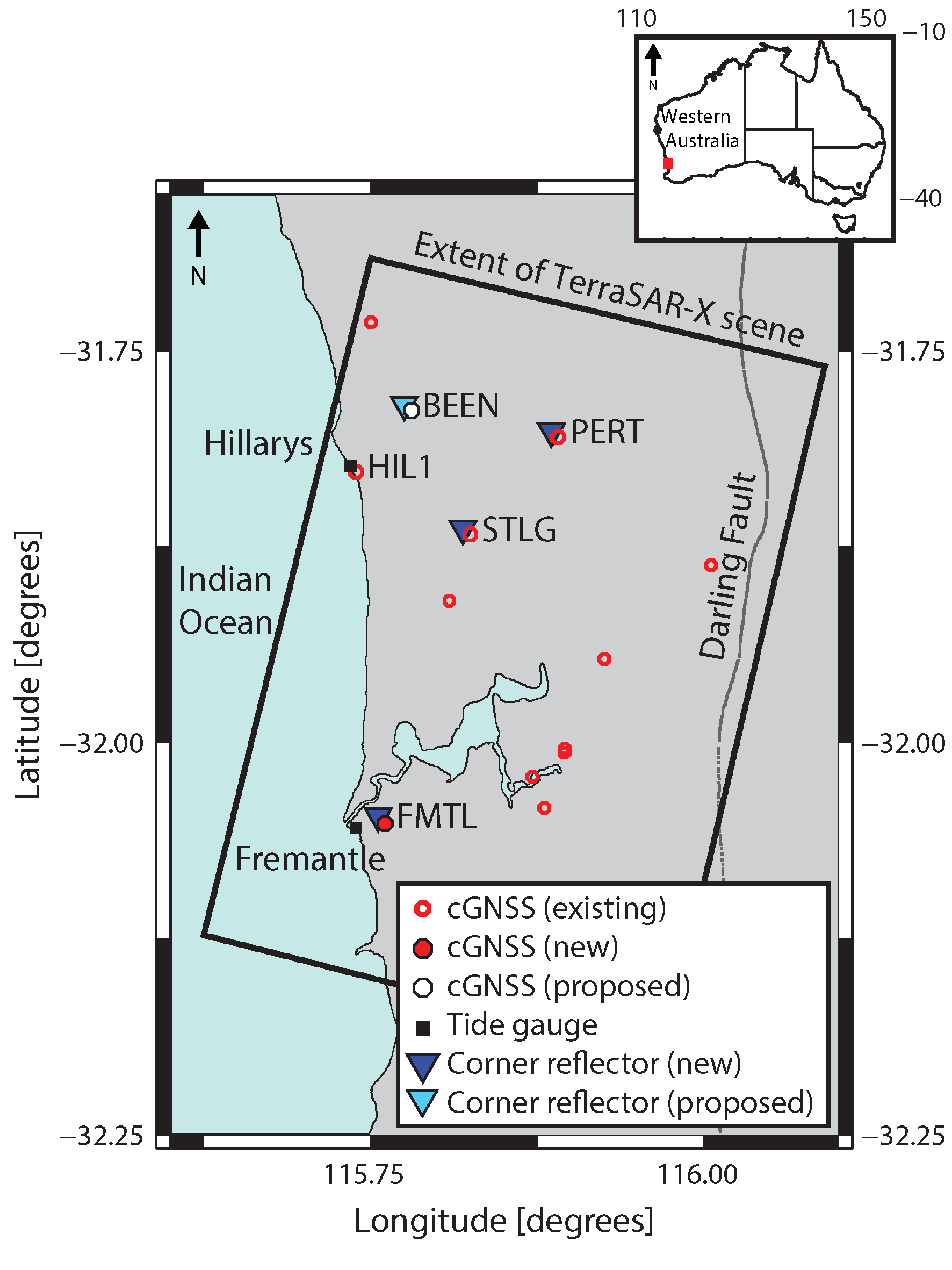
2. Ground Infrastructure for Measuring VLM in Perth
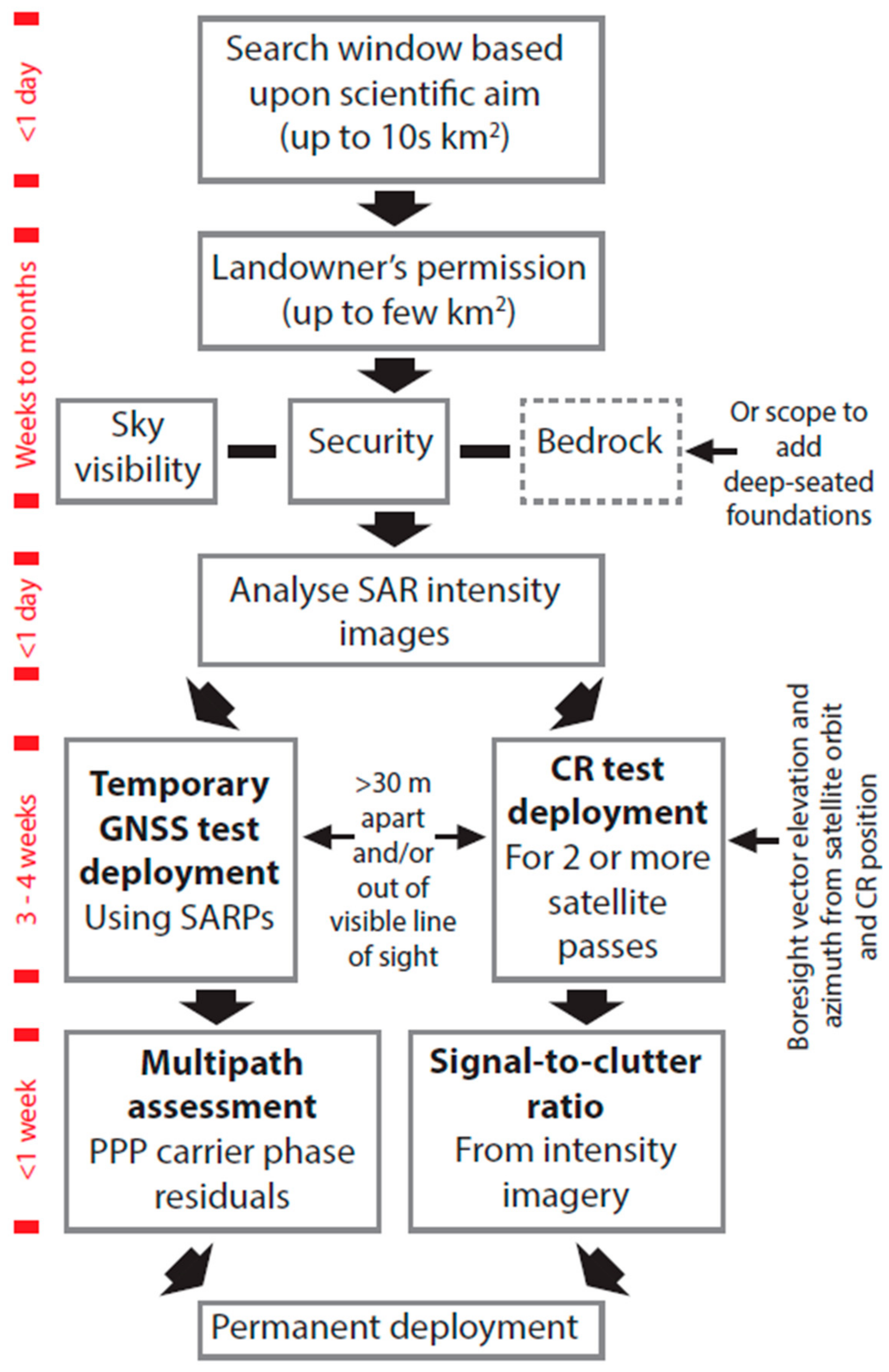
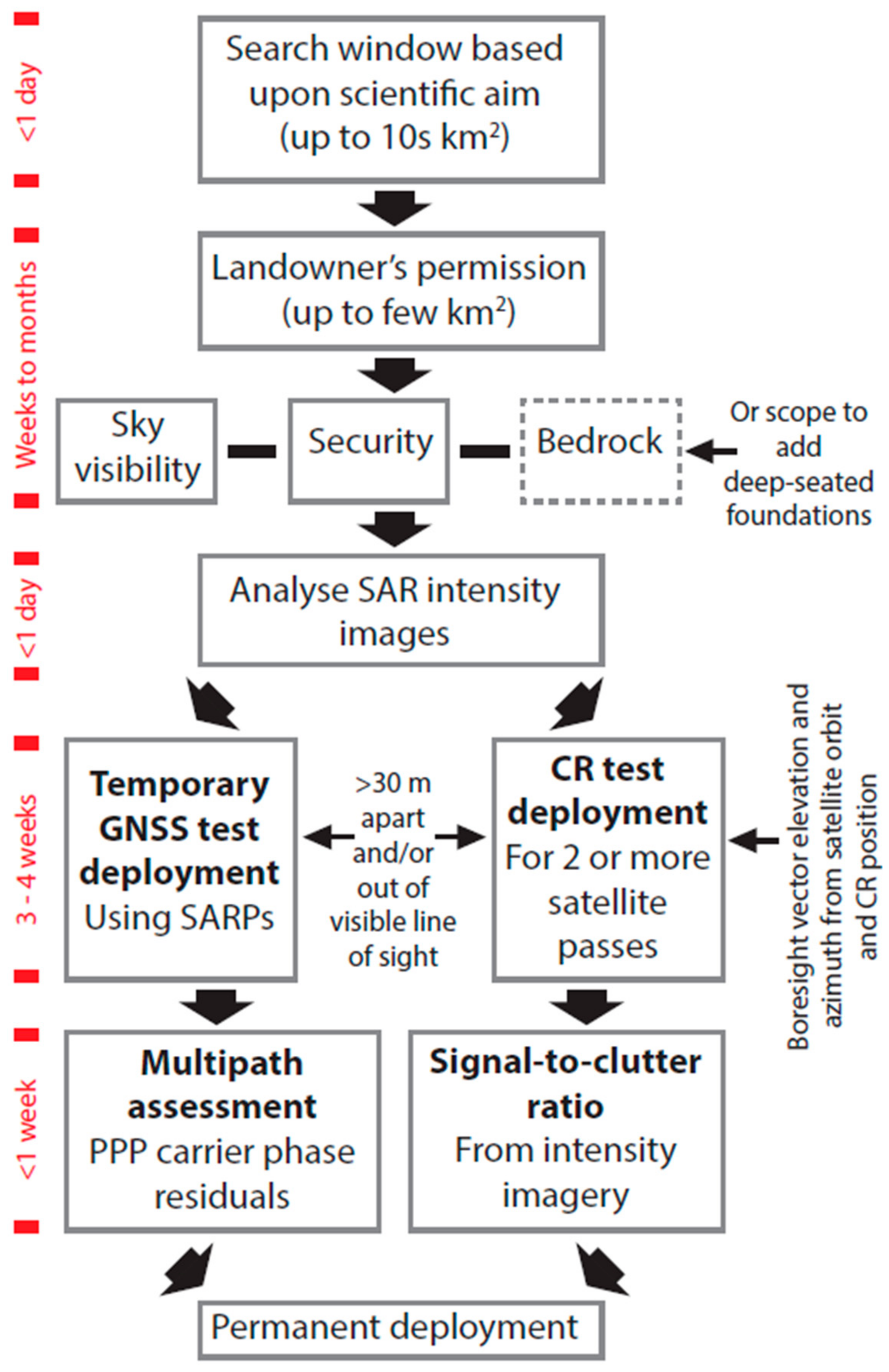
3. Practical Considerations for Installing Geodetic Infrastructure
3.1. General
3.2. cGNSS
3.3. InSAR CRs
4. cGNSS and CR Co-Locations
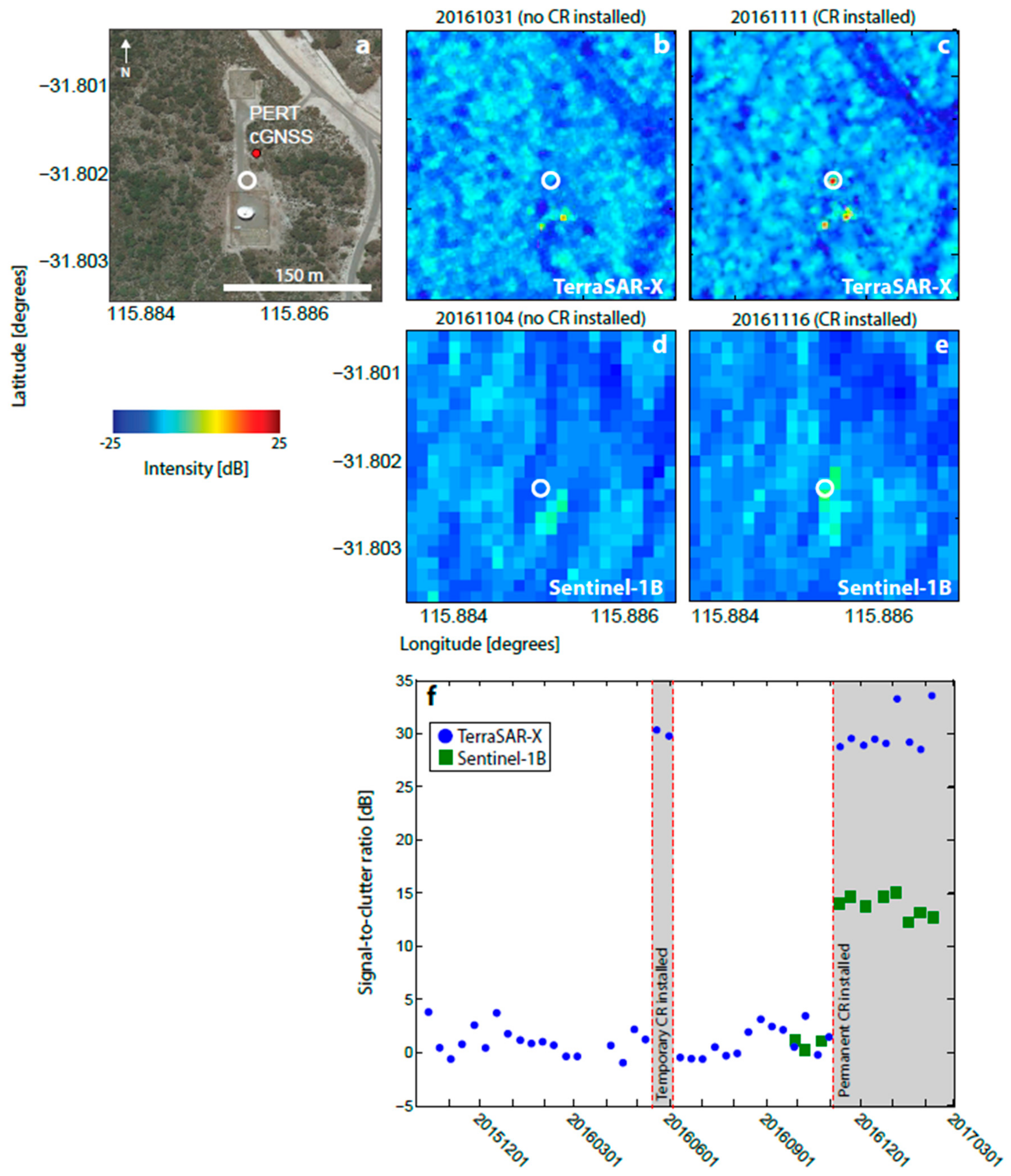
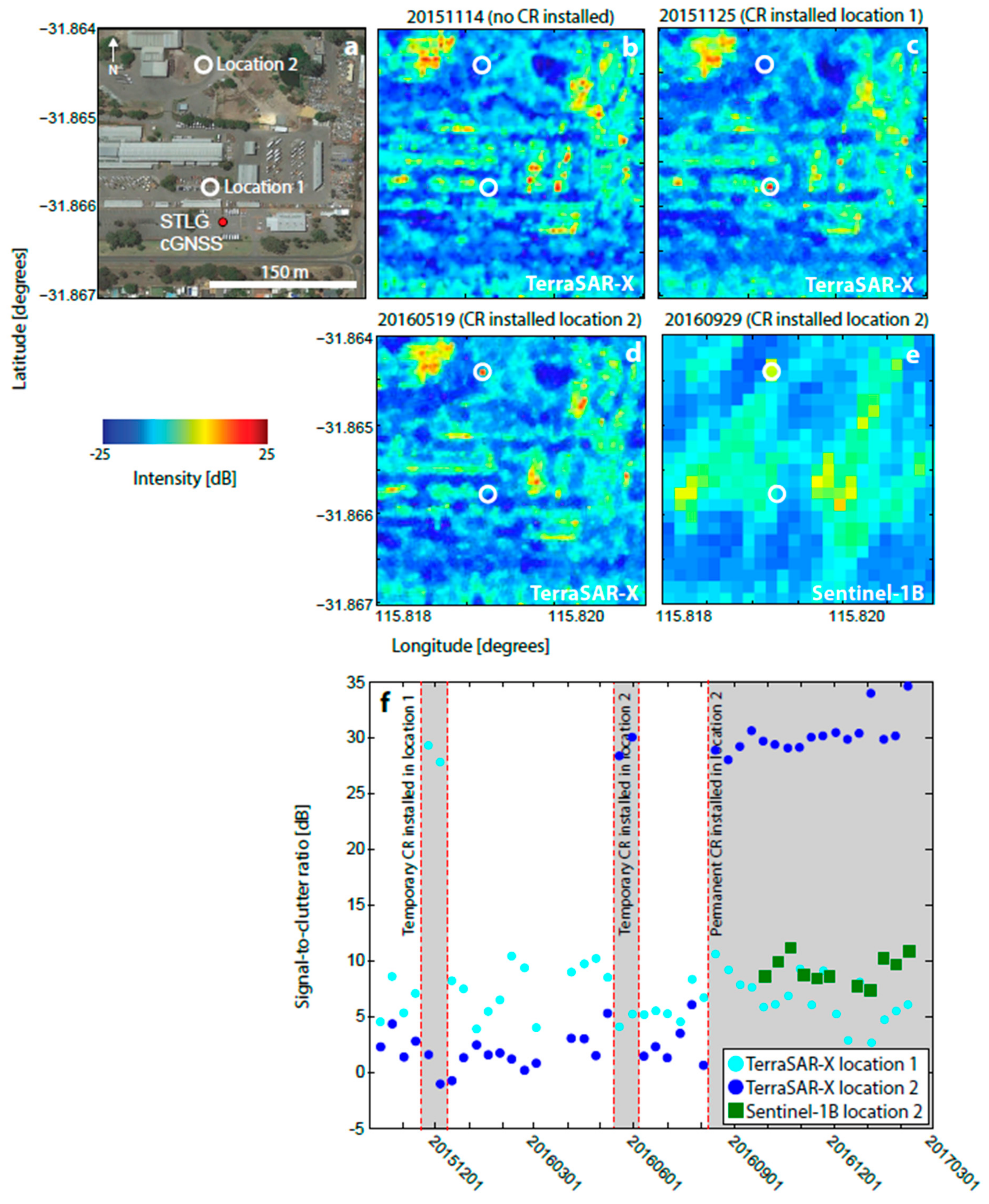
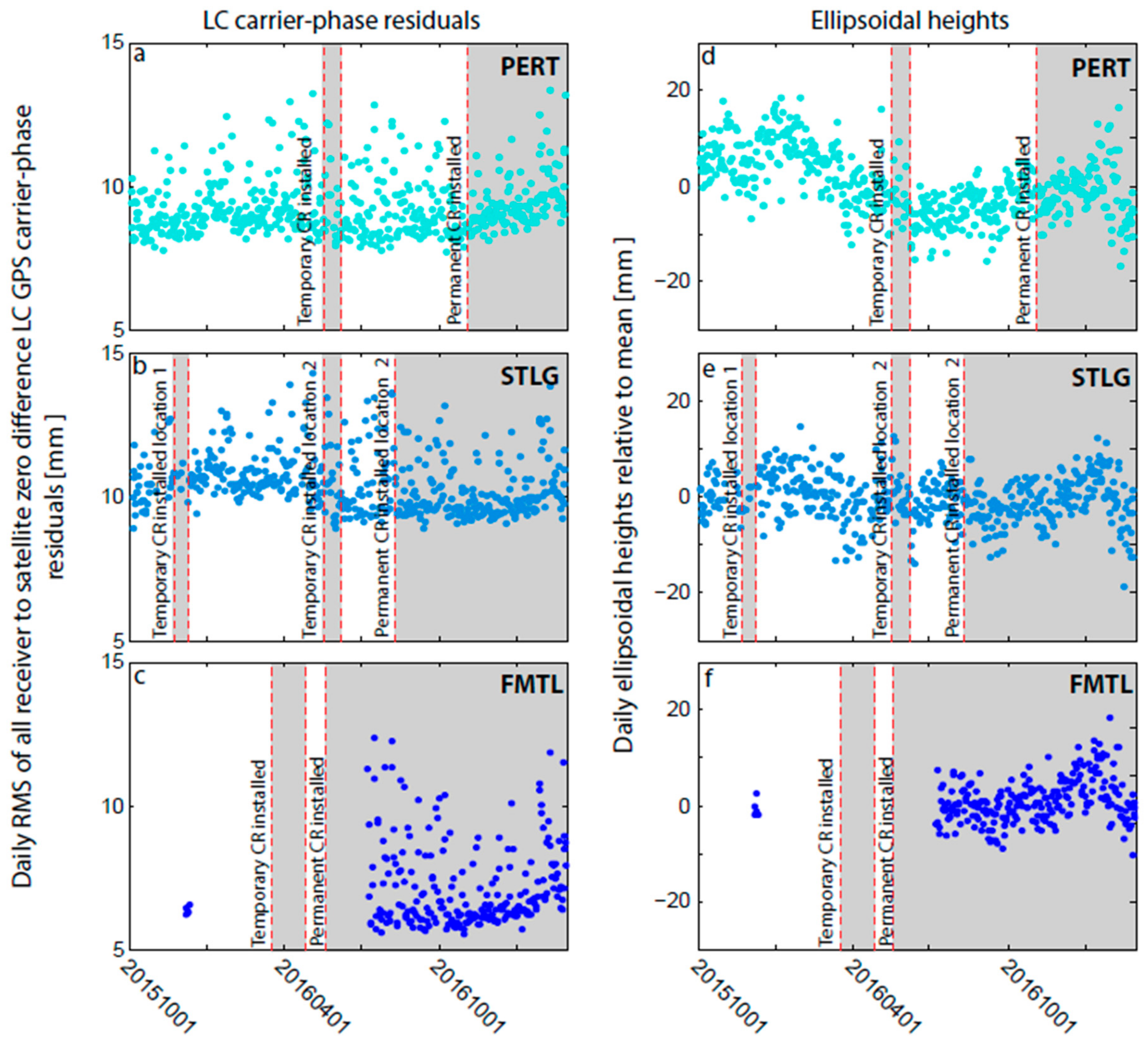
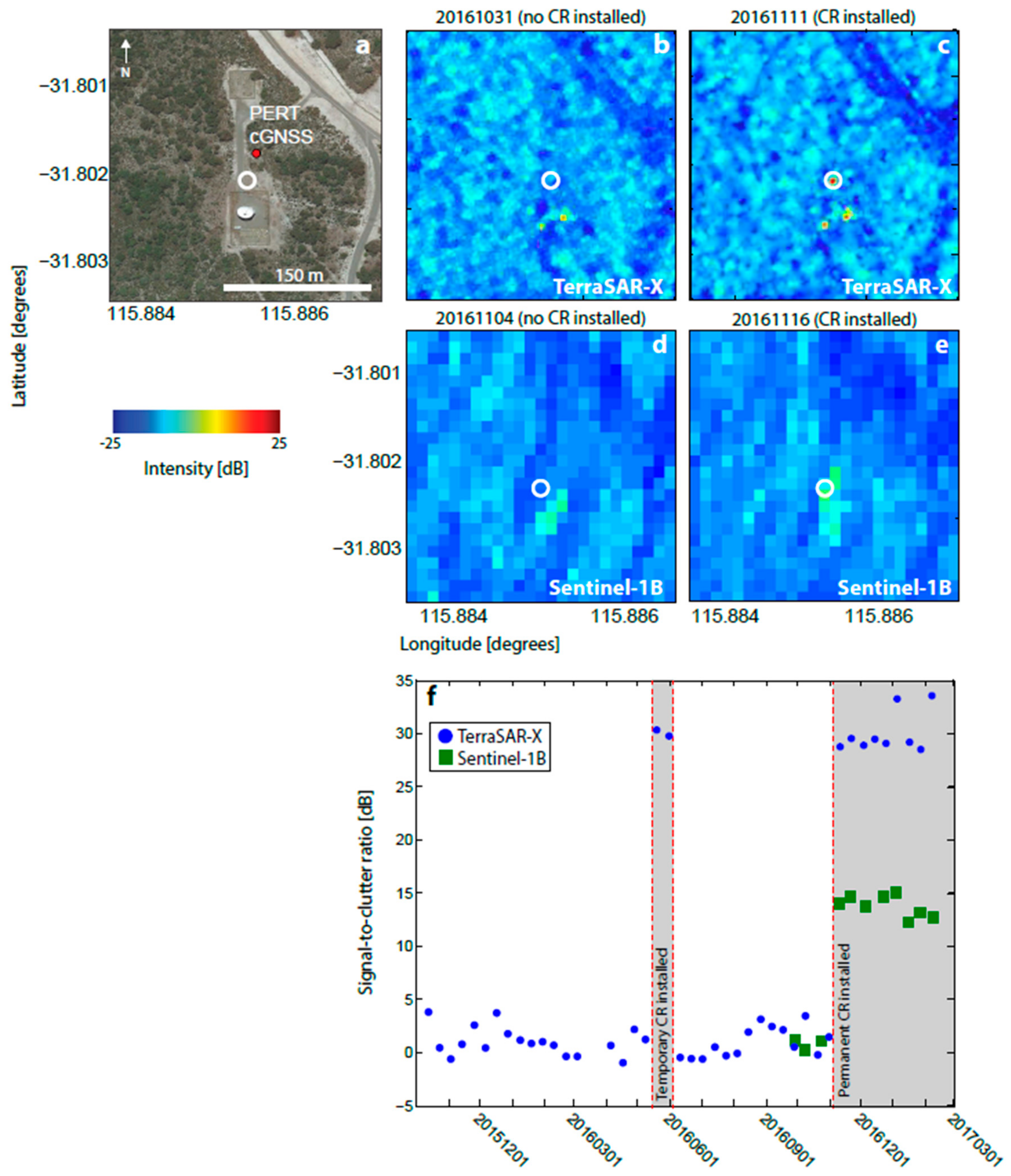
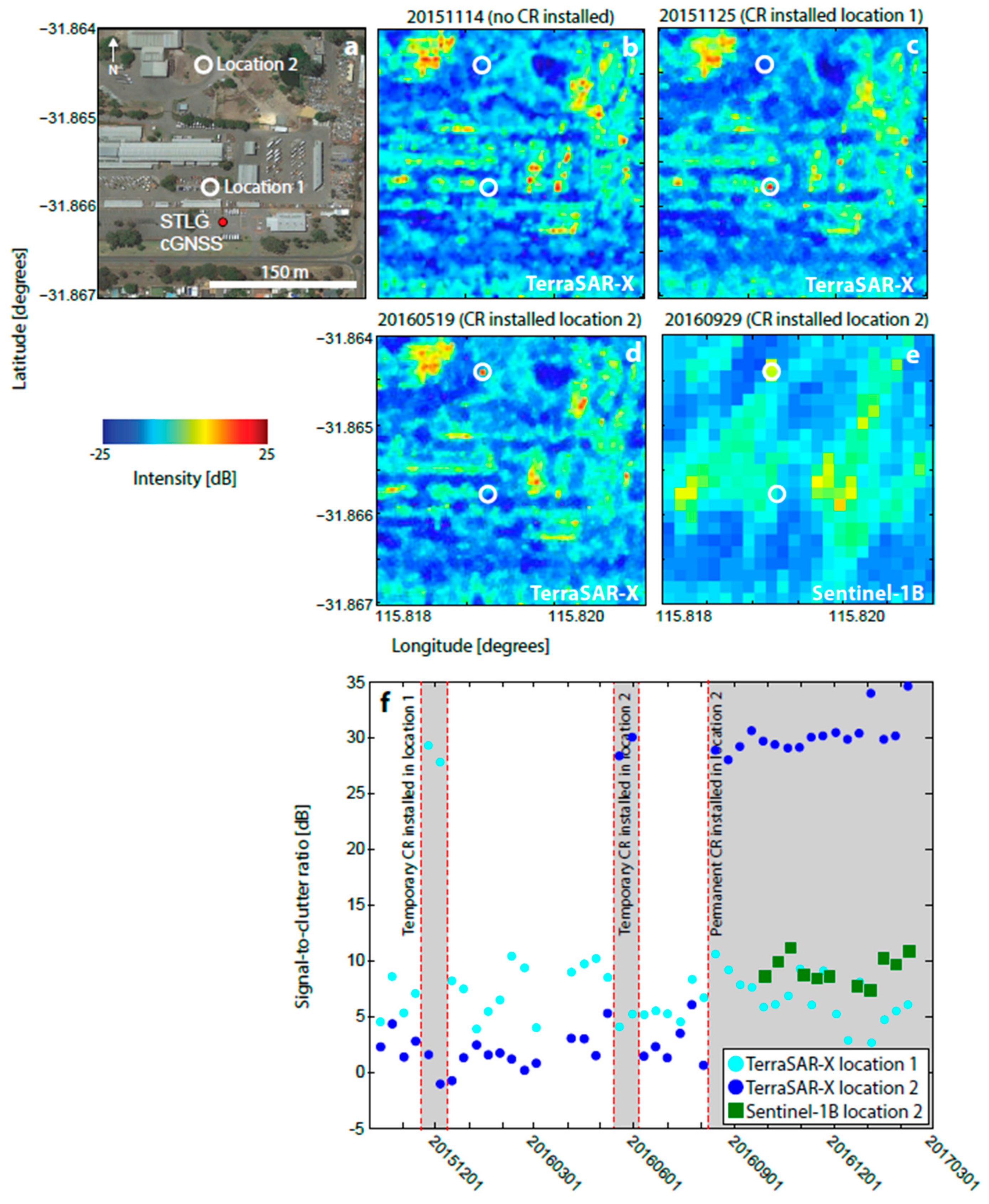
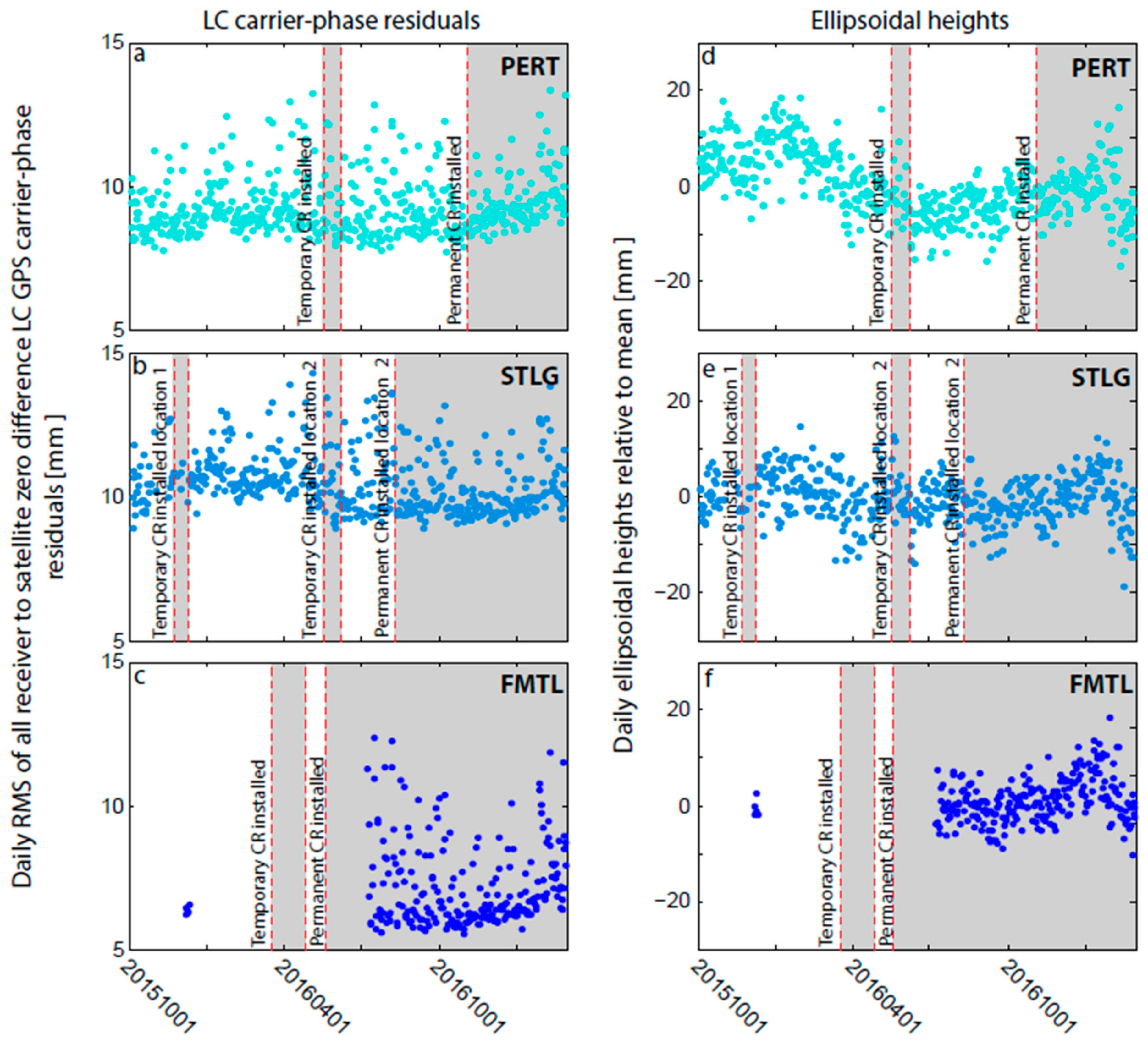
4.1. New CRs at Existing cGNSS Sites: Perth and Stirling
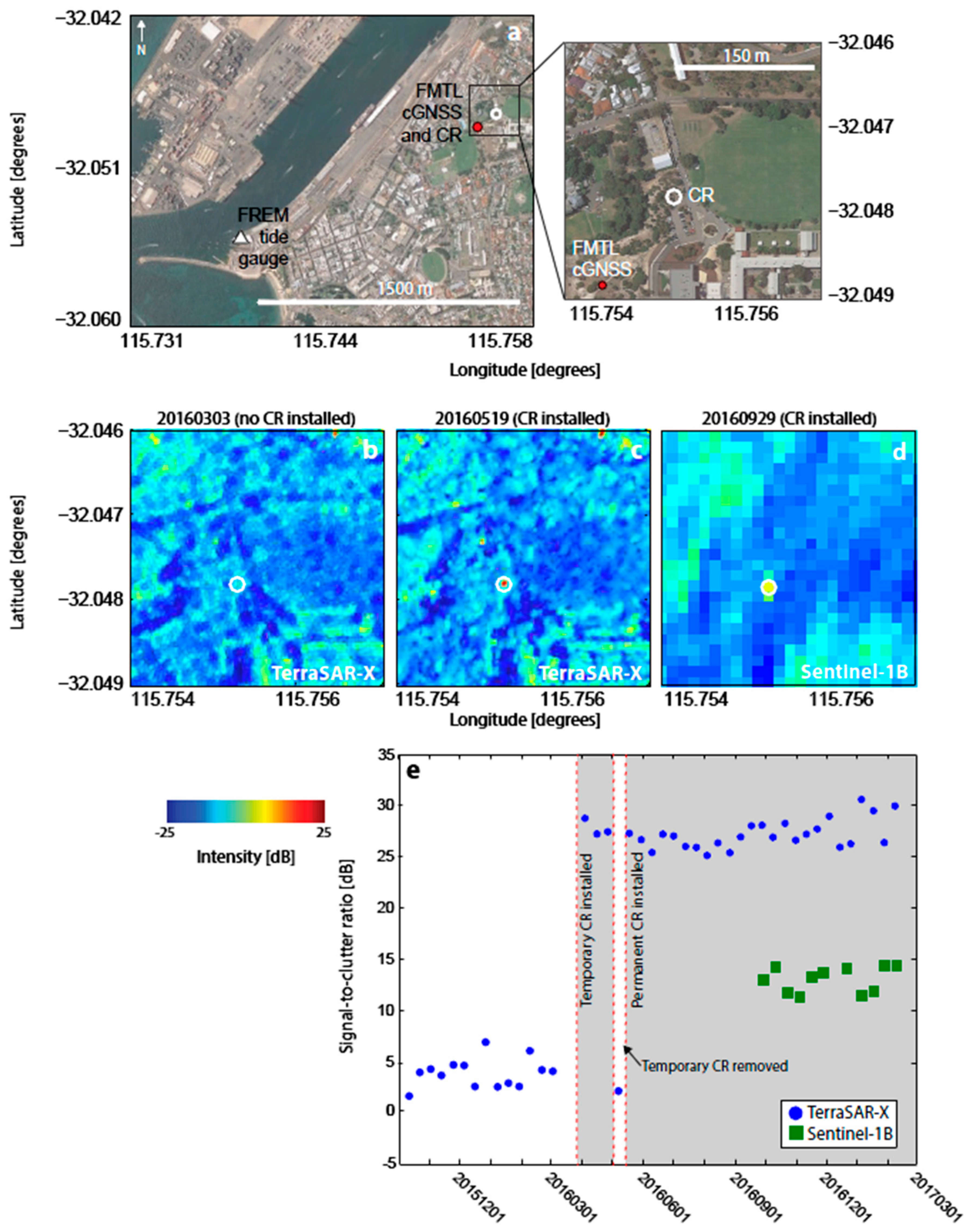
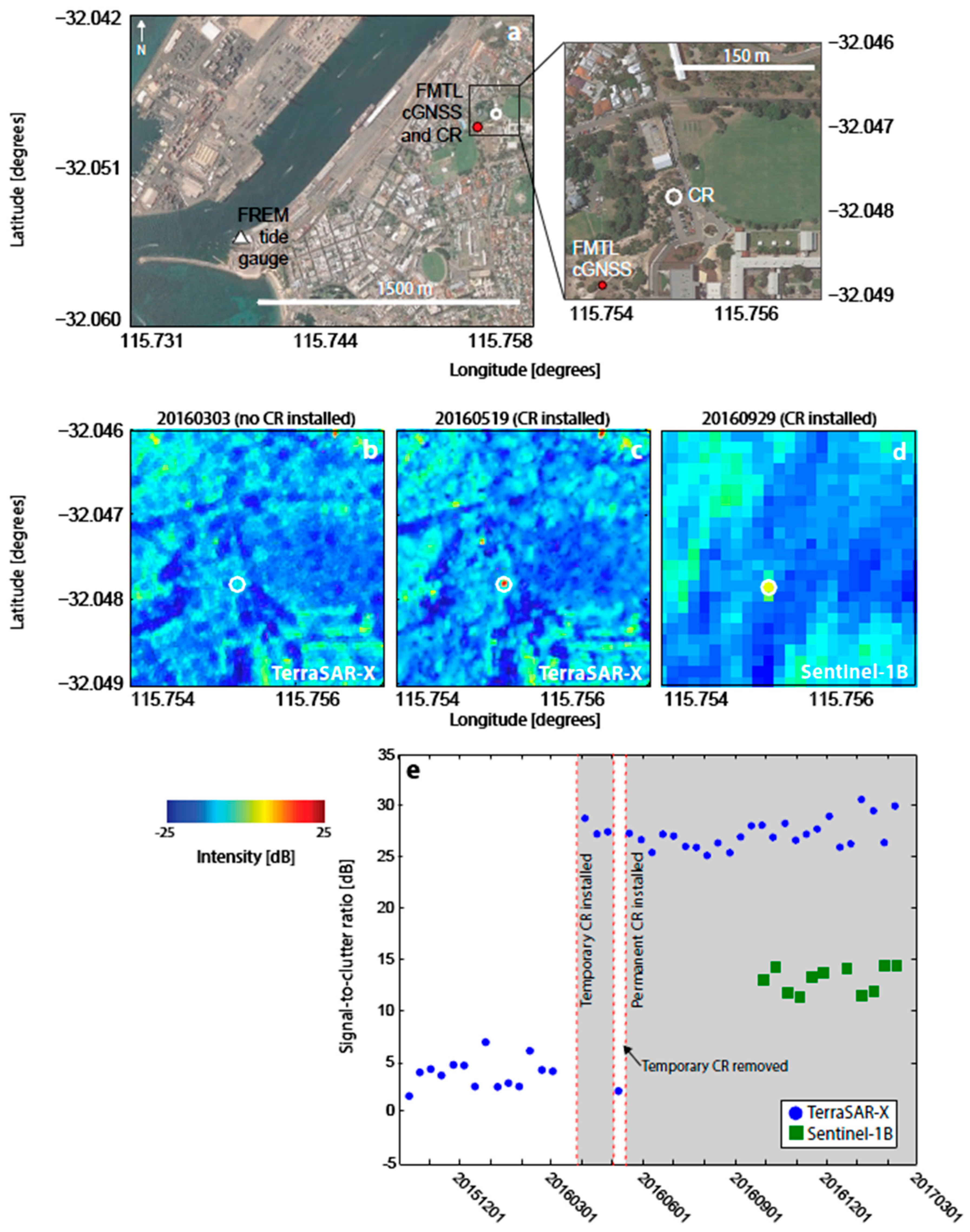
4.2. New Co-Located cGNSS and CR Site: Fremantle
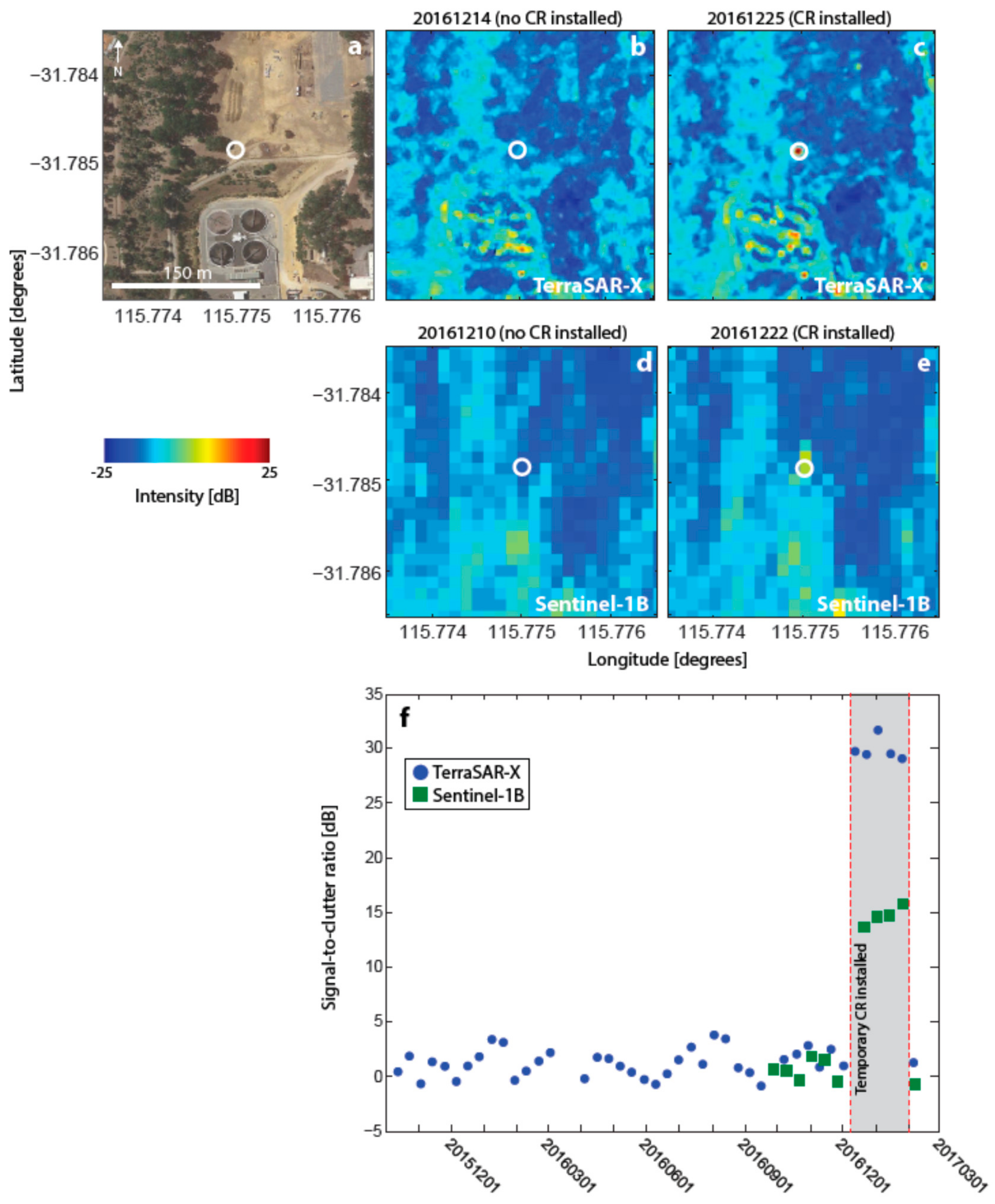
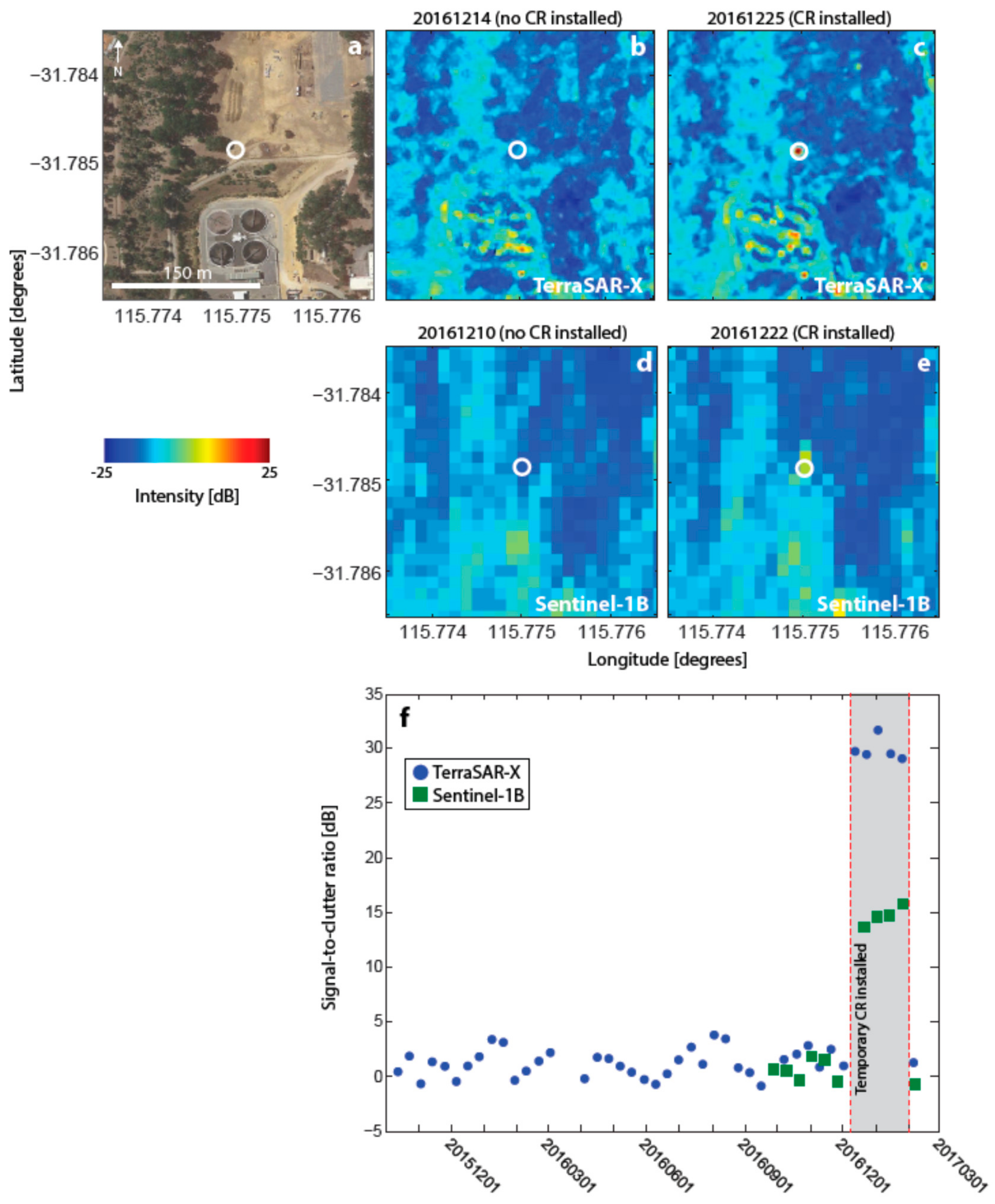
4.3. Proposed Co-Located cGNSS and CR Site: Beenyup
5. Discussion
5.1. Recommendations
5.2. Integrating InSAR and cGNSS to Determine VLM
5.3. Scope for Future Deployments
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Schöne, T.; Schön, N.; Thaller, D. IGS tide gauge benchmark monitoring pilot project (TIGA): Scientific benefits. J. Geod. 2009, 83, 249–261. [Google Scholar] [CrossRef]
- Bouin, M.N.; Wöppelmann, G. Land motion estimates from GPS at tide-gauges: A geophysical evaluation. Geophys. J. Int. 2010, 180, 193–209. [Google Scholar] [CrossRef]
- Bock, Y.; Melga, D. Physical applications of GPS geodesy: A review. Rep. Prog. Phys. 2016, 79, 106801. [Google Scholar] [CrossRef] [PubMed]
- Massonnet, D.; Feigl, K.L. Radar interferometry and its application to changes in the Earth’s surface. Rev. Geophys. 1998, 36, 441–500. [Google Scholar] [CrossRef]
- Bürgmann, R.; Rosen, P.A.; Fielding, E.J. Synthetic aperture radar interferometry to measure Earth’s surface topography and its deformation. Ann. Rev. Earth Planet. Sci. 2000, 28, 169–209. [Google Scholar] [CrossRef]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2001. [Google Scholar]
