A Radio-Aware Routing Algorithm for Reliable Directed Diffusion in Lossy Wireless Sensor Networks

Abstract
:
1. Introduction
2. Related Works and Motivation
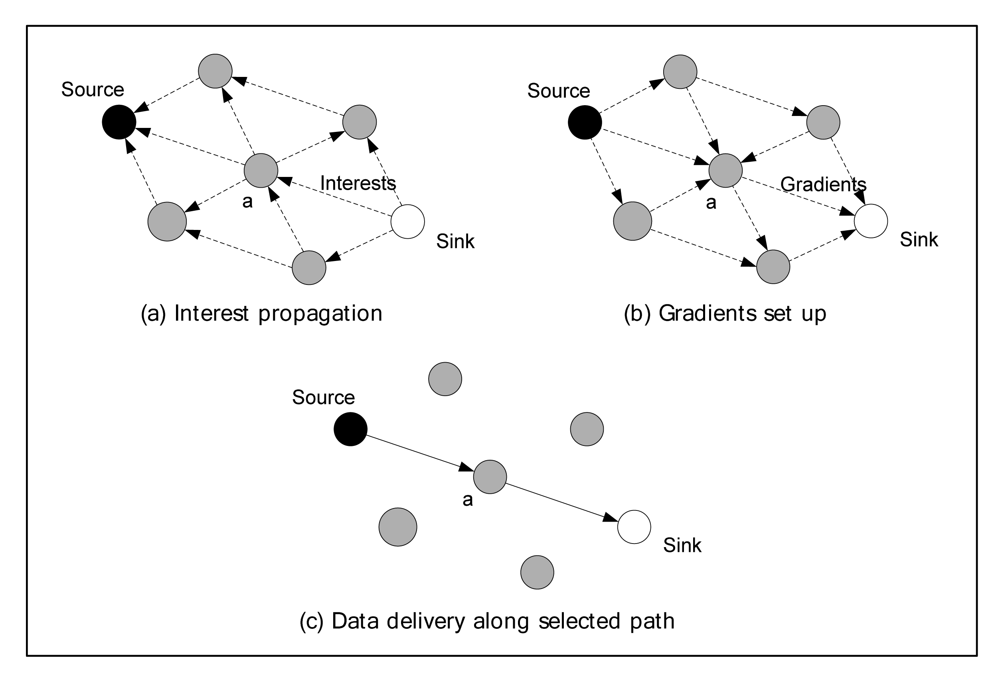
2.1. The Overview of Directed Diffusion
2.2. The Motivation
3. Proposed Routing Algorithm
3.1. Consideration of 802.11 MAC for Sensor Network
3.2. Operation of the Radio-Aware Routing Algorithm
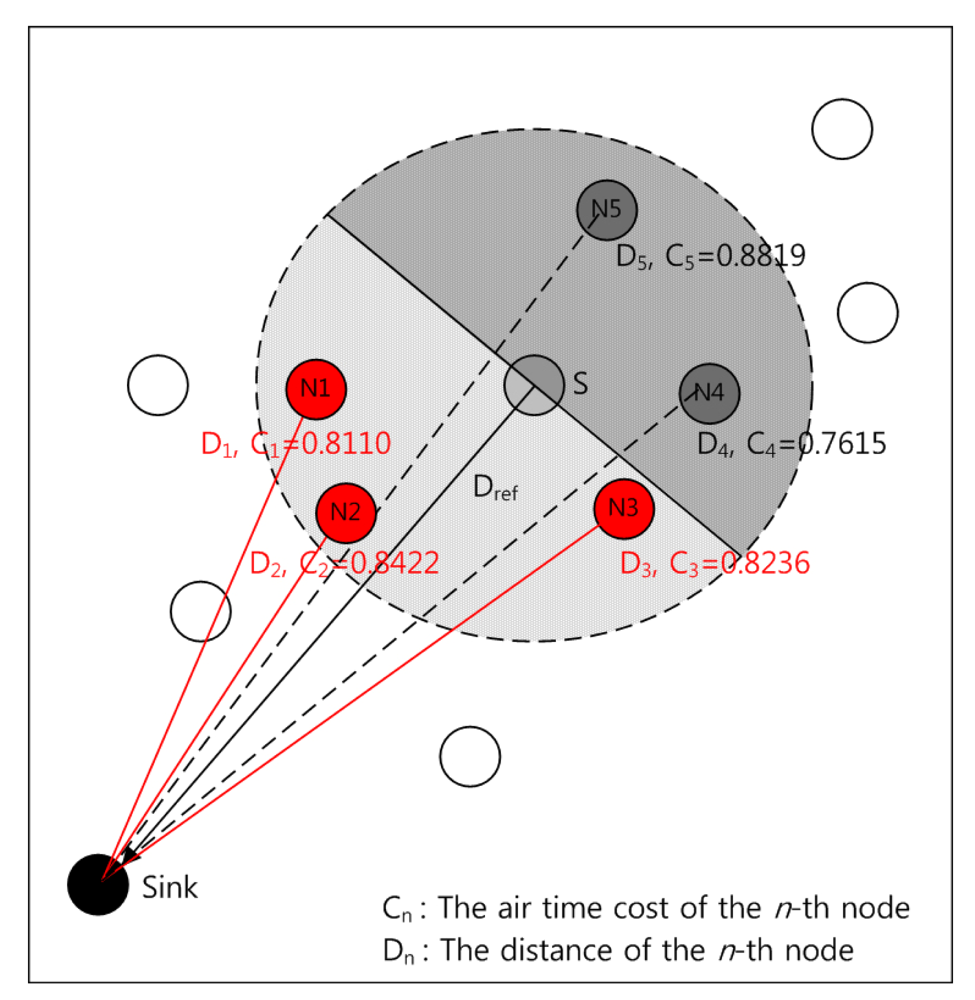
3.2.1. The air time cost
| Var. | Description |
| O | Overhead (699 μs) |
| Bt | Number of bits in test frame (8,192 bits) |
| r | Bit rate in Mbps |
| ef | Frame error rate |
3.2.2. The neighbor table
3.2.3. The node selection algorithm
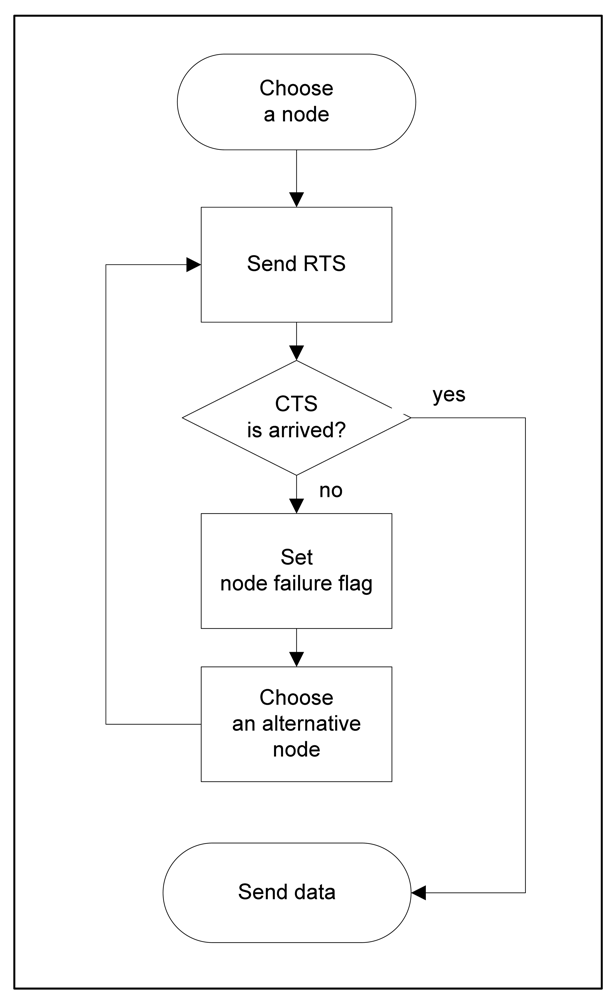
3.2.4. The fast re-route scheme
3.2.5. Link asymmetry of wireless network
4. Performance Analysis
4.1. Definition of the Error Model
4.2. Simulation Environment
4.3. The Performance Metrics
