1. Introduction
Recently, there have been studies into DC distribution systems that can bring advantages over conventional AC distribution systems in terms of energy efficiency, power quality and so on [
1]. Among various applications of DC distribution systems, low-voltage DC (LVDC) distribution systems, whose rated voltage is less than 1500 V, have unique strengths for distribution network operators (DNOs) in that they can supply diverse energy management services by integrating distributed generation or storage units into local distribution networks [
2,
3]. The first commercial application of a LVDC distribution system was built in Finland in 2012, and has been successfully tested for more than 3500 h, as explained in [
2].
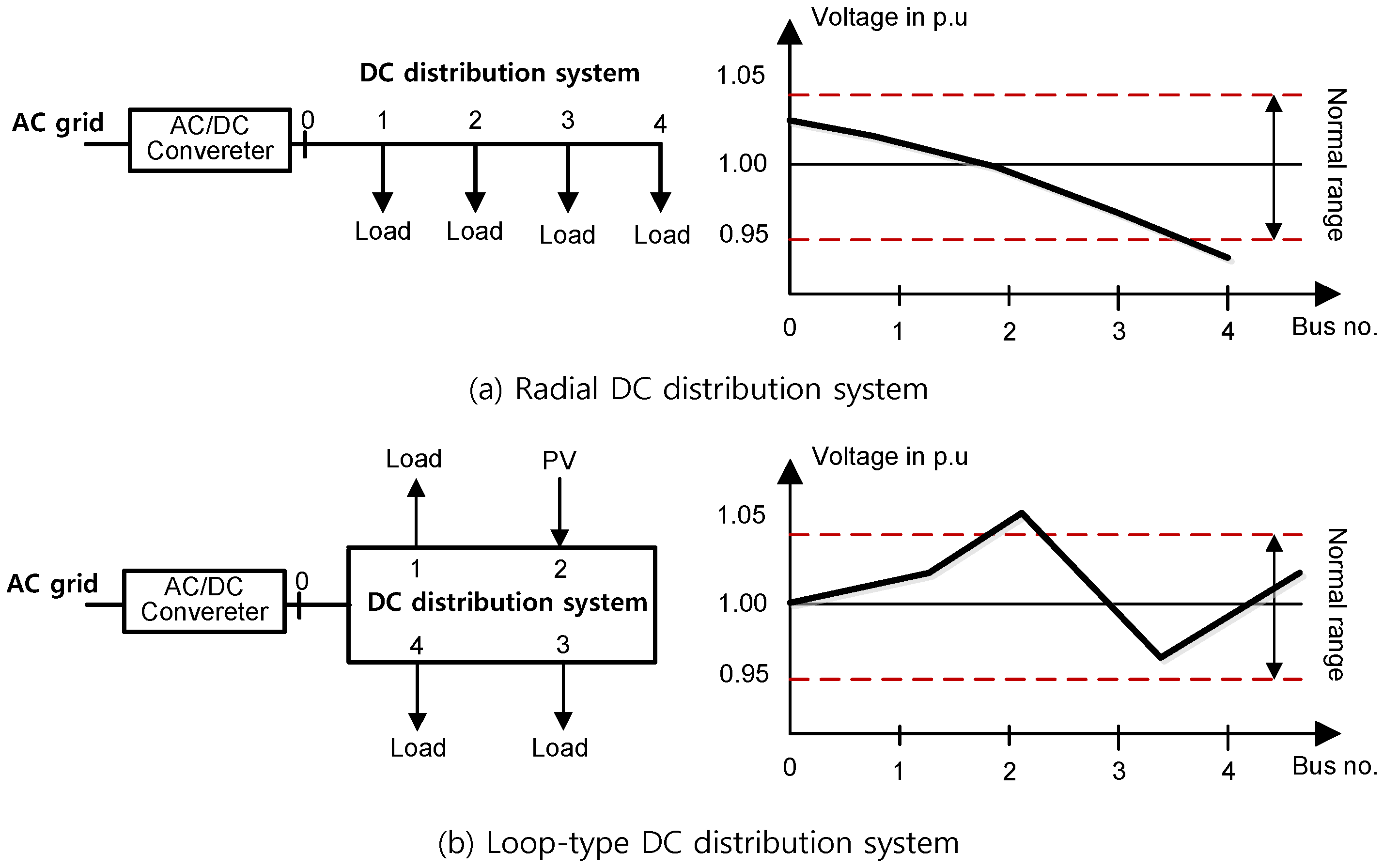
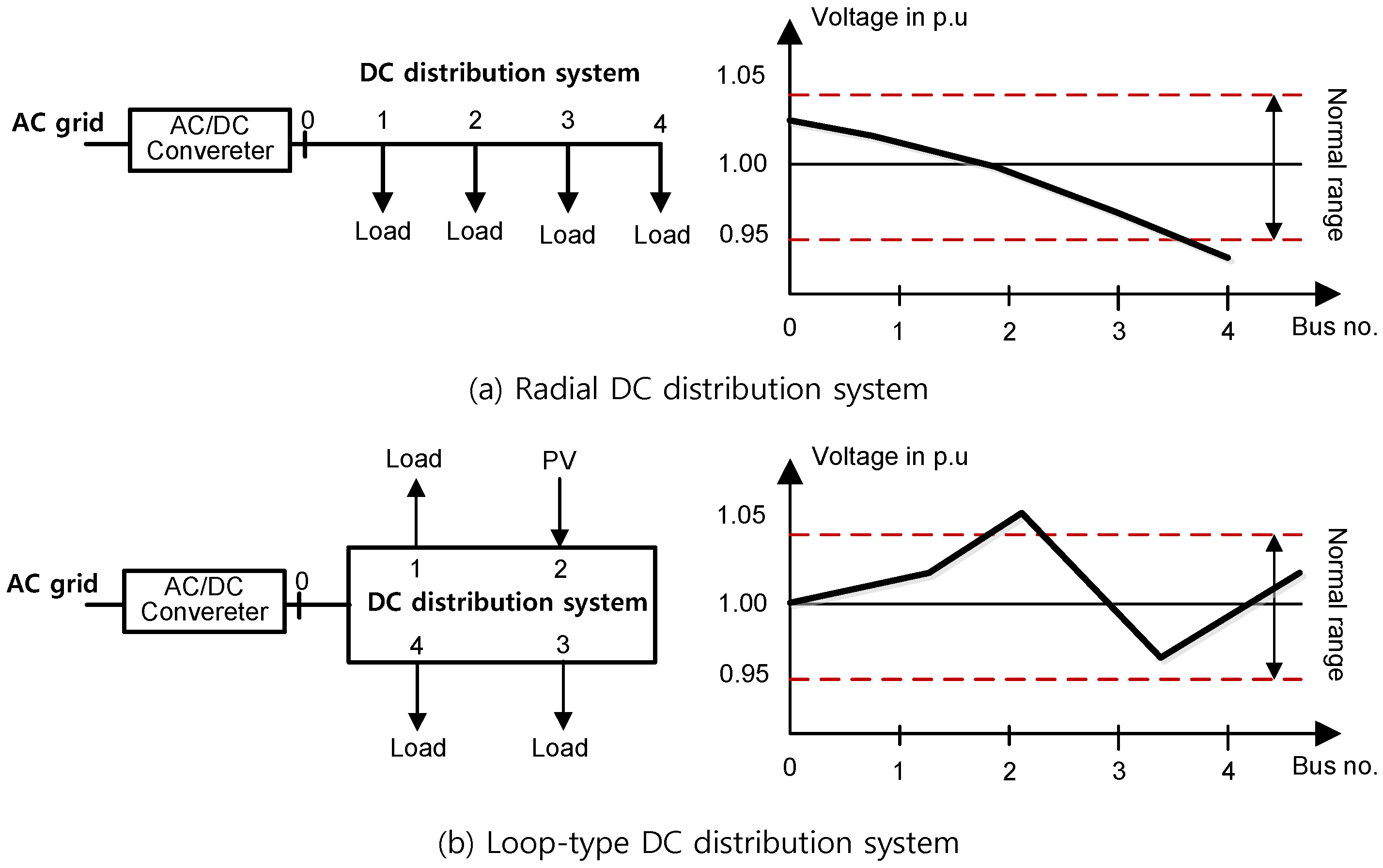
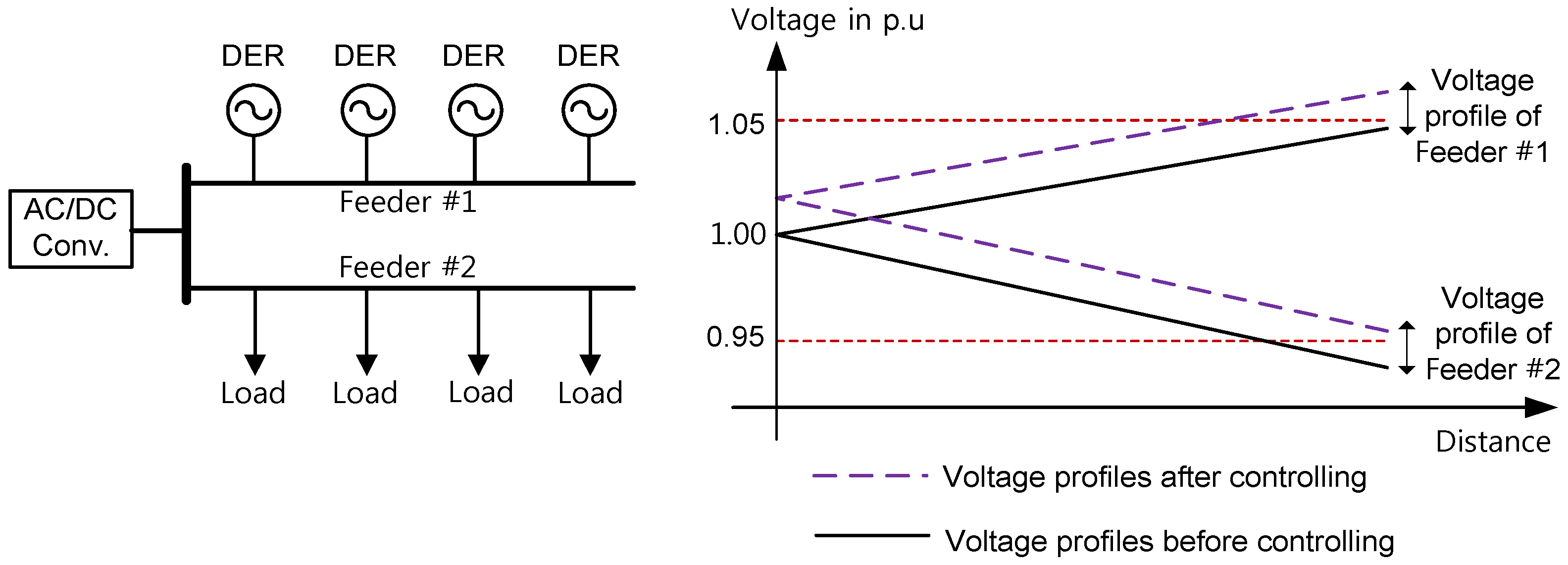
In LVDC distribution systems, voltage regulation is one of the most significant issues for their planning and operation because it mainly defines the quality of the distributed electricity. The main objective of voltage regulation is to maintain the voltage within certain ranges that can guarantee voltage stability and service quality of the distribution system. There are some on-going discussions about the acceptable voltage range for LVDC distribution systems. In this paper, the normal voltage range is defined as ±5% of the rated voltage under the assumption that we need to supply the same voltage quality to the customers as AC distribution systems. According to the American National Standard (ANSI) for distribution systems [
4].