- Amelung, F.; Galloway, D.L.; Bell, J.W.; Zebker, H.A.; Laczniak, R.J. Sensing the ups and downs of Las Vegas: InSAR reveals structural control of land subsidence and aquifer-system deformation. Geology 1999, 27, 483–486. [Google Scholar] [CrossRef]
- Wright, T.J.; Parsons, B.E.; Lu, Z. Toward mapping surface deformation in three dimensions using InSAR. Geophys. Res. Lett. 2004, 31, L01607. [Google Scholar] [CrossRef]
- Gudmundsson, S.; Sigmundsson, F.; Carstensen, J.M. Three-dimensional surface motion maps estimated from combined interferometric synthetic aperture radar and GPS data. J. Geophys. Res. Solid Earth 2002, 107. [Google Scholar] [CrossRef]
- Bürgmann, R.; Hilley, G.; Ferretti, A.; Novali, F. Resolving vertical tectonics in the San Francisco Bay Area from permanent scatterer InSAR and GPS analysis. Geology 2006, 34, 221–224. [Google Scholar] [CrossRef]
- Legrand, J.; Bergeot, N.; Bruyninx, C.; Wöppelmann, G.; Bouin, M.N.; Altamimi, Z. Impact of regional reference frame definition on geodynamic interpretations. J. Geod. 2010, 49, 116–122. [Google Scholar] [CrossRef]
- Bevis, M.; Brown, A.; Kendrick, E. Devising stable geometrical reference frames for use in geodetic studies of vertical crustal motion. J. Geod. 2013, 87, 311–321. [Google Scholar] [CrossRef]
- Bevis, M.; Brown, A. Trajectory models and reference frames for crustal motion geodesy. J. Geod. 2014, 88, 283–311. [Google Scholar] [CrossRef]
- Griffiths, J.; Ray, J. Impacts of GNSS position offsets on global frame stability. Geophys. J. Int. 2016, 204, 480–487. [Google Scholar] [CrossRef]
- Finnegan, N.J.; Pritchard, M.E.; Lohman, R.B.; Lundgren, P.R. Constraints on surface deformation in the Seattle, WA, urban corridor from satellite radar interferometry time-series analysis. Geophys. J. Int. 2008, 174, 29–41. [Google Scholar] [CrossRef]
- Schmidt, D.A.; Bürgmann, R. Time-dependent land uplift and subsidence in the Santa Clara valley, California, from a large interferometric synthetic aperture radar data set. J. Geophys. Res. Solid Earth 2003, 108, 2416. [Google Scholar] [CrossRef]
