
Torque Distribution Characteristics of a Novel Double-Stator Permanent Magnet Generator Integrated with a Magnetic Gear

 and
and
Abstract
:1. Introduction
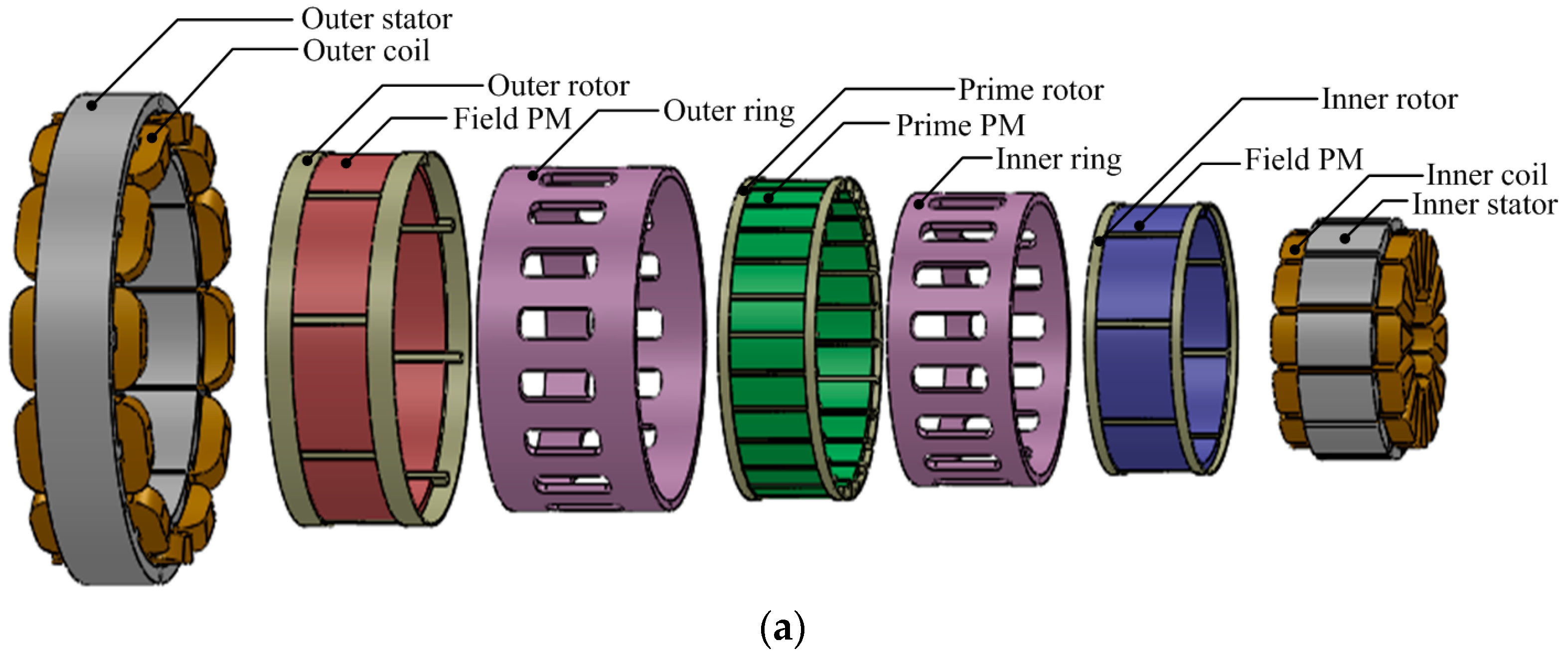
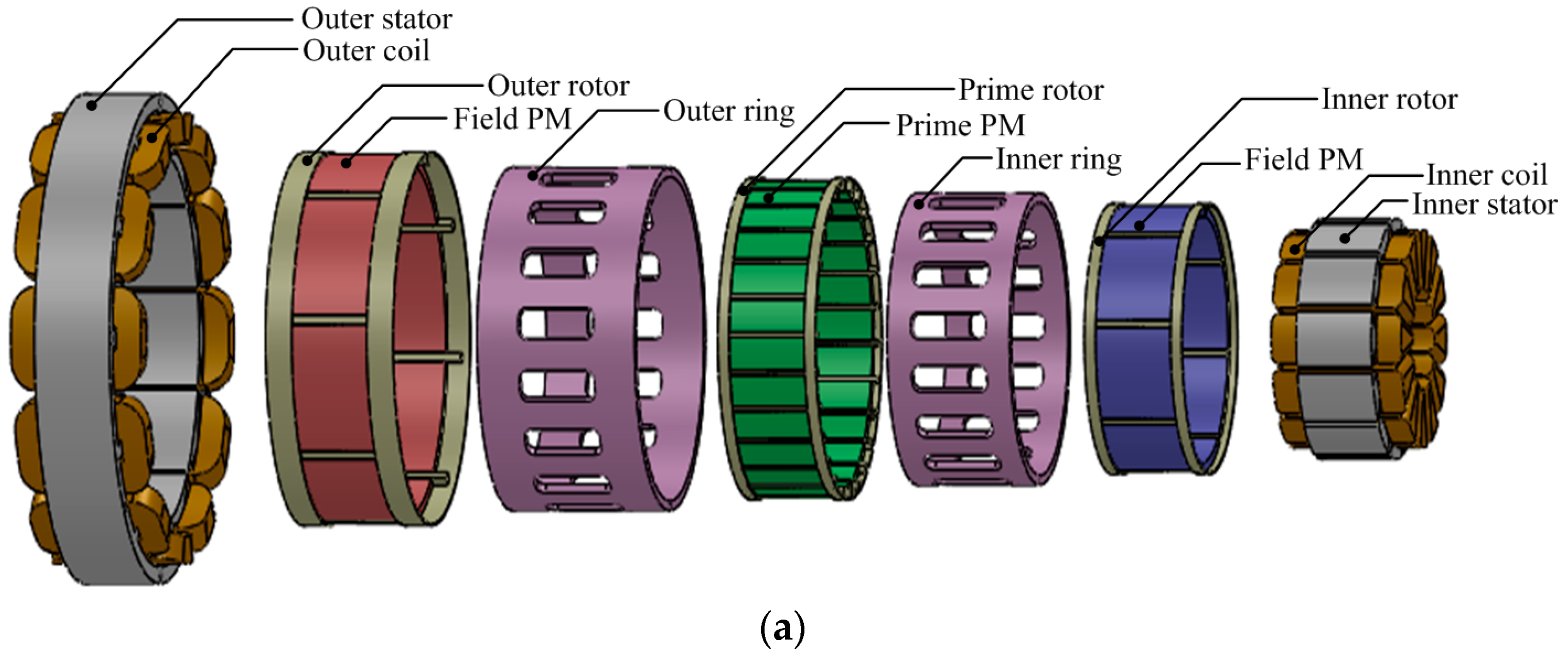
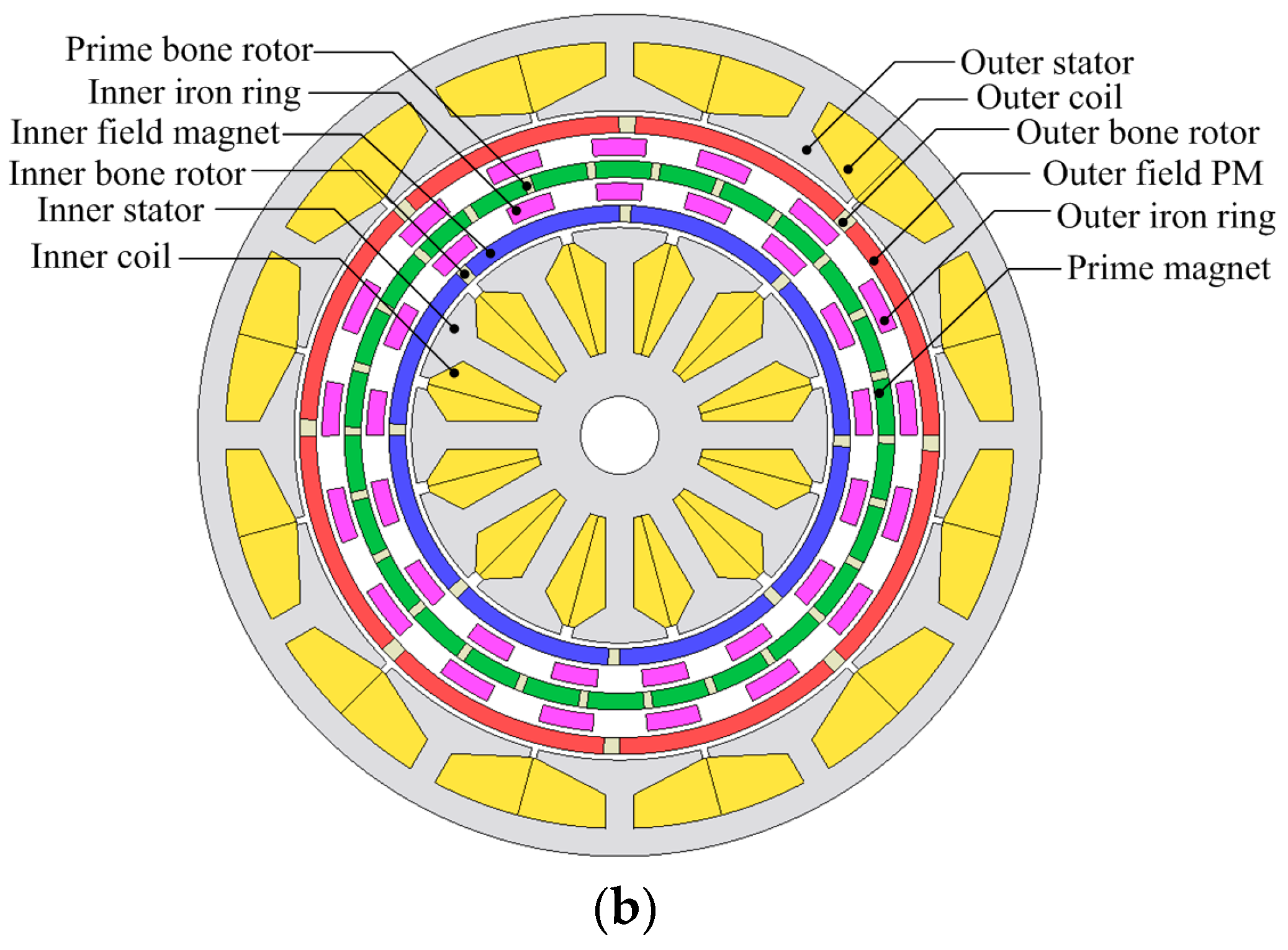
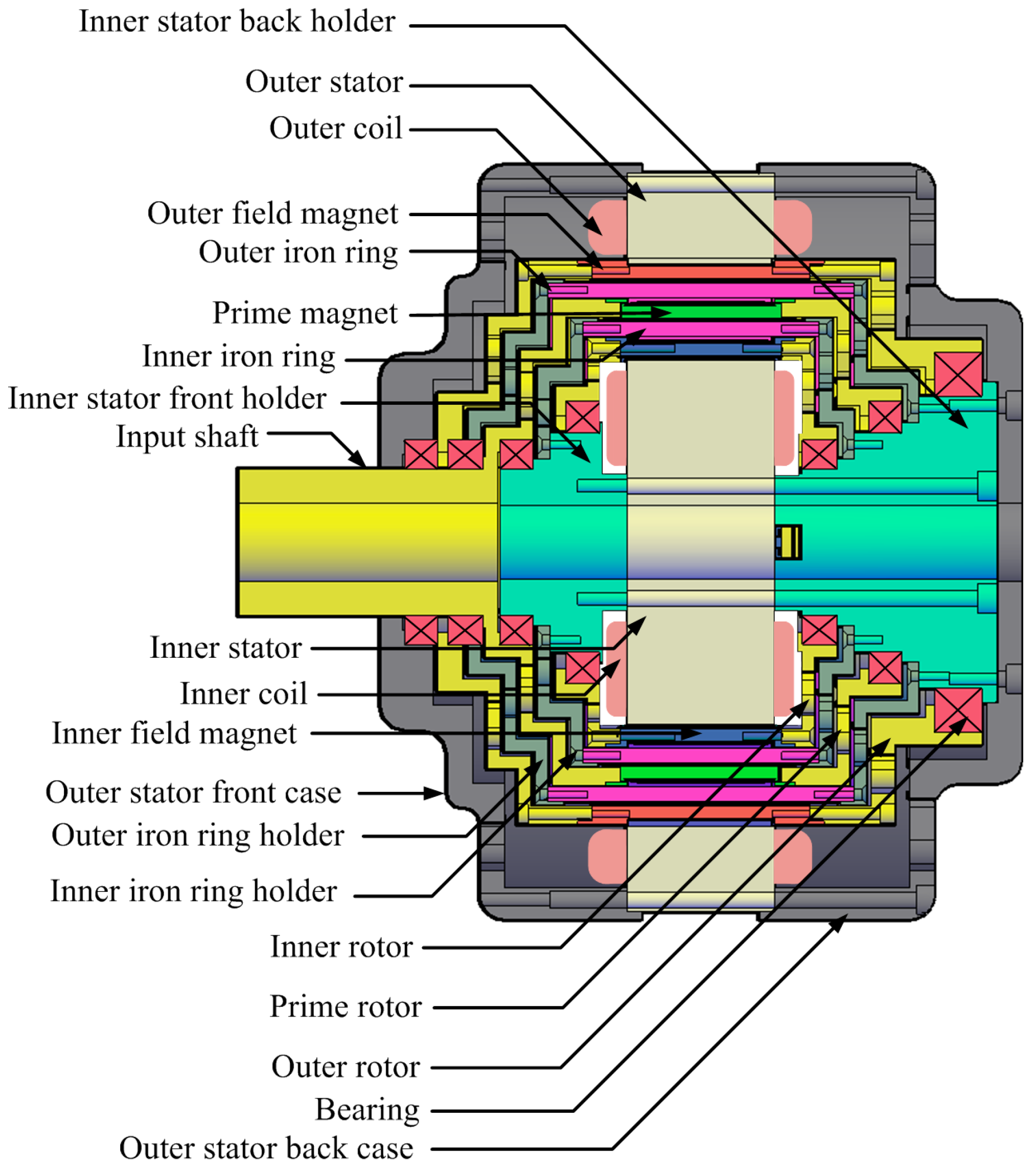
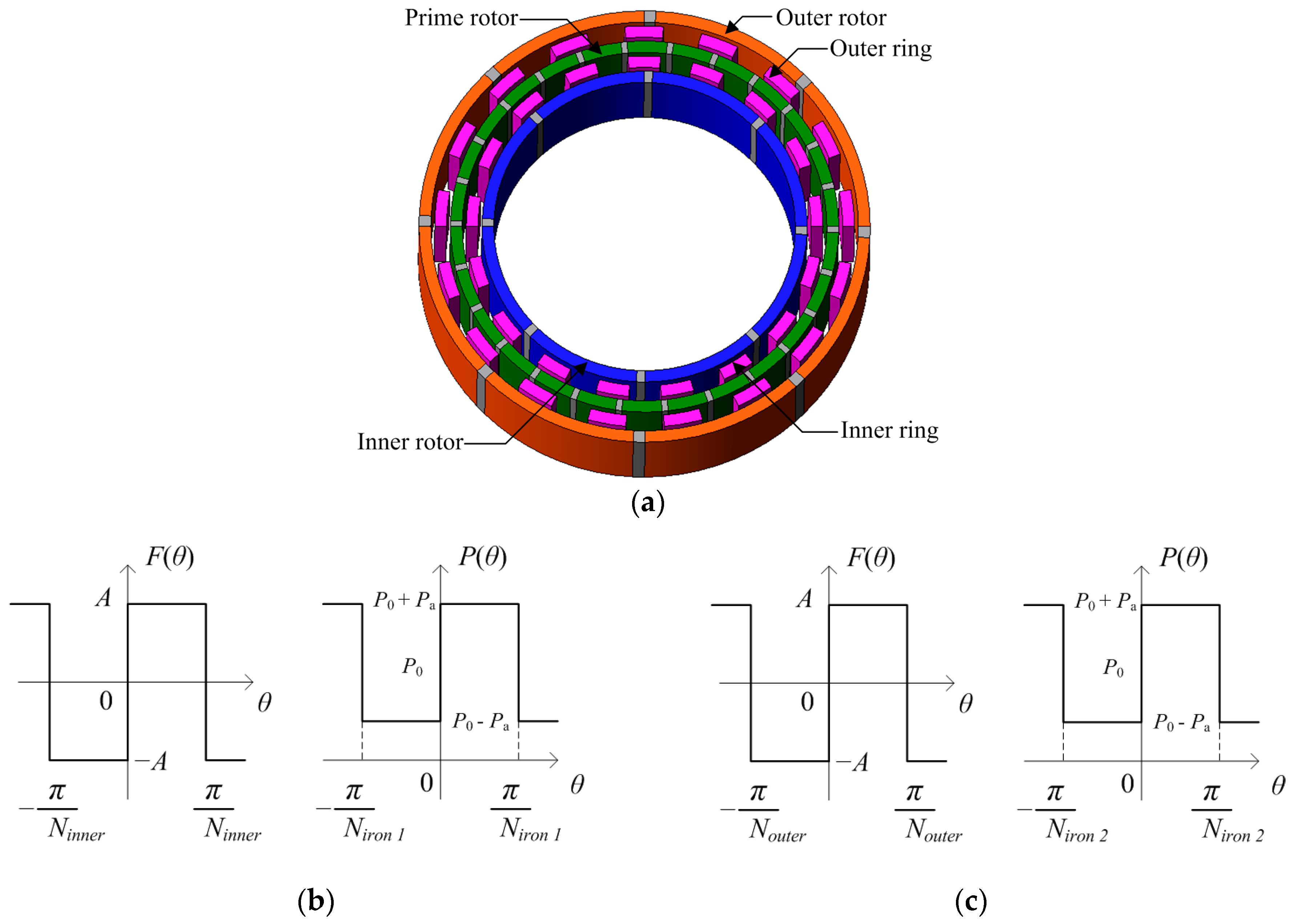
2. Proposed Structure and Machine Operating Principle
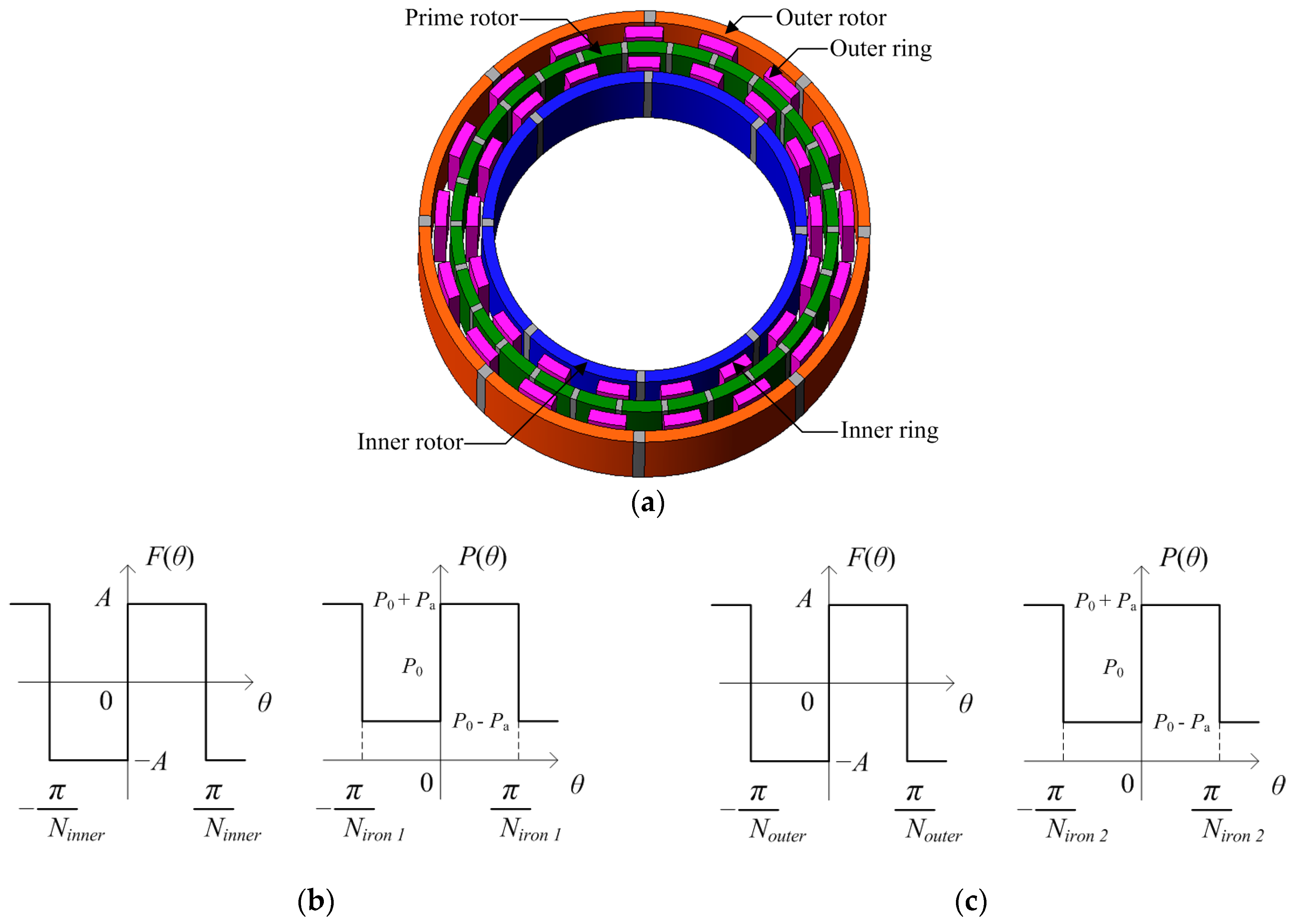
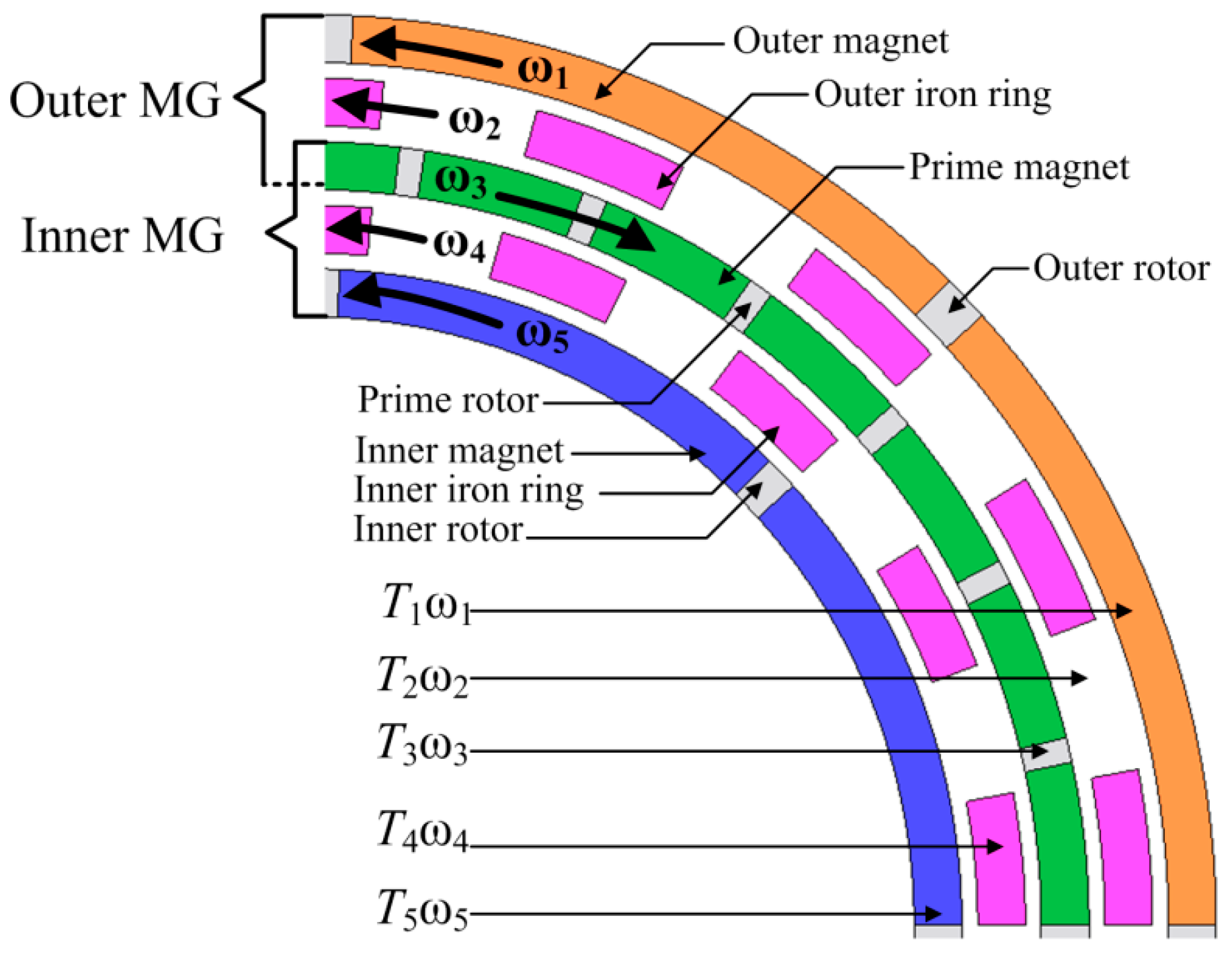
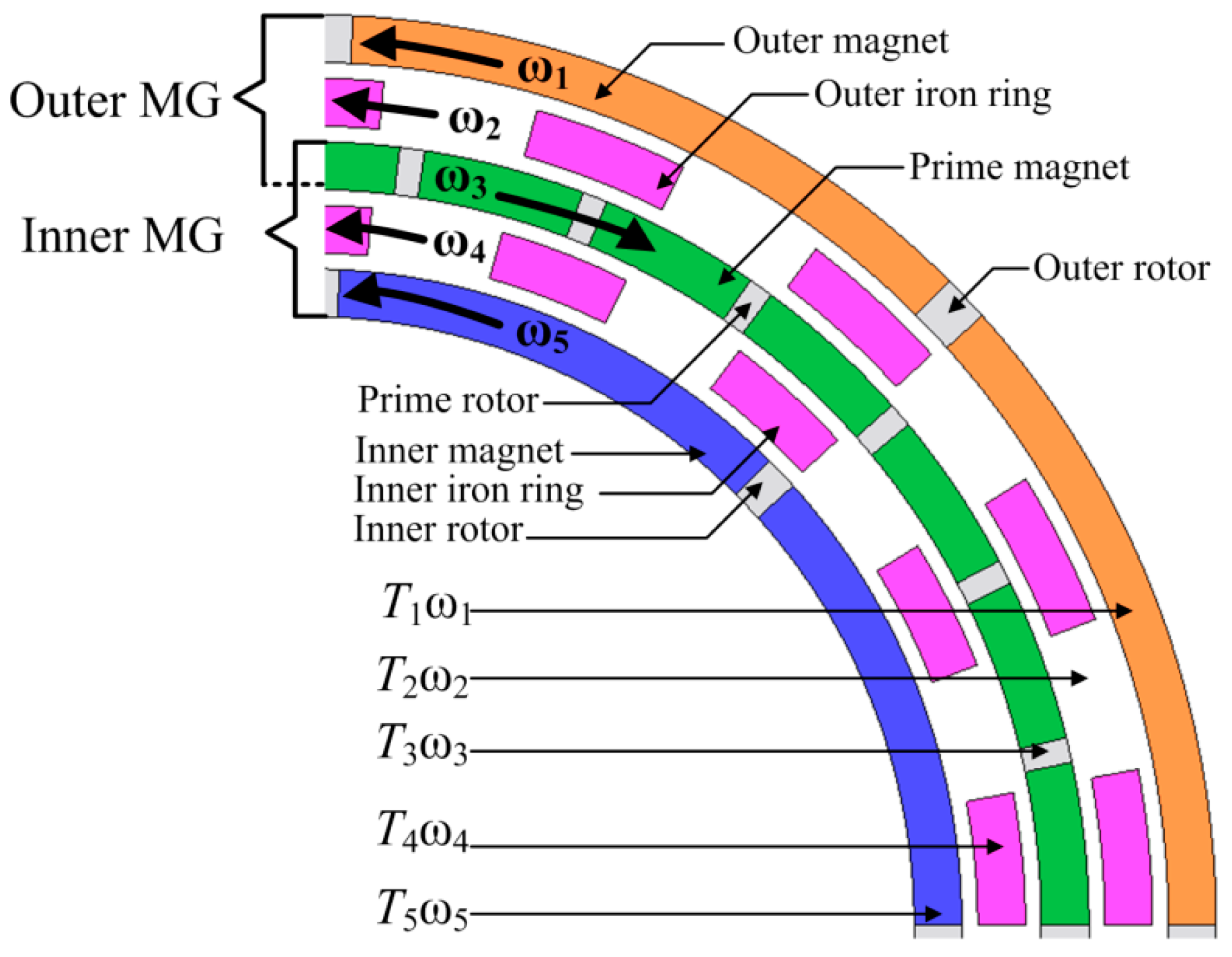
2.1. Triple Rotor Magnetic Gear Operating Principle
2.2. Transmission Torque
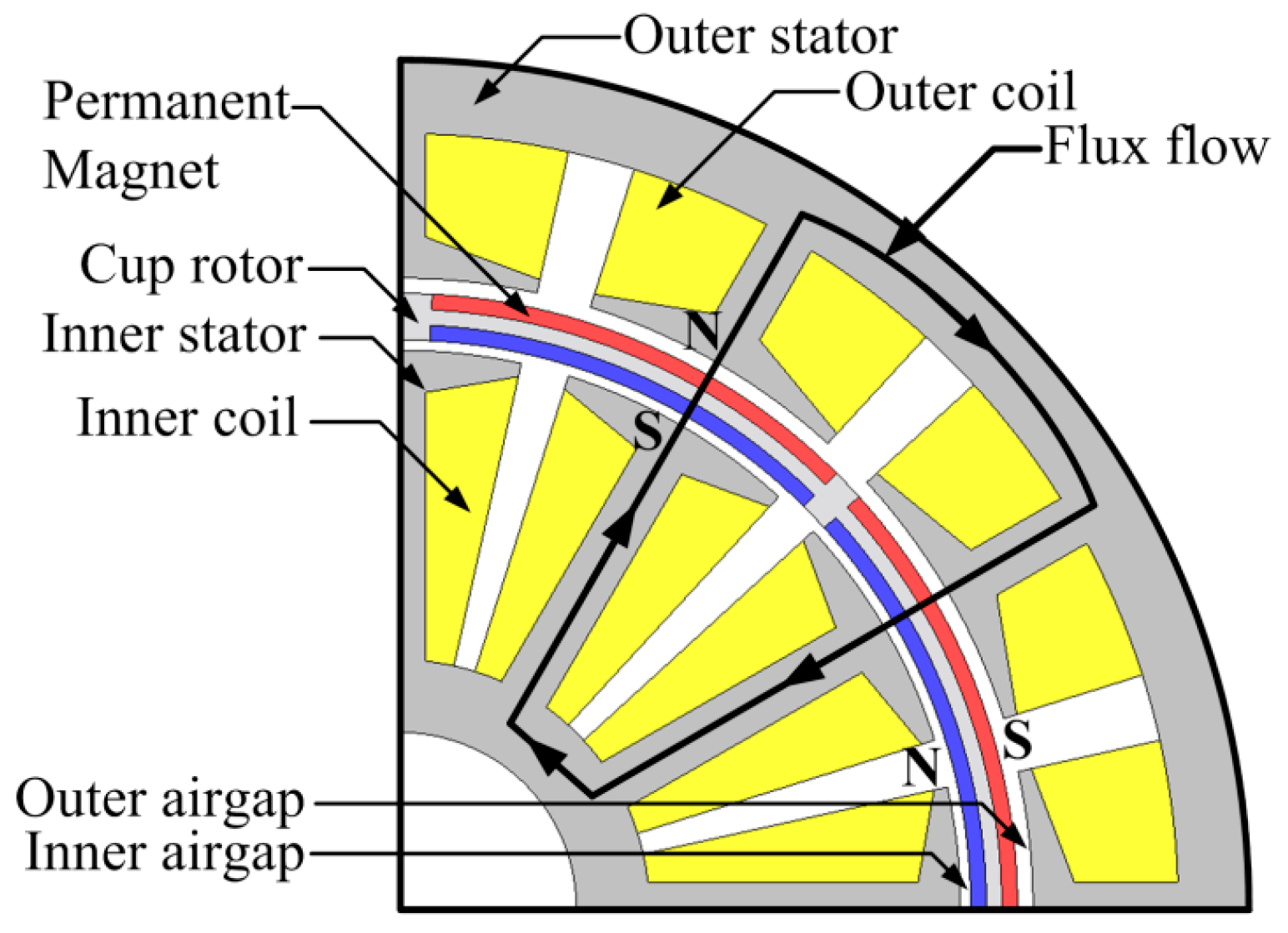
2.3. Double-Stator Permanent Magnet Machine Operating Principle
2.4. Cogging Torque Characteristics
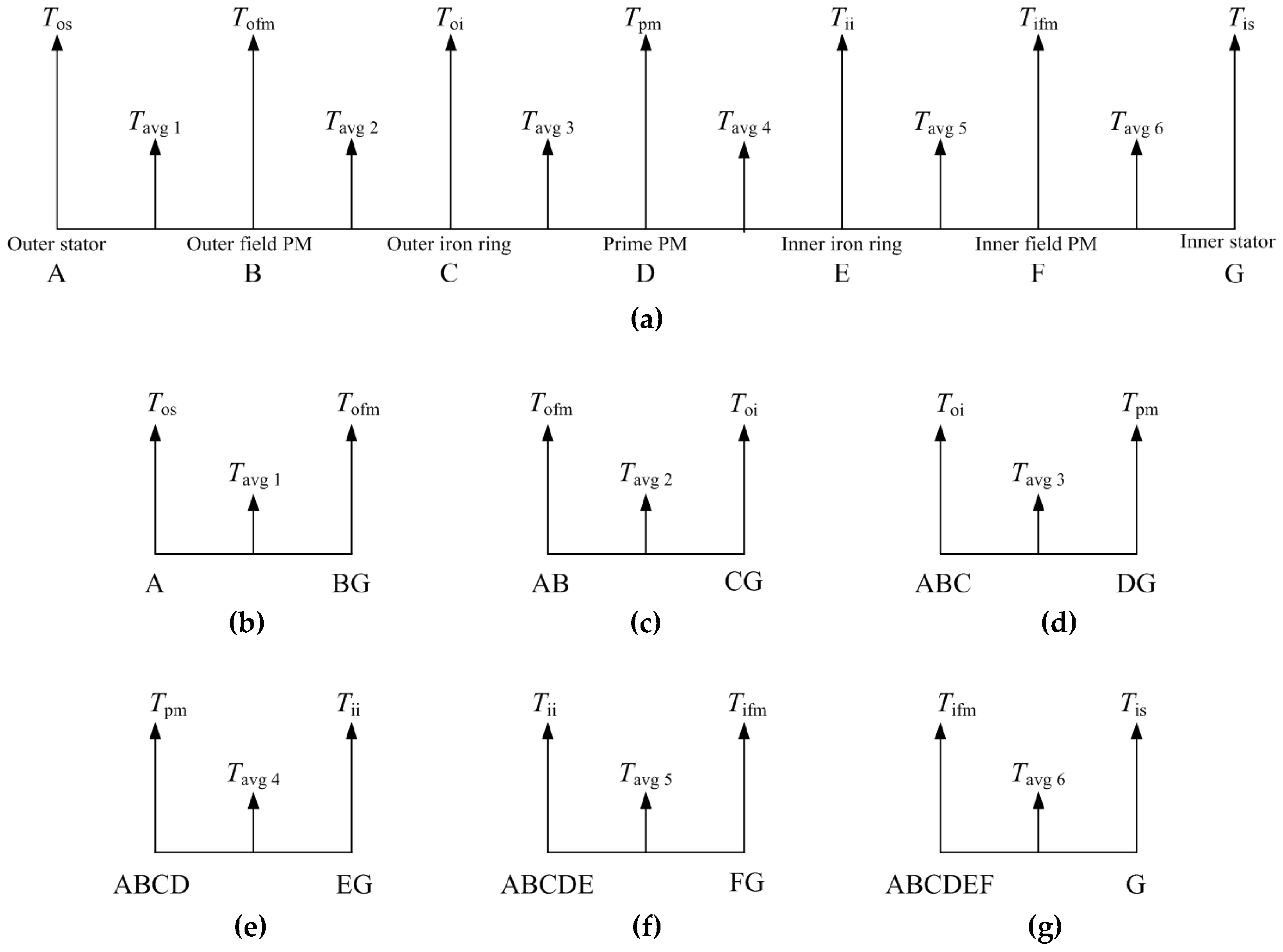
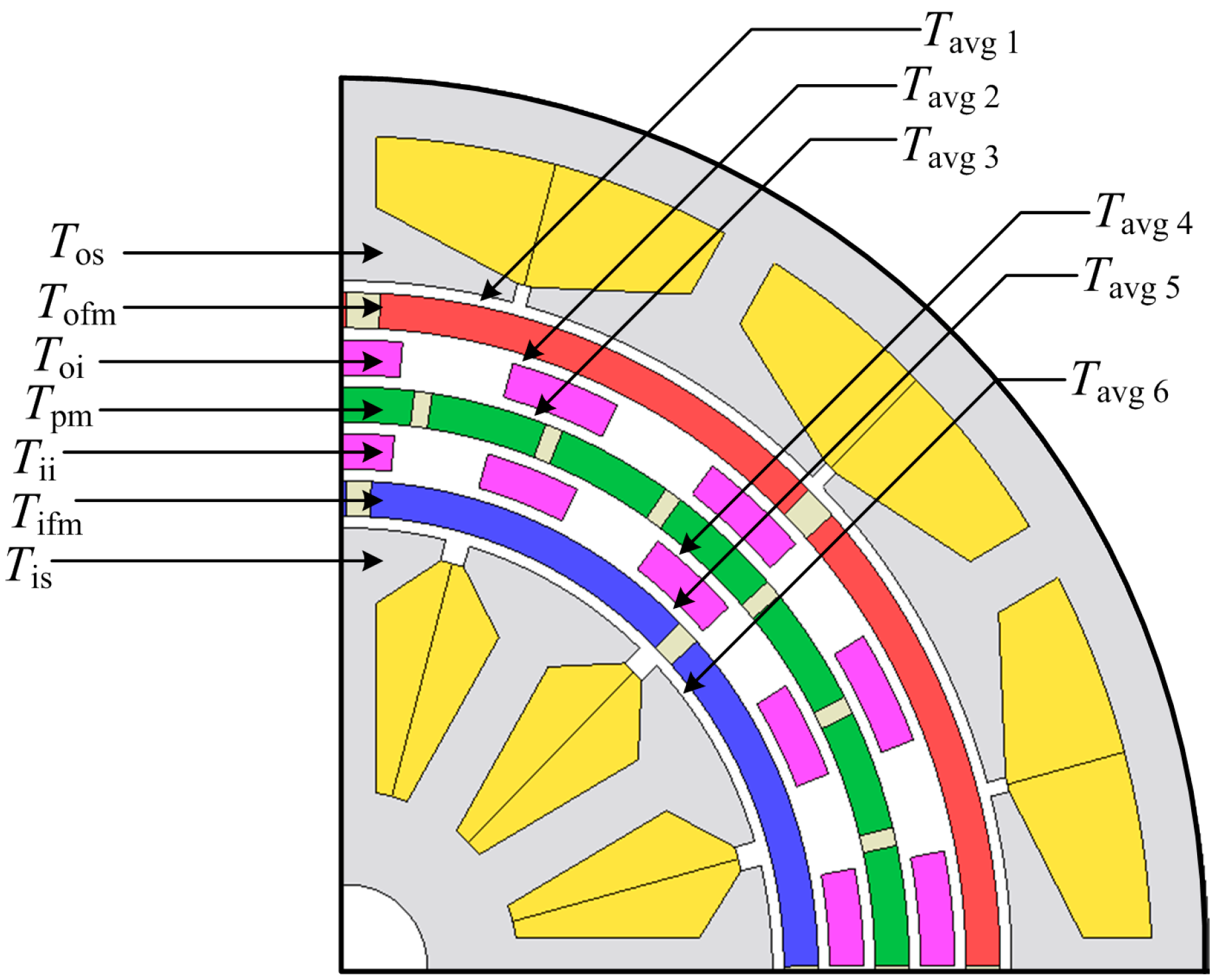
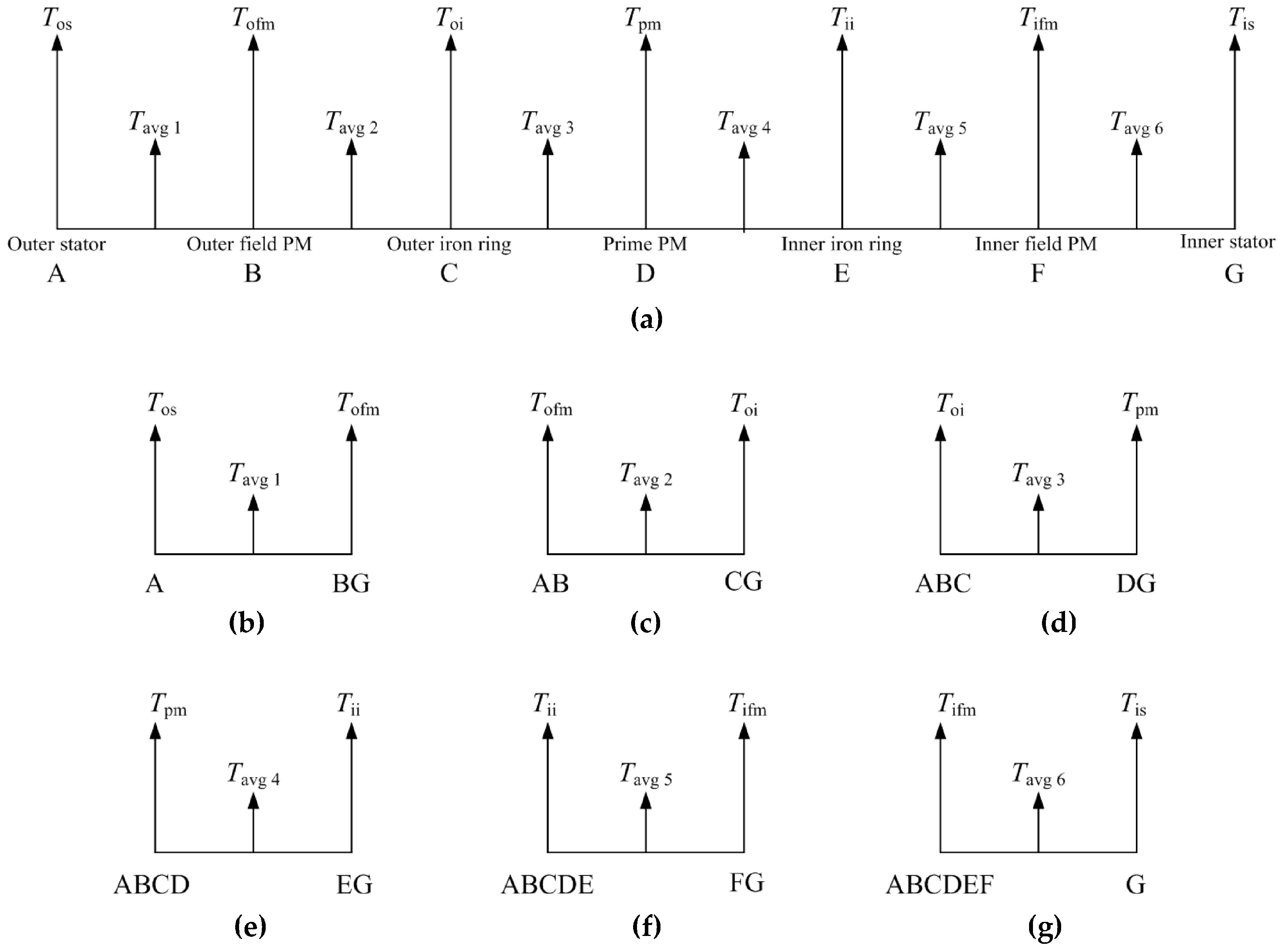
2.5. Torque Distribution Map and Analysis
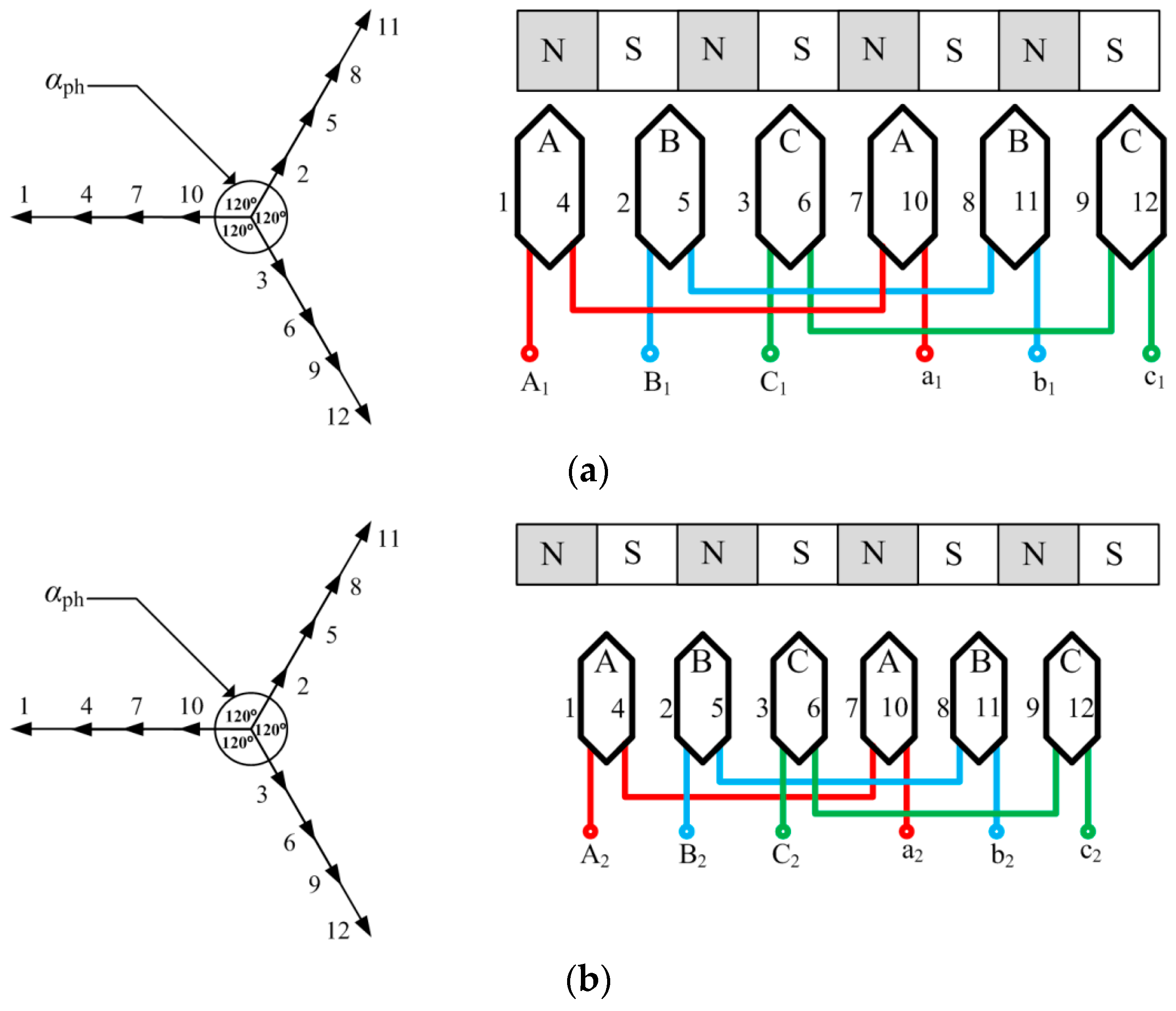
2.6. Stator Slots and Winding Design
3. Finite Element Method
4. Results and Discussion
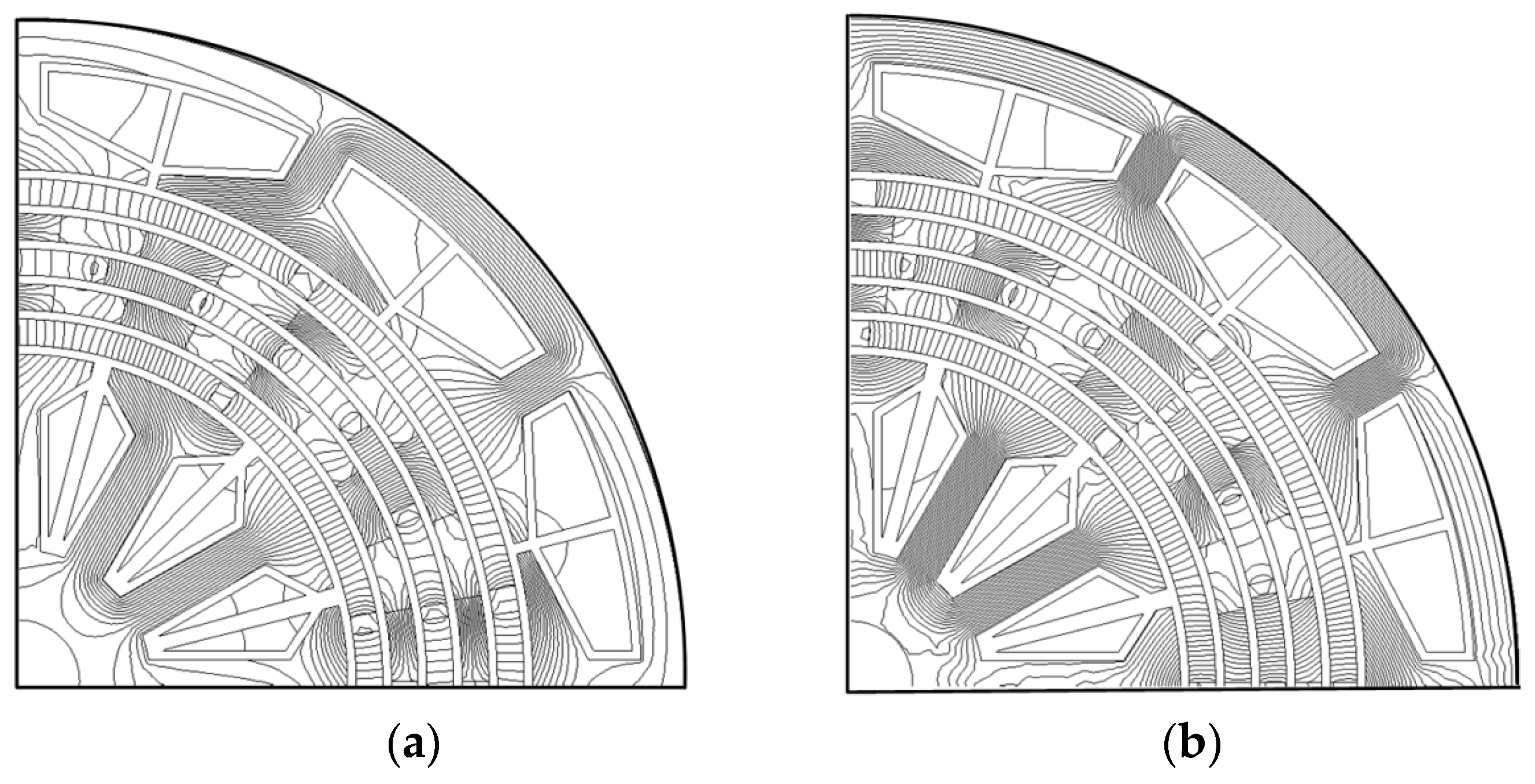
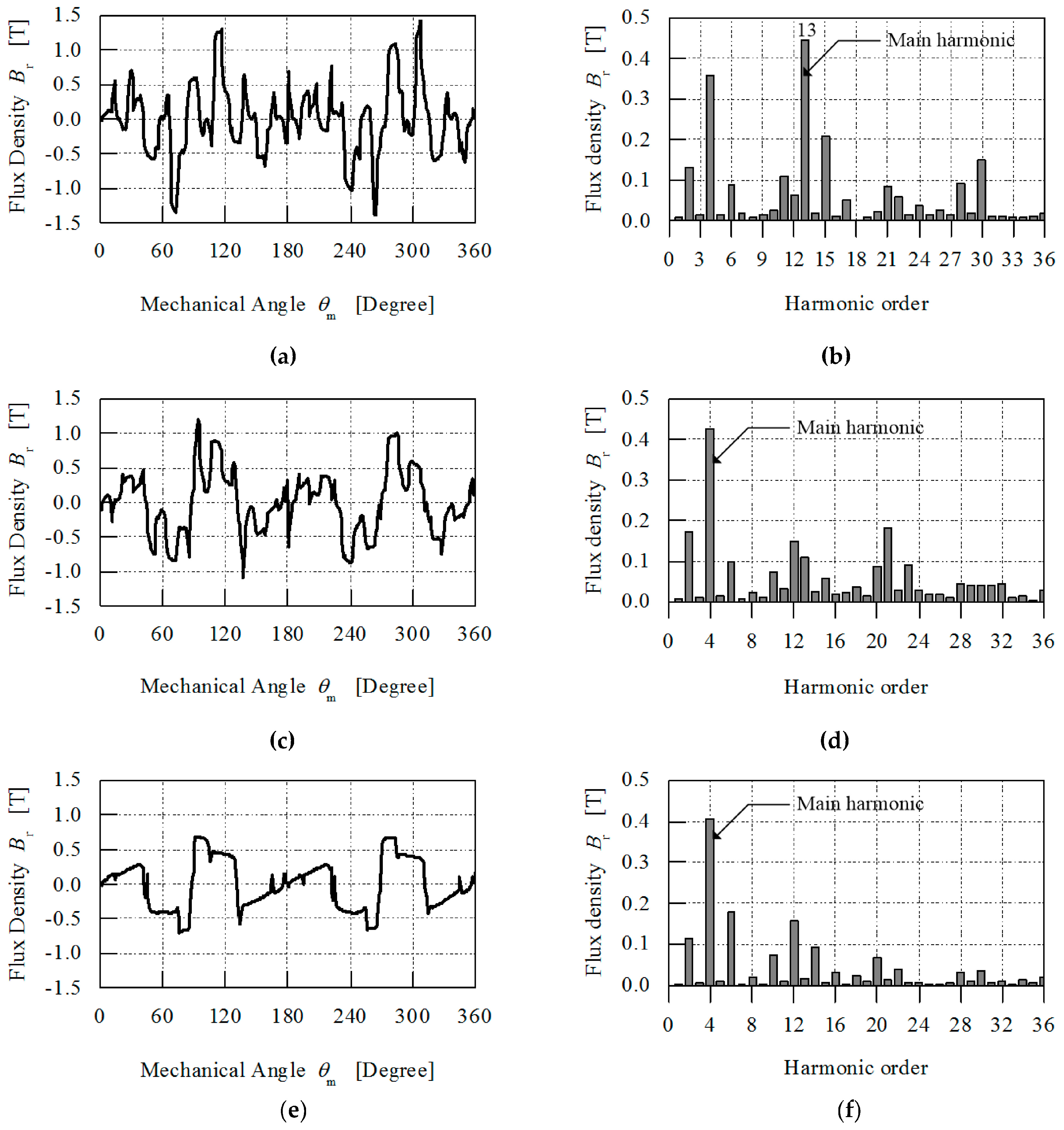
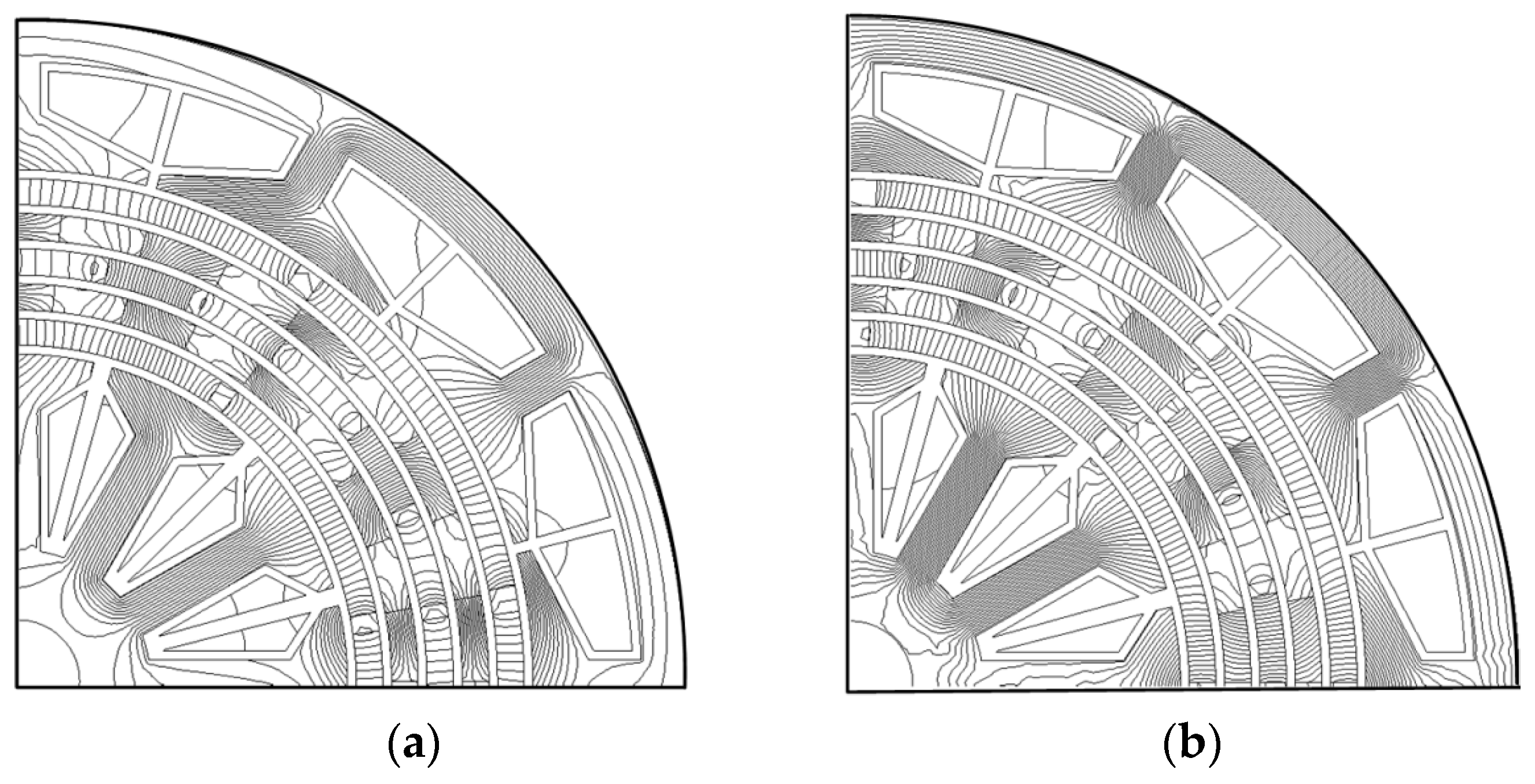
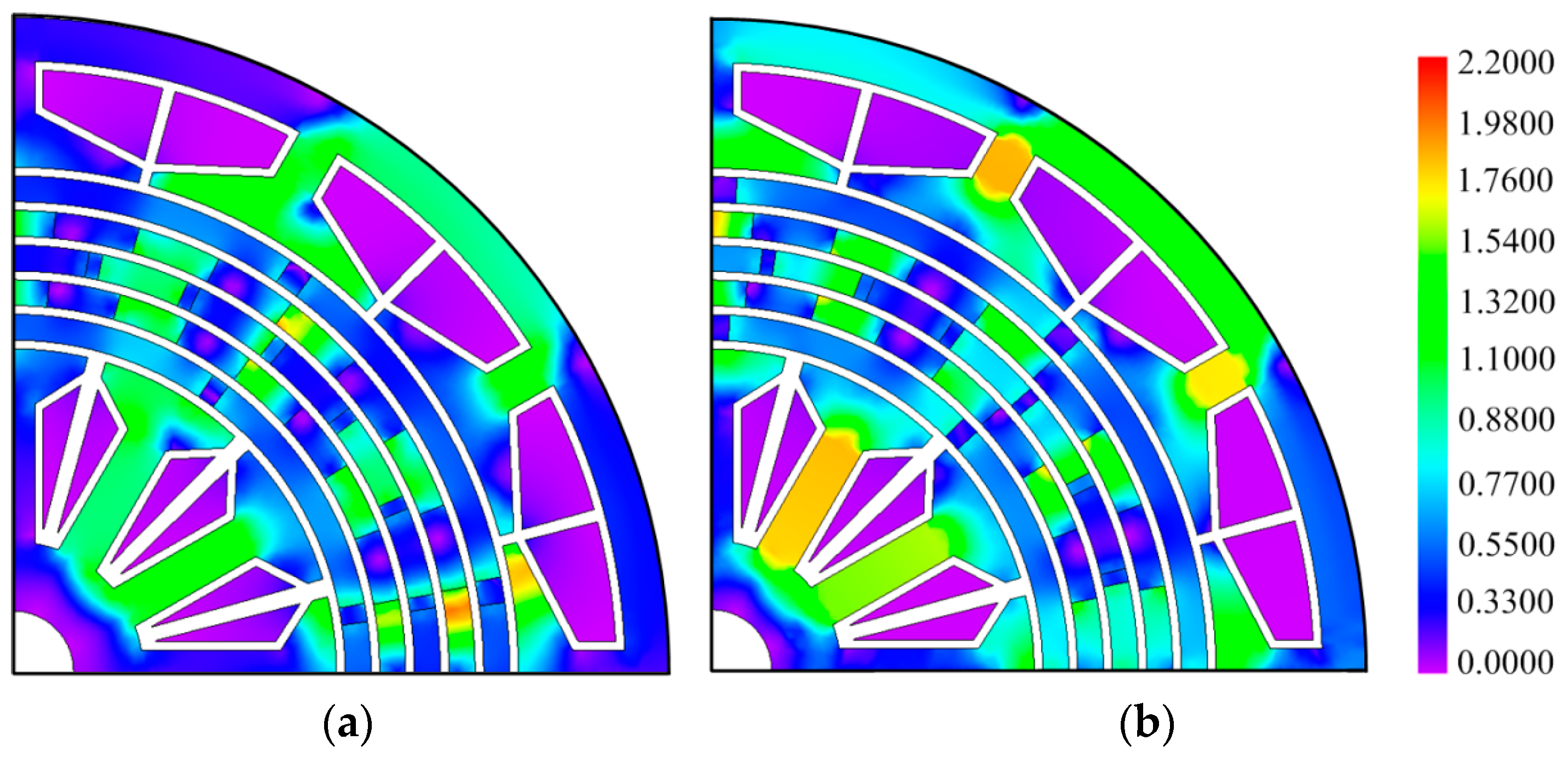
4.1. Flux Density Distribution
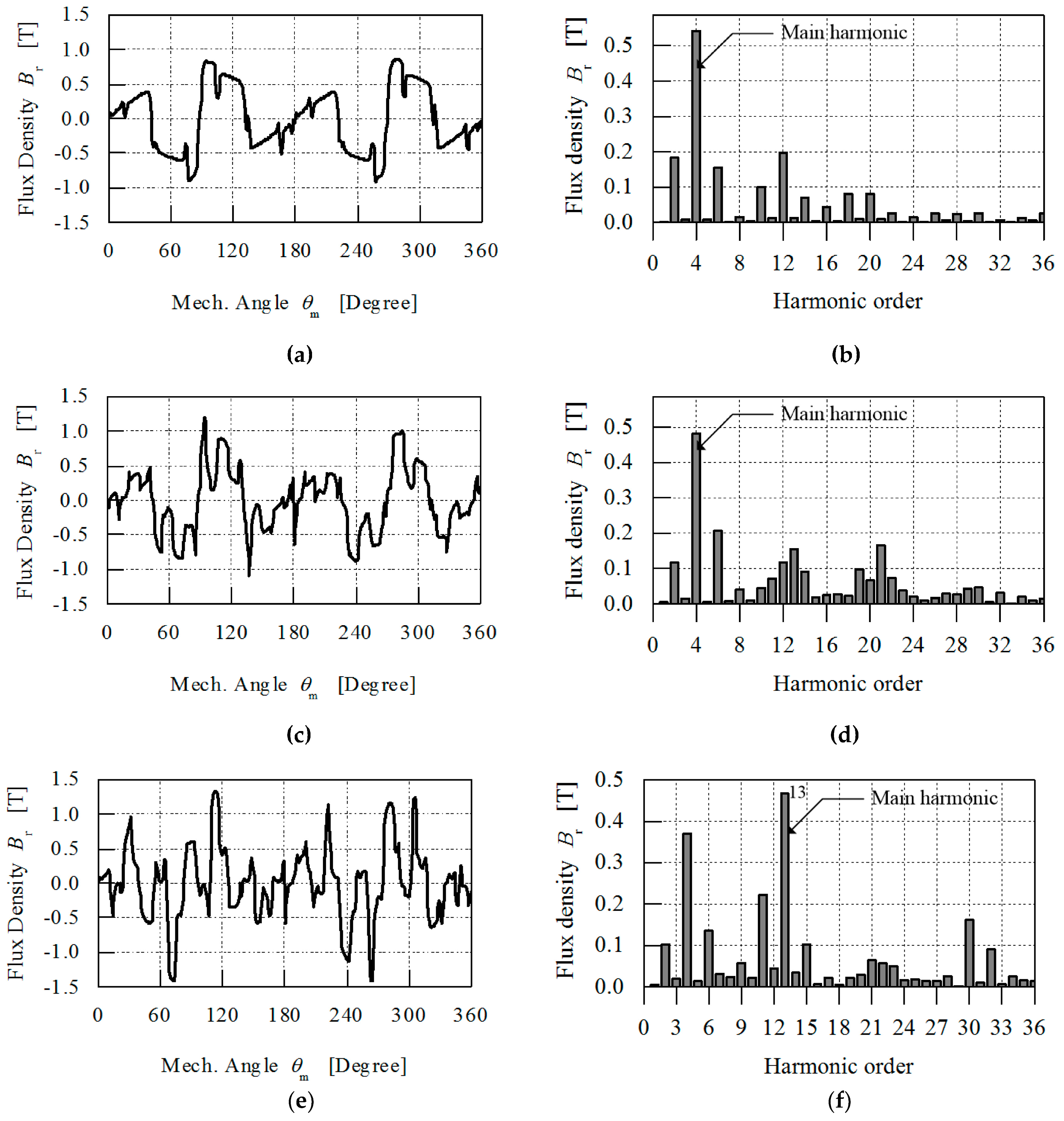
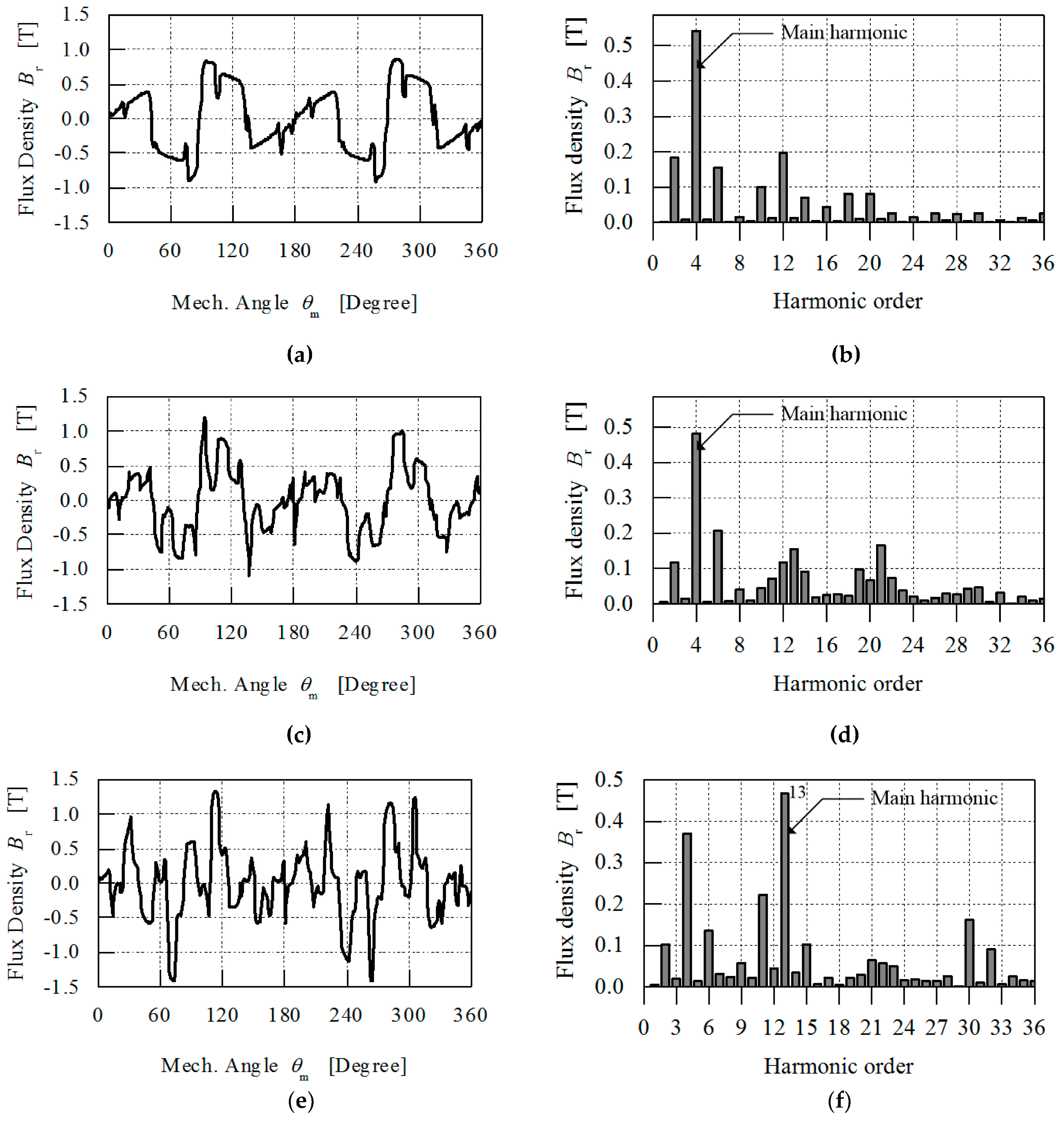
