4.3.1. Analog Electronics
Several measures are taken in the ‘front end’ to minimize both noise and systematic error associated with the differential pressure cells per se. Each pressure sensor is soldered to a small circuit board containing all the electronics necessary to drive it and amplify the output. This has several advantages. First, noise is reduced by amplifying the millivolt output of the sensor close to the source. Second, the electronics can be tailored to the individual sensors; by selecting appropriate values for one resistor on the board the span of the sensors can all be made to be within 1 to 2 percent of one another. Otherwise, the gain from one sensor to the next can vary by as much as a factor of two. Third, each driving and amplifying circuit is uniquely tied to one sensor, so when the sensor is calibrated, the calibration will take into account variance among the electronic circuits.
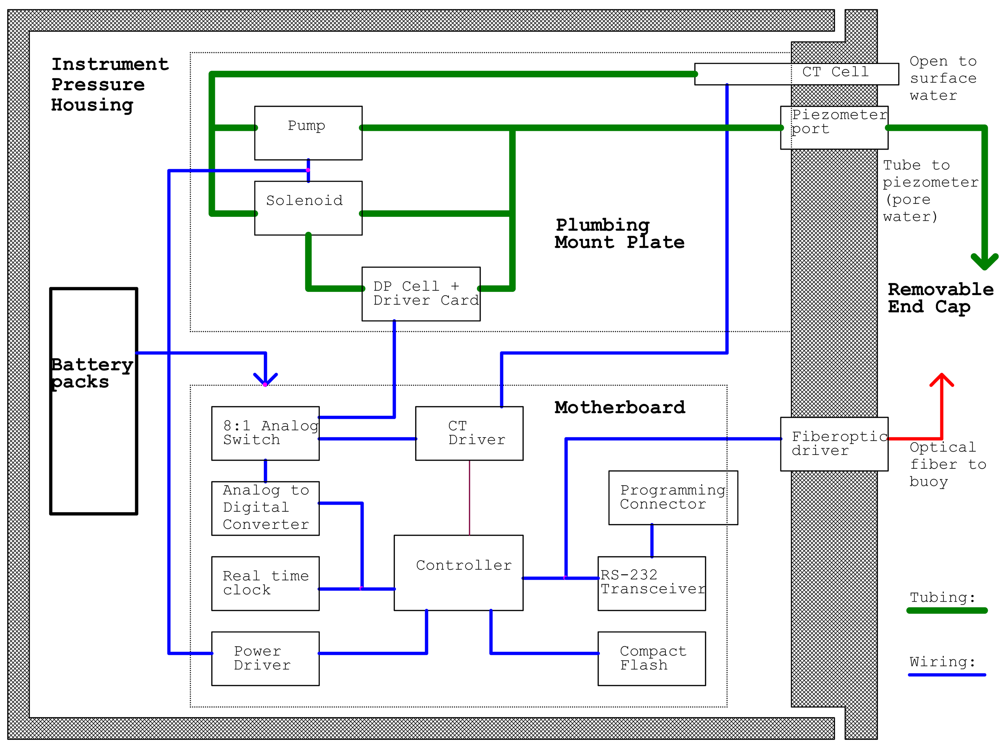
To drive the conductivity cell, a resistive divider generates a 50 mV signal that is buffered by operational-amplifiers. Analog switches transform this signal into a square wave. The square wave is fed onto the conductivity electrodes and the resulting current is proportional to the conductivity of the seawater in the tube. Driving the cell with an AC signal eliminates errors caused by build up of ions around the electrodes associated with DC measurements, as well as reducing electrolytic corrosion. The analog switch is configured so that it can accept either a two or four electrode conductivity cell. Using a four electrode cell would bring some benefits; in the four electrode configuration, two electrodes are used to drive the current through the water, but the voltage is sensed between the other two electrodes. Essentially no current flows through these sense electrodes, eliminating the effect of resistance imbalances from the analog switches, circuit wiring, fouling of the electrodes, etc. The thermistor is used as one half of a voltage divider to create a temperature signal. Careful selection of the other resistor ensures a nearly linear relationship between temperature and output voltage.
Signals from the differential pressure cells and conductivity-temperature cells are digitized using a Linear Technologies LTC2400 analog to digital converter. This is a micropower 24-bit Delta-Sigma converter that consumes only 200 μA during conversion, and much less than that in sleep mode. Communications are handled over the same I2C bus used for the real-time clock. An 8-input multiplexer is used to switch the various signals to the A-to-D one at a time. In addition to the differential pressure, temperature, and conductivity measurements, the die temperature of the differential pressure sensor is measured, the three battery voltages are measured, and a leak detect circuit provides early warning of water intrusion in the pressure housing via the wireless ink. The leak detector comprises two wires held at different electrical potentials and physically located close to but not touching the bottom of the housing. If water bridges these two wires, current will flow, generating a signal across a 1 megohm series resistor. The sensitivity is sufficient that even fresh water will create a noticeable signal.