There have been many studies into voltage control methods in AC distribution systems. Their basic approach is to manipulate the tap position of the distribution transformers. On top of the basic solution, some researchers have considered voltage regulators such as static VAR compensators (SVCs) as local voltage compensators. References [
5,
6,
7] proposed to how to coordinate a voltage regulator and an on-load tap changer (OLTC). The authors in [
8] proposed a local coordination scheme between an OLTC and shunt capacitors in the presence of synchronous generating units with coordinating actions with time delay.
To coordinate multiple control units, some researchers have proposed the application of a multi-agent system (MAS) to system-wide voltage control. A MAS can be defined as a system comprising multiple intelligent agents that have the abilities of autonomous decision-making and communication with other agents [
9,
10]. In [
11,
12], the authors suggested an agent-based algorithm to control the reactive power output of distributed energy resources (DERs) for proper voltage regulation with a few communication requirements. However, they did not consider the coordination between OLTC and DERs.
There have been studies about voltage control issues for DC distribution systems. However, many of them are focused on small-scale DC systems with limited service areas. If the distribution line is short, the line voltage can be considered as the common parameter over the system such as the frequency in AC distribution system. In [
13,
14], the authors have supposed a local voltage control method by using DERs with droop control concepts to control the common bus voltage on DC distribution system.
However, their approaches are difficult to apply to a long-distance LVDC distribution systems because the DERs are connected to different buses with different voltages. To solve this problem, the authors in [
15] suggested a multi-agent control scheme for voltage regulation in DC distribution systems. In [
15], two sequential stages were proposed: one for the AC/DC converter operation and the other for DER control strategies. However, the authors neglected loss and voltage drop in the lines to simplify the computation process so that their method can be prone to computation error if the line lengths are extended. The authors in [
16] derived simplified equations describing voltage sensitivity factors (
VSFs) for voltage control. However, because they assumed radial networks, it is difficult to apply the equations to more complicated configurations such as loop or meshed networks.