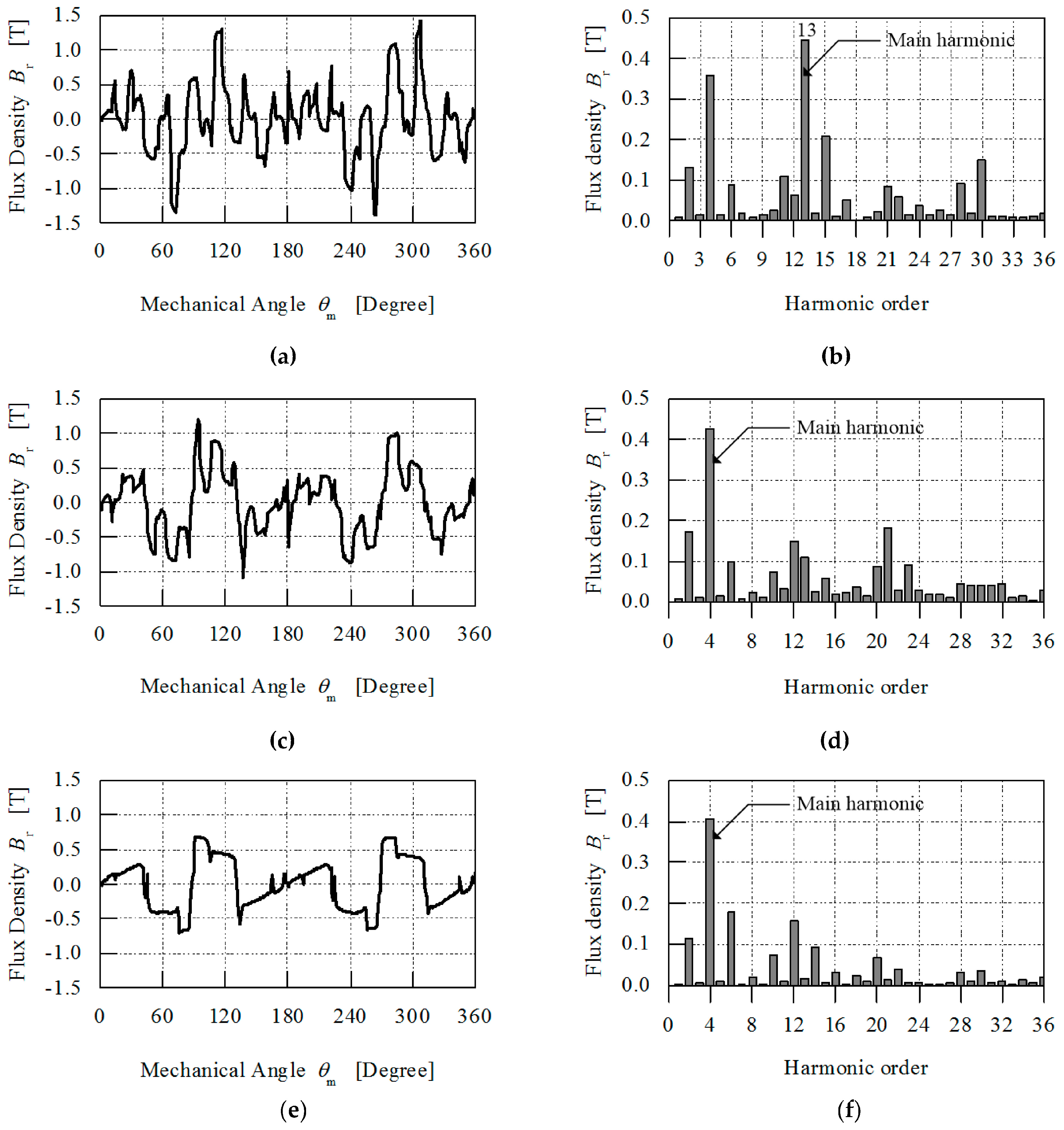
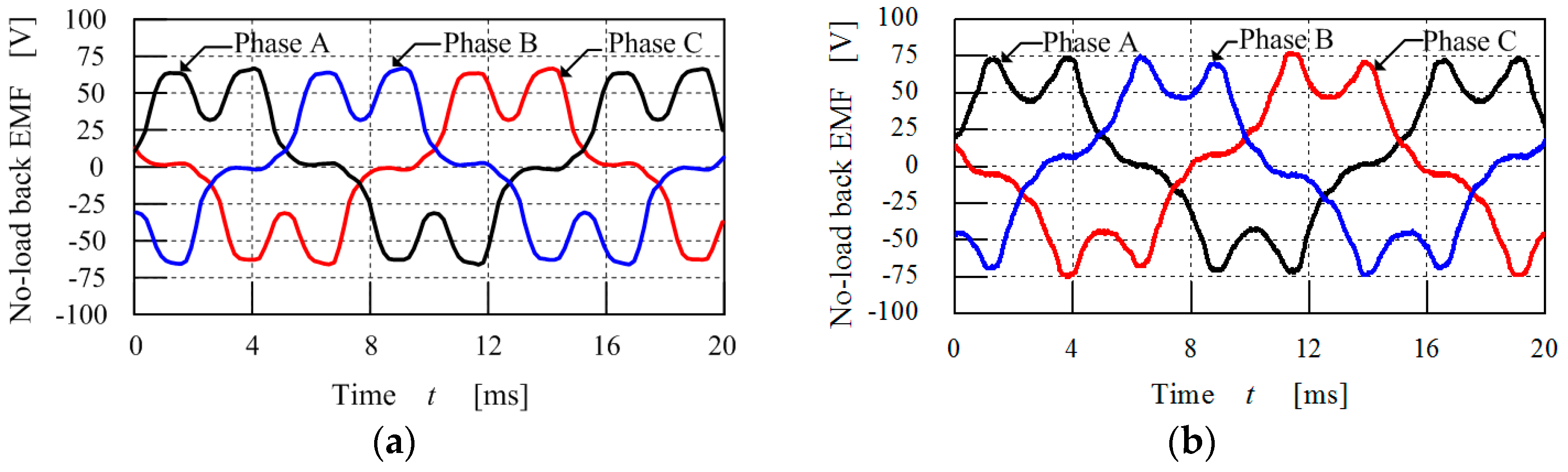
4.2. Flux Density Characteristics and Harmonic Analysis
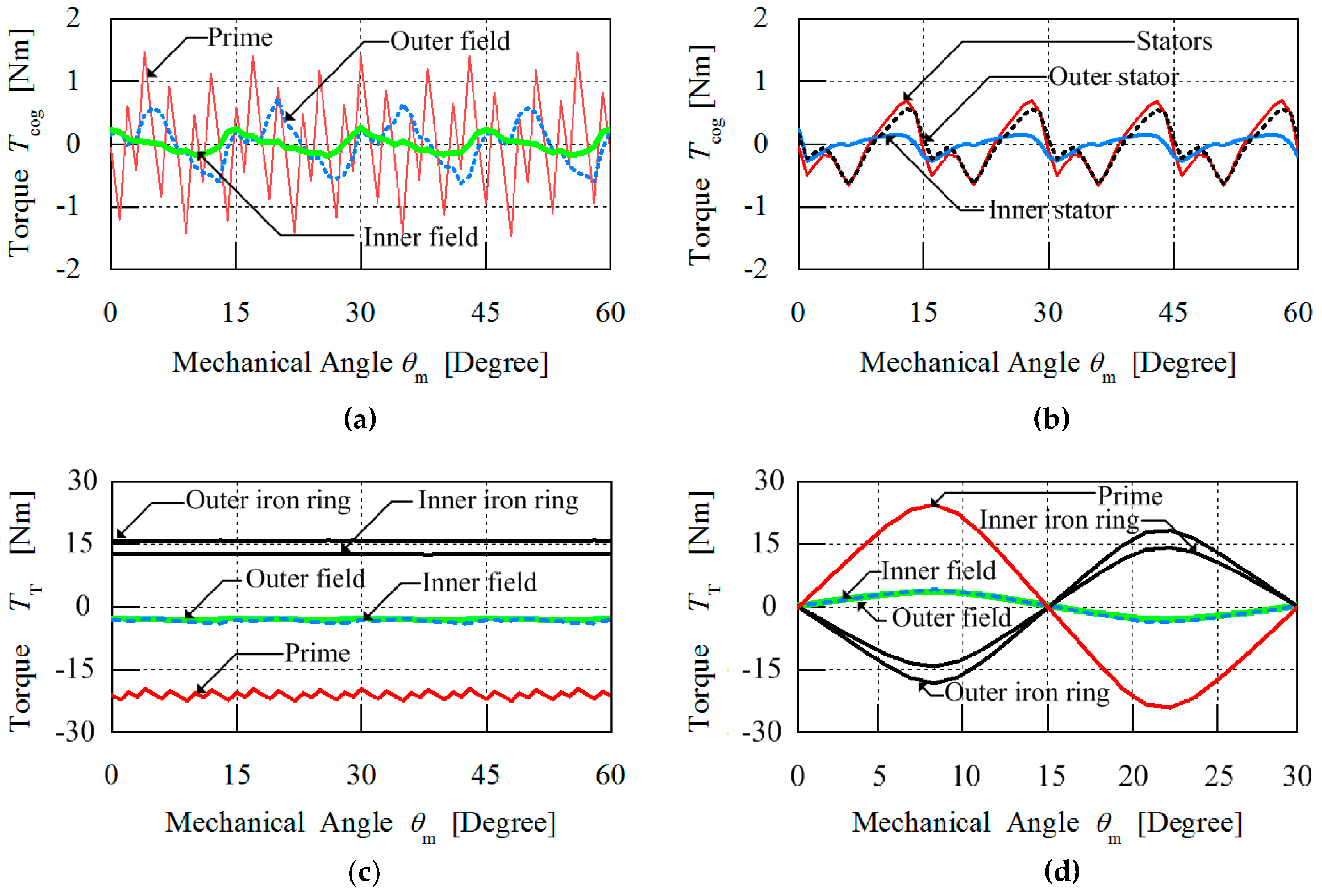
4.3. Cogging Torque and Transmission Torque Characteristics
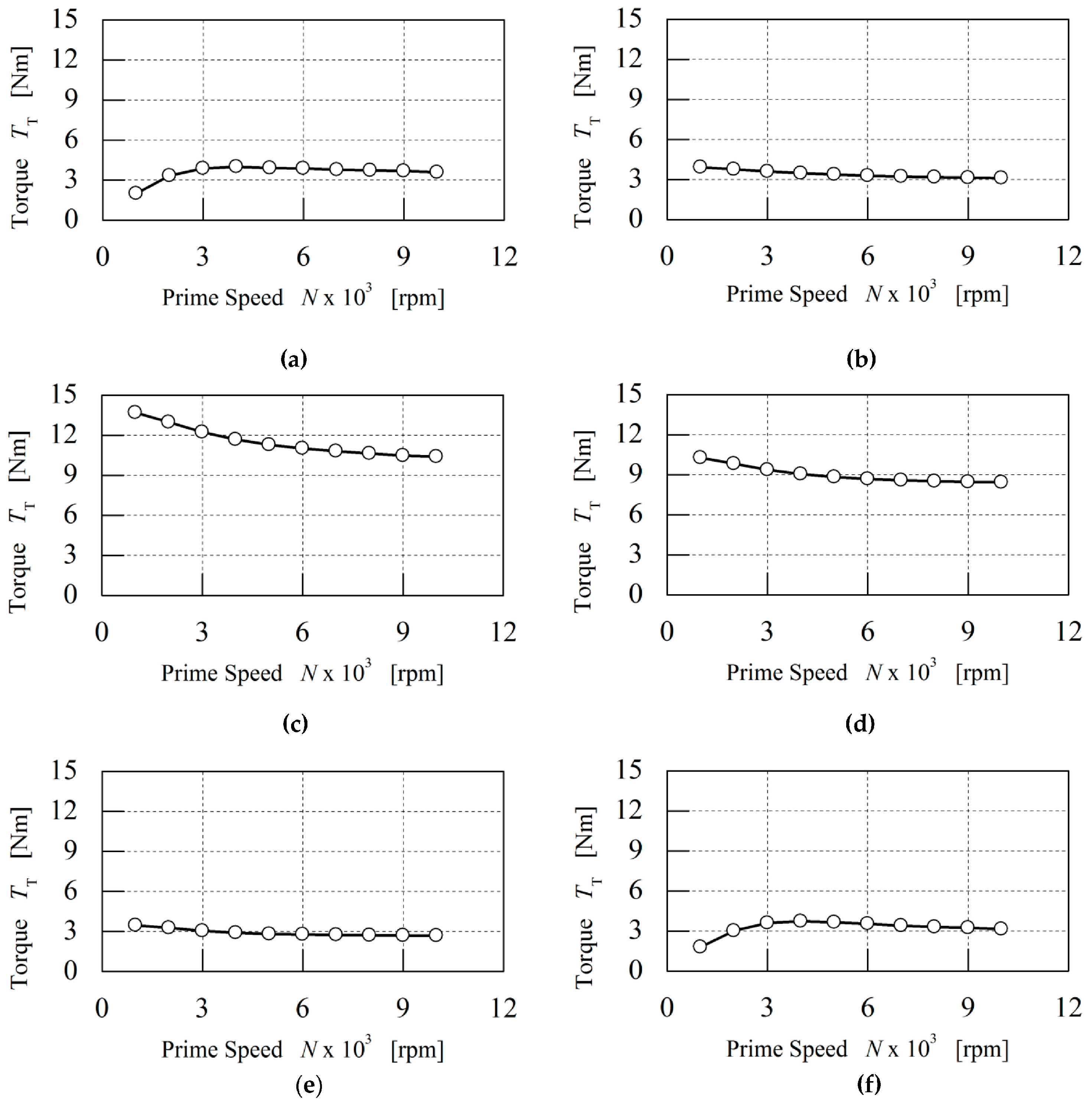
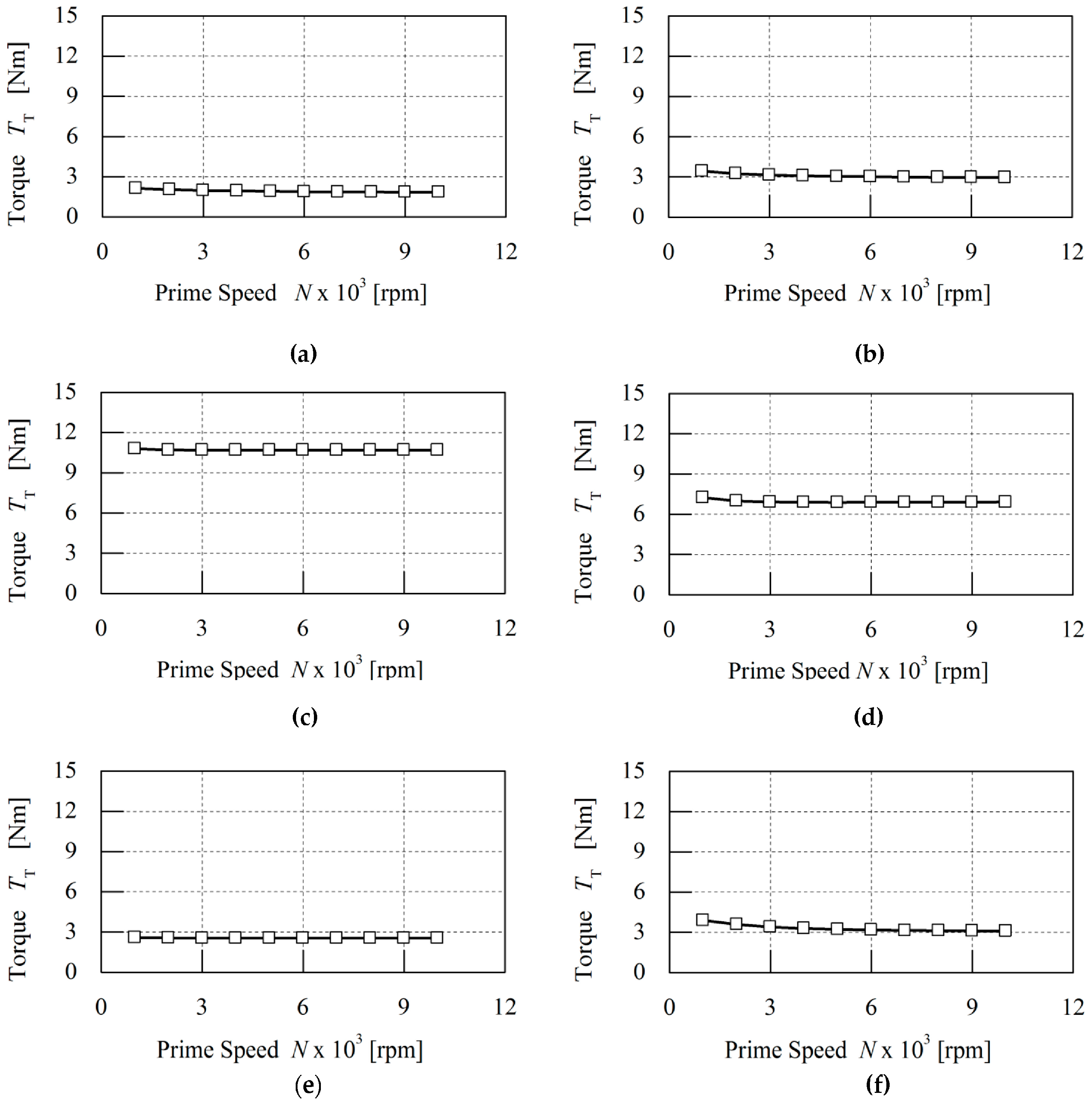
4.4. Torque Distribution Characteristics
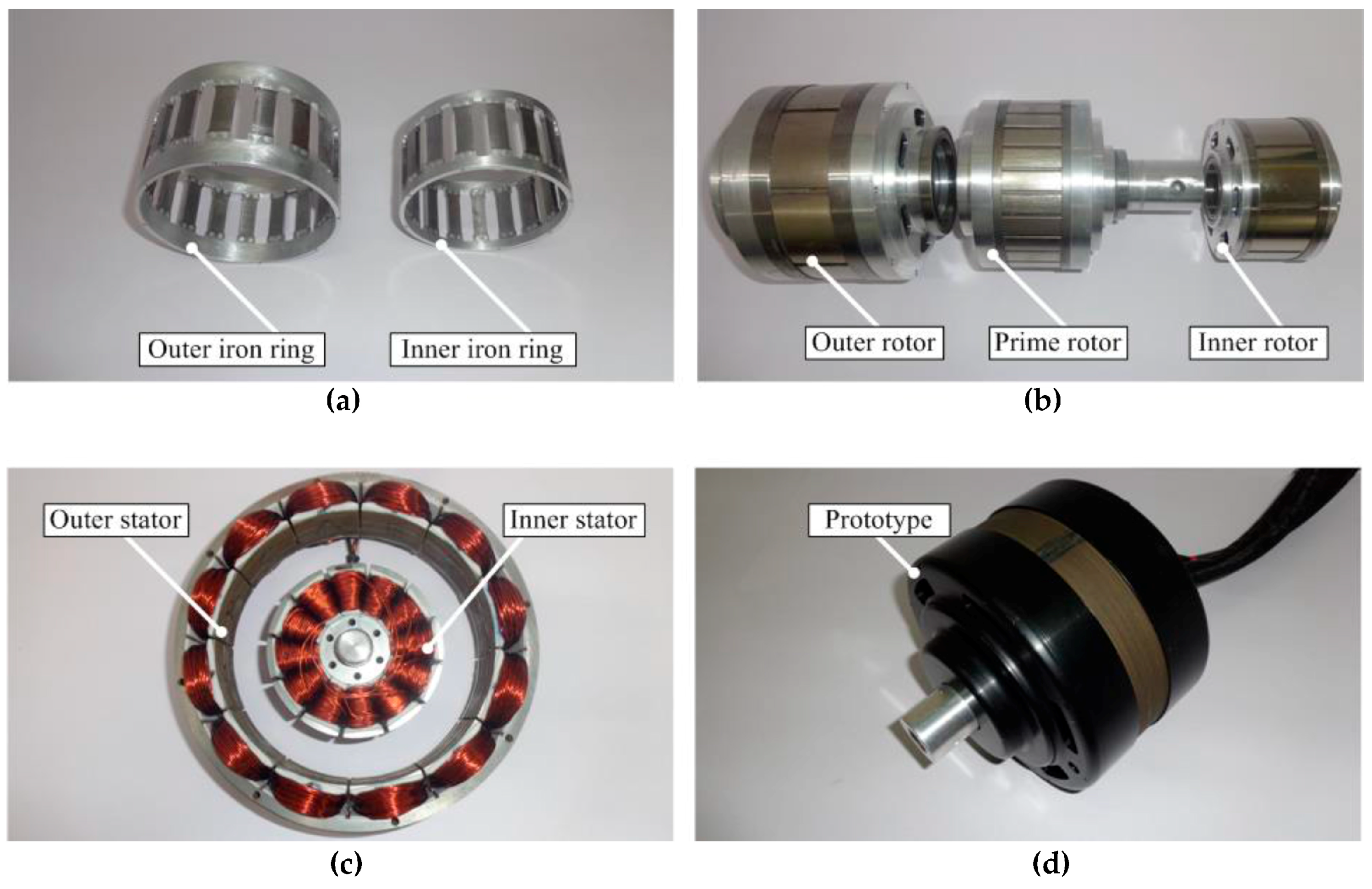
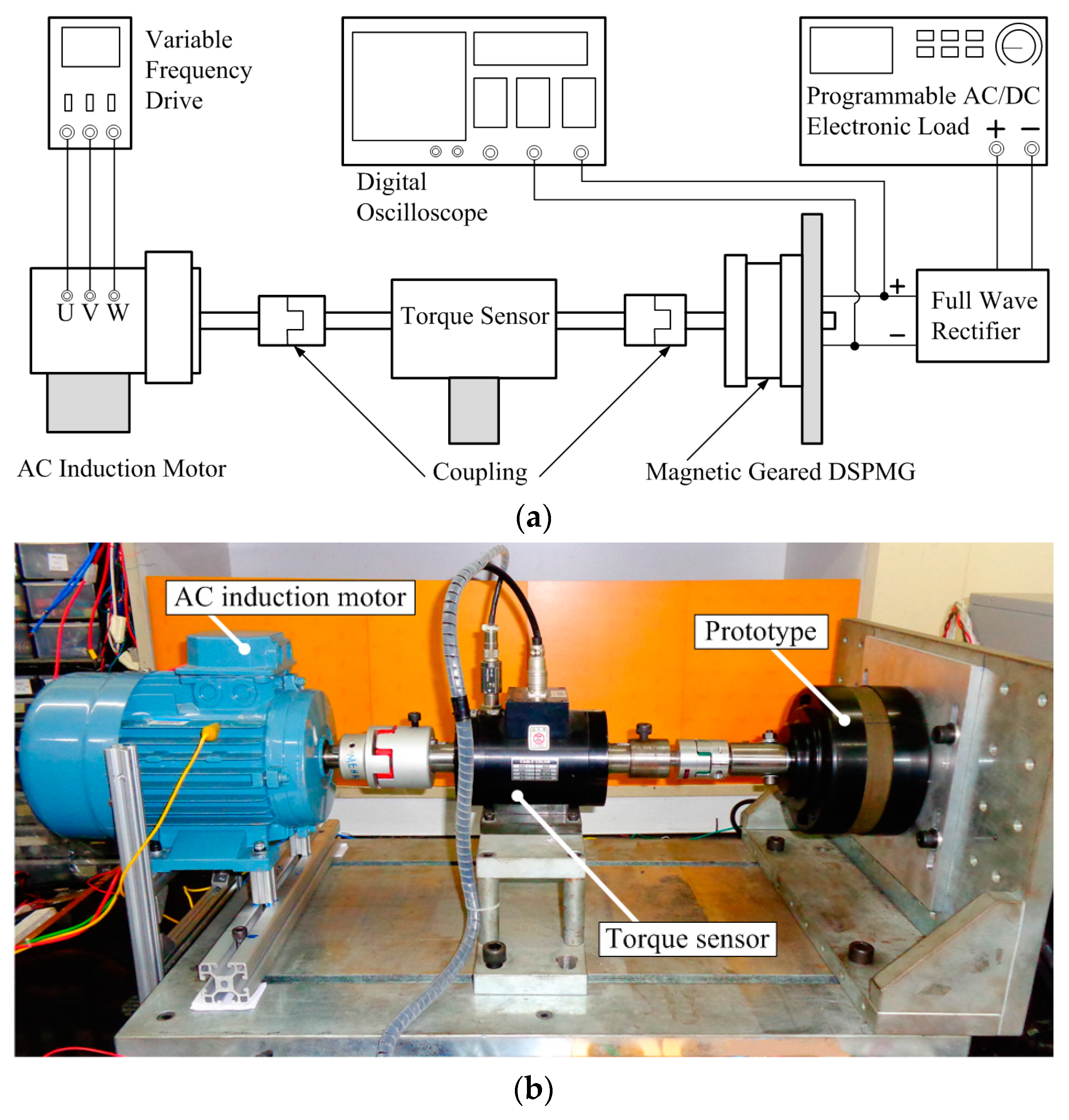
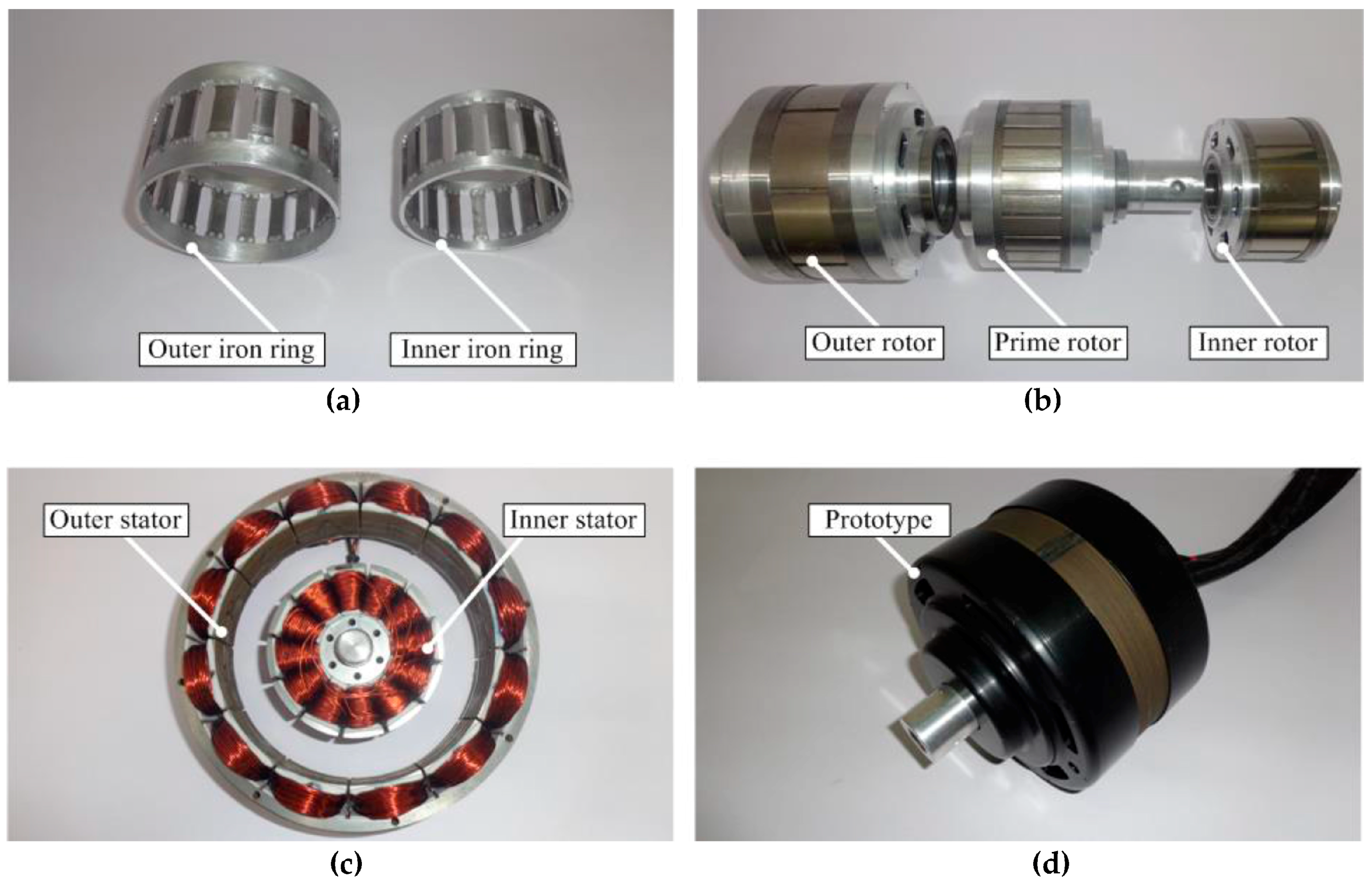
4.5. Prototype Machine
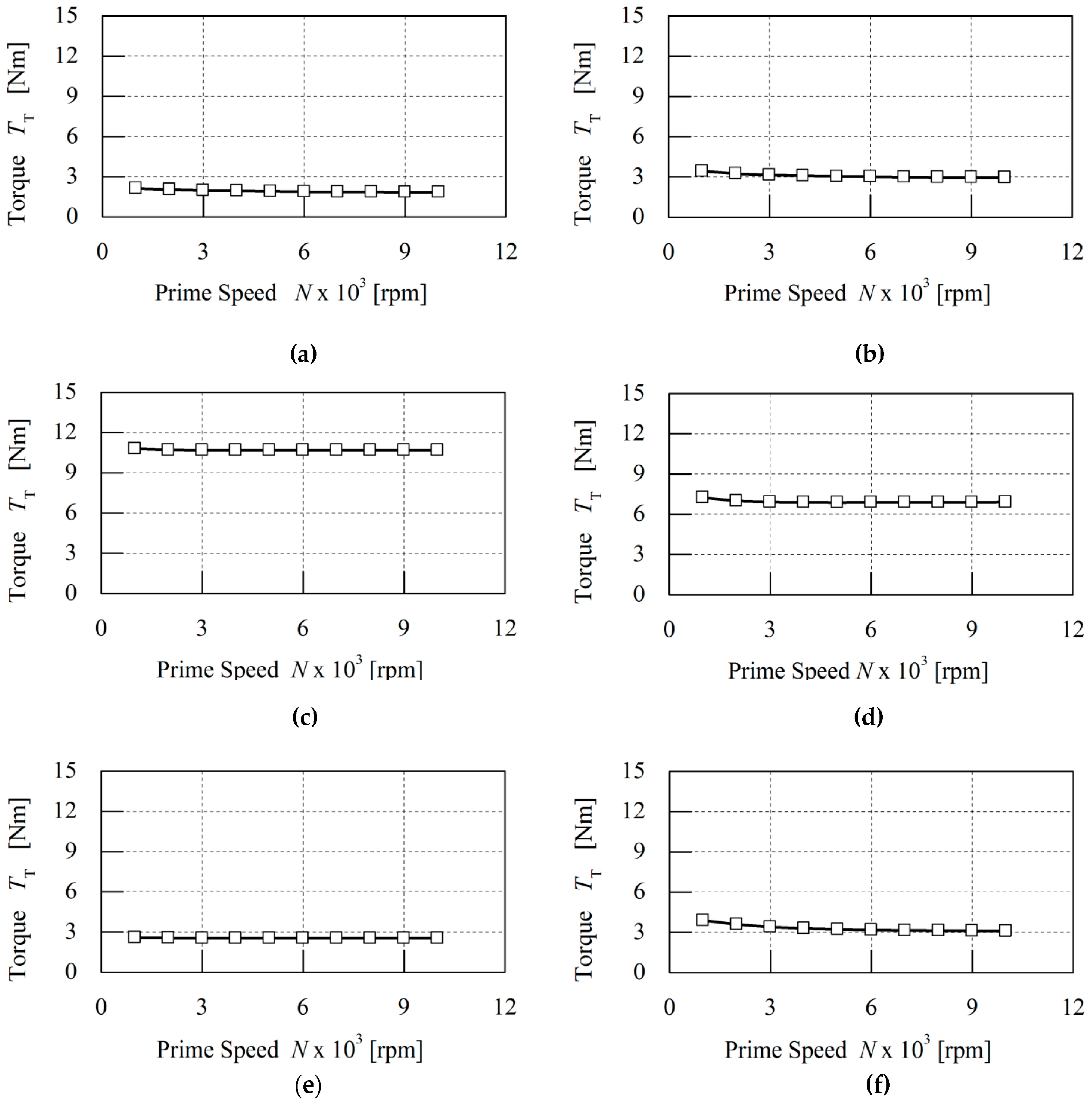
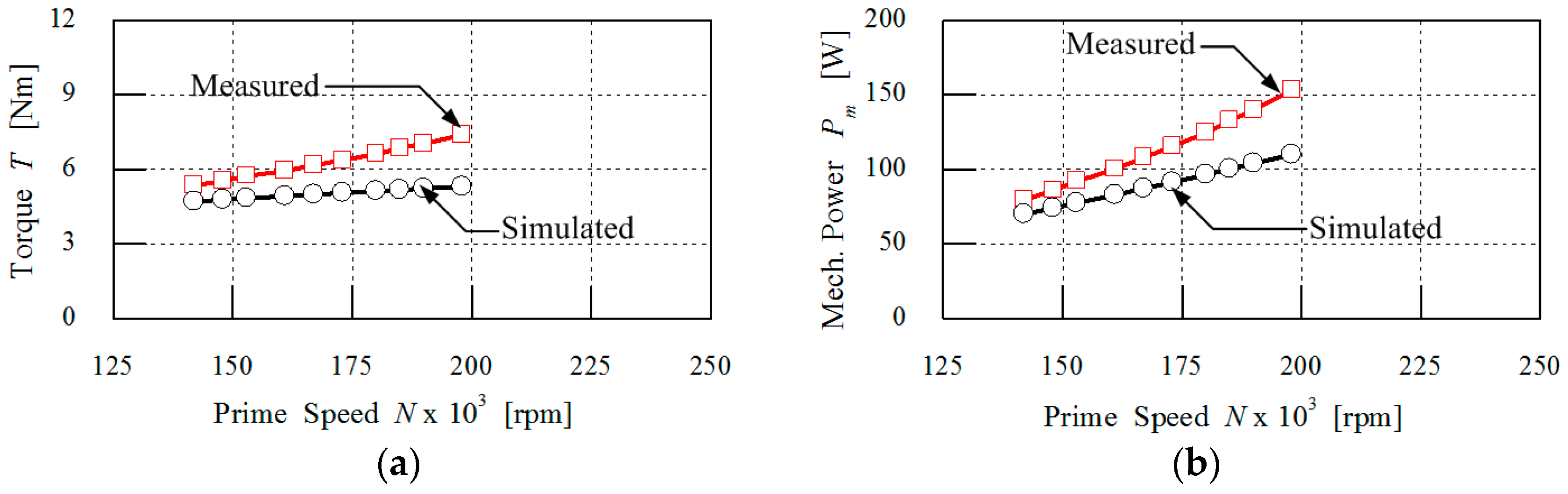
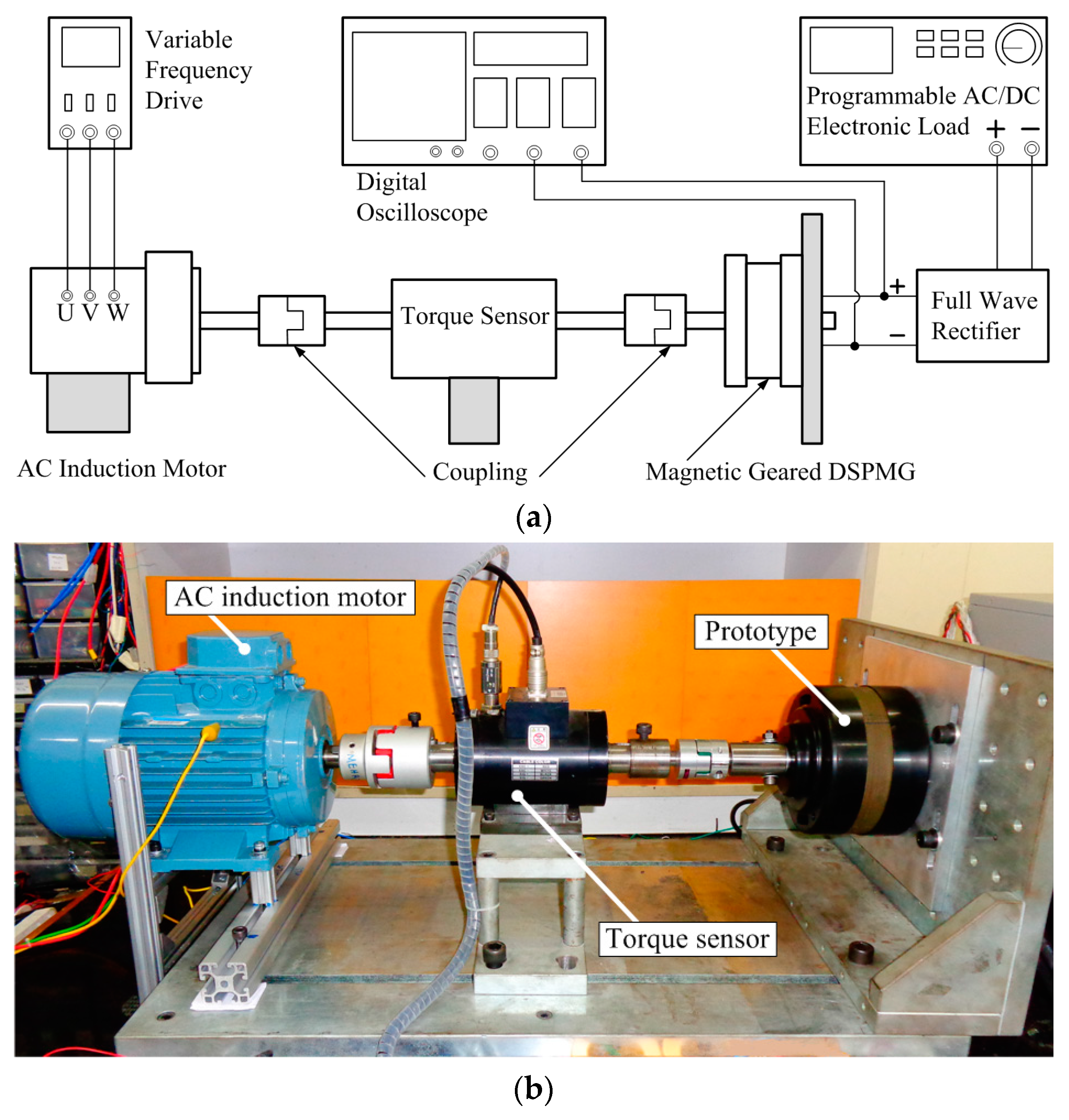
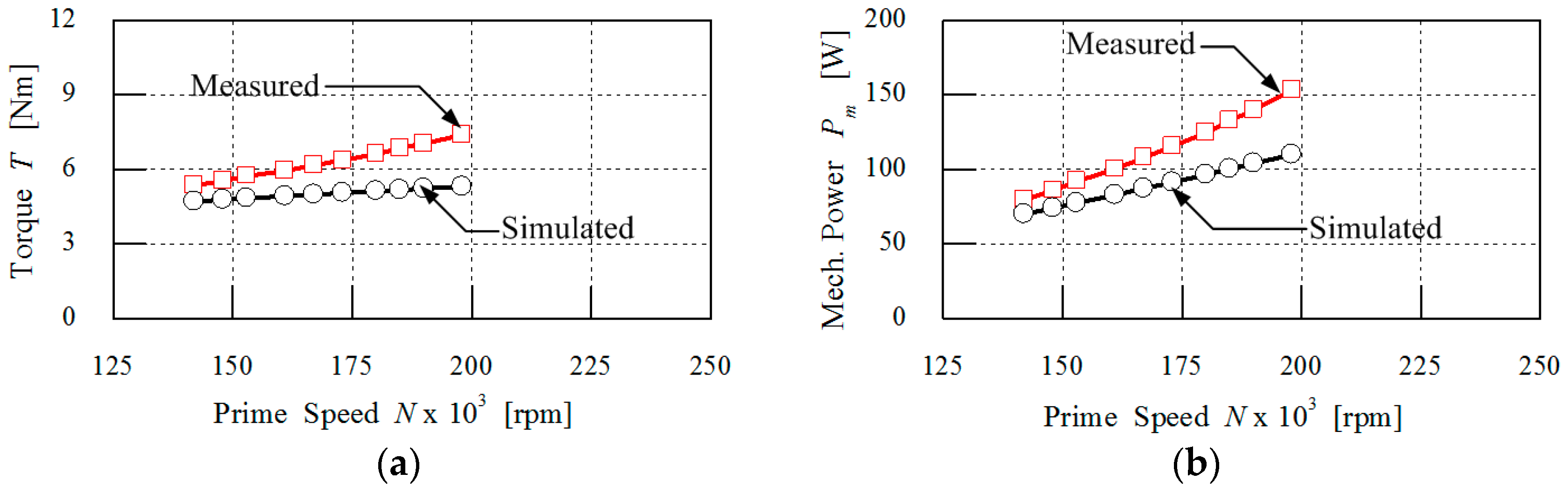
4.6. Mechanical Power–Speed Characteristics
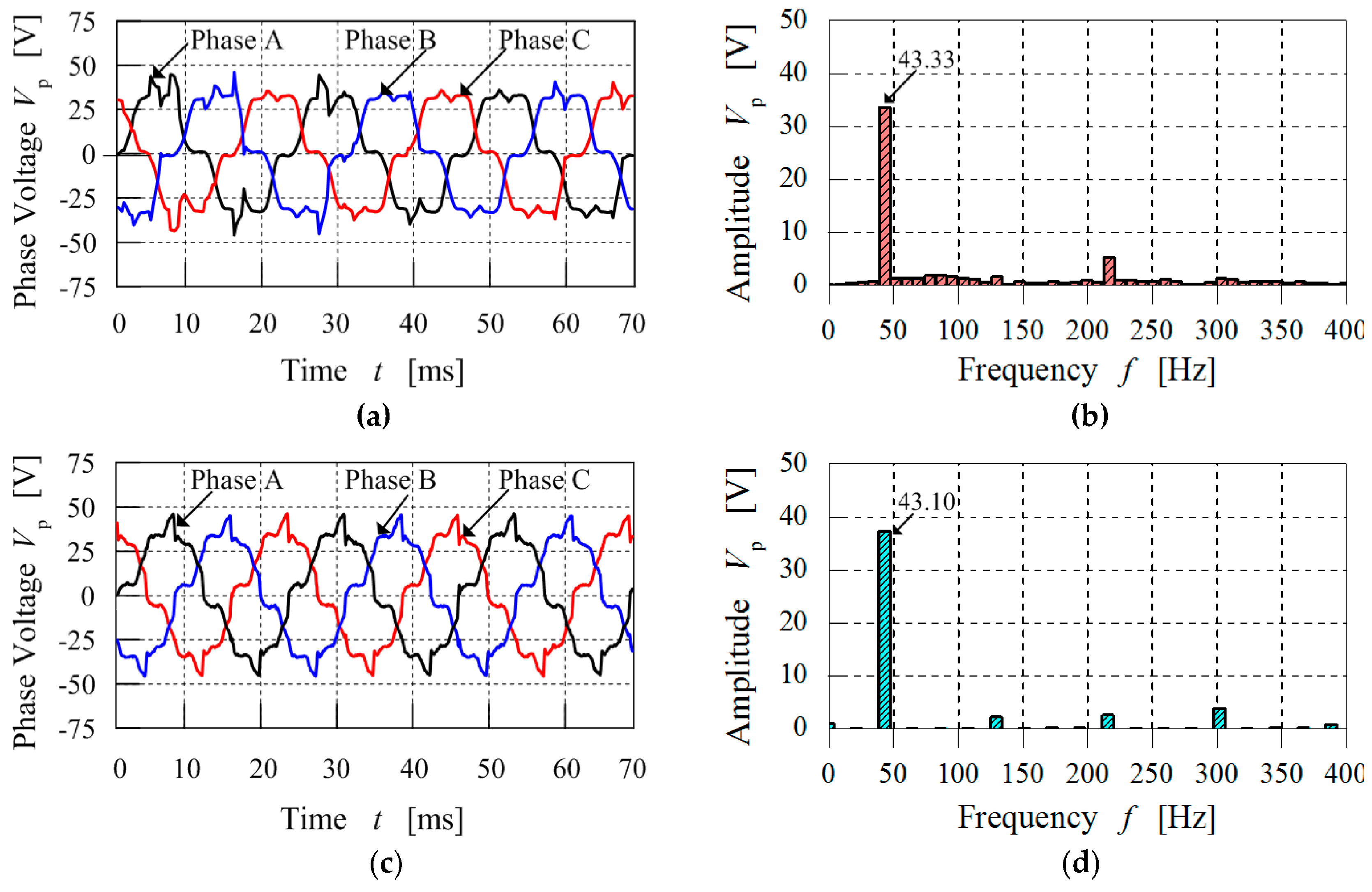
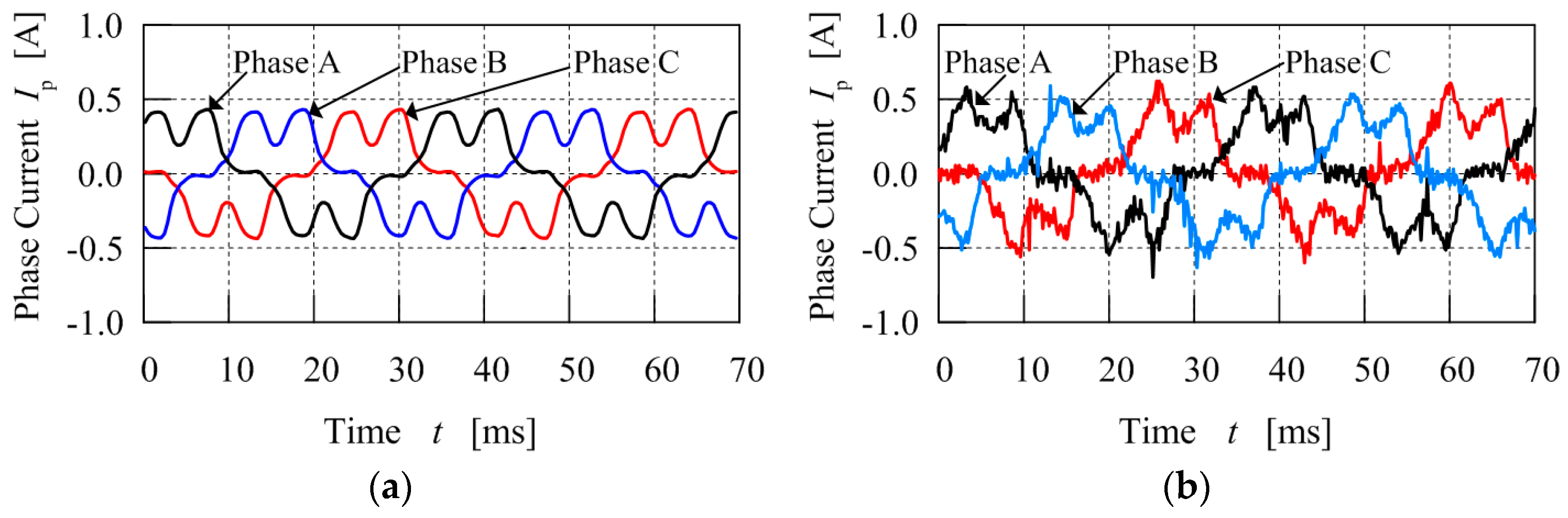
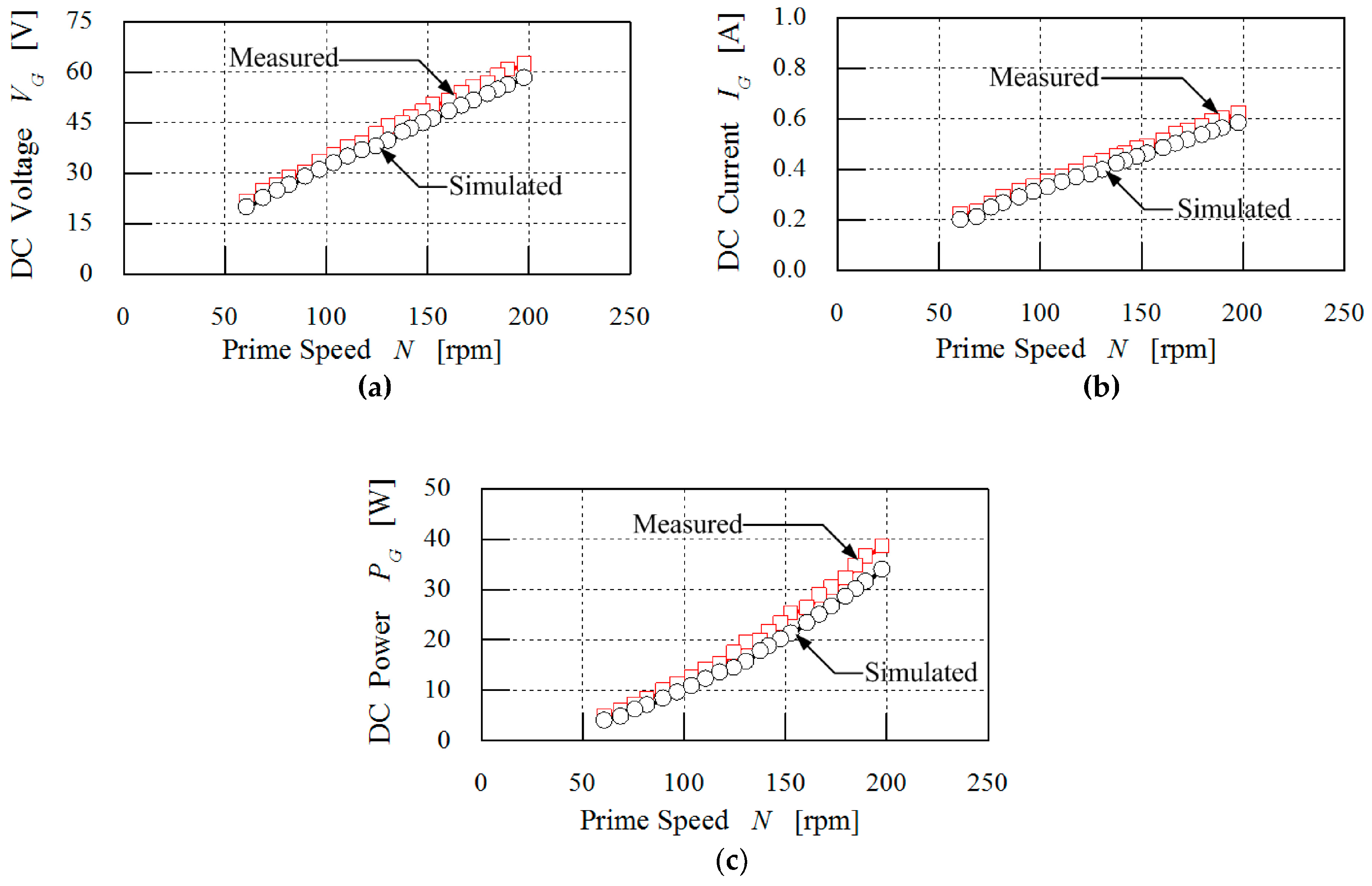
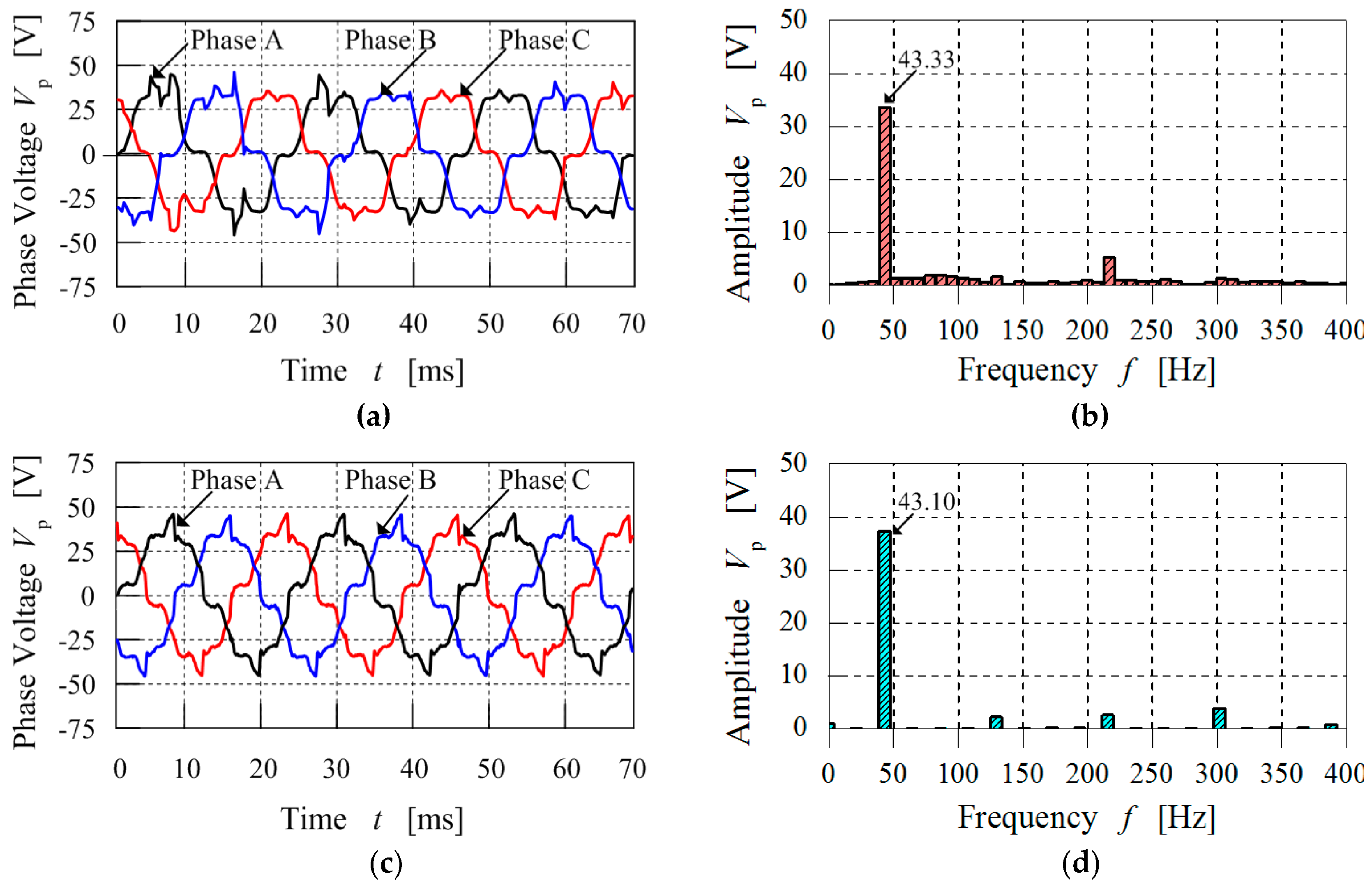
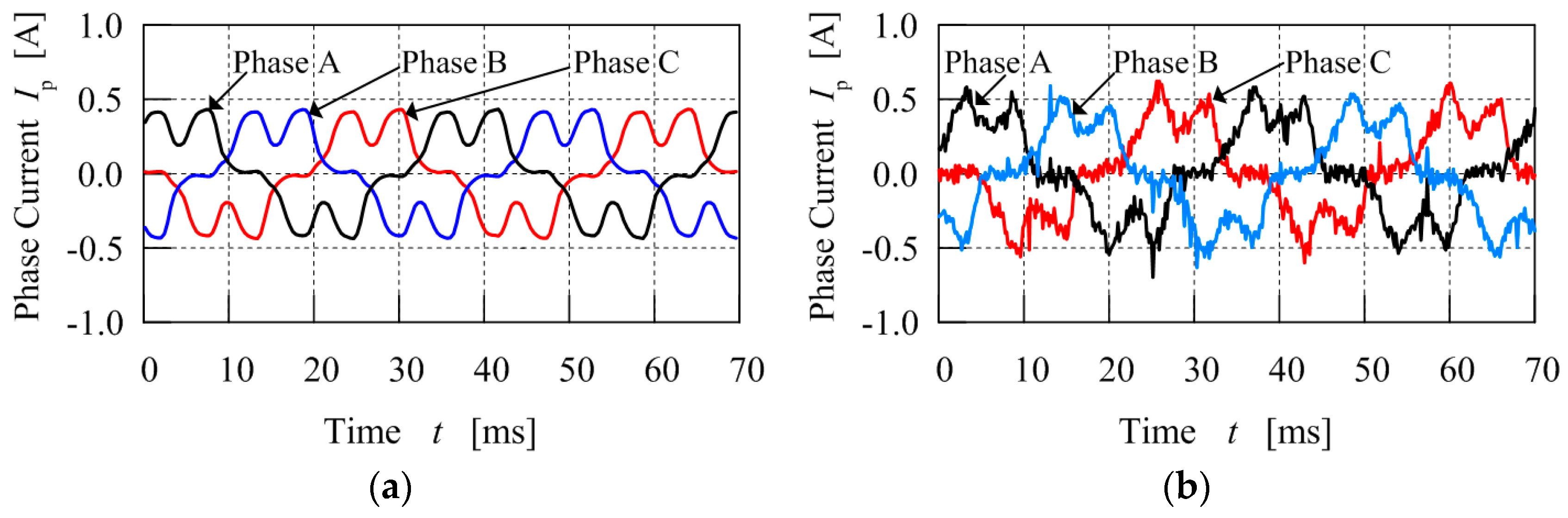
4.7. Electrical Power-Speed Characteristics
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Li, X.; Chau, K.T.; Cheng, M.; Hua, W. Comparison of magnetic-geared permanent magnet machines. Prog. Electromagn. Res. 2013, 133, 177–198. [Google Scholar] [CrossRef]
- Rens, J.; Atallah, K.; Calverley, S.D.; Howe, D. A novel magnetic harmonic gear. IEEE Trans. Ind. Appl. 2010, 46, 206–212. [Google Scholar] [CrossRef]