Throughout the system certain measures are taken to ensure that the design goals are met. The reference voltage is generated by a resistive divider from the regulated analog rail, and is buffered by an op-amp. All measurements are made ratiometrically so the actual value of this reference is not critical. Low power precision op-amps are used throughout to keep power consumption low. The average power consumption of the analog electronics is less than 15 mW, and is dominated by the differential pressure sensor itself. While this sensor could be switched off when not in use to further reduce power consumption, this is unnecessary, so we leave it on continuously to eliminate any possible errors caused by thermal effects of power switching.
4.3.2. Digital Electronics
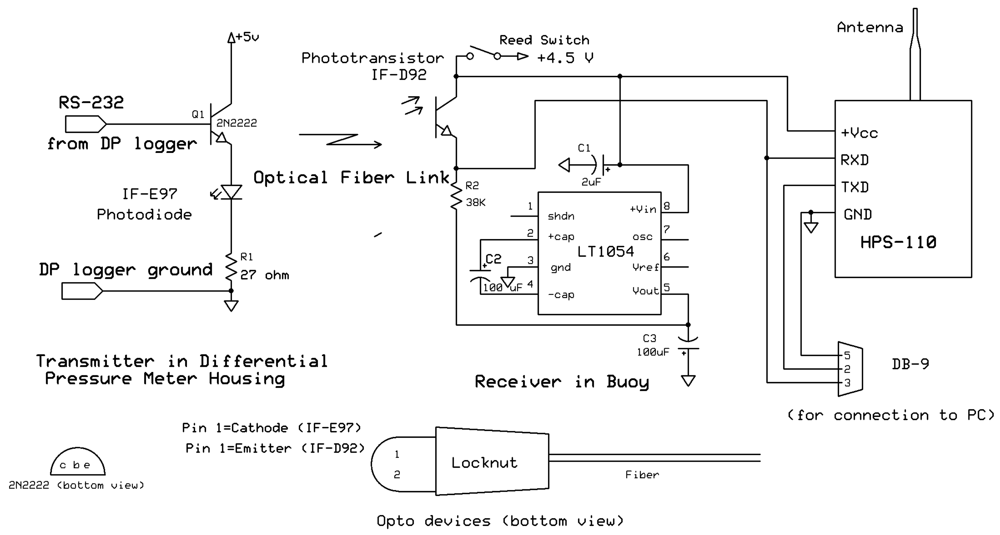
Control and data logging are accomplished digitally using a PIC18LF877 processor, manufactured by Microchip Technology Inc, chosen for its versatility, ease of programming, low power and low cost. It is run with a 614 kHz clock, generated by a Linear Technologies LTC6906 programmable silicon oscillator. The power consumption of the processor and oscillator at this clock speed is less than 200 μA. The processor's on-board universal asynchronous transmitter/receiver (UART) is used in conjunction with a Maxim MAX3223 RS-232 transceiver to enable communication between the instrument and the operator. An adaptor cable connects the board to a standard serial port, through which the operating parameters can be programmed, the clock can be set, and data can be observed in real time for testing or calibration. The RS-232 driver increases the power consumption of the board by an order of magnitude, so it is kept switched off except when an active RS-232 link is detected. The 3V logic-level signal from the UART is also taken off board to the fiber-optic link to the wireless buoy.
A Maxim MAX3231 real-time clock (RTC) is used to provide timing for the acquisition system. This is a single-chip highly integrated package, containing a silicon oscillator, a temperature sensor, an array of switchable capacitors for temperature compensation, and the logic circuitry of the RTC. Over the temperature range in the field (0–40°C) the clock keeps time to within ± 2ppm, or about 1 minute per year. The devices can be recalibrated as necessary with a frequency counter. We package the surface mount part on interchangeable postage-stamp-sized boards to allow the clocks to be calibrated independently and swapped out if necessary. The board also holds a lithium coin-cell battery to backup the time and settings on the clock. Communication with the PIC is handled via the I2C protocol. The real-time clock generates different alarms to control the sampling. It can be programmed with a start time and date to allow the operator time to seal up the instrument, transport it to the field and install it. When the alarm goes off, the PIC switches to normal run mode and takes its first reading. In normal run mode, the RTC generates an alarm every minute, on the minute. The PIC checks the time, and if it is the appropriate time it will take a sample, generating a timestamp from the RTC time. The RTC can also be configured to generate an alarm once every second, for more frequent sampling during laboratory calibrations.
