1. Introduction
Synthetic aperture interferometric radiometers have been successfully used in radio-astronomy and more recently, they have been proposed for Earth observation as well. In radio-astronomy, due to the large antenna spacing, calibration is usually performed taking advantage of mathematical properties of the observables (cross-correlations between pairs of receiver outputs) [
1]. However, in Earth observation, due to the wide field of view, the antennas must be closely spaced and have a very wide pattern, which increases mutual coupling effects. In addition, the magnitude of the observables decreases much faster with the antenna spacing and the signal-to-noise ratio rapidly degrades, preventing the application of redundant space calibration (
RSC) or other techniques used in radio-astronomy [
1,
2].
MIRAS, the single payload of
ESA’s
SMOS mission [
3], is the first synthetic aperture radiometer devoted to Earth observation. Its calibration is based on the injection of distributed noise as an alternative solution to alleviate the mass, volume and phase/amplitude equalization technological problems associated with the injection of centralized noise from a single noise source [
4]. A similar approach has been implemented in other instruments, such as the Geostationary Synthetic Thinned Aperture Radiometer (
GeoSTAR) [
5], and mixed approaches with two-level noise injection plus
RSC have been proposed for Geostationary Earth Orbit Atmospheric Sounder (
GAS) [
6].
Although distributed noise injection overcomes the technical challenges of centralized noise injection, it has also several limitations:
only separable errors, those can be assigned to each particular receiver, can be calibrated [
7], and
the thermal noise introduced by the equalized distribution network itself introduces an error [
8,
9] that must be compensated by taking differential measurements acquired with two different noise levels.
Recently, arbitrary waveform generators have been used to generate controlled partially correlated noise calibration standards (
CNCS) [
10]. In this work, it is proposed the use of centralized Pseudo-Random Noise (
PRN) sequences for calibration purposes.
PRN signals are periodic signals with very long repetition periods that are used in a variety of applications, such as Code Division Multiple Access (
CDMA) communications or Global Navigation Satellite Systems (
GNSS). They have a relatively flat spectrum, resembling that of thermal noise, over a bandwidth determined by the symbol rate. The calibration of microwave correlation radiometers (either aperture synthesis, interferometric, or polarimetric) can benefit from these properties by replacing the noise sources by
PRN generators. This approach has several advantages:
the signal amplitude is constant, which allows higher receivers input power levels than in the case of injecting noise, without the need to allow a margin to avoid signal clipping. This makes the calibration less sensitive to the receivers’ thermal noise,
all receivers are driven with the same PRN signal, which allows the calibration of baseline errors as well (baseline calibration refers to all errors associated to the particular pair of receivers forming a baseline, and not just the “separable” error terms that can be associated to each particular receiver) ,
1 bit/2 level digital correlators can be used, the same ones typically used for the noise signals to be measured later on,
the signal pattern is deterministic and known, which allows new calibration strategies different from the cross-correlation between receivers’ outputs, such as the cross-correlation of receivers’ output with an exact replica of the input sequence,
new approaches to distribute the calibration signal such as:
- electrical distribution at baseband,
- optical distribution with a modulation at RF followed by an opto-electrical conversion at each receiver input, or even
- the generation of the calibration signal at each receiver’s input using a reference clock, and
the PRN source can be turned ON for calibration and OFF during the measurements, without the thermal stabilization problems of noise sources. At the same time the isolation requirements of the input switch are fulfilled and EMC problems minimized.
In principle, other signals covering the whole receivers’ bandwidth could be used as well (chirp signals, etc.). However, in these cases the relationship between the measured correlation and the true one depends on the number of bits [
11], and to increase the scale of integration of the correlators and reduce the power consumption, the number of bits is usually limited to 1 or 2 at most. This prevents using signals that do not behave as noise, unless the signal-to-noise ratio becomes too low.
This paper is organized as follows. First, the theoretical background and simulation description are introduced. Then, to validate the working principle, experimental results of the technique based on the Passive Advanced Unit for ocean monitoring (
PAU) instrument [
12,
13] are presented. After that, a potential implementation using an optical fibre network is proposed to boost the advantages of this new calibration approach. Finally, a summary of the main conclusions of this work are discussed.
This innovative technique for calibrating microwave correlation radiometers can be applied as well to other communication systems or phased-arrays where the receiver’s frequency response needs to be measured with the system turned on.
2. Theoretical Basis and Simulator Description
One of the most important phases of the measurement acquisition using a correlation radiometer is the calculation of the so-called Fringe-Wash Function (
FWF) [
14]. It provides an estimate of the spatial decorrelation of the signals measured by the instrument due to the different paths toward the different antennas. Its phase and amplitude at the origin (
τ = 0) are required to calibrate the correlation radiometer. In synthetic aperture interferometric radiometers, the shape of the
FWF around
τ = 0 is also used in the image reconstruction algorithms to compensate for the spatial decorrelation effects out of boresight. If receivers’ frequency responses are exactly the same, the
FWF phase is equal to 0°, and its amplitude is equal to 1.
Considering a signal x(t) injected as input to the i-th receiver of a correlation radiometer, the output signal yi(t) will be function of the frequency response of the receiver itself Hi(f); if the input signal spectrum covers the receiver’s bandwidth, it is then possible to retrieve Hi(f) from x(t) and yi(t).
To avoid error amplification, the spectrum of x(t) must preferably be flat over the whole receiver’s band, generally thermal Gaussian noise is used in this kind of applications, but another type of signals that exhibit a flat spectrum over a given bandwidth are the PRNs, widely used in CDMA and GNSS.
The
FWF of the baseline formed by channels
i and
j can be estimated from the normalized cross-correlation
ρij [
15] between the output signals
yi(t) and
yj(t). The correlation is calculated according to
Equation (1), where
N is the number of samples, and the result is normalized as shown in
Equation (2):
It has to be pointed out that in the usual definition-, the
FWF is normalized with respect to its value at the origin (
FWFij (
n) =
ρij (
n)/|
ρij (0)|), while in
Equation (2), it is normalized with respect to its maximum value.
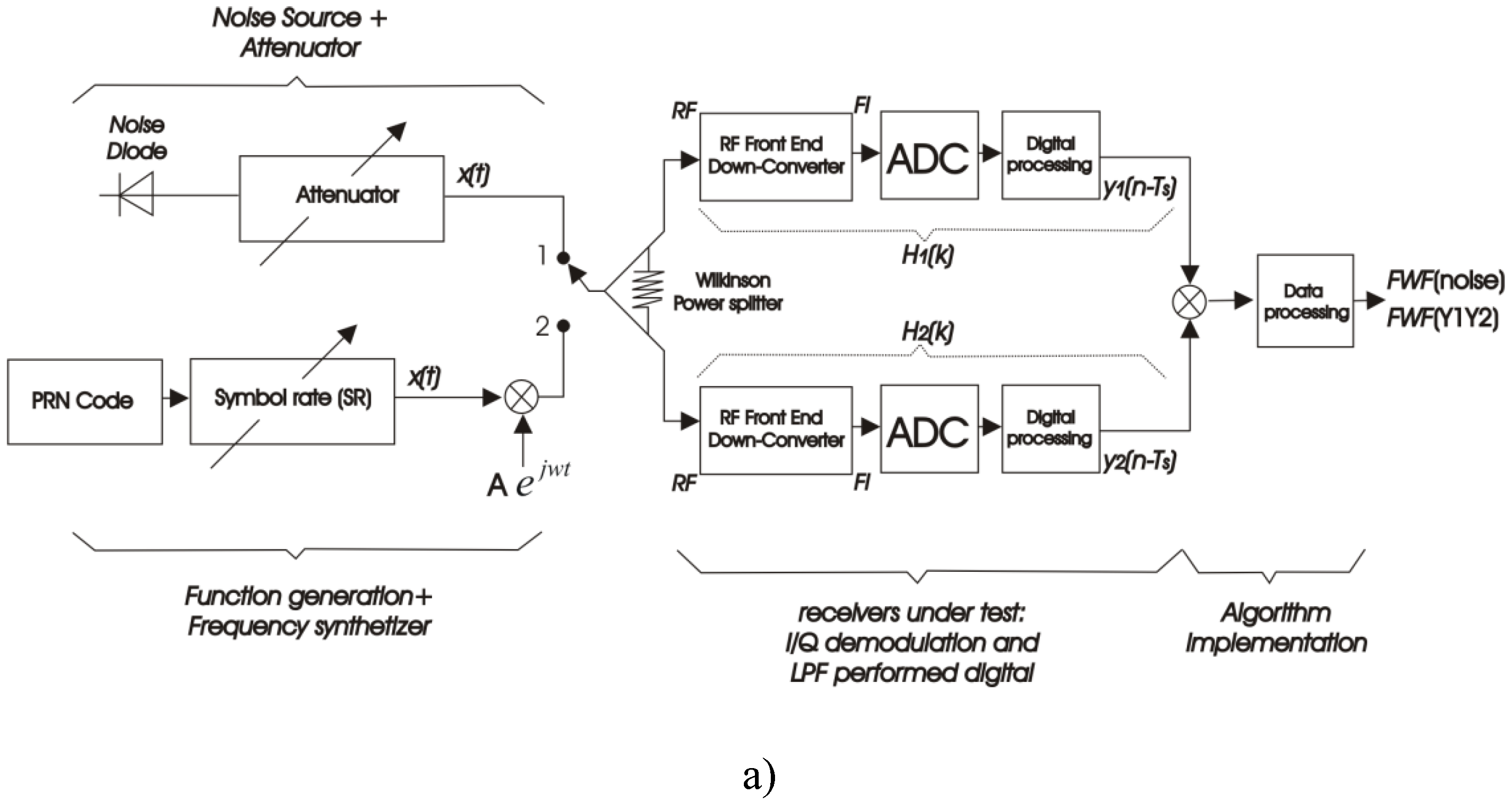
Two calibration methods are considered: injecting noise [
FWF(noise)], as in
Figure 1a with the switch in position 1, and injecting the
PRN sequence [
FWF(Y1·Y2)], as in
Figure 1a with the switch in position 2. In both the cases several noise sources affect the result of
Equation (1) such as the noise distribution network, the thermal noise present in
PRN signal itself, leakages of the local oscillator noise through the mixer etc. All these contributions must be estimated and compensated for by taking differential measurements [
9].
