Detection of Hidden Hostile/Terrorist Groups in Harsh Territories by Using Animals as Mobile Biological Sensors

Abstract
:1. Introduction
2. Related Works
3. Motivation
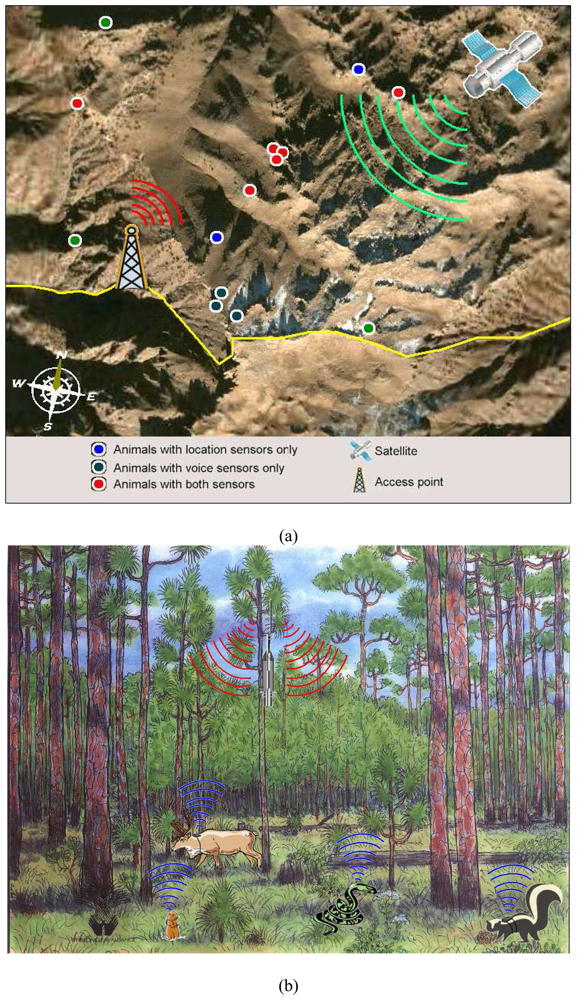
4. Animals as Mobile Biological Sensors for Harsh Terrains
4.1. Proposed System Structure
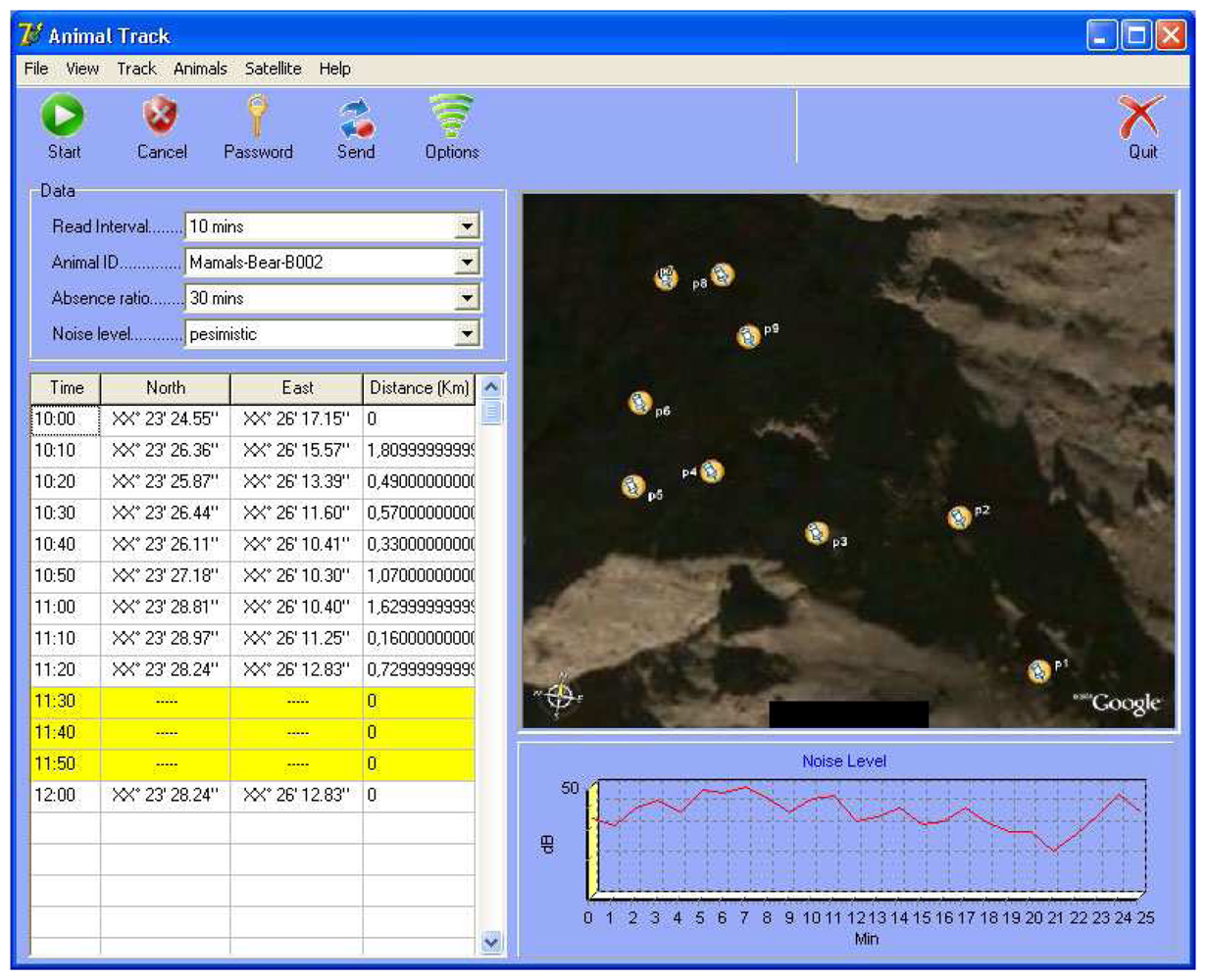
4.1.2. Sample HPD scenario
- Firstly, the reading interval is adjusted according to the number of animals used. This interval shows data flow frequency for each animal. In the sample application, it has been taken as 10 minutes.
