
Bi-Objective Modelling for Hazardous Materials Road–Rail Multimodal Routing Problem with Railway Schedule-Based Space–Time Constraints


Abstract
:1. Introduction
- (1)
- Customer demands, including origins, destinations, volumes, release times, and due dates.
- (2)
- Multiple hazardous materials flows but single type of hazardous materials, i.e., multiple origin–destination pairs.
- (3)
- Capacitated schedule-based rail services and uncapacitated time-flexible road services [26]. In particular, the restrictions of railway schedules on the routing decision are formulated as the railway schedule-based space–time constraints.
- (4)
- Environmental risk constraint to lower and balance the environmental risk under a given threshold.
- (5)
- Bi-objective optimization, including minimizing the total generalized costs of transporting the multiple hazardous materials and the social risk along the planned routes.
2. Transportation Scenario Description
3. Risk Evaluation and Modelling
3.1. Social Risk Evaluation
3.2. Environmental Risk Evaluation
4. Mathematical Model
4.1. Notations
- Indices
- Sets
- Parameters
- Decision Variables
4.2. A Node–Arc-Based Model
- Objective 1
- Objective 2
- Subject to
- (i)
- If = 0, (which is always satisfied), which means the arrival time of the hazardous materials at the node is not restricted by the unselected rail services.
- (ii)
- If = 1 and = 1, according to Equation (16), = 0, i.e., the hazardous materials arrive at node by road service, then according to Equation (21), , which matches the description of Case 1.1 in Section 2.
- (iii)