To overcome this problem PRN signals can be used to compute the receiver’s frequency response of the receivers before calculating the FWF. The receiver’s frequency response is computed through the correlation between a baseband replica of the PRN signal injected [x(n)] and the sampled output signals [Recall that the output signals are represented in complex form by their in-phase and quadrature components as: y(n) = i(n) + j·q(n)].
Being
yi(n) =
h(n) *
x(n) +
n(n), where
h(n) is the discrete impulse response of the receiver and
n(n) is a random noise term, and expressing the correlation between
x(n) and
yi(n) by
Equation (3):
The receiver’s frequency response can be calculated computing the Discrete Fourier Transform (
DFT) of
Rxyi:
It has to be noticed that in (4) the correlation between x(n) and n(n) is zero.
Once the frequency response of the two channels involved
Hi(k) and
Hj(k) is determined, the
FWF can be finally computed from:
where
IDFT stands for the inverse
DFT.
3. Experimental Validation of the Technique
The performance of the proposed technique has been assessed by measuring the
FWF and its value at the origin in three different ways:
In order to compare and evaluate the performance of this technique, the first method, or ideal case, has been implemented injecting thermal noise [
4] [“
FWF(noise)”, as shown in
Figure 1a, with the switch in the position 1]. The
FWF is computed directly from the cross-correlation of the output signals of each channel using
Equations (1) and
(2).
In the second method [“
FWF(Y1·Y2)”], the signal noise is replaced by a PRN signal (
Figure 1a with the switch in the position 2). The
FWF is also computed using
Equations (1) and
(2).
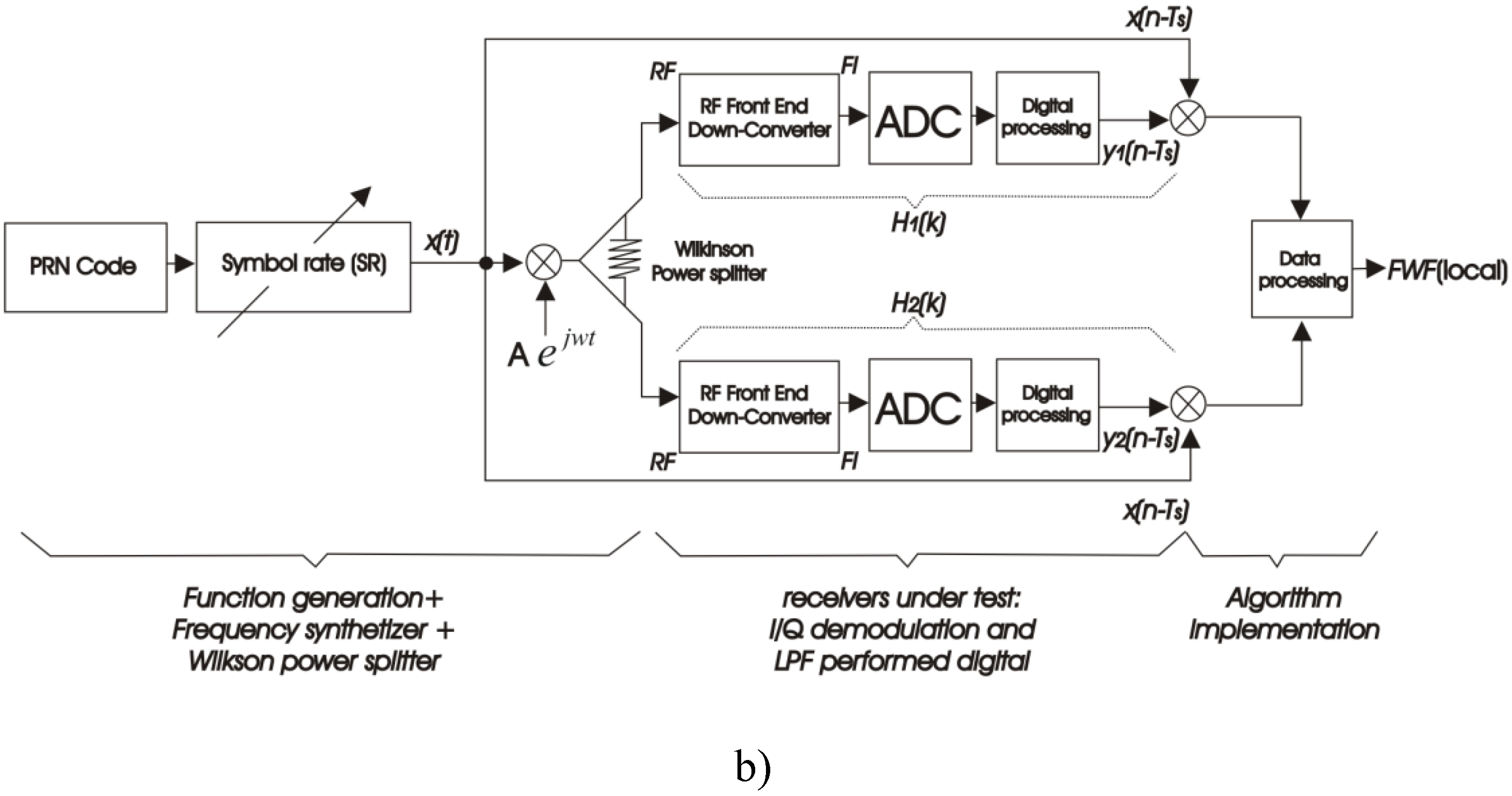
In the third method [“
FWF(local)”, in
Figure 1b] the output signal of each channel
yi(n) and
yj (n) is correlated with a local replica of the
PRN (
x(n
)] to obtain
Hi(k) and
Hj(k) as in
Equation (5). The
FWF is then computed according to
Equation (7). As additional feature, this method allows also to make a diagnosis of the receivers’ frequency response, which can be very helpful in monitoring the instrument’s health.
The
PRN code is generated using a Linear Feedback Shift Register (
LFSR) [
16].
The selected length is 1,023 chips, which are recorded in an Agilent 33250A function generator, and upconverted using a Rodhe & Schwarz SMR40 frequency synthesizer.
The parameters that can impact the estimation of the FWF are:
1) the Symbol Rate (
SR) defined as the ratio of the bandwidth of the
PRN signal (
BPRN) and the receiver’s low-pass equivalent bandwidth (
B) [
Equation (8)]. The
BPRN is related to the sequence duration
τPRN and the number of chips (a chip is like a bit, but it does not carry any information)
Nchips, as shown in
Equation (9):
and:
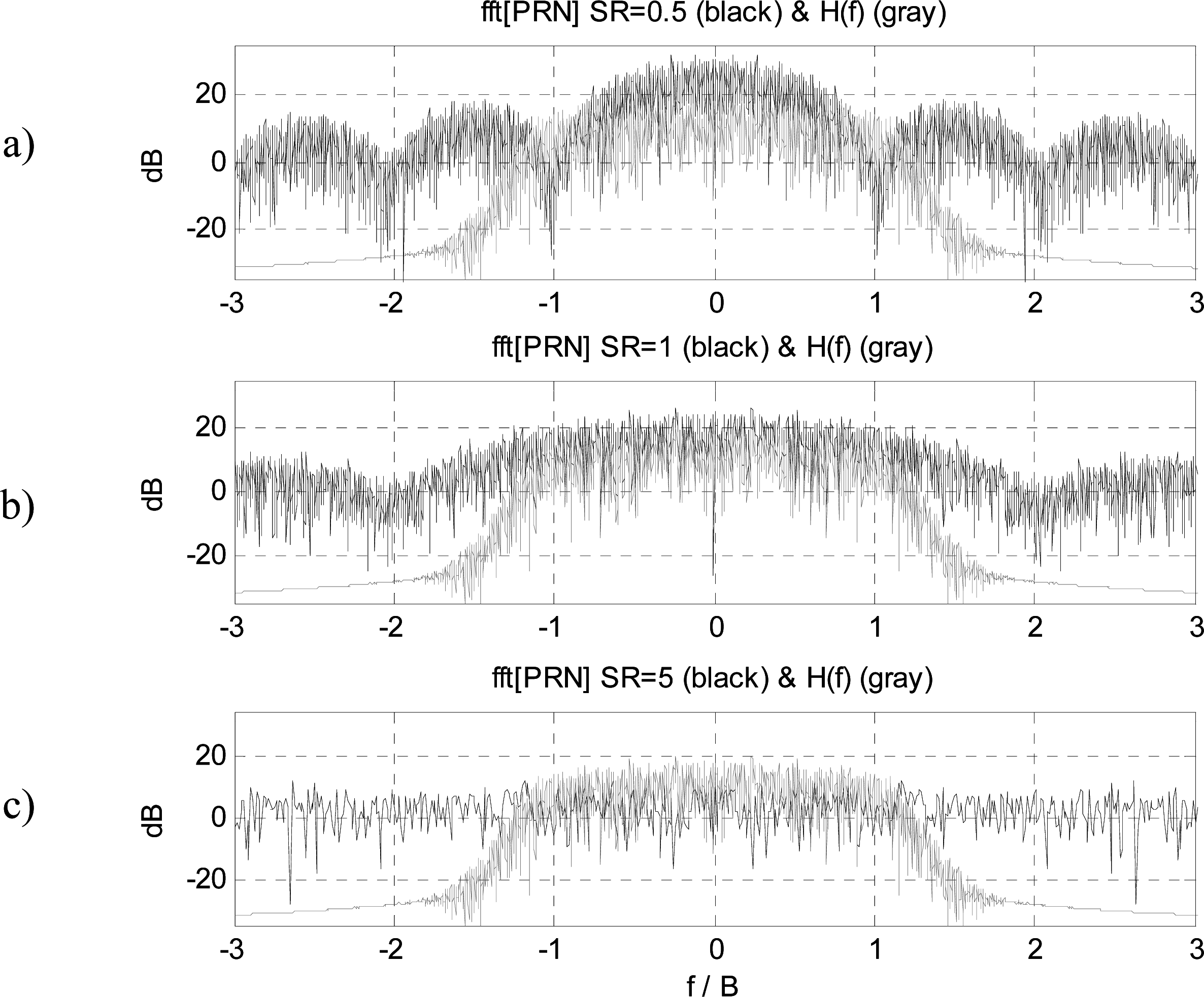
The higher the
SR, the larger the bandwidth of the
PRN signal spectrum, and the flatter is the spectrum within the receiver’s bandwidth (
Figure 2). The minimum sampling frequency (
fs) corresponds to one sample per chip
Ts =
1/BPRN.
