SITHON: An Airborne Fire Detection System Compliant with Operational Tactical Requirements

Abstract
:1. Introduction
1.1. Remote Sensing Systems for Wildfire Emergency Management
2. SITHON
2.1. SITHON project Overview
2.2. Goals and Specifications of the airborne thermal imaging system
- hot spot identification, geo-positioning and alarm generation,
- fire front location and representation on a map,
- isothermal contour lines generation and mapping,
- geo-referenced video (RGB) and thermal image frames projected to the Hellenic Geodetic Reference System (EGSA87) or any other cartographic projection system used by the fire managers in the area of interest,
- synthetic cartographic products integrating georeferenced thermal and/or video images with existing background maps of assets, transportation networks and facilities situated in the area of operations.
2.3. Imaging payload
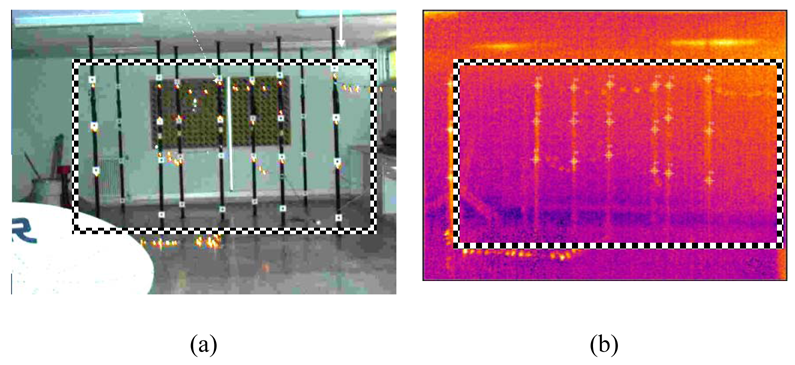
2.3.1. Camera
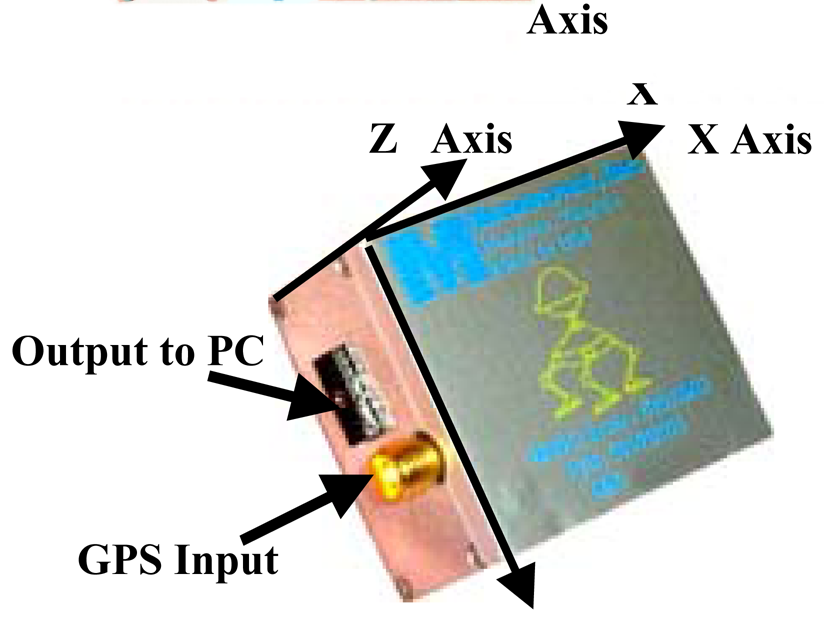
2.3.2. Inertial measuring unit for positioning and orientation
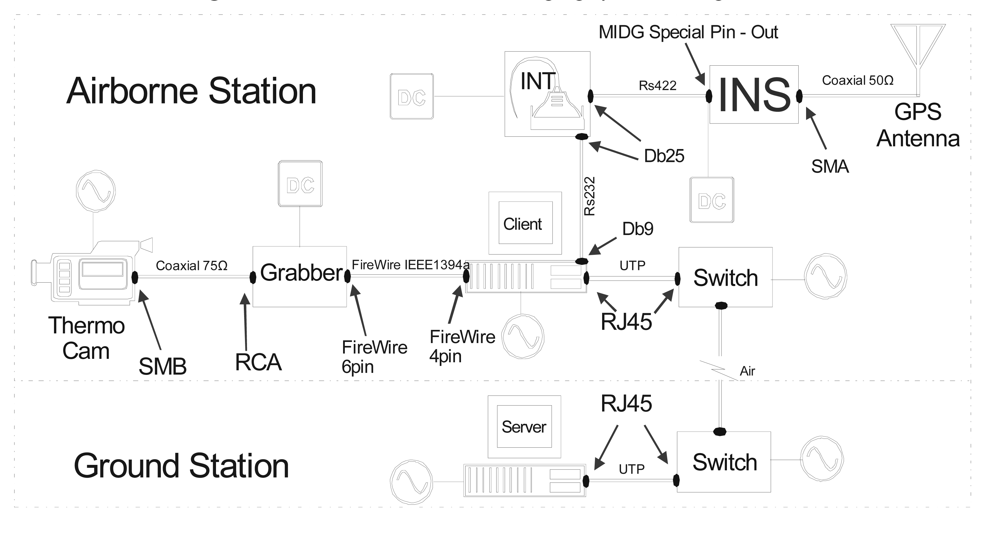
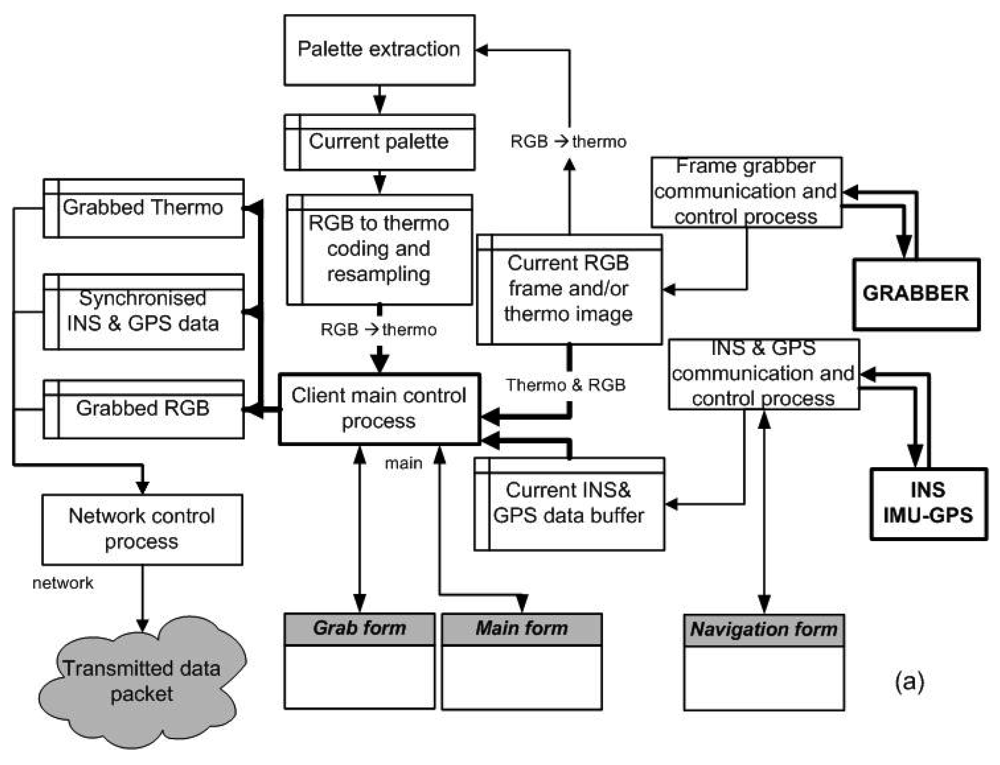
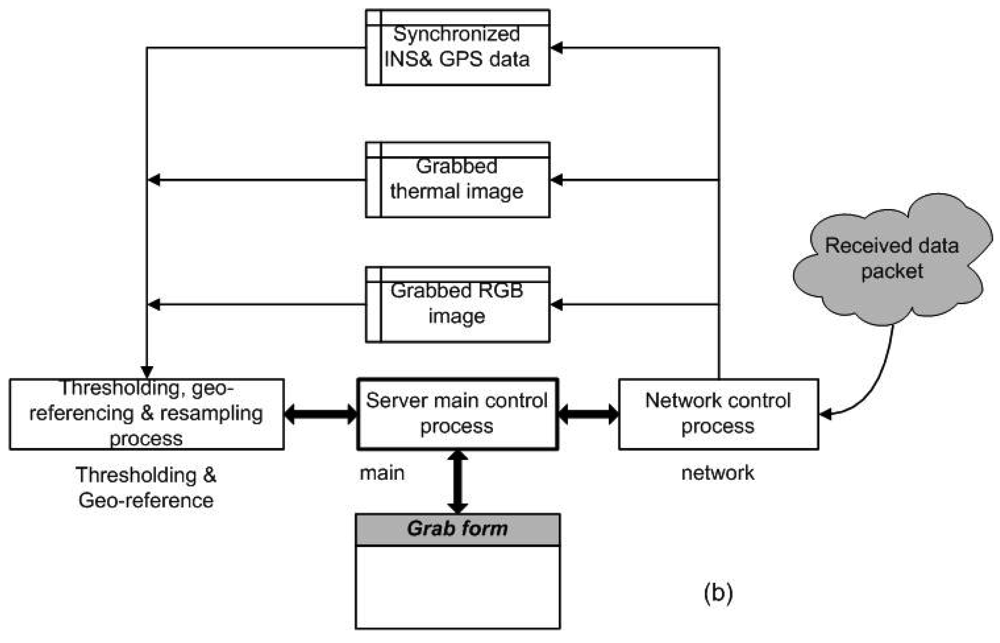
2.3.3. Acquisition control system
2.3.4. Image processing
- image geo-rectification and projection,
- identification of temperature alarms (image processing),
- display of the geographic coordinates of detected hot spots and fire fronts.
