In order to demonstrate the effects of sensor poisoning, we exposed SnO
2 gas sensors to HMDS passivation treatments, which is a specific form of sensor poisoning and which contributes to sensor drift. These sensor materials, which were produced at the University of Brescia, were deposited onto ceramic heater substrates with pre-deposited Pt backside heater meanders by the high-temperature vapor transportation and condensation technique [
33,
34,
35]. More details about the sensor preparation can be found in
Appendix A. In order to assess the effects of passivation, the sensors were exposed to sequences of test gas pulses both in the state before passivation and after different-length HMDS treatments. The passivation itself was performed by guiding streams of synthetic air (SA) at a rate of 50 sccm/min through a bubbler filled with liquid HMDS [
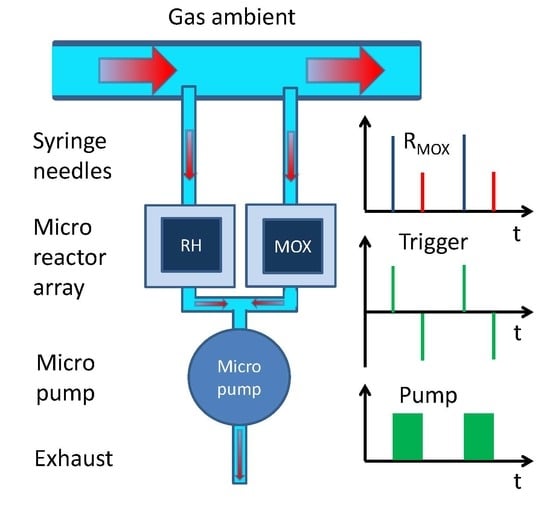
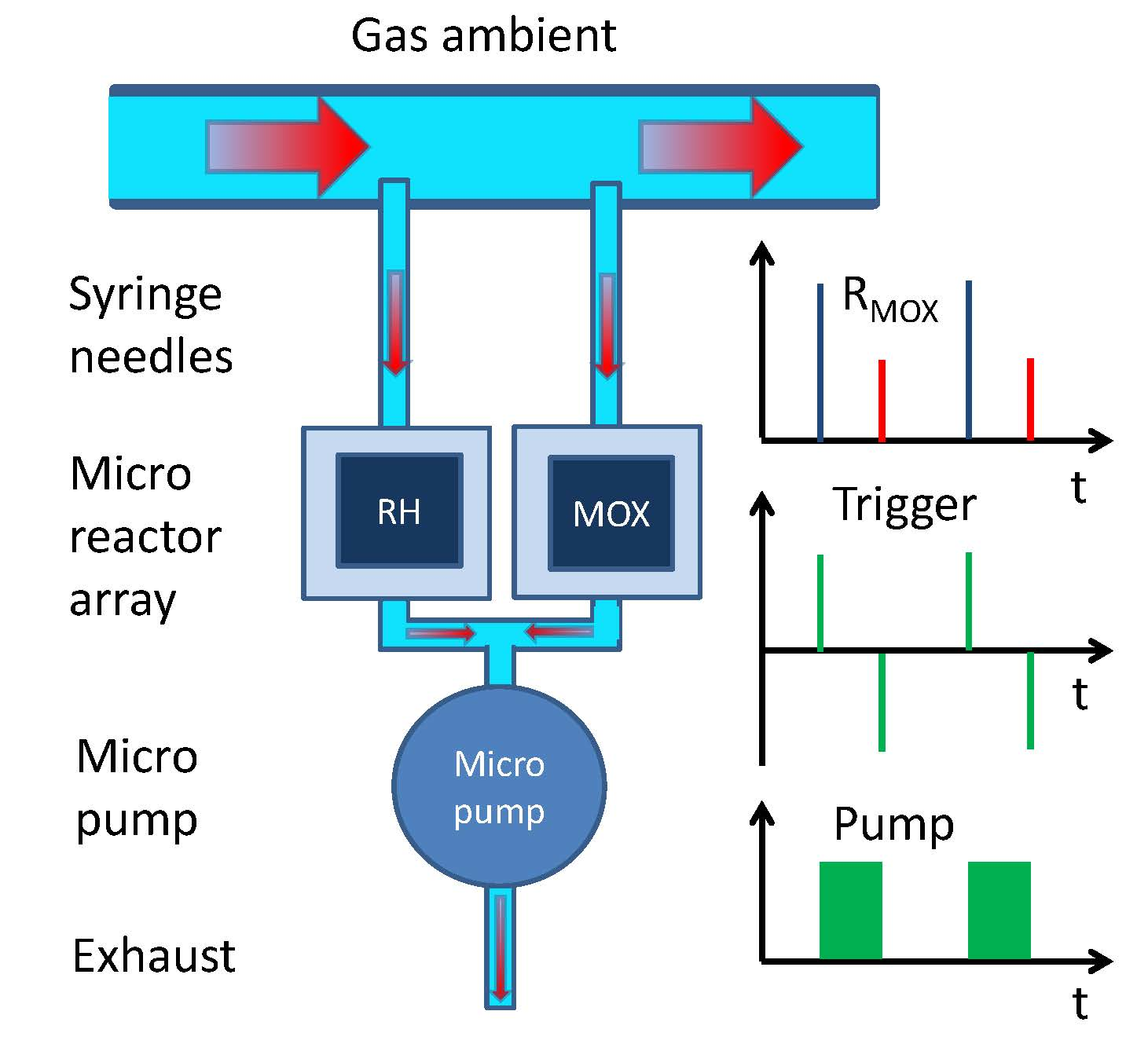