- If = 1 and = 1, just contrary to Equation (2), there is , which matches the description of Case 1.2 in Section 2.
- (i)
- If the following transportation is by road service (, and according to Equation (15), there exists = 0); we are far more concerned about the unloading start time instead of , because the following operations cannot be conducted until . Therefore, in such a case, , which is more effective than .
- (ii)
- If the following transportation is by rail service (, and according to Equation (16), there exists =0), for similar reasons instead of .
5. Solution Strategy for the Bi-Objective Nonlinear Programming
5.1. Improved Linear Reformulation
- Objective 1
- Objective 2
- Subject to
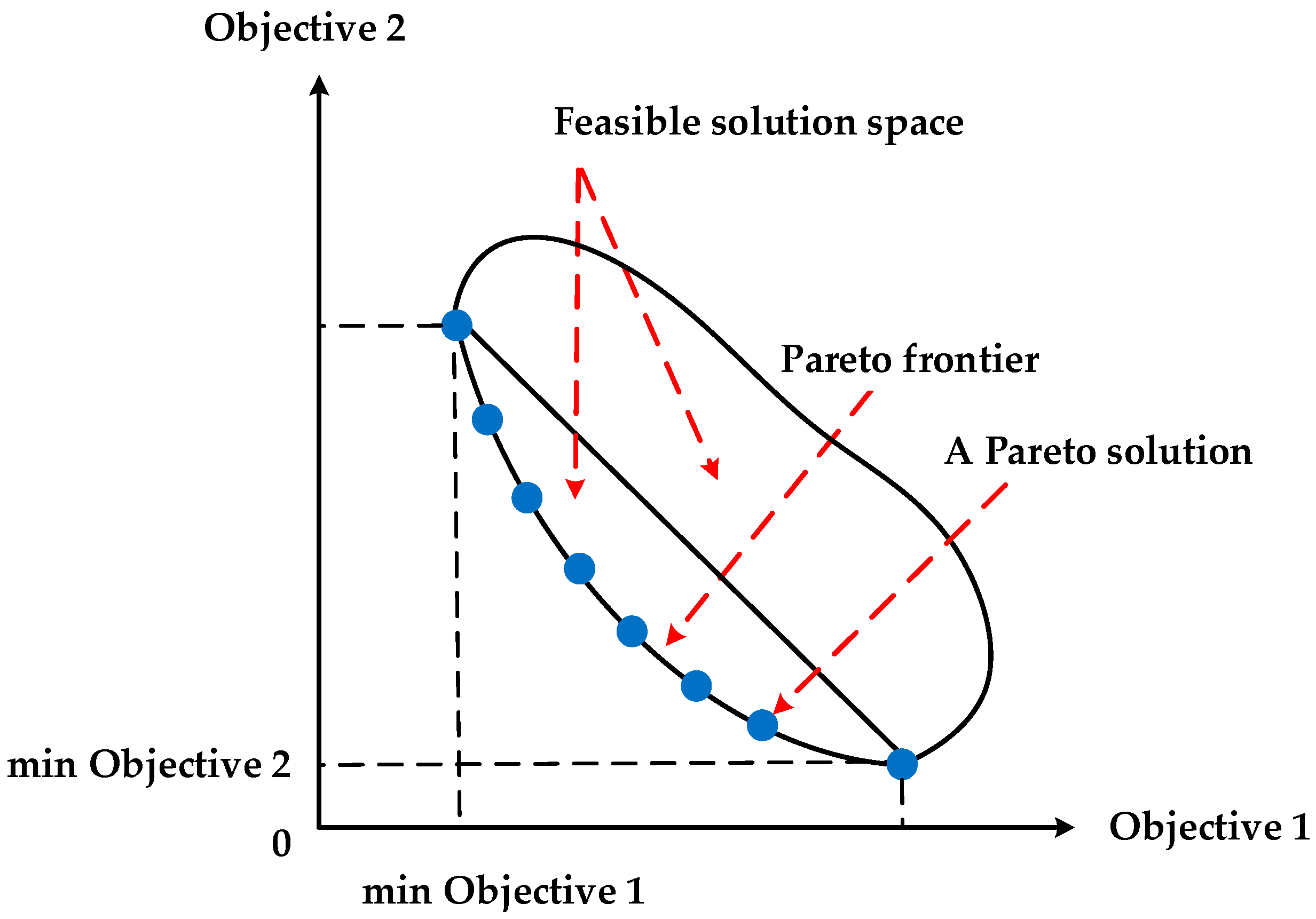
5.2. Normalized Weighted Sum Method for the Bi-Objective Optimization
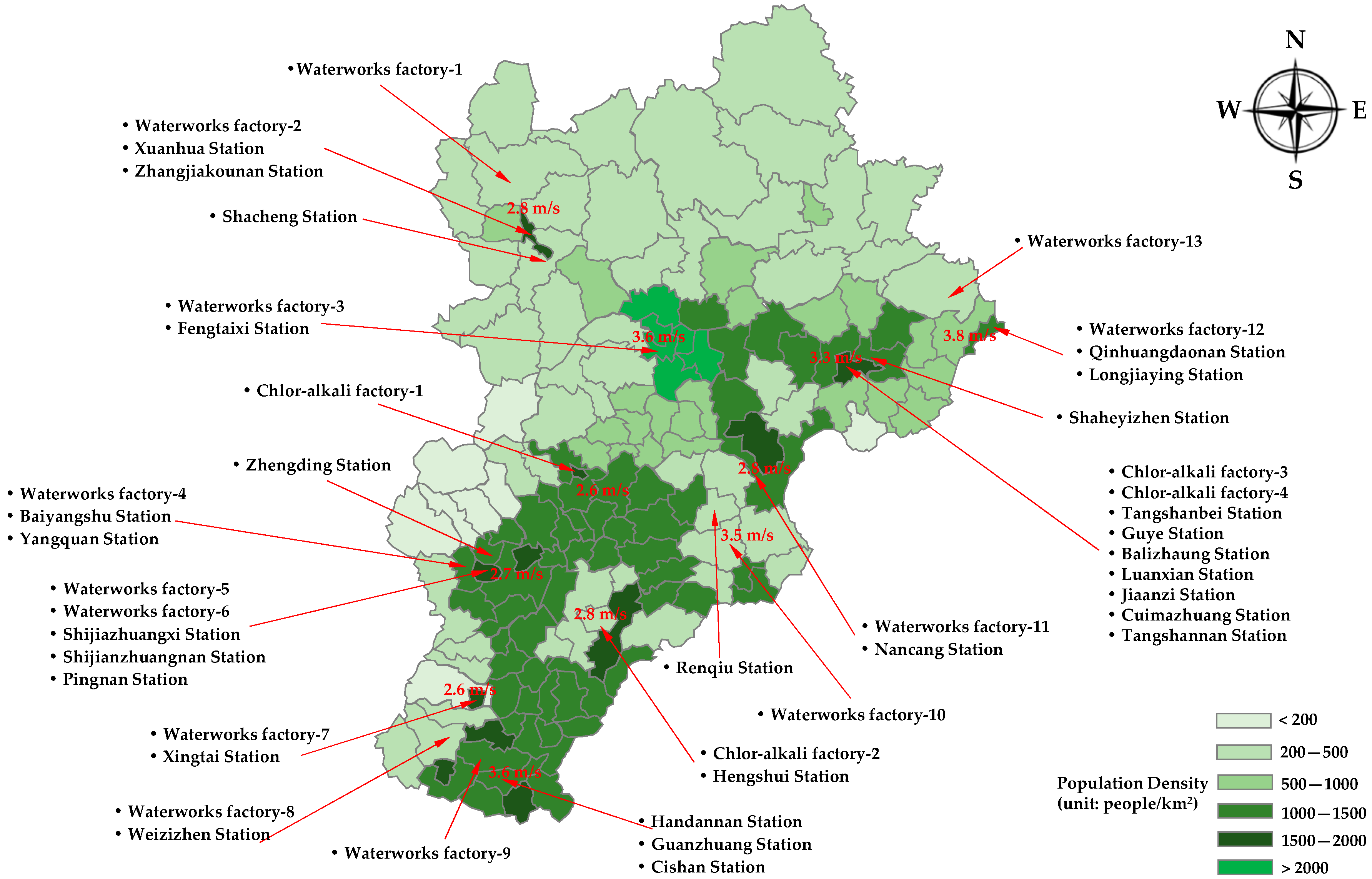
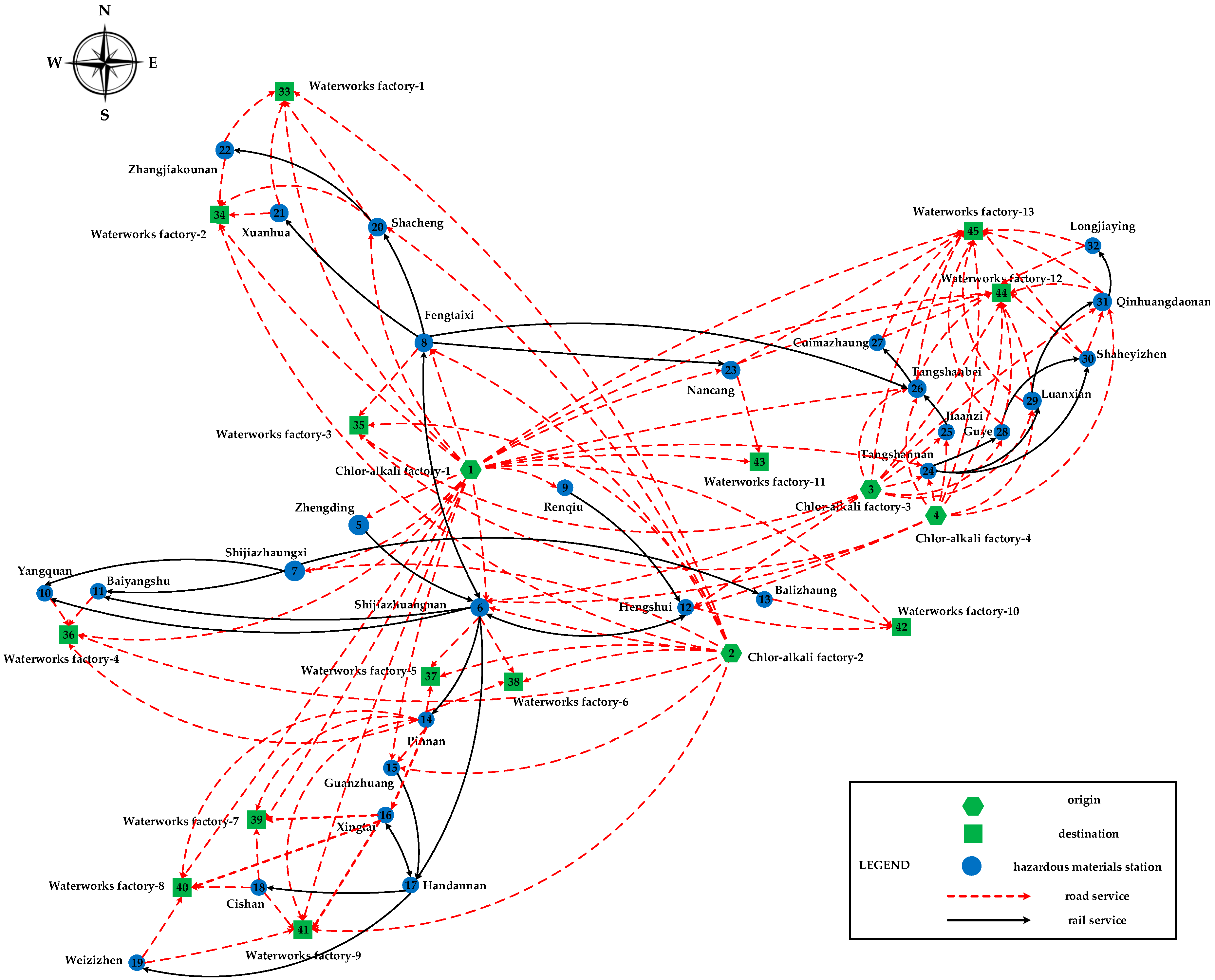
6. Empirical Case Study from the Beijing–Tianjin–Hebei Region in China
6.1. Case Description and Parameter Setting
6.2. Optimization Results and Discussions
6.2.1. Simulation Environment
6.2.2. Multimodal Routes Illustration
6.2.3. Single-Objective Scenarios
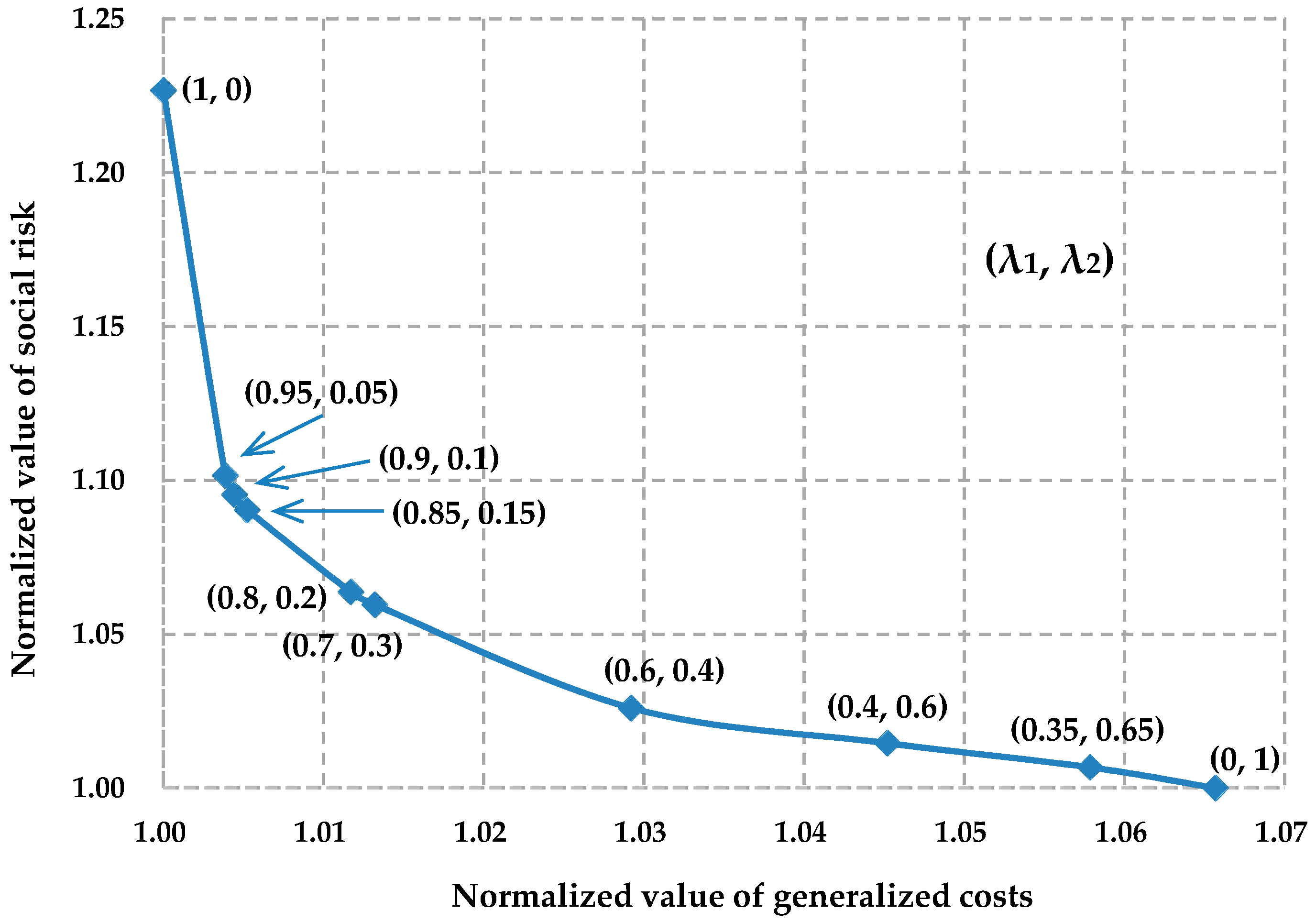
6.2.4. Bi-Objective Scenario
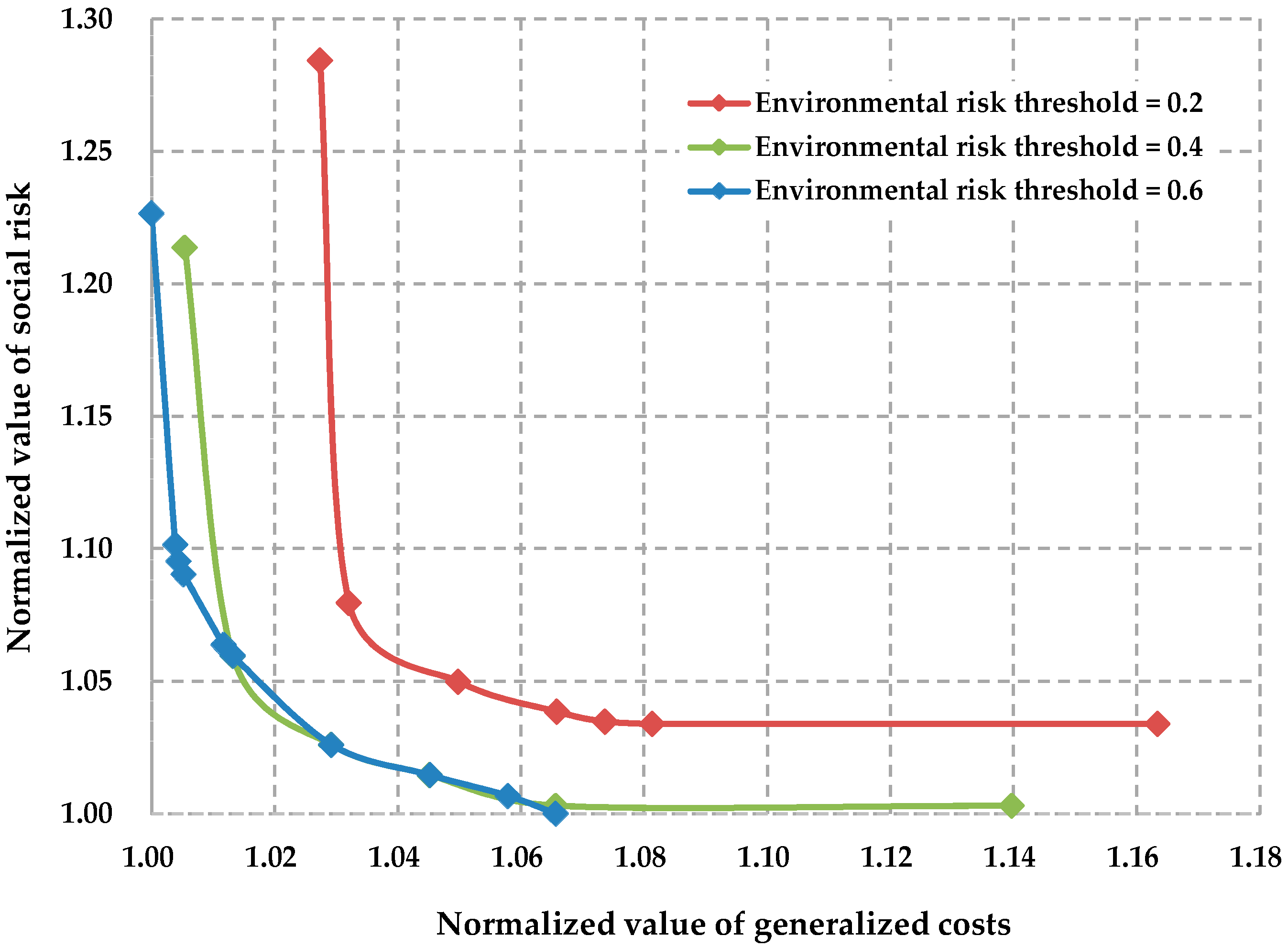
6.2.5. Sensitivity of the Pareto Solutions with Respect to the Environmental Risk Threshold
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Model Linear Reformulation
- Reformulation 1. By using a non-negative variable to replace the nonlinear function and adding two linear Equations (A2) and (A3), nonlinear Component (11) in Objective 1 can be reformulated as a linear function (A1).