2) the equivalent noise temperature of the PRN signal (TPRN) at receivers’ input, defined in terms of the PRN signal’s amplitude (A) : PPRN=A2/2≙kB·TPRN·BPRN, where PPRN is the PRN signal power and kB is the Boltzmann constant (1.3806503 × 10−23 m2kg s−2K−1). The values of TPRN have been selected to be in the 6 K∼65,000 K range,
3) the number of averages. In fact since the
PRN sequences are deterministic, averaging the measured Γ
ij (
n) values [
Equation (6)], reduces the errors associated with the receiver’s thermal noise (
kB·
TR·
B, being
TR the receiver’s noise temperature). And,
4) the number quantization of bits.
Without lost of generality the described algorithms are tested using a PAU receiver [
17] with the following parameters: gain
G = 112 dB, noise figure
F = 2.7 dB (
TR = 250 K), RF bandwidth
B = 2.2 MHz low-pass equivalent bandwidth= 1.1 MHz, central frequency
f0 = 1.57542 GHz, intermediate frequency
fIF = 4.309 MHz. Results are presented normalized to the receiver’s bandwidth.
In this set-up the
SR can be easily modified by reading the look-up table in the function generator at different speed. If the whole table is read in
τPRN = 1 ms and
BPRN =
B, then
SR = 1 [
Equations (8) and
(9)]. The power level is adjusted with the frequency synthesizer. To minimize receiver’s noise, 200 consecutive
PRN sequences are averaged, i.e. the integration time is
Ti = 200
τPRN.
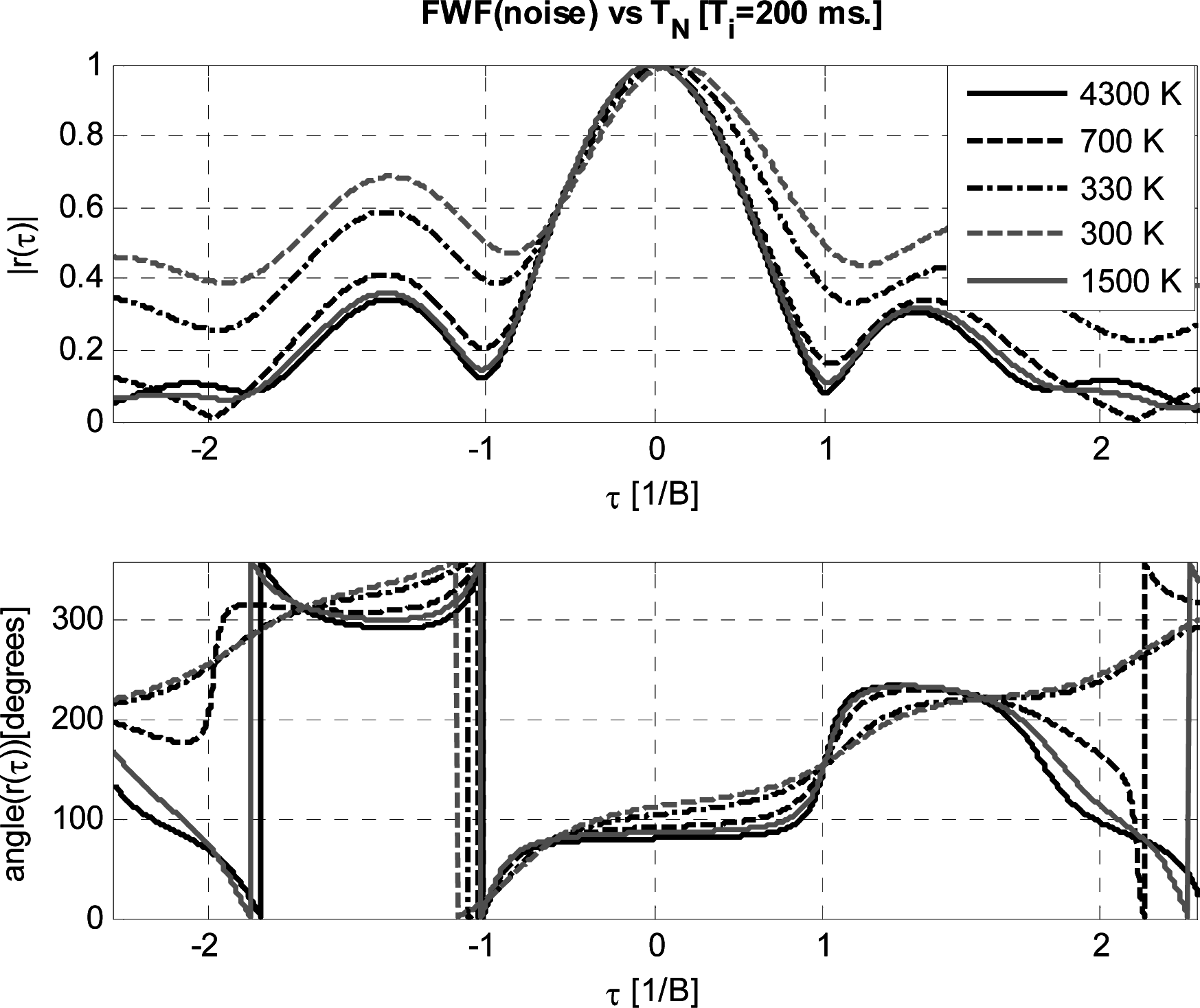
In order to have a reference,
Figure 3 shows the results of the
FWF(noise) implemented with block diagram presented in
Figure 1a with the switch in position 1, as a function of the input noise temperature
TN. As
TN approaches the physical temperature, the shape of the
FWF degrades, since the noise introduced by the resistor in the Wilkinson power splitter, used to inject the noise to the two receiver chains, becomes comparable to the one injected (
TN) and it is 180° out-of-phase in each branch-, leading to a zero cross-correlation. At too high
TN the receiver saturates and clips the signal. The best results are obtained for
TN /
TR ranging between 2.7 and 16.7, and a value of 6 (
TN = 1500 K) has been selected for all subsequent tests. Once the reference
FWF has been determined, it is possible to analyze the
FWF dependence on the three main parameters:
SR, signal-to-noise ratio
SNR =
Pin/kB·
TR·
B (≡
TPRN/TR, if
B =
BPRN) with
kB·
TR·
B = −110 dBm
, and the number of bits.