28]. The resulting HMDS vapors were then guided over the sensors for fixed amounts of time while being heated to their normal sensor operation temperature (
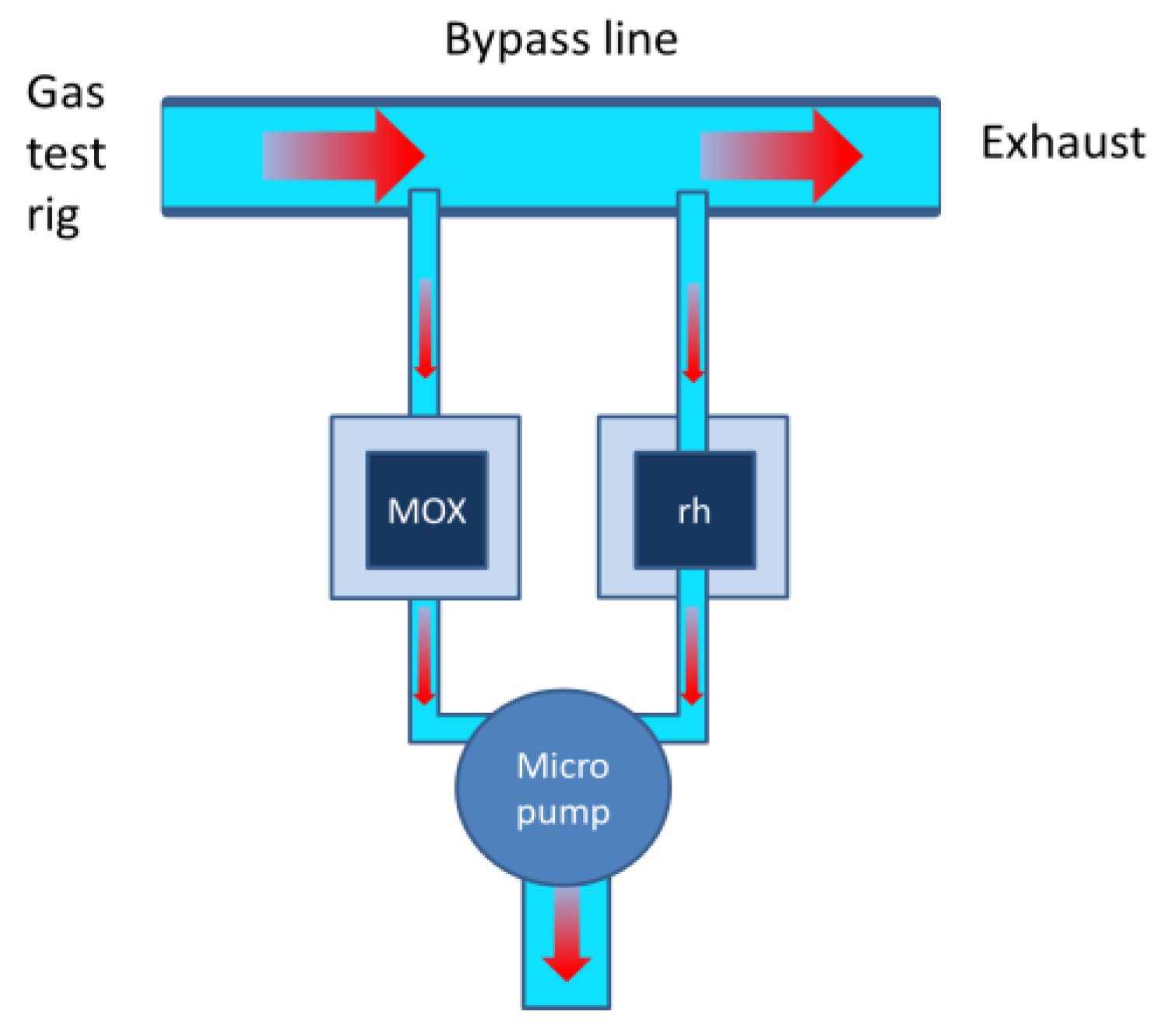
). Both sensor passivation and sensor performance assessments were performed at AIRBUS Innovation Works using a custom-designed gas test rig.
The results obtained in this way are shown in
Figure 1 and
Figure 2. The first figure shows scanning electron microscopy (SEM) images of the SnO
2 nanowire sensors both in their as-prepared states (
Figure 1a) and after HMDS passivation (
Figure 1b). A comparison of both images shows that HMDS passivation forms small particles of SiO
2 on top of the SnO
2 nanowires.
Figure 1b, in particular, shows that the ensuing HMDS deposits form overlayers with a granular morphology, which more and more restrict the access of reactive gases to the SnO