- Parker, A.L.; Biggs, J.; Lu, Z. Time-scale and mechanism of subsidence at Lassen Volcanic Center, CA, from InSAR. J. Volc. Geotherm. Res. 2016, 320, 117–127. [Google Scholar] [CrossRef]
- Bock, Y.; Wdowinski, S.; Ferretti, A.; Novali, F.; Fumagalli, A. Recent subsidence of the Venice Lagoon from continuous GPS and interferometric synthetic aperture radar. Geochem. Geophys. Geosyst. 2012, 13, Q03023. [Google Scholar] [CrossRef]
- Dheenathayalan, P.; Small, D.; Schubert, A.; Hanssen, R.F. High-precision positioning of radar scatterers. J. Geod. 2016, 90, 403–422. [Google Scholar] [CrossRef]
- Gisinger, C.; Willberg, M.; Balss, U.; Klügel, T.; Mähler, S.; Pail, R.; Eineder, M. Differential geodetic stereo SAR with TerraSAR-X by exploiting small multi-directional radar reflectors. J. Geod. 2017, 91, 53–67. [Google Scholar] [CrossRef]
- Ferretti, A.; Savio, G.; Barzaghi, R.; Borghi, A.; Musazzi, S.; Novali, F.; Prati, C.; Rocca, F. Submillimeter accuracy of InSAR time series: Experimental validation. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1142–1153. [Google Scholar] [CrossRef]
- Wöppelmann, G.; Le Cozannet, G.; de Michele, M.; Raucoules, D.; Cazenave, A.; Garcin, M.; Hanson, S.; Marcos, M.; Santamaría-Gómez, A. Is land subsidence increasing the exposure to sea level rise in Alexandria, Egypt? Geophys. Res. Lett. 2013, 40, 2953–2957. [Google Scholar] [CrossRef] [Green Version]
- Raucoules, D.; Le Cozannet, G.; Wöppelmann, G.; de Michele, M.; Gravelle, M.; Daag, A.; Marcos, M. High nonlinear urban ground motion in Manila (Philippines) from 1993 to 2010 observed by DInSAR: Implications for sea-level measurement. Remote Sens. Environ. 2013, 139, 386–397. [Google Scholar] [CrossRef]
- Teatini, P.; Tosi, L.; Strozzi, T.; Carbognin, L.; Wegmuller, U.; Rizzetto, F. Mapping regional land displacements in the Venice coastland by an integrated monitoring system. Remote Sens. Environ. 2005, 98, 403–413. [Google Scholar] [CrossRef]
