1. Introduction
A spaceborne bistatic radar system is defined when antennas for reception and transmission are physically separated and located aboard two spacecraft. The system could be either cooperating (transmitter and receiver designed for the specific bistatic application), or non-cooperating (receiver designed independently of the transmitter) [
1]. Non-cooperating systems can use already-existing satellite instruments, such as Synthetic Aperture Radars (SARs), as transmitters (or illuminators) [
2]. Bistatic applications were investigated in the fields of target detection [
3,
4] and planetology [
5]. Concerning Earth Observation, the specular reflection from navigation satellites was exploited for scatterometric applications over the oceans [
6]. The possibility to envisage bistatic configurations for SAR interferometry was studied in [
7,
8]. Recently, experiments involving the X-band have been carried out (e.g., [
9–
11]) to assess the additional information contained in the bistatic reflectivity of targets.
As for land applications, Ceraldi
et al. [
12] demonstrated the potential to detect the signal scattered in the specular direction for retrieving bare soil parameters. However, they outlined that measuring the coherent component of the scattered signal by means of bistatic radars is problematic, because the spatial resolution becomes very poor around the specular direction, and ambiguities between surface points before and after the specular point occur [
13]. Zavorotny and Voronovich stated, in a brief report [
14], that considering a GPS signal impinging on a rough land surface, soil moisture is related to the ratio between horizontally and vertically polarized scattered waves.
In a previous work [
2], we reported on a theoretical investigation aiming at identifying the best bistatic measurement configuration, in terms of incidence angle, observation direction, polarization, and frequency band, for soil moisture content (SMC) retrieval. In addition, we evaluated the improvement of the estimation accuracy with respect to the conventional backscattering measurements. While in [
2] we did not tackle the problem of verifying the identified radar configurations from a technical point of view, this work deals with spatial resolution, spatial coverage and duty cycle (
i.e., the fraction of the orbit in which suitable bistatic data collection is ensured). It aims at evaluating whether an adequate overlap between the footprints of the transmitting and receiving antennas is ensured for the bistatic observation geometry that guarantees both an improvement of the quality of the SMC retrieval and a quite good spatial resolution.
We point out that investigations on the design of a spaceborne mission implementing a configuration of bistatic radars devoted to specific environmental applications are generally lacking in the literature. Moreover, the literature generally deals with fixed bistatic configurations (i.e., the static design), without considering the orbital dynamics, while the feasibility of maintaining the selected configuration of sensors along the orbit of the spacecraft on which the receiver is installed, ensuring good performances in terms of operational parameters such as spatial coverage, is a crucial aspect.
In the present study, the nominal bistatic mission is considered, so that problems such as the orbit and attitude controls are not tackled, thus implicitly assuming that the passive system is periodically controlled in order to maintain the designed bistatic formation.
In Section 2, the findings regarding the bistatic configurations most suitable for SMC retrieval are summarized and the selection of one configuration, based on the evaluation of the spatial resolution, is described. In Section 3, the orbit design approach is depicted, while, in Section 4, the results of the analysis of the spatial coverage are presented and discussed. Section 5 draws the main conclusions.
3. Orbit Design
According to the chosen frequency (
i.e., C-band), we have made reference to the ASAR instrument onboard Envisat. The real operative Image Swath Modes (ISMs) and Wide Swath Mode (WSM) have been taken into account for the analysis. ISMs guarantee a fairly high resolution, but have a smaller near and far range capability that implies worse monostatic (and thus bistatic) spatial coverage. WSM presents opposite characteristics.
Table 1 reports some parameters of the ASAR illuminator in Image and Wide Swath modes. Note that, among the seven Envisat/ASAR Image Swath Modes, only four were selected, because the other ones observe the Earth with incidence angles larger than 35°, which are not compatible with our requirements for SMC retrieval.
We have firstly designed the orbit of the receiver by choosing its observation geometry at the equator based on the requirements for SMC estimation (
i.e., the static design) and then the orbits of both platforms have been propagated to evaluate the antenna footprint superimposition,
i.e., the spatial coverage of the bistatic acquisitions. Note that the time when the passive satellite is over the equator has been assumed as the initial one [
17].
