2.1. Experimental System Design
The whole experimental system is shown as
Figure 1. It has three functions including attracting and immobilizing a single cell, clamping and controlling the ultrasonic probe and outputting a powerful, high frequency sine signal. The whole system was set up on a vibration isolation platform so as to be shielded from external disturbances. Four subsystems are included: a driving component, an actuation component, a micro-manipulation component and a real-time observation and measurement component.
The driving component transported electric energy to an ultrasonic probe to drive the piezoelectric material. The core component was an ultrasonic signal generator (1).
The ultrasonic signal generator (1) was designed for and implemented in this study. It produces a sine wave signal, whose frequency can be specified from 10 Hz to 999 kHz. The maximum signal amplitude can reach 400 V. It has the function of automatically regulating the frequency of the ultrasonic probe. The actuation component includes an ultrasonic probe (3) and a single cell attracting device (4). The ultrasonic probe (3), equipped with a nano tungsten needle, is the core component of the whole system. It was designed and optimized in this study.
The single cell attracting device (4) optimized for single cell catching was designed based on a medical transfusion system. Cells (7) were placed in the glass service (5). A cell may be attracted on the tip of a glass capillary and be moved to any positions where it is expected to be.
The micro-manipulation component consists of two three-dimensional micro-manipulators (2) and two pressure-conditioning devices (6). The smallest three-step movement the micro-manipulators can achieve in X, Y, or Z directions is one micron; they are set up with optical fixtures for clamping the ultrasonic probe (3) and the attracting device (4). The pressure-conditioning devices (6) control the attraction intensity of the attraction device (4) and the output of the probe (3).
The real-time observation and measurement component consists of a biological inverted microscope (9), a high-speed camera, a computer (10) and its corresponding software. All devices were installed on a vibration isolation platform (8) so that they were shielded from external disturbance.
2.2. Ultrasonic Generator Design and fabrication
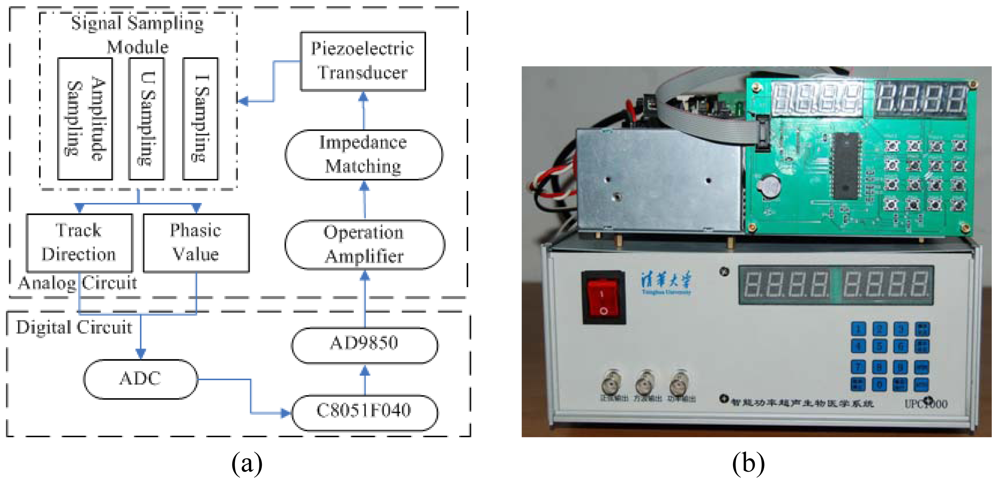
A series of experiments attempting to puncture a single cell were conducted, and they showed that when the ultrasonic probe was operated, its working characteristics would change. Compared with the unloaded condition the working frequency changed and the bandwidth of the admittance of the real part and radius of the admittance circle changed accordingly. In order to ensure that the probe is working in resonance and the output acoustic impedance matches the loading impedance, an automatic regulator had to be designed to regulate the frequency of the ultrasonic probe. A new ultrasonic generator, which consisted of a DDS synthesizer, a power amplifier and an automatic frequency regulator, was manufactured to improve the working stability of the system.
Figure 2(a) presents the block diagram of its structure, and (b) is a picture of the ultrasonic generator be developed.
A frequency control signal chip (AD9850), using advanced direct digital synthesis (DDS) technology, generated a pure, frequency/phase-programmable, analog output sine wave. A switch capacitor filter (MAX268) was used to filter the signal from AD9850. The filter center frequency changed with the input frequency. A high-voltage, high-precision MOSFET op-amp (PA85) was the key component in the power operation amplifier. The amplifier can achieve the linear amplify function and adjust the frequency. Signal sampling module consisted of amplitude sampling, voltage sampling and current sampling. A micro-controller (C8051F040) was used to sample the input and output of the voltage and current. The frequency and amplitude of the ultrasonic probe were controlled by the micro-controller.