- Hung, W.-C.; Hwang, C.; Chen, Y.-A.; Chang, C.-P.; Yen, J.-Y.; Hooper, A.; Yang, C.-Y. Surface deformation from persistent scatterers SAR interferometry and fusion with leveling data: A case study over the Choushui River alluvial fan, Taiwan. Remote Sens. Environ. 2011, 115, 957–967. [Google Scholar] [CrossRef]
- Gray, A.L.; Vachon, P.W.; Livingstone, C.E.; Lukowski, T.I. Synthetic aperture radar calibration using reference reflectors. IEEE Trans. Geosci. Remote Sens. 1990, 28, 374–383. [Google Scholar] [CrossRef]
- Xia, Y.; Kaufmann, H.; Guo, X.F. Landslide monitoring in the Three Gorges area using D-InSAR and corner reflectors. Photogramm. Eng. Remote Sens. 2004, 70, 1167–1172. [Google Scholar] [CrossRef]
- Xia, Y. CR-based SAR-interferometry for landslide monitoring. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008; pp. II-1239–1242. [Google Scholar]
- Froese, C.; Poncos, V.; Skirrow, R.; Mansour, M.; Martin, D. Characterizing complex deep seated landslide deformation using corner reflector InSAR (CR-INSAR): Little Smoky Landslide, Alberta. In Proceedings of the 4th Canadian Conference on Geohazards, Dartmouth, NS, Canada, 20–24 May 2008; pp. 1–4. [Google Scholar]
- Strozzi, T.; Teatini, P.; Tosi, L.; Wegmüller, U.; Werner, C. Land subsidence of natural transitional environments by satellite radar interferometry on artificial reflectors. J. Geophys. Res. Earth Surf. 2013, 118, 1177–1191. [Google Scholar] [CrossRef]
- Qin, Y.; Perissin, D.; Lei, L. The design and experiments on corner reflectors for urban ground deformation monitoring in Hong Kong. Int. J. Antenn. Propag. 2013, 2013. [Google Scholar] [CrossRef]
- Crosetto, M.; Gili, J.A.; Monserrat, O.; Cuevas-Gonzalez, M.; Corominas, J.; Serral, D. Interferometric SAR monitoring of the Vallcebre landslide (Spain) using corner reflectors. Nat. Hazards. Earth Syst. 2013, 13, 923–933. [Google Scholar] [CrossRef]
- Singleton, A.; Li, Z.; Hoey, T.; Muller, J.-P. Evaluating sub-pixel offset techniques as an alternative to DInSAR for monitoring episodic landslide movements in vegetated terrain. Remote Sens. Environ. 2014, 147, 133–144. [Google Scholar] [CrossRef]
