Systematic Analysis of a Military Wearable Device Based on a Multi-Level Fusion Framework: Research Directions

1
School of Computer Science and Engineering, Northeastern University, Shenyang 110169, China
2
School of Information Science and Engineering, Shenyang University of Technology, Shenyang 110870, China
3
College of Computer Science and Technology, Shenyang University of Chemical Technology, Shenyang 110142, China
*
Authors to whom correspondence should be addressed.
Sensors 2019, 19(12), 2651; https://doi.org/10.3390/s19122651
Submission received: 10 May 2019
/
Revised: 28 May 2019
/
Accepted: 10 June 2019
/
Published: 12 June 2019
(This article belongs to the Special Issue Applications and Innovations on Sensor-Enabled Wearable Devices)
Abstract
:With the development of the Internet of Battlefield Things (IoBT), soldiers have become key nodes of information collection and resource control on the battlefield. It has become a trend to develop wearable devices with diverse functions for the military. However, although densely deployed wearable sensors provide a platform for comprehensively monitoring the status of soldiers, wearable technology based on multi-source fusion lacks a generalized research system to highlight the advantages of heterogeneous sensor networks and information fusion. Therefore, this paper proposes a multi-level fusion framework (MLFF) based on Body Sensor Networks (BSNs) of soldiers, and describes a model of the deployment of heterogeneous sensor networks. The proposed framework covers multiple types of information at a single node, including behaviors, physiology, emotions, fatigue, environments, and locations, so as to enable Soldier-BSNs to obtain sufficient evidence, decision-making ability, and information resilience under resource constraints. In addition, we systematically discuss the problems and solutions of each unit according to the frame structure to identify research directions for the development of wearable devices for the military.
1. Introduction
The interconnection and collaborative decision-making between combat equipment and battlefield resources is one of the characteristics of the Internet of Battlefield Things (IoBT) [1]. The concept of the IoBT was proposed by the U.S. Army Research Laboratory (ARL) to enable predictive analytics for intelligent command and control and battlefield services. The next generation of military networks will consist of densely deployed battlefield nodes, including weapons, vehicles, robots, and human wearable devices. Command, control, communications, and intelligence (C3I) systems will accelerate integration with the IoBT to influence military decision-making in future wars [2]. As an important component of the IoBT, soldiers are the most flexible information nodes on the battlefield. Heterogeneous sensors integrated into a soldier’s equipment provide a command center with multidimensional battlefield information. Meanwhile, as an interdependent and interconnected group of entities, soldiers constantly communicate, coordinate, and jointly plan and execute tasks using the equipment of the IoBT.
Wearable sensors are the basic elements of military smart devices. The sensing module, which has information resilience, collects information on the battlefield under strict resource constraints, and realizes data transmission and analysis by cooperating with other modules that are integrated in the equipment. Despite its focus on improving situational awareness, the military wearable sensor network is an extension of Body Sensor Networks (BSNs). As one of the components of the modern IoT, BSNs can realize information exchange between human beings and objects so as to monitor, analyze, and control the body and the surrounding environment [3]. As a special domain of BSNs, Soldier-BSNs (S-BSNs) have more stringent environmental constraints and greater security pressure. Researchers have attempted to encrypt the sensed data by various methods, such as relying on individual differences in Electrocardiogram (ECG) signals, to protect relevant information on soldiers [4]. With the development of S-BSNs, the IoBT will have more robust and more reliable information nodes. Meanwhile, it is important to design high-performance data fusion methods. In other words, information fusion is the best way to broaden the functional boundary of BSNs and to improve the resilience of the network.
A robust military sensing system should process raw data in a multi-source fusion manner, including classification, tracking, decision-making, prediction, and optimization. In recent years, researchers have proposed specific solutions for sensor network optimization [5], decision fusion optimization [6], data redundancy processing [7], workflow scheduling [8], and network resilience in the distributed mode. In particular, the authors in [9] propose an integrated intelligent system based on swarm logic that integrates high-level data analysis with low-level device/task management. In addition, with improvements in computing and storage capacity, it is inevitable that an autonomous or semi-autonomous analysis platform (Fusion Center) will be established based on artificial intelligence (AI) technology. In the field of visual tracking, machine learning has become an important tool for video surveillance, understanding scenarios, and human–computer interaction [10,11]. The authors in [12] propose a critical AI technology analysis to derive guidelines for designing distributed systems of Collective Situational Understanding (CSU). Their discussion on the processing of uncertain and sparse data is also helpful to the design of S-BSNs.
In this paper, we build a new fusion framework from an application perspective. The framework integrates low-level sensing data and high-level decision information to build a comprehensive and extensible application research system for S-BSNs. Our contributions are twofold. Firstly, a multi-level fusion framework (MLFF) is proposed. Compared with a battlefield situation, we are more concerned with the physiology of a soldier, which is a neglected part of current military smart devices. Previous research on wearable technology mainly focuses on disease diagnosis [13,14], physical rehabilitation [15], and action recognition [16] in non-military fields. However, these techniques are not suitable for highly trained soldiers on the battlefield. Considering the complexity of the battlefield environment, we define the attributes of soldiers in terms of three levels. We encourage high-level physiological information to be analyzed in the multi-source fusion mode to fully utilize sensor resources. The MLFF involves some recessive physiological states, such as emotion and fatigue, which will be combined with other necessary physiological parameters to construct a new evidence set to analyze more complex physiological information. Secondly, according to the structure of the proposed framework, we summarize the future research directions and specific problems to be solved for each system unit in a battlefield environment, and provide a corresponding reference scheme based on the latest research results. We believe that the development of wearable devices for the military should be based on the safety of soldiers. Only by reducing the number of casualties that are caused by injuries or other emergencies on the battlefield can the success rate of military missions be improved. Therefore, research directions on the physiological monitoring of, emotion recognition in, and behavior tracking for soldiers have been proposed. We also encourage the design of integrated systems for soldier safety that combine environmental information and location technology.
The rest of the paper is organized as follows. Section 2 introduces the latest developments in the integration of military smart equipment and multiple sensors and summarizes review articles on wearable technology in other fields. Section 3 describes the proposed framework and the model of the deployment of heterogeneous sensor networks. Section 4 summarizes some research directions and specific problems to be solved for each system unit in the battlefield environment, and provides a corresponding reference scheme based on the latest research results. Section 5 contains further summaries and discussions.
2. Related Work
The primary goal of the IoBT is to integrate new sensing platforms into military activities. Before the concept of the IoBT was proposed, researchers had started to design modern soldier equipment that was equipped with multiple sensors [17]. Although most of the research was aimed at increasing resource competitiveness and situational control in battlefield confrontations, the security of soldiers has also been increased. The U.S. Land Warrior Integrated Soldier System (LWISS), which includes a protective system, an information-processing system, and a combat system, has been one of the outstanding achievements of military smart devices [18]. The system integrates a variety of sensors and communication devices that enable soldiers to exchange intelligence in the point-to-point mode. The U.S. Tactical Assault Light Operator Suit (TALOS), which has been in development for many years, is equipped with exoskeletons, smart helmets, protective armor, and multiple biosensors to maximize the battlefield capabilities of soldiers. Some of the latest research results on wearable devices for the military are shown in Table 1. It can be seen that the next generation of smart wearable devices for the military will address soldiers’ task efficiency. Research on assistive systems based on physiological parameters is the key to upgrading arms.
With the development of wearable sensors towards miniaturization and intelligence, physiological analysis based on multiple heterogeneous sources has been applied in many fields. We have summarized the latest review articles on research achievements in wearable technology. Although these reviews do not cover the military field, the research findings that are discussed are useful for developing and upgrading S-BSNs. Firstly, according to a functional classification, Ultra-Wide Band (UWB) technology [19], motion monitoring [20], medical rehabilitation [21,22,23], gait analysis [24], and fall detection [25,26] have been comprehensively discussed by previous scholars. UWB has always been one of the key technologies for battlefield positioning. A modularized UWB device can realize short-distance positioning for soldiers in a global positioning system (GPS)-denied environment. Similarly, research results on behavior recognition and physiological monitoring under battlefield constraints can be applied to the development goal for S-BSNs. Secondly, according to a classification by the wearable device’s position on the body, some reviews have discussed wearable devices based on the wrist [27], the hand [28], textiles (the body) [29,30], and the exoskeleton (upper limb [31] and lower limb [32]). Military exoskeletons and intelligent textiles have always been the focus of military equipment researchers. The monitoring of physiological signals, the improvement of basic capabilities (load or stadia), and the provision of interfaces for human–computer interaction are realized by densely deployed heterogeneous sensors. Therefore, this kind of review may be valuable for researchers who are concerned with local physiological parameters. Thirdly, considering that soldiers comprise a population of the right age and with strong bodies, we believe that researchers should explore the age differences in target groups to distinguish the physiological model parameters of soldiers from those of the elderly [33,34] and infants [35,36]. Finally, although this paper does not discuss methods for the fusion of sensors and parallel system units, we have selected two review articles to help scholars who are interested in wearable technology based on multi-sensor fusion [37,38].
In this paper, a multi-level fusion framework (MLFF) based on S-BSNs is proposed. Considering the complexity of battlefield constraints, we discuss research directions for and the specific problems of each system unit in detail, and summarize the corresponding reference schemes for each problem. The proposed framework focuses more on the personal attributes of soldiers, while retaining the traditional sensing capabilities, to emphasize the importance of soldiers’ safety. To the best of our knowledge, an insufficient amount of research has been done on wearable technology based on information fusion in the military field. Therefore, this paper aims to establish a generalized research system for S-BSNs, and provide references to researchers by analyzing specific problems. It should be pointed out that, since information fusion has gradually developed into a hybrid technology that involves self-learning, self-organization, and self-adaptation, and since high-performance fusion algorithms and new theories on fusion continue to emerge, we will systematically analyze methods for information fusion, data coordination mechanisms, and algorithm nesting patterns based on the multi-level fusion framework in future work to further improve the decision-making performance of wearable devices for the military.
3. Multi-Level Fusion Framework (MLFF)
There is an unknown correlation among the behavior, physiology, and psychology of soldiers. In complex battlefield environments, sensing modules have a very limited role in tracking single vital signs to monitor the status of soldiers is very. Multi-sensor information fusion is a commonly used method to improve the accuracy and robustness of systems. In this section, a multi-level fusion framework for S-BSNs is proposed that aims to obtain more types of information on the safety of soldiers with higher reliability under resource constraints.
3.1. The Composition of MLFF
Firstly, extreme emergencies (C-level information) that involve soldiers in a battlefield environment, such as injuries, asphyxiation, and disappearances, need to be reported in a timely manner. Therefore, the ability of the system to identify and to respond to emergencies is particularly important. However, complex events are often accompanied by strong fluctuations in physiological signals. The fusion of environmental information, location information, and the results of an analysis of multiple physiological states can effectively improve the accuracy of an emergency’s identification and can reduce the number of false alarm events that sensor faults cause. Secondly, independent analysis systems (B-level information), including a Fatigue Detection System (FDS), an Emotion Recognition System (ERS), a Behavior-Tracking System (BTS), an Environmental Detection System (EDS), a Cooperative Localization System (CLS), and a B-level physiological parameter set are necessary for calculation, storage, and invocation. The results of an analysis from an independent system can not only serve as cognitive evidence of C-level information, but also provide feedback to the discrete state of soldiers. B-level information provides sufficient information resilience for S-BSNs. Since the results of information fusion in the system are interrelated, the final decision will not depend only on the sensor with the worst performance. Finally, as the basic elements of the MLFF, homogeneous or heterogeneous sensors provide A-level information for the system. The number of sensors and their type and location are determined by the integrated system functions of the equipment. Figure 1 shows the multi-sensor based MLFF model, which integrates six B-level information systems and involves 16 kinds of heterogeneous sensors.
