
Multi-Agent System Fault Protection with Topology Identification in Microgrids

 ,
,
Abstract
:1. Introduction
2. Topology Identification Matrix Method
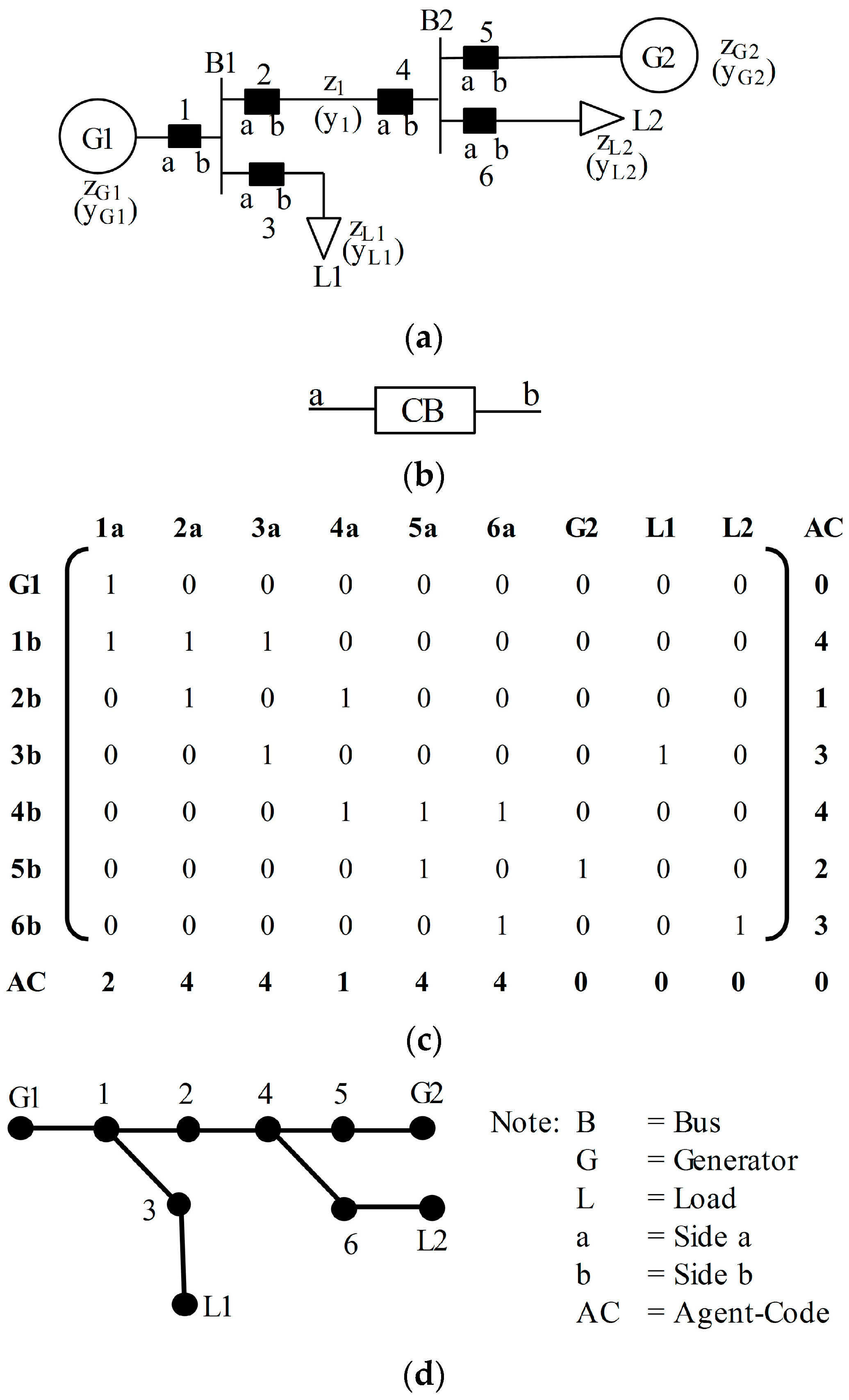
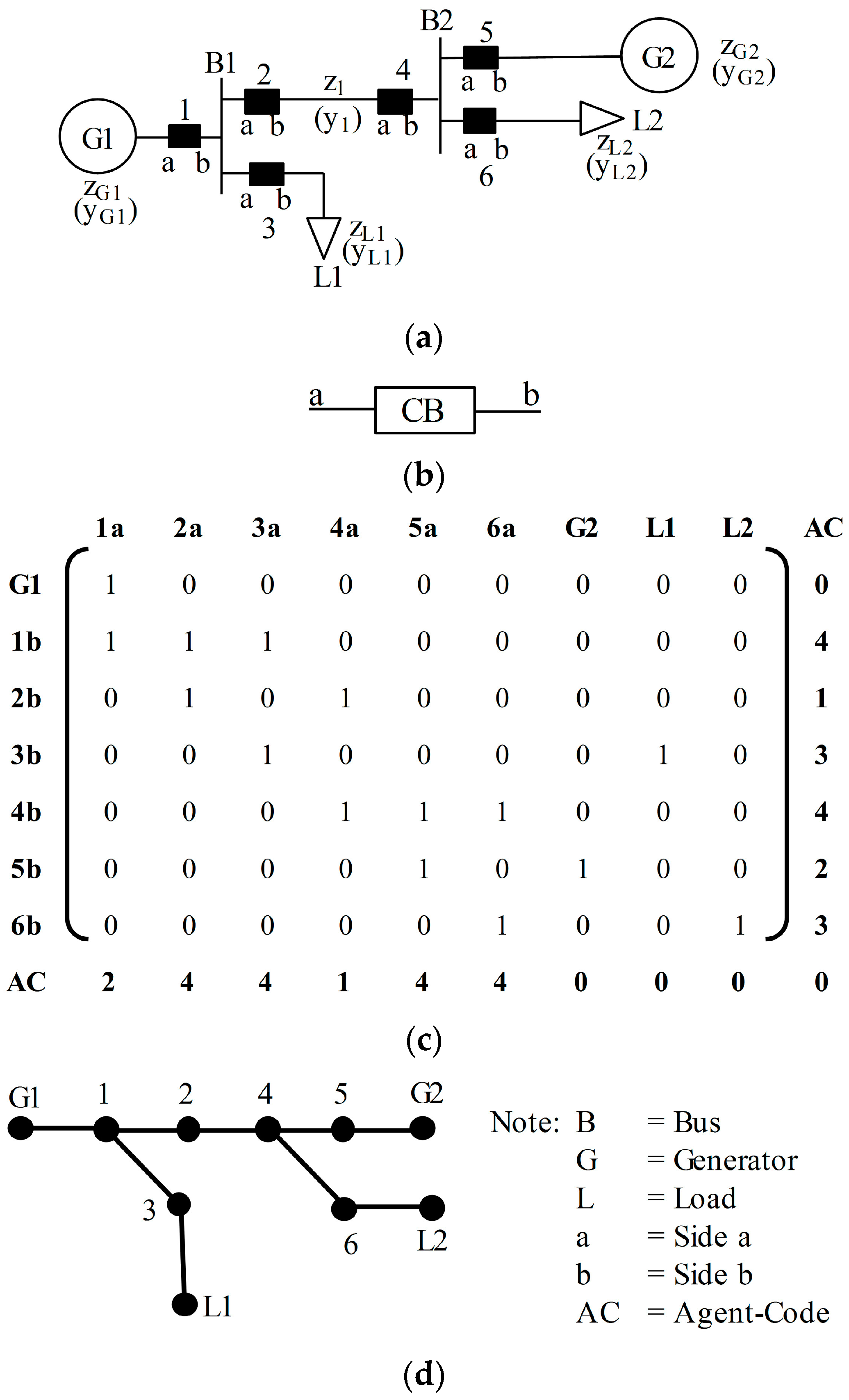
2.1. Topology Matrix Model
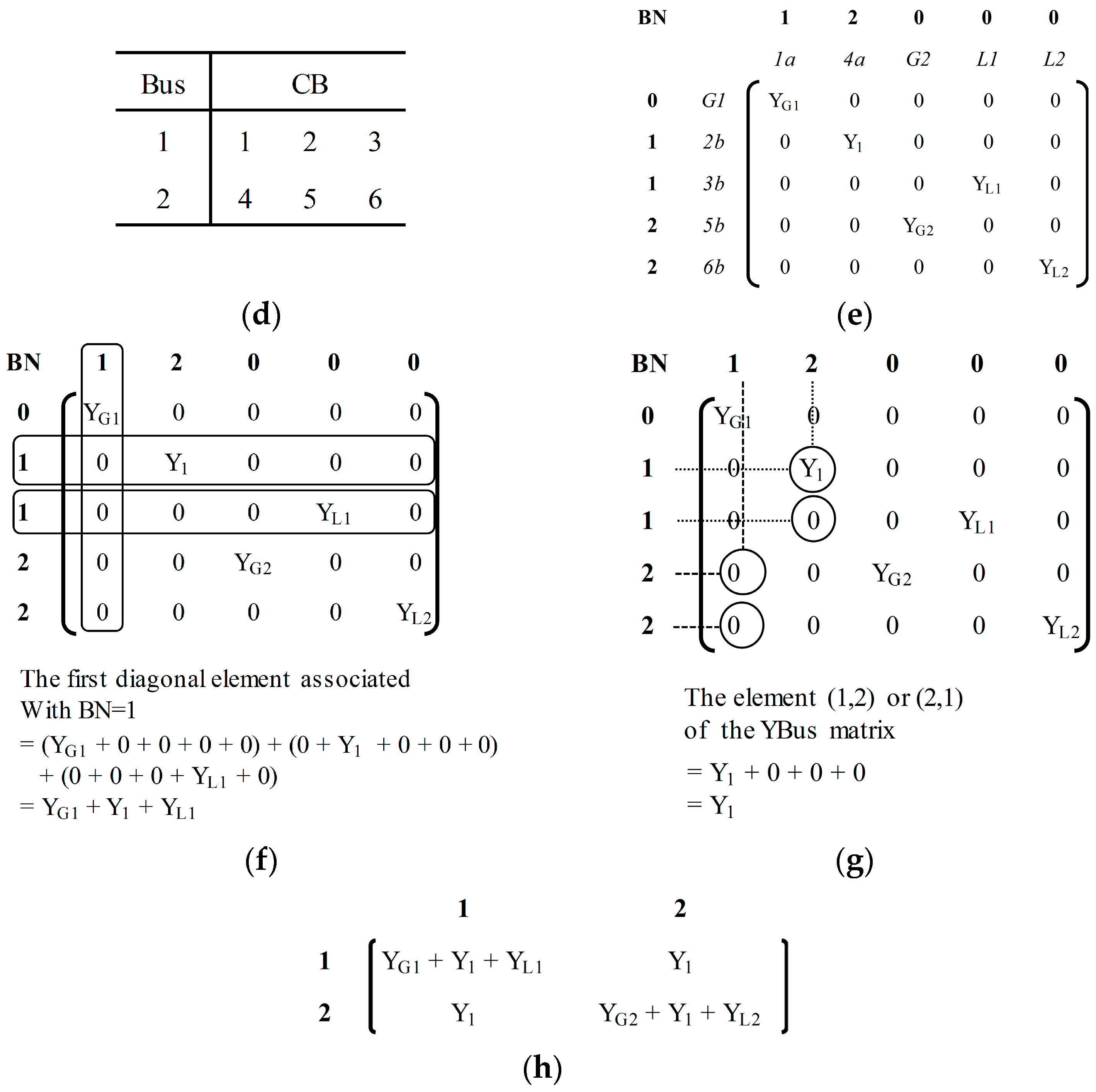
2.2. YBus Matrix Algorithm