We have made a number of assumptions. Firstly, that the bistatic system is non-cooperative, so that orbit, attitude (including yaw-steering) and antenna pointing of the active system are not subordinated to the bistatic acquisition requirements. This is of course a worst case assumption, which aims to use existing radar as source of opportunity. Secondly, the transmitting antenna is right-looking. Moreover, the satellite carrying the receiver (hereafter denoted also as the passive satellite) flies in formation with that carrying the illuminator (the active one), on a parallel orbit, thus establishing a “parallel orbit pendulum” configuration, in which the platforms move along orbits with the same inclination, but different ascending nodes. In principle, also the “leader-follower” configuration, in which the spacecraft fly on the same orbit, but with different crossing times of ascending node, would be possible. However, it does not allow any of the bistatic observation geometries previously selected if a non-cooperative bistatic system and a side-looking illuminator are assumed.
Another hypothesis we have made for the static design of the orbits is that the receiver performs bistatic acquisitions only along the ascending pass, since the crossing of the orbits near the poles makes the transmitter to illuminate out of the footprint of the receiver. Note that an eventual left/right looking capability of the receiver would dramatically change the bistatic angles with respect to the required ones, whereas only a cooperative transmitter with left/right looking capability would enable valuable data acquisition in the descending pass.
The orbit of a spacecraft is described by means of the well-known six Keplerian parameters: semi-major-axis, eccentricity, inclination, right ascension of the ascending node (Ω), perigee argument, and mean anomaly (
M). We have considered Envisat as the active satellite, so that its orbital parameters are fixed. The passive satellite semi-major-axis, eccentricity, and inclination have been chosen coincident with those of the active one, in order to reduce orbit maintenance operations. In addition, the same perigee argument has been considered, to minimize the instantaneous satellite velocity differences and in turn, the along-track relative displacements [
17].
The remaining design parameters (Ω and
M) define the difference between the orbits of the two satellites. The differences between the ascending node right ascensions (ΔΩ) and the mean anomalies (Δ
M),
i.e., the relative position of the satellites (shown in
Figure 3), have been computed by means of the formulas provided in [
17]. Δ
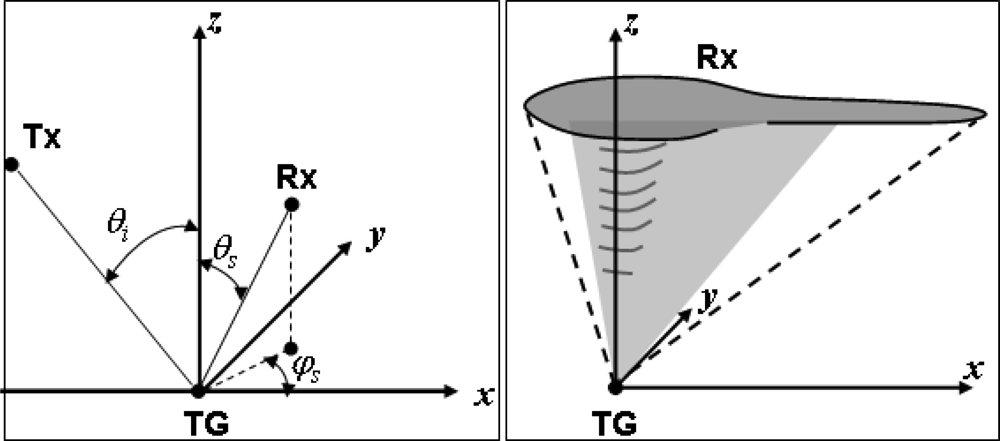
M has been chosen in order to enable the passive satellite to be located in the incidence plane of the illuminator at the initial time, thus fixing the observation geometry when the receiver is over the equator. Such a condition corresponds to
φs = 180°, in this case.
Figure 3 shows the position of the active and passive satellites when the latter is over the equator and the line joining the two positions (
i.e., the baseline). This direction has to be comprised within the azimuth aperture of both the transmitting and receiving antennas. To calculate ΔΩ and Δ
M, we have assumed
θi equal to the maximum among those suggested in [
2] (
i.e., 35°), in order to increase the range of latitudes for bistatic acquisitions [
17]. As for
θs at the initial epoch, we have firstly considered that the receiver should be in the backward quadrant because of the constraint we have imposed for spatial resolution. Then we have made the hypothesis that, for a soil moisture application, the minimum bistatic swath should be 10 km.