- Jian, L.N.; Chau, K.T. A coaxial magnetic gear with halbach permanent-magnet arrays. IEEE Trans. Energy Convers. 2010, 25, 319–328. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Liu, X.; Wang, C.; Chen, Z. Analysis and design optimization of a coaxial surface-mounted permanent-magnet magnetic gear. Energies 2014, 7, 8535–8553. [Google Scholar] [CrossRef]
- Atallah, K.; Wang, J.; Mezani, S.; Howe, D. A novel high-performance linear magnetic gear. IEEJ Trans. Ind. Appl. 2006, 126, 1352–1356. [Google Scholar] [CrossRef]
- Mezani, S.; Atallah, K.; Howe, D. A high-performance axial-field magnetic gear. J. Appl. Phys. 2006, 99, 08R303. [Google Scholar] [CrossRef]
- Acharya, V.M.; Bird, J.Z.; Calvin, M. Flux focusing axial magnetic gear. IEEE Trans. Magn. 2013, 49, 4092–4095. [Google Scholar] [CrossRef]
- Jorgensen, F.; Andersen, T.; Rasmussen, P. The cycloid permanent magnetic gear. Trans. Ind. Appl. 2008, 44, 1659–1665. [Google Scholar]
- Niguchi, N.; Hirata, K. Transmission torque analysis of a novel magnetic planetary gear employing 3-D FEM. IEEE Trans. Magn. 2012, 48, 1043–1046. [Google Scholar] [CrossRef]
- Niguchi, N.; Hirata, K. Cogging torque analysis of magnetic gear. IEEE Trans. Ind. Electron. 2012, 59, 2189–2197. [Google Scholar] [CrossRef]