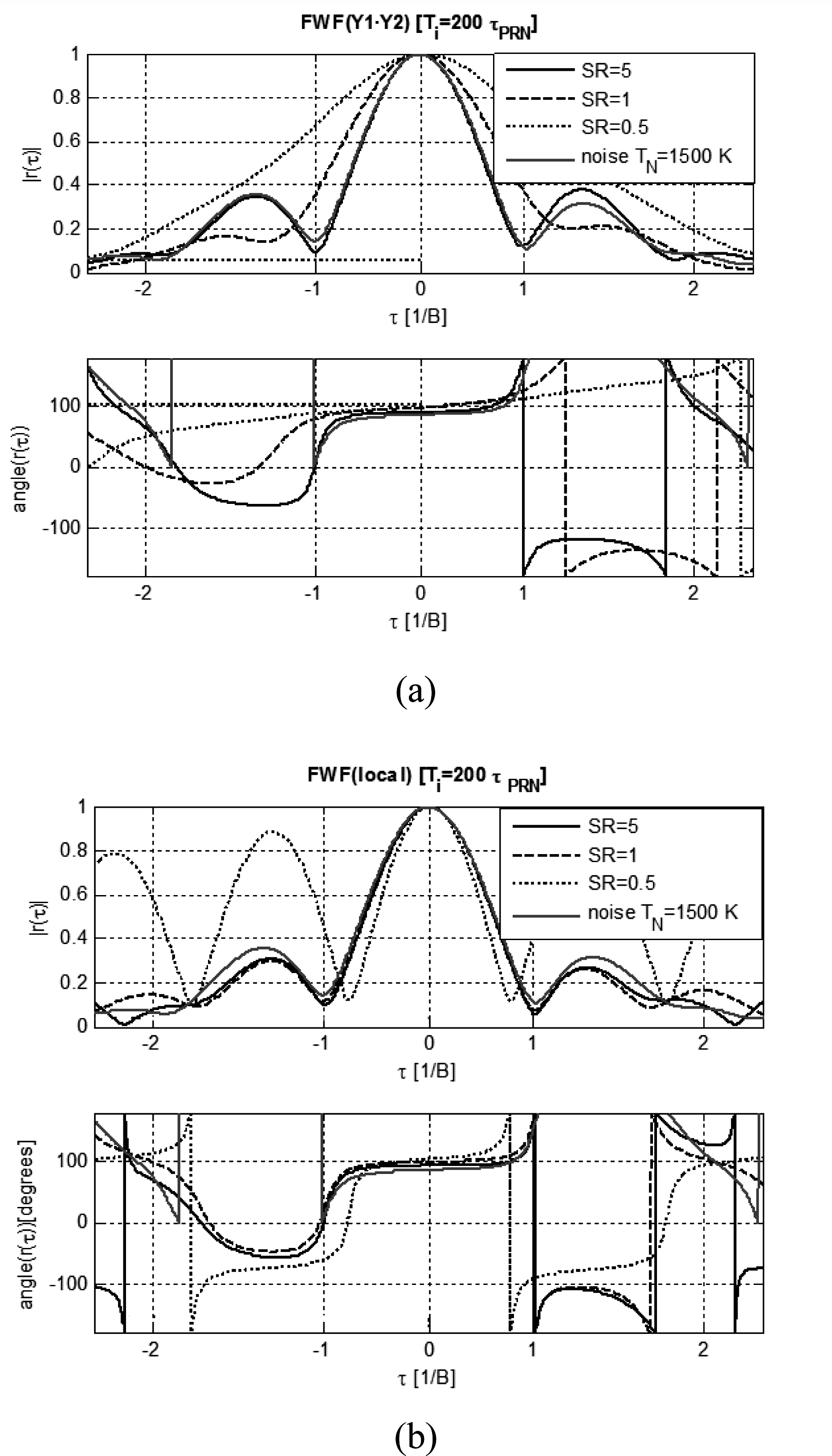
FWF dependence on SR: To determine the optimum
SR value a sweep has been performed for both
FWF(Y1·Y2)] and (
FWF(local) methods. Their performance has been analyzed and compared to the reference
FWF(noise) (
Figures 4a and
4b). It is found that for the
FWF(local) method
SR ≥ 1 is required to obtain a satisfactory
FWF. The amplitude error does not improve significantly for
SR > 1, but the phase error does, saturating above
SR = 5. Slightly worse errors are obtained with the first method (
FWF(Y1·Y2)] and higher
SR values are required to obtain comparable residual error.
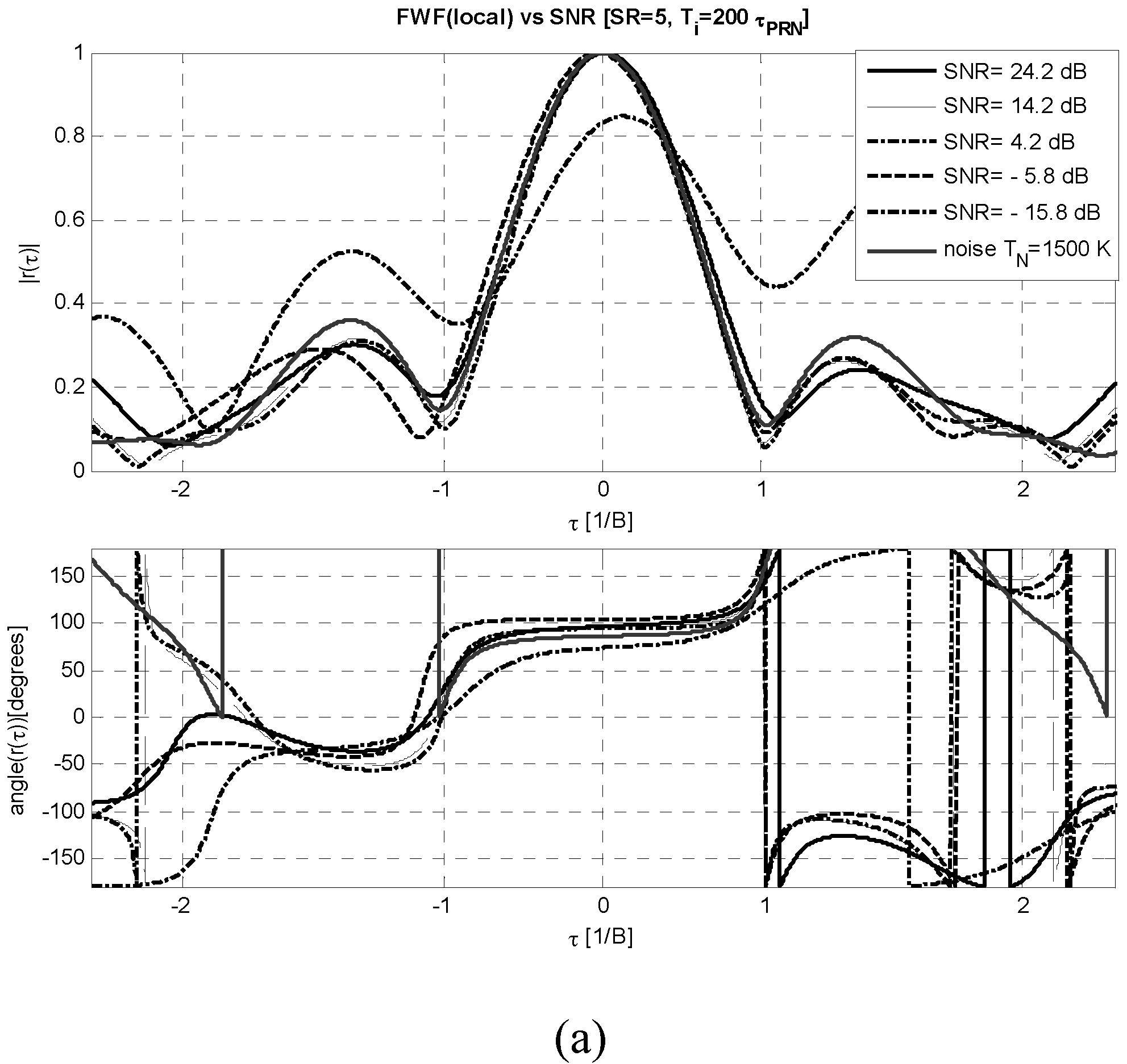
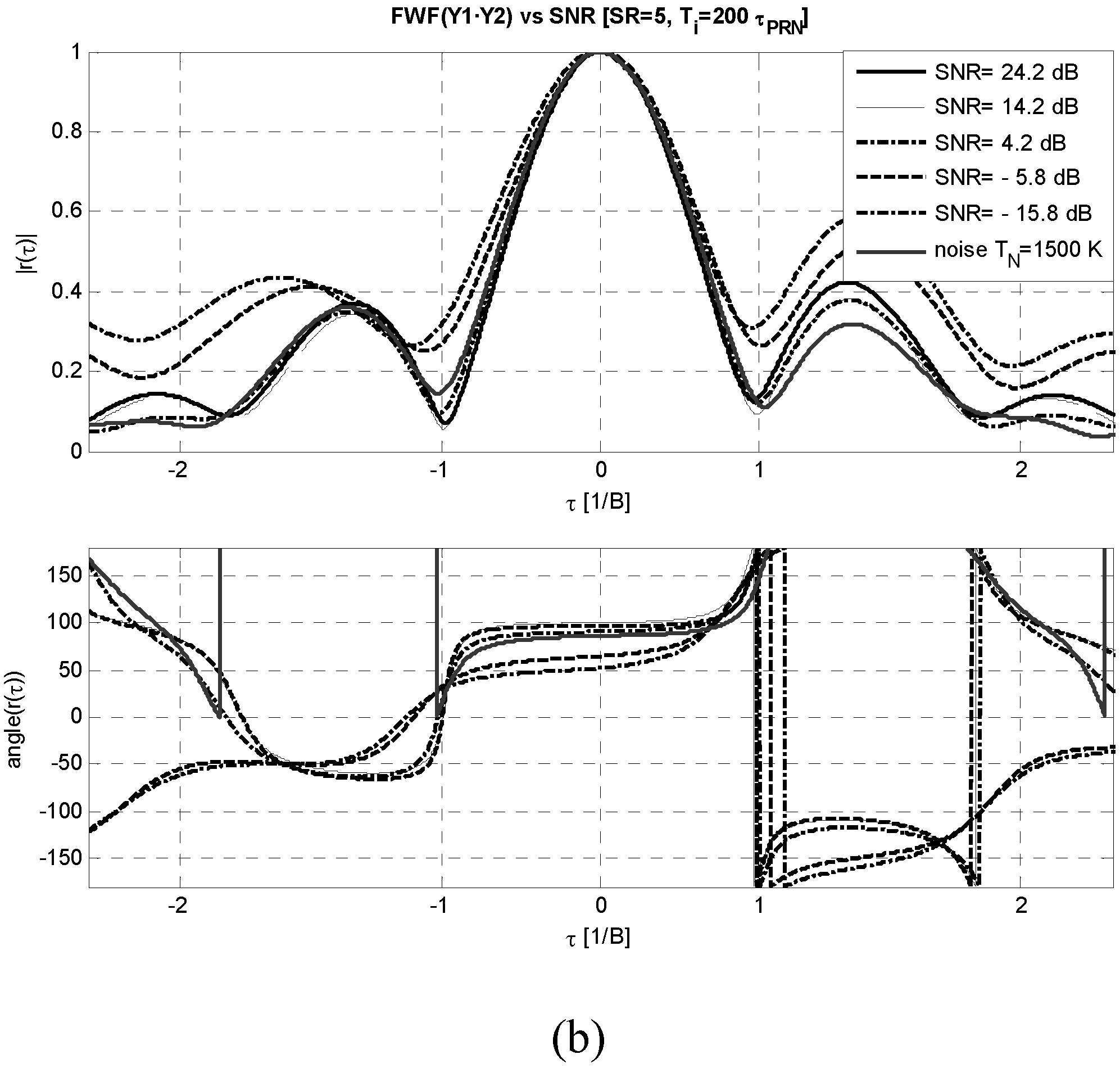
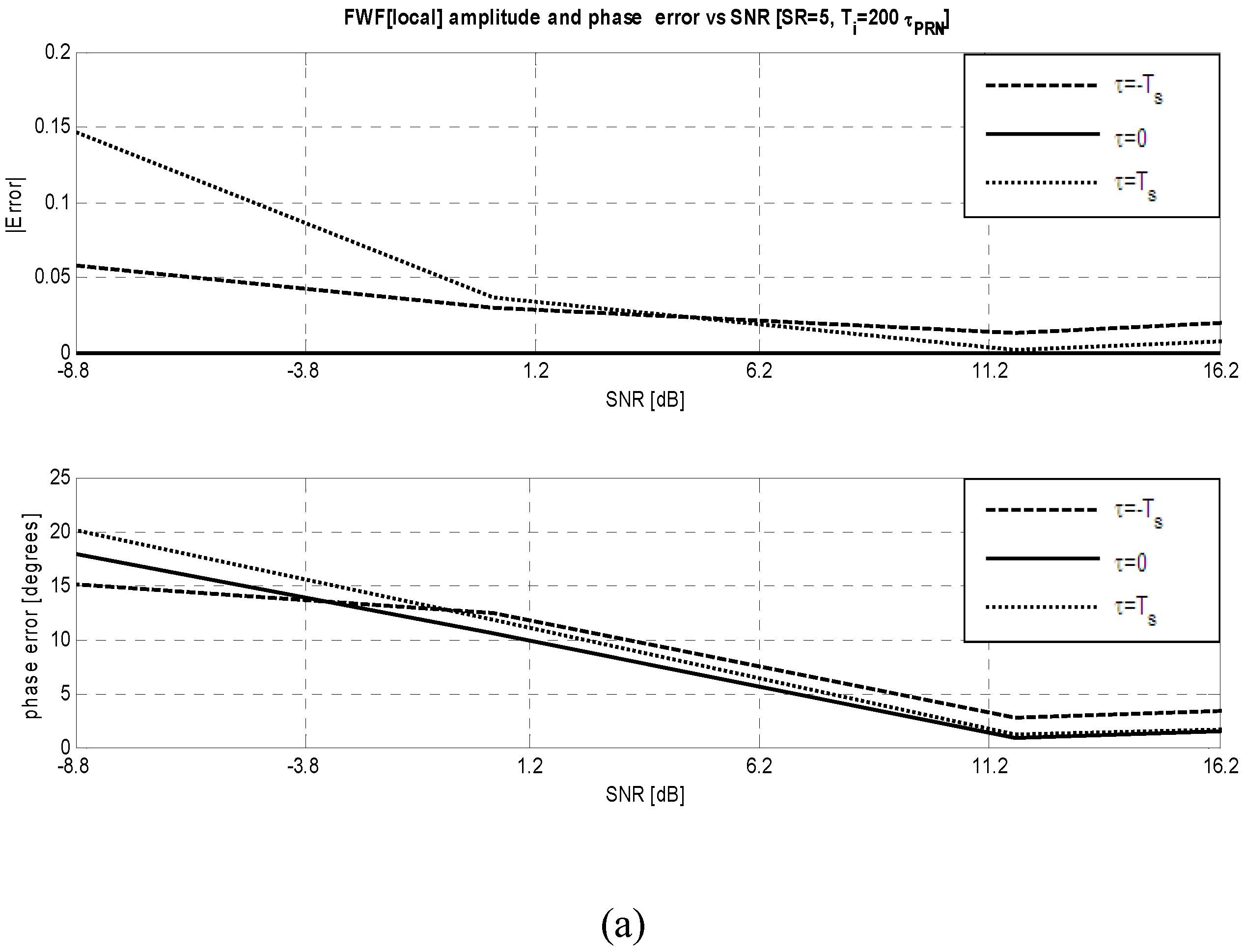
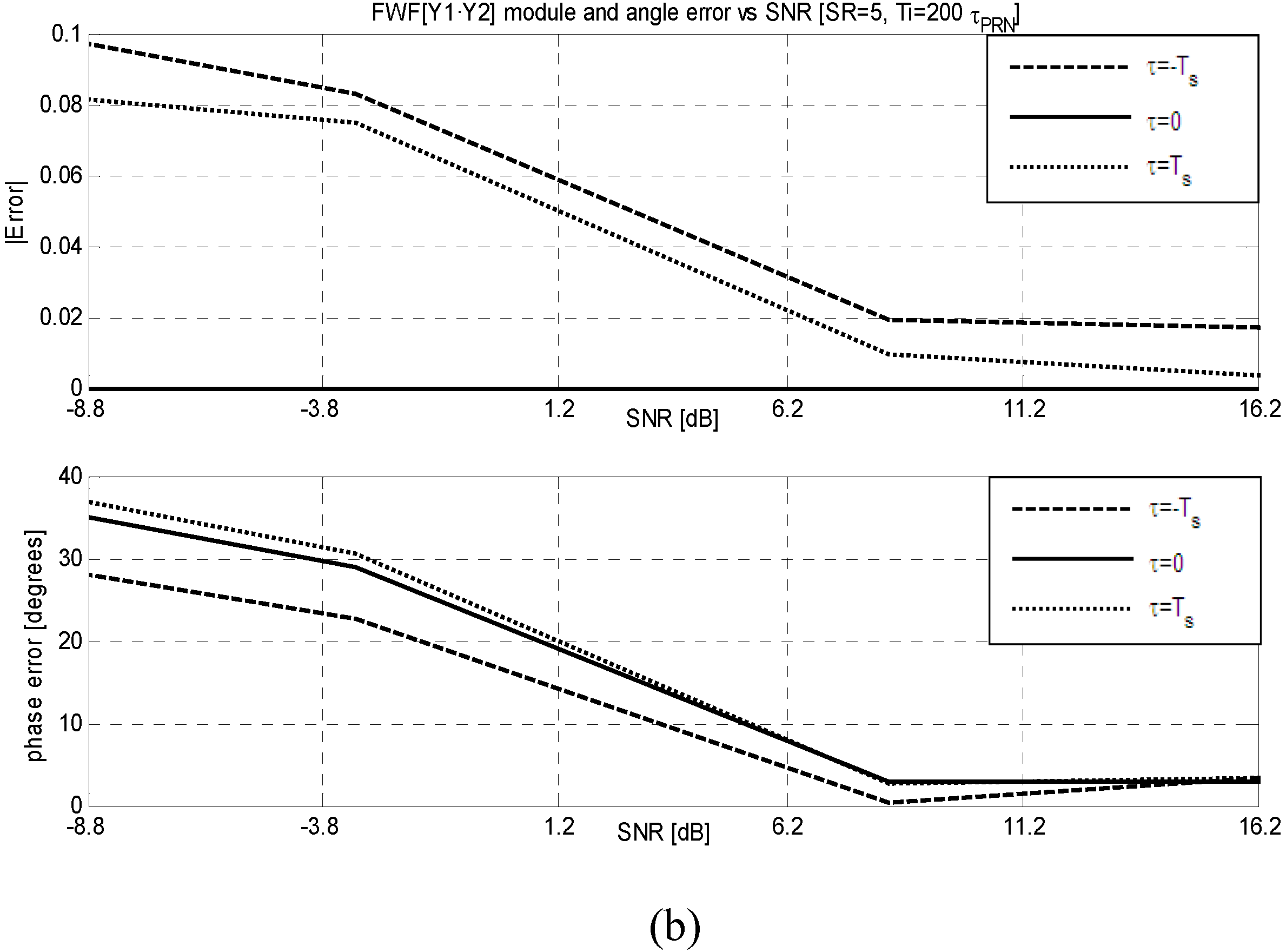
FWF dependence on the signal input power: To determine the optimum power at receivers’ input, the input power has been swept while keeping
SR = 5 and
Ti = 200·
τPRN. Except at the lowest input power, the
FWF(local) method out performs the
FWF(Y1·Y2) one (
Figures 5a and
5b). Since the thermal noise present in the
PRN signal being injected and the noise generated by the resistor of the Wilkinson power splitter, in fact, are completely uncorrelated with the local
PRN sequence. In this case to retrieve the
FWF(local) it is necessary at least that
SNR ≥ +1 dB (
Figure 5a) and optimum values (amplitude error < 2% and phase error < 5° at
τ = ±
TS) are obtained for
SNR ≥ +11 dB (
Figure 6a). For low input powers (
SNR ≥ −9 dB) the amplitude errors using the
FWF(Y1·Y2) method are smaller than using the
FWF(local) one, while phase errors are twice higher. When the input power increases both methods provide similar results (
Figure 6a and
6b).