5. Performance Analysis
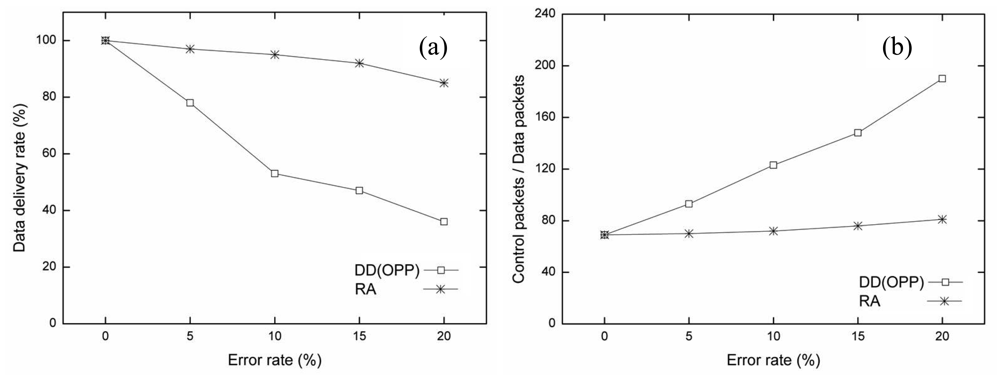
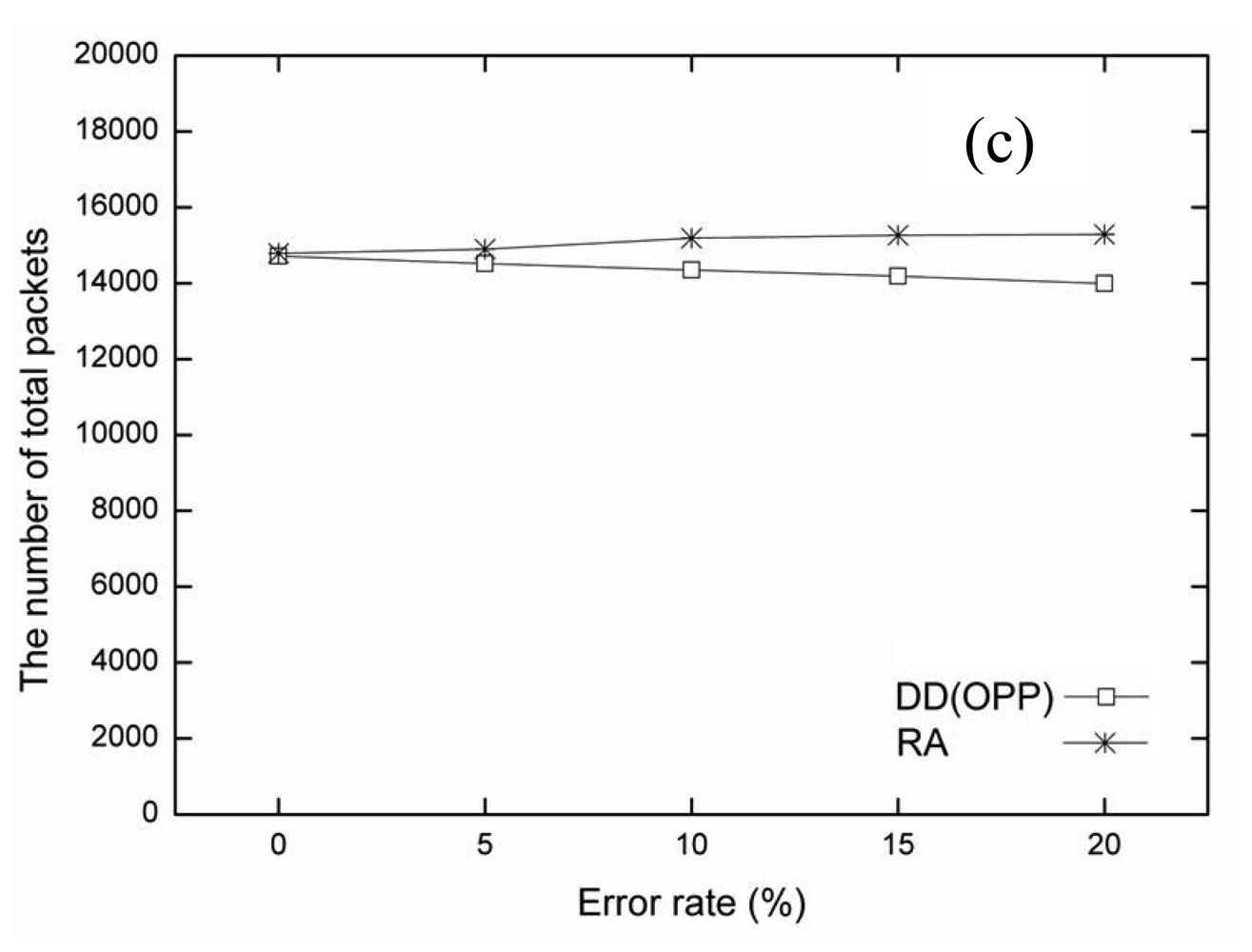
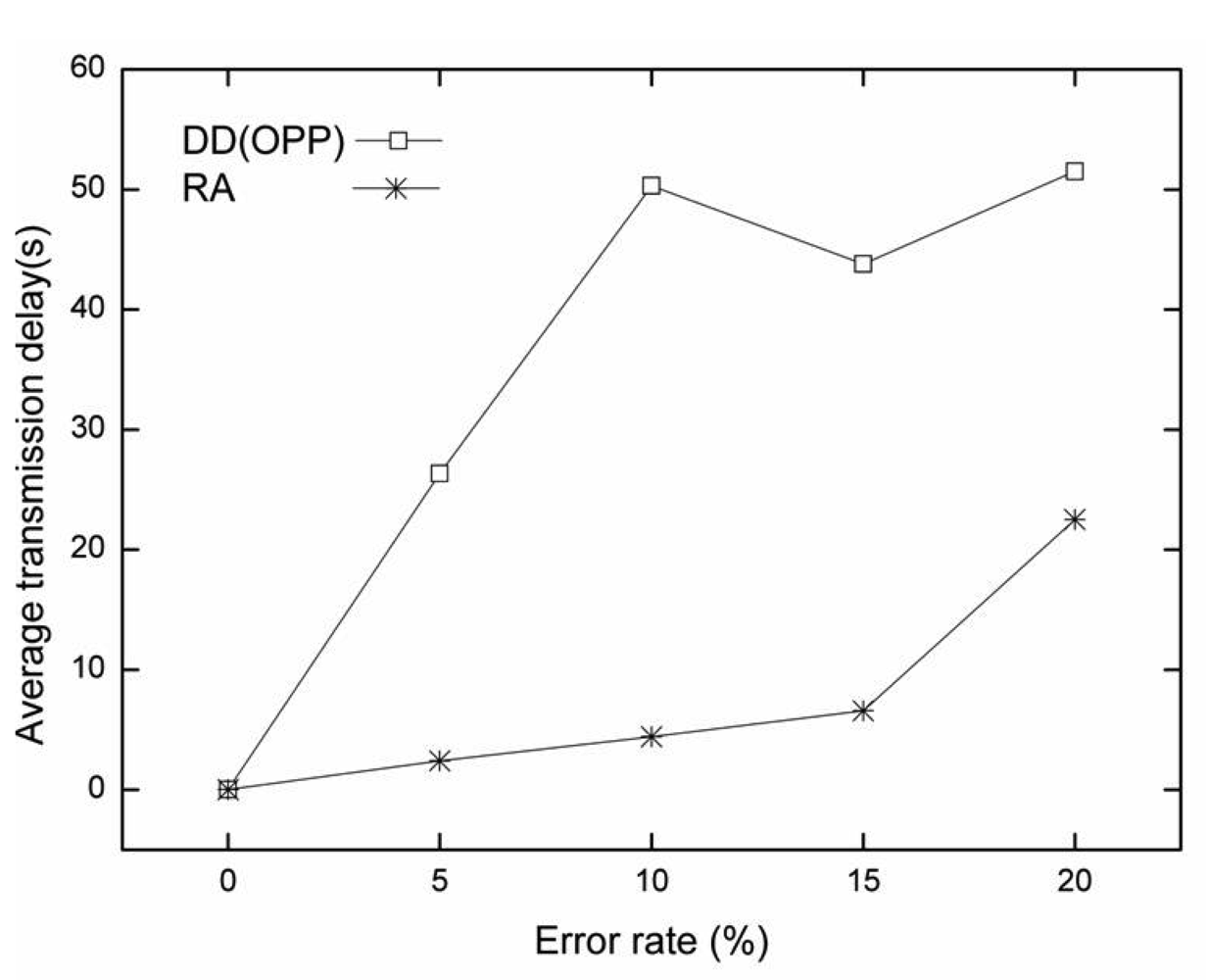
5.1. Grid Topology
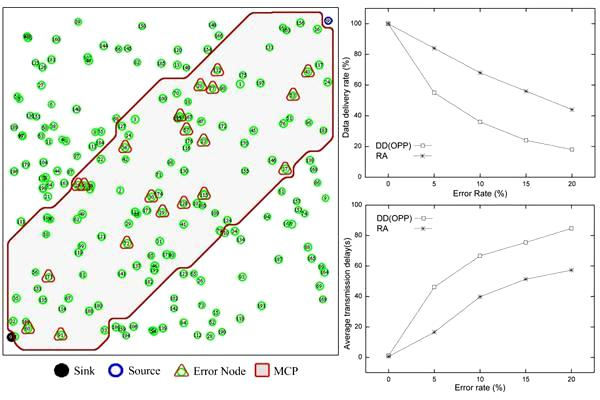
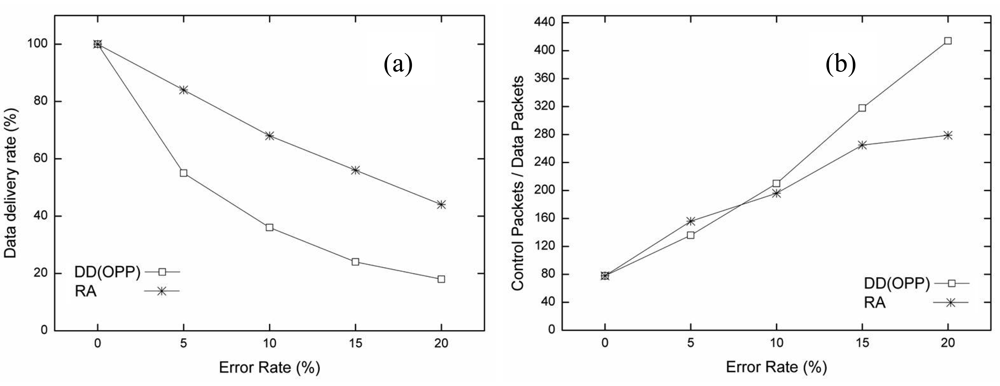
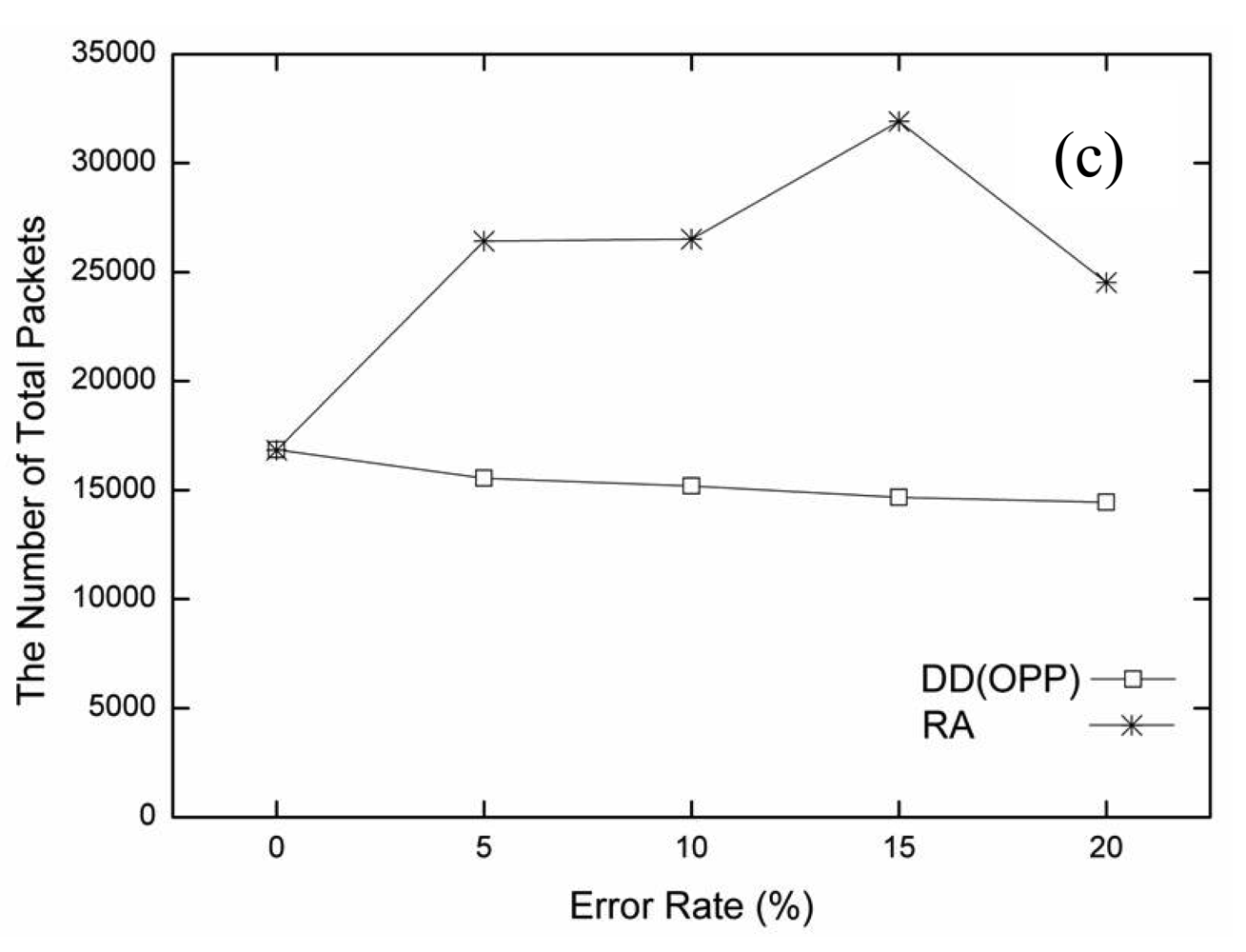
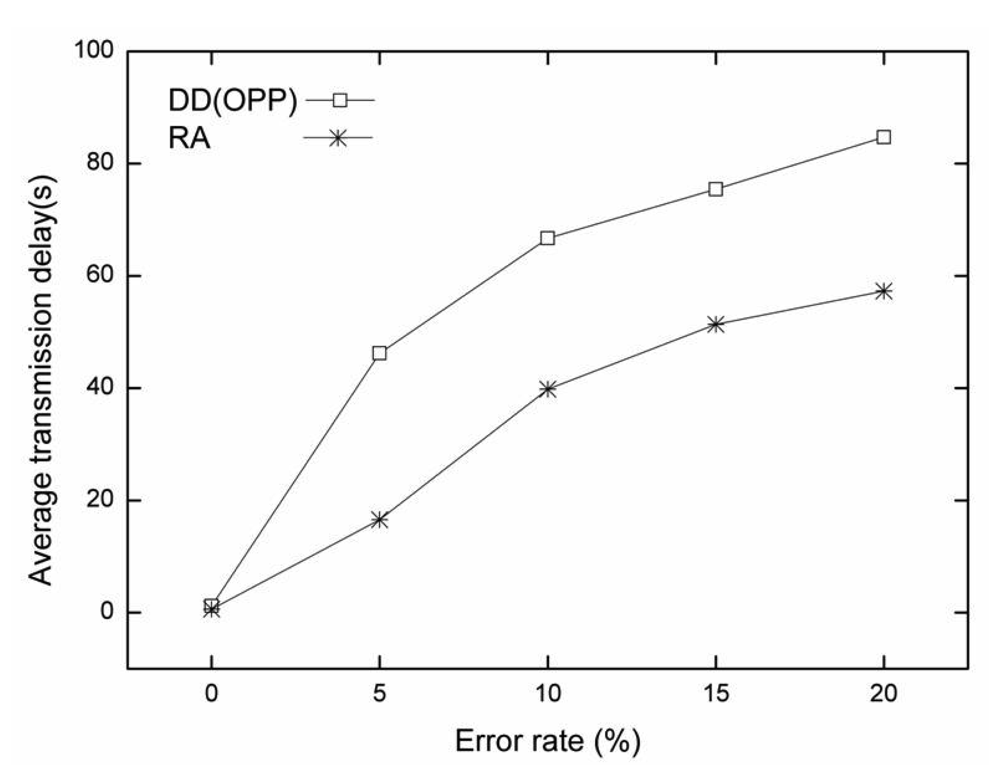
5.2. Random Topology
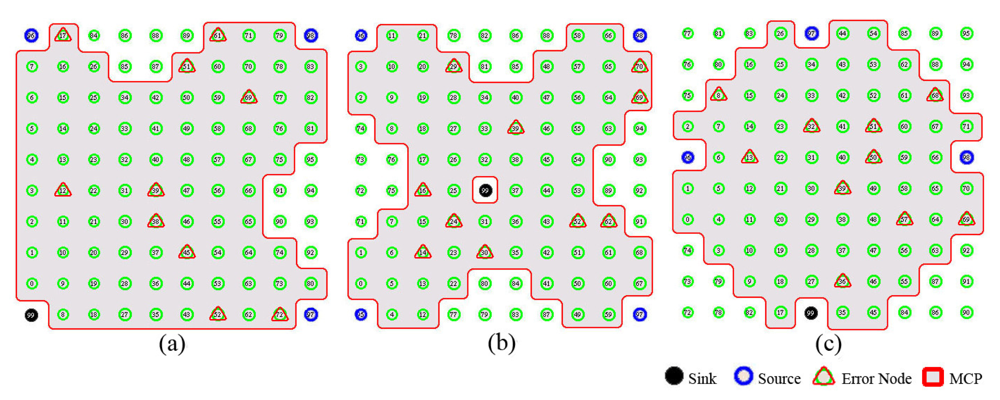
5.3. Multiple Sources with Different Sink Position
6. Conclusions
Acknowledgments
References and Notes
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. A survey on sensor networks. IEEE Comm. Mag. 2002, 40, 102–114. [Google Scholar]
- Chong, C.Y.; Kumar, S.P. Sensor networks: Evolution, opportunities, and challenges. IEEE Proc. 2003, 91, 1247–1256. [Google Scholar]
- Tilak, S.; Abu-Ghazaleh, N.B.; Heinzelman, W. A taxonomy of wireless micro-sensor network models. ACM SIGMOBILE Mobile Comp. Comm. Rev. 2002, 6, 28–36. [Google Scholar]