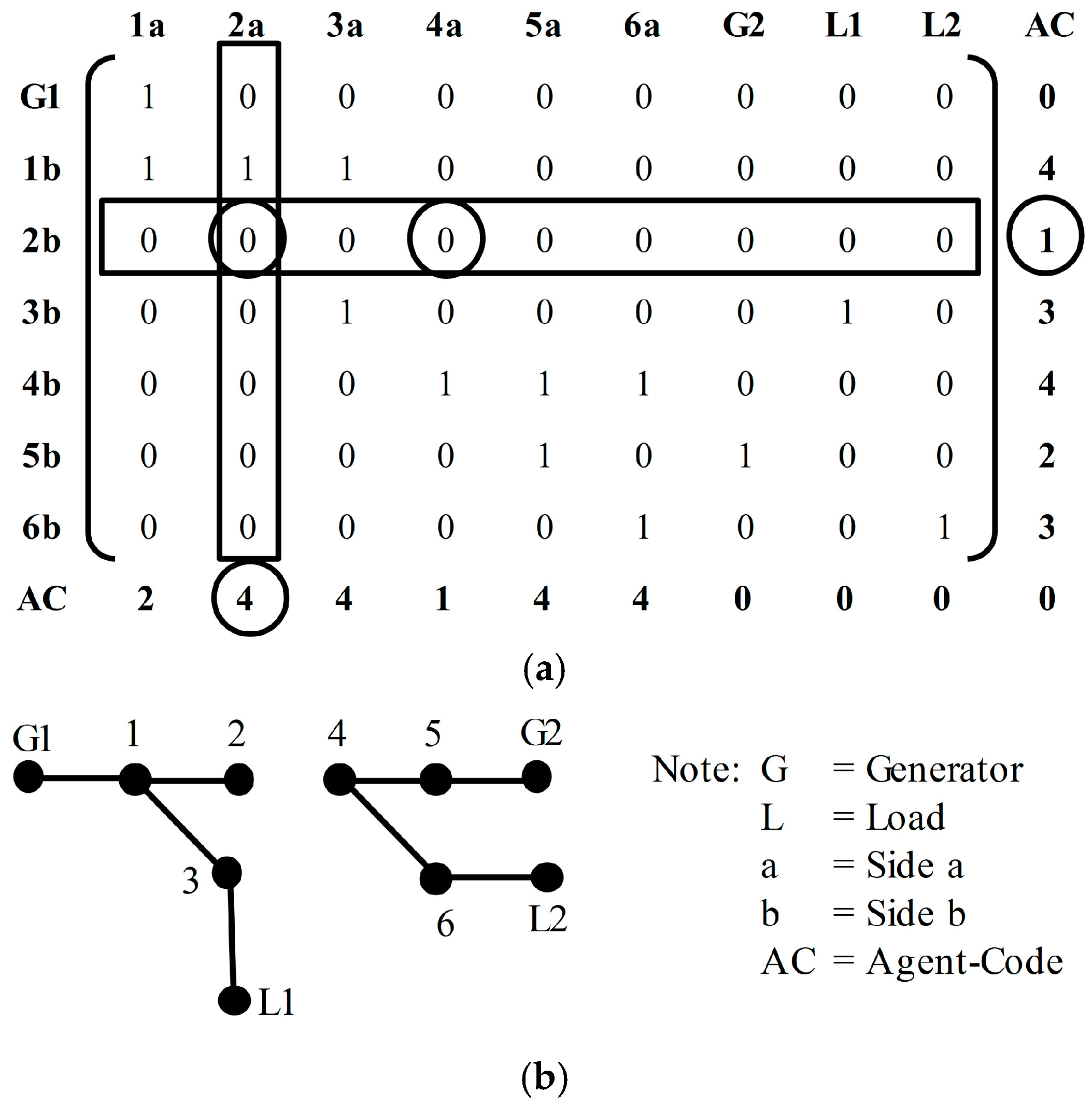
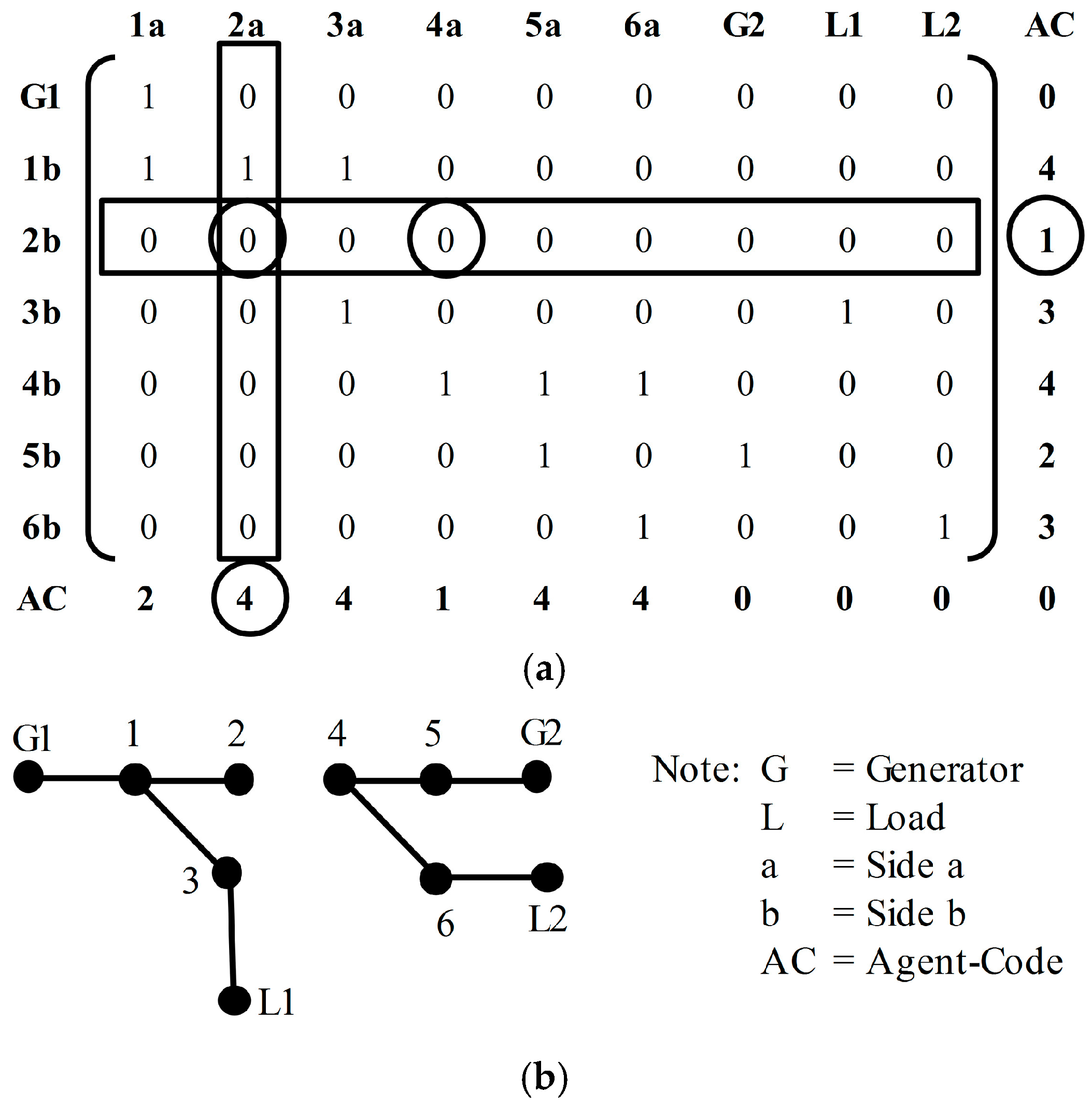
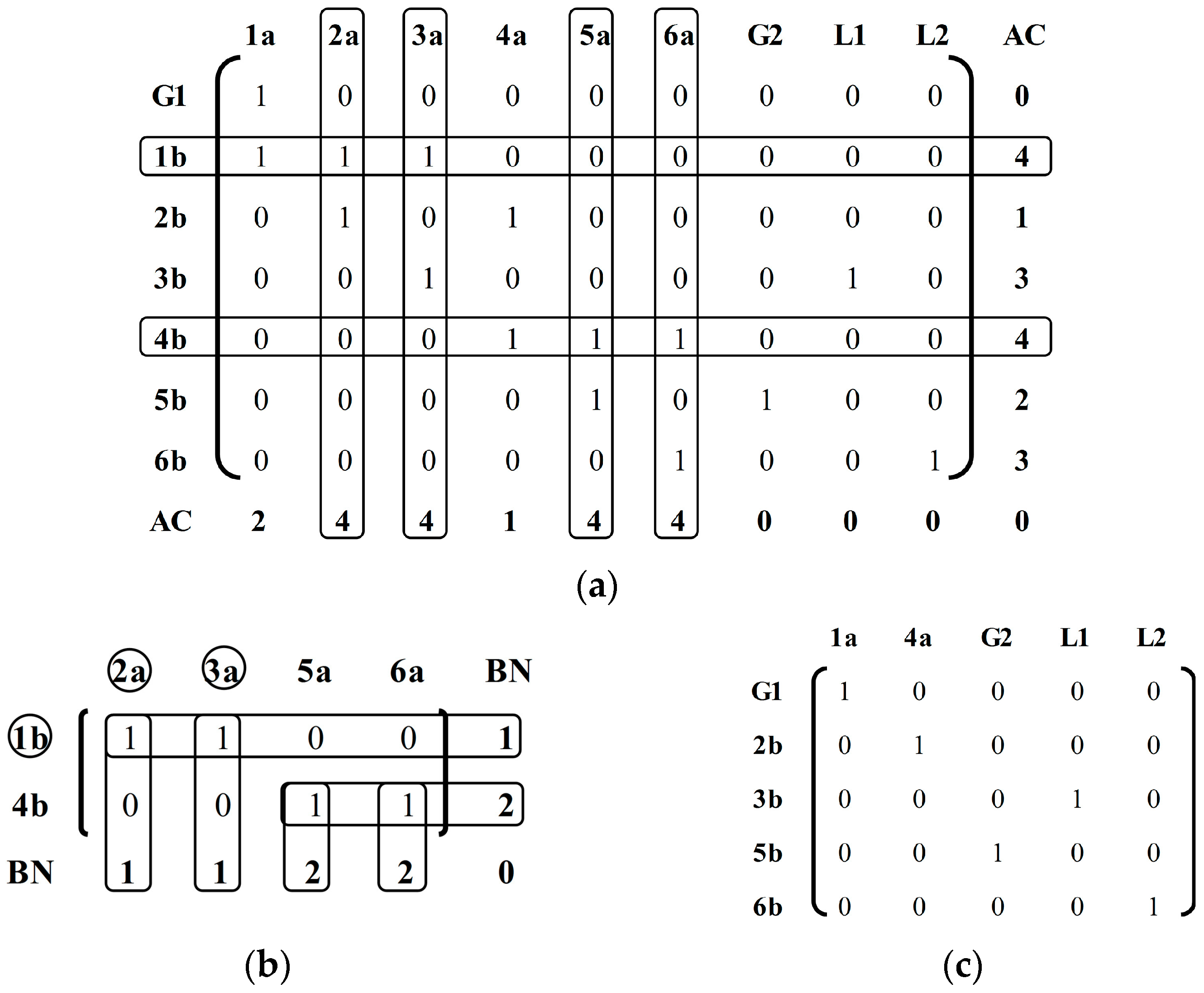
2.2.1. Step 1: Extract the Conversion Matrix (CM) and Base Matrix (BM) from the Topology Matrix (TM)
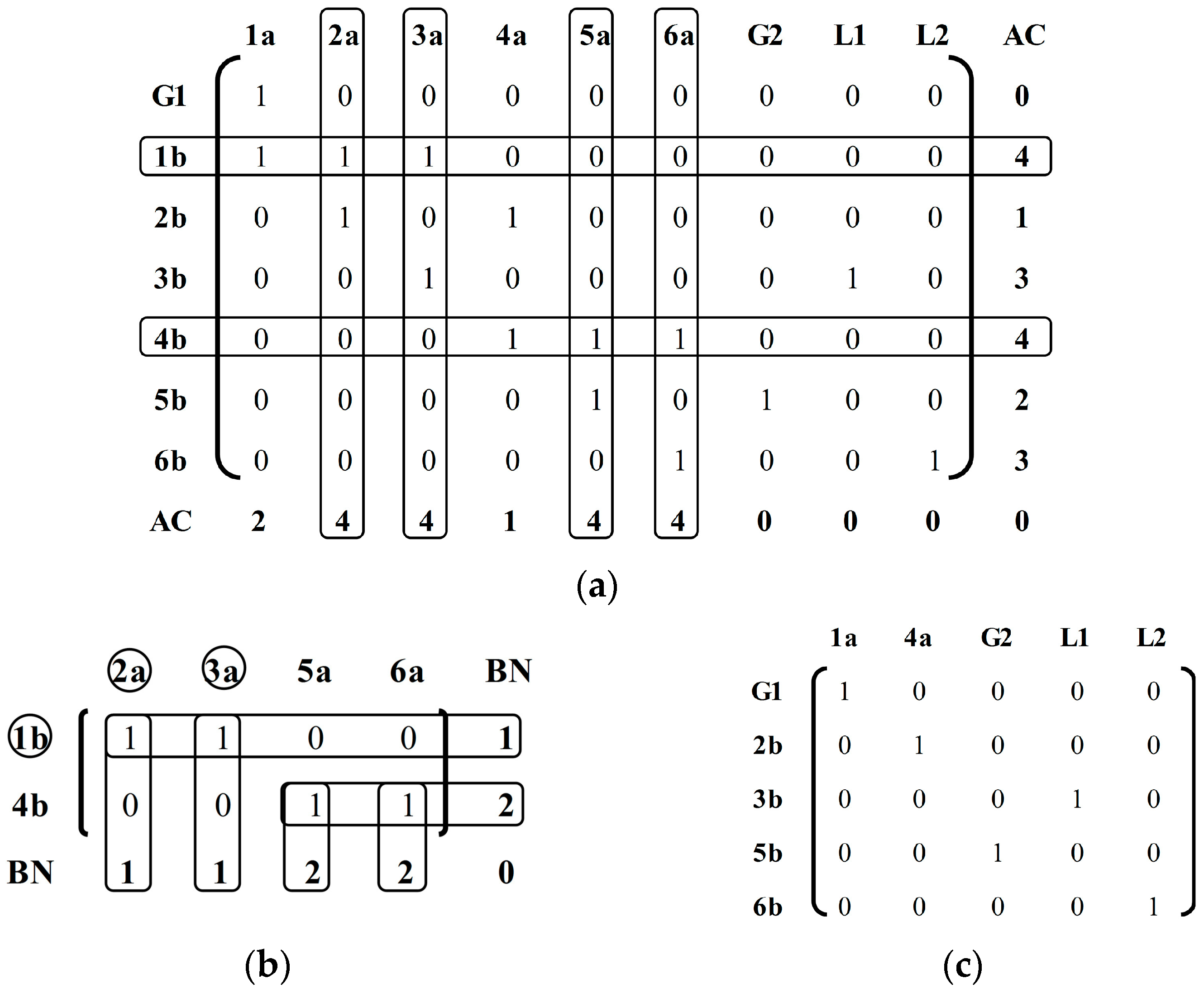
2.2.2. Step 2: Construct the Conversion Table from CM and the Modified BM