- One of the animals with an injected sensor in advance is selected, using Animal ID. In this example, B-002, “bear” has been selected.
- The “Absence Ratio” is determined. This value changes with the animal type. Fast, frequently moving animals should have smaller reading interval and “absence ratio”. In this example, absence ratio for the “bear” is 30 minutes.
- “Noise level” is a variable used to recognize the human voice. If the animal has audio sensors, these are used to decompose between the different volumes of human voice. “Pessimistic” selection in this field is for the detection of very low level human voices in the critical territories. However, it was not used in this example, since signal tracking method was used for location detection.
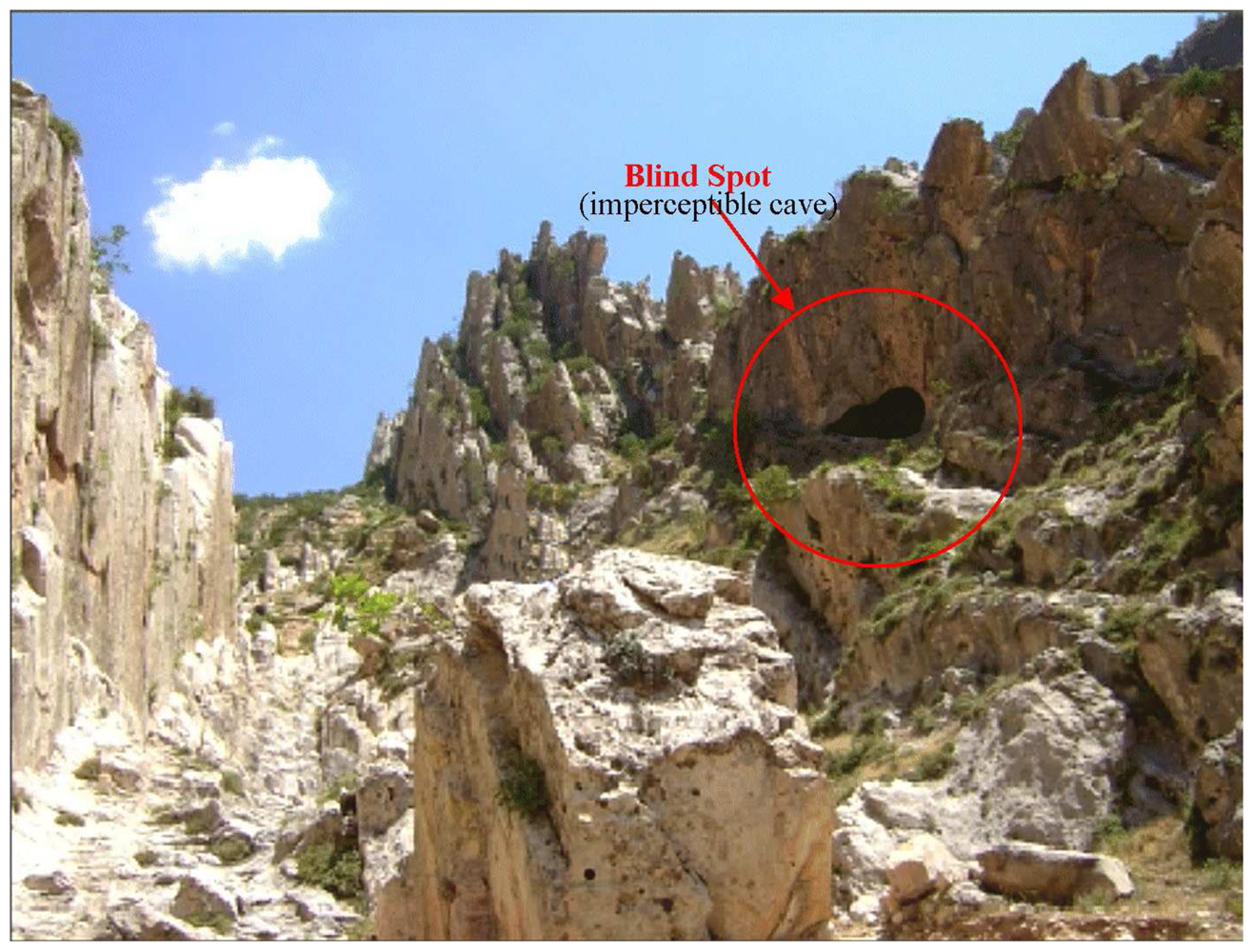
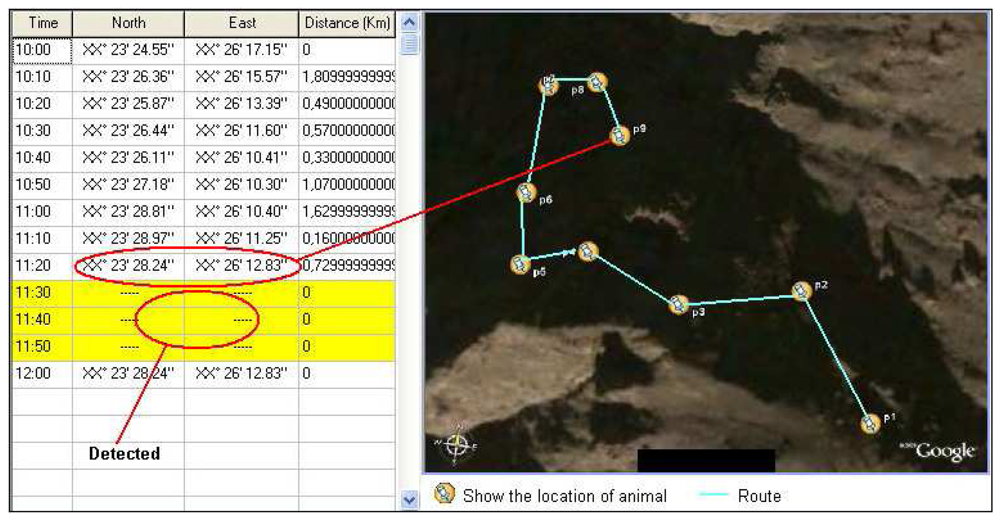
- The location grid in the software shows the tracking periods and coordinates of the selected animal. A different color indicates no signal for a 30 minutes period taken as the absence ratio. If the signal is picked up again, the distance information in the table is checked. A value of between 0 and 10 meters (these ratios can be defined as parameters) clearly demonstrates that the animal stayed in a place from where no signal could be recorded in the period of not less than the absence ratio.