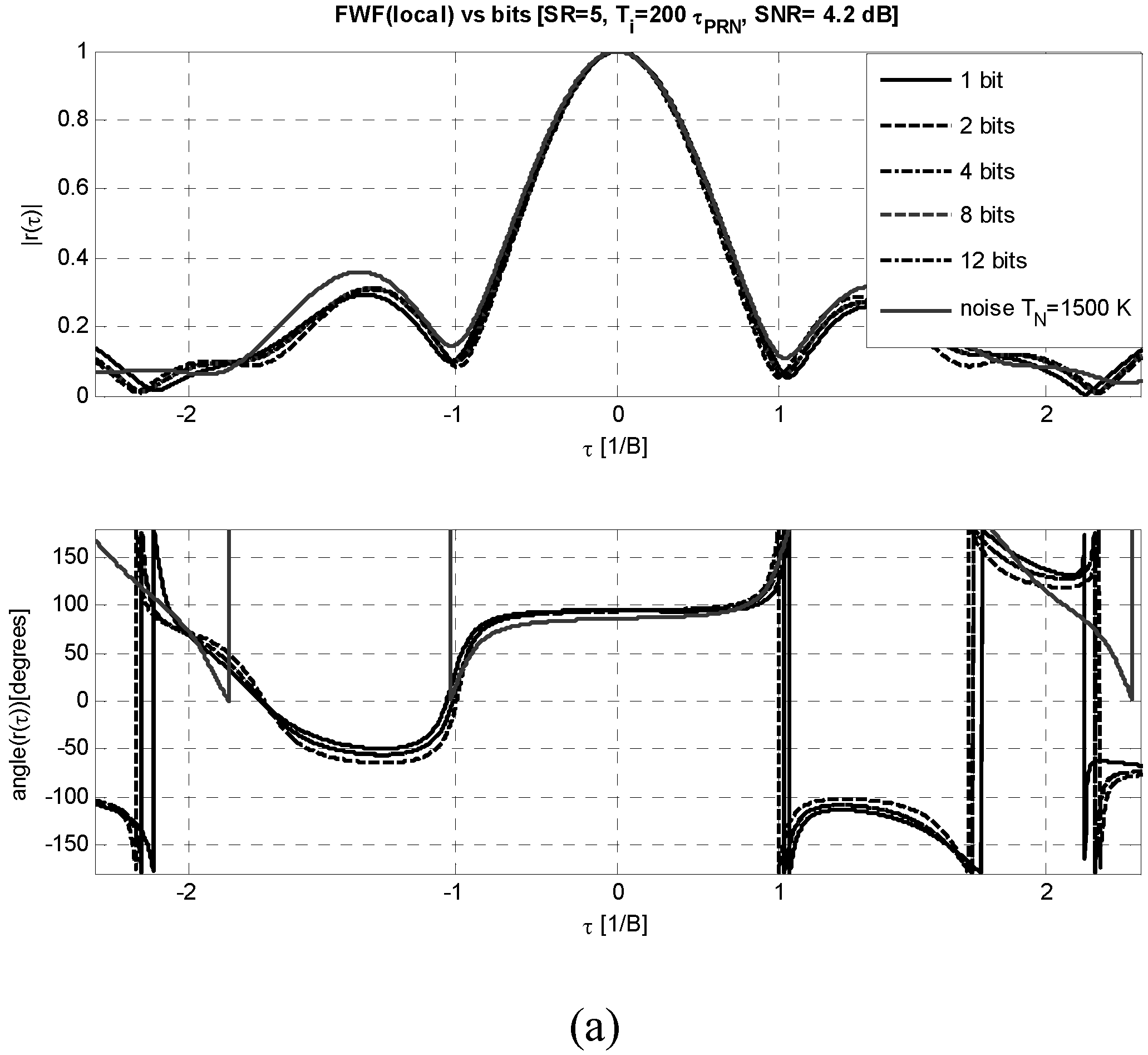
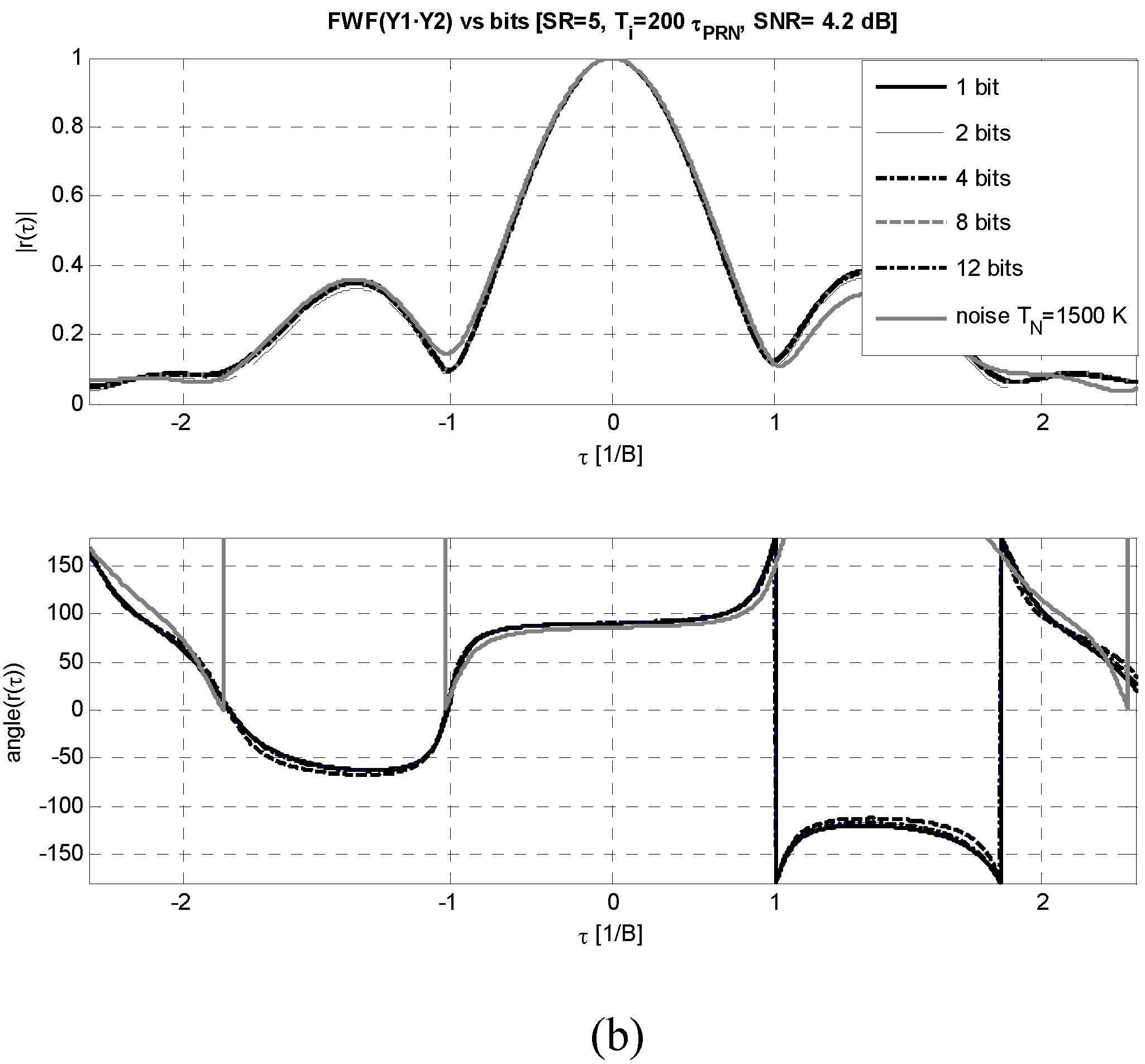
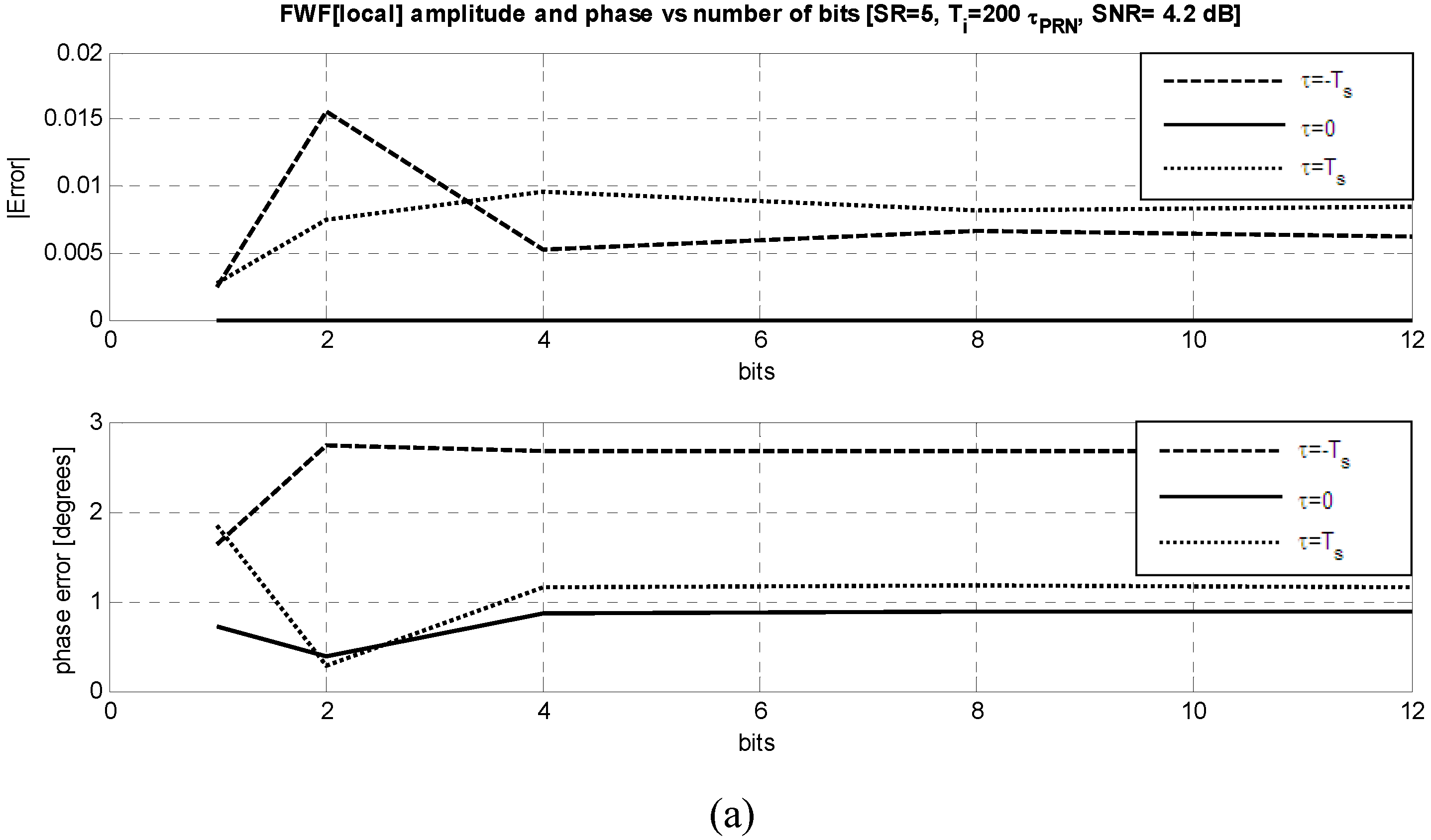
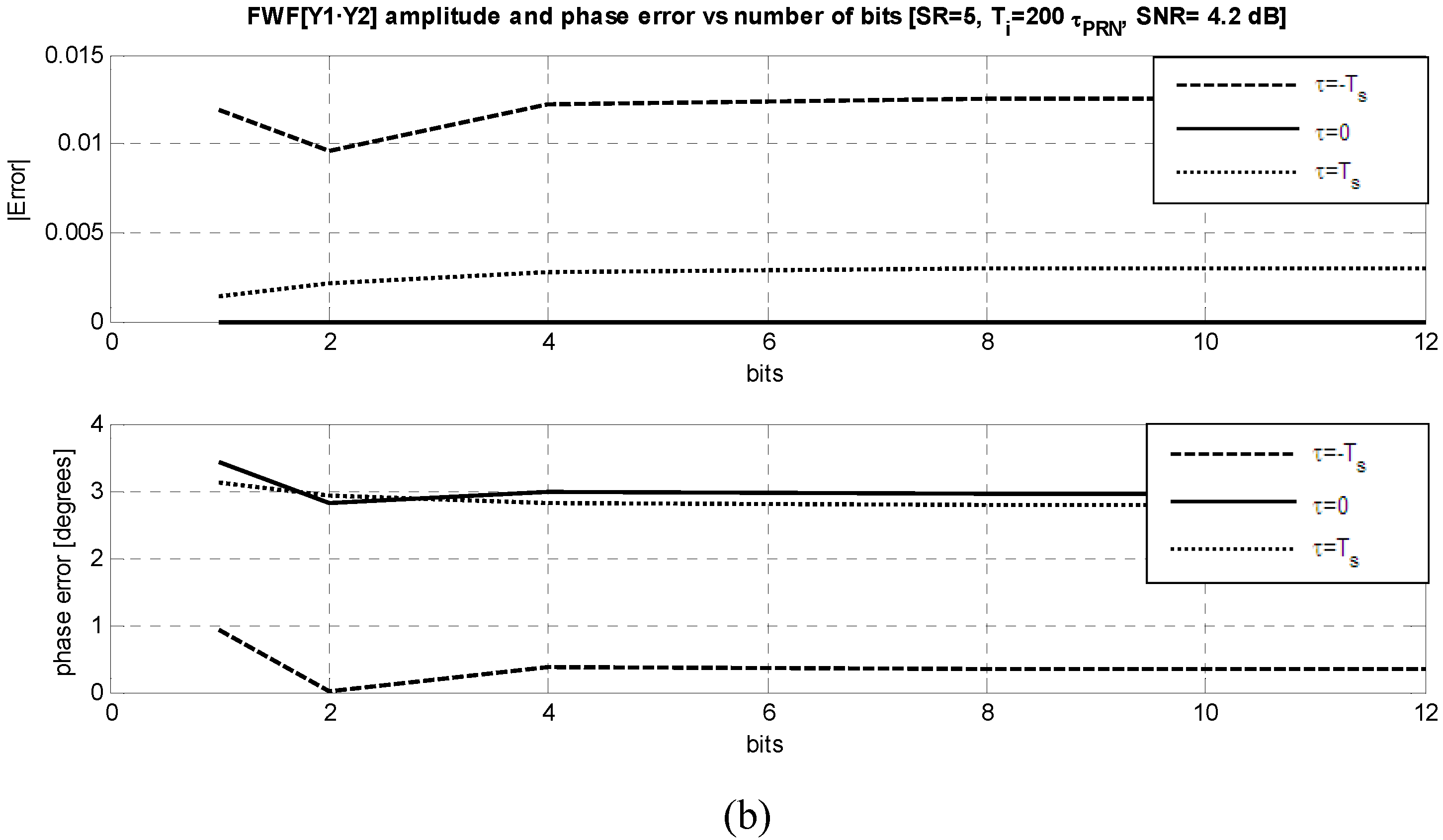
FWF dependence on the number of bits: Figures 7a and
7b show the dependence of the estimated
FWF as a function of the number of bits used to digitize the output signals from 1 to 12, while other parameters have been set to their optimum values:
SNR ≥ +11 dB,
SR = 5 and
Ti = 200·
τPRN. As it can be appreciated, as in other systems [
18–
20] there is a negligible variation with the number of bits above 4 bits for both methods, and very good performance is achieved even with just 1 bit. As it can be noticed, the residual errors especially for the phase, are much smaller with the
FWF(local) method (
Figure 8a), than with the
FWF(Y1·Y2) one (
Figure 8b).
As a summary, PRN signals can be successfully used to calibrate correlation radiometers. The best performance is achieved for Ti at least 200·τPRN, when the PRN signal bandwidth is about a factor 5 larger than the receiver’s bandwidth (SR ≥ 5) and the SNR ≥ +11 dB, even when one bit correlators are used. The optimum values using 1bit/2 level correlators, SR = 5, SNR = 4.2 dB and Ti = 200 ms are: amplitude error < 0.25% at τ = 0, ± Ts, and phase error<1° at τ = 0 and <2° at τ = ± Ts.
4. Considerations for the Implementation of a Calibration System for Large Aperture Synthesis Interferometric Radiometers
When dealing with the distribution of common
PRN sequences to all receivers in a large aperture synthesis interferometric radiometer such as
MIRAS in
SMOS,
GeoSTAR,
GAS, etc. a number of different techniques can be devised:
Generation of the
PRN signal in a central point and radio frequency (
RF) distribution. In this case a distribution network similar to the current noise injection network would be required [