This paper proposes a new voltage control method by coordinating the main AC/DC converter and DERs scattered in LVDC distribution systems. The main advantages of the proposed control scheme are as follows: first, we calculated the VSFs based on the Jacobian matrix of the system and load flow analysis. This allows us to consider line losses and voltage drops in the distribution lines. In addition, our method can be applied to not only for radial systems, but also ring-type or meshed networks. Second, to reduce the computational burden of the main central controller, we applied MAS to distribute computation process to multiple local agents. Each local agent generates system information to construct the Jacobian matrix of the system using locally measured raw information. In addition, we define “virtual buses” so that local agents can also estimate the voltages in the neighboring buses with precise calculation results. With this concept, we can reduce the number of measurement points to calculate the Jacobian matrix of the system without losing accuracy. This means that the overall system can be economic. The overall decision making procedure is based on contract net protocol (CNP), which can reduce the size of communication data and increase the flexibility of decision making procedure in local agents.
This paper is organized as follows:
Section 2 introduces the important issues of voltage control in LVDC distribution systems. In
Section 3, we propose a new voltage control scheme in LVDC distribution system using a MAS. Lastly, in
Section 4, we verify the effectiveness of the proposed voltage control method in comparison to the conventional methods with various simulation studies.
3. Proposed Voltage Control Scheme Using Multi-Agent Systems
3.1. Multi-Agent System for Voltage Regulation
Section 2 describes the problem of voltage control without coordination between the AC/DC converter and DERs. This subsection proposes a MAS-based voltage regulation method that can coordinate the main AC/DC converter control and multiple DERs. By using the proposed method, the bus voltages in the LVDC distribution system can effectively be maintained within the normal range.
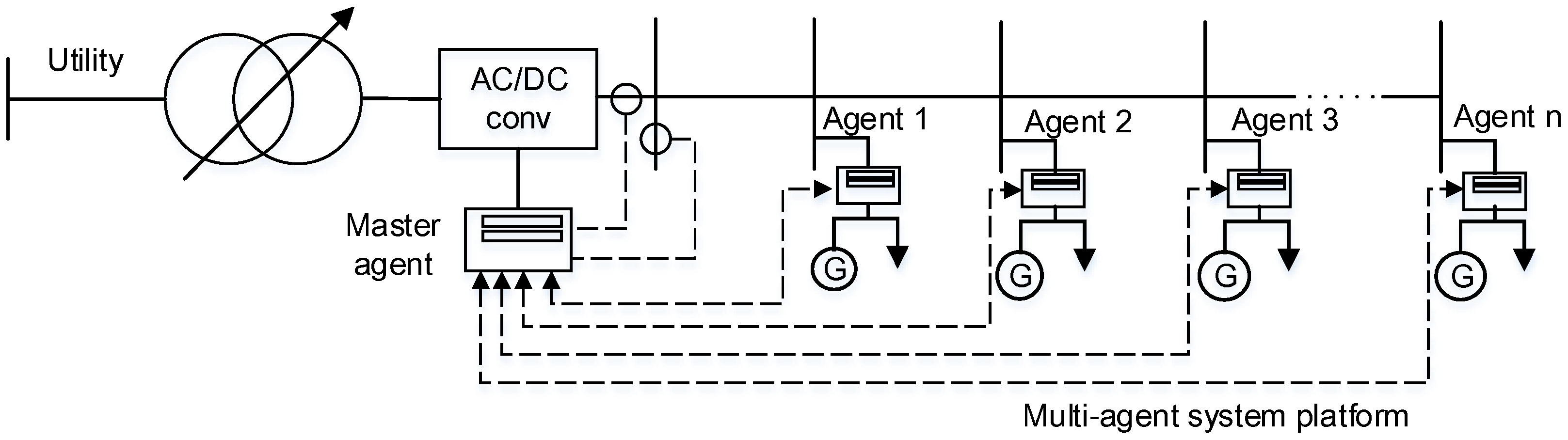
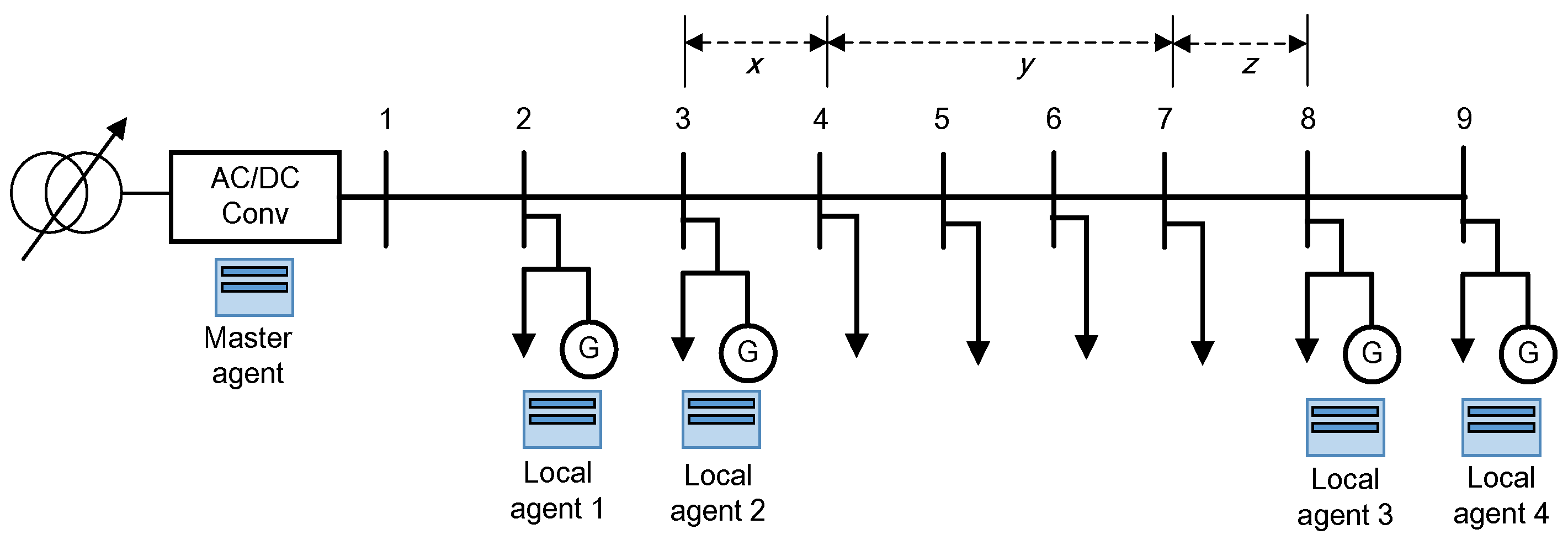
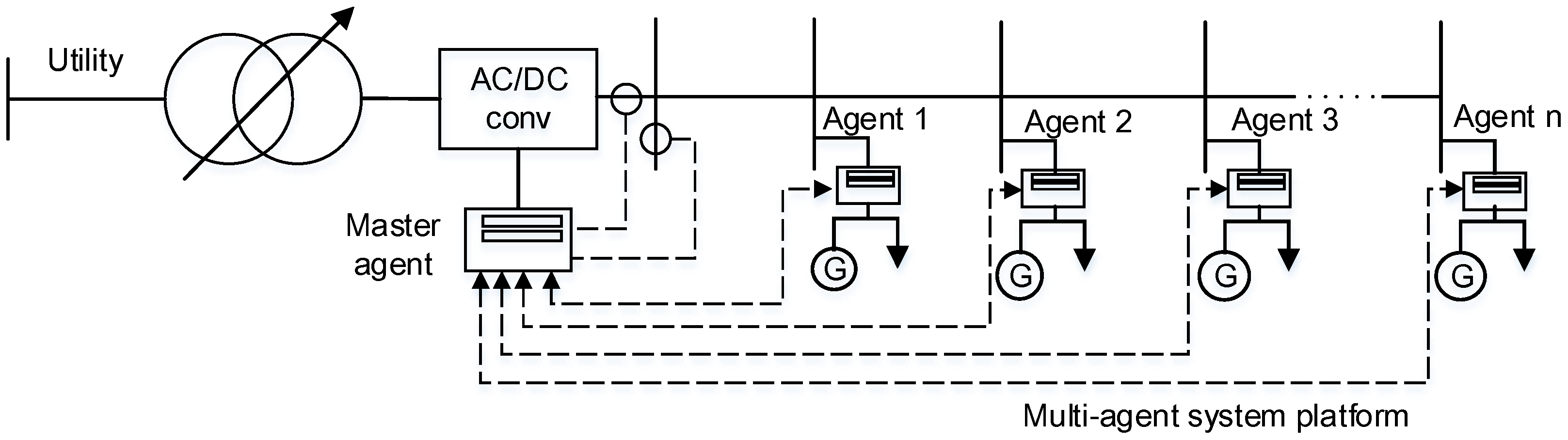
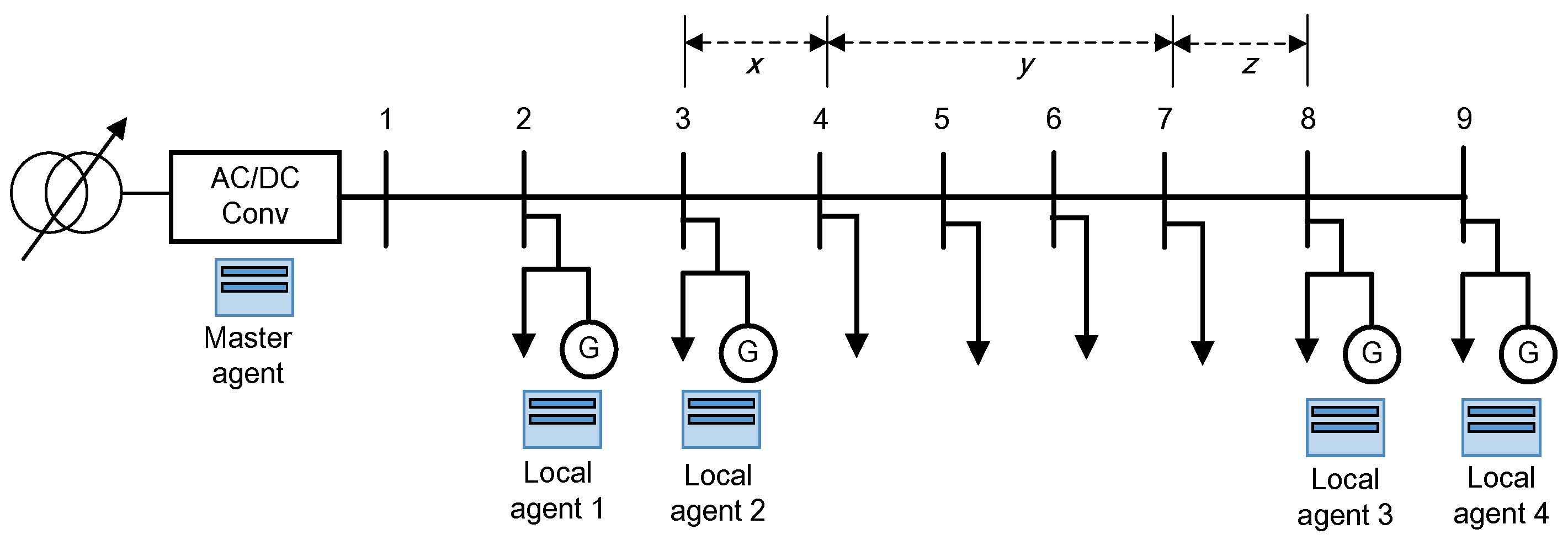
Figure 3 shows the structure of the MAS-based voltage control system. Control agents are classified into two types such as master and local agents. Physically, the master agent links to the controller of the main AC/DC converter and local agents are connected to DER controllers or important monitoring points in the distribution lines.
