Electromechanical Characteristic Analysis of Passive Matrix Addressing for Grating Light Modulator

Abstract
:1. Introduction
2. The principle of GLM
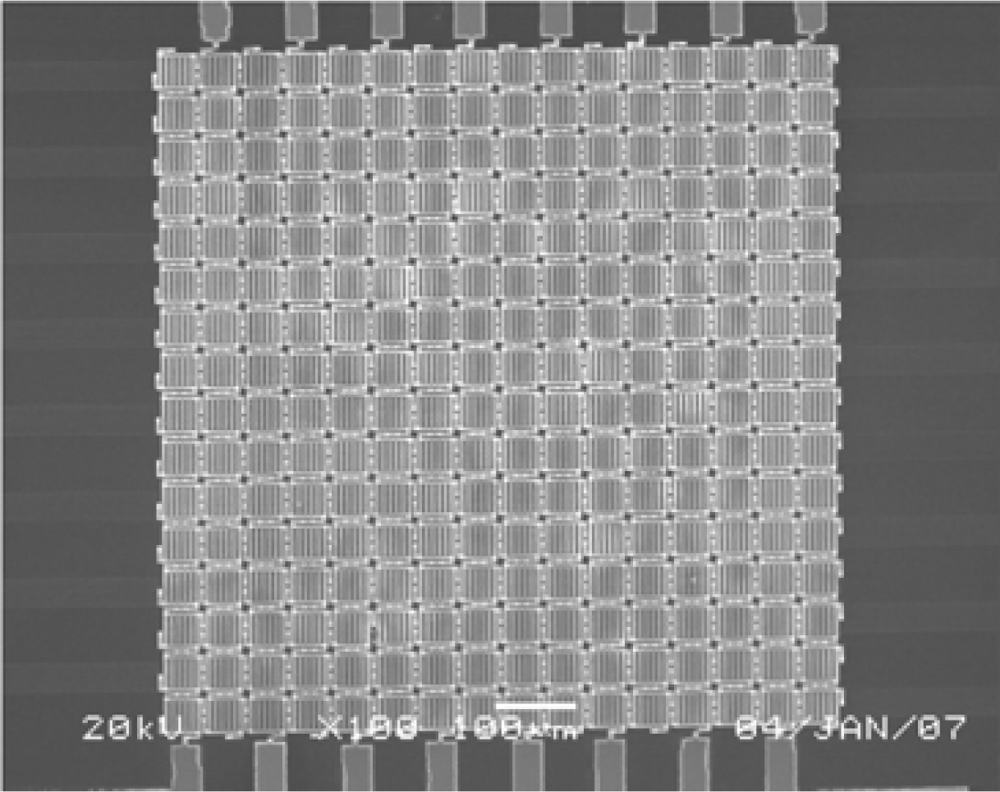
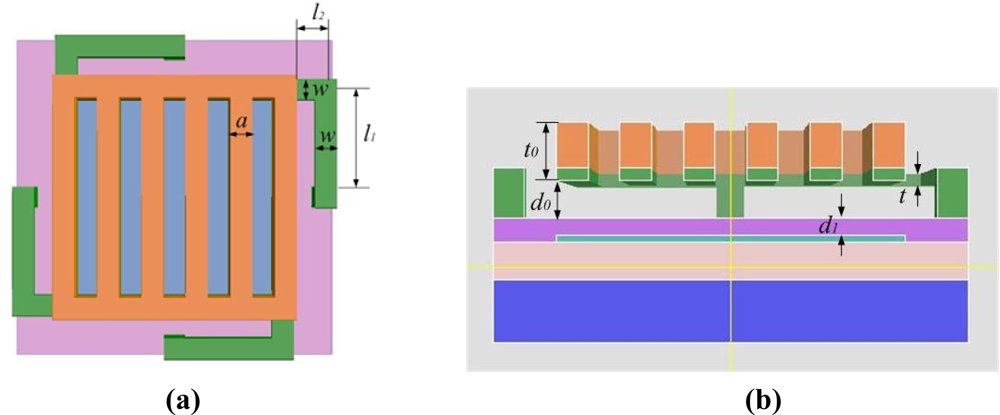
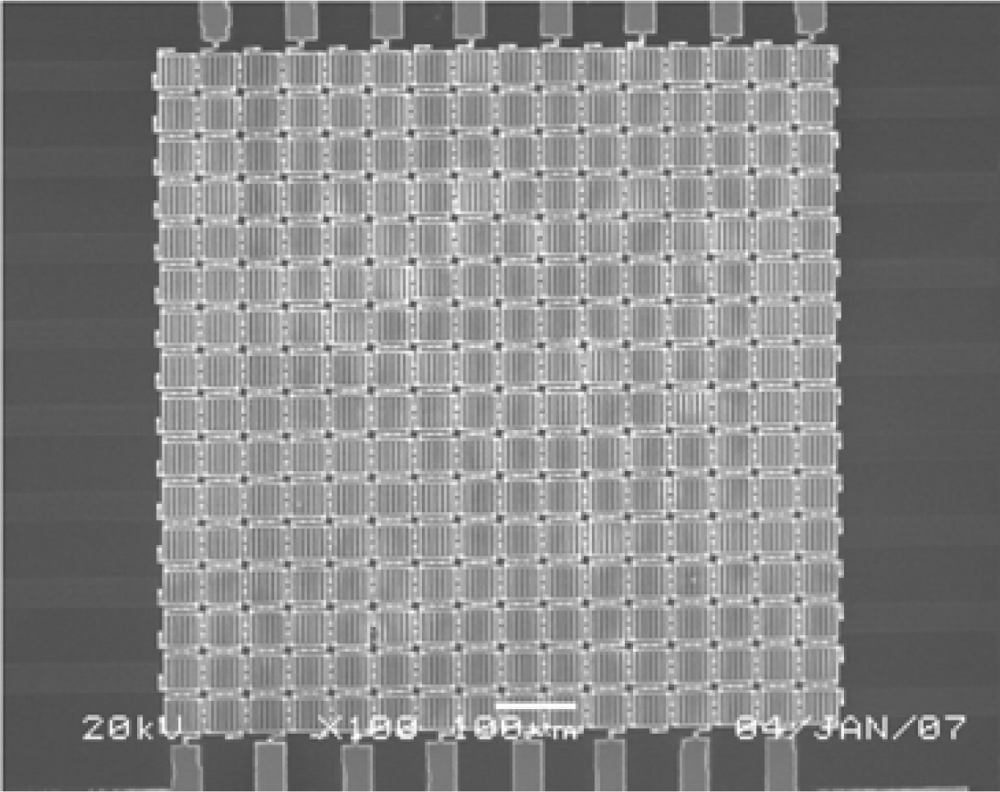
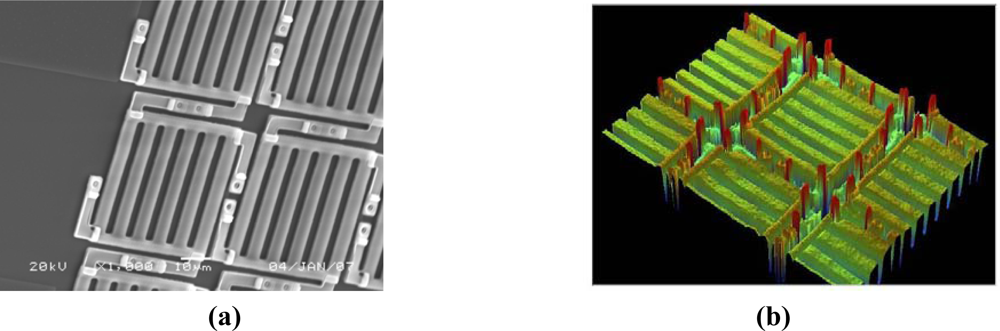
3. Device fabrication
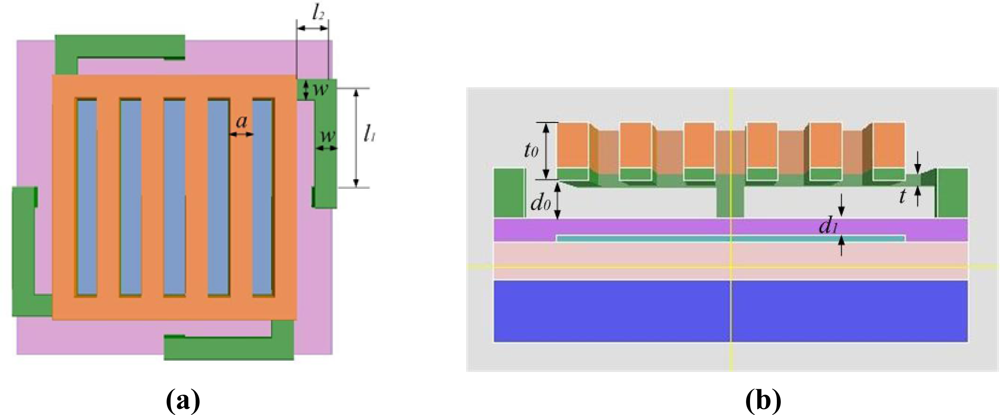
4. Theoretical analysis of the GLM’s electromechanical characteristics
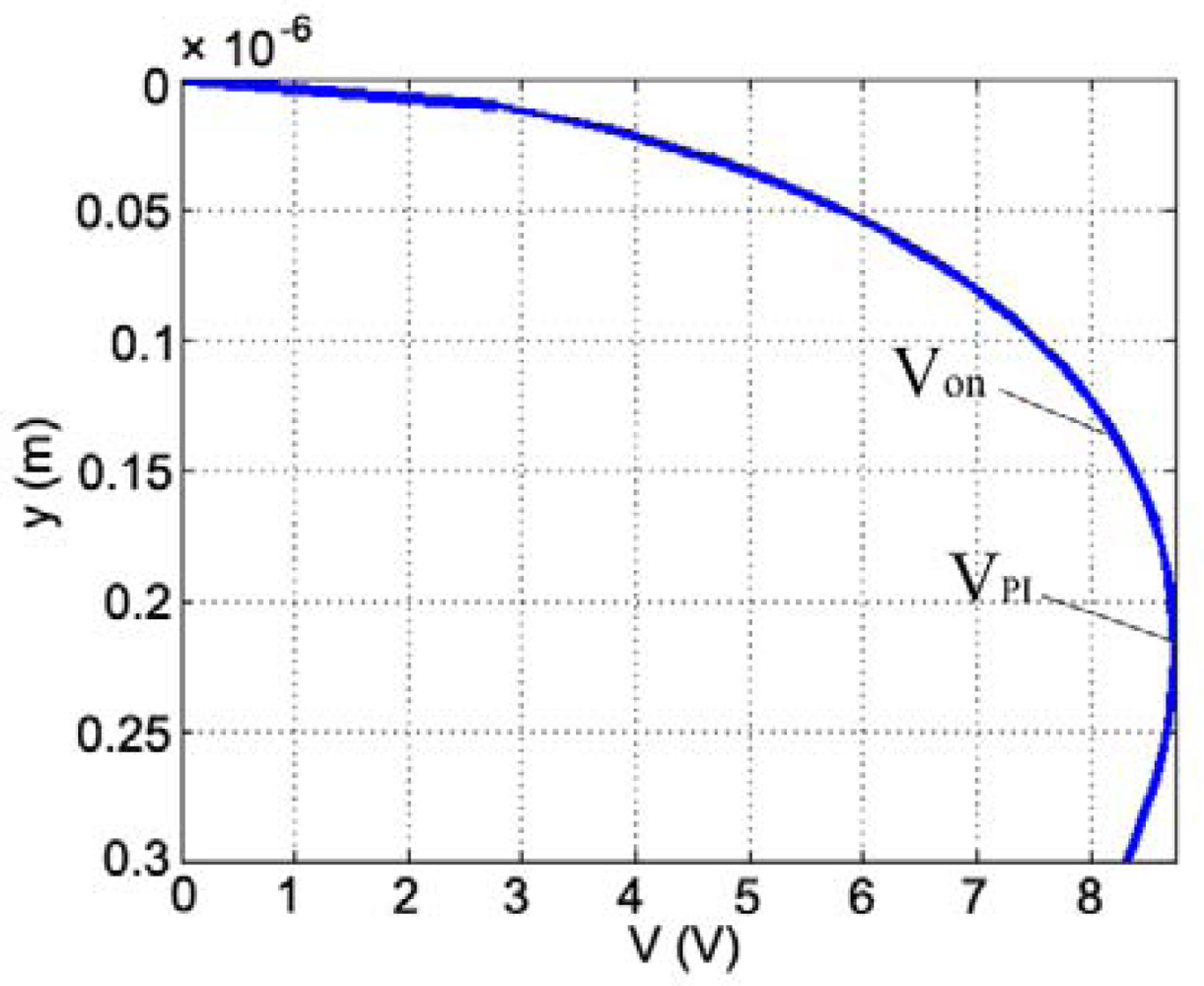
4.1. Response frequency and driving voltage
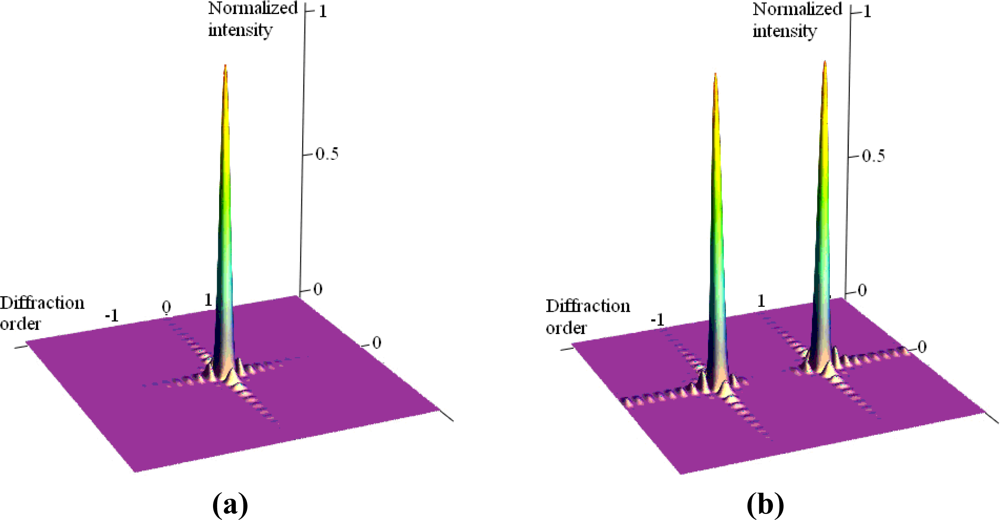
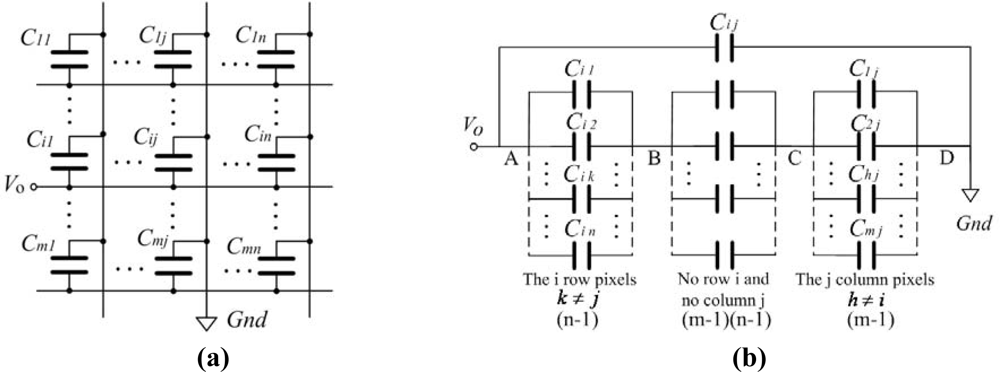
4.2. Analysis of crosstalk in the GLM array
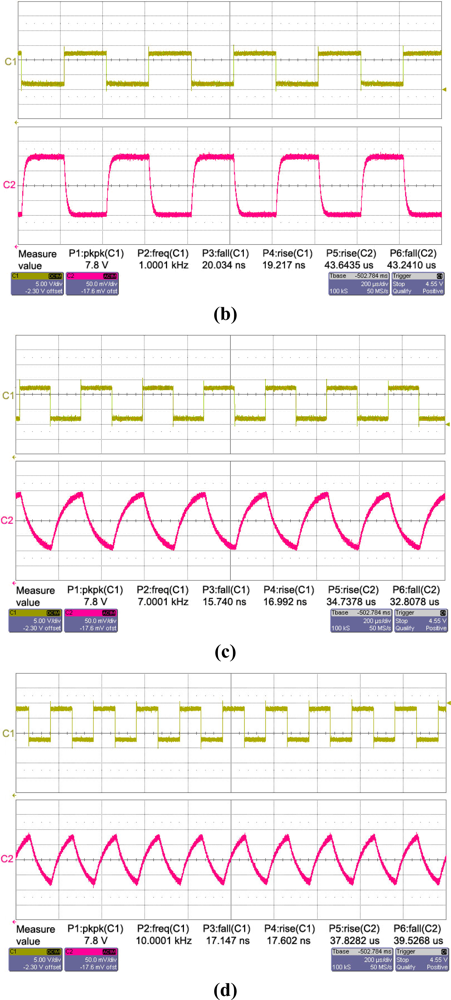
5. Experiments
5.1. Results of driving voltage and response frequency
5.2. Results of the crosstalk
6. Conclusions
Acknowledgments
References and Notes