4], or
Generation of the PRN signal in a central point and optical distribution to each receiver using an optical fibre distribution network, or
Generation of the PRN signal in a central point and baseband distribute it to all receivers. In this case an up-converter is needed at each receiver input, being all phase-locked to a common reference, or
Generation of the PRN signal at each receiver input. In this case, up-conversion, phase-locking and synchronism are required.
From the above four potential implementations, only the second one (centralized distribution using optical fibres), may provide a significant improvement over the current noise distribution system in terms of mass, volume and power while, at the same time, since all receivers will be driven with the same signal, it will provide a complete baseline calibration. It has to be noticed that the mass reduction associated with fibre distribution can be an enabling factor for future missions with higher number of receivers installed in a folding antenna.
For example, the current implementation of the SMOS mission includes the concept of optical signal distribution (MOHA: MIRAS Optical HArness), but it is limited to the distribution of digital signals of 122 Mbps between the receivers and the main data processor. The proposed alternative would complement this system with the optical distribution of the analog PRN signal as well. Three different alternatives could be envisaged:
With a different optical fibre than the one used in MOHA to send the sampled data to the correlator matrix located in the hub (#1),
With the same optical fibre used to send the sampled data to the correlator matrix located in the hub, using two different optical wavelengths (#2), or
Same as #2, but using the same optical wavelength and using optical directional couplers (#3).