- Fu, W.; Guo, H.; Tian, Q.; Guo, X. Landslide monitoring by corner reflectors differential interferometry SAR. Int. J. Remote Sens. 2010, 31, 6387–6400. [Google Scholar] [CrossRef]
- Garthwaite, M.C.; Hazelwood, M.; Nancarrow, S.; Hislop, A.; Dawson, J.H. A regional geodetic network to monitor ground surface response to resource extraction in the northern Surat Basin, Queensland. Aust. J. Earth Sci. 2015, 62, 469–477. [Google Scholar] [CrossRef]
- Marinkovic, P.; Larsen, Y.; Levinsen, J.F.; Broge, N.H.; Sørensen, C.S.; Dehls, J. Something is “subsiding” in the state of Denmark-Operational prospects for nationwide subsidence mapping with Sentinel-1. In Proceedings of the ESA Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Levinsen, J.F.; Broge, N.H.; Sørensen, C.S. Approaching target: A service for nationwide deformation monitoring in Denmark using Sentinel-1. In Proceedings of the Fringe 2017 10th International Workshop on Advances in the Science and Applications of SAR Interferometry and Sentinel-1 InSAR, Helsinki, Finland, 5–9 June 2017. [Google Scholar]
- Oyen, A. Towards an InSAR based nationwide monitoring strategy in the Netherlands. In Proceedings of the Fringe 2017 10th International Workshop on Advances in the Science and Applications of SAR Interferometry and Sentinel-1 InSAR, Helsinki, Finland, 5–9 June 2017. [Google Scholar]
- Featherstone, W.E.; Filmer, M.S.; Penna, N.T.; Morgan, L.M.; Schenk, A. Anthropogenic land subsidence in the Perth Basin: Challenges for its retrospective geodetic detection. J. R. Soc. West. Aust. 2012, 95, 53–62. [Google Scholar]
- Featherstone, W.E.; Penna, N.T.; Filmer, M.S.; Williams, S.D.P. Nonlinear subsidence at Fremantle, a long-recording tide gauge in the Southern Hemisphere. J. Geophys. Res. Oceans 2015, 120, 7004–7014. [Google Scholar] [CrossRef]