- Tsai, M.C.; Ku, L.H. 3-D printing-based design of axial flux magnetic gear for high torque density. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Uppalapati, K.; Bomela, W.; Bird, J.Z.; Calvin, M.; Wright, J. Experimental evaluation of low-speed flux-focusing magnetic gearboxes. IEEE Trans. Ind. Appl. 2014, 50, 3637–3643. [Google Scholar] [CrossRef]
- Holm, R.K.; Berg, N.I.; Walkusch, M.; Rasmussen, P.O.; Hansen, R.H. Design of a magnetic lead screw for wave energy conversion. IEEE Trans. Ind. Appl. 2013, 49, 2699–2708. [Google Scholar] [CrossRef]
- Jing, L.; Liu, L.; Xiong, M.; Feng, D. Parameters analysis and optimization design for a concentric magnetic gear based on sinusoidal magnetizations. IEEE Trans. Appl. Supercond. 2014, 24, 1–5. [Google Scholar] [CrossRef]
- Huang, C.C.; Tsai, M.C.; Dorrell, D.G.; Lin, B.J. Development of a magnetic planetary gearbox. IEEE Trans. Magn. 2008, 44, 403–412. [Google Scholar] [CrossRef]
- Chen, Y.; Fu, W.N.; Ho, S.L.; Liu, H. A quantitative comparison analysis of radial-flux, transverse-flux, and axial-flux magnetic gears. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Frandsen, T.V.; Mathe, L.; Berg, N.I.; Holm, R.K.; Matzen, T.N.; Rasmussen, P.O.; Jensen, K.K. Motor integrated permanent magnet gear in a battery electrical vehicle. IEEE Trans. Ind. Appl. 2015, 51, 1516–1525. [Google Scholar] [CrossRef]