2 surfaces as HMDS treatment times are prolonged. Similar HMDS treatments performed on different kinds of commercial thick-film gas sensors consistently produced sensor resistance reductions as HMDS treatment times were prolonged. These reductions likely arise from the consumption of surface oxygen ions as HMDS adsorbates are converted into solid SiO
2 overlayers. As we consistently see resistance enhancements when HMDS treatments are applied to nanowire assemblies, a second and more dominant form of deterioration needs to be assumed. Likely this second deterioration process results from a reduction in the number of wire-to-wire contacts and concomitantly in a smaller number of conducting percolation paths through the nanowire assemblies.
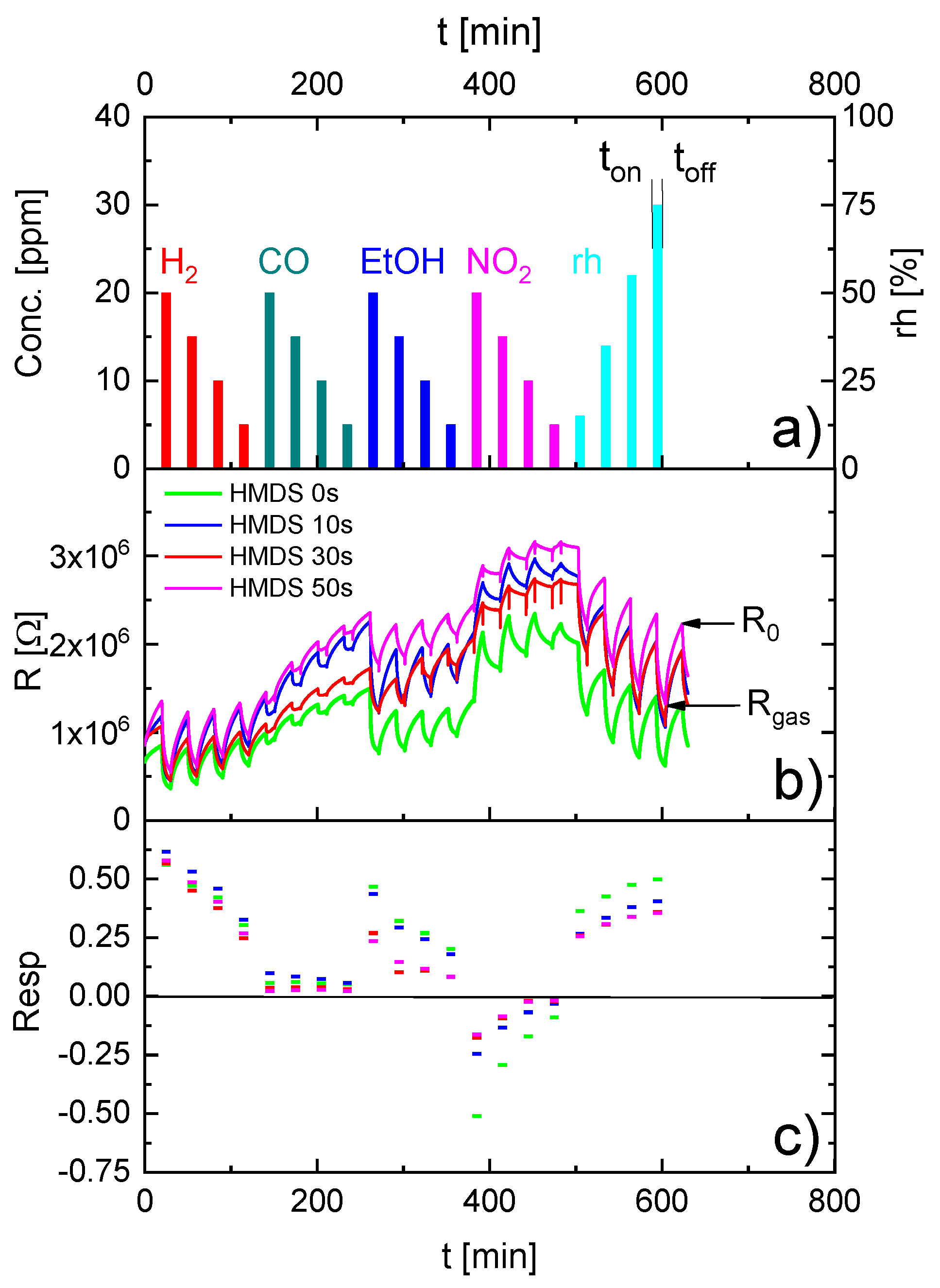
Figure 2 shows the results of gas measurements on one of these sensors after different degrees of HMDS passivation. The test gases for the assessment of the sensor performance were H
2, CO, ethanol (EtOH), NO
2 and water vapor at the concentrations given in
Figure 2a. The ensuing changes in sensor resistance are presented in
Figure 2b. One can observe that irrespective of the length of the HMDS treatments, the sensor continues to respond to all test gases. A brief look at the entirety of the data, however, clearly demonstrates that a certain value of sensor resistance
cannot be uniquely associated with the corresponding gas concentration. A closer look at this same data set reveals two important trends: (i) in data sets acquired at a constant level of HMDS passivation the sensor consistently drifts due to the fact it is not able to fully recover to baseline before any new gas exposure pulse is applied; (ii) comparing time series of sensor resistances acquired at different levels of HMDS passivation the same kind of resistance variation over time can be observed, however, with the average resistance level increasing after each passivation step.