- Parker, A.L.; Filmer, M.S.; Featherstone, W.E. First results from Sentinel-1A InSAR over Australia: Application to the Perth Basin. Remote Sens. 2017, 9, 299. [Google Scholar] [CrossRef]
- Werninghaus, R.; Buckreuss, S. The TerraSAR-X mission and system design. IEEE Trans. Geosci. Remote Sens. 2010, 48, 606–614. [Google Scholar] [CrossRef] [Green Version]
- Torres, R.; Snoeij, P.; Geudtner, D.; Bibby, D.; Davidson, M.; Attema, E.; Potin, P.; Rommen, B.; Floury, N.; Brown, M.; et al. GMES Sentinel-1 mission. Remote Sens. Environ. 2012, 120, 9–24. [Google Scholar] [CrossRef]
- Garthwaite, M.C. On the design of radar corner reflectors for deformation monitoring in multi-frequency InSAR. Remote Sens. 2017, 9, 648. [Google Scholar] [CrossRef]
- Dow, J.M.; Neilan, R.E.; Rizos, C. The international GNSS Service in a changing landscape of Global Navigation Satellite Systems. J. Geod. 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Mahapatra, P.; van der Marel, H.; van Leijen, F.; Samiei-Esfahany, S.; Klees, R.; Hanssen, R. InSAR datum connection using GNSS-augmented radar transponders. J. Geod. 2017, 1–12. [Google Scholar] [CrossRef]
- Current IGS Site Guidelines. Available online: http://kb.igs.org/hc/en-us/articles/202011433-Current-IGS-Site-Guidelines (accessed on 17 June 2017).
- Guideline for Continuously Operating Reference Stations Special Publication 1. Available online: http://www.icsm.gov.au/publications/sp1/Guideline-for-Continuously-Operating-Reference-Stations_v2.1.pdf (accessed on 17 June 2017).
- Park, K.-D.; Nerem, R.S.; Schenewerk, M.S.; Davis, J.L. Site-specific multipath characteristics of global IGS and CORS GPS sites. J. Geod. 2004, 77, 799–803. [Google Scholar] [CrossRef]
- King, M.A.; Watson, C.S. Long GPS coordinate time series: Multipath and geometry effects. J. Geophys. Res. Solid Earth 2010, 115, B04403. [Google Scholar] [CrossRef]
- Fuhrmann, T.; Luo, X.; Knöpfler, A.; Mayer, M. Generating statistically robust multipath stacking maps using congruent cells. GPS Solut. 2015, 19, 83–92. [Google Scholar] [CrossRef]