- Liu, C.T.; Chung, H.Y.; Hwang, C.C. Design assessments of a magnetic-geared double-rotor permanent magnet generator. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.T.; Zhang, Z. Novel design of double-stator single-rotor magnetic-geared machines. IEEE Trans. Magn. 2012, 48, 4180–4183. [Google Scholar] [CrossRef] [Green Version]
- Ohno, Y.; Niguchi, N.; Hirata, K.; Morimoto, E. Radial differential magnetic harmonic gear. JSAEM Appl. Electromagn. Mech. 2015, 23, 23–28. [Google Scholar] [CrossRef]
- Wang, Y.; Cheng, M.; Chen, M.; Du, Y.; Chau, K.T. Design of high-torque-density double-stator permanent magnet brushless motors. IET Electr. Power Appl. 2011, 5, 317–323. [Google Scholar] [CrossRef]
- Dosiek, L.; Pillay, P. Cogging torque reduction in permanent magnet machines. IEEE Trans. Ind. Appl. 2007, 43, 1565–1571. [Google Scholar] [CrossRef] [Green Version]
- Atallah, K.; Calverley, S.D.; Howe, D. Design, analysis and realization of a high performance magnetic gear. IEE Proc. Electr. Power Appl. 2004, 151, 135–143. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S. Design techniques for reducing the cogging torque in surface-mounted PM motors. IEEE Trans. Ind. Appl. 2002, 38, 1259–1265. [Google Scholar] [CrossRef]
- Zhu, Z.; Howe, D. Influence of design parameters on cogging torque in permanent magnet machines. IEEE Trans. Energy Convers. 2000, 15, 407–412. [Google Scholar] [CrossRef]