- (i)
- Hazardous materials get transshipped between rail services at node , i.e., = 1 and = 1, in this case, = 1.
- (ii)
- Hazardous materials get transshipped between road service and rail service at node , i.e., =1 and = 0 or = 0 and = 1, in this case, = 0.
- (iii)
- Node is not covered in the route of hazardous materials , i.e., = 0 and = 0, in this case, = 0.
- Reformulation 2. By using a non-negative decision variable to replace the nonlinear function and adding two linear Equations (A5) and (A6), the nonlinear Component (12) in Objective 1 can be reformulated as a linear function (A4).
- (i)
- If = 0, i.e., hazardous materials arrive at node by the rail service, there are and according to Equations (A5) and (A6), and the minimization of Component (A4) will restrict = 0, which matches the setting that there are no inventory costs at the node if the hazardous materials are transshipped between different rail services.
- (ii)
- If = 1, i.e., hazardous materials arrive at node by road service, there are and , and minimization of Component (A4) will restrict , which matches the setting that inventory costs will be charged at the node according to the charged inventory time if the hazardous materials are transshipped from road service to rail service.
- Reformulation 3. Nonlinear Equation (21) is equivalent to linear Equation (A7) as follows.
- Reformulation 4. Nonlinear Equations (23), (24) and (26) are separately equivalent to linear Equations (A8)–(A13). For detailed proofs of the above three equivalencies, readers can refer to our previous study [26].