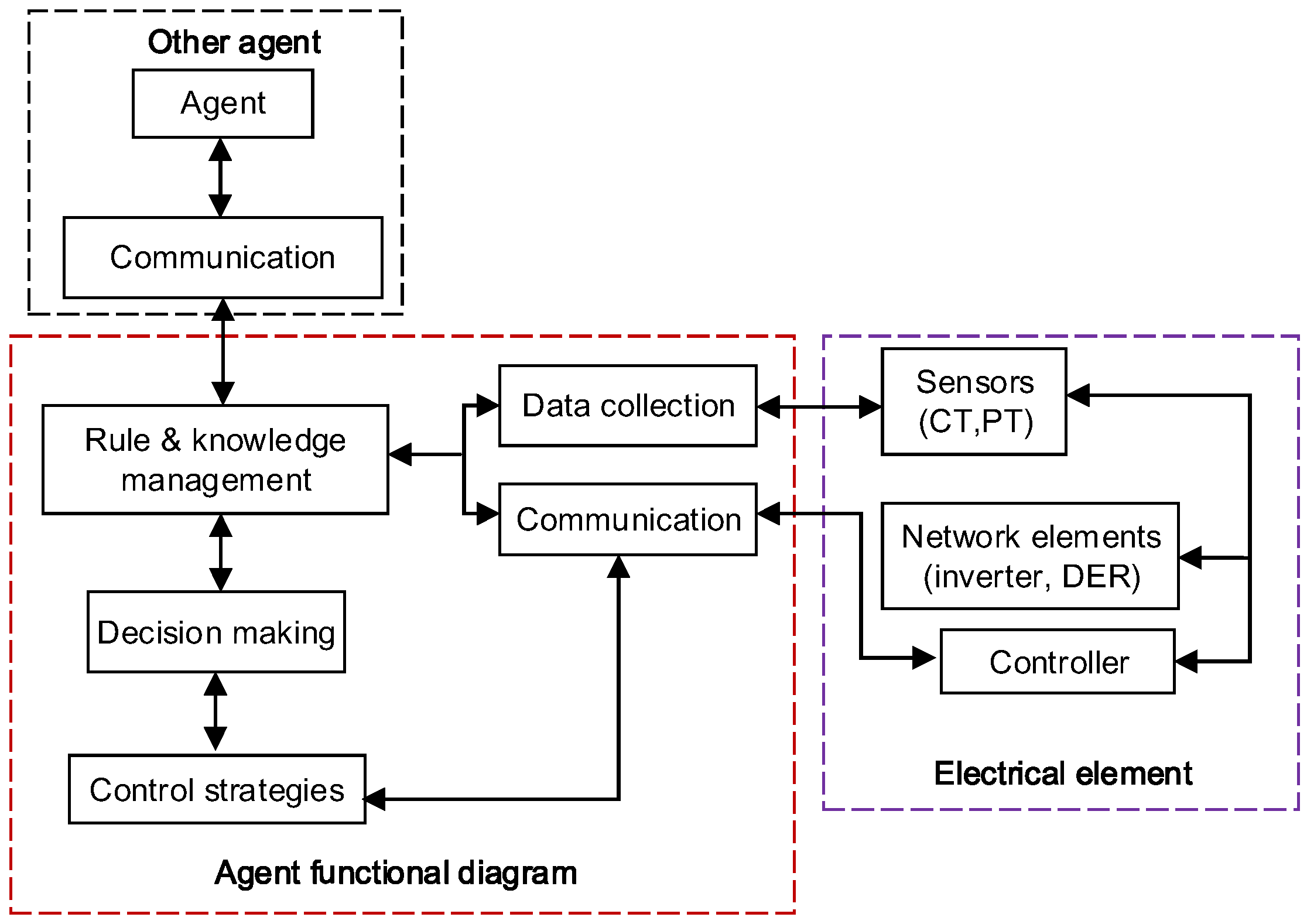
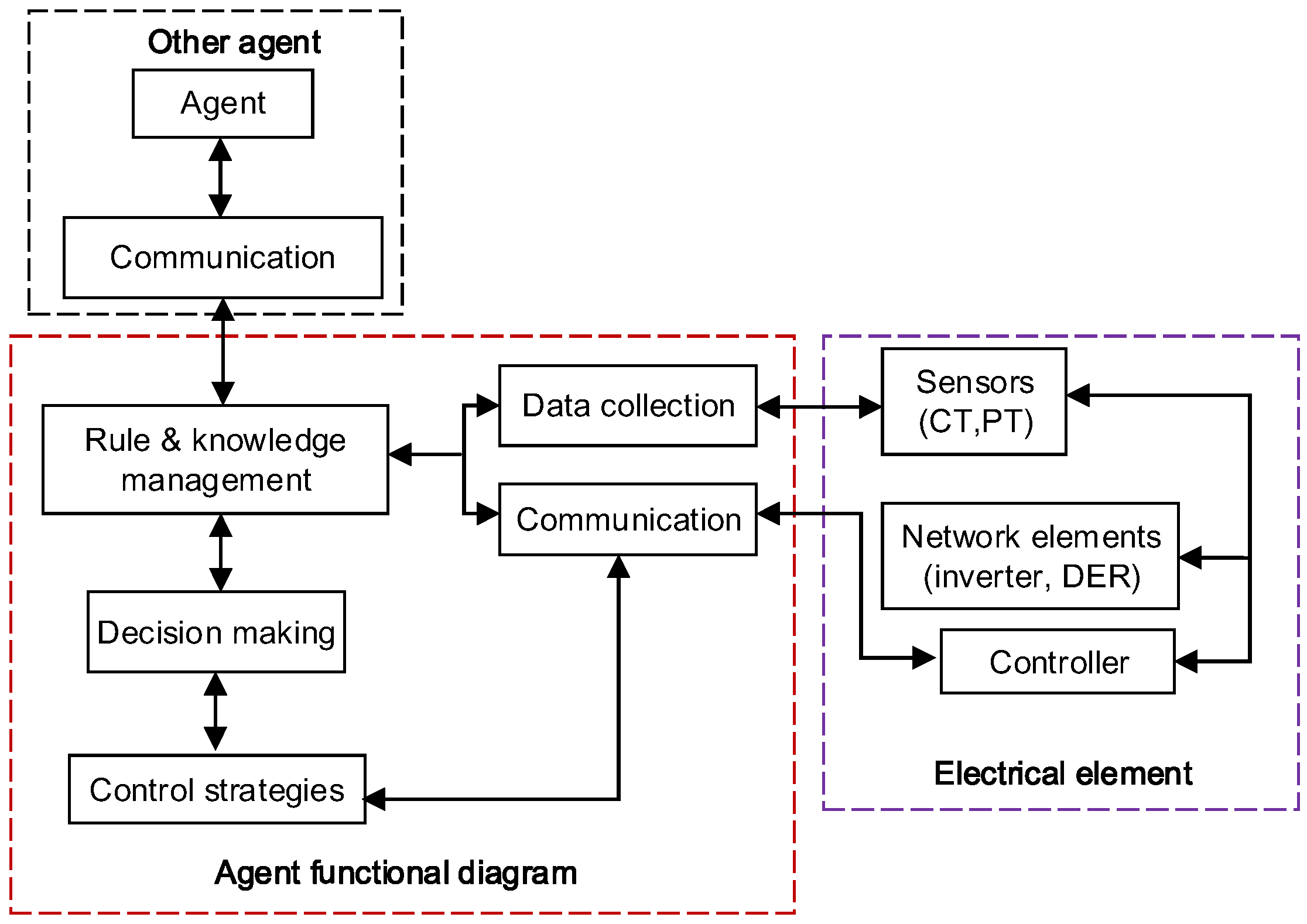
Figure 4 shows an architecture of a control agent for DC distribution network application. The control agents are composed of three main functions: communication, data collection and computation functions. The communication part has two main actions: (1) connection to the other agents to negotiate and exchange data for coordinated tasks and (2) integration with the controller of the AC/DC converter or DER. The data collection function is to measure local data with sensors such as potential transformers (PTs) and current transformers (CTs). The computation function is to monitor voltage events, to calculate power flow analysis, and to make decisions for voltage control actions. Local agents monitor the voltage events and estimate the system parameters to construct the Jacobian matrix. We implemented the decision-making process in the master agent that can assign the dedicated tasks to AC/DC converter and/or DERs to accomplish system wise-voltage control schemes.
We define two types of local agents: DER agent and monitoring agent. Both types of agents share the same hardware and software platform. The major different between DER and monitoring agents is that the monitoring agents do not have DER control functions. DER agents link to DER controllers to manipulate active power output for regulating the bus voltage within the normal ranges. Monitoring agents are installed in important electrical nodes where DER is not integrated. In LVDC radial distribution systems, monitoring agents should be located at the end of the distribution lines because these locations usually have the minimum voltage in the LVDC distribution lines. Without the information of the end of the lines, the accuracy of power flow analysis can be degraded.
The master agent determines the control command for the AC/DC converter controller and has responsibility to coordinate multiple agents to accomplish efficient voltage compensation. The proposed control schemes for the master and local agents are described in detail in the following sub-sections.