- Wu, M.C.; Solgaard, O.; Ford, J.E. Optical MEMS for lightwave communication. Journal of Lightwave Technology 2006, 24, 4433–4453. [Google Scholar]
- Tamada, H.; Taguchi, A.; Oniki, K. High contrast and efficient blazed Grating Light Valve for Full-HD 5,000lumen laser projectors. Digest of Technical Papers ICCE2006 2006, 133–134. [Google Scholar]
- Kim, S.; Barbastathis, G.; Tuller, H.L. MEMS for Optical Functionality. Journal of Electroceramics 2004, 12, 133–144. [Google Scholar]
- Hornbeck, L.J. Digital Light Processing TM for high brightness, high-resolution applications. Proc. SPIE, Projection Displays III 1997, 3013, 27–40. [Google Scholar]
- Bloom, D.M. The Grating Light Valve: revolutionizing display technology. Proc. SPIE, Projection Displays III 1997, 3013, 165–171. [Google Scholar]
- Sun, J.Y.; Huang, S.L. Two-dimensional grating light modulator for projection display. Applied Optics 2008, 15, 2813–2820. [Google Scholar]
- Zhang, J.; Huang, S.L. Optimization and analysis for structural parameters of Grating Moving Light Modulator. Acta Optica Sinica 2006, 26, 1121–1126. [Google Scholar]
- Zhang, Z.H. Study on some key technologies of MOEMS-based Grating Moving Light Modulator array, Ph. D. Thesis,. Chongqing University, Chong Qing, P.R. China, 2008; pp. 22–26.
- Yun, W.J. A surface micromachined accelerometer with integrated CMOS Detection Circuitry, Ph. D. Thesis,. University of California at Berkeley, Berkeley, CA, USA, 1992; pp. 78–84.
- Huang, Q.A.; Liao, X.P. RF MEMS Theory, Design, and Technology; Publishing House of Southeast University: Nan Jing, P.R. China, 2005; pp. 26–27. [Google Scholar]
- Lin, T.H. Implementation and characterization of a flexure-beam micromechanical spatial light modulator. Optical Engineering 1994, 33, 3643–3648. [Google Scholar]