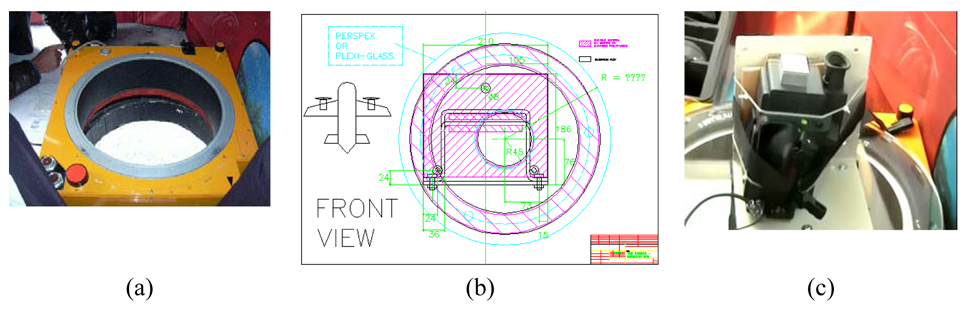
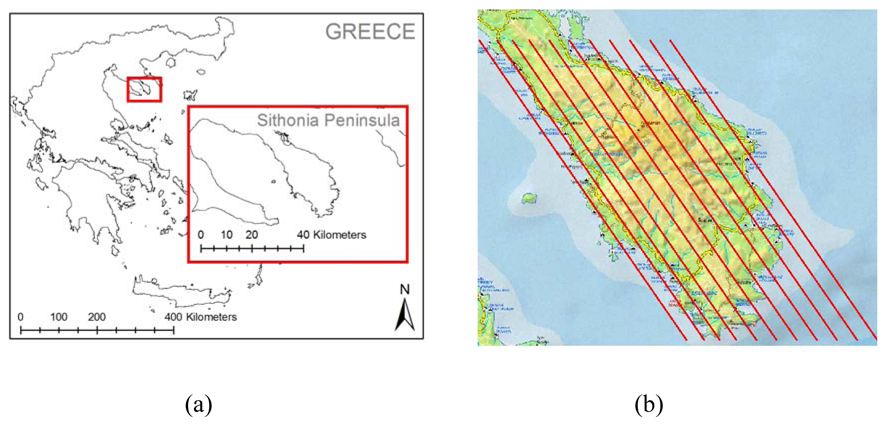
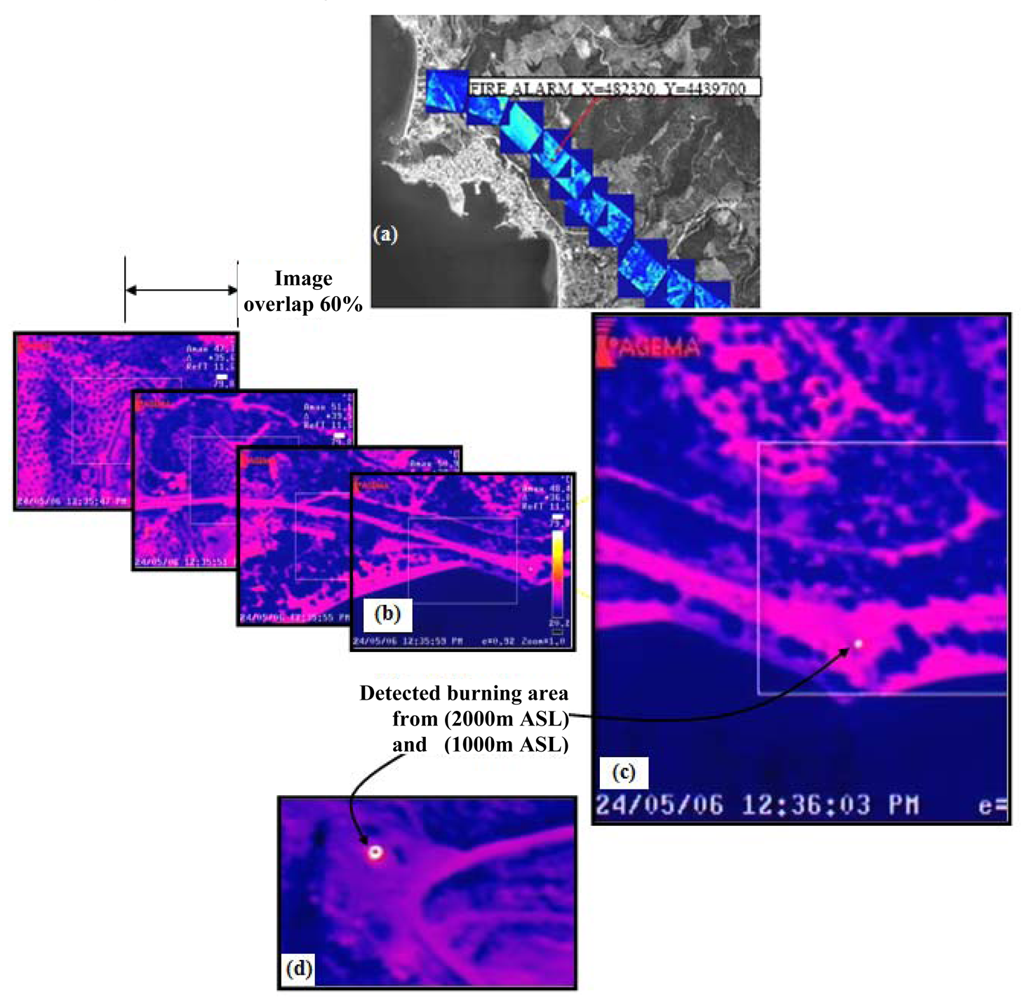
3. Demonstration test flight
4. Conclusions
Acknowledgments
References
- Dull, C.W.; Lee, B. S. Satellite Earth Observation information requirements of the wildland fire management community. In Global and regional vegetation fire monitoring from Space: Planning a coordinated international effort; Ahern, F.J., Goldammer, J.G., Justice, C.O., Eds.; Kugler Publications, 2001. [Google Scholar]
- San-Miguel-Ayanz, J.; Ravail, N.; Kelha, V.; Ollero, A. Active Fire Detection for Fire Emergency Management: Potential and Limitations for the Operational Use of Remote Sensing. Natural Hazards 2005, 25, 361–376. [Google Scholar]
- Rodriguez, Y; Silva, F. Infrared imager: its interest for wildland fire monitoring. EUFIRELAB. 2004. EVR1-CT-2002-40028, D-07-07 http://eufirelab.org.
- Martin-Rico, C.; Gonzalo, J.; Mariani, A.; Leibrandt, W. Fuego system concept. Acta Astronautica 2001, 48, 45–56. [Google Scholar]
- Zhukov, B.; Lorenz, E.; Oertel, D.; Wooster, M.; Roberts, G. Spaceborne detection and characterization of fires during the bi-spectral infrared detection (BIRD) experimental small satellite mission (2001-2004). Remote Sensing of Environment 2006, 100(1), 29–51. [Google Scholar]
- George, C.W.; Ewart, G.F.; Friauf, W.C. FLIR: A promising tool for air attack supervisors. Fire Management Notes 1989, 50(4), 26–29. [Google Scholar]
- Scott, J.P. Fire Mouse Trap use in the Southern Region. Fire Management Notes 1991, 52(3), 37–38. [Google Scholar]
- Ambrosia, V. G.; Wegener, S.S.; Sullivan, D.V.; Buechel, S.W.; Dunagan, S.E.; Brass, J.A.; Stoneburner, J.; Schoenung, S.M. Demonstrating UAV-Acquired Real-Time Thermal Data over Fires. Photogrammetric Engineering & Remote Sensing 2003, 69(4), 391–402. [Google Scholar]