3.2. Ovaerall Voltage Control Process Based on Multi-Agent System
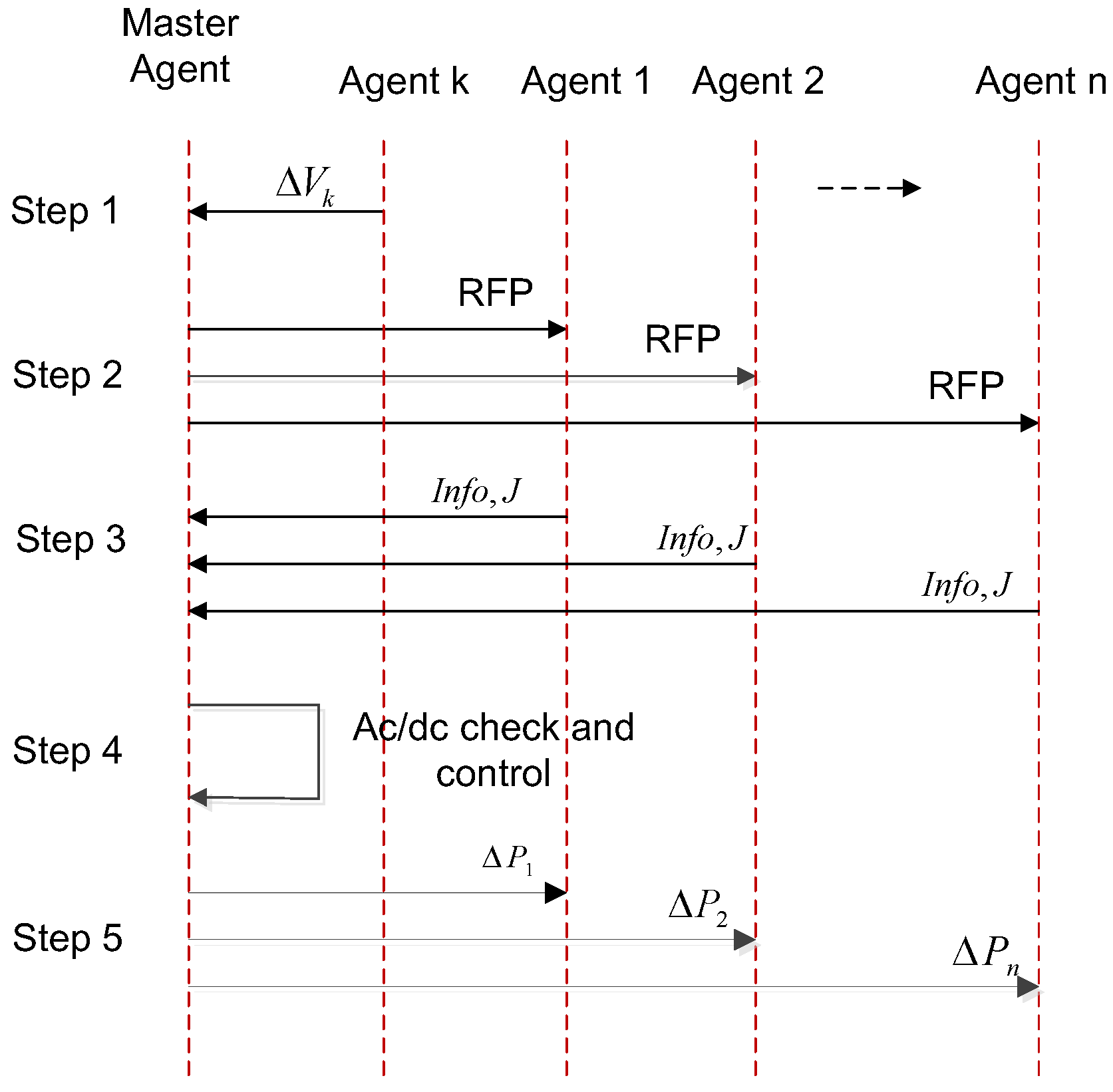
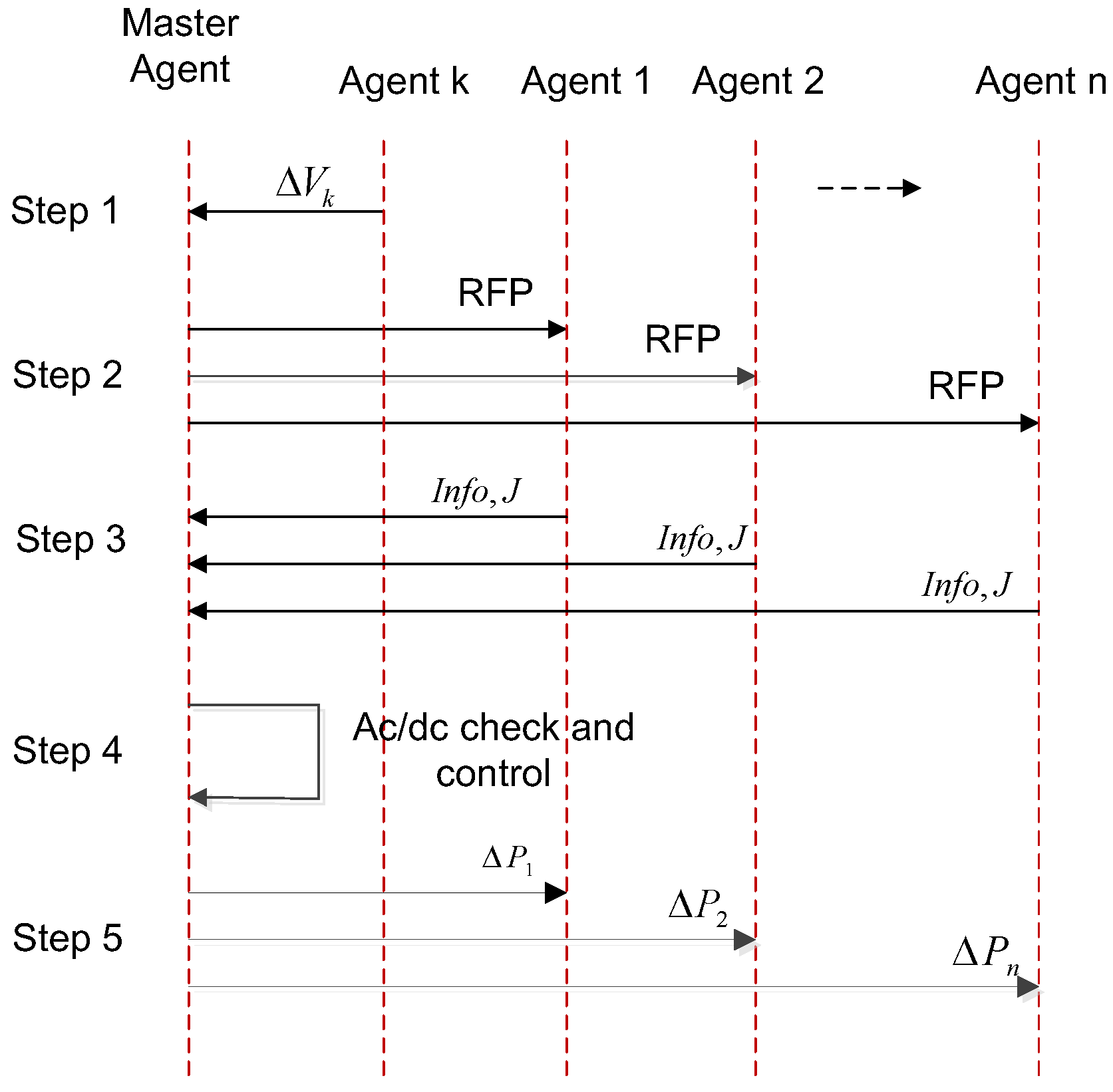
In this sub-section, we explain the control hierarchy of the proposed system and communication configuration between multiple agents for common tasks. Physically, the MAS-based control network uses the Ethernet protocol so that the system is easily scalable to the size of the system. The decision-making procedure of the overall MAS network is implemented using CNP, which is based on request-for-proposal (RFP) and bidding process [
20]. The overall voltage control process is summarized in
Figure 5.
Step 1: In normal state, all the agents operate in monitoring mode and measures local voltages. If the measured voltages exceed the normal limits, which is normally ±5% of the rated voltage, the local agents inform the master agent of the voltage problem via request messages with the voltage deviation (ΔVk).
Step 2: The master agent requests for voltage control proposals to all DER agents. The process begins with issuing a request-for-proposal (RFP).
Step 3: Local agents respond to the RFP by sending their bidding information to the master agent. The bidding data include bus voltage, line current, active power margin of the DER, line power flow and a part of the Jacobian matrix of the system. If there is a “virtual bus” defined next to the local agent, the local agent estimates the data of that virtual bus and send them to the master agent. The virtual bus and estimation algorithms will be defined in next section.
Step 4: When the bidding data of local agents arrives, the master agent constructs the Jacobian matrix of the system and decides the best solution for voltage control. The master agent computes the reference value of the AC/DC converter and checks whether the AC/DC converter is available for the reference value or not. If not, the control process goes to step 5.
Step 5: The master agent decides the participation of DERs according to the results of sensitivity analysis. Then, it assigns the tasks to the selected DER agents. In this step, the task is given as an amount of active power injection of the DERs.
If the voltage compensation is not enough due to any errors, the voltage control process is repeated until the amount of ΔVk becomes less than a certain threshold line 0.001 p.u.
3.3. Computaion of Local Agent
This sub-section explains how the agents compute the data using distributed computation method based on MAS-based control network.
3.3.1. Computation of Jacobian Matrix with Distributed Algorithms
Power flow analysis using Newton-Raphson method needs the Jacobian matrix of the system. The Jacobian matrix in a DC power system represents the first derivative relationship between active power and bus voltages. Therefore, the inverse of the Jacobian matrix means the sensitivity of the bus voltages over the injected active powers to the corresponding buses. Here, we define the elements of the inverse of the Jacobian matrix as
VSFs. This value can be derived from small-signal linear model of power flow equations as:
where
J is the Jacobian matrix corresponding to derivations of the active power from the bus voltage magnitude. The full equation of Jacobian matrix is obtained as follows:
Diagonal elements:
where
N is the number of buses,
and
are the bus voltages at the
i-th and
j-th nodes, respectively. The bus conductance matrix
G is defined as:
where
is the conductance of the line between
i-th and
j-th buses. The conductance matrix is similar to the bus admittance matrix for an AC distribution system and the only difference is absence of reactance components.
Then, we can obtain
VSF that define the voltage sensitivity against power injection. Equation (7) defines the
VSF between the voltage at the
i-th bus and the power injection at the
j-th bus as:
where
is the element of
i-th row and
j-th column of the inverse of the Jacobian matrix.