By choosing
θs = 0° at the initial epoch, the time interval during which
θs is in a useful range (
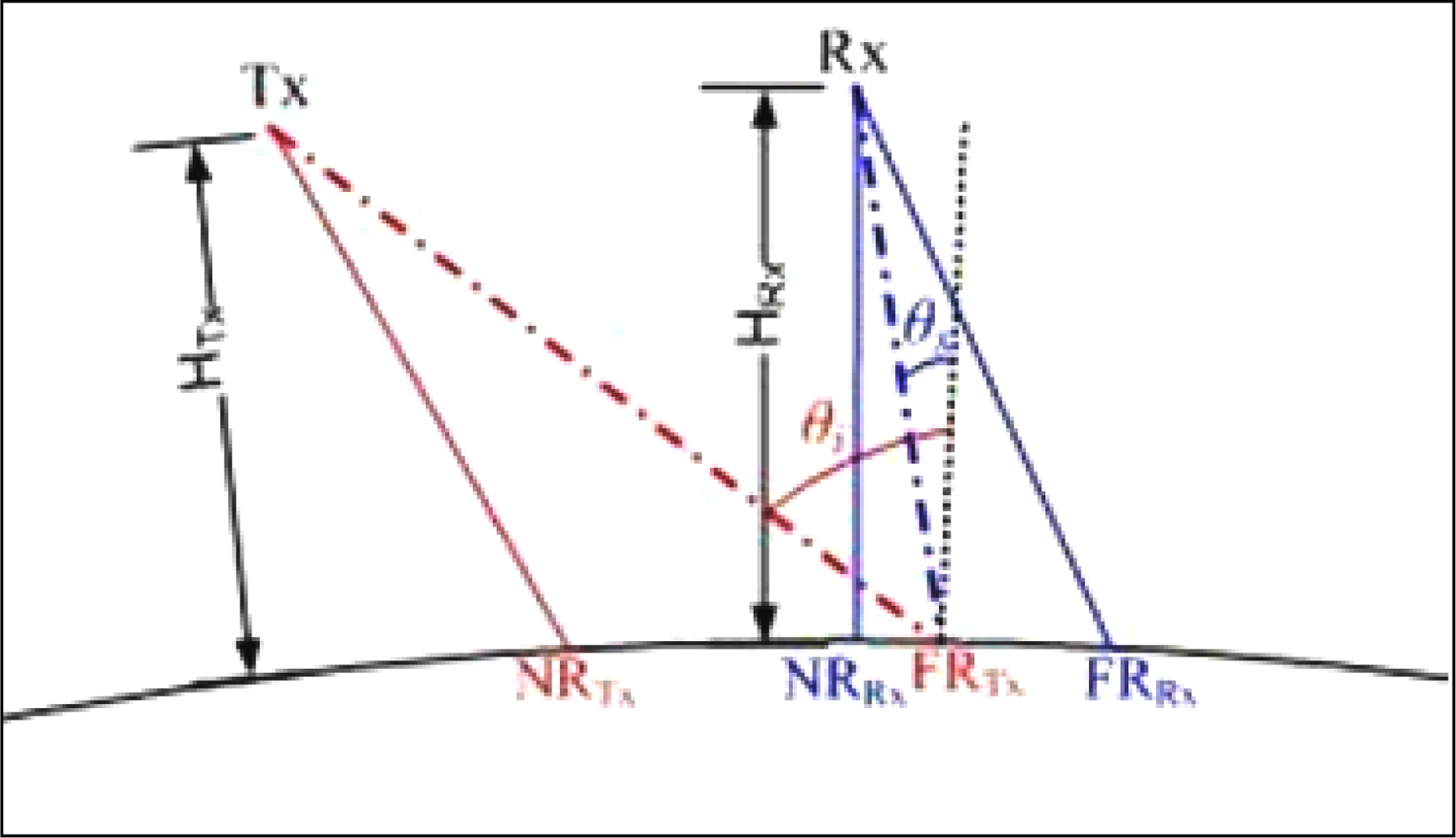
i.e., [0°–8°]) when the orbits are propagated is maximized (note that at the equator the baseline is at its maximum, as will be discussed in Section 4). However, looking at
Figure 4, that shows the observation geometry at the initial time, it can be noted that such a choice would imply a very small bistatic swath at the equator (theoretically, only one point), because for
θs = 0° the receiver is just above the boundary of the area illuminated by Envisat, with the maximum allowable zenith angle (
i.e., 35°), and cannot accomplish a forward observation. For the same reason, the ISMs whose far range looking angle is less than 35° (see
Table 1) do not perform bistatic acquisitions over the equator, as will be shown in Section 4. The receiving near range point (NR
RX) has to be located within the area illuminated by the transmitting antenna (see
Figure 4) and its distance to the transmitter far range point (FR
TX) cannot be less than 10 km. Hence, the best choice for the initial
θs turned out to be 1°, which is (approximately) the minimum zenith scattering angle for which the overlapping between the footprints of the antennas occurs with the selected minimum width of the bistatic swath.