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node | Population Exposure (Unit: 104 People) | Node | Population Exposure (Unit: 104 People) | Node | Population Exposure (Unit: 104 People) |
|---|---|---|---|---|---|
| 1 | 3.44 | 16 | 2.87 | 31 | 1.74 |
| 2 | 0.66 | 17 | 1.32 | 32 | 1.74 |
| 3 | 2.29 | 18 | 0.58 | 33 | 0.50 |
| 4 | 2.29 | 19 | 0.58 | 34 | 2.48 |
| 5 | 2.31 | 20 | 0.66 | 35 | 3.56 |
| 6 | 2.13 | 21 | 2.48 | 36 | 2.13 |
| 7 | 2.84 | 22 | 2.48 | 37 | 2.84 |
| 8 | 3.56 | 23 | 2.32 | 38 | 2.84 |
| 9 | 0.32 | 24 | 2.29 | 39 | 2.87 |
| 10 | 2.13 | 25 | 2.29 | 40 | 0.58 |
| 11 | 2.13 | 26 | 2.29 | 41 | 1.12 |
| 12 | 0.66 | 27 | 2.29 | 42 | 0.43 |
| 13 | 2.29 | 28 | 2.29 | 43 | 2.32 |
| 14 | 2.13 | 29 | 2.29 | 44 | 1.74 |
| 15 | 1.32 | 30 | 1.69 | 45 | 0.82 |
| Arc | Distance (Unit: km) | Time (Unit: h) | Population Exposure (Unit: 104 People) | Environmental Capacity (Unit: 104 Ton) | Arc | Distance (Unit: km) | Time (Unit: h) | Population Exposure (Unit: 104 People) | Environmental Capacity (Unit: 104 Ton) |
|---|---|---|---|---|---|---|---|---|---|
| (1, 5) | 129 | 1.8 | 57.17 | 7.47 | (4, 26) | 80 | 1 | 56.72 | 4.64 |
| (1, 6) | 153 | 2.3 | 81.36 | 8.86 | (4, 29) | 108 | 1.8 | 76.57 | 6.26 |
| (1, 7) | 162 | 2 | 96.92 | 9.39 | (4, 45) | 215 | 2.8 | 117.47 | 12.46 |
| (1, 8) | 148 | 1.8 | 62.31 | 8.57 | (6, 37) | 8 | 0.2 | 6.74 | 0.46 |
| (1, 9) | 90 | 1.5 | 52.42 | 5.27 | (6, 38) | 10 | 0.3 | 8.42 | 0.58 |
| (1, 15) | 243 | 2.8 | 123.84 | 14.08 | (8, 35) | 3 | 0.2 | 3.99 | 0.17 |
| (1, 20) | 235 | 3.3 | 57.28 | 13.62 | (10, 36) | 9 | 0.4 | 4.39 | 0.52 |
| (1, 23) | 174 | 2.5 | 61.69 | 10.08 | (11, 36) | 8 | 0.3 | 3.90 | 0.46 |
| (1, 24) | 291 | 3.4 | 77.37 | 16.86 | (12, 42) | 152 | 2 | 72.41 | 8.81 |
| (1, 26) | 308 | 3.7 | 76.43 | 17.84 | (13, 42) | 15 | 0.6 | 6.48 | 0.87 |
| (1, 33) | 403 | 5 | 98.22 | 23.35 | (14, 15) | 101 | 1.4 | 49.23 | 5.85 |
| (1, 34) | 248 | 3.3 | 63.74 | 14.37 | (14, 16) | 123 | 1.7 | 31.67 | 7.13 |
| (1, 36) | 238 | 3.2 | 137.11 | 13.79 | (14, 36) | 114 | 1.8 | 75.78 | 6.60 |
| (1, 39) | 262 | 3.3 | 156.74 | 15.18 | (14, 37) | 9 | 0.4 | 5.58 | 0.52 |
| (1, 40) | 382 | 4.2 | 169.28 | 22.13 | (14, 38) | 9 | 0.4 | 5.58 | 0.52 |
| (1, 41) | 333 | 3.8 | 162.32 | 19.29 | (14, 39) | 119 | 1.9 | 65.92 | 6.89 |
| (1, 42) | 164 | 2.3 | 83.58 | 9.50 | (14, 40) | 239 | 2.7 | 119.68 | 13.85 |
| (1, 43) | 171 | 2.3 | 64.41 | 9.91 | (14, 41) | 191 | 2.4 | 63.48 | 11.07 |
| (1, 44) | 434 | 4.9 | 211.56 | 25.15 | (16, 39) | 6 | 0.2 | 3.99 | 0.35 |
| (1, 45) | 445 | 5.4 | 226.78 | 25.78 | (16, 40) | 143 | 1.8 | 22.18 | 8.29 |
| (2, 6) | 150 | 1.8 | 76.44 | 8.69 | (16, 41) | 95 | 1.5 | 43.36 | 5.50 |
| (2, 7) | 151 | 1.7 | 76.95 | 8.75 | (18, 39) | 71 | 1.6 | 15.10 | 4.11 |
| (2, 8) | 265 | 6 | 131.52 | 15.35 | (18, 40) | 56 | 0.8 | 9.93 | 3.24 |
| (2, 12) | 3 | 0.3 | 0.40 | 0.17 | (18, 41) | 45 | 1 | 13.96 | 2.61 |
| (2, 15) | 150 | 2.1 | 66.47 | 8.69 | (19, 40) | 75 | 1.1 | 13.29 | 4.35 |
| (2, 20) | 377 | 4.5 | 125.30 | 21.84 | (19, 41) | 161 | 2.1 | 46.84 | 8.75 |
| (2, 33) | 577 | 6.6 | 145.74 | 33.43 | (20, 33) | 215 | 2.6 | 100.04 | 12.46 |
| (2, 34) | 422 | 5.2 | 114.07 | 24.45 | (20, 34) | 59 | 1 | 41.83 | 3.42 |
| (2, 35) | 265 | 3 | 131.52 | 15.35 | (21, 33) | 168 | 2.2 | 72.21 | 9.73 |
| (2, 36) | 237 | 3 | 119.52 | 13.73 | (21, 34) | 4 | 0.1 | 2.39 | 0.21 |
| (2, 37) | 155 | 1.9 | 78.99 | 8.98 | (22, 33) | 113 | 1.9 | 48.57 | 6.55 |
| (2, 38) | 140 | 1.8 | 71.35 | 8.11 | (22, 34) | 23 | 0.5 | 15.29 | 1.33 |
| (2, 41) | 256 | 2.8 | 113.44 | 14.83 | (23, 43) | 8 | 0.3 | 3.37 | 0.46 |
| (3, 6) | 439 | 4.8 | 184.81 | 25.43 | (23, 44) | 266 | 3.1 | 126.13 | 15.41 |
| (3, 12) | 376 | 4.4 | 159.96 | 21.78 | (23, 45) | 278 | 4.2 | 123.19 | 16.11 |
| (3, 24) | 23 | 0.6 | 17.84 | 1.33 | (26, 44) | 137 | 1.6 | 77.71 | 7.94 |
| (3, 25) | 10 | 0.3 | 7.76 | 0.58 | (26, 45) | 149 | 2.2 | 81.41 | 8.63 |
| (3, 26) | 27 | 0.7 | 19.14 | 1.56 | (27, 44) | 140 | 1.7 | 79.41 | 8.11 |
| (3, 28) | 17 | 0.4 | 16.87 | 0.98 | (27, 45) | 152 | 2.2 | 83.05 | 8.81 |
| (3, 29) | 42 | 1 | 32.57 | 2.43 | (28, 44) | 126 | 1.6 | 76.77 | 7.30 |
| (3, 31) | 144 | 1.9 | 73.38 | 8.34 | (28, 45) | 138 | 2.1 | 70.33 | 8.00 |
| (3, 35) | 201 | 2.7 | 172.80 | 11.65 | (29, 44) | 101 | 1.5 | 58.95 | 5.85 |
| (3, 44) | 142 | 1.8 | 80.55 | 8.23 | (29, 45) | 101 | 2.2 | 61.54 | 5.85 |
| (3, 45) | 154 | 2.3 | 84.14 | 8.92 | (30, 31) | 97 | 1.5 | 59.10 | 5.62 |
| (4, 6) | 412 | 4.4 | 173.45 | 23.87 | (30, 44) | 95 | 1.3 | 57.89 | 5.50 |
| (4, 12) | 359 | 4.4 | 152.72 | 20.80 | (30, 45) | 107 | 1.7 | 59.27 | 6.20 |
| (4, 24) | 59 | 0.8 | 41.83 | 3.42 | (31, 44) | 7 | 0.3 | 6.20 | 0.41 |
| (4, 25) | 74 | 1 | 52.47 | 4.29 | (31, 45) | 131 | 1.7 | 101.59 | 7.59 |
| (4, 31) | 171 | 2.1 | 96.99 | 9.91 | (32, 44) | 14 | 0.5 | 12.41 | 0.81 |
| (4, 35) | 204 | 2.8 | 175.38 | 11.82 | (32, 45) | 142 | 1.8 | 100.68 | 8.23 |
| (4, 44) | 169 | 1.9 | 145.29 | 9.79 |
| Train No. | 47501 | 47503 | 47505 | 47507 | 21018 | 21020 | 21022 | 21024 | 21026 | 34029 | 34035 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Origin | 5 | 5 | 5 | 5 | 6 | 6 | 6 | 6 | 6 | 6 | 6 |
| Loading start time | 20.4 | 2.8 | 10.6 | 15.1 | 1.6 | 0.8 | 3.1 | 6 | 10.3 | 1.5 | 5.8 |
| Loading cutoff time | 20.9 | 3.8 | 11.5 | 15.8 | 3.1 | 2.3 | 4.6 | 7.5 | 11.8 | 3 | 7.3 |
| Classification start time | 20.7 | 3.5 | 11.3 | 15.6 | 2.6 | 2.8 | 4.5 | 6.5 | 10.8 | 2 | 6.3 |
| Classification cutoff time | 21.2 | 4 | 12.2 | 16.2 | 3.6 | 3.8 | 5.1 | 8 | 12.3 | 3.5 | 7.8 |
| Departure time | 21.4 | 4.3 | 12.6 | 16.5 | 4.1 | 4.3 | 5.6 | 8.5 | 12.8 | 4 | 8.3 |