- Aliev, A.E.; Shin, H.W. Image diffusion and cross-talk in passive matrix electrochromic displays. Displays 2002, 23, 239–247. [Google Scholar]
- Braun, D.; Rowe, J. Crosstalk and image uniformity in passive matrix polymer LED displays. Synthetic Metals 1999, 102, 920–921. [Google Scholar]
- Seuntiens, P.J.H.; Meesters, L.M.J. Perceptual attributes of crosstalk in 3D images. Displays 2005, 26, 177–183. [Google Scholar]
- Cai, W.J. Circuits theory; Zhejiang University Press: Zhe Jiang, P.R. China, 2006; pp. 11–13. [Google Scholar]
- Ying, G.Y.; Hu, W.B. Flat display technology; Post & Telecommunications Press: Bei Jing, P.R. China, 2002; pp. 193–200. [Google Scholar]
- Stephen, D.S. Microsystem Design; Publishing House of Electronics Industry: Bei Jing, P.R. China, 2004; pp. 123–150. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| d1 (μm) | ε1 | ε0 (F/m) | d0 (μm) | γ | A (μm2) | t (μm) | w (μm) | l1 (μm) | l2 (μm) | E (Gpa) | v | σ (Mpa) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.28 | 3.9 | 8.854 × 10−12 | 0.58 | 1.28 | 1533 | 0.2 | 4.0 | 10.5 | 3.5 | 77 | 0.3 | 100 |
© 2009 by the authors; licensee MDPI, Basel, Switzerland This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Jin, Z.; Wen, Z.; Zhang, Z.; Huang, S. Electromechanical Characteristic Analysis of Passive Matrix Addressing for Grating Light Modulator. Sensors 2009, 9, 2162-2175. https://doi.org/10.3390/s90302162
Jin Z, Wen Z, Zhang Z, Huang S. Electromechanical Characteristic Analysis of Passive Matrix Addressing for Grating Light Modulator. Sensors. 2009; 9(3):2162-2175. https://doi.org/10.3390/s90302162
Chicago/Turabian StyleJin, Zhu, Zhiyu Wen, Zhihai Zhang, and Shanglian Huang. 2009. "Electromechanical Characteristic Analysis of Passive Matrix Addressing for Grating Light Modulator" Sensors 9, no. 3: 2162-2175. https://doi.org/10.3390/s90302162