One of the goals of this paper is to validate the utility of WSN for improving elite rowing performance. Nowadays this goal is achieved by subjective observations of the trainer, who corrects the movement of the rowers from a neighboring boat. However this observations are subjective and many times imprecise. More sophisticated techniques in this field include bulky wired systems, they are usually very expensive, heavy, power hungry and difficult to install.
4.1. Remote Analysis
Prior to the installation of the system to a boat, a test phase was carried out in which we characterized sensors output. The analog outputs from the used accelerometers are called ratiometric, meaning that they output a voltage proportional to the acceleration seen. For example, when using a 12-bit ADC, where the output values range between 0 and 4096, a 0g reading should correspond to a sampled value of 2048, exactly in the middle of the range. However, in reality, this is not the case, as process variation and other factors making the 0 g position to be different for all sensors. Also, the amount of voltage change for a given change in sensed acceleration is not constant for all sensors. In order to fully characterize our sensors, we performed a 0 calibration to each sensor following a method which involved rotating the accelerometer 180 degrees about the axis perpendicular to the desired axis of calibration and taking the highest and lowest readings the 0 g acceleration (
B̂) and the sensitivity (
Â) were determined for each axis of each sensor using
Equation 1:
Moreover, accelerometer readings measure the force, per unit mass, acting on the body along a specific sensing direction. This force vector is also known as the specific force
F̂. The vector sum of this force and the gravity
ĝ, per unit mass is the inertial acceleration of the body. That is:
In order to subtract the specific force,
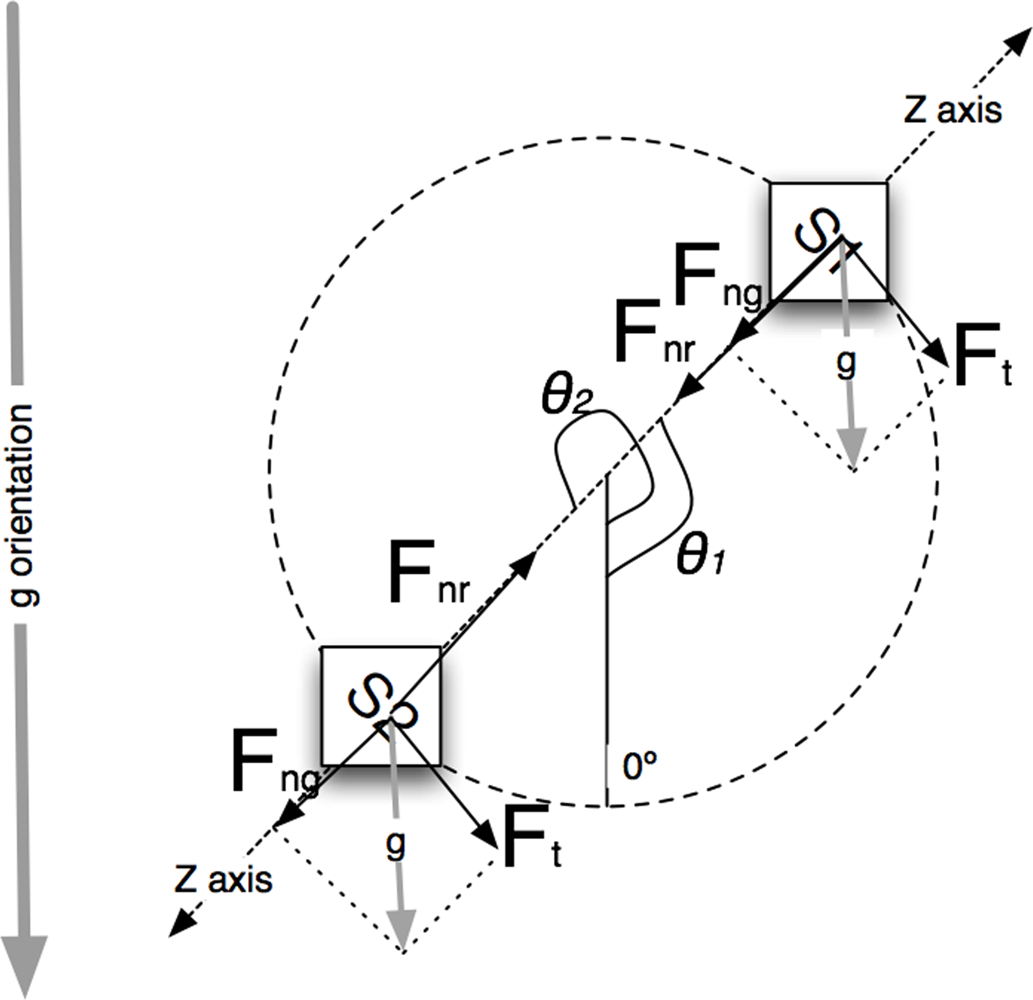
F̂ from the acceleration readings we took advantage of the geometrical configuration of the sensors. For each axis we could subtract gravity effects considering that:
Where
âsi is the accelerometer reading,
F̂ is the desired specific acceleration,
ĝ corresponds to the gravity component and
θi is the inclination angle respect the vertical (
Figure 5) and that the two sensors S1 and S2 present complimentary orientations:
Combining
Equations 3 and
4 We obtain for the specific acceleration:
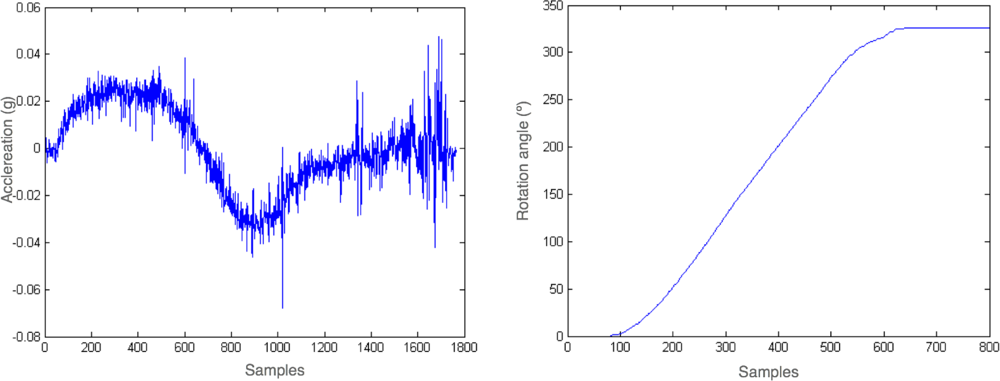
To proof the validity of this equation, we tested the performance of the system to obtain pure rotations. Specifically, the accelerometers were installed in a cylindrical tube which was rotated 360 degrees. In
Figure 6 the accelerometers readings and the extracted rotation angle for this experiment are presented (
Equation 6).
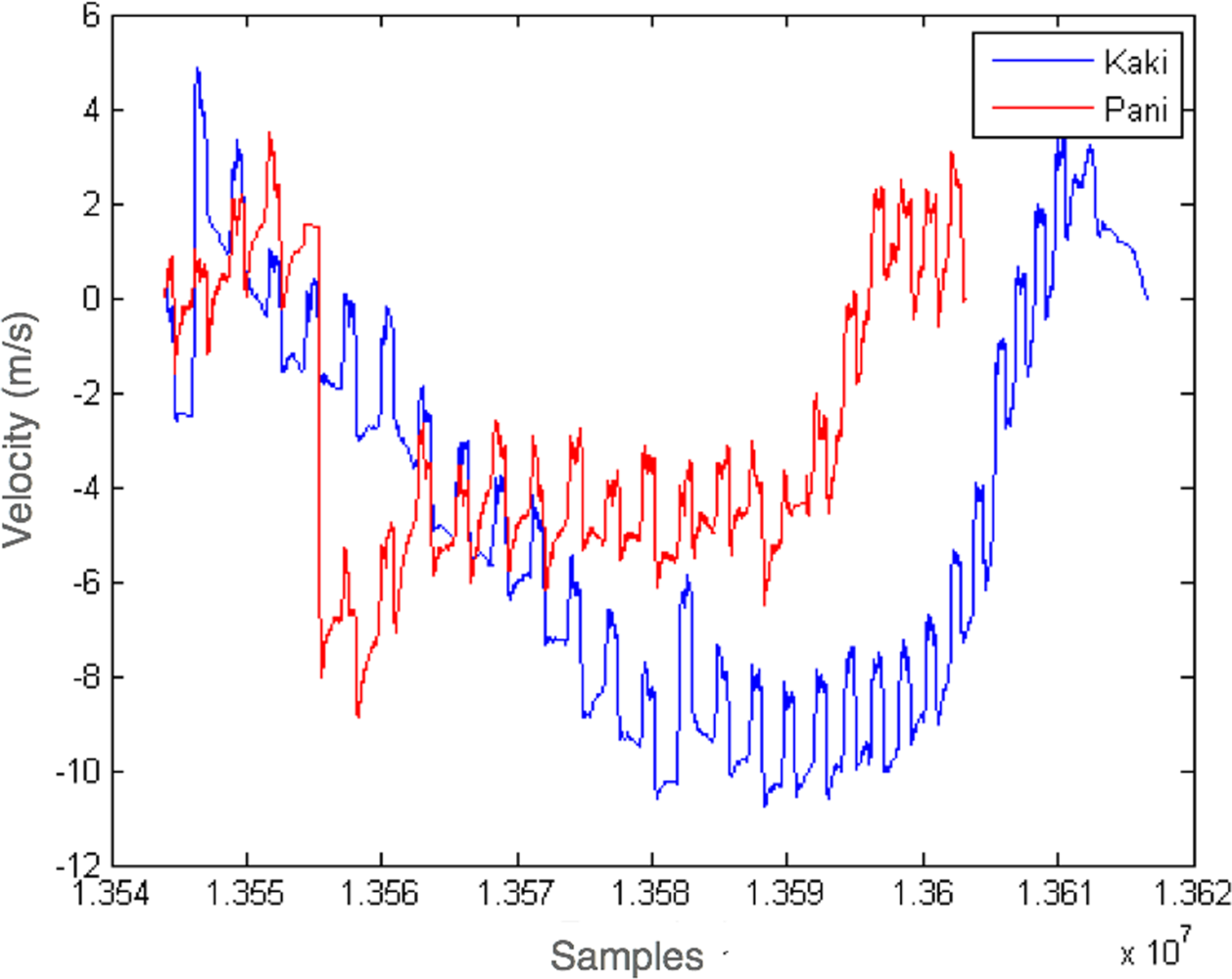
