A Love Wave Reflective Delay Line with Polymer Guiding Layer for Wireless Sensor Application

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theoretical analysis
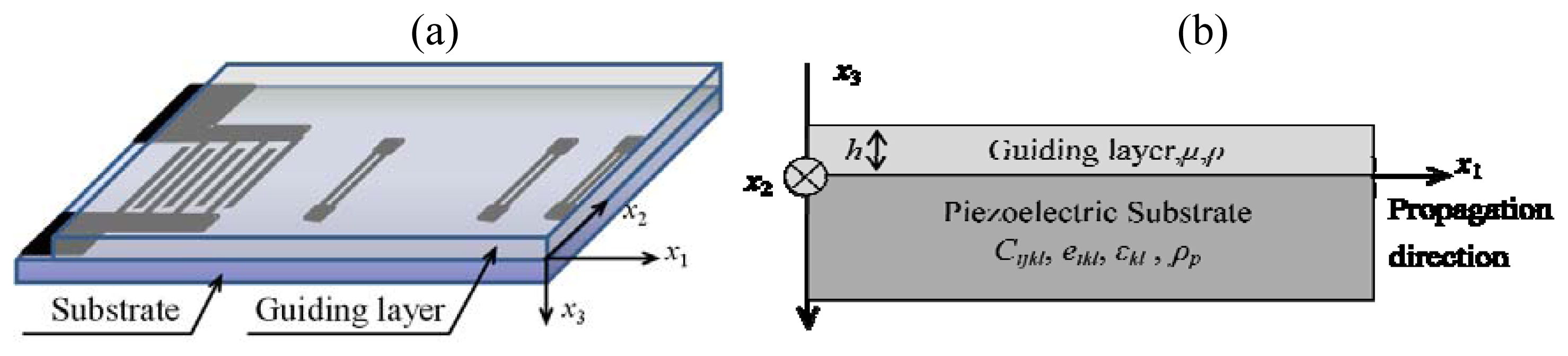
2.1. Love wave model
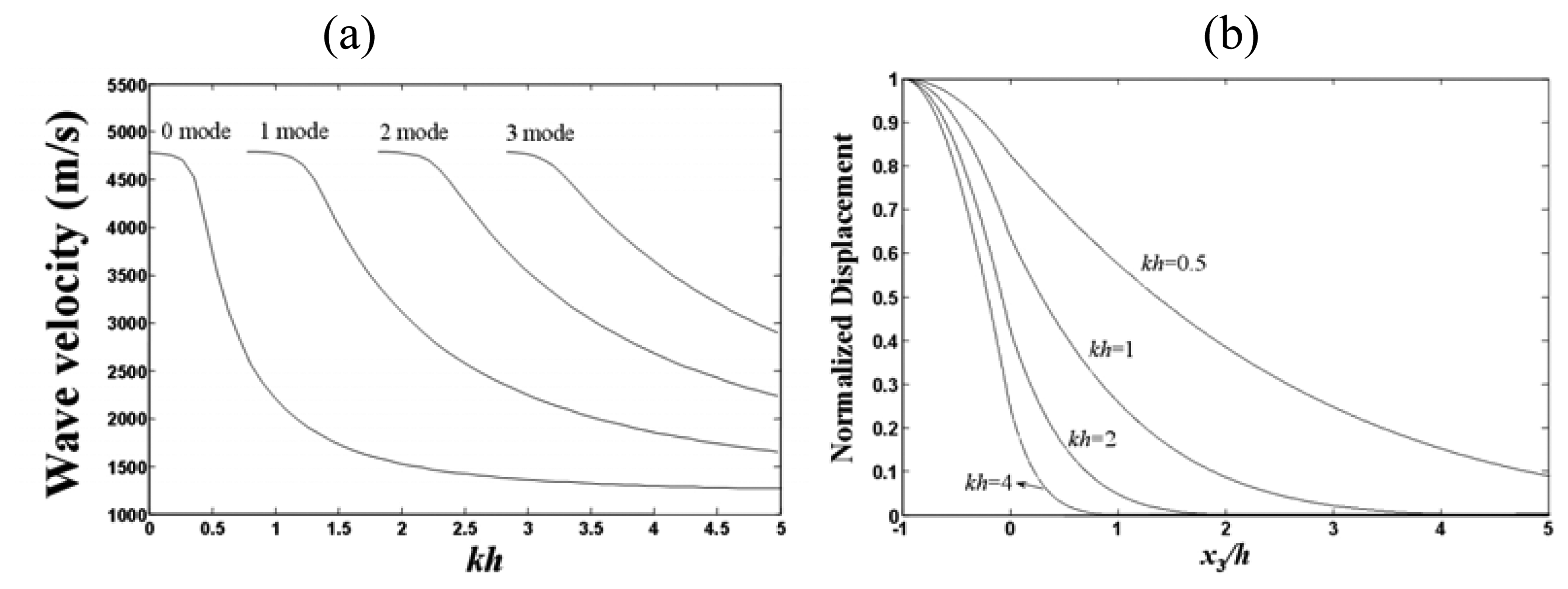
2.2. Dispersion relation
3. COM Analysis
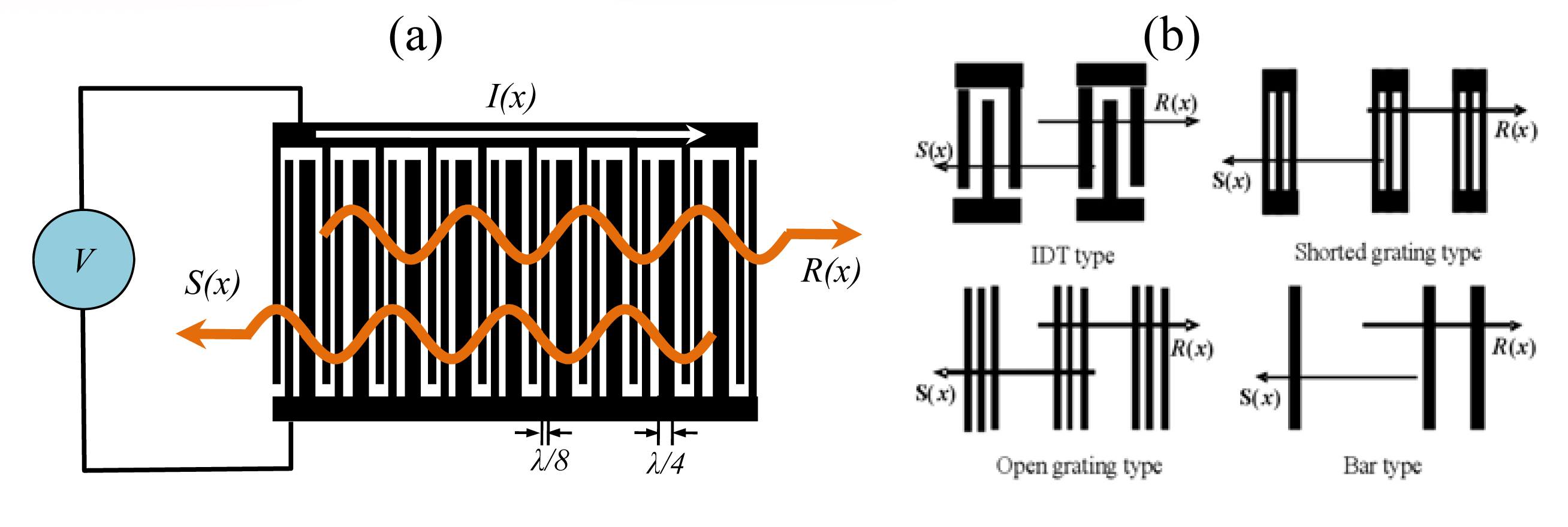
3.1. COM analysis for SPUDT
3.2. COM analysis for reflectors
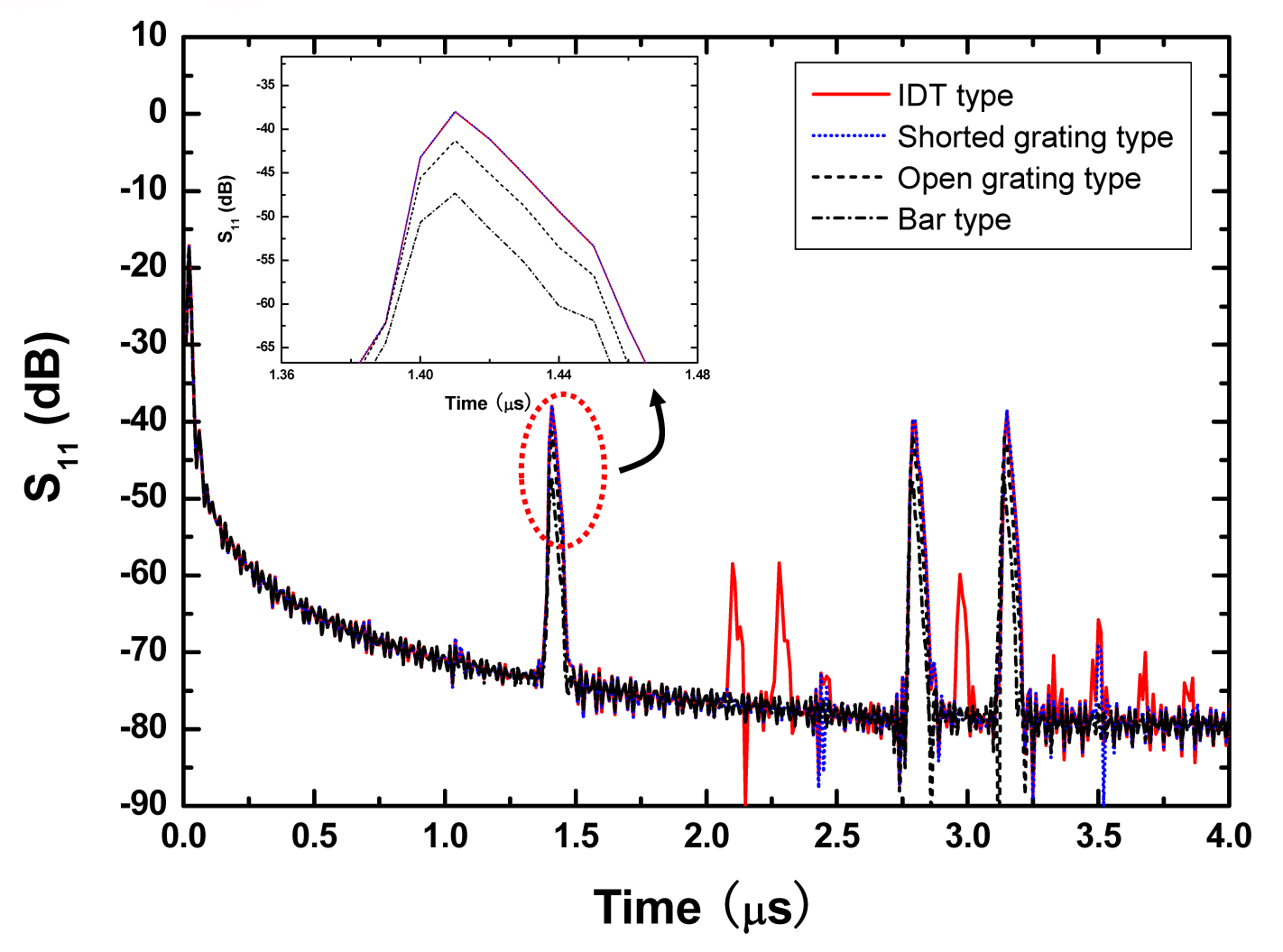
3.3. Reflection coefficient S11 of the reflective delay line
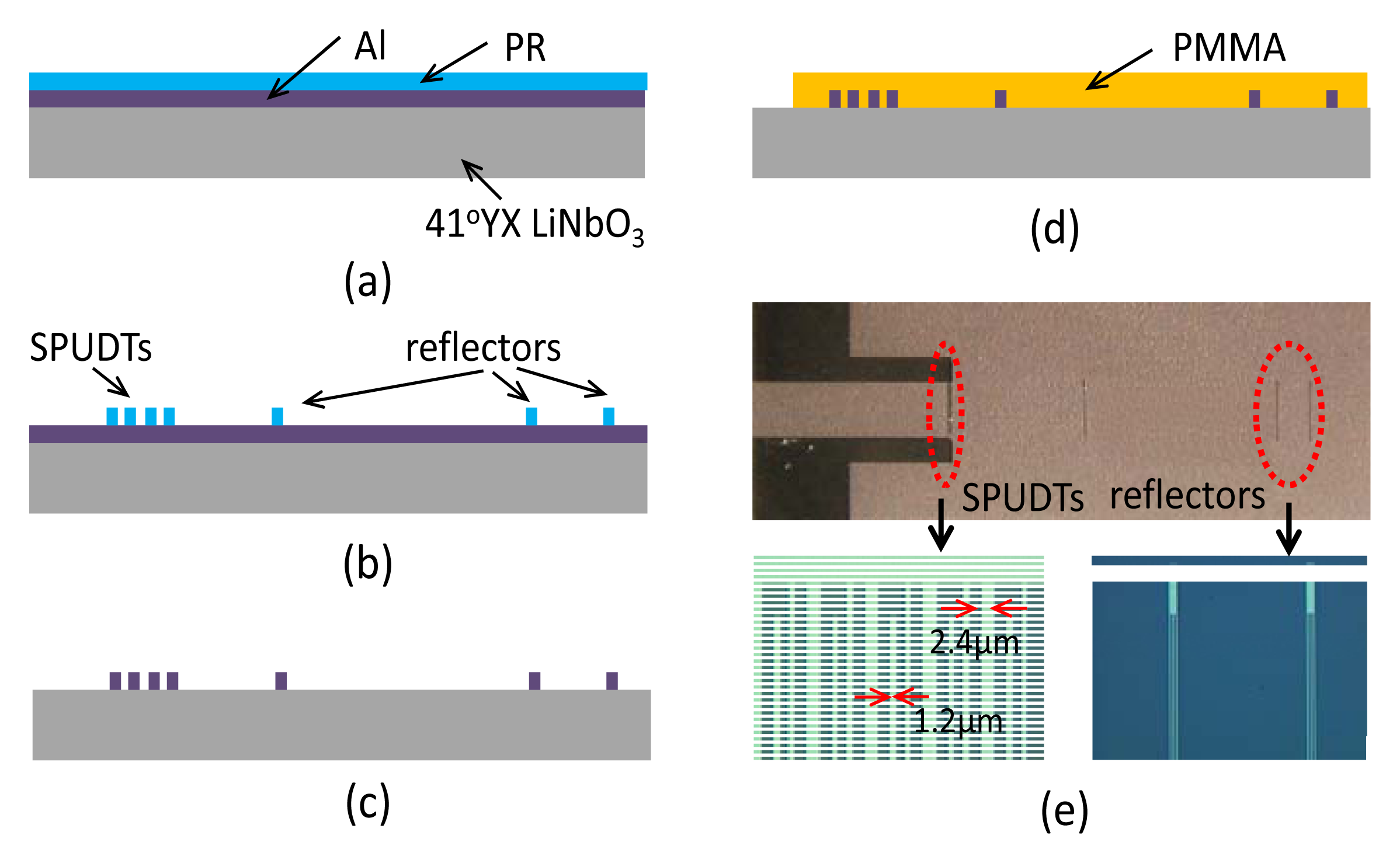
4. Technique Realization