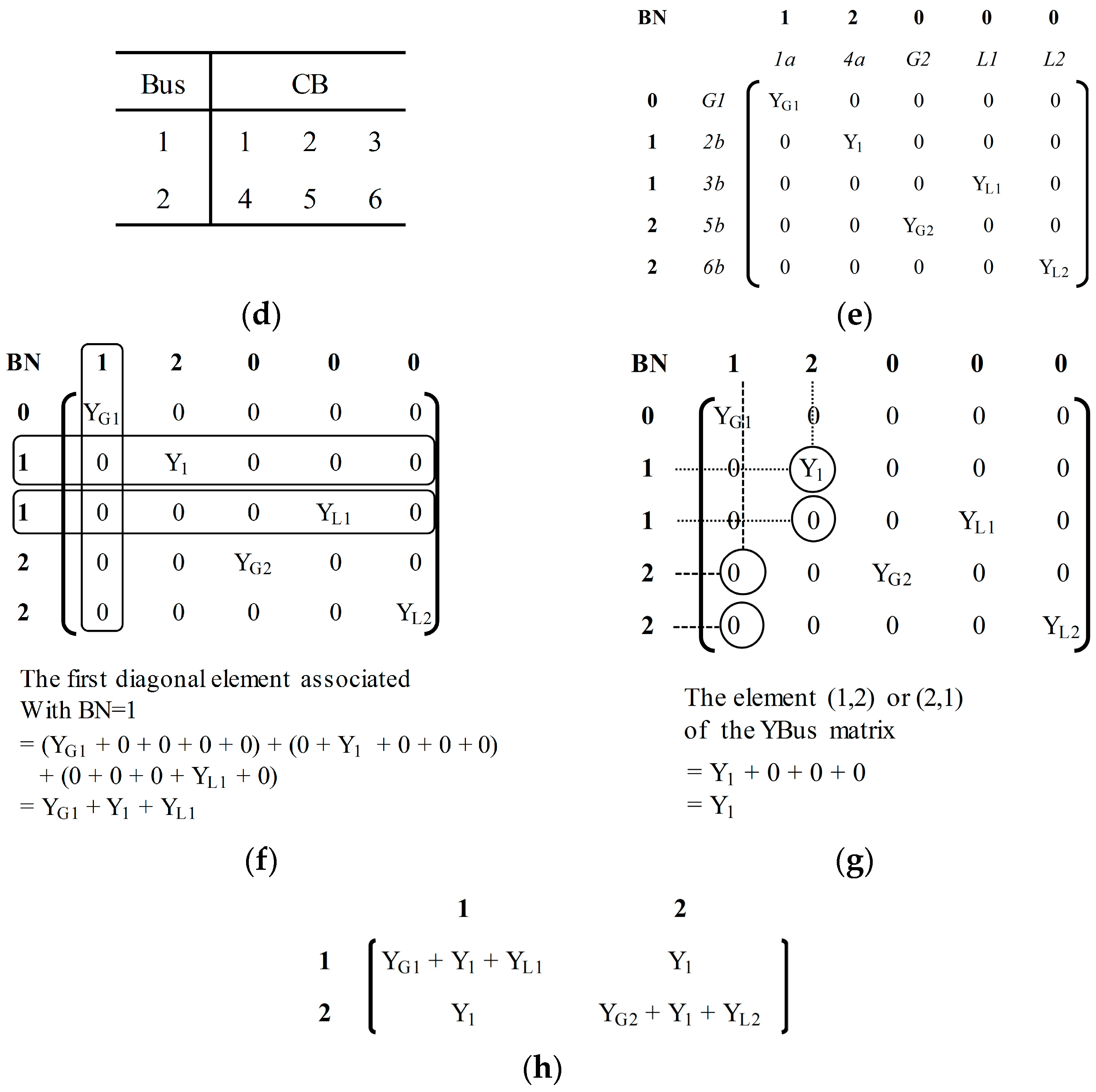
2.2.3. Step 3: Complete the YBus matrix
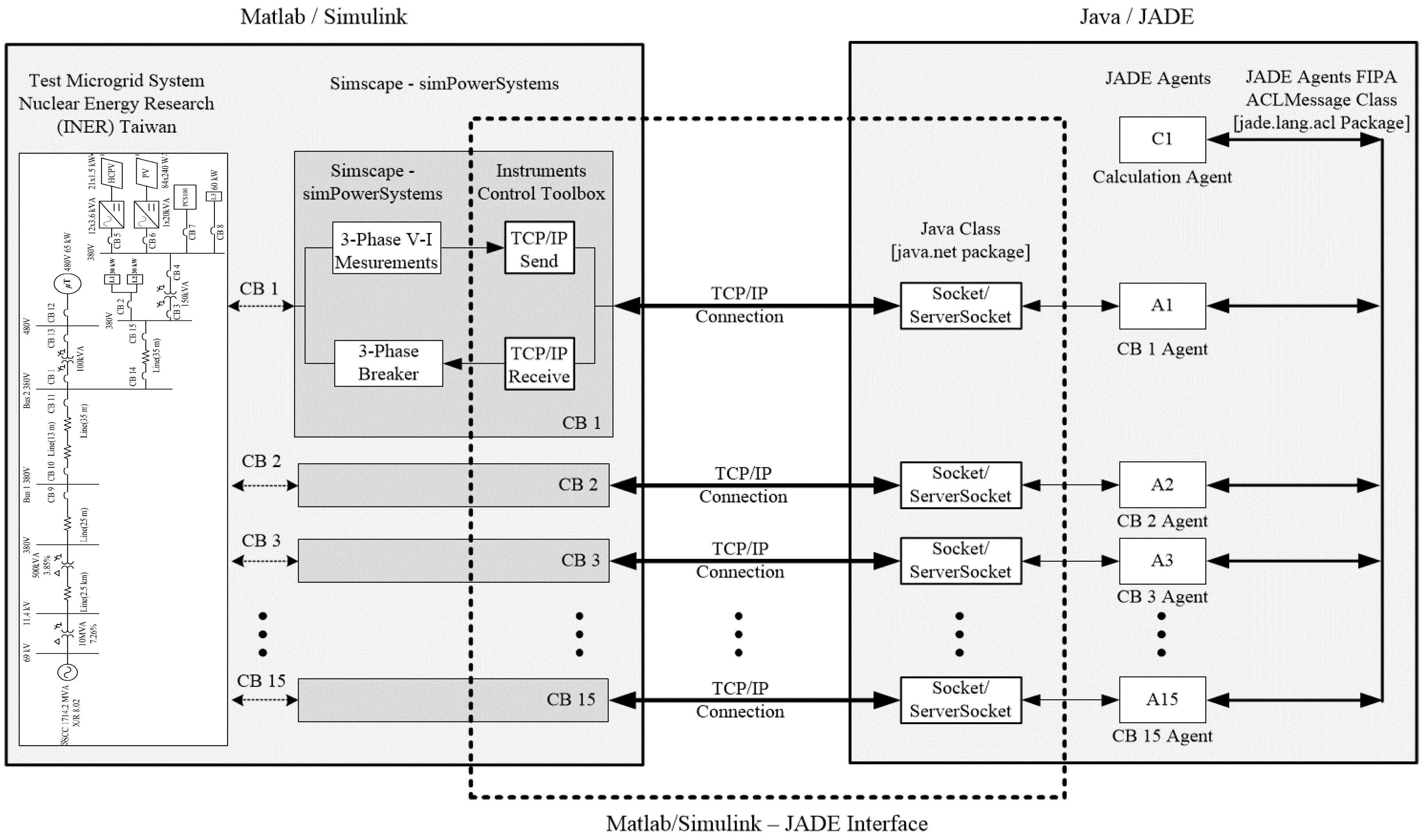
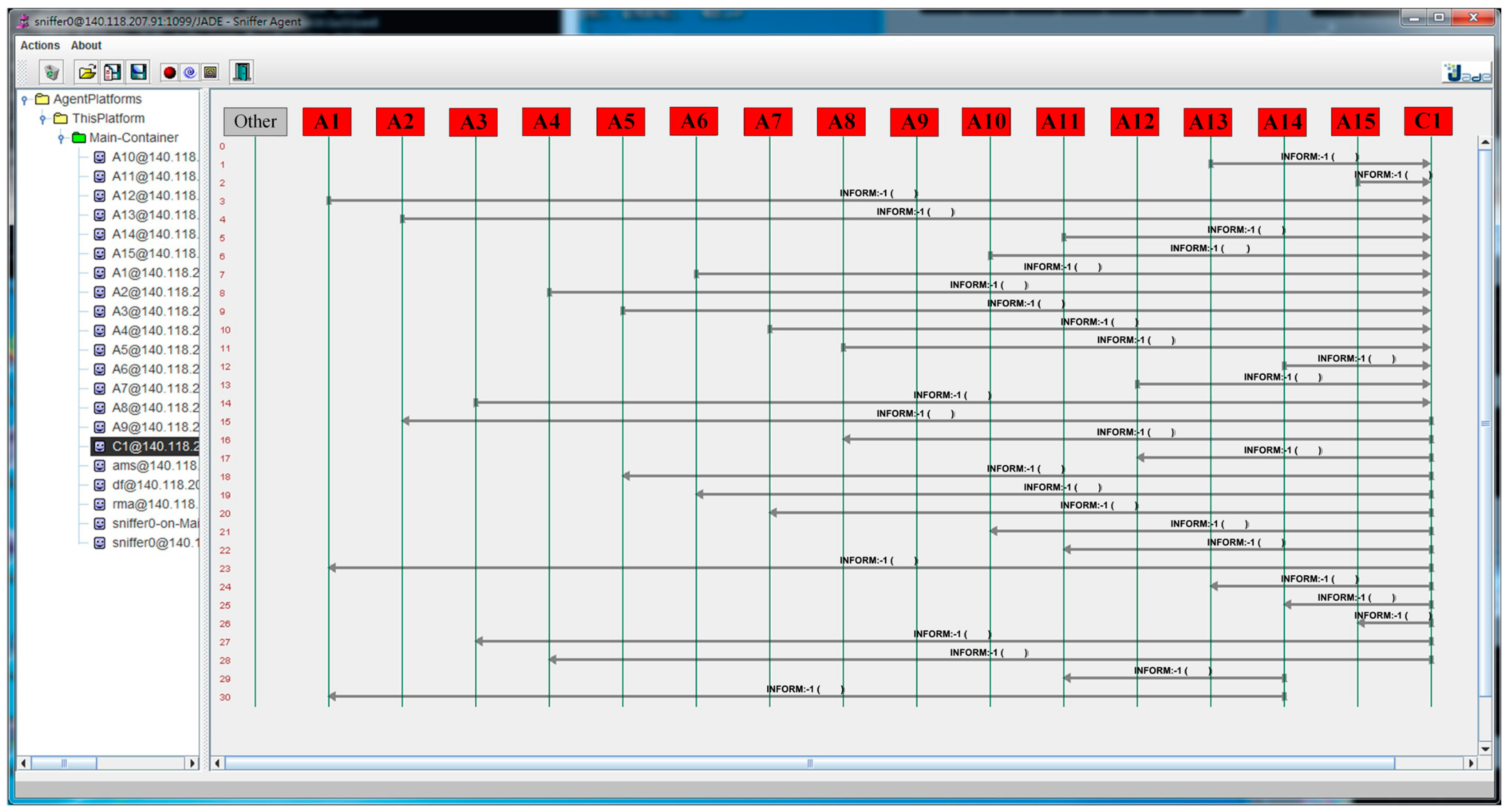
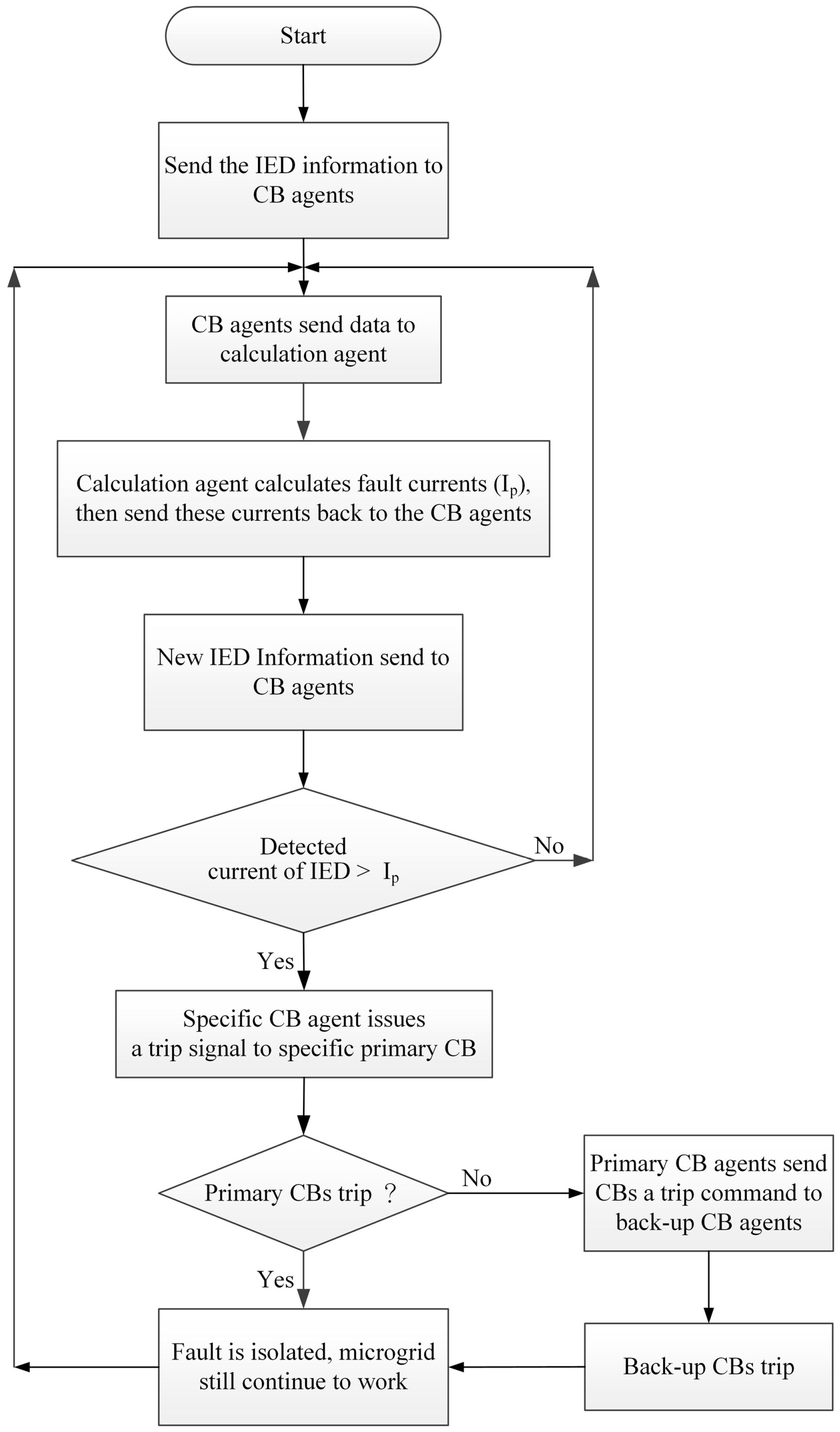
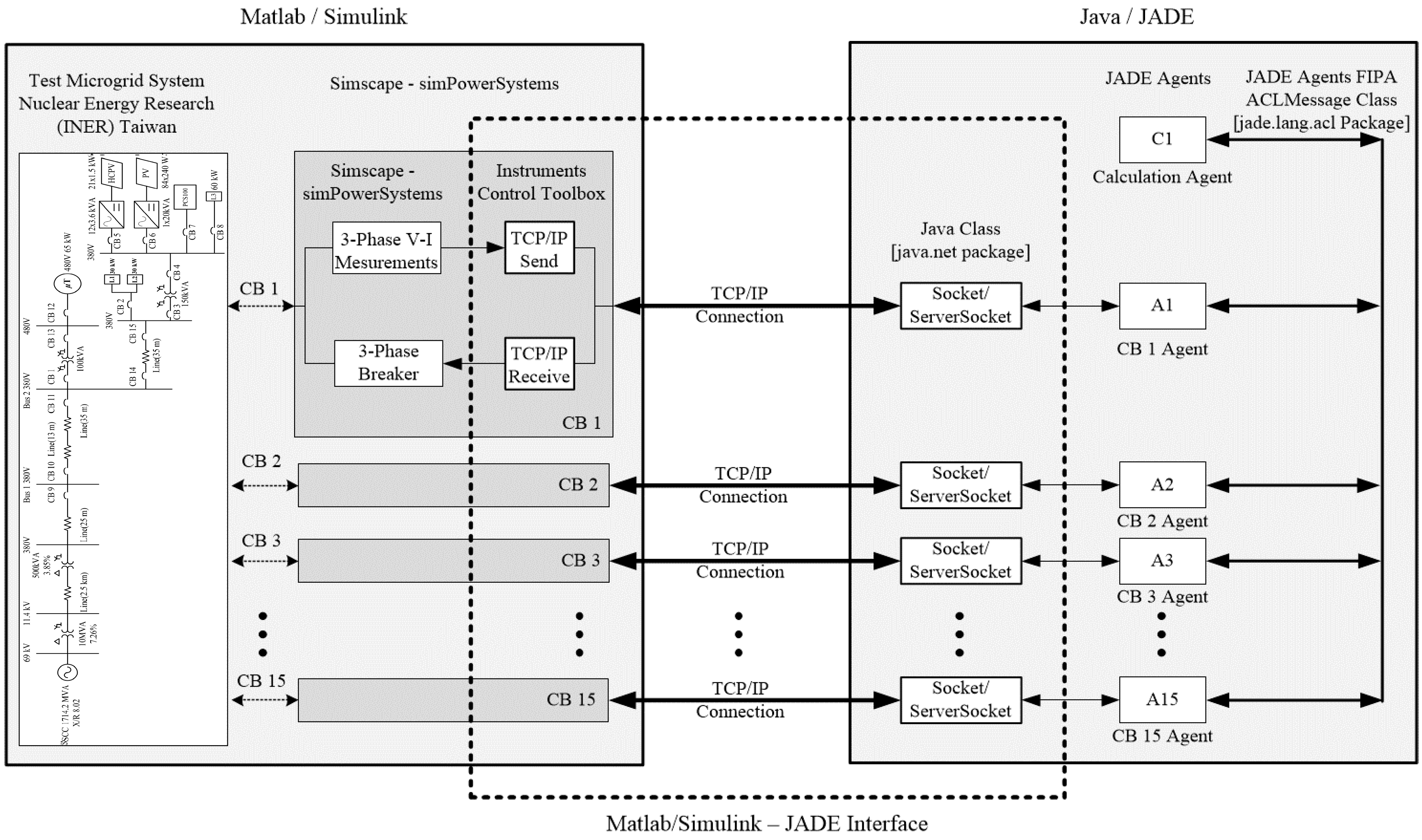
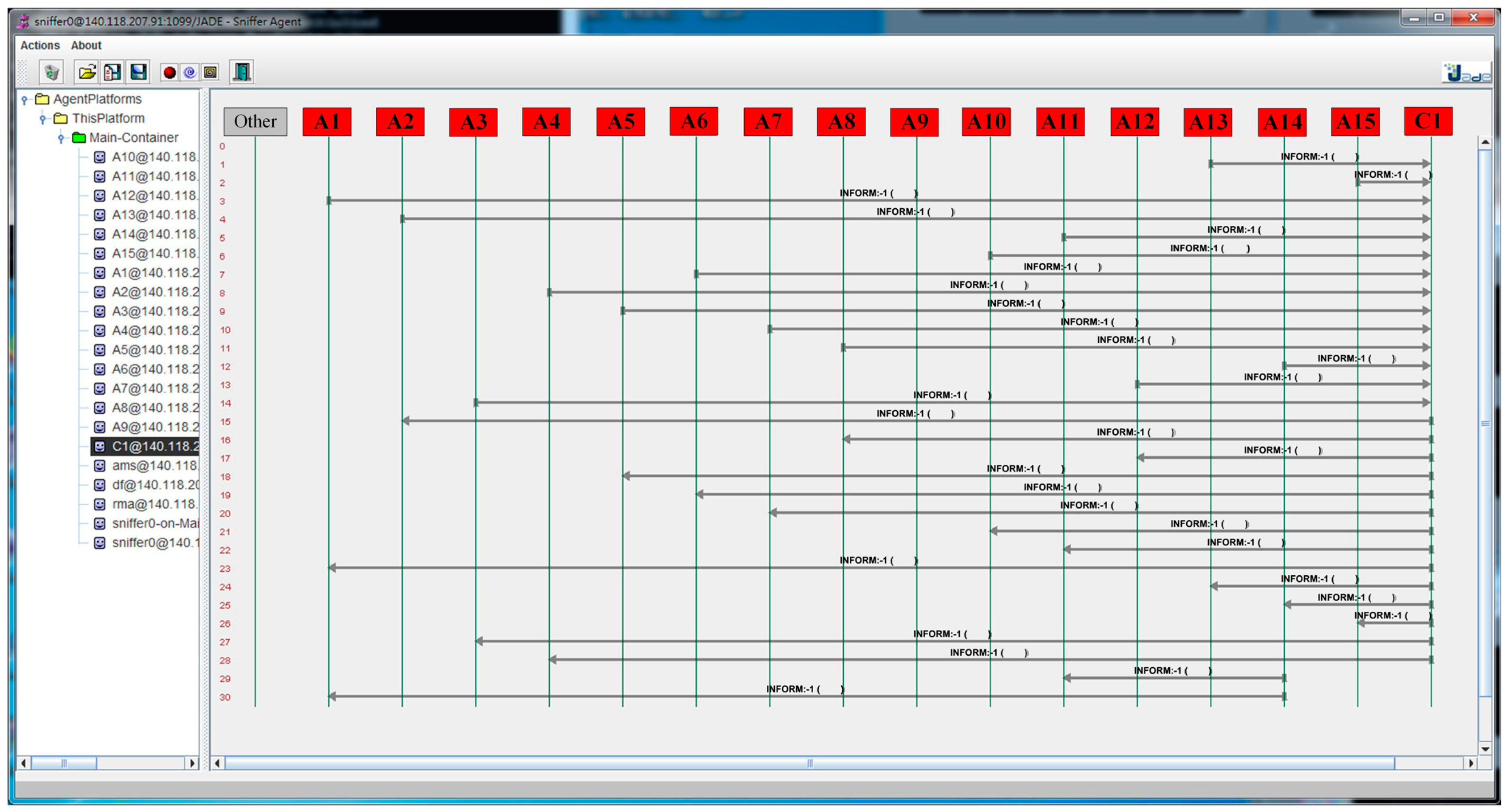
3. Multi-Agent System for Microgrid Protection Coordination