- Security forces determine and check the location of first signal loss (considered as entrance point for hiding place) and where the signals re-establish themselves.
4.1.3. Human voice detection method (HVD)
4.1.4. Sample HVD
- Firstly, the intervals at which reading is taken are determined according to the infrastructure and the number of animals used in the system. This interval shows how often any particular type of animal will provide data. In this example, the interval has been determined as 1 minute.
- Any sensor carrier animal is chosen using Animal ID (previously assigned to the animals). In this example, a vole with the ID V-001 was selected.
- The next stage is determining the absence ratio, which in this example is used for checking (data), as the voice signals. This ratio varies according to the animal used; the absence ratio and reading data interval should be smaller for the fast and shuffling animals. It has been taken as 5 minutes for vole in this example.
- Noise level is a variable which is used in the scanning of human voice. It is used to discriminate the different levels of human voice from sensored animals. “Pessimistic” selection in this field is used for human voices at very low volumes in critical zones, whereas “Optimistic” is a parameter to filter low frequency human voices in probable places. In this example, “pessimistic” has been chosen in order to be used in the critical regions.
- The movement of the animal with the coordinates and time spent is shown in the location grid available in the software. A different color is used if there is no signal for more than 5 minutes in the absence ratio. The distance is checked when the signal is reachable again, and a reading of 0 to one meter is considered to indicate that the animal remained in a location that did not allow a signal for that duration of time (assuming that it is not less than the absence ratio).