Table 2 reports the selected configuration and the orbital parameters at the initial epoch, that is the static design.
The Satellite Tool Kit (available at:
http://www.agi.com) has been successively used to propagate the orbits, taking into account only the orbital perturbations due to the
J2 geo-potential harmonic, to maintain a heliosynchronous orbit and assuming negligible the orbital decay (
i.e., the effect of the differential aerodynamic drag), as done in [
18].
4. Discussion of the Outcomes
To produce coverage data, an appropriate software tool, which accounts for spacecraft propagated orbits, yaw-steering maneuvers of both spacecraft, sensors pointing geometry, Earth rotation and estimates the targeted area, has been developed. At each time point of the simulation, whose overall period is 35 days,
i.e., the orbit repeat cycle of Envisat, the software evaluates the area of the Earth surface observed simultaneously by the two antennas on the basis of their aperture angles and of the satellites’ positions. The portion of this area which is actually observed according to the observation geometry selected in section 2,
i.e.,
θI < 35°,
θs ∈ [0°−8°] and
φs ∈ [90°−270°], is the area target. To perform the simulation, we have considered the transmitter able to illuminate according to the real access capabilities of the reference mission (
i.e., Envisat, see
Table 1). As for the receiving antenna, we have assumed a main lobe azimuth aperture of 6° (see [
17]) which is capable to point toward the area illuminated by the transmitter by means of attitude maneuvers or electronic steering. The latter does not ensure the zero Doppler condition of bistatic measurements, but its purpose is the superposition of the antenna footprints.
Table 3 reports the results. It can be noted that WSM presents the best results in terms of duty cycle (∼40%) thanks to the greater access capability. Higher resolution modes achieve duty cycles not less than 12% (actually 11.9%) and that can exceed 21%, which is a still acceptable performance, considering that we are in the hypothesis of a fully non-cooperative system,
i.e., the maximum duty cycle is 50% for a fixed looking side of the transmitting antenna. It is worth noting that we have decided to discard the swaths smaller than 10 km in the computation of the fraction of orbital period during which the bistatic data are acquired and this choice implies an overall decrease of the resulting duty cycle.
ISM1 and WSM reach the highest latitudes (almost 72° in both the geographic hemispheres). In addition, the far range capability of the considered transmitter operating mode limits the latitude range of bistatic acquisitions. As stated when discussing
Figure 4, since the passive satellite orbit is defined according to the maximum incidence angle identified for the application (
i.e., 35°) during static design, the operational modes ISM1, ISM2 and ISM3 do not perform bistatic acquisitions at low latitudes but they focus on mid-latitude belts.
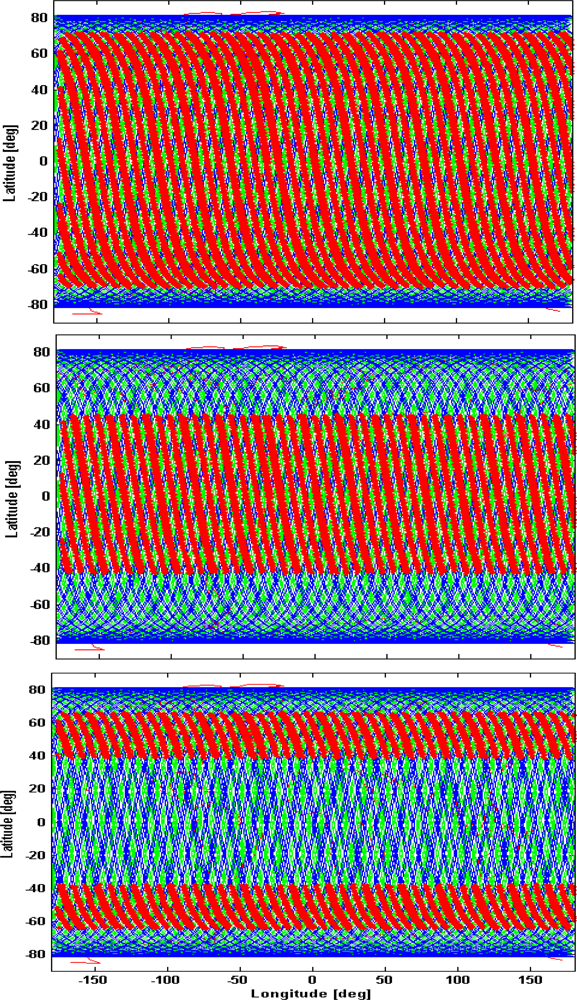
Figure 5 shows the Earth maps with the acquired targeted areas (red dots) for WSM (upper panel), ISM4 (central panel) and ISM2 (lower panel). The ground tracks of the active and passive satellites are plotted in green and blue, respectively. Although our simulation considers the entire Envisat orbit repeat cycle (35 days),
Figure 5 regards a time-window of one week, for the sake of clarity. The different latitude bands covered in WSM, ISM4 and ISM2 are clearly visible.