Both options #2 and #3 need to add extra devices (Wavelength Division Multiplexers and optical splitters) that should be conveniently packaged to survive in space environment. These devices increase the mass and insertion losses of the distribution network, reducing the benefits of optical distribution. Option #1 needs the inclusion of a new optical fibre but as the lengths considered in satellite distribution systems are small the mass of the additional elements in #2 and #3 is higher than the corresponding to the extra fibre introduced in #1, being this option the optimum in terms of losses, mass, and reliability when compared to the other options.
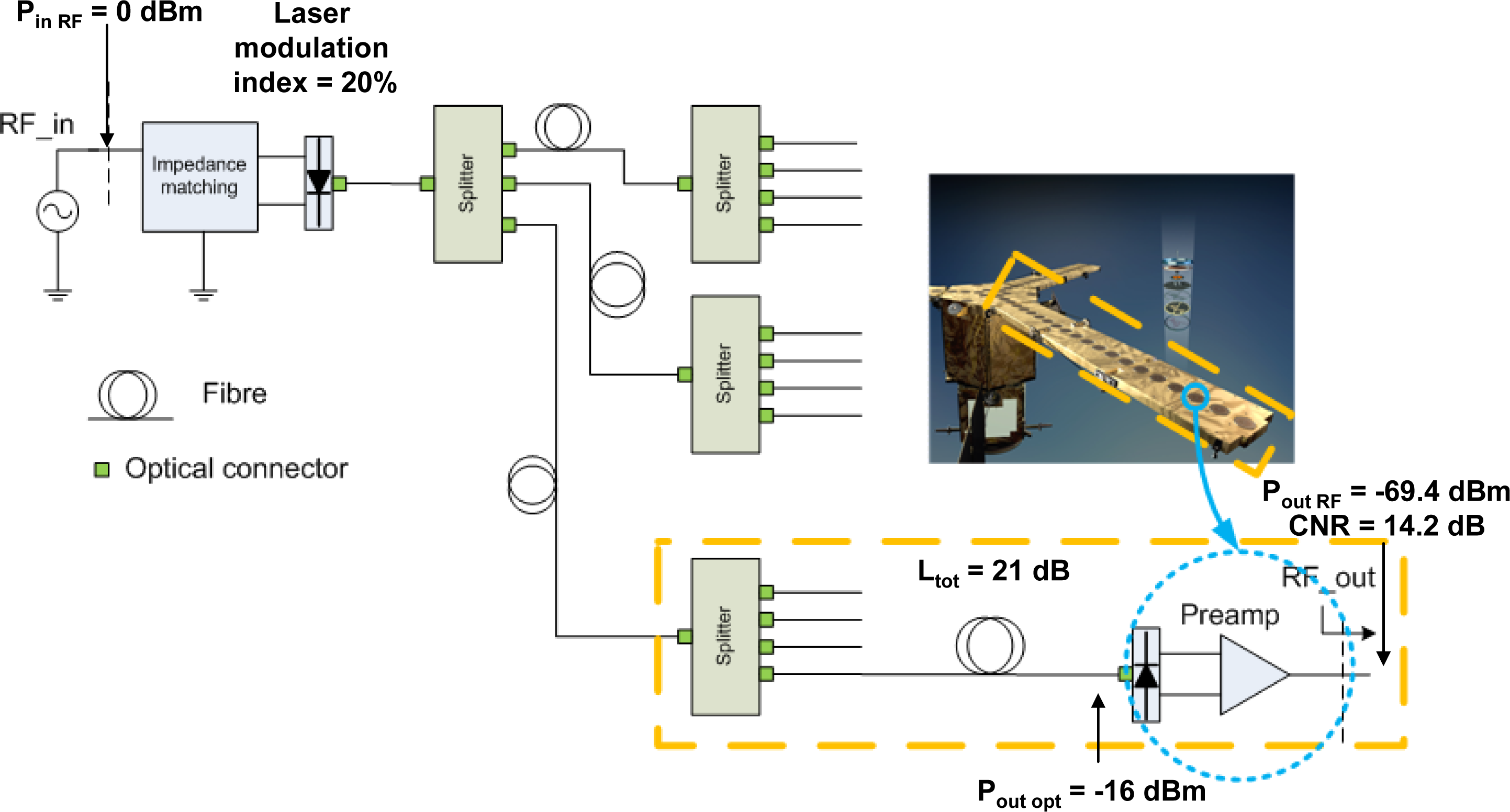
Figure 9 shows a proposed
PRN-based centralized calibration system based on option #1 [
21]. The
PRN signal is up-converted to the receivers’ central frequency
f0 by directly modulating a laser, whose optical output is split to drive all the receivers. Then, at each receiver’s input, a photodiode detects the optical signals and converts it directly into an
RF signal that is pre-amplified and injected in the receivers input where “correlated noise” is injected.
Optical signal distribution can find applications in satellite systems due to the possibility of mass savings that can be an enabling factor in some systems, especially in those with foldable antennas or high number of RF interconnects. Without loss of generality, the benefits of optical distribution of signals inside a satellite will be explored using the example of the system presented in this work, considering the optical distribution of the PRN signal to the receivers in the arms of the satellite.
For the particular case of
MIRAS/
SMOS the main parameters for the calculations are
B∼22 MHz and
f0 = 1.413 MHz and, since
SR ≥ 5, the bandwidth of the
PRN sequence must be larger than 110 MHz. In
MIRAS/
SMOS the total number of receivers is 69, but the
SMOS follow-on missions may have even more. Therefore, to analyze the performance of this technique, without loss of generality, it is assumed that the total number of receivers is 100. Based on the results of [
22], a preliminary design of the calibration system has been performed.
For the optical link shown in
Figure 9, the link gain for a 100 element distribution with resistive impedance matching at the laser [
23] is:
where
R is the photodiode’s responsivity,
η the laser’s emission efficiency (W/A),
GLNA the voltage gain of the receiver’s pre-amplifier, and
L the optical distribution losses.
For simulation purposes, a medium power Distributed FeedBack (DFB) laser from Modulight, the same manufacturer as for the lasers used in MOHA, has been assumed in this example. It operates in the 1,550 nm wavelength and presents an efficiency of < 0.15W/A, with an output optical power <7 mW within the operational temperature range (from −20 °C to +85 °C). If a resistive impedance matching between the RF source (Pin = 0 dBm) and the laser is used, and the distribution optical losses for 100 receivers (including connectors) are 21 dB, for an average emitted optical power of 3.75 dBm (and 40% modulation index to minimize harmonic distortion).
Since in the
SMOS case, to neglect clipping effects, the maximum input power at receivers’ input is −83 dBm, the noise level is about −100 dBm, and the optimum
SNR ≈ 11 dB, the calibration signal must be (P
ant RF = −69.4 dBm
Figure 9) attenuated by ∼20 dB at the input of each receiver. With this approach the additional noise due to the optical distribution of the signals is kept below the receiver’s noise and thus does not degrade the system’s performance.
Regarding to the mass savings due to photonic distribution of the
PRN signals, it has been assumed that a cable connects each antenna element in the arms with the body of the satellite, that is, a total number of 18 antennas x 3 arms = 54 links with a link length of roughly 2.2 m (distribution from arm center, see
Figure 9 where arm length is 4 m plus 10% margin for cable deployment). Given these assumptions, the total mass for a copper distribution using Sub Miniature version A (
SMA) connectors (3.8 g/unit) and 3 mm coaxial cable (26 g/m) is 3.5 kg, whereas optical distribution using miniature optical connectors (1.12 g/unit) and 1.2 mm simplex optical spaceflight cable (2.5 g/m) is 420 g, which results in more than 3 kg reduction (85%) in harness’ mass.
5. Conclusions
Correlation radiometers require the injection of known calibration signals. Currently these signals are generated by one or several noise sources and are distributed by a network of power splitters, which is bulky, difficult to equalize, and introduces additional noise. Aiming at alleviating these problems a new technique is presented. It consists of the centralized injection to all receivers of a deterministic PRN signal, providing complete baseline calibration. PRN signal exhibits a flat spectrum over the receivers’ bandwidth, which makes possible to use those for calibration purposes instead of the usual thermal noise. Since the PRN signals are deterministic and known, new calibration approaches are feasible:
1) through the correlation of the output signals at different time lags, as it is usually done when noise is injected, but allowing a much easier distribution of the signal to all the receivers simultaneously, or
2) through the correlation of the output signals with a local replica of the PRN signal, leading to the estimation of the receivers’ frequency responses and of the Fringe-Wash Function. In this last case the distribution network has no influence on the correlation coefficient, adding correlated noise.
This technique has been verified experimentally to assess its performance and the optimum parameters to be used. Excellent performance has been demonstrated by comparing the Fringe-Wash Function (
FWF) shape, and the amplitude and phase values at
τ = 0, ±
Ts to the ones obtained using the injection of two levels of correlated noise [
4]. The optimum parameters are: integration time at least 200 times the length of the sequence (
τPRN),
PRN bandwidth larger than 5 times the receiver’s bandwidth (
SR ≥ 5), and the
SNR =
Pin/KBTRB ≥ 11 dB. The number of bits used turned out to only slightly affect the results and even if one-bit correlators are used, negligible system performance degradation has been noticed. The optimum values are: amplitude error < 0.25 % at
τ = 0, ±
Ts, and phase error < 1° at
τ = 0 and < 2° at
τ = ±
Ts. Increasing the integration time above 200 ms will reduces the effect of receivers’ noise in these estimates.
A preliminary design of the centralized distribution of PRN signals for very large aperture synthesis radiometers is presented using an optical fibre network. From the different possible topologies studied, the simplest and lightest uses an additional optical fibre to distribute the PRN signals.

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