Structurally, the MLFF has three layers. For B-level information, multiple pieces of A-level evidence are required to support the results of fusion analysis in each system. In other words, the output of each sensor may affect the results of multiple systems. This pattern of cross-fusion ensures that any B-level system will not feedback abnormal events separately. Considering the complexity of C-level events, decision-level fusion is more suitable for the process of analyzing an emergency. The structural advantage of the MLFF enables the system to increase the amount of evidence in decision-level fusion under the condition of limited sensor resources (including all B-level information and some A-level information related to weight, which will be explained in Section 4.2). For nodes of the same level, the robustness of A-level information depends on the number and deployment location of homogeneous sensors; the output results of B-level units are highly correlated, and the results of an analysis with a large deviation will conflict with a system of the same level. From the top view of the model, it can be seen that the MLFF collects basic evidence through a large number of sensors (homogeneous sensors are not shown in the figure) and gradually upgrades the results of analysis in the mode of cross-fusion, which will be used to identify emergencies involving soldiers’ safety. The MLFF always emphasizes the importance of soldiers’ safety. Therefore, no matter what method of information fusion researchers adopt, the accuracy of the recognition of a soldier’s status is always a priority.
From the perspective of the fusion center, the MLFF provides an integrated framework for existing wearable-technology-based multi-source fusion methods. Considering the computing power of the terminal and the pressure from the system’s communication bandwidth, data-level fusion is the most suitable way to solve conflicts in the data of homogeneous sources. For fusion with heterogeneous sensors, nonlinear mathematical methods with fault tolerance, adaptability, associative memory, and a parallel processing ability all meet the basic fusion requirements. In the MLFF, original data are calculated and stored according to the service objects in different data analysis modes (a terminal calculation or an upload to the cloud). In this process, an assessment of the results and sensor/task management are necessary. High-level information is used to make a judgment on the accuracy of a system of the same level and feedback the human body’s state according to the reasoning mechanism. In addition, a reliable fusion system needs to ensure the timely registration of information on interactions and the synchronization of the interface of the sensing–analysis–feedback–optimization process.
3.2. Sensor Deployment Model Based on the MLFF
Taking the system type shown in Figure 1 as an example, the S-BSNs will be composed of six B-level systems and multiple sensor nodes. Due to the existence of homogeneous sensors that serve different systems or the same sensing module, the number of sensors will continue to increase. We summarize the types of sensors that are used in various systems, and describe the model of the deployment of the wearable sensor network, in Figure 2 according to selected statistical results from the literature (the results from the latest 88 research articles are also used in the discussion of research directions in Section 4). It can be seen that A-level information is captured by the sensing nodes that cover key parts of the body, and homogeneous sensors that are deployed on different body parts may be responsible for data collection for different systems. It is worth mentioning that there may also be multiple homogeneous sensors for the same node, which can solve conflicts in data and improve the sensing module’s reliability by means of weighted fusion. Therefore, the capability of the smart device to integrate sensors will determine the final effect of the MLFF. In addition, according to the latest research results, some wearable devices for the military, such as smart glasses and military exoskeletons, have been added to Figure 2. These devices provide a platform for integrating more sensors and the possibility for S-BSNs to be equipped with more complex decision-making systems.
4. Systematic Analysis of Framework Units
In this section, the research directions for, and the specific problems of, each framework unit based on battlefield constraints will be systematically analyzed. For each problem, relevant research results from other fields are cited to provide references for the development of wearable technology for the military.
4.1. A-Level Information
A-level information refers to the original data from the sensing layer. Fusion of the data from homogeneous sensors is an effective method to improve the reliability of the sensing module. For fusion methods, multi-source synchronization and weight distribution are the basis of updates to algorithms. In addition, a conflict in data is a common problem in the fusion of multiple homogeneous sources [39]. Highly conflicting system inputs may lead to counterintuitive results. Sensor signals may couple different types of noise in complex battlefield environments; thus, conflicts in data are inevitable even after the same data preprocessing process has been performed. Improving the ability of the sensing module to integrate sensors and solving conflicts in data are important tasks at the A-level.
4.2. B-Level Information
B-level information is composed of information from multiple parallel systems. According to all of the possible states of a soldier in a battlefield environment, the targets of the detection system are divided into fatigue, emotion, behavior, location, surrounding environment, and some B-level physiological parameters, including blood pressure, oxygen saturation, respiration rate, and energy consumption. It should be noted that the B-level physiological parameters are calculated by the fusion of data from multiple biosensors (this is the difference between A-level data and B-level data). Very mature methods for data fusion are available, but we do not describe them in this paper.
4.2.1. Fatigue Detection System (FDS)
In a military operation, the most common physical condition of a healthy soldier is fatigue. A soldier’s task efficiency decreases with physical fatigue. At present, this recessive physiological state cannot be fed back to the command center in time. The actual battlefield situation may deviate away from the expected situation as it develops due to a lack of coordination between soldiers and the command system. Therefore, it is necessary to integrate an FDS into smart devices for the military. The latest research focuses on the identification of driving under conditions of fatigue. The input to the system requires data from a combination of biosensors and the vehicle’s built-in equipment, such as the seat, steering wheel, and rearview mirror. For soldier wearables, portability is a key consideration. Therefore, we ignored research results that were obtained with complex sensing devices when searching for the reference schemes. Similarly, we did not consider research results that were obtained with a subjective questionnaire and subjective behavior calibration.
Signs of fatigue are concentrated in the muscles, skin, brain activity, and facial activity. The currently available detection technologies, irrespective of whether they analyze a single feature or fuse data from multiple sources, have limitations in a battlefield environment. The specific problems and corresponding reference schemes are shown in Table 2.
Muscle fatigue is a typical phenomenon in human body fatigue. First, soldiers on a battlefield tend to be in patterns of complex action, which result in multi-component and nonstationary Electromyogram (EMG) signals. Second, soldiers may ignore lower-level muscle fatigue, which can affect the precision of performed operations. Similarly, a mechanical analysis of muscles and an analysis of the state of deep muscles are key technologies in military FDSs. For the states of deep muscle, previous studies used invasive detection or EMG array acquisition and processing techniques [50]; however, such techniques are not applicable to military scenarios. Therefore, wearable technology for the non-invasive analysis of deep muscle needs further exploration. In terms of hardware, traditional EMG sensors often use multiple disposable electrodes, which not only increase the weight of wearable devices, but also fail to satisfy the application conditions. Finally, we consider that a complete FDS should realize some extended functions through external devices.
Smart helmets provide a platform for measuring Electroencephalogram (EEG) signals in real time. Previous research has shown that EEG signals contain multiple characteristic parameters that are related to physiological fatigue [51]. Similarly to the specific problems that EMG sensors have, multi-channel EEG sensors will reduce the robustness of the system. Moreover, since the human brain’s structure is directly related to the signal characteristics [52], it is important to select an appropriate position in the helmet to detect fatigue in soldiers. With the development of Augmented Reality technology, smart glasses integrated into helmets will provide soldiers with more information on the battlefield. However, researchers have found that fatigue from stereo vision can seriously affect cognitive ability. Military wearables researchers should take this type of fatigue seriously.
In addition, different types of physiological signals can be used to recognize fatigue. Although most facial activities are subjectively controllable, these facial features can still serve as a source of auxiliary information for the detection of fatigue under certain conditions and ensure the recognition of fatigue with high accuracy [53]. For example, evidence of fatigue can be obtained by tracking eyeball states [54,55]. Similarly, physiological signals, such as ECG signals [56], respiratory (RSP) signals [57], galvanic skin response (GSR) signals, and blood oxygen [58,59], provide possibilities for the design of an FDS based on information fusion. Information on the fatigue of soldiers is a form of recessive information. We need to continuously increase the amount of evidence to support fatigue detection in soldiers.
4.2.2. Emotion Recognition System (ERS)
In general, soldiers’ emotions influence their decision-making on the battlefield. In an actual battlefield situation, negative emotions, such as anger, fear, and anxiety, can easily be aroused. In the classical multidimensional emotion space model, these negative emotions have similar features (all inside the zone with a negative valence and a high degree of arousal) [60]. So, an ERS must rely on physiological signals to distinguish negative emotions. Shu et al. [61] summarize the relationship between the features of various physiological signals and different emotions. We introduce negative emotion as a source of auxiliary information for the design of an ERS for the military, as shown in Figure 3.
We focus on several issues with an ERS for the military. Previous research has shown that movement can affect human emotions, meaning that an ERS needs to consider a larger number of complex factors, such as the motion of soldiers or individual physiological differences. The authors in [62] analyze the differences in emotional expression among people in a cross-cultural population from the perspective of visual representation. The results show that an ERS based on facial features cannot universally apply to a military with a multi-racial culture. The amount of information that is input into an emotion recognition system will inevitably need to be increased. As a special occupation with strict training, soldiers are more restrained in the emotional expression of physiological stimulation. If facial features are taken as the source of information, an ERS needs to have the ability to recognize micro-expressions and a higher sensitivity, namely the ability to recognize emotion in real time. Although emotional information can help the command center to determine the state of soldiers in a battlefield environment, negative emotions are often non-discrete. Precise emotional outcomes, such as compound emotions [63], require further investigation.
An ERS can call on a variety of data from sensors. Due to its being highly sensitive and a mature signal acquisition technology, and the low degree of subjective control, EEG signals are one of the most important types of physiological signal for the quantitative analysis of soldiers’ emotions. However, EEG signals have feature parameters with a high number of dimensions, and redundant features will reduce the efficiency of the algorithm. The design of the method for feature extraction and the selection of feature types are the key techniques for EEG signal analysis. In the data analysis process, considering the storage, calculation, and data transmission capacity of the equipment, we suggest reducing the data training time or the number of iterations when updating the algorithm on the premise of ensuring accurate recognition of negative emotion [64]. Different from physiological signals, such as EEG or ECG signals, facial representation plays an auxiliary role in the emotion recognition process. Some changes, such as the movement of the mouth or nose [65], have a certain reference value. Previous studies have shown that an ERS based on the fusion of data from multiple sources has higher accuracy. Even with a fast decision-level fusion method, the result is more reliable than that obtained with a single sensor [66,67]. The physiological parameters that were used in the latest research include EEG, ECG [68,69], GSR [70,71], EMG [72], PhotoPlethysmoGraphy (PPG) [73], body temperature [74], and facial features. The authors in [75] quantify human stress by combining heart rate variability (HRV) with salivary cortisol; however, the process for the extraction of biochemical signals is not suitable for passive monitoring of emotions. Similarly, the authors in [74,76] added Electrooculography (EOG) to the data fusion process. To our knowledge, no wearable device for non-invasive EOG measurement exists that can provide real-time physiological information, which poses a new challenge for researchers of wearable devices. Table 3 shows some of the specific problems of ERSs and the corresponding reference schemes.
4.2.3. Behavior Tracking System (BTS)
In battlefield environments, soldiers may be in an unusual state of behavior, such as a rapid march, a high-altitude jump, and injury. A BTS can operate in parallel with other detection systems and provide more accurate body status information for medical units or the command center. Smart devices for the military, regardless of whether it is a robot on the battlefield as an independent sensing node or an intelligent exoskeleton that used to cross the boundaries of a soldier’s ability, need soldiers to provide multi-dimensional input to the system. The currently available behavioral recognition technology can use limb movements with significant characteristics to excite the control system, which means that BTSs play an important role in S-BSNs.
Considering the computational resources, we classify the behaviors of soldiers according to their complexity [86]. A simple movement refers to a basic behavior with obvious characteristics, such as standing, sitting, falling, walking, and running. The results on the recognition of behaviour are used to supplement the high-level information. For example, a body tilting behavior is divided into a rapid tilt (passive) and a slow tilt (active) [87]. When a soldier is in a rapid tilt, other physiological signals, such as blood pressure, heart rate, respiration, and pulse, can be used to remotely determine whether the soldier has fallen [88]. Similarly, multiple systems use gait characteristics in their analysis [89]; examples are parallel systems that recognize emotions, quantify energy loss, or identify soldiers’ identities [90]. Complex forms of movement focus on localized body behavior. A BTS covers a range of positions for wearable devices according to behavioral characteristics, such as a head controller [91,92], smart gloves [93,94], an exoskeleton for the waist [95,96,97], and smart shoes [98,99]. In addition, smart textiles provide possibilities for behavior recognition. The status of some key body parts, including the arms [100] and knees [101,102], needs to be tracked in real-time by inertial units. Table 4 summarizes research directions based on different body parts. It is worth mentioning that the analysis of simple behaviours and the analysis of complex behaviors have several issues in common that need to be considered. The first is energy loss [103]. A BTS is the main system that is used to calculate energy loss in soldiers. It can operate together with the FDS to determine a soldier’s working status, which helps the command center deploy soldiers. The second is the recognition of fast motion [104]. To the best of our knowledge, it is difficult for wearable sensors to recognize fast motion; however, it is a research issue that will inevitably arise in complex battlefield environments. The final issue is computing cost [105]. Compared with the other systems in the MLFF, the BTS has the largest number of sensors, which means that we need to conduct data mining on behavioral data with a high number of dimensions. The optimization of computing resources is an important problem in a BTS.