To verify the performance of the entire system, two additional experiments were carried out. In the first approach, for simplicity, we monitored two athletes in a ergometer workout, the later helped to produce the first “rowing-related” sets of results. Specifically, we were interested in monitoring the forces exerted by the two rowers. The main objective was to track the movements of each handle bar and check the time synchronization between rower strokes during the workout. Three telosb equipped with the sensor board presented above were used in the experiment. Two of them were installed in the handlebar of the ergometer. The Z axis was oriented parallel to the pulling direction. The third one was used as a base station, the timestamped data was recollected from the accelerometers at 83 Hz. In
Figure 7 the integrated acceleration readings show the velocity measurements of the two sportsman. The local maxima of each timeseries represents a stroke. The observed drift is attributed to the accumulation of errors highlighted by the numerical integration process.
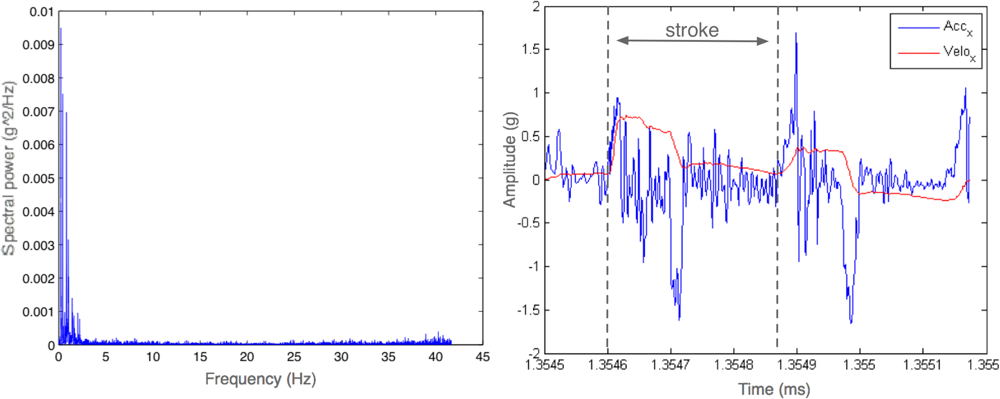
All time series were corrected for instrument response and offset. A spectral analysis of the ergometer data (
Figure 8, right) was performed to check the dominant frequencies of the signal. After spectral analysis, the signal were low pass filtered. Specifically, we used a fourth order Butterworth filter with a cutoff frequency of 10 Hz. High frequency background noise were eliminated of the signal. The power spectra of the accelerations registered in Z direction for both ergometers are represented in
Figure 8, left.