- The voice sensors implanted into the animal are filtered to determine whether they contain human voices or not. Any human voice signals are transmitted to the software by the signal towers and shown on a spectrometer. These signals can also be listened to by the software user. If any significant and characteristic human voice is recognized, the position of the animal is determined and checked.
- While this happening, it is possible to identify and confirm the location of the animal disappearance (the point where the signal was lost) and reappearance (the point where the signal resumes), as well as features of the voice being tracked.
4.2. Suitable Animals
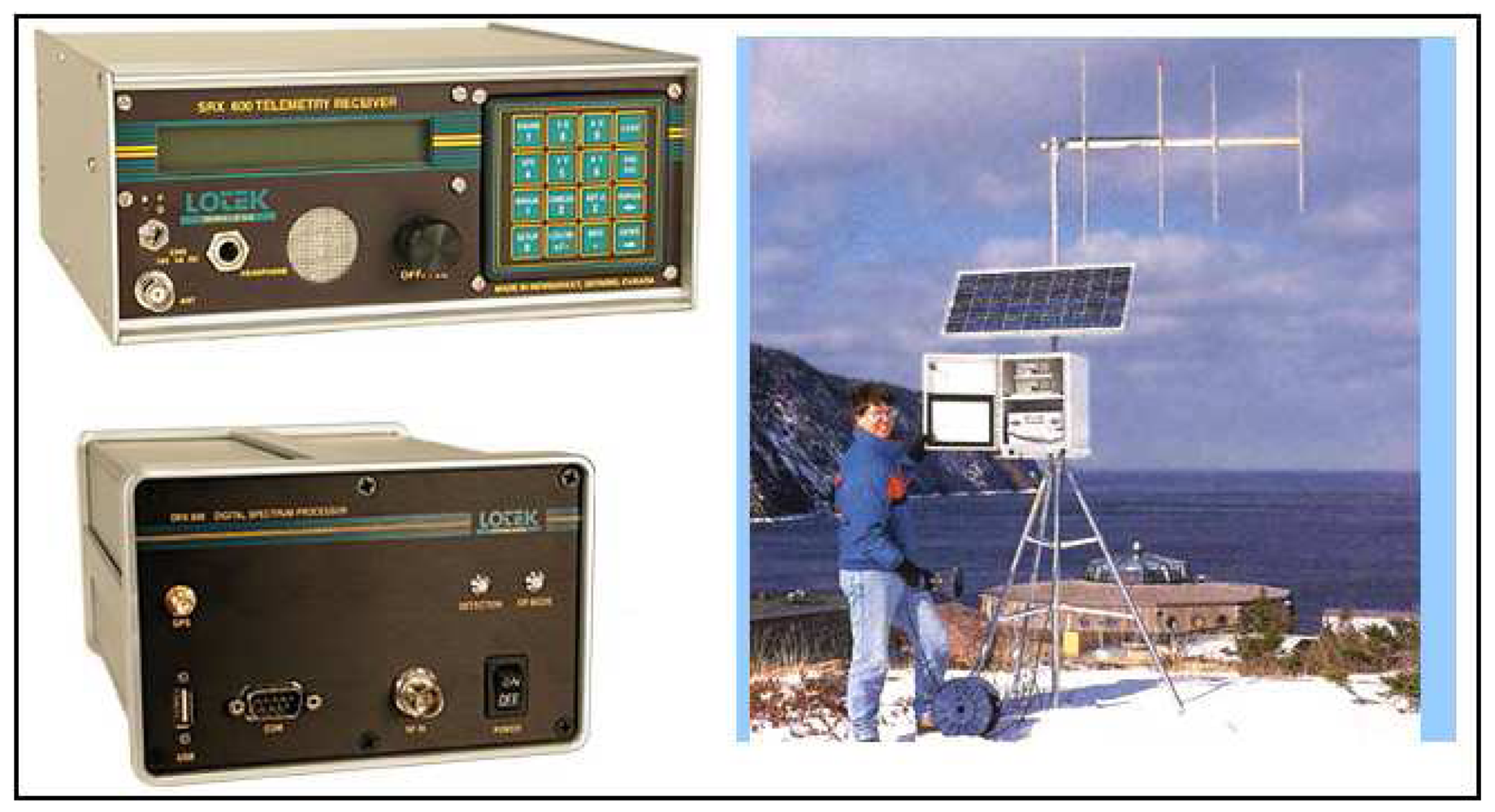
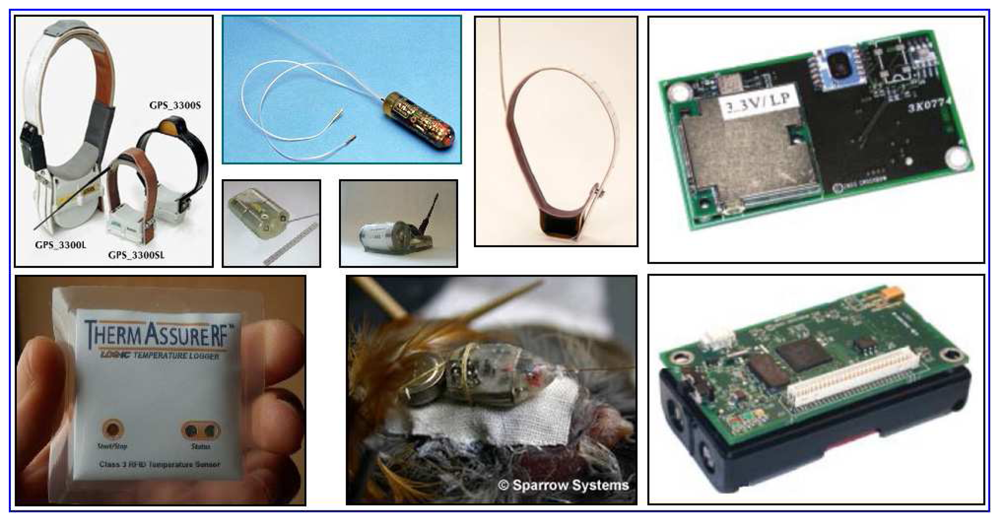
4.3. Suitable Sensors
5. Simulation Results and Discussion
Problems and Disadvantages
- It is a challenge to catch the animals from the environment and implant sensors into them in order to set up the system.
- When specially-trained animals are used for this system, it can create problems related to animal rights.
- There may be an insufficient number of animals particular to the region.
- Since the power of sensors is generally provided by batteries, lack of battery power or physically damaged devices can disrupt the regular data collection.
- The cost of equipment used for the decomposition of human voice signals is considerable (although this may not be a constraint where national security is concerned). The natural reactions of animals equipped with sensors should always be examined before. There is also a necessity of using more than one group of animals to detect multiple human groups.