4.1. SH SAW reflective delay line
4.2. PMMA waveguide layer
5. Results and Discussion
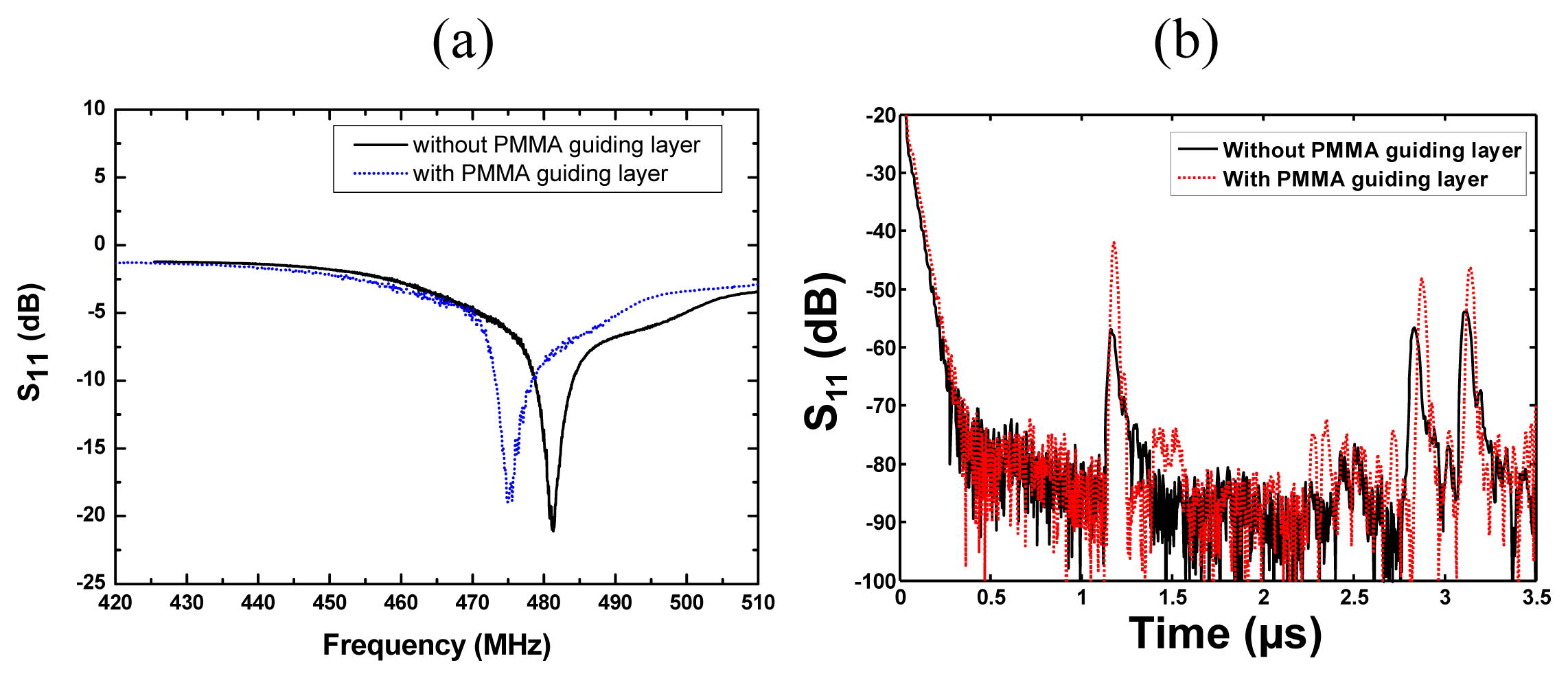
5.1. Electric measurement
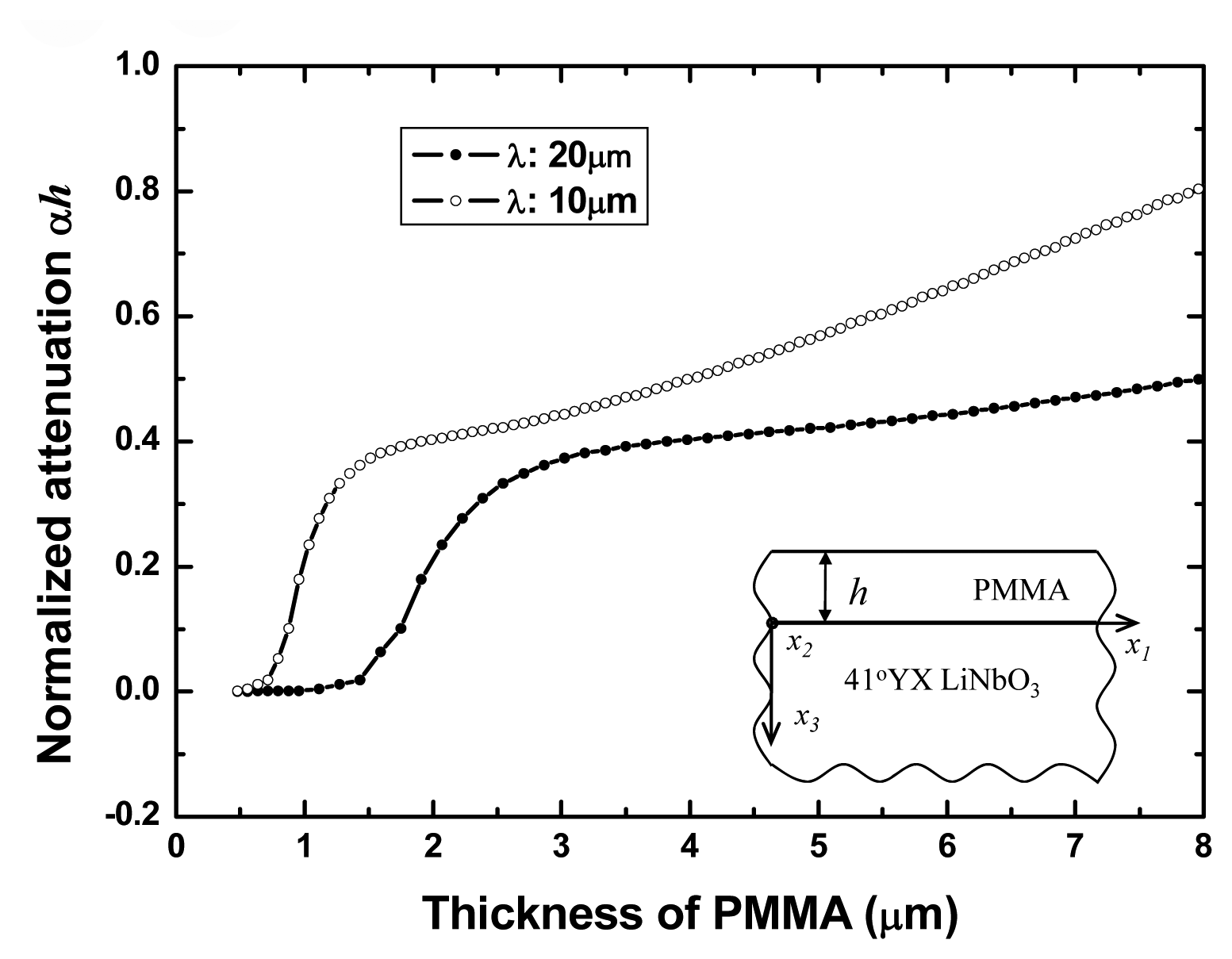
5.2. Waveguide thickness effect
6. Conclusion
Acknowledgments
References and Notes
- Jakoby, B.; Vellekoop, M.J. Properties of Love waves: applications in Sensors. Smart Mat. Struct. 1997, 6, 668–679. [Google Scholar]
- Kovacs, G.; Vellekoop, M.J.; Hauels, R. Love waves for (bio) chemical sensing in liquids. Sens. Actuat. A 1994, 43, 38–43. [Google Scholar]