- Atkins, C.; Ziebart, M. Effectiveness of observation-domain sidereal filtering for GPS precise point positioning. GPS Solut. 2016, 20, 111–122. [Google Scholar] [CrossRef]
- Standards and Practices for Control Surveys V1.7. Special Publication 1; Inter-Governmental Committee on Surveying and Mapping, Geoscience Australia: Canberra, Australia. Available online: http://www.icsm.gov.au/publications/sp1/sp1v1-7.pdf (accessed on 31 July 2017).
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS Conventions; Verlag des Bundesamts für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010; ISBN 3-89888-989-6.
- Boehm, J.; Werl, B.; Schuh, H. Troposphere mapping functions for GPS and very long baseline interferometry from European Centre for Medium-Range Weather Forecasts operational analysis data. J. Geophys. Res. Solid Earth 2006, 111, B02406. [Google Scholar] [CrossRef]
- Amos, C.B.; Audet, P.; Hammond, W.C.; Burgmann, R.; Johanson, I.A.; Blewitt, G. Uplift and seismicity driven by groundwater depletion in central California. Nature 2014, 509, 483–486. [Google Scholar] [CrossRef] [PubMed]
- Hammond, W.H.; Blewitt, G.; Kreemer, C. GPS imaging of vertical land motion in California and Nevada: Implications for Sierra Nevada uplift. J. Geophys. Res. Solid Earth 2016, 121, 7681–7703. [Google Scholar] [CrossRef] [PubMed]
- Devoti, R.; D’Agostino, N.; Serpelloni, E.; Pietrantonio, G.; Riguzzi, F.; Avallone, A.; Cavaliere, A.; Cheloni, D.; Cecere, G.; D’Ambrosio, C.; et al. A combined velocity field of the Mediterranean region. Ann. Geophys. 2017, 60, S0215. [Google Scholar] [CrossRef]
- Systems Tool Kit. Available online: http://www.agi.com/products/stk/ (accessed on 17 June 2017).
- Garthwaite, M.C.; Nancarrow, S.; Hislop, A.; Thankappan, A.; Dawson, J.H.; Lawrie, S. The Design of Radar Corner Reflectors for the Australian Geophysical Observing System; Geoscience Australia: Canberra, Australia, 2015. Available online: https://d28rz98at9flks.cloudfront.net/82751/Rec2015_003.pdf (accessed on 29 July 2017).