To quantify the spatial coverage of the bistatic measurements, we have evaluated the ratio between the sum of the areas of bistatic targets and the area of the Earth surface within the covered latitude range. Such a computation sums up all the areas imaged during a complete Envisat cycle of 35 days, including also zones already observed in previous orbits. This result is therefore an estimate of the fractional coverage that does not ensure that every point within a specific latitude range is actually covered by a bistatic acquisition, but that can indicate whether full coverage could be potentially obtained in such a range. The ratio is minimum for ISM4 and is in the order of 65% for WSM, while for ISM1 and ISM2 our evaluation indicates that full coverage might be achieved within 35 days.
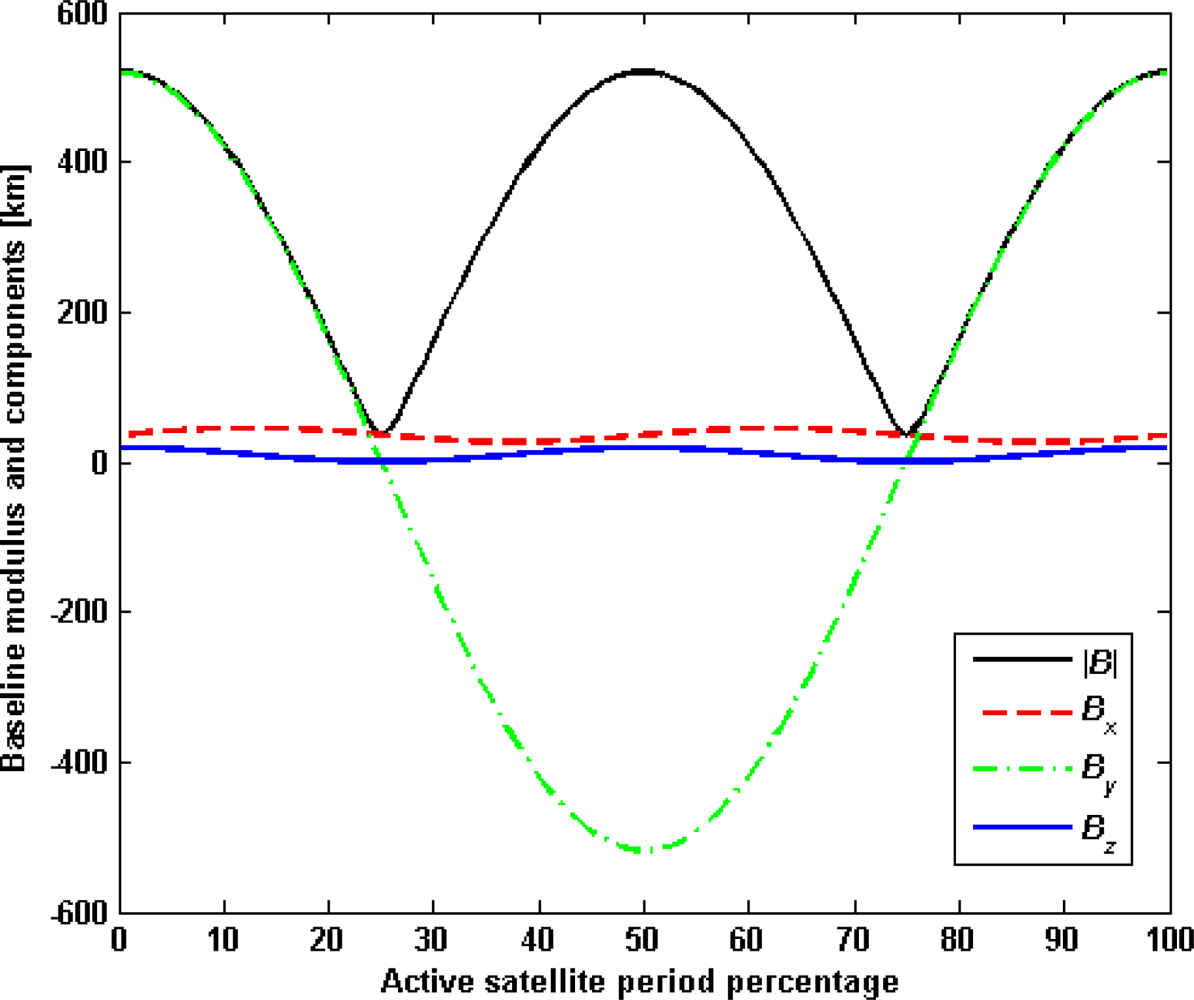
Finally,
Figure 6 shows the trends of the baseline absolute value |
B| (distance between the satellites) and of its components (
Bx,
By,
Bz) throughout one orbit, that we obtained as a consequence of our design. The baseline is evaluated on the orbital reference frame centered in the centre of mass of the active satellite, with
x-axis towards its instantaneous velocity vector,
y-axis normal to the orbital plane and
z-axis in direction of the Earth center. The distance between the satellites achieves its maximum value at the equator and the minimum one near the poles.
By represents the main component of
B and changes its sign at the orbit interceptions near the poles, when the satellites change their relative orientation, while it achieves the maximum value at the equator. Also
Bz goes to zero at the orbits interceptions and the minimum baseline at the orbit crossing,
i.e., the safety distance between the satellites, has turned out to be equal to 35.5 km, a result similar to that found in [
18] in which Envisat was used as the active satellite. Observing
Figure 6, it can be noted that the maximum value of the baseline (at the equator), is slightly larger than 500 km.
5. Conclusions