As observed in
Figure 8, the dominant frequencies remain below 5 Hz. The frequency corresponding to the maximum of the spectra is observed at 0.5 Hz. This value can be attributed to the mean cadency of the rower which corresponds, in that case to 30 strokes/minute. These results indicate that time/frequency analysis could be a useful tool rowers cadency evolution monitoring. In
Figure 8 (right) the acceleration and the velocity time series of two strokes is presented.
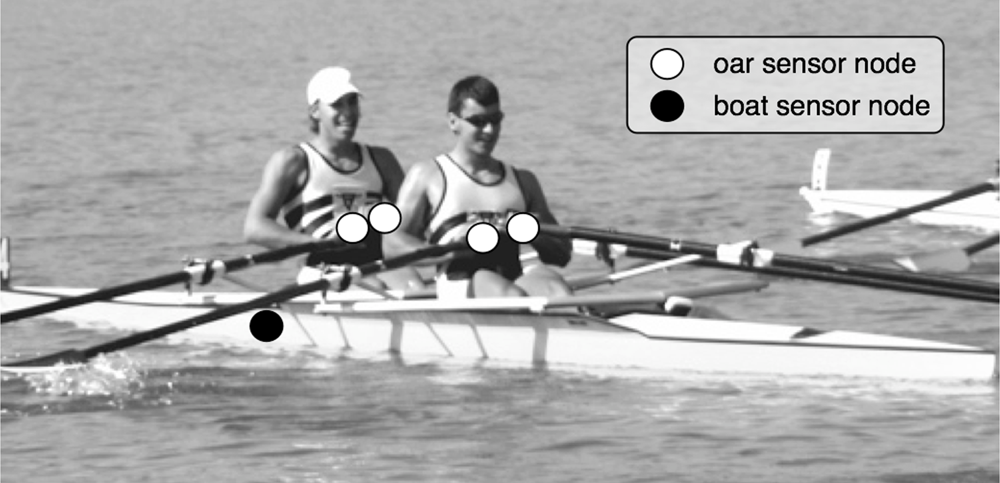
Once the performance of the system in ergometer is proven, the sensors were installed in a boat. Two accelerometers were used in each oar as presented in
Figure 4. These sensors were mounted at the end of the oar with X axis pointing towards boat movement direction when the oar was perpendicular to the water and Y axis pointing directly up out of the boat when the oar was perpendicular to the water. The boat sensor was mounted on the hull of the boat to register boat motion.
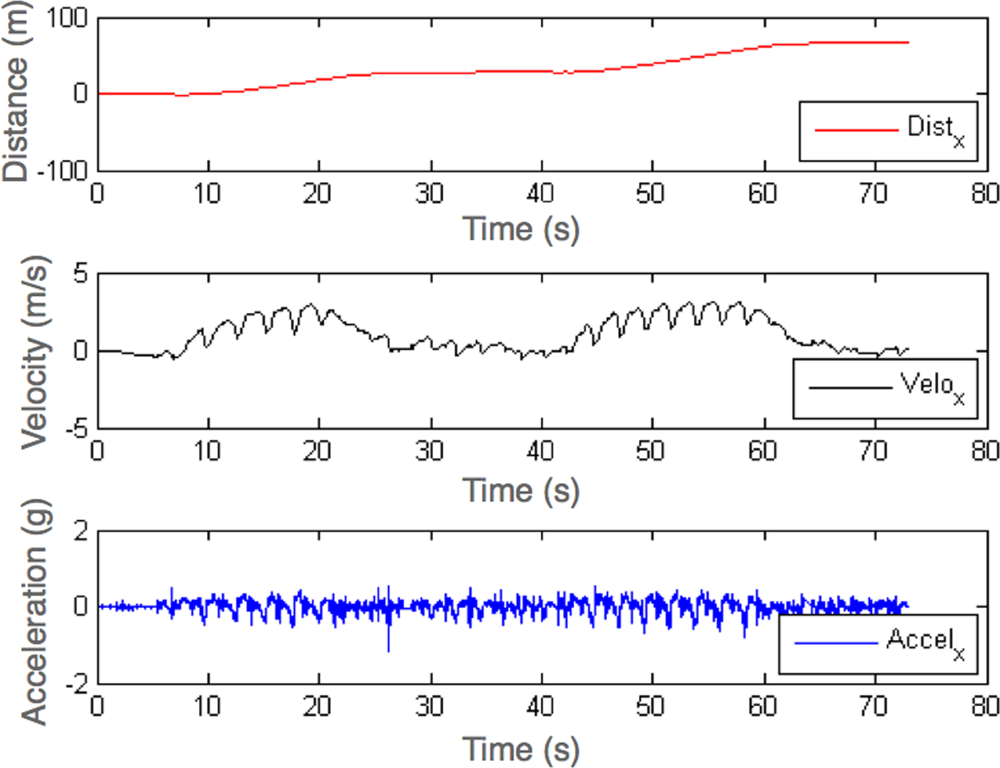
A series of experiments were performed with this setup. In
Figure 9 the motion of the boat during 80 seconds of exercise is presented. The velocity and position were obtained by integration of the acceleration readings. The exercise consisted in going and returning along 40 meters stretch. In
Figure 9 middle, the velocity profile evidences the three stages that corresponds to go, turn, and go back. Moreover the ripple observed in the velocity profile shows the effects of the strokes. In
Figure 9 top, the boat covered distance is presented.