- AL-Karaki, J.N.; Kamal, A.E. Routing Techniques in wireless sensor networks: A survey. IEEE Wirel. Comm. 2004, 11, 6–28. [Google Scholar]
- Akkaya, K.; Younis, M. A survey on routing protocols for wireless sensor networks. Elsevier Ad Hoc Netw. J. 2005, 3, 325–349. [Google Scholar]
- Yao, Y.; Gehrke, J. The cougar approach to in-network query processing in sensor networks. ACM SIGMOD Record 2002, 31, 9–18. [Google Scholar]
- Sadagopan, N.; Krishnamachari, B.; Helmy, A. The ACQUIRE mechanism for efficient querying in sensor networks. Proceedings of the First International Workshop on Sensor Network Protocol and Applications, Anchorage, AK, USA; 2003; pp. 149–155. [Google Scholar]
- Heinzelman, W.; Chandrakasan, A.; Balakrishnan, H. Energy-efficient communication protocol for wireless sensor networks. Proceedings of the 33rd Hawaii International Conference System Sciences, Maui, Hawaii, USA; 2000; Volume 2, pp. 3005–3014. [Google Scholar]
- Lindsey, S.; Raghavendra, C.S. PEGASIS: power efficient gathering in sensor information systems. Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA; 2002; Volume 3, pp. 1125–1130. [Google Scholar]
- Manjeshwar, A.; Agrawal, D.P. TEEN: a protocol for enhanced efficiency in wireless sensor networks. Proceedings of the 1st International Workshop on Parallel and Distributed Computing Issues in Wireless Networks and Mobile Computing, San Francisco, CA, USA; 2001; pp. 2009–2015. [Google Scholar]
- Heinzelman, W.B.; Kulik, J.; Balakrishnan, H. Adaptive protocols for information dissemination in wireless sensor networks. Proceedings of the 5th Annual ACM/ IEEE International Conference on Mobile Computing and Networking (MobiCom'99), Seattle, WA, USA; 1999; pp. 174–185. [Google Scholar]