Equation (4) shows that to obtain the diagonal elements of the Jacobian matrix, we must gather two types of information, namely the bus voltages and line resistances of all the buses and the lines at the same time. Generally, energy management systems (EMSs) suffer a significant communication burden to collect those data in the central controller. In addition, EMSs also need to screen bad data due to sensing errors or communication failure using state estimation algorithms.
In this paper, we propose a new algorithm to calculate the Jacobian matrix with distributed computation manners using multiple agents. The voltages of the other nodes in (4) can be replaced by the line currents that can be locally measured by the local agent as:
where,
is the line current from bus
i to the adjacent bus
k;
is defined as ‘−1’ for outgoing current, ‘1’ for incoming current. Then, from (3) and (8), the local agent at bus
i can calculate the
i-th row of the Jacobian matrix only using locally measured data. Therefore, the cooperation of local agents can construct the complete Jacobian matrix.
3.3.2. Data Related to Power Flow and Power Margins of Distributed Energy Resources
The power margin of a DER can be obtained by monitoring its power output of DER as:
where
is the power margin of the DER at bus
i;
and
are the rated and output powers of the DER at bus
i, respectively.
The line power flow between buses
i and
j can be obtained as:
where
and
are the bus voltage at bus
i and the bus current between the buses
i and
j measured by local agent located at bus
i, respectively.
3.3.3. Estimation of System Parameters for Virtual Buses
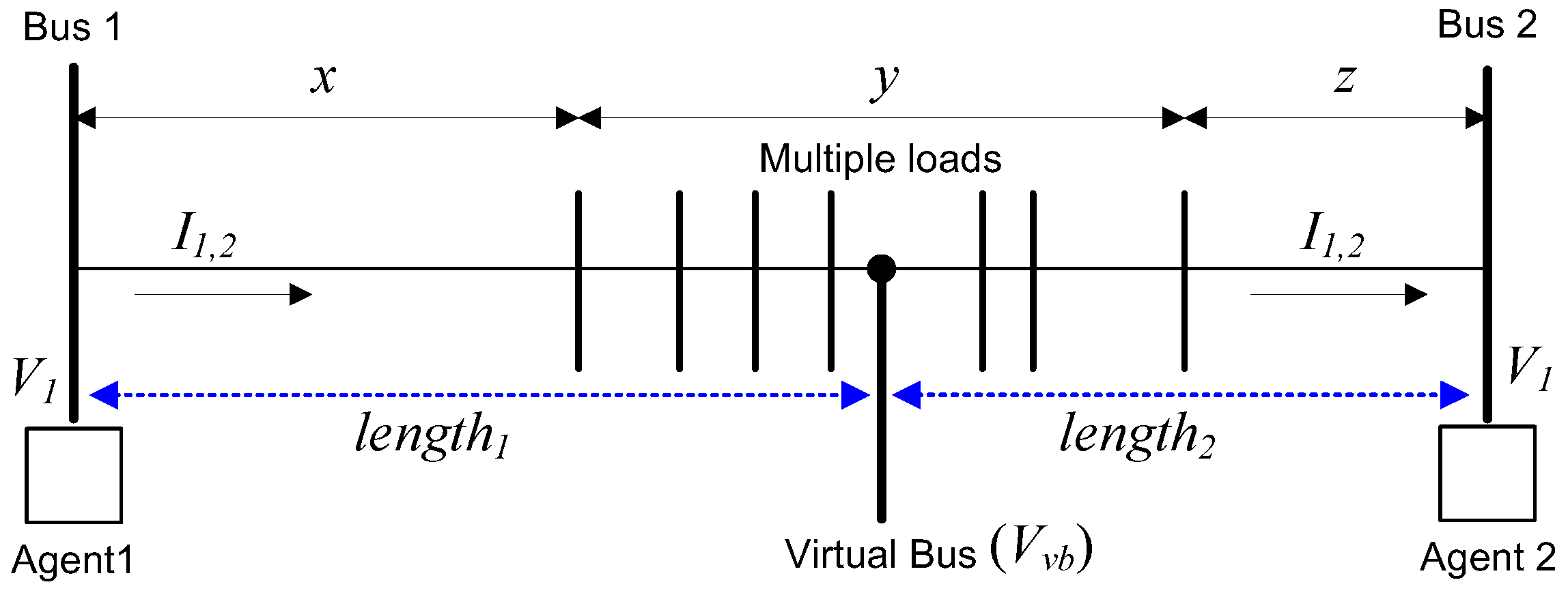
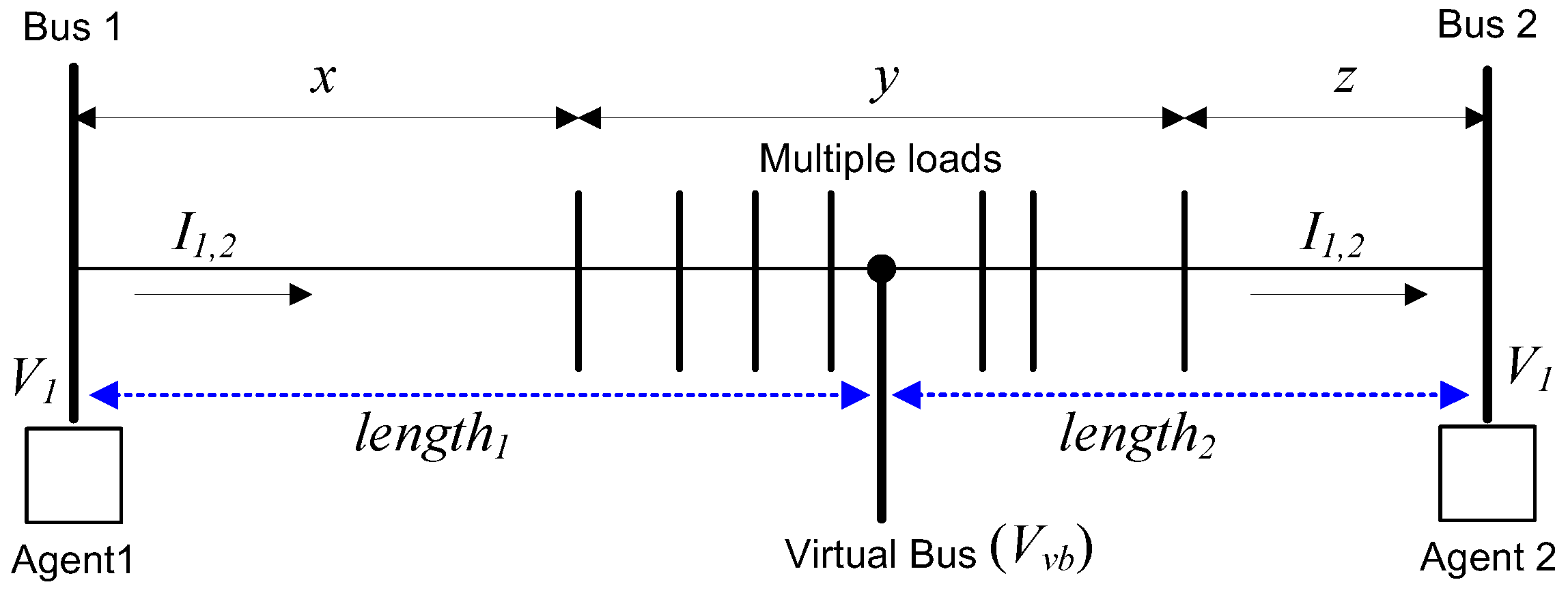
Because of economic issues, we need to select a limited number of locations for local agent installation. The appropriate locations of the local agents are the points of DER connection for DER agents and the ends of the distribution lines for monitoring agents. This means that some buses in the distribution line are not directly monitored by local agents. Because the number of monitoring buses is reduced, the dimension of Jacobian matrix can be reduced and the computation burden is also relieved. However, this may cause inaccuracy to power flow and voltage sensitivity analysis. To solve this problem, we propose the concept of “virtual bus” that is assumed to be located between two local agents in distribution line as illustrated in
Figure 6. The estimation process can be done by the agents at both sides. Here, we propose how to define the location of the virtual bus and to estimate the voltage at the virtual bus.
Assume that multiple loads connected between two agents can be concentrated in the middle of the two nearest loads from the agents as shown in
Figure 6. Then, define the variables related to the lengths:
L is the total length between two agents;
length1 and
length2 are the distances of the virtual bus from buses 1 and 2, respectively. The distances
length1 and
length2 are obtained as:
where
x and
z are the distances from bus 1 and bus 2 to its nearest loads, respectively,
y is the distance between these two loads. Then, the line resistances of
length1 and
length2 are obtained as:
where
is the line resistance per unit length in Ω/km.
The voltage at the virtual bus estimated by agent 1 (
Vvb1) can be given as:
Similarly, the voltage at the virtual bus can also be estimated by agent 2 (
Vvb2) as:
where
I1 and
I2 are the line currents measured by agents 1 and 2, respectively. Both Equations (16) and (17) estimate the voltage at the virtual bus using locally measured data.