Different from the action recognition system for fixed scenes, we cannot arrange image-sensing devices in a battlefield environment based on a third-person perspective. Although image-processing technology has outstanding advantages in the field of action recognition [106,107,108], we have to rely on the classic inertial components as the main information acquisition device. Previous studies have shown that inertial sensors are highly sensitive to the speed and the angle of a limb’s movement, and these sensors have been used in motion pattern analysis [109] and gesture recognition [110,111]. EMG [112], ECG [111], and EEG [113] signals can also be used for behavior recognition. EMG signals are often used to obtain data on precision operations because of their ability to provide feedback on local limb movements. For example, the control methods that the authors in [114] discuss, which are based on electromyogram-pattern recognition (EMG-PR), provide possibilities to design the control interface of the exoskeleton. In addition, the authors in [115] designed a low-cost optical fiber force myography sensor to provide a new channel for non-invasive hand posture identification. Information fusion is the key technology of these systems. A BTS contains many homogeneous and heterogeneous sensors. The advantages of this structure are the the robustness and the accuracy it provides the system with. Complex noise types and the highly conflicting original data force us to adopt in a BTS for the military feature-level fusion (a process to reduce the dimensionality of the feature parameters needs to be considered) and decision-level fusion. As an important part of B-level information, the results from a BTS can be used in almost any multi-system fusion framework to determine soldiers’ more complex physiological states.
4.2.4. Cooperative Localization System (CLS)
The development of communication and positioning technology is mutually reinforcing. The location of units is usually determined by a wide-area positioning system in force-based military operations, which helps to analyze the battlefield situation and with the exchange of intelligence. However, from the perspective of wearable devices, CLSs tend to feedback and modify the information from battlefields. In other words, these systems facilitate interaction between team members, such as maintaining a formation during special operations or providing the location of nearby wounded soldiers. This mechanism enables soldiers to construct a moving coordinate system in an interactive mode to mark a target’s position, thus reducing the response time in the case of an emergency. Therefore, wearable devices for the military should not only adopt wide-area positioning technology (such as a Global Navigation Satellite System (GNSS)), but also integrate a short-range CLS, which determines the type of sensor, the number of sensors, and the utilization efficiency of the sensors in S-BSNs.
Complex battlefield situations may cause soldiers to be located in an environment in which wide-area positioning technology does not work. The CLS needs to obtain the relative position of soldiers when GPS, base station, pseudolite [119], and other positioning technologies fail. The system’s design needs to consider the hardware structure, the positioning method, the positioning performance, and environmental interference, which are problems that indoor positioning technology also faces. Indoor positioning refers to short-range positioning technology in a fixed area, including infrared positioning [120], ultrasonic positioning [121], Radio Frequency Identification (RFID) positioning [122], UWB positioning [123], inertial navigation [124], geomagnetic positioning [125], and Visible Light communication (VLC) positioning [126]. The changing environmental constraints make it impossible for the CLS to adopt infrared positioning that relies on line-of-sight propagation and geomagnetic or WLAN (Wireless Local Area Network) positioning technology based on the fingerprint method. Moreover, the VLC technology cannot be used due to the sensitivity of the signal. Table 5 lists short-range positioning techniques that satisfy local battlefield positioning conditions. Considering the utilization efficiency of the sensor, the IMU (Inertial Measurement Unit) can be used as the core component without a global position tag. An inertial system that integrates auxiliary sensors, such as a barometer, can calculate the multi-dimensional coordinates of soldiers. However, with the iterative accumulation of calculation errors, the reliability of the system will be seriously reduced. The fusion of multiple positioning techniques is necessary to help correct inertial data in real time. UWB, ultrasound, and RFID positioning all require the integration of transceivers, which increase the load on the soldier. Although many studies have demonstrated that the UWB technology has significant advantages for battlefield localization, developing a micro-positioning module remains a challenge [19]. It is worth mentioning that the integration technology for the ultrasonic sensor is mature. Although ultrasound is susceptible to interference from the transmission medium, it has advantages in terms of penetration and positioning range when compared to RFID. The RFID positioning technology is greatly restrained in a battlefield environment. Passive RF can realize close positioning; however, it has no communication ability. Active RF has a relatively wide positioning range; however, it requires a sufficient energy supply. In a word, CLSs need to realize technology fusion under the condition of limited resources. Adding different types of basic sensing devices can improve the robustness of the positioning system.
4.2.5. Environment Detection System (EDS)
The conventional battlefield environment detectors are a series of target-driven independent devices. The detection results are used to determine the degree of the threat that an antagonistic environment represents to soldiers in real time. Similarly, an EDS is composed of several wearable environmental sensors that are used to monitor the air temperature, air pressure, light intensity, radiation, and other variables in the environment around soldiers. Studies have shown that there is a correlation between environmental information and a human’s physiological state [128]. Moreover, miniaturized environmental sensors add various data types to S-BSNs. On this basis, environmental information can carry weight in the MLFF, and be directly used in the analysis of a soldier’s status. However, heterogeneous data types present challenges for the design of high-performance fusion methods. As far as we know, the fusion approach that involves environmental information is limited to decision-level fusion. However, this approach can still be used to upgrade the information in the framework. From the perspective of information fusion, the environment is not only an attribute that is used to model the battlefield, but also one of the valid forms of evidence that improves the information resilience of S-BSNs. In other words, the proposed framework has sufficient evidence to ensure real-time monitoring of a soldier’s physiological state.
4.3. C-Level Information
Different from commercial devices, wearable devices for the military need to consider emergencies involving soldiers’ safety in addition to analyzing basic physiological states. An emergency is composed of a series of basic events. We have systematically reviewed the latest research on basic events in different fields. The MLFF provides the possibility to integrate different analysis techniques and recognize more complex events.
An emergency is correlated with multiple physiological signals. For example, being shot can lead to blood loss and emotional fluctuations, and severe injuries may cause drastic changes in physiological parameters, such as blood pressure, blood oxygen, heart rate, and PPG [17]. Therefore, further fusion of B-level information is necessary. However, even with the most advanced computing and communication technologies that improve the real-time analysis capability of wearable devices, data mining in multi-dimensional heterogeneous information remains a challenge. Decision-level fusion is considered to be more suitable for S-BSNs with a deep fusion of data and technology. Compared with data-level and feature-level fusion, decision-level fusion can not only analyze independent system units in the abstract, but also reduce the calculation cost and the pressure on the communication bandwidth. Moreover, the MLFF provides more types of evidence for decision-level fusion, so as to reduce the impact of the low accuracy. By summarizing selected research results on wearable devices (88 papers), we present the relationship between all of the involved system units and research problems in the proposed framework, as shown in Figure 4. It can be seen that C-level information can be co-analyzed by multi-sensor, multi-method, and multi-level fusion. Meanwhile, the framework’s structure clearly shows the weight of each sensing module in the S-BSNs. In our statistics, ECG signals have a greater number of edges compared with other nodes, indicating that the analysis of various systems is more dependent on ECG signals. In other words, the more highly weighted a sensor’s output is, the more physiological information it contains. Therefore, we suggest that highly weighted A-level information be added to the evidence set of a C-level emergency to further increase the number of types of evidence for decision-level fusion and improve the resilience of the system on the battlefield.
We are concerned about the resilience of the S-BSNs on the battlefield. Since the MLFF is to be applied in the military domain, all systems must tolerate disruptions in communication, a loss of sources, and malicious data inputs [129]. Wearable devices for the military not only need a parallel data coordination mechanism, but must also ensure system robustness in the case of a loss of evidence. Within the range of a wearable device’s energy and computing capabilities, broadening the bounds of the feasibility of accurate reconstruction of the state of a system by increasing the number of types of evidence is the most effective way to establish a resilient fusion framework.
5. Discussion
As a key technology in battlefield situational awareness, information fusion has always been the focus of military research. However, we have to admit that there is still a big gap between the automatic fusion processing capability and the requirements of high-level applications. The traditional Joint Directors of Laboratories (JDL) model has developed into a multi-stage fusion model that is driven by a target/application that allows for cognitive assistance. The typical representative of this “human-in-the-loop” pattern is the Data Fusion Information Group (DFIG) model. However, the service objective of the JDL/DFIG model in the military field always focuses on wide-area information, such as situational awareness or target tracking, and improves the decision-making ability of the system by emphasizing the interaction between users’ active behaviors and each stage of the model. In contrast, the MLFF is designed for S-BSNs. It is regarded as a fusion model for inward-facing sensing of a single node in the IoBT. In other words, users are more involved in the fusion process at all levels in a passive manner. At the same time, high-level decisions can still be optimized using a “user (or command center) refinement” approach. In addition, unlike the JDL model, which must occur in a hierarchical order, the structural characteristics of the MLFF provide the possibility for low-level framework units (source data management) to directly participate in body state assessment. Table 6 shows a comparison between the MLFF and some of the existing frameworks/systems. It can be seen that the proposed framework also has certain advantages in terms of function coverage.
In Section 4, we systematically analyzed the research questions at each level according to the proposed framework. However, wearable technology for the military based on information fusion also faces many challenges in framework implementation. First of all, the complex sensor deployment puts tremendous pressure on the device’s energy and body load. The MLFF supports the integration of more types of sensing modules; however, the upper limit of energy storage is positively correlated with the weight of wearable devices. Although some teams have started to pay attention to the design of power modules, such as SPaRK (energy-scavenging exoskeletons) described in Table 1, improving the energy storage capacity and reducing soldiers’ loads remain a challenge. Secondly, in terms of communication and computing, multi-dimensional heterogeneous data need a reasonable communication bandwidth and computing mode. Collaboration between edge computing and cloud computing is the core technology of data analysis. In a complex battlefield environment, a multi-sensor, multi-method, and multi-level analysis framework not only requires a centralized processing mode to manage heterogeneous sources and provide a knowledge base or artificial bias for intelligent decision-making, but also needs a terminal computing capacity to improve the communication performance and decision-making efficiency. Finally, information security in antagonistic environments is more complex with the diversification of communication and data storage patterns. As one of the open challenges of the IoBT, information security has always been one premise for the development of wearable technology for the military.
6. Conclusions
With the development of the IoBT, the intelligent upgrade of S-BSNs has become inevitable. While retaining situational awareness of the battlefield, the next generation of wearable devices for the military should be based on the personal attributes of soldiers. Although highly integrated systems can meet the diverse service needs of modern battlefields, a complete fusion framework is necessary to adjust the cooperative relationship among all sensing modules and applications. Therefore, in this paper, a multi-level fusion framework based on heterogeneous sensor networks is proposed. The framework is divided into three levels, including original information collected by densely deployed sensing modules, cross-fused independent systems, and emergencies as determined from multi-dimensional evidence. The structure of the MLFF can increase the number of evidence types and the information resilience of S-BSNs under resource constraints. A final decision will not depend on the sensing unit with the worst performance. The proposed framework covers information on soldiers in multiple respects, including motion, physiology, emotion, fatigue, environment, and location, and allows for the addition of other types of sensors and systems. All decisions the system makes are used to identify and alert soldiers to extreme events involving their safety. In addition, since wearable technology based on multi-sensor fusion lacks a generalized research system in the military field, we sorted the specific problems of each system according to the proposed framework, and provided some research directions for the development of S-BSNs by referring to the research results on wearable technology in other fields.