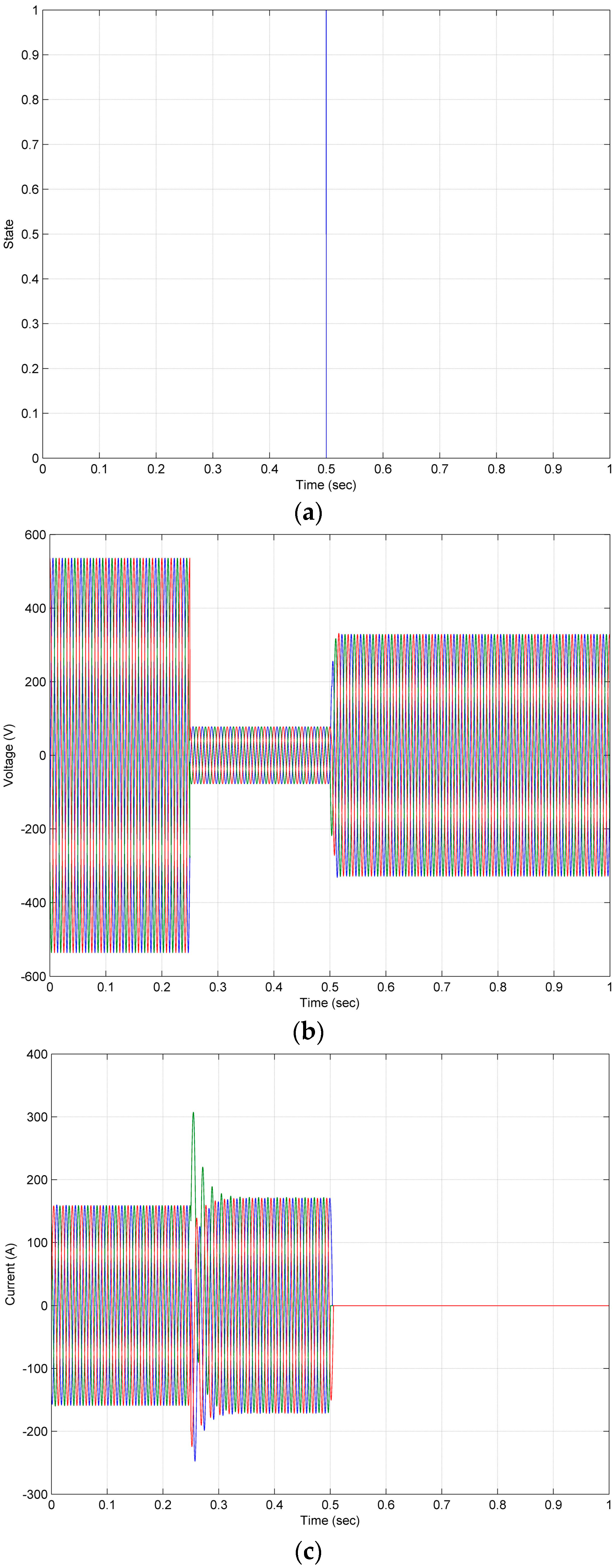
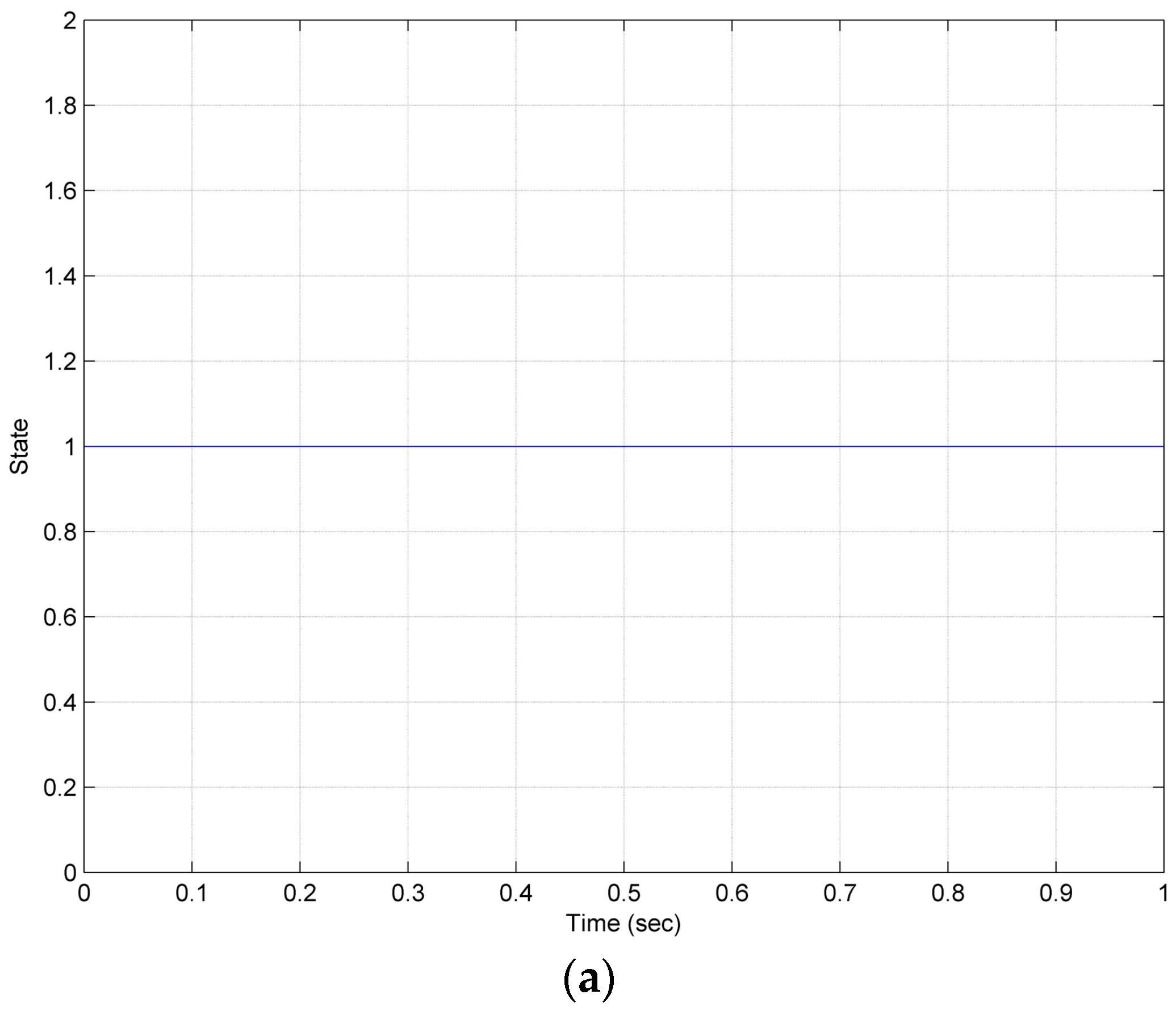
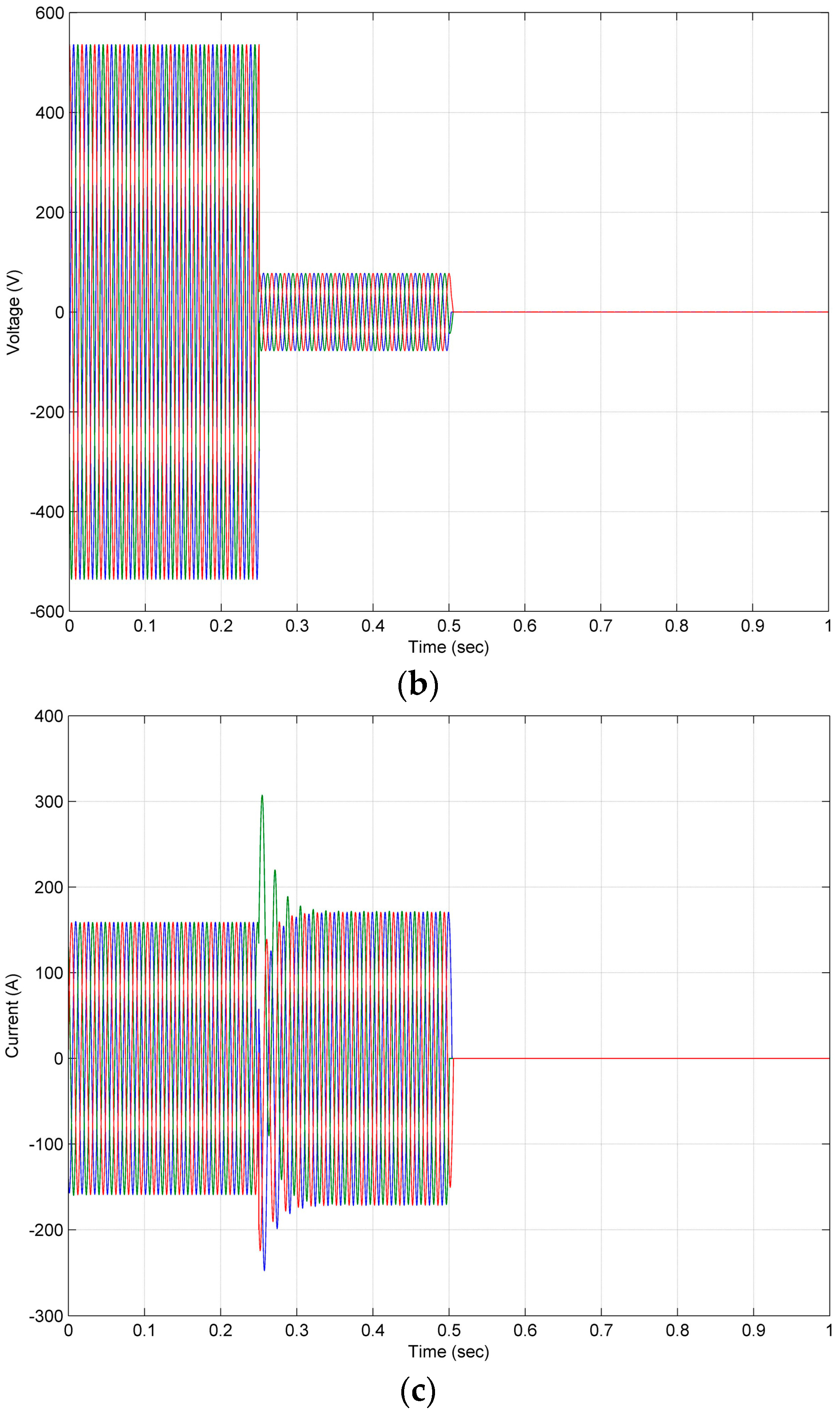
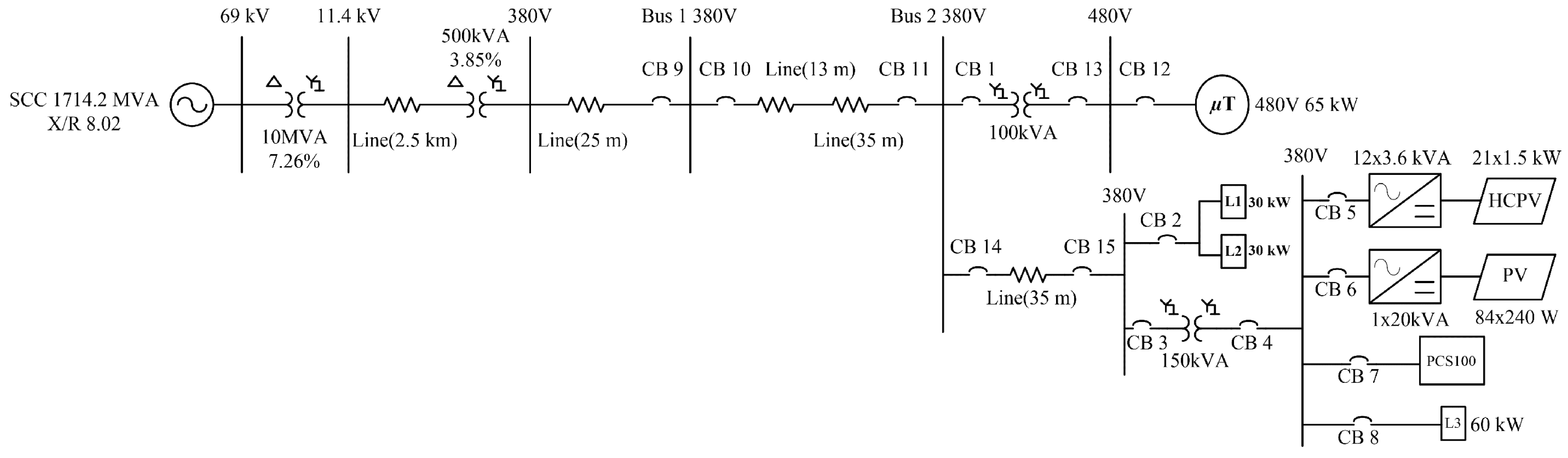
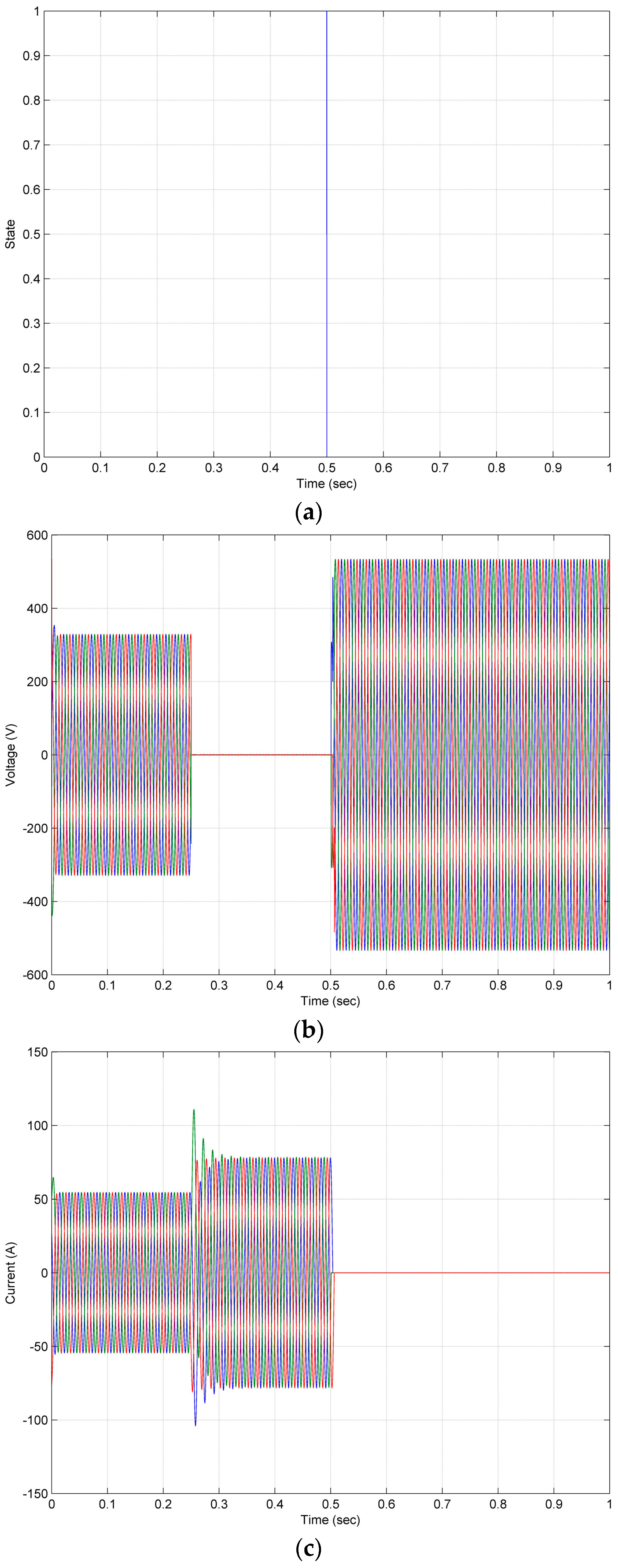
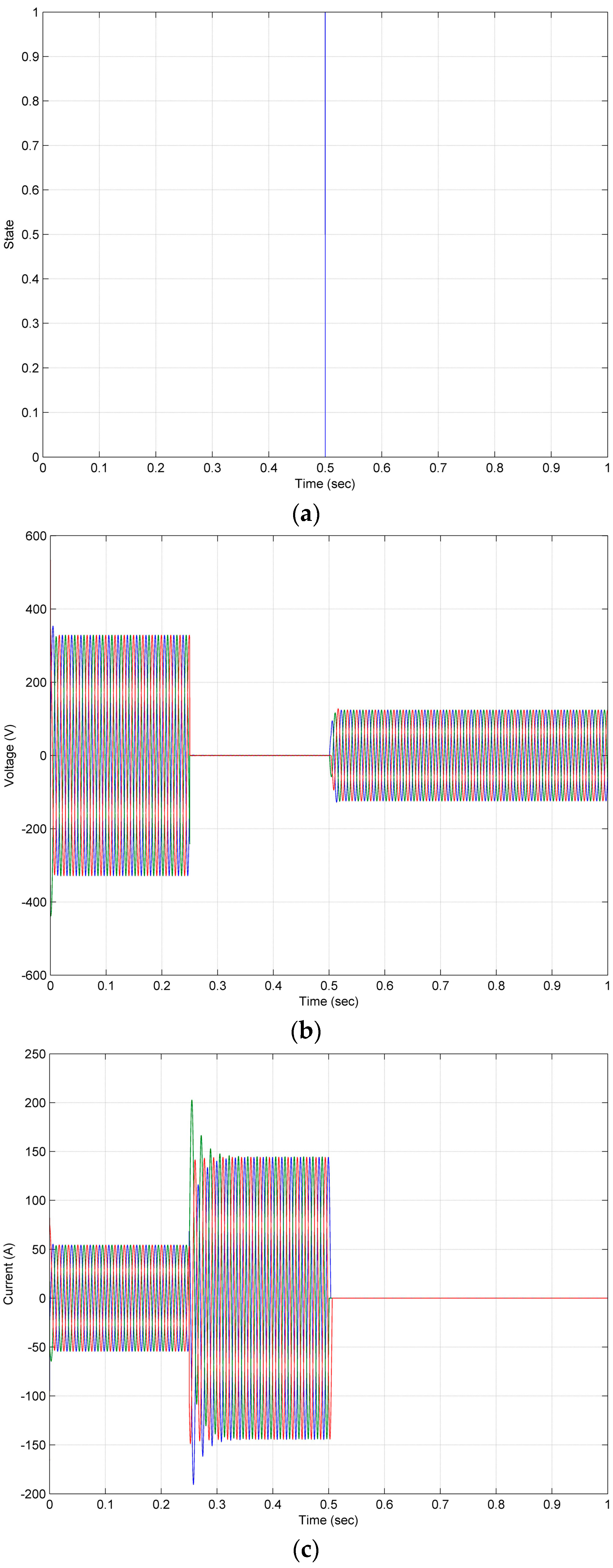
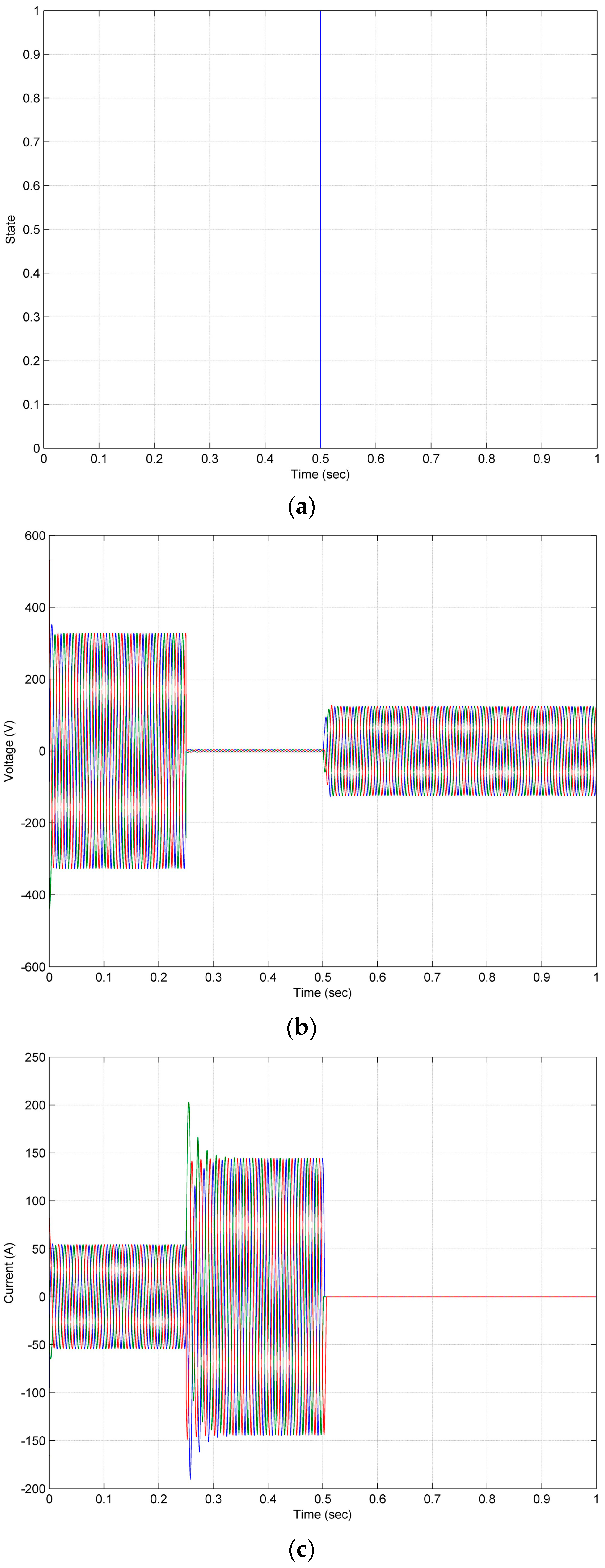
4. Simulation Results and Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| AC | Agent Code |
| BM | Base Matrix |
| CB | Circuit Breaker |
| CM | Conversion Matrix |
| DER | Distributed Energy Resource |
| FIPA | Foundation for Intelligent Physical Agents |
| HCPV | High Concentrator Photovoltaics |
| IED | Intelligent Electronic Devices |
| INER | Institute Nuclear Energy Research (in Taoyuan, Taiwan) |
| Ip | Pick-up Current |
| JADE | Java Agent Development Framework |
| MAS | Multi-Agent System |
| NTP | Network Topology Processor |
| PV | Photovoltaics |
| TCB | Tripped-CB Number |
| TCB.a | Tripped-CB Number Side “a” |
| TCB.b | Tripped-CB Number Side “b” |
| TM | Topology Matrix |
| μT | Micro-Turbine |
References
- Gu, J.-C.; Yang, M.-T.; Chen, J.-D.; Chung, H.-Y.; Wang, C.-Y.; Chang, Y.-R.; Lee, Y.-D.; Chan, C.-M.; Hsu, C.-H. Application of multi-agent systems to microgrid fault protection coordination. In Proceedings of the 2016 International Symposium on Computer, Consumer and Control (IS3C), Xi’an, China, 4–6 July 2016; pp. 188–191.