When do we need to use virtual buses? There is a trade-off between the accuracy and the cost of the system. If there is a small load between agents, we do not need to consider a virtual bus for it because a new virtual bus can increase the dimension of Jacobian matrix. With multiple simulation studies, we found that two conditions need to be met for the use of virtual buses. First, the distance between distributed loads need to be longer than 10% of the total length of the distribution system. Second, total amount of loads between two agents need to be larger than 10% of the total loads in the system. Otherwise, like short distances or small loads, we do not need to consider to use a virtual bus.
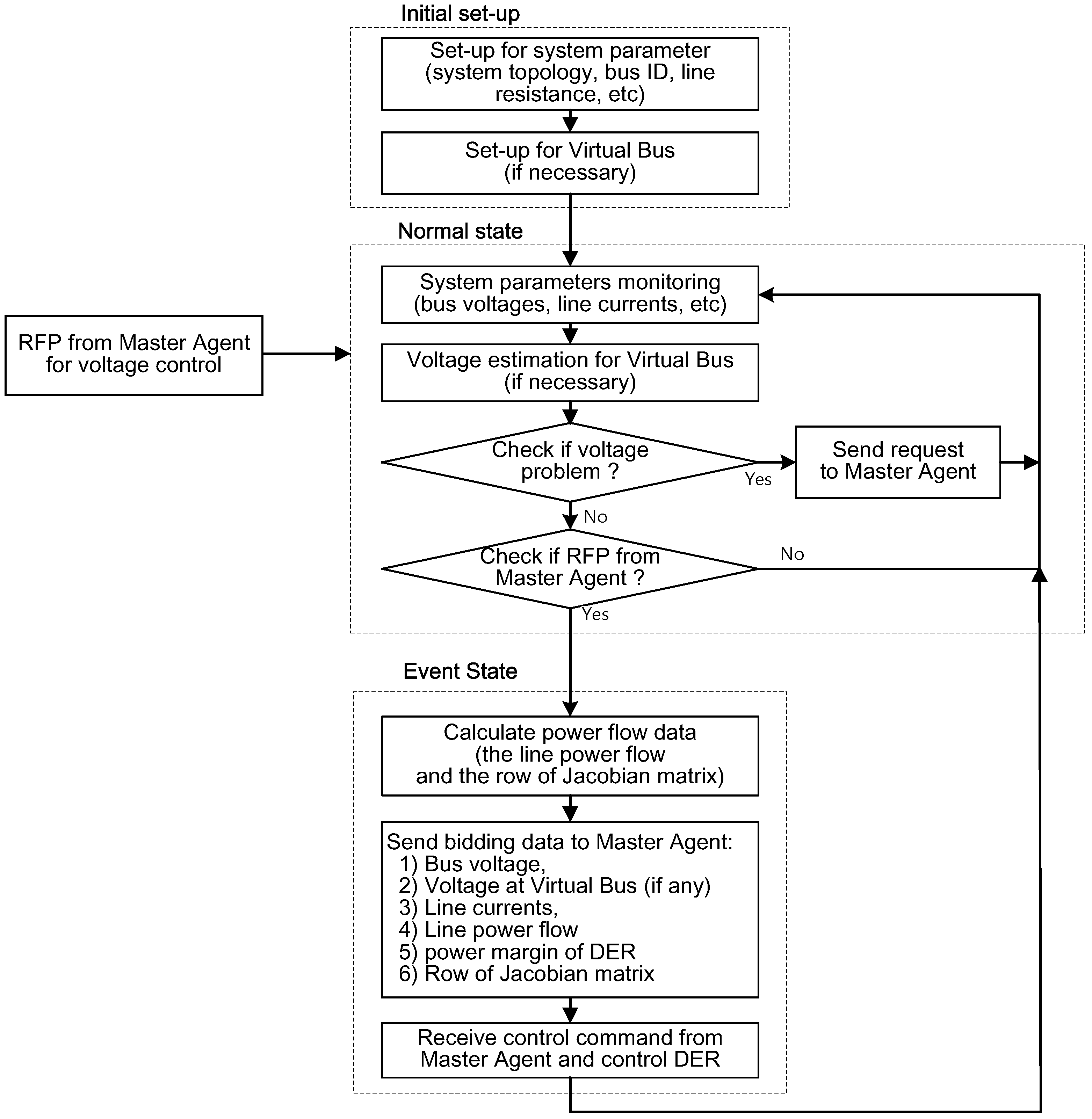
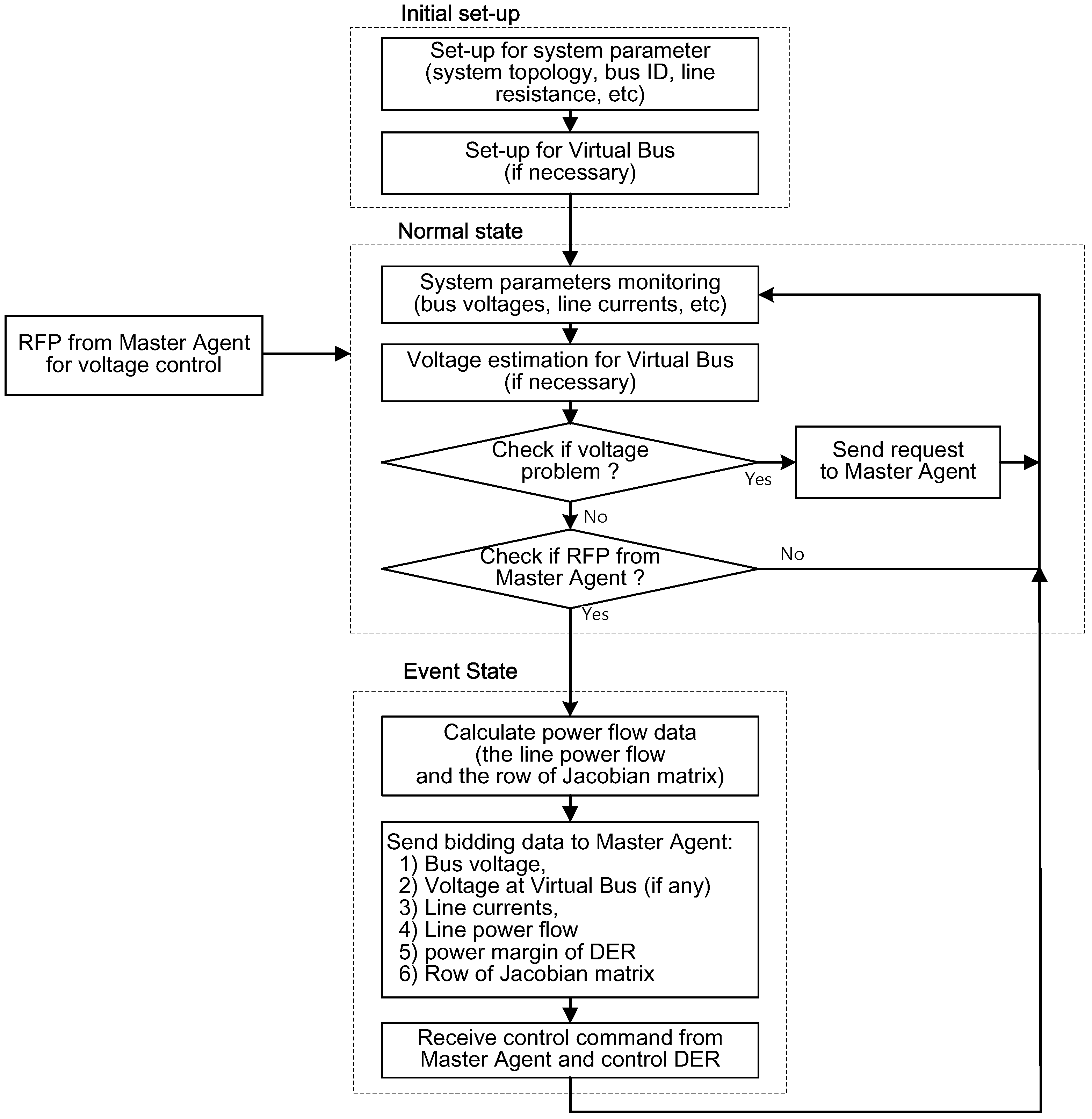
3.3.4. Computation Procedure of Local Agents
Figure 7 shows the flow chart of control procedures in local agents. In short, local agents have several responsibilities: (1) to check voltage violation problems; (2) to measure local power system data; (3) to calculate the corresponding row of the Jacobian matrix, line power flow, and active power margin of DER and (4) to estimate the voltage of the virtual bus based on local data. Then, send bidding data to the master agent for system-wise voltage control process. Local agents also send control signals to the DER to inject power into the system.