- As soon as the audio signals have been recorded, it is essential keep a very short data flow interval because it is likely that the target (voice owner) will move.
- The high cost of and difficulty in installing the data collection tower infrastructure especially HVD method.
Advantages
- It is adaptable to the existing location detection systems and it is productive in terms of early detection.
- Using animals as mobile biological sensors is preferable to using fixed sensors because it allows measurement to be taken at any point in a region.
- It allows the possibility of obtaining information using fewer of sensors than the fixed systems.
- It allows the possibility of monitoring areas unreachable by satellites and unmanned aircrafts, using sensor equipped animals moving freely in their habitat.
- The infrastructure of the system can provide alternative applications other than data collection process. It also enables the possibility of obtaining information about various types of animal.
- It is easily adaptable to predesigned animal tracking systems.
- It provides an important support to the prevention of poaching because the sensors allow the immediate detection of death of the animal.
6. Conclusions
- Studies to classify the animal movements would help to build more effective systems in the future.
- Improving sensors would make systems run more effectively.
- Studies using animal psychology to produce animals adapted to the needs of the system would be helpful.
- Integrating wireless networking infrastructure and satellite tracking systems with new and advanced technologies would make the system more effective.
- Embedded early reaction techniques could be employed for future studies, not only for detection but also for an effective reaction process.
References
- Ozhiganov, E.N. Terrorism's profile: nature, goals and motivations. Sotsiologicheskie Issledovaniya 2006, 2, 52–53. [Google Scholar]
- Walzer, M. Response to Jeff McMahan. Journal Philosophia 2006, 34, 19–21. [Google Scholar] [CrossRef]
- Terrorism Research, International Terrorism and Security Research. What is terrorism? http://www.terrorism-research.com/ (accessed Jul, 21 2008).
- U.S. Government Printing Office. House Report 105-851. Report of the select committee on U.S. national security and military/commercial concerns with the people's Republic of China. http://www.gpo.gov/congress/house/hr105851-html (accessed Apr 11, 2008).
- Stephen, E.F. Foreign affairs, november/december 2000. Beyond border control. http://www.foreignaffairs.org/20001101faessay936/stephen-e-flynn/beyond-border-control.html (accessed Jul 21, 2008).
- Finoki, B.; Subtopia. Border control. http://subtopia.blogspot.com/ (accessed Jul 21, 2008).
- Raghavendra, C.S.; Sivalingam, K.M.; Znati, T. Wireless Sensor Networks; Kluwer Academic: New York, 2004. [Google Scholar]
- Znati, T.; Raghavendra, C.; Sivalingam, K.M. Guest editorial. Mobile Networks and Applications 2003, 8(4), 425–426. [Google Scholar] [CrossRef]
- Sahin, Y.G. Animals as mobile biological sensors for forest fire detection. Sensors 2007, 7(12), 3084–3099. [Google Scholar] [CrossRef]
- Pescovitz, D. Boingboing. Marine animals as sensors. http://www.boingboing.net/2006/02/19/marine-animals-as-se.html (accessed Nov 20, 2007).
- Costa, D.; Block, B. Marine animals used as ocean sensors. http://www.we-make-money-not-art.com/archives/008060.php (accessed Oct 20, 2007).
- Fedak, M.; Lovell, P.; McConnell, B.; Hunter, C. Overcoming the constraints of long range radio telemetry from animals: Getting more useful data from smaller packages. Integrative and Comparative Biology 2002, 42(1), 3–10. [Google Scholar] [CrossRef] [PubMed]
- Patrovsky, A.; Biebl, E. M. Microwave sensors for detection of wild animals during pasture mowing. Advances in Radio Science 2005, 3(10), 211–217. [Google Scholar]
- Kahn, L.H. The Bulletin Online. Animals: The world's best (and cheapest) biosensors. http://www.thebulletin.org/columns/laura-kahn/20070314.html (accessed Nov 13, 2007).
- Di Lallo, A.; Farina, A.; Fulcoli, R.; Stile, A.; Timmoneri, L.; Vigilante, D. A real time test bed for 2D and 3D multi-radar tracking and data fusion with application to border control. Radar 2006, CIE '06. International Conference, Rome, IT, Oct 16-19, 2006; pp. 1–6.