We have built an application-oriented fusion framework for wearable devices for the military. However, the framework has some limitations. Firstly, there is an optimization problem in sensor networks. Although the functions of homogeneous and heterogeneous sensors are different, the occupied network resources cannot be ignored. Under strict resource constraints, the design of path-first and resource-first sensor deployment models needs to be further considered. Secondly, the system is not comprehensive enough. We have made an attempt to best meet the application needs of a healthy soldier in a battlefield environment, but the framework still needs to consider more functional modules. The existing applications also need to be improved. For example, in the ERS, in order to reduce the computational complexity, we only focused on the negative emotions of soldiers, which covers only half of the emotional space. Finally, the fusion framework needs to be implemented by nesting the existing multi-class application algorithms. In future work, we will systematically analyze the fusion methods that are used at each level, and propose a data coordination mechanism and an algorithm nesting pattern suitable for the MLFF to improve the decision-making performance of wearable devices for the military.
Author Contributions
H.Z. and W.G. conceived the scheme. S.-C.D., Y.L. and H.S. performed the literature review and classified the studies. S.-C.D. and H.S. provided summaries and wrote the paper.
Funding
This work was supported by the Fundamental Research Funds for the Central Universities [grant number: N161608001] and the National Social Science Fund of China (NSSFC) for the Art Major Project [grant number: 18ZD23].
Acknowledgments
The authors would like to thank the Embedded Technology Lab at Northeastern University and the Big Data and Information Processing Lab at Shenyang University of Chemical Technology for their technical support.
Conflicts of Interest
The authors declare no conflicts of interest.
Notation
| IoBT | Internet of Battlefield Things |
| BSNs | Body Sensor Networks |
| S-BSNs | Soldier Body Sensor Networks |
| MLFF | multi-level fusion framework |
| FDS | Fatigue Detection System |
| ERS | Emotion Recognition System |
| BTS | Behavior Tracking System |
| EDS | Environment Detection System |
| CLS | Cooperative Localization System |
| PPG | PhotoPlethysmoGraphy |
| ECG | Electrocardiogram |
| GSR | Galvanic skin response |
| EMG | Electromyogram |
| EEG | Electroencephalogram |
| EOG | Electrooculography |
| HRV | Heart rate variability |
| RFID | Radio Frequency Identification |
| UWB | Ultra Wideband |
| VLC | Visible Light communication |
| GNSS | Global Navigation Satellite System |
References
- Farooq, M.J.; Zhu, Q. On the Secure and Reconfigurable Multi-Layer Network Design for Critical Information Dissemination in the Internet of Battlefield Things (IoBT). IEEE Trans. Wirel. Commun. 2018, 17, 2618–2632. [Google Scholar] [CrossRef] [Green Version]
- Russell, S.; Abdelzaher, T. The Internet of Battlefield Things: The Next Generation of Command, Control, Communications and Intelligence (C3I) Decision-Making. In Proceedings of the MILCOM 2018—2018 IEEE Military Communications Conference (MILCOM), Los Angeles, CA, USA, 29–31 October 2018; pp. 737–742. [Google Scholar]
- Fortino, G.; Ghasemzadeh, H.; Gravina, R.; Liu, P.X.; Poon, C.C.Y.; Wang, Z. Advances in multi-sensor fusion for body sensor networks: Algorithms, architectures, and applications. Inf. Fusion 2019, 45, 150–152. [Google Scholar] [CrossRef]
- Pirbhulal, S.; Zhang, H.; Wu, W.; Mukhopadhyay, S.C.; Zhang, Y.-T. Heartbeats Based Biometric Random Binary Sequences Generation to Secure Wireless Body Sensor Networks. IEEE Trans. Biomed. Eng. 2018, 65, 2751–2759. [Google Scholar] [CrossRef] [PubMed]
- Ciuonzo, D.; Rossi, P.S. Quantizer Design for Generalized Locally Optimum Detectors in Wireless Sensor Networks. IEEE Wirel. Commun. Lett. 2018, 7, 162–165. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Buonanno, A.; D’Urso, M.; Palmieri, F. Distributed classification of multiple moving targets with binary wireless sensor networks. In Proceedings of the 2011 14th International Conference on Information Fusion (FUSION), Chicago, IL, USA, 5–8 July 2011; pp. 1–8. [Google Scholar]
- Dao, T.; Roy-Chowdhury, A.; Nasrabadi, N.; Krishnamurthy, S.V.; Mohapatra, P.; Kaplan, L.M. Accurate and Timely Situation Awareness Retrieval from a Bandwidth Constrained Camera Network. In Proceedings of the 2017 IEEE 14th International Conference on Mobile Ad Hoc and Sensor Systems (MASS), Orlando, FL, USA, 22–25 October 2017; pp. 416–425. [Google Scholar]
- Wang, Y.; Liu, H.; Zheng, W.; Xia, Y.; Li, Y.; Chen, P.; Guo, K.; Xie, H. Multi-Objective Workflow Scheduling with Deep-Q-Network-Based Multi-Agent Reinforcement Learning. IEEE Access 2019, 7, 39974–39982. [Google Scholar] [CrossRef]
- Buonanno, A.; D’Urso, M.; Prisco, G.; Felaco, M.; Meliado, E.F.; Mattei, M.; Palmieri, F.; Ciuonzo, D. Mobile sensor networks based on autonomous platforms for homeland security. In Proceedings of the 2012 Tyrrhenian Workshop on Advances in Radar and Remote Sensing (TyWRRS), Naples, Italy, 12–14 September 2012; IEEE: Naples, Italy, 2012; pp. 80–84. [Google Scholar] [Green Version]
- Zheng, Y.; Sun, L.; Wang, S.; Zhang, J.; Ning, J. Spatially Regularized Structural Support Vector Machine for Robust Visual Tracking. IEEE Trans. Neural Netw. Learn. Syst. 2018, 99, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Y.; Wang, X.; Zhang, G.; Xiao, B.; Xiao, F.; Zhang, J. Multiple Kernel Coupled Projections for Domain Adaptive Dictionary Learning. IEEE Trans. Multimed. 2019, 1. [Google Scholar] [CrossRef]
- Cerutti, F.; Alzantot, M.; Xing, T.; Harborne, D.; Bakdash, J.Z.; Braines, D.; Chakraborty, S.; Kaplan, L.; Kimmig, A.; Preece, A.; et al. Learning and Reasoning in Complex Coalition Information Environments: A Critical Analysis. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 1–8. [Google Scholar]
- Anastasopoulou, P.; Antonopoulos, C.; Shgir, H.; Krikis, G.; Voros, N.S.; Hey, S. Mobile Multi-parametric Sensor System for Diagnosis of Epilepsy and Brain Related Disorders. In Wireless Mobile Communication and Healthcare; Godara, B., Nikita, K.S., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; Volume 61, pp. 207–214. ISBN 978-3-642-37892-8. [Google Scholar]
- Zhu, Y.; Liu, D.; Grosu, R.; Wang, X.; Duan, H.; Wang, G. A Multi-Sensor Data Fusion Approach for Atrial Hypertrophy Disease Diagnosis Based on Characterized Support Vector Hyperspheres. Sensors 2017, 17, 2049. [Google Scholar] [CrossRef] [PubMed]
- Xiong, P.; Wu, C.; Zhou, H.; Song, A.; Hu, L.; Liu, X.P. Design of an accurate end-of-arm force display system based on wearable arm gesture sensors and EMG sensors. Inf. Fusion 2018, 39, 178–185. [Google Scholar] [CrossRef]
- Cvetković, B.; Szeklicki, R.; Janko, V.; Lutomski, P.; Luštrek, M. Real-time activity monitoring with a wristband and a smartphone. Inf. Fusion 2018, 43, 77–93. [Google Scholar] [CrossRef]
- Friedl, K.E. Military applications of soldier physiological monitoring. J. Sci. Med. Sport 2018, 21, 1147–1153. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Murray, J. Wearable computers in battle: Recent advances in the Land Warrior system. In Proceedings of the Digest of Papers. Fourth International Symposium on Wearable Computers, Atlanta, GA, USA, 16–17 October 2000; pp. 169–170. [Google Scholar]
- Yan, S.; Soh, P.J.; Vandenbosch, G.A.E. Wearable Ultrawideband Technology—A Review of Ultrawideband Antennas, Propagation Channels, and Applications in Wireless Body Area Networks. IEEE Access 2018, 6, 42177–42185. [Google Scholar] [CrossRef]
- Camomilla, V.; Bergamini, E.; Fantozzi, S.; Vannozzi, G. Trends Supporting the In-Field Use of Wearable Inertial Sensors for Sport Performance Evaluation: A Systematic Review. Sensors 2018, 18, 873. [Google Scholar] [CrossRef] [PubMed]
- Martín-Vaquero, J.; Hernández Encinas, A.; Queiruga-Dios, A.; José Bullón, J.; Martínez-Nova, A.; Torreblanca González, J.; Bullón-Carbajo, C. Review on Wearables to Monitor Foot Temperature in Diabetic Patients. Sensors 2019, 19, 776. [Google Scholar] [CrossRef] [PubMed]