- Zimmermann, C.; Rebiere, D.; Dejous, C. A love-wave gas sensor coated with functionalized polysiloxane for sensing organophpsphorus compounds. Sens. Actuat. B 2001, 76, 86–94. [Google Scholar]
- Jakoby, B.; Ismail, G.M.; Byfield, M.P. A novel molecularly imprinted thin film applied to a Love wave gas sensor. Sens. Actuat. 1999, 76, 93–97. [Google Scholar]
- Wen, W.; Lee, Lee.; Kim, T.; Yang, S. A novel wireless, passive CO2 sensor incorporating SAW reflective delay line. Smart Mat. Struct. 2007, 16, 1382–1389. [Google Scholar]
- Gizeli, E. Design considerations for the acoustic waveguide biosensor. Smart Mat. Struct. 1997, 6, 700–706. [Google Scholar]
- Hashimoto, K. Surface Acoustic Wave Devices in Telecommunications - Modeling and Simulation; Springer Verlag: New York, USA, 2000. [Google Scholar]
- Hartmann, C.S.; Wright, P.V. Overview of Design Challenges for Single Phase Unidirectional SAW Filters. IEEE Ultra. Sym. Proc 1989, 79–89. [Google Scholar]
- Royer, D.; Dieulesaint, E. Elastic Waves in Solids; Springer: Heidelberg, Germany, 2000. [Google Scholar]
- Zimmermann, C.; Rebiere, D.; Dejous, C. Love-waves to improve chemical sensors sensitivity: theoretical and experimental comparison of acoustic modes. IEEE Int. Fr. Equation Cont. Sym. Proc. 2002, 281–288. [Google Scholar]
- Wang, W.; He, S. Sensitivity Evaluation of a Love Wave Sensor with Multi-guiding-layer Structure for Biochemical Application. Sens. Transduc. J. 2008, 96, 32–41. [Google Scholar]
- Kielczynski, P. Attenuation of Love waves in low-loss media. J. Appl. Phys. 1997, 82, 5932–5937. [Google Scholar]
- Auld, B. Acoustic fields and waves in solids; Wiley: New York, USA, 1973; Volume 1. [Google Scholar]
- Plessky, V.; Koskela, J. Coupling-of-modes analysis of SAW devices. Int. J. High Speed Electron. Sys. 2000, 10, 867–947. [Google Scholar]
- Wright, P.V. Analysis and Design of Low-Loss SAW Devices with Internal Reflections Using Coupling-of-Modes Theory. IEEE Ultra. Sym. Proc. 1989, 141–152. [Google Scholar]
- Abbott, B.P.; Hartmann, C.S.; Malocha, D.C. A coupling-of-modes analysis of chirped transducers containing reflective electrode geometries. IEEE Ultrason. Symp. 1989, 129–134. [Google Scholar]










© 2008 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the CreativeCommons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Wang, W.; He, S. A Love Wave Reflective Delay Line with Polymer Guiding Layer for Wireless Sensor Application. Sensors 2008, 8, 7917-7929. https://doi.org/10.3390/s8127917
Wang W, He S. A Love Wave Reflective Delay Line with Polymer Guiding Layer for Wireless Sensor Application. Sensors. 2008; 8(12):7917-7929. https://doi.org/10.3390/s8127917
Chicago/Turabian StyleWang, Wen, and Shitang He. 2008. "A Love Wave Reflective Delay Line with Polymer Guiding Layer for Wireless Sensor Application" Sensors 8, no. 12: 7917-7929. https://doi.org/10.3390/s8127917