- Bianchi, N.; Dai, P.M. Use of the star of slots in designing fractional-slot single-layer synchronous motors. IEE Proc. Electr. Power Appl. 2006, 153, 459–466. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S.; Pre, M.D.; Grezzani, G. Design considerations for fractional-slot winding configurations of synchronous machines. IEEE Trans. Ind. Appl. 2006, 42, 997–1006. [Google Scholar] [CrossRef]
- El-Refaie, A.M. Fractional-slot concentrated-windings synchronous permanent magnet machines: Opportunities and challenges. IEEE Trans. Ind. Electron. 2010, 57, 107–121. [Google Scholar] [CrossRef]
- Jian, L.; Chau, K.T.; Jiang, J. A magnetic-geared outer-rotor permanent-magnet brushless machine for wind power generation. IEEE Trans. Ind. Appl. 2009, 45, 954–962. [Google Scholar] [CrossRef]
- Norhisam, M.; Ridzuan, S.; Firdaus, R.; Aravind, C.; Wakiwaka, H.; Nirei, M. Comparative evaluation on power-speed density of portable permanent magnet generators for agricultural application. Prog. Electromagn. Res. 2012, 129, 345–363. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Pole-pair number outer and inner field PMs | 4 |
| Pole-pair number prime PMs | 13 |
| Pole number outer and inner iron ring pieces | 17 |
| Number of outer stator slots | 12 |
| Number of inner stator slots | 12 |