| Destination | 6 | 6 | 6 | 6 | 8 | 8 | 8 | 8 | 8 | 10 | 10 |
| Arrival time | 22.3 | 5.1 | 13.4 | 17.4 | 18 | 18.4 | 18.7 | 18.8 | 19.5 | 7.5 | 10.8 |
| Disassembly start time | 22.5 | 5.3 | 13.6 | 17.7 | 18.5 | 18.9 | 19.2 | 18.3 | 19 | 7 | 10.3 |
| Disassembly cutoff time | 23 | 5.7 | 14.2 | 18.4 | 20 | 20.5 | 20.7 | 20 | 21 | 8.5 | 12 |
| Unloading start time | 22.8 | 5.5 | 14 | 18 | 19 | 19.4 | 19.7 | 19.8 | 20.5 | 8.5 | 11.8 |
| Unloading cutoff time | 23.5 | 6 | 14.5 | 19 | 20.5 | 21 | 21.2 | 21.3 | 22 | 10 | 13.3 |
| Distance (unit: km) | 17 | 17 | 17 | 17 | 273 | 273 | 273 | 273 | 273 | 115 | 115 |
| Capacity (unit: ton) | 706 | 894 | 994 | 762 | 1973 | 1354 | 1181 | 1541 | 1668 | 799 | 994 |
| Population exposure (unit: 104 people) | 9.86 | 9.86 | 9.86 | 9.86 | 146.59 | 146.59 | 146.59 | 146.59 | 146.59 | 64.22 | 64.22 |
| Environmental capacity (unit: 104 ton) | 13.67 | 13.67 | 13.67 | 13.67 | 219.45 | 219.45 | 219.45 | 219.45 | 219.45 | 92.44 | 92.44 |
| Train No. | 34047 | 34055 | 34001 | 34045 | 47551 | 47555 | 47557 | 32101 | 32105 | 32109 | 32119 |
| Origin | 6 | 6 | 6 | 6 | 6 | 6 | 6 | 6 | 6 | 6 | 6 |
| Loading start time | 9.3 | 11.8 | 16.1 | 8.6 | 17.9 | 5.5 | 11.7 | 16.3 | 17.1 | 17.3 | 2.8 |
| Loading cutoff time | 10.8 | 13.3 | 17.6 | 10.1 | 18.4 | 6.2 | 12.3 | 17.8 | 18.6 | 18.8 | 4.3 |
| Classification start time | 9.8 | 12.3 | 16.6 | 9.1 | 18.3 | 6 | 11.9 | 16.8 | 17.6 | 17.8 | 3.3 |
| Classification cutoff time | 11.3 | 13.8 | 18.1 | 10.6 | 18.6 | 6.5 | 12.4 | 18.3 | 19.1 | 19.3 | 4.8 |
| Departure time | 11.8 | 14.3 | 18.6 | 11.1 | 18.9 | 6.9 | 12.7 | 18.8 | 19.6 | 19.8 | 5.3 |
| Destination | 10 | 10 | 11 | 11 | 14 | 14 | 14 | 17 | 17 | 17 | 17 |
| Arrival time | 14.3 | 16.8 | 21 | 13.5 | 19.1 | 7 | 12.8 | 21.4 | 22.5 | 22.9 | 7.5 |
| Disassembly start time | 13.8 | 16.3 | 20.5 | 13 | 19.4 | 7.5 | 13.2 | 20.9 | 22 | 22.4 | 7 |
| Disassembly cutoff time | 15.5 | 18 | 22.3 | 14.7 | 19.9 | 8 | 13.7 | 22.4 | 23.8 | 24 | 8.7 |
| Unloading start time | 15.3 | 17.8 | 22 | 14.5 | 20 | 7.8 | 13.5 | 22.4 | 23.5 | 23.9 | 8.5 |
| Unloading cutoff time | 16.8 | 19.3 | 23.5 | 16 | 21 | 8.5 | 14 | 23.9 | 25 | 25.4 | 10 |
| Distance (unit: km) | 115 | 115 | 107 | 107 | 9 | 9 | 9 | 162 | 162 | 162 | 162 |
| Capacity (unit: ton) | 1066 | 1747 | 1062 | 1094 | 874 | 1080 | 972 | 1680 | 1181 | 1145 | 1786 |
| Population exposure (unit: 104 people) | 64.22 | 64.22 | 59.75 | 59.75 | 4.25 | 4.25 | 4.25 | 80.03 | 80.03 | 80.03 | 80.03 |
| Environmental capacity (unit: 104 ton) | 92.44 | 92.44 | 86.01 | 86.01 | 7.23 | 7.23 | 7.23 | 130.22 | 130.22 | 130.22 | 130.22 |
| Train No. | 32123 | 30002 | 30004 | 30006 | 34005 | 34011 | 34037 | 34041 | 34049 | 34013 | 34025 |
| Origin | 6 | 6 | 6 | 6 | 7 | 7 | 7 | 7 | 7 | 7 | 7 |
| Loading start time | 6.8 | 16.7 | 17.4 | 18.3 | 18.3 | 20.1 | 6.6 | 7.8 | 10.3 | 21.4 | 1.6 |
| Loading cutoff time | 8.3 | 18.2 | 18.9 | 19.8 | 19.8 | 21.6 | 8.1 | 9.3 | 11.8 | 22.9 | 3.1 |
| Classification start time | 7.3 | 17.2 | 17.9 | 18.8 | 18.8 | 20.6 | 7.1 | 8.3 | 10.8 | 21.9 | 2.1 |
| Classification cutoff time | 8.8 | 18.7 | 19.4 | 20.3 | 20.3 | 22.1 | 8.6 | 9.8 | 12.3 | 23.4 | 3.6 |
| Departure time | 9.3 | 19.2 | 19.9 | 20.8 | 20.8 | 22.6 | 9.1 | 10.3 | 12.8 | 23.9 | 4.1 |
| Destination | 17 | 12 | 12 | 12 | 10 | 10 | 10 | 10 | 10 | 11 | 11 |
| Arrival time | 11.9 | 21.5 | 22.2 | 23.1 | 23 | 0.8 | 11.3 | 12.4 | 15 | 2 | 6.1 |
| Disassembly start time | 11.4 | 21 | 21.7 | 22.6 | 22.5 | 0.3 | 10.8 | 11.9 | 14.5 | 1.5 | 5.6 |
| Disassembly cutoff time | 13 | 22.8 | 23.5 | 24.3 | 24.6 | 2 | 12.5 | 13.5 | 16.7 | 3.3 | 7.3 |
| Unloading start time | 12.9 | 22.5 | 23.2 | 24.1 | 24 | 1.8 | 12.3 | 13.4 | 16 | 3 | 7.1 |
| Unloading cutoff time | 14.4 | 24 | 24.7 | 25.6 | 25.5 | 3.3 | 13.8 | 14.9 | 17.5 | 4.5 | 8.6 |
| Distance (unit: km) | 162 | 121 | 121 | 121 | 107 | 107 | 107 | 107 | 107 | 99 | 99 |
| Capacity (unit: ton) | 1001 | 1505 | 1109 | 1508 | 1987 | 828 | 1134 | 1727 | 1836 | 940 | 1620 |
| Population exposure (unit: 104 people) | 80.03 | 53.69 | 53.69 | 53.69 | 59.75 | 59.75 | 59.75 | 59.75 | 59.75 | 55.28 | 55.28 |
| Environmental capacity (unit: 104 ton) | 130.22 | 97.26 | 97.26 | 97.26 | 86.01 | 86.01 | 86.01 | 86.01 | 86.01 | 79.58 | 79.58 |
| Train No. | 34031 | 33912 | 33914 | 21001 | 21017 | 21019 | 21023 | 21025 | 21027 | 33039 | 33041 |
| Origin | 7 | 7 | 7 | 8 | 8 | 8 | 8 | 8 | 8 | 8 | 8 |
| Loading start time | 3.6 | 20.4 | 0.4 | 19.1 | 2.5 | 3.5 | 4.1 | 6.8 | 11.1 | 18.5 | 20.5 |
| Loading cutoff time | 5.1 | 21.9 | 1.1 | 20.6 | 4 | 5 | 5.6 | 8.3 | 12.6 | 20 | 22 |
| Classification start time | 4.1 | 20.9 | 0.1 | 19.6 | 3 | 4 | 4.6 | 7.3 | 11.6 | 19 | 21 |
| Classification cutoff time | 5.6 | 22.4 | 1.6 | 21.1 | 4.5 | 5.5 | 6.1 | 8.8 | 13.1 | 20.5 | 22.5 |
| Departure time | 6.1 | 22.9 | 2.1 | 21.6 | 5 | 6 | 6.6 | 9.3 | 13.6 | 21 | 23 |
| Destination | 11 | 13 | 13 | 6 | 6 | 6 | 6 | 6 | 6 | 20 | 20 |
| Arrival time | 8.2 | 3.3 | 5.2 | 5.7 | 11.3 | 13.5 | 15.3 | 20.5 | 0.7 | 22.9 | 0.9 |
| Disassembly start time | 7.7 | 2.8 | 4.7 | 5.2 | 10.8 | 13 | 14.8 | 20 | 0.2 | 22.4 | 0.4 |
| Disassembly cutoff time | 9.5 | 4.6 | 6.3 | 7 | 12.7 | 14.5 | 16.6 | 21.6 | 2 | 23.9 | 2 |
| Unloading start time | 9.2 | 4.3 | 6.2 | 6.7 | 12.3 | 14.5 | 16.3 | 21.5 | 1.7 | 23.9 | 1.9 |
| Unloading cutoff time | 10.7 | 5.8 | 7.7 | 8.2 | 13.8 | 16 | 17.8 | 23 | 3.2 | 25.4 | 3.4 |
| Distance (unit: km) | 99 | 185 | 185 | 273 | 273 | 273 | 273 | 273 | 273 | 121 | 121 |
| Capacity (unit: ton) | 1469 | 1174 | 1253 | 1840 | 1990 | 1146 | 1075 | 1393 | 1495 | 1170 | 922 |