- Taj-Eldin, M.; Ryan, C.; O’Flynn, B.; Galvin, P. A Review of Wearable Solutions for Physiological and Emotional Monitoring for Use by People with Autism Spectrum Disorder and Their Caregivers. Sensors 2018, 18, 4271. [Google Scholar] [CrossRef] [PubMed]
- Ray, P.P.; Dash, D.; De, D. A Systematic Review of Wearable Systems for Cancer Detection: Current State and Challenges. J. Med. Syst. 2017, 41, 180. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Lach, J.; Lo, B.; Yang, G.-Z. Toward Pervasive Gait Analysis with Wearable Sensors: A Systematic Review. IEEE J. Biomed. Health Inf. 2016, 20, 1521–1537. [Google Scholar] [CrossRef] [PubMed]
- Ma, C.; Wong, D.; Lam, W.; Wan, A.; Lee, W. Balance Improvement Effects of Biofeedback Systems with State-of-the-Art Wearable Sensors: A Systematic Review. Sensors 2016, 16, 434. [Google Scholar] [CrossRef] [PubMed]
- Koshmak, G.; Loutfi, A.; Linden, M. Challenges and Issues in Multisensor Fusion Approach for Fall Detection: Review Paper. J. Sens. 2016, 2016, 6931789. [Google Scholar] [CrossRef]
- Kamišalić, A.; Fister, I.; Turkanović, M.; Karakatič, S. Sensors and Functionalities of Non-Invasive Wrist-Wearable Devices: A Review. Sensors 2018, 18, 1714. [Google Scholar] [CrossRef] [PubMed]
- Pacchierotti, C.; Sinclair, S.; Solazzi, M.; Frisoli, A.; Hayward, V.; Prattichizzo, D. Wearable Haptic Systems for the Fingertip and the Hand: Taxonomy, Review, and Perspectives. IEEE Trans. Haptics 2017, 10, 580–600. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nesenbergs, K.; Selavo, L. Smart textiles for wearable sensor networks: Review and early lessons. In Proceedings of the 2015 IEEE International Symposium on Medical Measurements and Applications (MeMeA) Proceedings, Turin, Italy, 7–9 May 2015; pp. 402–406. [Google Scholar]
- Stoppa, M.; Chiolerio, A. Wearable Electronics and Smart Textiles: A Critical Review. Sensors 2014, 14, 11957–11992. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rehmat, N.; Zuo, J.; Meng, W.; Liu, Q.; Xie, S.Q.; Liang, H. Upper limb rehabilitation using robotic exoskeleton systems: A systematic review. Int. J. Intell. Robot. Appl. 2018, 2, 283–295. [Google Scholar] [CrossRef]
- Gálvez-Zúñiga, M.A.; Aceves-López, A. A Review on Compliant Joint Mechanisms for Lower Limb Exoskeletons. J. Robot. 2016, 2016, 5751391. [Google Scholar] [CrossRef]
- Rucco, R.; Sorriso, A.; Liparoti, M.; Ferraioli, G.; Sorrentino, P.; Ambrosanio, M.; Baselice, F. Type and Location of Wearable Sensors for Monitoring Falls during Static and Dynamic Tasks in Healthy Elderly: A Review. Sensors 2018, 18, 1613. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Yang, Z.; Dong, T. A Review of Wearable Technologies for Elderly Care that Can Accurately Track Indoor Position, Recognize Physical Activities and Monitor Vital Signs in Real Time. Sensors 2017, 17, 341. [Google Scholar] [CrossRef]
- Singh, P.; Kaur, G.; Kaur, D. Infant Monitoring System Using Wearable Sensors Based on Blood Oxygen Saturation: A Review. In Intelligent, Secure, and Dependable Systems in Distributed and Cloud Environments; Traore, I., Woungang, I., Awad, A., Eds.; Springer International Publishing: Cham, Switzerland, 2017; Volume 10618, pp. 162–168. ISBN 978-3-319-69154-1. [Google Scholar]
- Chen, H.; Xue, M.; Mei, Z.; Bambang Oetomo, S.; Chen, W. A Review of Wearable Sensor Systems for Monitoring Body Movements of Neonates. Sensors 2016, 16, 2134. [Google Scholar] [CrossRef] [PubMed]
- Nweke, H.F.; Teh, Y.W.; Mujtaba, G.; Al-garadi, M.A. Data fusion and multiple classifier systems for human activity detection and health monitoring: Review and open research directions. Inf. Fusion 2019, 46, 147–170. [Google Scholar] [CrossRef]
- Sun, S.; Lin, H.; Ma, J.; Li, X. Multi-sensor distributed fusion estimation with applications in networked systems: A review paper. Inf. Fusion 2017, 38, 122–134. [Google Scholar] [CrossRef]
- Wei, P.; Ball, J.E.; Anderson, D.T. Multi-sensor conflict measurement and information fusion. In Proceedings of the SPIE 9842, Signal Processing, Sensor/Information Fusion, and Target Recognition XXV, Baltimore, MD, USA, 17 May 2016; p. 98420F. [Google Scholar]
- Karthick, P.A.; Ghosh, D.M.; Ramakrishnan, S. Surface electromyography based muscle fatigue detection using high-resolution time-frequency methods and machine learning algorithms. Comput. Methods Programs Biomed. 2018, 154, 45–56. [Google Scholar] [CrossRef]
- Zhang, G.; Morin, E.; Zhang, Y.; Etemad, S.A. Non-invasive detection of low-level muscle fatigue using surface EMG with wavelet decomposition. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; pp. 5648–5651. [Google Scholar]
- Hu, W.; Li, K.; Wei, N.; Yue, S.; Yin, C. Influence of exercise-induced local muscle fatigue on the thumb and index finger forces during precision pinch. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 2258–2261. [Google Scholar]
- Zou, B.; Liu, Y.; Guo, M.; Wang, Y. EEG-Based Assessment of Stereoscopic 3D Visual Fatigue Caused by Vergence-Accommodation Conflict. J. Disp. Technol. 2015, 11, 1076–1083. [Google Scholar] [CrossRef]
- Ito, K.; Kourakata, Y.; Hotta, Y. Muscle fatigue detection during dynamic contraction under blood flow restriction: Improvement of detection sensitivity using multivariable fatigue indices. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 6078–6081. [Google Scholar]
- Ko, L.W.; Lai, W.K.; Liang, W.G.; Chuang, C.H.; Lu, S.W.; Lu, Y.C.; Hsiung, T.Y.; Wu, H.H.; Lin, C.T. Single channel wireless EEG device for real-time fatigue level detection. In Proceedings of the 2015 International Joint Conference on Neural Networks (IJCNN), Killarney, Ireland, 12–17 July 2015; pp. 1–5. [Google Scholar]
- Kobayshi, T.; Okada, S.; Makikawa, M.; Shiozawa, N.; Kosaka, M. Development of wearable muscle fatigue detection system using capacitance coupling electrodes. In Proceedings of the 2017 39th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Seogwipo, Korea, 11–15 July 2017; pp. 833–836. [Google Scholar]
- Myrden, A.; Chau, T. A Passive EEG-BCI for Single-Trial Detection of Changes in Mental State. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 345–356. [Google Scholar] [CrossRef] [PubMed]
- Thakur, C.; Ogawa, K.; Tsuji, T.; Kurita, Y. Soft Wearable Augmented Walking Suit With Pneumatic Gel Muscles and Stance Phase Detection System to Assist Gait. IEEE Robot. Autom. Lett. 2018, 3, 4257–4264. [Google Scholar] [CrossRef]
- Ma, B.; Li, C.; Wu, Z.; Huang, Y. A PWM-Based Muscle Fatigue Detection and Recovery System. In Proceedings of the 2018 International Conference on Bioinformatics and Biomedicine (BIBM), Madrid, Spain, 3–6 December 2018; pp. 1013–1016. [Google Scholar]
- Farina, D.; Yoshida, K.; Stieglitz, T.; Koch, K.P. Multichannel thin-film electrode for intramuscular electromyographic recordings. J. Appl. Physiol. 2008, 104, 821–827. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, J.; Wang, H.; Hua, C. Electroencephalography based fatigue detection using a novel feature fusion and extreme learning machine. Cogn. Syst. Res. 2018, 52, 715–728. [Google Scholar] [CrossRef]
- Lahiri, R.; Rakshit, P.; Konar, A. Evolutionary perspective for optimal selection of EEG electrodes and features. Biomed. Signal Process. Control 2017, 36, 113–137. [Google Scholar] [CrossRef]
- Haque, M.A.; Nasrollahi, K.; Moeslund, T.B.; Irani, R. Facial video-based detection of physical fatigue for maximal muscle activity. IET Comput. Vis. 2016, 10, 323–330. [Google Scholar] [CrossRef]
- Chang, W.-J.; Chen, L.-B.; Chiou, Y.-Z. Design and Implementation of a Drowsiness-Fatigue-Detection System Based on Wearable Smart Glasses to Increase Road Safety. IEEE Trans. Consum. Electron. 2018, 64, 461–469. [Google Scholar] [CrossRef]
- Sampei, K.; Ogawa, M.; Torres, C.; Sato, M.; Miki, N. Mental Fatigue Monitoring Using a Wearable Transparent Eye Detection System. Micromachines 2016, 7, 20. [Google Scholar] [CrossRef]
- Huang, S.; Li, J.; Zhang, P.; Zhang, W. Detection of mental fatigue state with wearable ECG devices. Int. J. Med. Inform. 2018, 119, 39–46. [Google Scholar] [CrossRef]