- Di Lallo, A.; Farina, A.; Ferrante, R.; Graziano, A.; Ravanelli, M.; Timmoneri, G.; Timmoneri, L.; Volpi, T. An emulator of a border surveillance integrated system. Information Fusion, 9th International Conference, Florence, IT, Jul 10-13, 2006; pp. 1–6.
- MacCarthy, B.; Er, M.; Atthirawong, W. Border Control - Managing international supply networks. IEE Professional Journal on Manufacturing 2003, Special issue on International Manufacturing. 9–13. [Google Scholar]
- Neumann, C.; Weiss, G.; Wahlen, A.; Brehm, T. Ground surveillance with mmW radar for border control and camp protection applications. European Microwave Week, Proceedings of the 37th European Microwave Conference, Munich, DE, Oct 9-12, 2007; pp. 700–703.
- Busch, C.; Nouak, A.; Zhou, X.; Van Der Veen, M.; Deravi, F.; Suchier, J-M. Towards unattended and privacy protected border control. Biometrics Symposium, The Biometrics Consortium Conference, Baltimore Maryland, Sep 11-13, 2007; pp. 1–6.
- Albuquerque, C.; Vickers, B.J.; Suda, T. Network border patrol: Preventing congestion collapse and promoting fairness in the Internet. IEEE-ACM Transactions on Networking 2004, 12(1), 173–186. [Google Scholar] [CrossRef]
- Celik, G.; Sabuncuoglu, I. Simulation modelling and analysis of a border security system. European Journal of Operational Research 2007, 180(3), 1394–1410. [Google Scholar] [CrossRef]
- Younis, M.F.; Ghumman, K.; Eltoweissy, M. Location-aware combinatorial key management scheme for clustered sensor networks. IEEE Transactions on Parallel and Distributed Systems 2006, 17(8), 865–882. [Google Scholar] [CrossRef]
- Kosmerlj, M.; Fladsrud, T.; Hjelmas, E.; Snekkenes, E. Face recognition issues in a border control environment. Lecture Notes in Computer Science 2006, 3832, 33–39. [Google Scholar]
- Morris-Suzuki, T. Invisible immigrants: Undocumented migration and border controls in early postwar Japan. Journal of Japanese Studies 2006, 32(1), 119–153. [Google Scholar] [CrossRef]
- Kwon, T.; Moon, H. Multi-modal biometrics with PKI technologies for border control applications. Lecture Notes in Computer Science 2005, 3495, 99–114. [Google Scholar]
- Cross, E.R.; Newcomb, W.W.; Turker, C.J. Use of weather data and remote sensing to predict the geographic and seasonal distribution of phlebotomus paptasi in southwest Asia. The American Society of Tropical Medicine and Hygiene 1996, 54(5), 530–536. [Google Scholar]
- Leyequien, E.; Verrelst, J.; Slot, M.; Schaepman-Strub, G.; Heitkönig, I.M.A.; Skidmore, A. Capturing the fugitive: Applying remote sensing to terrestrial animal distribution and diversity. International Journal of Applied Earth Observation and Geoinformation 2007, 9, 1–20. [Google Scholar]
- Bosworth, M. Border control and the limits of the sovereign state. Social & Legal Studies 2008, 17(2), 199–215. [Google Scholar] [CrossRef]
- Baldaccini, A. Counter-terrorism and the EU strategy for border security: Framing suspects with biometric documents and databases. European Journal of Migration and Law 2008, 10(1), 31–49. [Google Scholar] [CrossRef]
- Niechziol, V.F.; Schmucker, M. Police combat of the cross-border criminality after discontinuation of the cross-border control. Kriminalistik 2008, 62(2), 105–111. [Google Scholar]
- Spijkerboer, T. The human costs of border control. European Journal of Migration and Law 2007, 9(1), 127–139. [Google Scholar] [CrossRef]
- Staelin, D.H.; Kerekes, J.P. Remote Sensing Capabilities, chapter in Heaven and Earth: Civillian Uses of Space; Dallymeyer, D.G., Tsipis, K., Eds.; Kluwer Law International: Cambridge, 1996; p. 163. [Google Scholar]
- Gorove, S. Developments in Space Law, Issues and Policies; Martinus Nijhoff Publishers: London, 1991; pp. 294–295. [Google Scholar]
- Israeli Weapons, Aircraft-UAVs. http://www.israeli-weapons.com/israeli_weapons_aircraft_uavs.htm (accessed Apr 11, 2008).