| Outer and inner airgap | 1 mm |
| Thickness of PMs | 3 mm |
| Thickness of iron ring pieces | 3 mm |
| Axial length | 30 mm |
| Outer diameter | 151 mm |
| Component | Material |
|---|---|
| Magnets | Nd-Fe-B-38H |
| Iron rings | SS400 |
| Rotors | SS400 |
| Stators | 50H800 Laminated steel sheet |
| Iron ring end rings | Aluminium |
| Shaft | Aluminium |
| Parameter | Value |
|---|---|
| Diameter of coil wire | 0.80 mm |
| Outer coil number of turns | 75 |
| Inner coil number of turns | 31 |
| Outer coil resistance per phase | 1.20 Ω |
| Inner coil resistance per phase | 0.40 Ω |
| Quantity | Outer Field | Inner Field | Prime | Outer Stator | Inner Stator | Stators |
|---|---|---|---|---|---|---|
| Peak-to-Peak | 1.35 Nm | 0.46 Nm | 3.00 Nm | 1.21 Nm | 0.43 Nm | 1.35 Nm |
| Cogging torque | 0.67 Nm | 0.23 Nm | 1.50 Nm | 0.60 Nm | 0.21 Nm | 0.67 Nm |
| Quantity | Outer Field | Inner Field | Prime | Inner Ring | Outer Ring |
|---|---|---|---|---|---|
| Average torque | 3.43 Nm | 3.05 Nm | 21.08 Nm | 12.55 Nm | 15.76 Nm |
| Pull-out torque | 4.05 Nm | 3.65 Nm | 24.37 Nm | 14.14 Nm | 18.21 Nm |
| Torque ripple | 39.27% | 15.09% | 14.25% | 1.70% | 1.66% |
| Parameter | Tavg 1 | Tavg 2 | Tavg 3 | Tavg 4 | Tavg 5 | Tavg 6 |
|---|---|---|---|---|---|---|
| Kslope | 0.00300 | 0.00040 | 0.00007 | 0.00020 | 0.00020 | 0.00070 |