| Population exposure (unit: 104 people) | 55.28 | 75.49 | 75.49 | 146.59 | 146.59 | 146.59 | 146.59 | 146.59 | 146.59 | 33.26 | 33.26 |
| Environmental capacity (unit: 104 ton) | 79.58 | 148.71 | 148.71 | 219.45 | 219.45 | 219.45 | 219.45 | 219.45 | 219.45 | 97.26 | 97.26 |
| Train No. | 33057 | 33061 | 33067 | 35547 | 35553 | 35557 | 35505 | 38001 | 38011 | 38027 | 40103 |
| Origin | 8 | 8 | 8 | 8 | 8 | 8 | 8 | 8 | 8 | 8 | 9 |
| Loading start time | 8 | 10.1 | 14.5 | 12.7 | 13.6 | 14.9 | 18.6 | 16.3 | 1 | 13.7 | 15.9 |
| Loading cutoff time | 9.5 | 11.6 | 16 | 14.2 | 15.1 | 16.4 | 20.1 | 17.8 | 2.5 | 15.2 | 16.4 |
| Classification start time | 8.5 | 10.6 | 15 | 13.2 | 14.1 | 15.4 | 19.1 | 16.8 | 1.5 | 14.2 | 16.1 |
| Classification cutoff time | 10 | 12.1 | 16.5 | 14.7 | 15.6 | 16.9 | 20.6 | 18.3 | 3 | 15.7 | 16.9 |
| Departure time | 10.5 | 12.6 | 17 | 15.2 | 16.1 | 17.4 | 21.1 | 18.8 | 3.5 | 16.2 | 17.3 |
| Destination | 20 | 20 | 21 | 23 | 23 | 23 | 23 | 26 | 26 | 26 | 12 |
| Arrival time | 12.4 | 14.4 | 20 | 16.8 | 18.6 | 19.2 | 23.7 | 21.3 | 6 | 21 | 20.6 |
| Disassembly start time | 11.9 | 13.9 | 19.5 | 16.3 | 18.1 | 18.7 | 23.2 | 20.8 | 5.5 | 20.5 | 21 |
| Disassembly cutoff time | 13.5 | 15.7 | 21.2 | 18 | 20 | 20.5 | 24.7 | 22.5 | 7 | 22.3 | 21.6 |
| Unloading start time | 13.4 | 15.4 | 21 | 17.8 | 19.6 | 20.2 | 24.7 | 22.3 | 7 | 22 | 21.4 |
| Unloading cutoff time | 14.9 | 16.9 | 22.5 | 19.3 | 21.1 | 21.7 | 26.2 | 23.8 | 8.5 | 23.5 | 22 |
| Distance (unit: km) | 121 | 121 | 171 | 113 | 113 | 113 | 113 | 262 | 262 | 262 | 127 |
| Capacity (unit: ton) | 1546 | 994 | 1102 | 944 | 1239 | 1462 | 1009 | 856 | 1484 | 1135 | 864 |
| Population exposure (unit: 104 people) | 33.26 | 33.26 | 49.21 | 82.52 | 82.52 | 82.52 | 82.52 | 225.09 | 225.09 | 225.09 | 94.54 |
| Environmental capacity (unit: 104 ton) | 97.26 | 97.26 | 137.46 | 90.83 | 90.83 | 90.83 | 90.83 | 210.61 | 210.61 | 210.61 | 102.09 |
| Train No. | 30001 | 30003 | 30005 | 40081 | 47405 | 47406 | 39101 | 39109 | 39111 | 39113 | 39115 |
| Origin | 12 | 12 | 12 | 15 | 16 | 17 | 17 | 17 | 17 | 17 | 17 |
| Loading start time | 23.1 | 5.5 | 7.1 | 17.7 | 22.5 | 14.2 | 17.3 | 5.5 | 8.2 | 11.5 | 14.7 |
| Loading cutoff time | 24.6 | 7 | 8.6 | 19.2 | 24 | 15.7 | 18.8 | 7 | 9.7 | 13 | 16.2 |
| Classification start time | 23.6 | 6 | 7.6 | 18.2 | 23 | 14.7 | 17.8 | 6 | 8.7 | 12 | 15.2 |
| Classification cutoff time | 25.1 | 7.5 | 9.1 | 19.7 | 24.5 | 16.2 | 19.3 | 7.5 | 10.2 | 13.5 | 16.7 |
| Departure time | 25.6 | 8 | 9.6 | 20.2 | 25 | 16.7 | 19.8 | 8 | 10.7 | 14 | 17.2 |
| Destination | 6 | 6 | 6 | 17 | 17 | 16 | 18 | 18 | 18 | 18 | 18 |
| Arrival time | 28.1 | 10.8 | 12.1 | 22.3 | 25.9 | 17.6 | 21.2 | 9.4 | 12.2 | 15.4 | 18.7 |
| Disassembly start time | 27.6 | 10.3 | 11.6 | 21.8 | 25.4 | 17.1 | 20.7 | 8.9 | 11.7 | 14.9 | 18.2 |
| Disassembly cutoff time | 29.5 | 12 | 13.7 | 23.5 | 27 | 18.8 | 22.2 | 10.5 | 13.6 | 16.4 | 20 |
| Unloading start time | 29.1 | 11.8 | 13.1 | 23.3 | 26.9 | 18.6 | 22.2 | 10.4 | 13.2 | 16.4 | 19.7 |
| Unloading cutoff time | 30.6 | 13.3 | 14.6 | 24.8 | 28.4 | 20.1 | 23.7 | 11.9 | 14.7 | 17.9 | 21.2 |
| Distance (unit: km) | 121 | 12 | 12 | 67 | 52 | 52 | 44 | 44 | 44 | 44 | 44 |
| Capacity (unit: ton) | 1901 | 884 | 1392 | 857 | 1893 | 1107 | 2011 | 1892 | 1469 | 1242 | 1058 |
| Population exposure (unit: 104 people) | 55.41 | 5.49 | 5.49 | 31.66 | 20.10 | 20.10 | 11.34 | 20.79 | 20.79 | 20.79 | 20.79 |
| Environmental capacity (unit: 104 ton) | 97.26 | 9.65 | 9.65 | 53.86 | 41.80 | 41.80 | 35.37 | 35.37 | 35.37 | 35.37 | 35.37 |
| Train No. | 39181 | 39183 | 39185 | 33201 | 33203 | 46721 | 46723 | 82114/3 | 86662/1 | 46915 | 46947 |
| Origin | 17 | 17 | 17 | 20 | 20 | 24 | 24 | 24 | 24 | 25 | 25 |
| Loading start time | 22.7 | 1.5 | 13.7 | 18.3 | 1.9 | 22.5 | 4.8 | 2.5 | 7.9 | 8.6 | 5 |
| Loading cutoff time | 24.2 | 3 | 15.2 | 19.8 | 3.4 | 23 | 5.4 | 4 | 9.4 | 9.2 | 5.7 |
| Classification start time | 23.2 | 2 | 14.2 | 18.8 | 2.4 | 23 | 5.2 | 3 | 8.4 | 8.9 | 5.5 |
| Classification cutoff time | 24.7 | 3.5 | 15.7 | 20.3 | 3.9 | 23.5 | 6 | 4.5 | 9.9 | 9.6 | 6.2 |
| Departure time | 25.2 | 4 | 16.2 | 20.8 | 4.4 | 23.8 | 6.4 | 5 | 10.4 | 10 | 6.5 |
| Destination | 19 | 19 | 19 | 22 | 22 | 28 | 28 | 29 | 30 | 26 | 26 |
| Arrival time | 34.8 | 14.7 | 0.7 | 22.2 | 5.8 | 1.4 | 7 | 7 | 12.8 | 10.5 | 7 |
| Disassembly start time | 34.3 | 14.2 | 0.2 | 21.7 | 5.3 | 1.8 | 7.5 | 6.5 | 12.3 | 10.8 | 7.2 |
| Disassembly cutoff time | 36 | 15.9 | 1.9 | 23.4 | 7 | 2.8 | 8.1 | 8.2 | 14 | 11.5 | 7.8 |
| Unloading start time | 35.8 | 15.7 | 1.7 | 23.2 | 6.8 | 2.1 | 7.8 | 8 | 13.8 | 11.4 | 7.5 |
| Unloading cutoff time | 37.3 | 17.2 | 3.2 | 24.7 | 8.3 | 3 | 8.5 | 9.5 | 15.3 | 12 | 8.1 |
| Distance (unit: km) | 203 | 203 | 203 | 75 | 75 | 26 | 26 | 49 | 69 | 13 | 13 |
| Capacity (unit: ton) | 722 | 1284 | 1675 | 1156 | 1786 | 1023 | 1111 | 1987 | 1509 | 1160 | 1283 |
| Population exposure (unit: 104 people) | 52.32 | 52.32 | 52.32 | 45.10 | 45.10 | 18.99 | 18.99 | 35.78 | 35.57 | 9.49 | 9.49 |
| Environmental capacity (unit: 104 ton) | 163.18 | 163.18 | 163.18 | 60.29 | 60.29 | 20.90 | 20.90 | 39.39 | 55.47 | 10.45 | 10.45 |
| Train No. | 46951 | 46944 | 46821 | 46829 | 46833 | 46835 | 46839 | 43093 | 46981 | 46983 | 46981 |
| Origin | 25 | 26 | 28 | 28 | 28 | 28 | 28 | 29 | 31 | 31 | 31 |
| Loading start time | 21 | 1.2 | 18.5 | 3.9 | 7.5 | 8.6 | 11 | 10.9 | 20 | 7.5 | 19.5 |
| Loading cutoff time | 21.7 | 2 | 19.2 | 4.5 | 8.3 | 9.4 | 12 | 11.6 | 21 | 8.6 | 21 |
| Classification start time | 21.9 | 1.8 | 19 | 4.2 | 8 | 9 | 11.5 | 11.2 | 20.8 | 8.4 | 20.7 |
| Classification cutoff time | 22.3 | 2.4 | 19.5 | 5 | 8.8 | 10 | 12.4 | 12 | 21.7 | 9.2 | 21.6 |