Figure 2c shows the relative resistance responses
derived from the data of
Figure 2b. Comparing the
data to the test gas sequences in
Figure 2a, it can be seen that the
values scale in a much more consistent manner with the individual gas concentrations than the directly observed resistance values.
calculations, obviously, tend to remove the effects of concentration pile-ups, either on the sensor surface or in the sensor periphery, which occur when successive gas exposure pulses are applied before the sensor has been able to fully recover to baseline again. As a second effect the data in
Figure 2c also vividly demonstrate that the process of
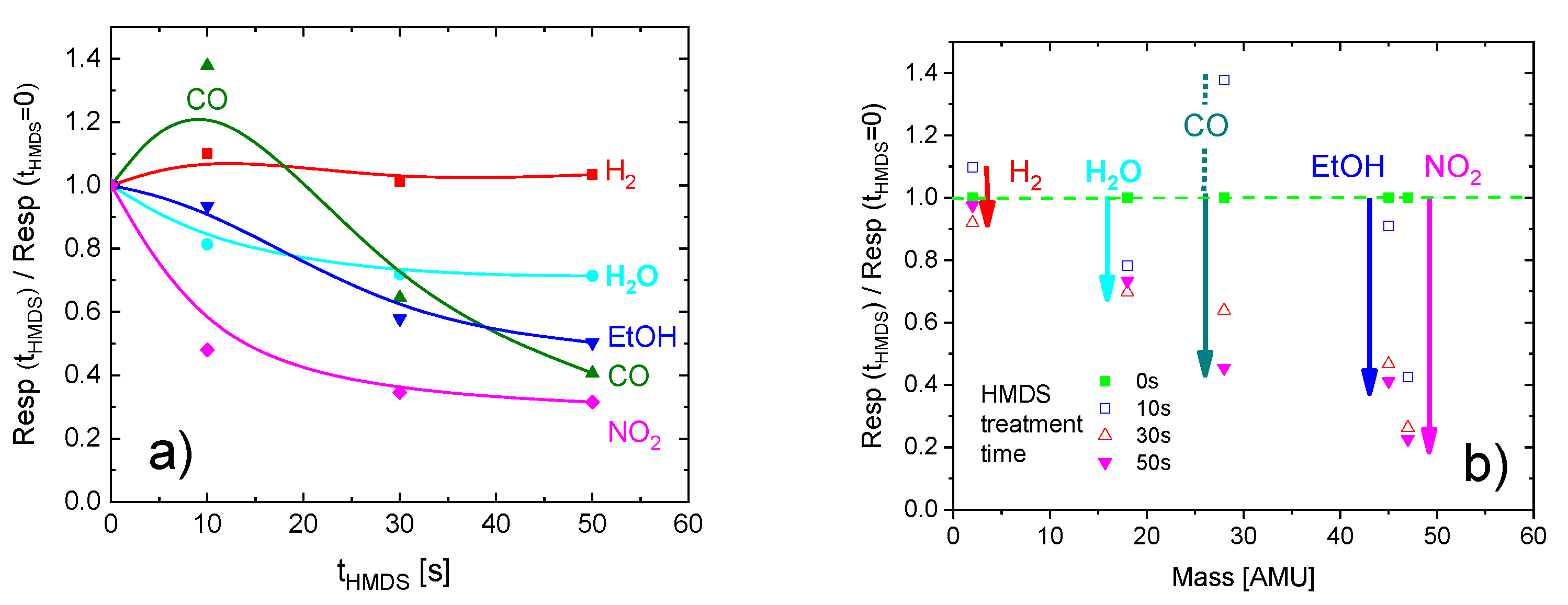
calculation does not remove the effects of sensor passivation. After some molecule-specific start-up effects, the
values of all gases do decrease as HMDS treatment times are prolonged. This is particularly the case when relatively massive analytes such as CO, EtOH or NO
2 are considered. H
2, in contrast is hardly affected by the effects of passivation. H
2O with its moderate molecular mass is in between the extremes of H
2 and EtOH or NO
2, respectively. As the H
2O response is sensitive to the passivation and as H
2O vapor is present in large and largely variable concentrations in practically every application environment, H
2O is a potentially very useful and freely available reference gas.
Summarizing, this first set of measurements shows that signatures of sensor drift and sensor poisoning are changes in the baseline resistance , in the magnitude of the gas-induced resistance change , and in the relative resistance response . Working towards MOX gas sensor systems with built-in self-test functionalities our focus in the following is on showing how these features can be detected and how their validity can be controlled under typical field conditions.
 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}