- Sharma, M.K.; Bundele, M.M. Design & analysis of K-means algorithm for cognitive fatigue detection in vehicular driver using Respiration signal. In Proceedings of the 2015 IEEE International Conference on Electrical, Computer and Communication Technologies (ICECCT), Coimbatore, India, 10–12 September 2015; pp. 1–6. [Google Scholar]
- Greco, A.; Valenza, G.; Bicchi, A.; Bianchi, M.; Scilingo, E.P. Assessment of muscle fatigue during isometric contraction using autonomic nervous system correlates. Biomed. Signal. Process. Control. 2019, 51, 42–49. [Google Scholar] [CrossRef]
- Wang, D.; Shen, P.; Wang, T.; Xiao, Z. Fatigue detection of vehicular driver through skin conductance, pulse oximetry and respiration: A random forest classifier. In Proceedings of the 2017 IEEE 9th International Conference on Communication Software and Networks (ICCSN), GuangZhou, China, 6–8 May 2017; pp. 1162–1166. [Google Scholar]
- Tiwari, A.; Falk, T.H. Fusion of Motif- and Spectrum-Related Features for Improved EEG-Based Emotion Recognition. Comput. Intell. Neurosci. 2019, 2019, 3076324. [Google Scholar] [CrossRef] [PubMed]
- Shu, L.; Xie, J.; Yang, M.; Li, Z.; Li, Z.; Liao, D.; Xu, X.; Yang, X. A Review of Emotion Recognition Using Physiological Signals. Sensors 2018, 18, 2074. [Google Scholar] [CrossRef] [PubMed]
- Benitez-Garcia, G.; Nakamura, T.; Kaneko, M. Multicultural Facial Expression Recognition Based on Differences of Western-Caucasian and East-Asian Facial Expressions of Emotions. IEICE Trans. Inf. Syst. 2018, E101.D, 1317–1324. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.; Lei, Z.; Wan, J.; Avots, E.; Hajarolasvadi, N.; Knyazev, B.; Kuharenko, A.; Jacques Junior, J.C.S.; Baro, X.; Demirel, H.; et al. Dominant and Complementary Emotion Recognition from Still Images of Faces. IEEE Access 2018, 6, 26391–26403. [Google Scholar] [CrossRef]
- Lan, Z.; Sourina, O.; Wang, L.; Liu, Y. Real-time EEG-based emotion monitoring using stable features. Vis. Comput. 2016, 32, 347–358. [Google Scholar] [CrossRef]
- García-Ramírez, J.; Olvera-López, J.A.; Olmos-Pineda, I.; Martín-Ortíz, M. Mouth and eyebrow segmentation for emotion recognition using interpolated polynomials. J. Intell. Fuzzy Syst. 2018, 34, 3119–3131. [Google Scholar] [CrossRef]
- Wei, W.; Jia, Q.; Feng, Y.; Chen, G. Emotion Recognition Based on Weighted Fusion Strategy of Multichannel Physiological Signals. Comput. Intell. Neurosci. 2018, 2018, 5296523. [Google Scholar] [CrossRef]
- Huang, Y.; Yang, J.; Liao, P.; Pan, J. Fusion of Facial Expressions and EEG for Multimodal Emotion Recognition. Comput. Intell. Neurosci. 2017, 2017, 2107451. [Google Scholar] [CrossRef]
- Wu, W.; Zhang, H.; Pirbhulal, S.; Mukhopadhyay, S.C.; Zhang, Y.-T. Assessment of Biofeedback Training for Emotion Management Through Wearable Textile Physiological Monitoring System. IEEE Sens. J. 2015, 15, 7087–7095. [Google Scholar] [CrossRef]
- Guo, H.-W.; Huang, Y.-S.; Lin, C.-H.; Chien, J.-C.; Haraikawa, K.; Shieh, J.-S. Heart Rate Variability Signal Features for Emotion Recognition by Using Principal Component Analysis and Support Vectors Machine. In Proceedings of the 2016 IEEE 16th International Conference on Bioinformatics and Bioengineering (BIBE), Taichung, Taiwan, 31 October–2 November 2016; pp. 274–277. [Google Scholar]
- Das, P.; Khasnobish, A.; Tibarewala, D.N. Emotion recognition employing ECG and GSR signals as markers of ANS. In Proceedings of the 2016 Conference on Advances in Signal Processing (CASP), Pune, India, 9–11 June 2016; pp. 37–42. [Google Scholar]
- Wen, W.; Liu, G.; Cheng, N.; Wei, J.; Shangguan, P.; Huang, W. Emotion Recognition Based on Multi-Variant Correlation of Physiological Signals. IEEE Trans. Affect. Comput. 2014, 5, 126–140. [Google Scholar] [CrossRef]
- Xu, Y.; Hubener, I.; Seipp, A.-K.; Ohly, S.; David, K. From the lab to the real-world: An investigation on the influence of human movement on Emotion Recognition using physiological signals. In Proceedings of the 2017 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kona, HI, USA, 13–17 March 2017; pp. 345–350. [Google Scholar]
- Li, C.; Xu, C.; Feng, Z. Analysis of physiological for emotion recognition with the IRS model. Neurocomputing 2016, 178, 103–111. [Google Scholar] [CrossRef]
- Yin, Z.; Zhao, M.; Wang, Y.; Yang, J.; Zhang, J. Recognition of emotions using multimodal physiological signals and an ensemble deep learning model. Comput. Methods Programs Biomed. 2017, 140, 93–110. [Google Scholar] [CrossRef] [PubMed]
- Wu, W.; Pirbhulal, S.; Zhang, H.; Mukhopadhyay, S.C. Quantitative Assessment for Self-Tracking of Acute Stress Based on Triangulation Principle in a Wearable Sensor System. IEEE J. Biomed. Health Inform. 2018, 23, 703–713. [Google Scholar] [CrossRef] [PubMed]
- Khezri, M.; Firoozabadi, M.; Sharafat, A.R. Reliable emotion recognition system based on dynamic adaptive fusion of forehead biopotentials and physiological signals. Comput. Methods Programs Biomed. 2015, 122, 149–164. [Google Scholar] [CrossRef] [PubMed]
- Chao, H.; Zhi, H.; Dong, L.; Liu, Y. Recognition of Emotions Using Multichannel EEG Data and DBN-GC-Based Ensemble Deep Learning Framework. Comput. Intell. Neurosci. 2018, 2018, 9750904. [Google Scholar] [CrossRef] [PubMed]
- Mert, A.; Akan, A. Emotion recognition based on time–frequency distribution of EEG signals using multivariate synchrosqueezing transform. Digit. Signal Process. 2018, 81, 106–115. [Google Scholar] [CrossRef]
- Nakisa, B.; Rastgoo, M.N.; Tjondronegoro, D.; Chandran, V. Evolutionary computation algorithms for feature selection of EEG-based emotion recognition using mobile sensors. Expert Syst. Appl. 2018, 93, 143–155. [Google Scholar] [CrossRef] [Green Version]
- Purnamasari, P.; Ratna, A.; Kusumoputro, B. Development of Filtered Bispectrum for EEG Signal Feature Extraction in Automatic Emotion Recognition Using Artificial Neural Networks. Algorithms 2017, 10, 63. [Google Scholar] [CrossRef]
- Li, X.; Hong, X.; Moilanen, A.; Huang, X.; Pfister, T.; Zhao, G.; Pietikainen, M. Towards Reading Hidden Emotions: A Comparative Study of Spontaneous Micro-Expression Spotting and Recognition Methods. IEEE Trans. Affect. Comput. 2018, 9, 563–577. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Choudhury, D.; Dey, D. Edge-enhanced bi-dimensional empirical mode decomposition-based emotion recognition using fusion of feature set. Soft Comput. 2018, 22, 889–903. [Google Scholar] [CrossRef]
- Valenza, G.; Citi, L.; Lanatá, A.; Scilingo, E.P.; Barbieri, R. Revealing Real-Time Emotional Responses: A Personalized Assessment based on Heartbeat Dynamics. Sci. Rep. 2015, 4, 4998. [Google Scholar] [CrossRef] [PubMed]
- Wu, S.; Xu, X.; Shu, L.; Hu, B. Estimation of valence of emotion using two frontal EEG channels. In Proceedings of the 2017 IEEE International Conference on Bioinformatics and Biomedicine (BIBM), Kansas City, MO, USA, 13–16 November 2017; pp. 1127–1130. [Google Scholar]
- Shin, D.; Shin, D.; Shin, D. Development of emotion recognition interface using complex EEG/ECG bio-signal for interactive contents. Multimed. Tools Appl. 2017, 76, 11449–11470. [Google Scholar] [CrossRef]
- Liu, L.; Lei, X.; Chen, B.; Shu, L. Human Action Recognition Based on Inertial Sensors and Complexity Classification. J. Inf. Technol. Res. 2019, 12, 18–35. [Google Scholar] [CrossRef]
- Heldt, T.; Oefinger, M.B.; Hoshiyama, M.; Mark, R.G. Circulatory response to passive and active changes in posture. In Proceedings of the Computers in Cardiology, 2003, Thessaloniki Chalkidiki, Greece, 21–24 September 2003; pp. 263–266. [Google Scholar]
- Aziz, O.; Musngi, M.; Park, E.J.; Mori, G.; Robinovitch, S.N. A comparison of accuracy of fall detection algorithms (threshold-based vs. machine learning) using waist-mounted tri-axial accelerometer signals from a comprehensive set of falls and non-fall trials. Med. Biol. Eng. Comput. 2017, 55, 45–55. [Google Scholar] [CrossRef] [PubMed]
- Teufl, W.; Lorenz, M.; Miezal, M.; Taetz, B.; Fröhlich, M.; Bleser, G. Towards Inertial Sensor Based Mobile Gait Analysis: Event-Detection and Spatio-Temporal Parameters. Sensors 2018, 19, 38. [Google Scholar] [CrossRef] [PubMed]