- Freeman, A. SAR calibration: An overview. IEEE Trans. Geosci. Remote Sens. 1992, 30, 1107–1121. [Google Scholar] [CrossRef]
- Bevis, M.; Scherer, W.; Merrifield, M. Technical issues and recommendations related to the installation of continuous GPS stations at tide gauges. Mar. Geod. 2002, 25, 87–99. [Google Scholar] [CrossRef]
- Shirzaei, M.; Ellsworth, W.L.; Tiampo, K.F.; González, P.J.; Manga, M. Surface uplift and time-dependent seismic hazard due to fluid injection in eastern Texas. Science 2016, 353, 1416–1419. [Google Scholar] [CrossRef] [PubMed]
- Muller, C.; del Potro, R.; Biggs, J.; Gottsmann, J.; Ebmeier, S.K.; Guillaume, S.; Cattin, P.-H.; van der Laat, R. Integrated velocity field from ground and satellite geodetic techniques: Application to Arenal volcano. Geophys. J. Int. 2014, 200, 863–879. [Google Scholar] [CrossRef]
- Blewitt, G.; Lavallée, D. Effect of annual signals on geodetic velocity. J. Geophys. Res. Solid Earth 2002, 107, 2156–2202. [Google Scholar] [CrossRef]
- He, X.; Montillet, J.-P.; Fernandes, R.; Bos, M.; Yu, K.; Hua, X.; Jiang, W. Review of current GPS methodologies for producing accurate time series and their error sources. J. Geodyn. 2017, 106, 12–29. [Google Scholar] [CrossRef]
- Gazeaux, J.; Williams, S.; King, M.; Bos, M.; Dach, R.; Deo, M.; Moore, A.W.; Ostini, L.; Petrie, E.; Roggero, M.; et al. Detecting offsets in GPS time series: First results from the detection of offsets in GPS experiment. J. Geophys. Res. Solid Earth 2013, 118, 2397–2407. [Google Scholar] [CrossRef] [Green Version]
- Santamaría-Gomez, A.; Mémin, A. Geodetic secular velocity errors due to interannual surface loading deformation. Geophys. J. Int. 2015, 202, 763–767. [Google Scholar] [CrossRef]
- Serpelloni, E.; Faccenna, C.; Spada, G.; Dong, D.; Williams, S.P.D. Vertical GPS ground motion rates in the Euro-Mediterranean region: New evidence of velocity gradients at different spatial scales along the Nubia-Eurasia plate boundary. J. Geophys. Res. Solid Earth 2013, 118, 6003–6024. [Google Scholar] [CrossRef] [Green Version]
- Bos, M.; Bastos, L.; Fernandes, R.M.S. The influence of seasonal signals on the estimation of the tectonic motion in short continuous GPS time-series. J. Geodyn. 2010, 49, 205–209. [Google Scholar] [CrossRef]
- Emardson, T.R.; Simons, M.; Webb, F.H. Neutral atmospheric delay in interferometric synthetic aperture radar applications: Statistical description and mitigation. J. Geophys. Res. Solid Earth 2003, 108, 2231. [Google Scholar] [CrossRef]
- Parker, A.L.; Biggs, J.; Walters, R.J.; Ebmeier, S.K.; Wright, T.J.; Teanby, N.J.; Lu, Z. Systematic assessment of atmospheric uncertainties for InSAR data at volcanic arcs using large-scale atmospheric models: Application to the Cascade volcanoes, United States. Remote Sens. Environ. 2015, 170, 102–114. [Google Scholar] [CrossRef]
- Zerbini, S.; Richter, B.; Rocca, F.; van Dam, T.; Matonti, F. A Combination of space and terrestrial geodetic techniques to monitor land subsidence: Case Study, the southeastern Po Plain, Italy. J. Geophys. Res. Solid Earth 2007, 112, B05401. [Google Scholar] [CrossRef]
- Papoutsis, I.; Papanikolaou, X.; Floyd, M.; Ji, K.H.; Kontoes, C.; Paradissis, D.; Zacharis, V. Mapping inflation at Santorini volcano, Greece, using GPS and InSAR. Geophys. Res. Lett. 2013, 40, 267–272. [Google Scholar] [CrossRef]
- Moritz, H. Advanced Physical Geodesy; Abacus Press: Kent, UK, 1980. [Google Scholar]
- Wei, M.; Sandwell, D.; Smith-Konter, B. Optimal combination of InSAR and GPS for measuring interseismic crustal deformation. Adv. Space Res. 2010, 46, 236–249. [Google Scholar] [CrossRef]
- Fuhrmann, T.; Caro Cuenca, M.; Knöpfler, A.; van Leijan, F.J.; Mayer, M.; Westerhaus, M.; Hanssen, R.F.; Heck, B. Estimation of small surface displacements in the Upper Rhine Graben area from a combined analysis of PS-InSAR, levelling and GNSS data. Geophys. J. Int. 2015, 203, 614–631. [Google Scholar] [CrossRef]
- Brown, N.J.; Woods, A.W.; Neufeld, J.A.; Richardson, C. Constraining Surface Deformation Predictions Resulting from Coal Seam Gas Extraction; Geoscience Australia: Canberra, Australia, 2014. Available online: https://d28rz98at9flks.cloudfront.net/75663/Rec2014_044.pdf (accessed on 29 July 2017).
- Mahapatra, P.S.; Samiei-Esfahany, S.; Hanssen, R.F. Geodetic network design for InSAR. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3669–3680. [Google Scholar] [CrossRef]
- Mahapatra, P.; Samiei-Esfahany, S.; van der Marel, H.; Hanssen, R. On the use of transponders as coherent radar targets for SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1869–1878. [Google Scholar] [CrossRef]
- Willis, P.; Fagard, H.; Ferrage, P.; Lemoine, F.G.; Noll, C.E.; Noomen, R.; Otten, M.; Ries, J.C.; Rothacher, M.; Soudarin, L.; et al. The International DORIS Service: Toward maturity. Adv. Space Res. 2010, 45, 1408–1420. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Type | Local Operator | Monument | Receiver Type | Antenna Type | Longitude | Latitude |
|---|---|---|---|---|---|---|---|
| PERT | Existing (scientific) | GA | Deep-seated pillar | Trimble NetR9 | TRM59800.00 NONE | 115.885 | −31.802 |
| STLG | Existing (commercial) | RTKNetWest | Deep-seated pillar | Trimble NetR9 | TRM55971.00 NONE | 115.819 | −31.866 |
| FMTL | New (scientific) | Curtin University | Deep-seated pillar | Trimble NetR9 | TRM59800.00 NONE | 115.755 | −32.049 |
| HIL1 | Existing (scientific) | GA | On tide gauge | Leica GRX1200GGPRO | ASH701945C_M NONE | 115.739 | −31.826 |
| Site | cGNSS Status | Test CR Deployment | Permanent CR Deployment | ||
|---|---|---|---|---|---|
| Dates | SAR Data Available | Date | SAR Data Available | ||
| PERT | Existing (installed 18 August 1993) | 18 May–8 June 2016 | TSX | 3 November 2016 | TSX Sentinel-1B |
| STLG | Existing (installed 1 October 2012) | Location 1: 23 November–10 December 2015 | TSX | - | - |
| Location 2: 18 May–8 June 2016 | TSX | 10 August 2016 | TSX (Sentinel-1B ~45 days after installation) | ||
| FMTL | Installed during this study Test installation (7–11 December 2015) Permanent installation (9 July 2016) | 18 March–27 April 2016 | TSX | 19 May 2016 | TSX (Sentinel-1B ~135 days after installation) |
| BEEN | Proposed/awaiting construction Test installation (12–15 December 2016) | 12 December 2016–27 January 2017 | TSX Sentinel-1B | - | - |
| Site | Test CR Installation | Permanent CR Installation | ||||
|---|---|---|---|---|---|---|
| Before | During | After | Before | After | ||
| PERT | Height (m) | 12.670 | 12.668 | 12.664 | 12.671 | 12.667 |
| LC residual (mm) | 9.6 | 9.3 | 9.0 | 8.6 | 8.9 | |
| STLG location 1 | Height (m) | −0.021 | −0.019 | −0.019 | - | - |
| LC residual (mm) | 10.3 | 10.6 | 10.6 | - | - | |
| STLG location 2 | Height (m) | −0.019 | −0.019 | −0.023 | −0.021 | −0.021 |
| LC residual (mm) | 10.8 | 10.5 | 10.3 | 10.8 | 10.3 | |
| Site | 5 Days | 10 Days | 20 Days | 40 Days | ||||
|---|---|---|---|---|---|---|---|---|
| Before | After | Before | After | Before | After | Before | After | |
| PERT | 8.5 | 8.5 | 8.5 | 8.7 | 8.6 | 8.9 | 9.0 | 9.1 |
| STLG location 2 | 11.9 | 9.9 | 11.0 | 10.2 | 10.8 | 10.6 | 10.7 | 10.1 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Parker, A.L.; Featherstone, W.E.; Penna, N.T.; Filmer, M.S.; Garthwaite, M.C. Practical Considerations before Installing Ground-Based Geodetic Infrastructure for Integrated InSAR and cGNSS Monitoring of Vertical Land Motion. Sensors 2017, 17, 1753. https://doi.org/10.3390/s17081753
Parker AL, Featherstone WE, Penna NT, Filmer MS, Garthwaite MC. Practical Considerations before Installing Ground-Based Geodetic Infrastructure for Integrated InSAR and cGNSS Monitoring of Vertical Land Motion. Sensors. 2017; 17(8):1753. https://doi.org/10.3390/s17081753
Chicago/Turabian StyleParker, Amy L., Will E. Featherstone, Nigel T. Penna, Mick S. Filmer, and Matthew C. Garthwaite. 2017. "Practical Considerations before Installing Ground-Based Geodetic Infrastructure for Integrated InSAR and cGNSS Monitoring of Vertical Land Motion" Sensors 17, no. 8: 1753. https://doi.org/10.3390/s17081753