REMOTE system also permits the study of boat balancing, which is a very important parameter that reflects rower’s technique. In
Figure 10 the boat balancing obtained form the boat sensors acceleration readings is presented. On the inset, a scheme of the hypothetical boat tilt is presented showing the associated angles.
One of the most important parameters to quantify rowers technique is the stroke angle.
Figure 11 (left) show the optimal angles of a stroke (A = 55°, B = 35°). REMOTE system uses the sensors placed at the oars to obtain those angles. In
Figure 11 (right) the stroke angles from two rowers during three strokes are presented. For that experiment, two rowers with different experience where selected. Whereas red (Miquel) was a experienced rower and presents a depured technique, beeing his strokes angles close to the optimal angles, blue (Aleix) lacks of depured technique.
The technique and strength of the rower is compared to the performance of the boat. In
Figure 12 (right) rowers oar acceleration, boat acceleration, and boat velocity during three strokes are presented. In
Figure 12 (left) the typical and optimum evolution of the oar acceleration are shown. Oar acceleration (
Figure 12, right, blue line) resembles the typical profile presented in
Figure 12, top, left. Consequently, the trend of the oar acceleration could be used to quantify the technique of the rower.
In our test we also compared the velocity evolution of two rowers.
Figure 13 presents two sportsmen rowing on the same boat reproducing the same go/go back experiment presented above. Note, that the velocity of the boat is also depicted in a blue line. In the
Figure 13, 5 stages are clearly evidenced. Where stages 1 and 4 corresponds to covering the stretch, and 2, 3 and 5 corresponds to stopping and turning stages. In stages 1 and 4, the synchronization among the two rowers could be appreciated (note the dotted lines). The higher velocity of Miquel (red line) is attributed to its higher stroke angle as we observed in
Figure 11.
Finally, the system also permits the study of stroke trajectory. In
Figure 14 the trajectory of a single stroke is presented next to the theoretical trajectory. REMOTE provides a good tool to quantify rower techniques. We attribute the observed deviation to mechanical construction of the hand made packaging, unknown original position of the oar, and numerical integration errors.
4.2. Remote and RowX Comparison
After comparing the obtained data with the theoretical expected, a feature comparison with RowX is also presented. RowX software provides data form the sensors that are placed around the boat. Thanks to those sensors, RowX is capable of providing the acceleration of the boat in vertical and advancing direction, angles of the oars, speed of the boat, force applied at each oar, and the heart rate. As we have seen REMOTE is capable of obtaining a set of data including most of the RowX data. REMOTE directly provides acceleration of the boat and each oar in the six degrees. This allows us to deduce many types of data, including the data provided by RowX system and other information like the balancing of the boat (
Figure 10) and the trajectory of the stroke (
Figure 14).
The trajectory of the stroke is the most valuable of the data since it can be used to quantify the rowing technique of the sportsman. Pattern matching algorithms could be applied to evaluate different aspects of the stroke. This could provide information of how the technique changes under different aspects, like stress, tiredness, or even over the time or a certain period of specific training.
The heart rate is not obtained because REMOTE is not equipped with a heart rate sensor. The reason was that we wanted to place all the components inside the oar, but a standard external heart rate sensor could be easily added.

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