- Intanagonwiwat, C.; Govindan, R.; Estrin, D.; Heidemann, J.; Silva, F. Directed diffusion for wireless sensor networking. IEEE/ACM Trans. Netw. 2003, 11, 2–16. [Google Scholar]
- Woo, A.; Tong, T.; Culler, D. Taming the underlying issues for reliable multihop routing in sensor networks. Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA; 2003; pp. 14–27. [Google Scholar]
- Seada, K.; Zuniga, M.; Helmy, A.; Krishnamachari, B. Energy-efficient forwarding strategies for geographic routing in lossy wireless sensor networks. Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems, Baltimore MD, USA; 2004; pp. 108–121. [Google Scholar]
- Servetto, S.D.; Barrenechea, G. Constrained random walks on random graphs: routing algorithms for large scale wireless sensor networks. Proceedings of the 1st ACM International Workshop on Wireless Sensor Network and Applications (WSNA'02), Atlanta, GA, USA; 2002; pp. 12–21. [Google Scholar]
- Cruz, R.L.; Santhanam, A.V. Optimal routing, link scheduling and power control in multi-hop wireless networks. Proceedings of the IEEE INFOCOM 2003, San Francisco, CA, USA; 2003; pp. 702–711. [Google Scholar]
- Sankar, A.; Liu, Z. Maximum lifetime routing in wireless ad-hoc networks. Proceedings of the IEEE INFOCOM 2004, Hong Kong, China; 2004; Volume 2, pp. 1089–1097. [Google Scholar]
- Madan, R.; Lall, S. Distributed algorithms for maximum lifetime routing in wireless sensor networks. Proceedings of the IEEE Global Telecommunications Conference 2004 (GLOBE COM ‘04), Dallas, TX, USA; 2004; Volume 2, pp. 748–753. [Google Scholar]
- Handziski, V.; Kopke, A.; Karl, H.; Frank, C.; Drytkiewicz, W. Improving the energy efficiency of directed diffusion using passive clustering. Proceedings of the first European workshop on wireless sensor networks, EWSN 2004, Berlin, Germany; 2004. LNCS 2920. pp. 1–17. [Google Scholar]
- Yuanrong, C.; Jiaheng, C. An improved directed diffusion for wireless sensor networks. Proceedings of Wireless Communications, Networking and Mobile Computing (WICOM) 2007, Shanghai, China; 2007; pp. 2380–2383. [Google Scholar]
- Zhiyu, L.; Haoshan, S. Design of gradient and node remaining energy constrained directed diffusion routing for WSN. Proceedings of Wireless Communications, Networking and Mobile Computing (WICOM) 2007, Shanghai, China; 2007; pp. 2600–2603. [Google Scholar]
- Chen, M.; Kwon, T.; Choi, Y. Energy-efficient differentiated Directed Diffusion (EDDD) in wireless sensor networks. Comput. Comm. 2005, 29, 231–245. [Google Scholar]
- Silva, F.; Heidemann, J.; Govindan, R.; Estrin, D. Directed Diffusion USC/ISI Technical Report ISI-TR-2004-586. 2004, 1–25.