- Tao, S.; Zhang, X.; Cai, H.; Lv, Z.; Hu, C.; Xie, H. Gait based biometric personal authentication by using MEMS inertial sensors. J. Ambient Intell. Humaniz. Comput. 2018, 9, 1705–1712. [Google Scholar] [CrossRef]
- Al-Okby, M.F.R.; Neubert, S.; Stoll, N.; Thurow, K. Complementary functions for intelligent wheelchair head tilts controller. In Proceedings of the 2017 IEEE 15th International Symposium on Intelligent Systems and Informatics (SISY), Subotica, Serbia, 14–16 September 2017; pp. 000117–000122. [Google Scholar]
- Scott, T.R.D.; Vare, V.A. A novel five degree of freedom user command controller in people with spinal cord injury and non-injured for full upper extremity neuroprostheses, wearable powered orthoses and prosthetics. Med. Biol. Eng. Comput. 2013, 51, 317–330. [Google Scholar] [CrossRef]
- Stančić, I.; Musić, J.; Grujić, T. Gesture recognition system for real-time mobile robot control based on inertial sensors and motion strings. Eng. Appl. Artif. Intell. 2017, 66, 33–48. [Google Scholar] [CrossRef]
- Lin, B.-S.; Lee, I.-J.; Yang, S.-Y.; Lo, Y.-C.; Lee, J.; Chen, J.-L. Design of an Inertial-Sensor-Based Data Glove for Hand Function Evaluation. Sensors 2018, 18, 1545. [Google Scholar] [CrossRef]
- Ko, H.K.; Lee, S.W.; Koo, D.H.; Lee, I.; Hyun, D.J. Waist-assistive exoskeleton powered by a singular actuation mechanism for prevention of back-injury. Robot. Auton. Syst. 2018, 107, 1–9. [Google Scholar] [CrossRef]
- Inose, H.; Mohri, S.; Arakawa, H.; Okui, M.; Koide, K.; Yamada, Y.; Kikutani, I.; Nakamura, T. Semi-endoskeleton-type waist assist AB-wear suit equipped with compressive force reduction mechanism. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6014–6019. [Google Scholar]
- Kondo, S.; Ikeura, R.; Tachi, A.; Murakami, K.; Hayakawa, S.; Yasuda, K. Development and evaluation of waist assist device for shipbuilding tasks. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 1642–1647. [Google Scholar]
- Ancillao, A.; Tedesco, S.; Barton, J.; O’Flynn, B. Indirect Measurement of Ground Reaction Forces and Moments by Means of Wearable Inertial Sensors: A Systematic Review. Sensors 2018, 18, 2564. [Google Scholar] [CrossRef] [PubMed]
- Abdul Razak, A.H.; Zayegh, A.; Begg, R.K.; Wahab, Y. Foot Plantar Pressure Measurement System: A Review. Sensors 2012, 12, 9884–9912. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Atrsaei, A.; Salarieh, H.; Alasty, A.; Abediny, M. Human Arm Motion Tracking by Inertial/Magnetic Sensors Using Unscented Kalman Filter and Relative Motion Constraint. J. Intell. Robot. Syst. 2018, 90, 161–170. [Google Scholar] [CrossRef]
- McGrath, T.; Fineman, R.; Stirling, L. An Auto-Calibrating Knee Flexion-Extension Axis Estimator Using Principal Component Analysis with Inertial Sensors. Sensors 2018, 18, 1882. [Google Scholar] [CrossRef] [PubMed]
- Pratt, K.; Sigward, S. Inertial Sensor Angular Velocities Reflect Dynamic Knee Loading during Single Limb Loading in Individuals Following Anterior Cruciate Ligament Reconstruction. Sensors 2018, 18, 3460. [Google Scholar] [CrossRef] [PubMed]
- Pires, I.M.; Felizardo, V.; Pombo, N.; Drobics, M.; Garcia, N.M.; Flórez-Revuelta, F. Validation of a method for the estimation of energy expenditure during physical activity using a mobile device accelerometer. J. Ambient Intell. Smart Environ. 2018, 10, 315–326. [Google Scholar] [CrossRef]
- Shu, Y.; Chen, C.; Shu, K.-I.; Zhang, H. Research on Human Motion Recognition Based on Wi-Fi and Inertial Sensor Signal Fusion. In Proceedings of the 2018 IEEE SmartWorld, Ubiquitous Intelligence & Computing, Advanced & Trusted Computing, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), Guangzhou, China, 8–12 October 2018; pp. 496–504. [Google Scholar]
- Sousa Lima, W.; de Souza Bragança, H.; Montero Quispe, K.; Pereira Souto, E. Human Activity Recognition Based on Symbolic Representation Algorithms for Inertial Sensors. Sensors 2018, 18, 4045. [Google Scholar] [CrossRef]
- Ding, R.; He, Q.; Liu, H.; Liu, M. Combining Adaptive Hierarchical Depth Motion Maps with Skeletal Joints for Human Action Recognition. IEEE Access 2019, 7, 5597–5608. [Google Scholar] [CrossRef]
- Tariq, M.; Majeed, H.; Beg, M.O.; Khan, F.A.; Derhab, A. Accurate detection of sitting posture activities in a secure IoT based assisted living environment. Future Gener. Comput. Syst. 2019, 92, 745–757. [Google Scholar] [CrossRef]
- Lin, H.-Y.; Hsuen, Y.-L.; Lie, W.-N. Convolutional Recurrent Neural Networks for Posture Analysis in Fall Detection. J. Inf. Sci. Eng. 2018, 34, 577–591. [Google Scholar]
- Hsu, Y.-L.; Yang, S.-C.; Chang, H.-C.; Lai, H.-C. Human Daily and Sport Activity Recognition Using a Wearable Inertial Sensor Network. IEEE Access 2018, 6, 31715–31728. [Google Scholar] [CrossRef]
- Rodriguez-Martin, D.; Samà, A.; Perez-Lopez, C.; Català, A.; Cabestany, J.; Rodriguez-Molinero, A. SVM-based posture identification with a single waist-located triaxial accelerometer. Expert Syst. Appl. 2013, 40, 7203–7211. [Google Scholar] [CrossRef]
- Prawiro, E.A.P.J.; Chou, N.-K.; Lee, M.-W.; Lin, Y.-H. A Wearable System That Detects Posture and Heart Rate: Designing an Integrated Device with Multiparameter Measurements for Better Health Care. IEEE Consum. Electron. Mag. 2019, 8, 78–83. [Google Scholar] [CrossRef]
- Rescio, G.; Leone, A.; Siciliano, P. Supervised machine learning scheme for electromyography-based pre-fall detection system. Expert Syst. Appl. 2018, 100, 95–105. [Google Scholar] [CrossRef]
- Abdalsalam, M.E.; Yusoff, M.Z.; Mahmoud, D.; Malik, A.S.; Bahloul, M.R. Discrimination of four class simple limb motor imagery movements for brain–computer interface. Biomed. Signal Process. Control 2018, 44, 181–190. [Google Scholar] [CrossRef]
- Samuel, O.W.; Asogbon, M.G.; Geng, Y.; Al-Timemy, A.H.; Pirbhulal, S.; Ji, N.; Chen, S.; Fang, P.; Li, G. Intelligent EMG Pattern Recognition Control Method for Upper-Limb Multifunctional Prostheses: Advances, Current Challenges, and Future Prospects. IEEE Access 2019, 7, 10150–10165. [Google Scholar] [CrossRef]
- Fujiwara, E.; Suzuki, C.K. Optical Fiber Force Myography Sensor for Identification of Hand Postures. J. Sens. 2018, 2018, 8940373. [Google Scholar] [CrossRef]
- Parrington, L.; Jehu, D.A.; Fino, P.C.; Pearson, S.; El-Gohary, M.; King, L.A. Validation of an Inertial Sensor Algorithm to Quantify Head and Trunk Movement in Healthy Young Adults and Individuals with Mild Traumatic Brain Injury. Sensors 2018, 18, 4501. [Google Scholar] [CrossRef]
- Huaroto, J.J.; Suarez, E.; Krebs, H.I.; Marasco, P.D.; Vela, E.A. A Soft Pneumatic Actuator as a Haptic Wearable Device for Upper Limb Amputees: Toward a Soft Robotic Liner. IEEE Robot. Autom. Lett. 2019, 4, 17–24. [Google Scholar] [CrossRef]
- Faber, G.S.; Kingma, I.; Martin Schepers, H.; Veltink, P.H.; van Dieën, J.H. Determination of joint moments with instrumented force shoes in a variety of tasks. J. Biomech. 2010, 43, 2848–2854. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Zhang, P.; Guo, J.; Li, X.; Wang, J.; Yang, F.; Wang, X. A New Method of High-Precision Positioning for an Indoor Pseudolite without Using the Known Point Initialization. Sensors 2018, 18, 1977. [Google Scholar] [CrossRef] [PubMed]
- Shieh, W.-Y.; Hsu, C.-C.J.; Lin, C.-H.; Wang, T.-H. Investigation of Vehicle Positioning by Infrared Signal-Direction Discrimination for Short-Range Vehicle-to-Vehicle Communications. IEEE Trans. Veh. Technol. 2018, 67, 11563–11574. [Google Scholar] [CrossRef]
- Lee, C.-W.; Chondro, P.; Ruan, S.-J.; Christen, O.; Naroska, E. Improving Mobility for the Visually Impaired: A Wearable Indoor Positioning System Based on Visual Markers. IEEE Consum. Electron. Mag. 2018, 7, 12–20. [Google Scholar] [CrossRef]
- Buffi, A.; Motroni, A.; Nepa, P.; Tellini, B.; Cioni, R. A SAR-Based Measurement Method for Passive-Tag Positioning with a Flying UHF-RFID Reader. IEEE Trans. Instrum. Meas. 2019, 68, 845–853. [Google Scholar] [CrossRef]
- Yin, Z.; Jiang, X.; Yang, Z.; Zhao, N.; Chen, Y. WUB-IP: A High-Precision UWB Positioning Scheme for Indoor Multiuser Applications. IEEE Syst. J. 2019, 13, 279–288. [Google Scholar] [CrossRef]