- Light, D. An Airborne Direct Digital Imaging System. Photogrammetric Engineering and Remote Sensing 2001, 67(11), 1299–1305. [Google Scholar]
- Hutton, J.; Melihen, A. Emergency Response-Remote Sensing Evolves in the Wake of Experience. Photogrammetric Engineering and Remote Sensing 2006, 72(9), 977–981. [Google Scholar]
- Keramitsoglou, I.; Kiranoudis, C.T.; Sarimveis, H.; Sifakis, N. A multidisciplinary decision support system for forest fire crisis management. Environmental Management 2004, 33, 212–225. [Google Scholar]
- Vakalis, D.; Sarimveis, H.; Kiranoudis, C.T.; Alexandridis, A.; Bafas, G.V. A GIS based operational system for wildland fire crisis management, I. Mathematical modelling and simulation. Applied Mathematical Modelling 2004, 28, 389–410. [Google Scholar]
- Vakalis, D.; Sarimveis, H.; Kiranoudis, C.T.; Alexandridis, A.; Bafas, G.V. A GIS based operational system for wildland fire crisis management, II. System architecture and case studies. Applied Mathematical Modelling 2004, 28, 411–425. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FOV (field of view) | 24°×18°/0.5 m built in |
| IFOV (instantaneous field of view) | 1.3 mrad |
| Detector type | Focal Plane Array / uncooled Microbolometer 320×240pixels, physical pixel dimension = 26 μm |
| Spectral range | 7.5-13.0 μm |
| Object temperature measurement range | -20 °C to 500 °C (-4 °F to 930 °F) up to +1500 °C (+2700 °F), with high temperature option |
| Measurement accuracy | ± 2 % of range or ± 2 °C |
| Thermal sensitivity | < 0.15 °C |
| Video output | CCIR/PAL Composite and S-video |
| Image radiometric resolution | 12 bit images stored on PC-Card hard disc |
| Camera platform interior orientation parameters (in pixels/ principal point xp, yp and camera constant c) | xo=16,0452, yo=31,6923,c=763,871 (equivalent to 19,86 mm focal length) |
| Flying velocity V (km/h) | Flying height H (m) | Blur (μm) | % FPA pixel size | Area detected on the ground L×W (m×m) |