| Departure time | 22.5 | 2.7 | 19.7 | 5.4 | 8.1 | 10.3 | 12.6 | 12.6 | 22 | 9.6 | 22 |
| Destination | 26 | 27 | 30 | 30 | 30 | 30 | 30 | 31 | 32 | 32 | 32 |
| Arrival time | 23 | 3.1 | 20.4 | 6.2 | 8.9 | 11 | 13.3 | 14 | 22.7 | 12.4 | 22.7 |
| Disassembly start time | 23.3 | 3.5 | 21 | 6.5 | 9.1 | 11.4 | 13.7 | 14.5 | 30 | 12.8 | 23 |
| Disassembly cutoff time | 23.9 | 4.1 | 21.5 | 7.1 | 9.8 | 12.3 | 14.4 | 15.2 | 30.8 | 14 | 23.8 |
| Unloading start time | 23.7 | 3.9 | 21.4 | 6.7 | 9.5 | 11.7 | 14 | 14.8 | 30.4 | 13.4 | 23.4 |
| Unloading cutoff time | 24.2 | 4.6 | 22.2 | 7.5 | 10.4 | 12.7 | 15 | 15.8 | 31.4 | 15 | 24.2 |
| Distance (unit: km) | 13 | 8 | 53 | 53 | 53 | 53 | 53 | 88 | 10 | 10 | 10 |
| Capacity (unit: ton) | 879 | 1930 | 1036 | 2143 | 778 | 1456 | 1220 | 1696 | 1987 | 972 | 762 |
| Population exposure (unit: 104 people) | 9.49 | 5.84 | 27.32 | 27.32 | 27.32 | 27.32 | 27.32 | 45.36 | 4.94 | 4.94 | 4.94 |
| Environmental capacity (unit: 104 ton) | 10.45 | 6.43 | 42.60 | 42.60 | 42.60 | 42.60 | 42.60 | 70.74 | 8.04 | 8.04 | 8.04 |
References
- Zhao, J.; Huang, L.X.; Lee, D.H.; Peng, Q.Y. Improved approaches to the network design problem in regional hazardous waste management systems. Transp. Res. Part E Logist. Transp. Rev. 2016, 8, 52–75. [Google Scholar] [CrossRef]
- Tarantilis, C.D.; Kiranoudis, C.T. Using the vehicle routing problem for the transportation of hazardous materials. Oper. Res. 2001, 1, 67–78. [Google Scholar] [CrossRef]
- Bubbico, R.; Maschio, G.; Mazzarotta, B.; Milazzo, M.F.; Parisi, E. Risk management of road and rail transport of hazardous materials in Sicily. J. Loss Prev. Proc. 2006, 19, 32–38. [Google Scholar] [CrossRef]
- Chu, Q.Z.; Zhang, J.Y.; Xie, Z.Q. Road Network Design for Hazardous Materials Transportation Based on Bi-level Programming. J. Chongqing Jiaotong Univ. (Nat. Sci.) 2010, 29, 597–603. [Google Scholar]
- Wu, Z.Z.; Zhang, S.Z.; Zhang, Y.; Shi, C.; Liu, N.; Yang, G.L. Statistical analysis of hazardous chemicals accidents occurring in China during 2006–2010. J. Saf. Sci. Technol. 2011, 7, 5–9. [Google Scholar]
- Ren, C.X.; Wu, Z.Z. Probe into methods of optimal road transportation routing for hazardous materials. China Saf. Sci. J. 2006, 16, 129–134. [Google Scholar]
- Androutsopoulos, K.N.; Zografos, K.G. Solving the bicriterion routing and scheduling problem for hazardous materials distribution. Transp. Res. Part C Emerg. Technol. 2010, 18, 713–726. [Google Scholar] [CrossRef] [Green Version]
- List, G.F.; Mirchandani, P.B.; Turnquist, M.A.; Zografos, K.G. Modeling and analysis for hazardous materials transportation: Risk analysis, routing/scheduling and facility location. Transp. Sci. 1991, 25, 100–114. [Google Scholar] [CrossRef]
- Ren, C.X.; Wu, Z.Z. On route-choice analysis of hazardous materials transportation. J. Saf. Environ. 2006, 6, 84–88. [Google Scholar]
- Verter, V.; Kara, B.Y. A path-based approach for hazmat transport network design. Manag. Sci. 2008, 54, 29–40. [Google Scholar] [CrossRef]
- Erkut, E.; Gzara, F. Solving the hazmat transport network design problem. Comput. Oper. Res. 2008, 35, 2234–2247. [Google Scholar] [CrossRef] [Green Version]
- Kara, B.Y.; Verter, V. Designing a road network for hazardous materials transportation. Transp. Sci. 2004, 38, 188–196. [Google Scholar] [CrossRef]
- Erkut, E.; Alp, O. Designing a road network for hazardous materials shipments. Comput. Oper. Res. 2007, 34, 1389–1405. [Google Scholar] [CrossRef]
- Boyer, O.; Sai Hong, T.; Pedram, A.; Mohd Yusuff, R.B.; Zulkifli, N. A mathematical model for the industrial hazardous waste location-routing problem. J. Appl. Math. 2013, 2013, 1–10. [Google Scholar] [CrossRef]
- Alumur, S.; Kara, B.Y. A new model for the hazardous waste location-routing problem. Comput. Oper. Res. 2007, 34, 1406–1423. [Google Scholar] [CrossRef]
- Zhao, J.; Verter, V. A bi-objective model for the used oil location-routing problem. Comput. Oper. Res. 2015, 62, 157–168. [Google Scholar] [CrossRef]
- Shuai, B.; Zhao, J. Bi-objective 0–1 linear programming model for combined location–routing problem in hazardous waste logistics system. J. Southwest Jiaotong Univ. 2011, 46, 326–332. [Google Scholar]
- Helander, M.E.; Melachrinoudis, E. Facility location and reliable route planning in hazardous material transportation. Transp. Sci. 1997, 31, 216–226. [Google Scholar] [CrossRef]
- Giannikos, I. A multiobjective programming model for locating treatment sites and routing hazardous wastes. Eur. J. Oper. Res. 1998, 104, 333–342. [Google Scholar] [CrossRef]
- Zografros, K.G.; Samara, S. Combined location-routing model for hazardous waste transportation and disposal. Transp. Res. Rec. J. Transp. Res. Board 1989, 1245, 52–59. [Google Scholar]
- Bubbico, R.; Di Cave, S.; Mazzarotta, B. Risk analysis for road and rail transport of hazardous materials: A simplified approach. J. Loss Prevent. Proc. 2004, 17, 477–482. [Google Scholar] [CrossRef]
- Xie, Y.; Lu, W.; Wang, W.; Quadrifoglio, L. A multimodal location and routing model for hazardous materials transportation. J. Hazard. Mater. 2012, 227, 135–141. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Y.; Zhang, X.; Rong, Y.; Zhang, Z. A Multimodal Location and Routing Model for Hazardous Materials Transportation based on Multi-commodity Flow Model. Procedia-Soc. Behav. Sci. 2014, 138, 791–799. [Google Scholar] [CrossRef]
- Verma, M.; Verter, V. A lead-time based approach for planning rail–truck intermodal transportation of dangerous goods. Eur. J. Oper. Res. 2010, 202, 696–706. [Google Scholar] [CrossRef]