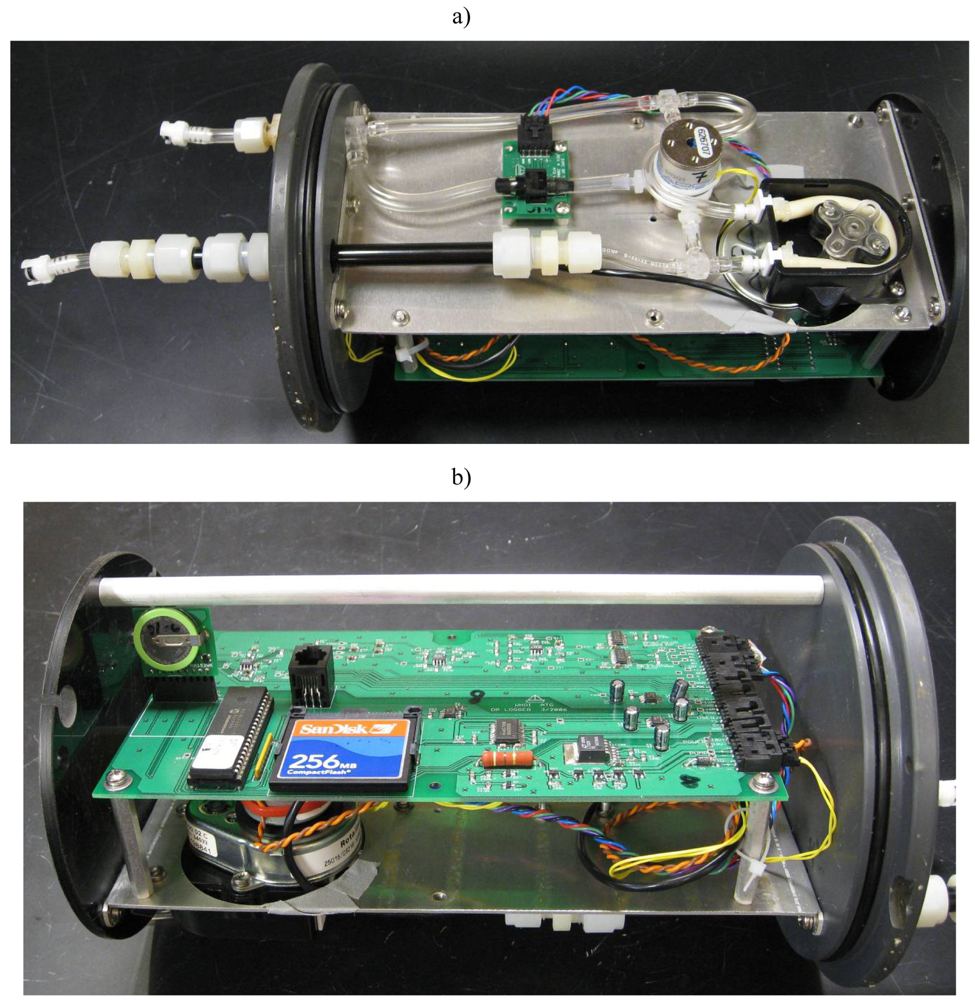
A standard Compact Flash card is used for data storage. These cards have many advantages – the cards and readers are readily available, very inexpensive, and even the smallest cards available today have enough capacity for years of data in this application. The PIC formats the cards with a basic FAT16 file system, which all major operating systems can recognize. It creates a boot directory, a file allocation table, and a root directory containing two file entries. One file allows the user to enter a short text information file containing information about the deployment. Data is collected into the second file as plain ASCII, in a space separated values list, one sample per line. Downloading and analysis of the data is thus very straightforward; a text editor can be used to quickly inspect the data, and the data can be imported directly into applications such as Excel or Matlab for further processing.
Using the serial interface, all of the components of the instrument can be controlled manually to facilitate testing and calibration. Additionally, various parameters can be set to change the behavior during deployments. These parameters include the interval between samples (1-60 minutes), the interval between running the pump to check conductivity and salinity (1-24 hours, or not at all), and the duration of pumping (1 minute up to the sample interval). The parameters will allow the instrument to function in a wide range of environments with minimal modifications. Two more run modes are available for short term testing where power consumption is not a concern: “fast mode”, and “calibration mode”. Fast mode is similar to the standard run mode, in that the solenoid valve is actuated at intervals, and the pump is run at longer intervals, but the instruments are recording loosely timed data continuously. This provides information on the dynamics of a location, for instance how much effect wave motion has on the pressure sensor and how long the pump must be run to draw groundwater into the conductivity cell. Calibration mode, on the other hand, is designed for use in the lab to calibrate sensors. It takes temperature, conductivity, and pressure readings at precisely timed intervals (1-60 seconds), but does not run the pump or solenoid.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}