- Foukalas, F.; Gazis, V.; Alonistioti, N. Cross-layer design proposals for wireless mobile networks: a survey and taxonomy. IEEE Comm. Mag. 2008, 10, 70–85. [Google Scholar]
- Adams, L. Capitalizing on 802.11 for sensor network. The White Paper; GainSpan Corporation: Los Gatos, CA, USA, 2007. Available at: http://www.gainspan.com/docs2/GS_80211_networks-WP.pdf (accessed September 22, 2009).
- Athanasiou, G.; Korakis, T.; Ercetin, O.; Tassiulas, L. Dynamic cross-layer association in 802.11-based mesh networks. Proceedings of the 26th IEEE International Conference on Computer Communications (INFOCOM 2007), Anchorage, AK, USA; 2007; pp. 2090–2098. [Google Scholar]
- Srivastava, V.; Motani, M. Cross-layer design: A survey and the road ahead. IEEE Comm. Mag. 2005, 43, 112–119. [Google Scholar]
- Kurose, J.F.; Ross, K.W. A top-down approach featuring the internet. In The Computer Networking., 3rd ed.; Mahtani, P., Sullivan, S.H., Paquin, E., Eds.; Addison Wesley: New York, NY, USA, 2005; pp. 517–522. [Google Scholar]
- Zhou, K.; Krishnamurthy, S.; Stankovic, J.A. Impact of radio irregularity on wireless sensor networks. Proceedings of MobiSys '04. 2004, 125–138. [Google Scholar]
- Network Simulator, ns-2. Available at: http://www.isi.edu/nsnam/ns/ (accessed September 22, 2009).
- Tilak, S.; Abu-Ghazaleh, N.B.; Heinzelman, W. A taxonomy of wireless micro-sensor network models. ACM SIGMOBILE Mobile Comput. Comm. Rev. 2002, 6, 28–36. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node id | Position x | Position y | Air time cost | Route failure flag |
| 22 | 50 | 50 | 0.08819 | 1 |
| 23 | 50 | 70 | 0.09115 | 0 |
| 24 | 50 | 90 | 0.09115 | 0 |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| 32 | 70 | 50 | 0.07311 | 1 |
| 44 | 90 | 90 | ∞ | 0 |
| Network size | 200 m × 200 m |
| Topology | Grid, Random |
| The number of sink | 1 |
| The number of source | 1, 3, 4 |
| Number of nodes | 100 (Grid), 200 (Random) |
| Transmission range | 30 m |
| Initial node energy | 30 J |
| Location of sink node | (10, 10) |
| Location of source node | (190, 190) |
| Error rate | 5%, 10%, 15%, 20% |
| Simulation time | 1,000 s |
| Interest duration | 60 s |
| Error rate (%) | Delivery rate | Overhead | Total packets | |||
|---|---|---|---|---|---|---|
| OPP(%) | RA(%) | OPP | RA | OPP | RA | |
| No error | 100 | 100 | 69 | 69 | 14,715 | 14,787 |
| 5 | 78 | 97 | 93 | 70 | 14,516 | 14,897 |
| 10 | 53 | 95 | 123 | 72 | 14,352 | 15,187 |
| 15 | 47 | 92 | 148 | 76 | 14,184 | 15,262 |
| 20 | 36 | 85 | 190 | 81 | 13,995 | 15,286 |
| Error rate (%) | Delivery rate | Overhead | Total packets | |||
|---|---|---|---|---|---|---|
| OPP(%) | RA(%) | OPP | RA | OPP | RA | |
| No error | 100 | 100 | 274 | 274 | 49,481 | 49,908 |
| 5 | 55 | 98 | 489 | 277 | 48,818 | 50,218 |
| 10 | 34 | 95 | 810 | 290 | 48,992 | 51,045 |
| 15 | 24 | 89 | 1174 | 301 | 48,993 | 50,059 |
| 20 | 16 | 80 | 1726 | 346 | 48,996 | 51,954 |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Kim, Y.-P.; Jung, E.; Park, Y.-J. A Radio-Aware Routing Algorithm for Reliable Directed Diffusion in Lossy Wireless Sensor Networks. Sensors 2009, 9, 8047-8072. https://doi.org/10.3390/s91008047
Kim Y-P, Jung E, Park Y-J. A Radio-Aware Routing Algorithm for Reliable Directed Diffusion in Lossy Wireless Sensor Networks. Sensors. 2009; 9(10):8047-8072. https://doi.org/10.3390/s91008047
Chicago/Turabian StyleKim, Yong-Pyo, Euihyun Jung, and Yong-Jin Park. 2009. "A Radio-Aware Routing Algorithm for Reliable Directed Diffusion in Lossy Wireless Sensor Networks" Sensors 9, no. 10: 8047-8072. https://doi.org/10.3390/s91008047