- Verma, M.; Verter, V.; Zufferey, N. A bi-objective model for planning and managing rail-truck intermodal transportation of hazardous materials. Transp. Res. Part E Logist. Transp. Rev. 2012, 48, 132–149. [Google Scholar] [CrossRef]
- Sun, Y.; Lang, M.X. Modeling the Multicommodity Multimodal Routing Problem with Schedule-Based Services and Carbon Dioxide Emission Costs. Math. Probl. Eng. 2015, 2015, 406218. [Google Scholar] [CrossRef]
- Erkut, E.; Tjandra, S.A.; Verter, V. Hazardous materials transportation. In Handbooks in Operations Research and Management Science; Elsevier: Amsterdam, The Netherlands, 2007; Volume 14, pp. 539–621. [Google Scholar]
- Ding, X.W.; Wang, S.L.; Xu, G.Q. A review of studies on the discharging dispersion of flammable and toxic gases. Chem. Ind. Eng. 1999, 16, 118–122. [Google Scholar]
- Verma, M.; Verter, V. Railroad transportation of dangerous goods: Population exposure to airborne toxins. Comput. Oper. Res. 2007, 34, 1287–1303. [Google Scholar] [CrossRef]
- Zhao, J. The Location-Routing Problem of Hazardous Waste Recycling Considering the Environmental Risk. Ph.D. Thesis, Southwest Jiaotong University, Chengdu, China, 2 November 2015. [Google Scholar]
- Sun, Y.; Lang, M.; Wang, D. Optimization models and solution algorithms for freight routing planning problem in the multi-modal transportation networks: A review of the state-of-the-art. Open Civ. Eng. J. 2015, 9, 714–723. [Google Scholar] [CrossRef]
- Sun, Y.; Lang, M.X. Bi-objective optimization for multi-modal transportation routing planning problem based on Pareto optimality. J. Ind. Eng. Manag. 2015, 8, 1195–1217. [Google Scholar] [CrossRef]
- Sheu, J.B. A coordinated reverse logistics system for regional management of multi-source hazardous wastes. Comput. Oper. Res. 2007, 34, 1442–1462. [Google Scholar] [CrossRef]
- Samanlioglu, F. A multi-objective mathematical model for the industrial hazardous waste location-routing problem. Eur. J. Oper. Res. 2013, 226, 332–340. [Google Scholar] [CrossRef]
- Rakas, J.; Teodorović, D.; Kim, T. Multi-objective modeling for determining location of undesirable facilities. Transp. Res. Part D Transp. Environ. 2004, 9, 125–138. [Google Scholar] [CrossRef]
- Zhang, J.R.; Li, P.; Wang, W.X. Analysis on diffusion risk of leakage accident for liquid chlorine in transportation. J. Saf. Sci. Technol. 2015, 11, 104–108. [Google Scholar]
- Chen, G.H.; Liang, T.; Zhang, H.; Yan, W.W.; Chen, Q.G. Quantitative Risk Assessment of Liquefied Chlorine Leakage Accident via SAFETI. J. South China Univ. Technol. (Nat. Sci. Ed.) 2006, 35, 103–108. [Google Scholar]
- Ren, C.X.; Wu, Z.Z. Progress of risk assessment and optical routing for hazardous materials transportation by road. J. Saf. Environ. 2007, 7, 127–131. [Google Scholar]






| No. | Origin | Destination | Volume (Unit: Ton) | Release Time | Due Date |
|---|---|---|---|---|---|
| 1 | 1 | 33 | 270 | 0 | 9.5 |
| 2 | 1 | 34 | 120 | 8 | 14 |
| 3 | 1 | 36 | 60 | 5 | 26 |
| 4 | 1 | 39 | 180 | 14 | 40 |
| 5 | 1 | 40 | 120 | 6 | 25 |
| 6 | 1 | 41 | 90 | 14 | 39 |
| 7 | 1 | 42 | 120 | 28 | 47 |
| 8 | 1 | 43 | 210 | 32.5 | 40 |
| 9 | 1 | 44 | 270 | 24.5 | 48 |
| 10 | 1 | 45 | 90 | 1 | 25 |
| 11 | 2 | 33 | 60 | 0 | 58 |
| 12 | 2 | 34 | 180 | 25 | 60 |
| 13 | 2 | 35 | 270 | 8 | 19 |
| 14 | 2 | 36 | 250 | 13.9 | 39 |
| 15 | 2 | 37 | 90 | 21.5 | 45.5 |
| 16 | 2 | 38 | 180 | 27 | 41 |
| 17 | 2 | 41 | 210 | 30 | 42 |
| 18 | 3 | 35 | 150 | 3.2 | 19 |
| 19 | 3 | 44 | 120 | 23 | 41 |
| 20 | 3 | 44 | 210 | 28 | 42 |
| 21 | 3 | 45 | 180 | 8.5 | 23 |
| 22 | 4 | 35 | 120 | 18 | 30.5 |
| 23 | 4 | 44 | 210 | 12.5 | 31 |
| 24 | 4 | 45 | 240 | 0 | 9 |
| 25 | 4 | 45 | 270 | 5 | 15 |
| Total Variables | Integer Variables | Constraints |
|---|---|---|
| 22,403 | 8925 | 60,006 |
| No. | Multimodal Routes | Arrival Time at Destination |
|---|---|---|
| 1 | 1 33 | 5 |
| 2 | 1 34 | 11.3 |
| 3 | 1 36 | 8.2 |
| 4 | 1 9 12 16 39 | 36 |
| 5 | 1 6 17 18 40 | 23 |
| 6 | 1 9 12 16 41 | 37.3 |
| 7 | 1 42 | 30.3 |
| 8 | 1 43 | 34.8 |
| 9 | 1 8 26 44 | 47.6 |
| 10 | 1 8 26 45 | 24.5 |
| 11 | 2 6 8 20 22 33 | 8.7 |
| 12 | 2 8 21 34 | 45.1 |
| 13 | 2 35 | 11 |
| 14 | 2 36 | 16.9 |
| 15 | 2 37 | 23.4 |
| 16 | 2 38 | 28.8 |
| 17 | 2 12 16 41 | 37.3 |
| 18 | 3 35 | 5.9 |
| 19 | 3 29 31 44 | 39.1 |
| 20 | 3 29 31 44 | 39.1 |
| 21 | 3 45 | 10.8 |
| 22 | 4 35 | 20.8 |
| 23 | 4 44 | 14.4 |
| 24 | 4 45 | 2.8 |
| 25 | 4 45 | 7.8 |
| Performance | Scenario 1: Min Objective 1 | Scenario 2: Min Objective 2 |
|---|---|---|
| Objective 1 | 850,192 * | 906,037 |
| Objective 2 | 621,099 | 506,362 * |
| Environmental risk | 0.553 | 0.459 |
| Solver state | Global opt | Global opt |
| Computational time | 2 min 51 s ** | 2 min 38 s ** |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Lang, M.; Wang, D. Bi-Objective Modelling for Hazardous Materials Road–Rail Multimodal Routing Problem with Railway Schedule-Based Space–Time Constraints. Int. J. Environ. Res. Public Health 2016, 13, 762. https://doi.org/10.3390/ijerph13080762
Sun Y, Lang M, Wang D. Bi-Objective Modelling for Hazardous Materials Road–Rail Multimodal Routing Problem with Railway Schedule-Based Space–Time Constraints. International Journal of Environmental Research and Public Health. 2016; 13(8):762. https://doi.org/10.3390/ijerph13080762
Chicago/Turabian StyleSun, Yan, Maoxiang Lang, and Danzhu Wang. 2016. "Bi-Objective Modelling for Hazardous Materials Road–Rail Multimodal Routing Problem with Railway Schedule-Based Space–Time Constraints" International Journal of Environmental Research and Public Health 13, no. 8: 762. https://doi.org/10.3390/ijerph13080762