2.3. Ultrasonic Probe Design and fabrication
The ultrasonic probe consists of a transducer, an ultrasonic horn and a nano needle. The transducer is the key part, which utilizes piezoelectricity and transforms electrical energy into mechanical vibrations. The ultrasonic horn, which has the effect of amplification and coupling, is used to impel the needle. The nano tip of the ultrasonic probe is made of tungsten, which was etched by an electrochemical method [
12].
The frequency, displacement and acceleration of the ultrasonic probe are necessary to be considered in order to ensure the penetration of a cell. The acceleration can be expressed as:
where,
f, A, φ are the frequency, amplitude and initial phase respectively. The breakdown acceleration threshold of a soft tissue is about 50,000 g (g = 9.8 m/s
2). If the frequency and the amplitude were 40 kHz and 7.7 μm respectively, the value of acceleration would exceed the threshold value of 50,000 g.
The Precise Four Terminal Network Method and Finite Element Simulation, with which the ultrasonic probe is designed, are introduced as follows: an ultrasonic transducer was schemed out by the four-terminal network method [
13-
15], which is a novel design method. Its basic principle is that a single level ultrasonic horn can be regarded as an equivalent mechanical four-terminal network. Every adjacent level is connected in series (see
Figure 3).
An arithmetic expression of n level network is shown in
(2):
where
F, V are the force and acceleration of each level of ultrasonic horn, respectively.
α is a shape parameter related to the horn's geometrical shape, material parameters, dimensions and resonance frequency. The two ends of the ultrasonic horn are not restricted. So
F1=
Fn=0. The
equation (2) is simplified to
(3):
In
equation (3) V1≠0,
α12=0. Before an ultrasonic probe is fabricated, the parameters which include the diameter and length of each layer and the value of harmonic frequency must be given. If the harmonic frequency and the diameter of each layer were estimated in advance according to the given amplitude ratio and other requirements, and some lengths of the ultrasonic horn were also confirmed and only one parameter was unknown, and this unknown parameter can be obtained from
equation (3).
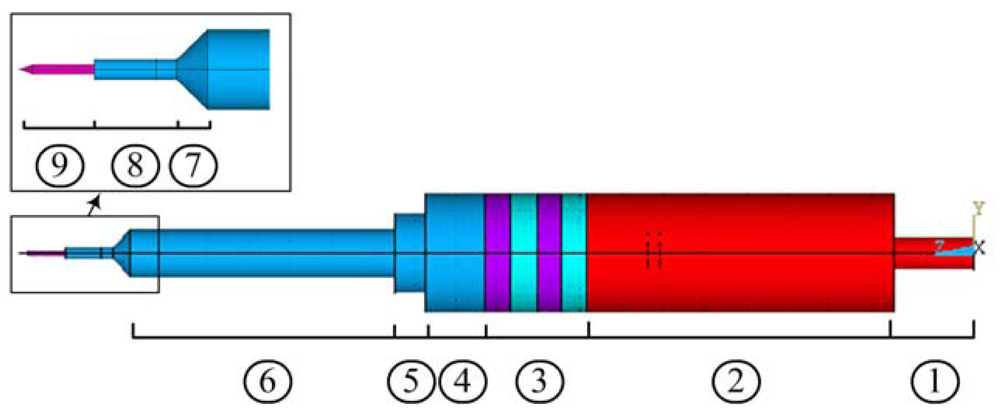
Based on the theory above, a Precise Four Terminal Network computation software package was developed. With the software, the vibration resonant frequency can be obtained. If the resonant frequency is known, the size of one layer can be solved. The final design scheme is shown in
Figure 4, and materials and parameters are listed in
Table 1.
In this design, the echeloned ultrasonic horn was adopted to achieve higher amplitude magnification. A conic transition region was introduced to the transformable section to protect the probe against stress centralization. The tungsten needle was etched by an electrochemical method, and a tungsten tip of nanometer apex dimension was produced. Electrodes were placed on the two surfaces orthogonal to the polarization axis.
The designed amplification ratio of the amplitude was 10. The resonance frequency was 40 kHz. With high transfer efficiency of electric-mechanic and low heat generation coefficient, the piezoelectric material (PZT-8) is very suitable for miniature actuators. The back end of the probe was made of brass (which has high acoustic impedance) in order to reduce the length and to increase the energy transfer to the front part. The front end of the probe was made of titanium alloy, which is stiff with low density. It was not easy to deform into a small diameter. The diameter of the tungsten tip was designed to be only 5 μm in order to easily puncture a cell (the diameter of a cell being 100-500 μm).
FEM software (ANSYS 9.0) was used to evaluate status, resonant frequency and displacement of an ultrasonic probe through the model analysis and the harmonic analysis. The finite element model was established using the structural parameters (see
Table 1). Properties of brass, titanium alloy and tungsten, which contained Young's modulus, Poisson's ratio, density, were referred to in the table of material properties. Setting properties of piezoelectric material was the key. A piezoelectric model required the permittivity (or dielectric constants) matrix [
εr], the piezoelectric matrix [
e], and the stiffness matrix [
c] to be specified as material properties. The PZT8 material we used was polarized along the Z axis. The constitutive matrices (4) ∼ (6) were as shown below:
Piezoelectricity is the coupling of structural and electric fields, which is a natural property of some materials such as quartz and ceramics. Piezoelectric thin films were modeled using 3-D Coupled-Field Solid5. Since the model was complex, the regular parts were meshed to the hexahedral elements by sweeping generation and the irregular parts were meshed to the tetrahedron elements by automatic generation. The FEM grid model is shown in
Figure 5.