| Parameter | Tavg 1 | Tavg 2 | Tavg 3 | Tavg 4 | Tavg 5 | Tavg 6 |
|---|---|---|---|---|---|---|
| Kslope | 0.00090 | 0.00090 | 0.00350 | 0.00190 | 0.00080 | 0.00070 |
| Parameter | Calculated | Measured |
|---|---|---|
| Resistive load | 100 Ω | 100 Ω |
| Speed of prime rotor | 200 rpm | 200 rpm |
| Speed of field rotor | −650 rpm | −646 rpm |
| DC Voltage | 62.55 V | 63.25 V |
| DC Current | 0.63 A | 0.63 A |
| DC Power | 39.41 W | 39.85 W |
| Gear ratio | 3.25 | 3.23 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salihu Mustafa, S.; Misron, N.; Mariun, N.; Othman, M.L.; Hanamoto, T. Torque Distribution Characteristics of a Novel Double-Stator Permanent Magnet Generator Integrated with a Magnetic Gear. Energies 2017, 10, 2. https://doi.org/10.3390/en10010002
Salihu Mustafa S, Misron N, Mariun N, Othman ML, Hanamoto T. Torque Distribution Characteristics of a Novel Double-Stator Permanent Magnet Generator Integrated with a Magnetic Gear. Energies. 2017; 10(1):2. https://doi.org/10.3390/en10010002
Chicago/Turabian StyleSalihu Mustafa, Shehu, Norhisam Misron, Norman Mariun, Mohammad Lutfi Othman, and Tsuyoshi Hanamoto. 2017. "Torque Distribution Characteristics of a Novel Double-Stator Permanent Magnet Generator Integrated with a Magnetic Gear" Energies 10, no. 1: 2. https://doi.org/10.3390/en10010002