|---|---|---|---|---|
| 160 | 1,000 | 14.8 | 57% | 416 × 312 |
| 200 | 1,000 | 18.5 | 71% | 416 × 312 |
| 160 | 1,500 | 9.90 | 38% | 624 × 468 |
| 200 | 1,500 | 12.3 | 47% | 624 × 468 |
| 160 | 2,000 | 7.40 | 28% | 832 × 624 |
| 200 | 2,000 | 9.30 | 36% | 832 × 624 |
| IMU Physical dimensions | 3.8 × 2.2 × 4.25 cm |
| IMU Weight | 55 gr |
| IMU Input Voltage | 10VCD-32VDC |
| IMU Power | 1,2 W max |
| GPS antenna connector type | 50 Ohm SMA |
| GPS antenna power | +5 Volt at centre conductor, 25 ma max |
| GPS RF power input | -134 dBm min, -61dBm max |
| Measurements | |
| Attitude accuracy (roll, pitch, and yaw) | 0.4 ° |
| Position accuracy | 3 m CEP, WAAS/EGNOS available |
| Data output rates | Position 10Hz, Velocity, attitude, acceleration 50Hz |
| Flying velocity V [km/h] | Flying height H [m] | Time interval in seconds - stereoscopic view (overlap 60%) | Time interval in seconds - monoscopic view (overlap 0%) |
|---|---|---|---|
| 160 | 1,000 | 3 | 7 |
| 200 | 1,000 | 2 | 6 |
| 160 | 1,500 | 4 | 11 |
| 200 | 1,500 | 3 | 8 |
| 160 | 2,000 | 6 | 14 |
| 200 | 2,000 | 4 | 11 |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Kontoes, C.; Keramitsoglou, I.; Sifakis, N.; Konstantinidis, P. SITHON: An Airborne Fire Detection System Compliant with Operational Tactical Requirements. Sensors 2009, 9, 1204-1220. https://doi.org/10.3390/s90201204
Kontoes C, Keramitsoglou I, Sifakis N, Konstantinidis P. SITHON: An Airborne Fire Detection System Compliant with Operational Tactical Requirements. Sensors. 2009; 9(2):1204-1220. https://doi.org/10.3390/s90201204
Chicago/Turabian StyleKontoes, Charalabos, Iphigenia Keramitsoglou, Nicolaos Sifakis, and Pavlos Konstantinidis. 2009. "SITHON: An Airborne Fire Detection System Compliant with Operational Tactical Requirements" Sensors 9, no. 2: 1204-1220. https://doi.org/10.3390/s90201204