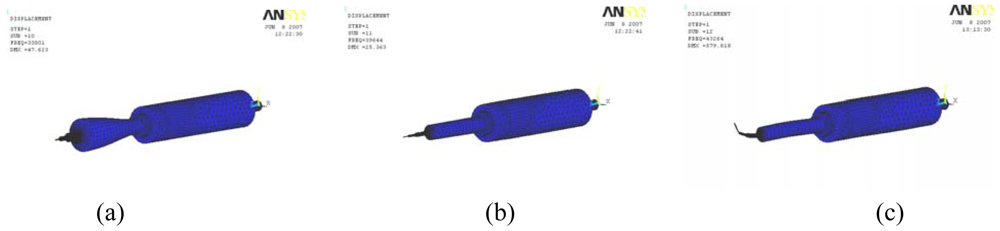
Model analysis was performed using the Block Lanczos method.
Figure 6 shows three modes, all of which have a frequency of about 40 kHz. Among them, the second mode at 39.644 kHz was the longitudinal vibration that we expected.
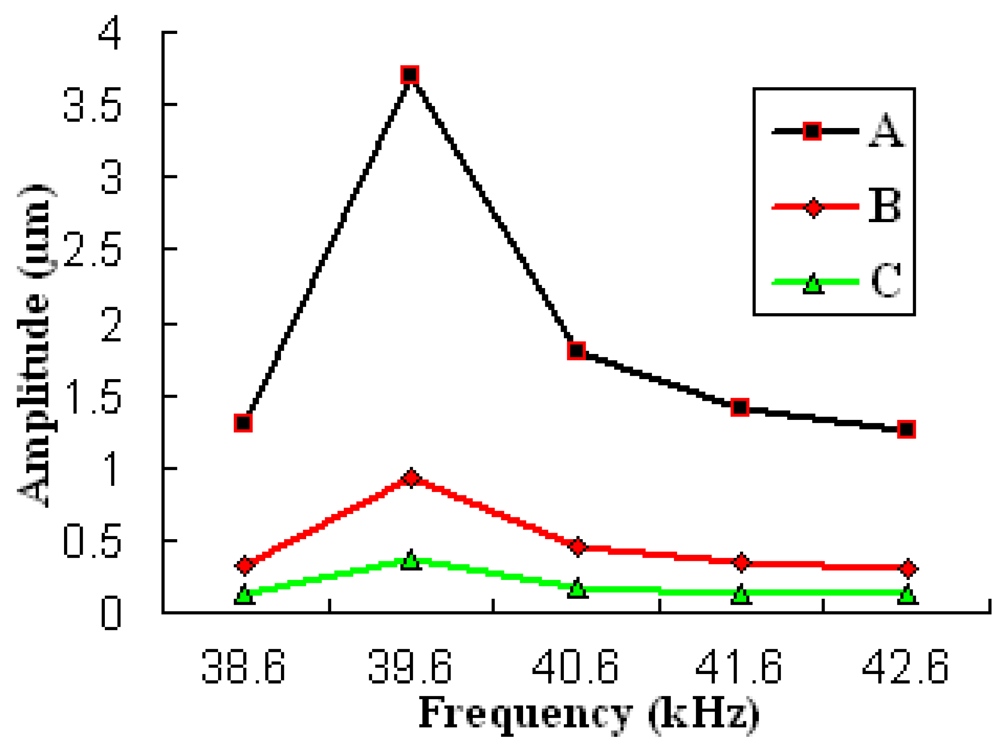
The Jacobi Conjugate Gradient (JCG) solver was selected in full harmonic analysis. The displacement of all nodes could be obtained in post-processing analysis. We took three different points A, B and C, which are indicated by sections 9, 6 and 3 in
Figure 4 respectively. The amplitudes of different points when the input voltage was 60 V are shown in
Figure 7. The amplitude of each section was different, and the points in the same section had the same amplitude.
The energy transfer relationship of the horn can be found in
Figure 7. The amplitude of the tip (A) was 3.7 μm, and the amplitude of the piezoelectric ceramic (C) (the end segment of the horn) was 0.39 μm under the frequency of 39.644 kHz. The amplitude ratio was 9.5, which was close to the design value of 10. From the result of the FEM, the axial amplitude of the probe was 3.7 μm, and the radial amplitude was 1.38×10
-2 μm by a driving voltage of 60 V. We calculated that the ratio of the vibration velocity in lateral direction to that in longitudinal direction was about 0.0037.
Based on the above calculations, an ultrasonic probe with a nano tungsten needle was fabricated as shown in
Figure 8. The cell penetration experiments were done using this probe.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}