- Lu, C.; Uchiyama, H.; Thomas, D.; Shimada, A.; Taniguchi, R. Indoor Positioning System Based on Chest-Mounted IMU. Sensors 2019, 19, 420. [Google Scholar] [CrossRef]
- Huang, H.; Lee, D.H.; Chang, K.; Li, W.; Acharya, T.D. Development of mobile platform for indoor positioning reference map using geomagnetic field data. Comput. Electr. Eng. 2018, 68, 557–569. [Google Scholar] [CrossRef]
- Zhu, B.; Cheng, J.; Wang, Y.; Yan, J.; Wang, J. Three-Dimensional VLC Positioning Based on Angle Difference of Arrival with Arbitrary Tilting Angle of Receiver. IEEE J. Sel. Areas Commun. 2018, 36, 8–22. [Google Scholar] [CrossRef]
- Lopes, S.I.; Vieira, J.M.N.; Albuquerque, D. High Accuracy 3D Indoor Positioning Using Broadband Ultrasonic Signals. In Proceedings of the 2012 IEEE 11th International Conference on Trust, Security and Privacy in Computing and Communications, Liverpool, UK, 25–27 June 2012; pp. 2008–2014. [Google Scholar]
- Kanjo, E.; Younis, E.M.G.; Sherkat, N. Towards unravelling the relationship between on-body, environmental and emotion data using sensor information fusion approach. Inf. Fusion 2018, 40, 18–31. [Google Scholar] [CrossRef]
- Abdelzaher, T.; Ayanian, N.; Basar, T.; Diggavi, S.; Diesner, J.; Ganesan, D.; Govindan, R.; Jha, S.; Lepoint, T.; Marlin, B.; et al. Toward an Internet of Battlefield Things: A Resilience Perspective. Computer 2018, 51, 24–36. [Google Scholar] [CrossRef]
- Kutilek, P.; Volf, P.; Viteckova, S.; Smrcka, P.; Krivanek, V.; Lhotska, L.; Hana, K.; Doskocil, R.; Navratil, L.; Hon, Z.; et al. Wearable systems for monitoring the health condition of soldiers: Review and application. In Proceedings of the 2017 International Conference on Military Technologies (ICMT), Brno, Czech Republic, 31 May–2 June 2017; pp. 748–752. [Google Scholar]
- Moulik, S.; Misra, S.; Chakraborty, C. CAPCoS: Context-aware PAN coordinator selection for health monitoring of soldiers in battlefield. In Proceedings of the 2015 IEEE International Conference on Advanced Networks and Telecommuncations Systems (ANTS), Kolkata, India, 15–18 December 2015; pp. 1–6. [Google Scholar]
- Rozanowski, K.; Sondej, T.; Lewandowski, J. First approach for design of an autonomous measurement system to aid determination of the psychological profile of soldiers. In Proceedings of the 2015 22nd International Conference Mixed Design of Integrated Circuits & Systems (MIXDES), Torun, Poland, 25–27 June 2015; pp. 53–57. [Google Scholar]
Figure 1.
The multi-level fusion framework.

Figure 2.
The sensor deployment model based on the multi-level fusion framework (MLFF).

Figure 3.
The correlation between physiological signal characteristics and three negative emotions.

Figure 4.
The relationships among all of the framework units are determined based on a summary of the latest research results on wearable technology.
Figure 4.
The relationships among all of the framework units are determined based on a summary of the latest research results on wearable technology.


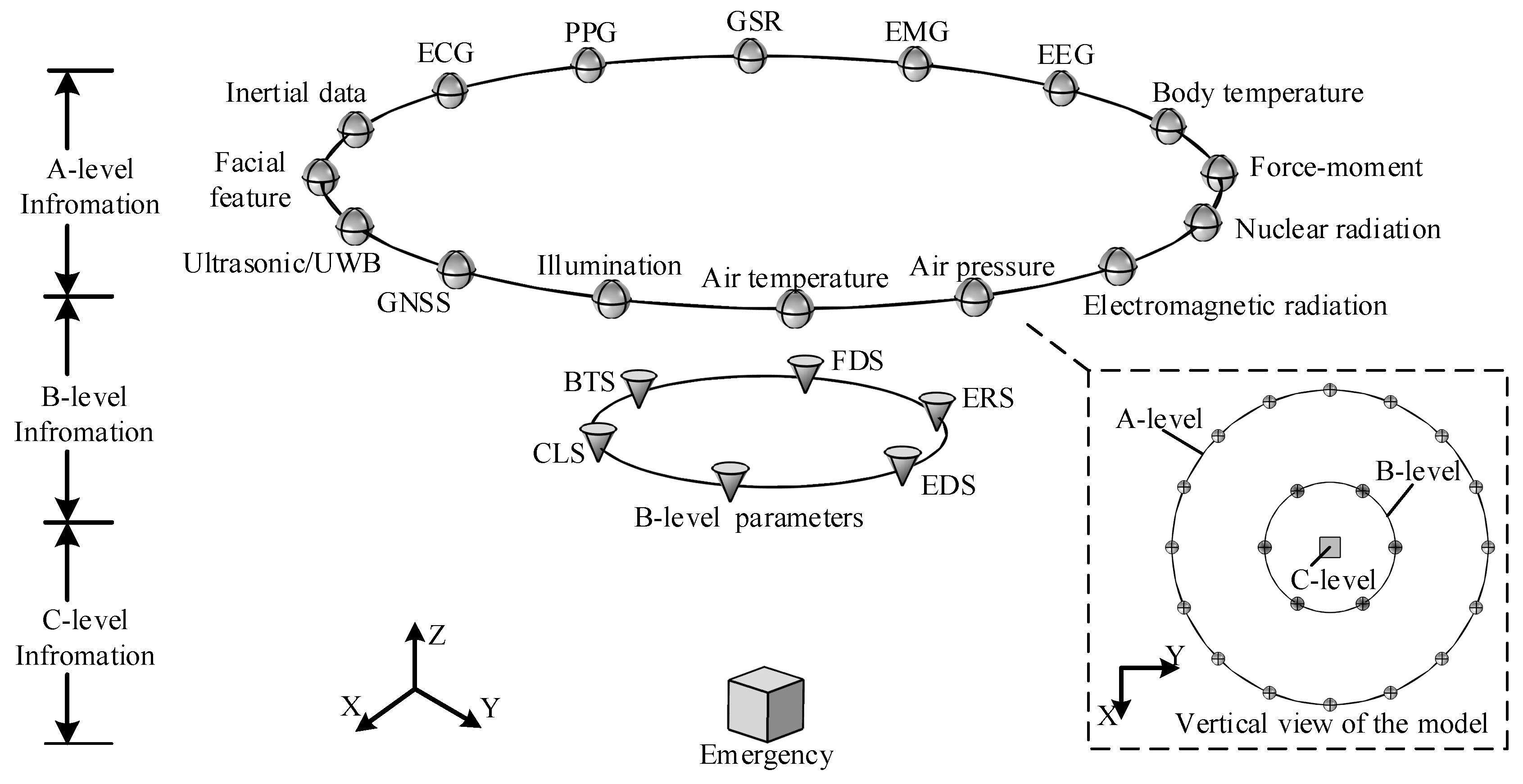{kind=link}
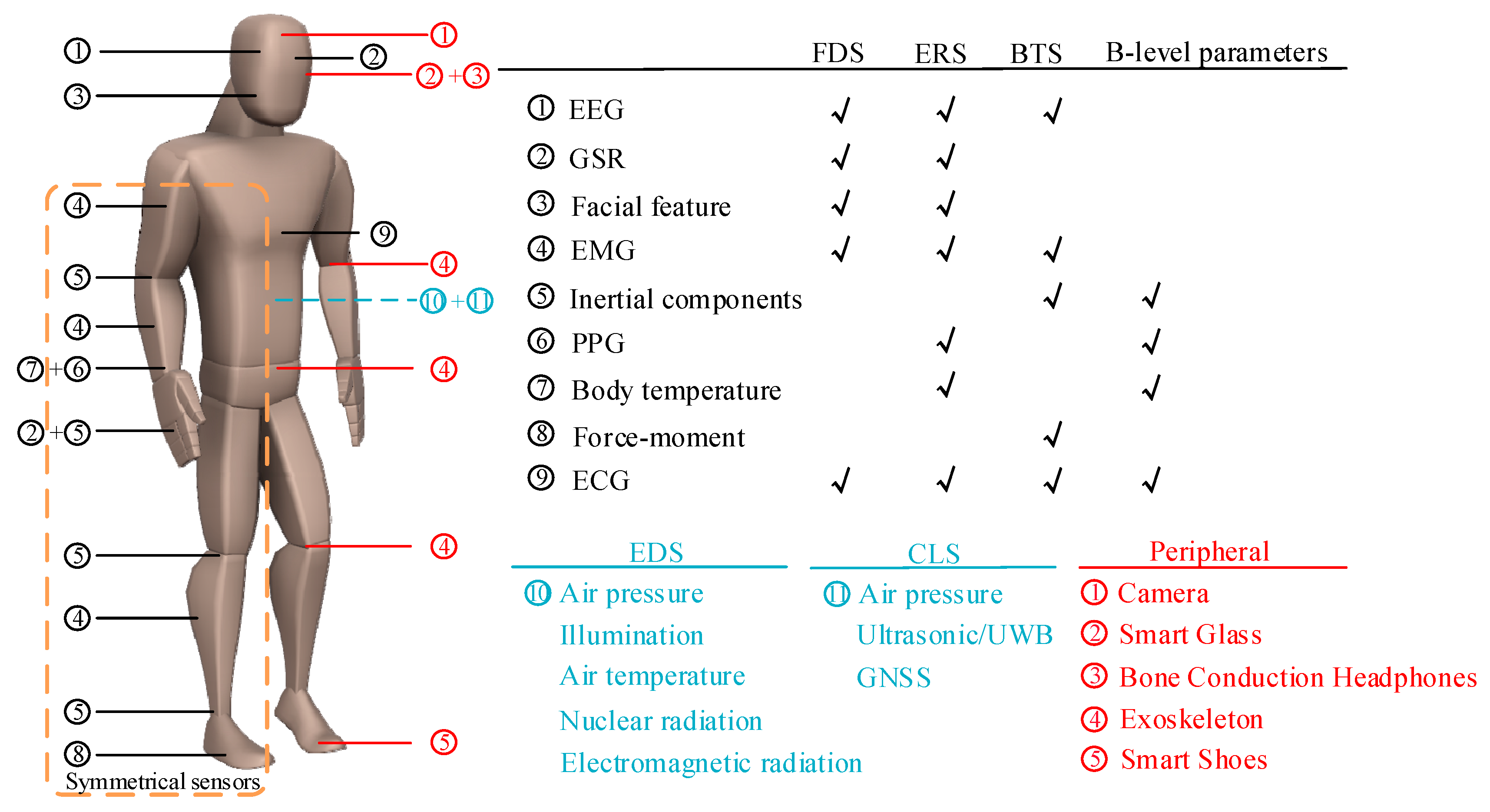{kind=link}
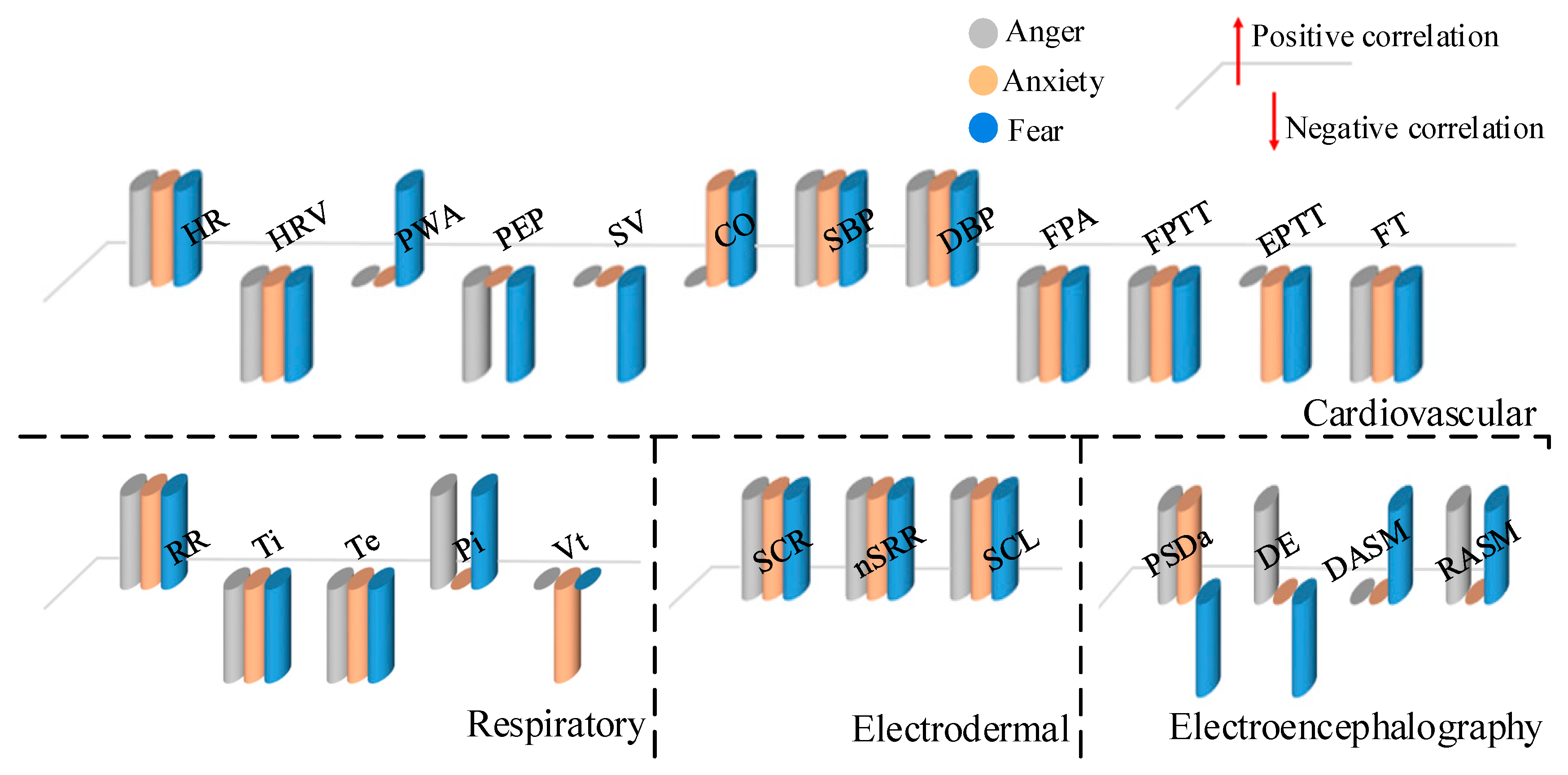{kind=link}
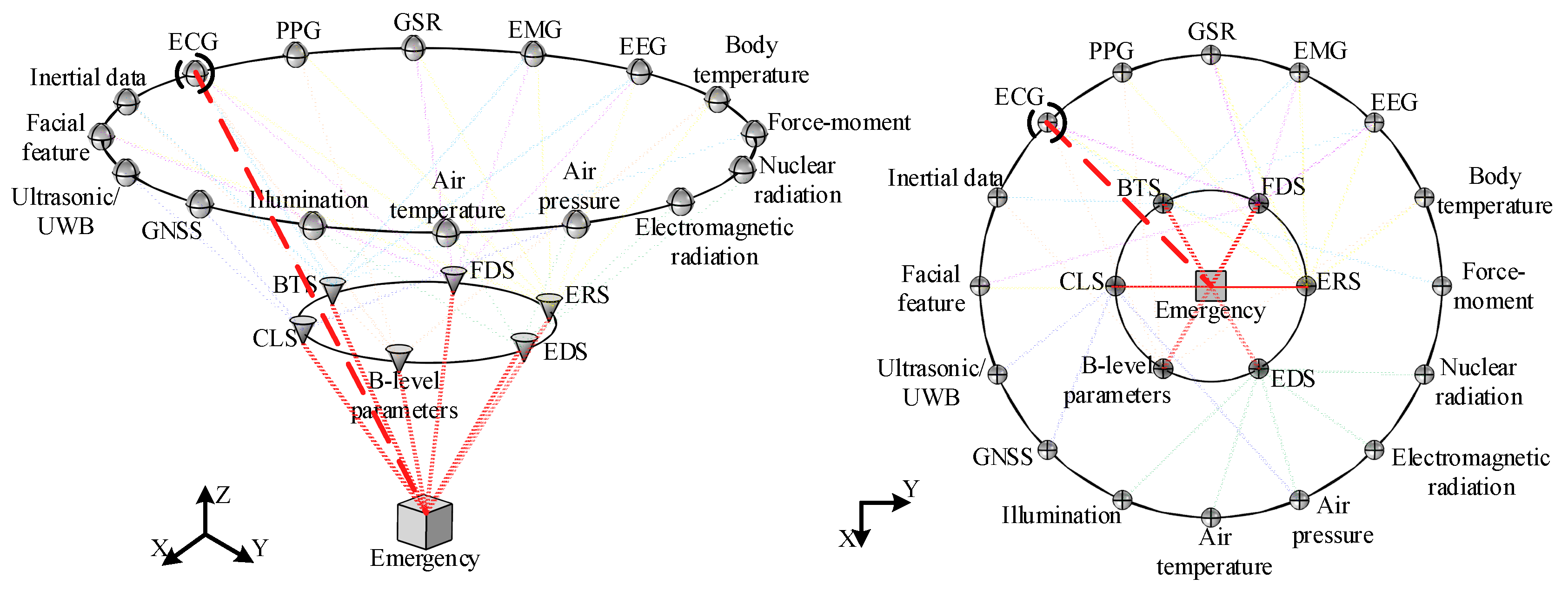{kind=link}
Table 1.
Existing research achievements on wearable devices for soldiers.
| Name | Research Unit | Type | Characteristic |
|---|---|---|---|
| LifeBEAM | LifeBEAM | Helmet | Uses an optical sensor to measure heart rate |
| CombatConnect | The Army’s Program Executive Office | Wearable electronics system | Distributes data and power to and from devices via a smart hub integrated into the vest or plate carrier |
| Black Hornet 3 | FLIR SYSTEM | Pocket-sized unmanned helicopter | An integrated camera that can be mounted on a squad member’s combat vest as an elevated set of binoculars |
| Ground Warfare Acoustical Combat System | Gwacs Defense | A wearable tactical system | Identifies and locates hostile fire; detects and tracks Small UAVs |
| ExoAtlet | ExoAtlet | Lower body powered exoskeletons | Provides mobility assistance and decreases the metabolic cost of movement |
| SPaRK | SpringActive | Energy-scavenging exoskeletons | The collected energy can be turned into electricity to recharge a battery or directly power a device |
Table 2.
Research directions for and the specific problems of Fatigue Detection Systems (FDSs).
| Research Direction | Specific Problem | Reference Scheme | Physiological Signal |
|---|---|---|---|
| Signal processing | Multi-component and nonstationary signals | [40] | EMG |
| Information mining | Low-level muscle fatigue | [41] | EMG |
| Local muscle analysis | [42] | EMG | |
| Stereoscopic visual fatigue | [43] | EEG | |
| Sensor optimization | Multichannel detection | [44,45] | EMG; EEG |
| Disposable electrode | [46] | EMG | |
| Detecting position | [47] | EEG | |
| Function extension | Unloaded muscle effort | [48] | EMG |
| Muscle recovery | [49] | EMG |
Table 3.
Research directions for and the specific problems of Emotion Recognition Systems (ERSs).
| Research Direction | Specific Problem | Reference Scheme | Physiological Signal |
|---|---|---|---|
| Signal processing | Time frequency analysis | [77,78] | EEG |
| Feature extraction | [60,79,80] | EEG | |
| Information mining | Influence of movement | [72] | EMG, ECG, GSR |
| Individual differences | [73] | ECG, GSR, PPG | |
| Cross-cultural differences | [62] | Facial features | |
| Micro-expression | [81,82] | Facial features | |
| Real-time recognition | [83] | ECG | |
| Sensor optimization | Multichannel detection | [84] | EEG |
| Function extension | Control interface | [85] | ECG, EEG |
Table 4.
Research problems based on different body parts.
| Body Parts | Function | Reference Scheme | Specific Problem | Sensor |
|---|---|---|---|---|
| Head | Monitoring | [116] | Movement characteristic | Inertial components |
| Extension | [91,92] | Man–machine interaction | BNO 055 orientation modules; Six DOF position sensor | |
| Hand | Monitoring | [94] | Hand function evaluation | Inertial components |
| Extension | [93,115] | Man–machine interaction | Inertial components; Optical fiber force myography sensor | |
| Arm | Monitoring | [100] | Movement characteristic | Inertial components |
| Extension | [114,117] | Man–machine interaction | EMG sensor; Pressure sensor | |
| Waist | Extension | [95,96,97] | Muscle fatigue and injury | Exoskeleton |
| Lower limb | Monitoring | [101] | Movement characteristic | Inertial components |
| Monitoring | [102] | Knee load | Inertial components | |
| Foot | Monitoring | [90] | Gait recognition | Inertial components |
| Extension | [118] | Injury (GRFs) | 3D force/moment sensors |
Table 5.
Short-range positioning techniques that satisfy local battlefield positioning conditions.
| Range | Error | Cost | Applicability | Restriction | |
|---|---|---|---|---|---|
| Inertial components | 1–100 m | <1% [124] | Low | Strong anti-interference ability; high utilization rate | Data processing; errors accumulate over time |
| Ultrasonic | 1–10 m | <20.2 cm [127] | High | Correction of inertial data; improvement of relative coordinates | Signal attenuates significantly in harsh environments |
| UWB | 1–50 m | <2 cm [123] | High | High penetration; high precision | Miniaturization of positioning devices |
| RFID | 1–50 m | <10 cm [122] | Low | Strong anti-interference ability | Hard to integrate with other systems |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Shi, H.; Zhao, H.; Liu, Y.; Gao, W.; Dou, S.-C. Systematic Analysis of a Military Wearable Device Based on a Multi-Level Fusion Framework: Research Directions. Sensors 2019, 19, 2651. https://doi.org/10.3390/s19122651
AMA Style
Shi H, Zhao H, Liu Y, Gao W, Dou S-C. Systematic Analysis of a Military Wearable Device Based on a Multi-Level Fusion Framework: Research Directions. Sensors. 2019; 19(12):2651. https://doi.org/10.3390/s19122651
Chicago/Turabian StyleShi, Han, Hai Zhao, Yang Liu, Wei Gao, and Sheng-Chang Dou. 2019. "Systematic Analysis of a Military Wearable Device Based on a Multi-Level Fusion Framework: Research Directions" Sensors 19, no. 12: 2651. https://doi.org/10.3390/s19122651
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.