- Zeng, X.; Li, K.K.; Chan, W.L.; Su, S. Multi-agents based protection for distributed generation systems. In Proceedings of the 2004 IEEE International Conference on Electric Utility Deregulation, Restructuring and Power Technologies, Honkong, China, 5–8 April 2004; pp. 393–397.
- Logenthiran, T.; Srinivasan, D.; Khambadkone, A.; Aung, H. Scalable multi-agent system (MAS) for operation of a microgrid in islanded mode. In Proceedings of the 2010 Joint International Conference on Power Electronics, Drives and Energy Systems (PEDES) & 2010 Power, New Delhi, India, 20–23 December 2010; pp. 1–6.
- Aung, H.N.; Khambadkone, A.; Srinivasan, D.; Logenthiran, T. Agent-based intelligent control for real-time operation of a microgrid. In Proceedings of the 2010 Joint International Conference on Power Electronics, Drives and Energy Systems (PEDES) & 2010 Power, New Delhi, India, 20–23 December 2010; pp. 1–6.
- Macken, K.J.; Bollen, M.H.; Belmans, R.J. Mitigation of voltage dips through distributed generation systems. In Proceedings of the 38th IAS Annual Meeting Record of the Industry Applications Conference, Salt Lake, UT, USA, 12–16 October 2003; pp. 1068–1074.
- Kang, H.-K.; Chung, I.-Y.; Moon, S.-I. Voltage control method using distributed generators based on a multi-agent system. Energies 2015, 8, 14009–14025. [Google Scholar] [CrossRef]
- Zhang, J.; Ai, Q.; Jiang, C.; Wang, X.; Zheng, Z.; Gu, C. The application of multi agent system in microgrid coordination control. In Proceedings of the 2009 International Conference on Sustainable Power Generation and Supply, Nanjing, China, 6–7 April 2009; pp. 1–6.
- Eddy, F.Y.; Gooi, H. Multi-agent system for optimization of microgrids. In Proceedings of the 2011 IEEE 8th International Conference on Power Electronics and ECCE Asia (ICPE & ECCE), Jeju, Korea, 30 May–3 June 2011; pp. 2374–2381.
- Kantamneni, A.; Brown, L.E.; Parker, G.; Weaver, W.W. Survey of multi-agent systems for microgrid control. Eng. Appl. Artif. Intell. 2015, 45, 192–203. [Google Scholar] [CrossRef]
- Logenthiran, T.; Srinivasan, D.; Khambadkone, A.; Aung, H. Multi-agent system (mas) for short-term generation scheduling of a microgrid. In Proceedings of the 2010 IEEE International Conference on Sustainable Energy Technologies (ICSET), Kandy, Sri Lanka, 6–9 December 2010; pp. 1–6.
- Zheng, W.-D.; Cai, J.-D. A multi-agent system for distributed energy resources control in microgrid. In Proceedings of the 2010 5th International Conference on Critical Infrastructure (CRIS), Beijing, China, 20–22 September 2010; pp. 1–5.
- Logenthiran, T.; Srinivasan, D.; Wong, D. Multi-agent coordination for der in microgrid. In Proceedings of the 2008 IEEE International Conference on Sustainable Energy Technologies, Singapore, 24–27 November 2008; pp. 77–82.
- Dou, X.; Quan, X.; Wu, Z.; Hu, M.; Yang, K.; Yuan, J.; Wang, M. Hybrid multi-agent control in microgrids: Framework, models and implementations based on iec 61850. Energies 2014, 8, 31–58. [Google Scholar] [CrossRef]
- Li, C.; Savaghebi, M.; Guerrero, J.M.; Coelho, E.A.; Vasquez, J.C. Operation cost minimization of droop-controlled ac microgrids using multiagent-based distributed control. Energies 2016, 9, 717. [Google Scholar] [CrossRef]
- Lim, Y.; Kim, H.-M.; Kinoshita, T. Distributed load-shedding system for agent-based autonomous microgrid operations. Energies 2014, 7, 385–401. [Google Scholar] [CrossRef]
- Cha, H.-J.; Won, D.-J.; Kim, S.-H.; Chung, I.-Y.; Han, B.-M. Multi-agent system-based microgrid operation strategy for demand response. Energies 2015, 8, 14272–14286. [Google Scholar] [CrossRef]
- Logenthiran, T.; Naayagi, R.T.; Woo, W.L.; Phan, V.-T.; Abidi, K. Intelligent control system for microgrids using multiagent system. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 1036–1045. [Google Scholar] [CrossRef]
- Eddy, Y.F.; Gooi, H.B.; Chen, S.X. Multi-agent system for distributed management of microgrids. IEEE Trans. Power Syst. 2015, 30, 24–34. [Google Scholar] [CrossRef]
- Sachdev, M.; Sidhu, T.; Talukdar, B. Topology detection for adaptive protection of distribution networks. In Proceedings of the 1995 International Conference on Energy Management and Power Delivery (EMPD’95), Singapore, 21–23 November 1995; pp. 445–450.
- Pandit, S.; Soman, S.A.; Khaparde, S.A. Object-oriented network topology processor power system automation. IEEE Comput. Appl. Power 2001, 14, 42–46. [Google Scholar] [CrossRef]
- Piereti, S.A.R.; Delbem, A.C.B.; London, J.B.A.; Bretas, N.G. Tracking network topology processor using node-depth representation. In Proceedings of the 2007 IEEE Lausanne Power Tech, Lausanne, Switzerland, 1–5 July 2007; pp. 143–148.
- Prais, M.; Bose, A. A topology processor that tracks network modifications. IEEE Trans. Power Syst. 1988, 3, 992–998. [Google Scholar] [CrossRef]
- Rui, S.; Zhongyu, W.; Centeno, V.A. Power system islanding detection & identification using topology approach and decision tree. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011; pp. 1–6.
- Yajing, G.; Zhanlong, Z.; Wenchuan, W.; Haifeng, L. A method for the topology identification of distribution system. In Proceedings of the 2013 IEEE, Power and Energy Society General Meeting (PES), Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5.
- Arghandeh, R.; Gahr, M.; von Meier, A.; Cavraro, G.; Ruh, M.; Andersson, G. Topology detection in microgrids with micro-synchrophasors. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Code | Connection Node Type |
|---|---|
| 1 | Line |
| 2 | Generator (G) |
| 3 | Load (L) |
| 4 | Bus (B) |
| 0 | Others |
| IED | Pick-Up Current (Unit: A) | |
|---|---|---|
| Grid-Connected Mode | Islanded Mode | |
| 1 | 3358.99 | 90.58 |
| 2 | 135.15 | 83.41 |
| 3 | 3070.55 | 92.15 |
| 4 | 3070.55 | 92.15 |
| 5 | 45.98 | 52.12 |
| 6 | 45.98 | 52.12 |
| 7 | 45.98 | 52.12 |
| 8 | 135.07 | 83.55 |
| 9 | 12,789.67 | - |
| 10 | 8818.15 | 141.35 |
| 11 | 8818.15 | 141.35 |
| 12 | 74.04 | 83.16 |
| 13 | 3358.99 | 90.58 |
| 14 | 6312.78 | 92.08 |
| 15 | 6312.78 | 92.08 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ananda, S.A.; Gu, J.-C.; Yang, M.-T.; Wang, J.-M.; Chen, J.-D.; Chang, Y.-R.; Lee, Y.-D.; Chan, C.-M.; Hsu, C.-H. Multi-Agent System Fault Protection with Topology Identification in Microgrids. Energies 2017, 10, 28. https://doi.org/10.3390/en10010028
Ananda SA, Gu J-C, Yang M-T, Wang J-M, Chen J-D, Chang Y-R, Lee Y-D, Chan C-M, Hsu C-H. Multi-Agent System Fault Protection with Topology Identification in Microgrids. Energies. 2017; 10(1):28. https://doi.org/10.3390/en10010028
Chicago/Turabian StyleAnanda, Stephanus Antonius, Jyh-Cherng Gu, Ming-Ta Yang, Jing-Min Wang, Jun-Da Chen, Yung-Ruei Chang, Yih-Der Lee, Chen-Min Chan, and Chia-Hao Hsu. 2017. "Multi-Agent System Fault Protection with Topology Identification in Microgrids" Energies 10, no. 1: 28. https://doi.org/10.3390/en10010028