Some outcomes of a coverage analysis of a spaceborne bistatic mission for SMC estimation have been presented. The study has started from the identification of the bistatic configurations suitable for SMC retrieval, in terms of frequency and ideal transmitter-target-receiver relative geometry accomplished in a previous study. An evaluation of the spatial resolution of the bistatic system has been firstly carried out. It has led us to restrict our analysis to observations around nadir and in the backward quadrant. Then, the study has assessed the feasibility of the nominal mission in terms of spatial coverage and duty cycle, assuming a non-cooperative system, with Envisat/ASAR as illuminator.
We have shown that the Wide Swath Mode has the best duty cycle (∼40%). Higher resolution image modes yield acceptable results in terms of this parameter (never less than 12%), considering that, in our hypothesis of fully non-cooperative system, the maximum achievable value is 50%. It has been found, that, for high resolution modes, the minimum and maximum latitudes do not necessarily identify one latitude belt, so that their setting may allow focusing on a particular geographic region, such as mid-latitude areas. In a selected latitude band, it might be possible to achieve full coverage within the Envisat orbit repeat cycle (35 days), while for a larger latitude range, almost covering the entire planet, it is unfeasible.
The improvement of soil moisture retrieval that we have demonstrated, in a previous work, to be achievable through a bistatic mission, may be actually obtained by designing a simple and cheap (even in terms of power requirements) receiver that flies in formation with a standard C-band SAR. Combining the active monostatic with the bistatic measurements can strengthen the contribution of single frequency radar observations in many disciplines needing an evaluation of soil moisture, such as hydrology, agriculture and climate change monitoring.
The methodology based on a study of the sensitivity to a geophysical target parameter of bistatic radars, followed by a system performance analysis can be useful for other applications (e.g., vegetation biomass retrieval) and for future missions. For instance, this approach can provide support to a possible employment of a passive receiver flying in formation with the forthcomong European Space Agency (ESA) Sentinel satellites. In particular, the wide swath capability of the Sentinel-1 C-band SAR is expected to improve the coverage performances of the bistatic mission with respect to that computed for Envisat.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}