- Ochmanek, D. Military Operations Against Terrorist Groups Abroad Implications for the U.S. Air Force; Rand: Santa Monica, 2003; pp. 22–24. [Google Scholar]
- Chong, C.-Y.; Kumar, S.P. Sensor networks: Evolution, opportunities, and challenges. Proceedings of the IEEE 2003, 91(8), 1247–1256. [Google Scholar] [CrossRef]
- Clouqueur, T.; Phipatanasuphorn, V.; Ramanathan, P.; Saluja, K.K. Sensor deployment strategy for target detection. Sensor Networks and Applications, Proceedings of the 1st Workshop WSNA'02, Atlanta, GA, Sep 28, 2002; pp. 42–48.
- Akkaya, K.; Younis, M. A Survey on routing protocols for wireless sensor networks. Ad Hoc Networks 2005, 3(3), 325–349. [Google Scholar] [CrossRef]
- Mainwaring, A.; Culler, D.; Polastre, J.; Szewczyk, R.; Anderson, J. Wireless sensor networks for habitat monitoring. International Workshop on Wireless Sensor Networks and Applications, Proceedings of the 1st ACM International Workshop on Wireless Sensor Networks and Applications, Atlanta, Georgia, USA, Sep 2002; pp. 88–97.
- Anselmo, J.C. Commercial satellites zoom in on military imagery monopoly. Aviation Week & Space Technology 1997, 147(12), 75–78. [Google Scholar]
- Masuda, Y. Mechanism of behavioral adaptation: analyses by a simple model. Medical Hypotheses 1999, 52(2), 115–117. [Google Scholar] [CrossRef] [PubMed]
- Harmon, L.J.; Bauman, K.; McCloud, M.; Parks, J.; Howell, S.; Losos, JB. What free-ranging animals do at the zoo: A study of the behavior and habitat use of opossums (Didelphis virginiana) on the grounds of the St. Louis Zoo. Zoo Biology 2005, 24(3), 197–213. [Google Scholar] [CrossRef]
- Cochran, J. Sparrow Systems. Automated radio telemetry system initiative. http://www.princeton.edu/∼wikelski/research/physiology.htm (accessed Oct 20, 2007).
- Fornaro, R.; Coblentz, D.; Hawkins, D.; Lewis, J.; Noffsinger, B. Computer society international design competition 2005 final report. NEAT-Networks for endangered animal tracking. http://www.computer.org/portal/cms_docs_ieeecs/ieeecs/education/csidc/csidc2005/northcarolinasu.pdf (accessed Jul 22, 2008).
- Evidencia, ThermAssureRF. http://www.evidencia.biz/products/prototemp_pr.htm/ThermAssureRF.htm (accessed Oct 20, 2007).
- Lotek Corparation, Sensors. http://www.lotek.com (accessed Nov 13, 2007).
- Caribbean Conservation Corporation & Sea Turtle Survival League, How tracking sea turtles by satellite works. http://www.cccturtle.org/satellitetracking.php?page=satintro (accessed Nov 13, 2007).
- Google Earth. http://earth.google.com (accessed May 20, 2008).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


© 2008 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Sahin, Y.G.; Ercan, T. Detection of Hidden Hostile/Terrorist Groups in Harsh Territories by Using Animals as Mobile Biological Sensors. Sensors 2008, 8, 4365-4383. https://doi.org/10.3390/s8074365
Sahin YG, Ercan T. Detection of Hidden Hostile/Terrorist Groups in Harsh Territories by Using Animals as Mobile Biological Sensors. Sensors. 2008; 8(7):4365-4383. https://doi.org/10.3390/s8074365
Chicago/Turabian StyleSahin, Yasar Guneri, and Tuncay Ercan. 2008. "Detection of Hidden Hostile/Terrorist Groups in Harsh Territories by Using Animals as Mobile Biological Sensors" Sensors 8, no. 7: 4365-4383. https://doi.org/10.3390/s8074365