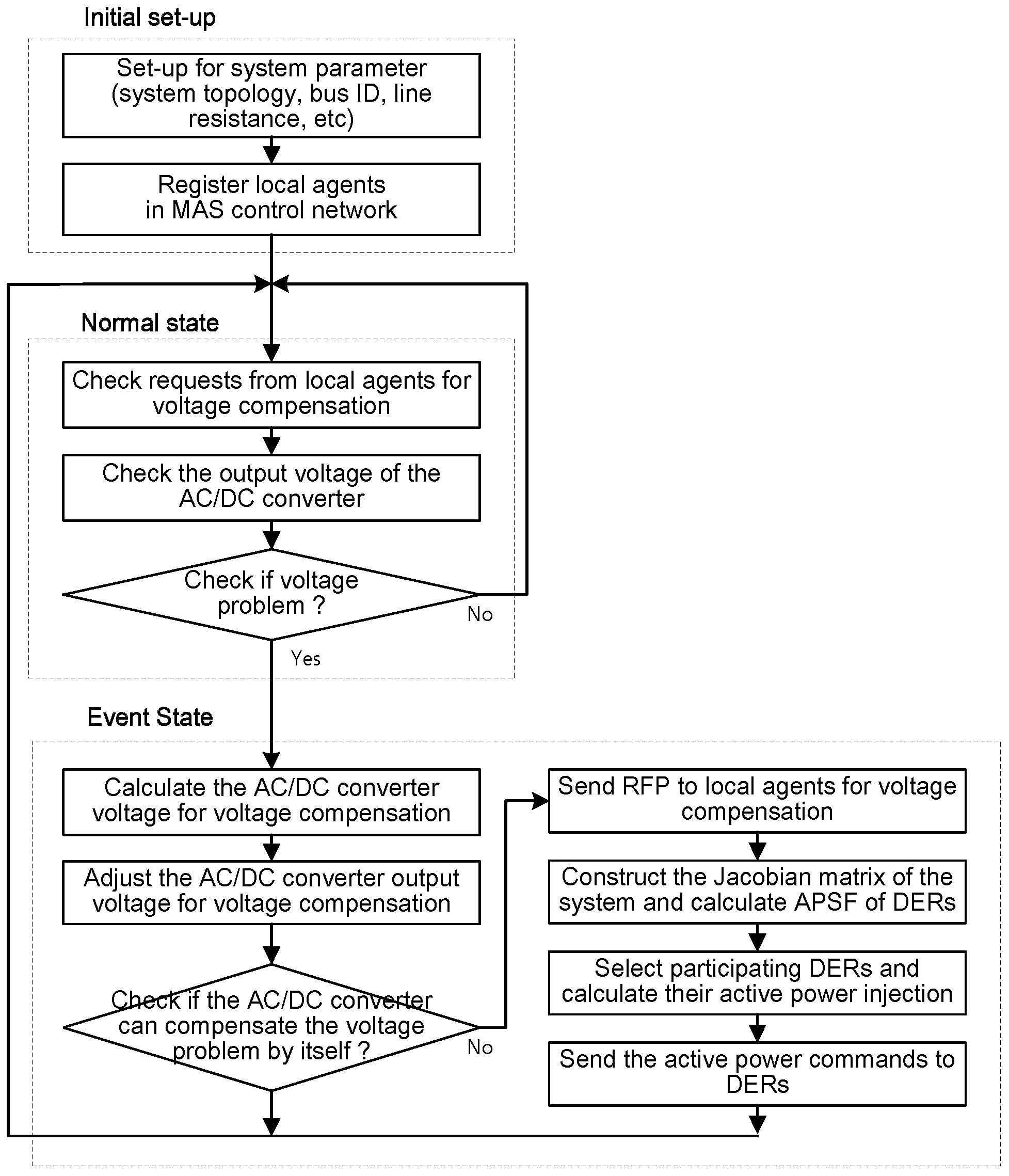
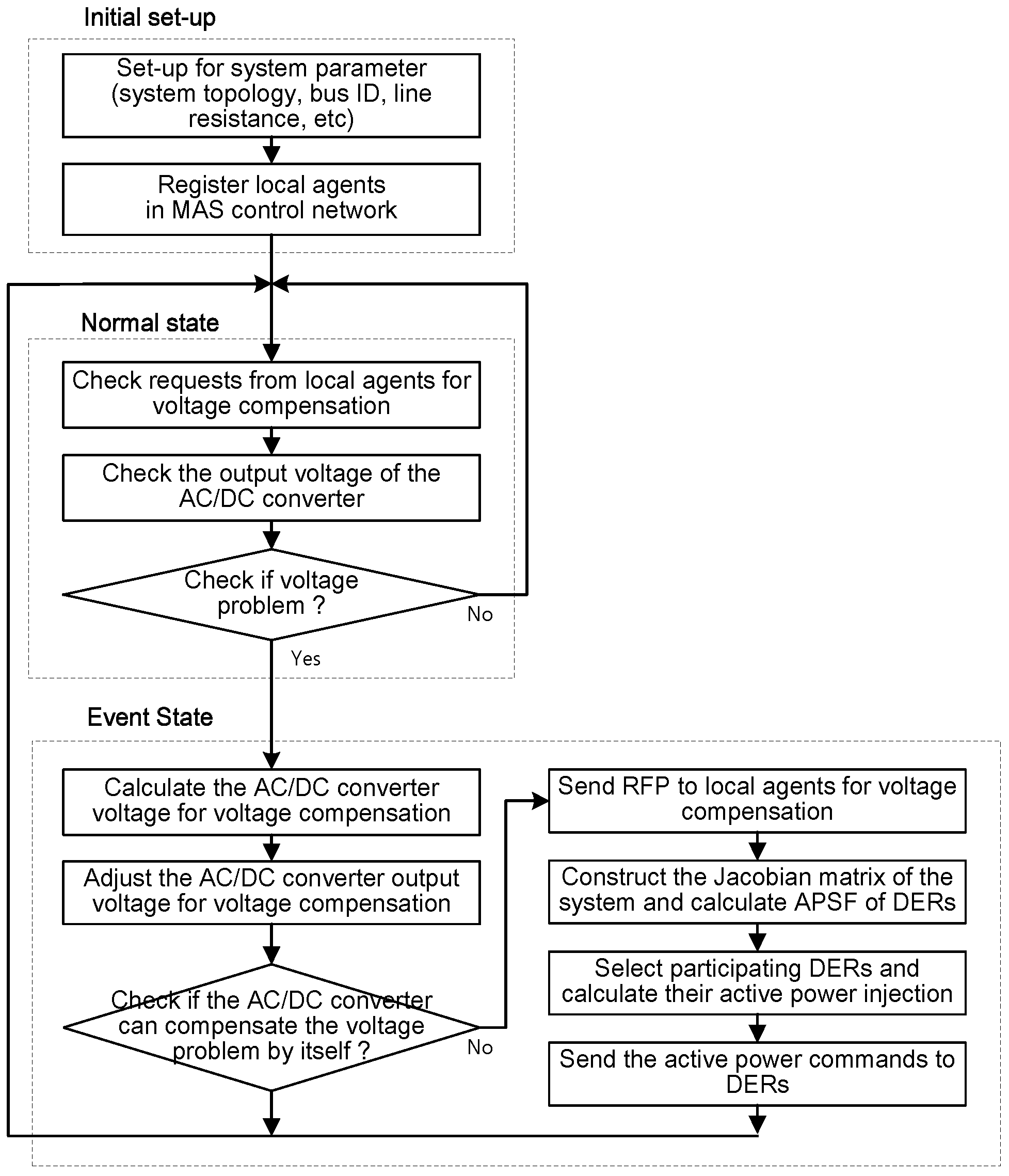
3.4. Control Procedure of the Master Agent
When a request for voltage restoration is transferred by local agents, the master agent first chooses the target bus that has the maximum voltage deviation from the normal range. In the proposed voltage control strategy, the master agent determines the reference value of the AC/DC converter and the power injection of DERs based on their bidding information.
The decision-making model of the master agent is the most important function that affects to the main concept of our voltage control algorithm. There are two criteria in the decision-making model of the master agent. First, the participation of the main AC/DC converter has priority to the control of DERs. Second, the master agent determines the participation of DERs in voltage control by comparing their VSFs.
Figure 8 shows the decision-making procedure of the master agent in detail. In this subsection, we propose the voltage control algorithm for the AC/DC converter first and then discuss how to determine the control command to DERs for voltage control.
3.4.1. Control Command for the AC/DC Converter
Let us define the node voltages at the (
k − 1)-th and
k-th buses as
Vk−1 and
Vk, respectively and the branch currents and the line power flows between (
k − 1)-th and
k-th buses as
Ik−1,k and
Pk−1,k, respectively as illustrated in
Figure 9.
Assume that
i-th bus is the target bus that has the maximum voltage violation exceeded the normal range. This means the
Vi is the minimum voltage in an undervoltage problem or the maximum voltage in an overvoltage problem. According to the proposed method, the first control action is to change the output bus voltage of the AC/DC converter to make the voltage at the target bus restored within the normal range. The master agent should calculate the new voltage control command of the AC/DC converter. Define that
Vinew is the voltage of the target bus that we want to restore after the AC/DC converter control and
Viold is the voltage before control. Then, the voltage difference at the target bus can be calculated as:
Similarly, the differential voltage at the (
i − 1)-th bus is also given as:
On the other hand, the voltage at the
i-th bus before and after the AC/DC converter control can be obtained from bus voltage and branch current measured at the (
i – 1)-th bus as:
where
is the line resistance between the (
i – 1)-th and
i-th buses. If the loads consume constant power, we can assume that the line power flows
Pi−1,i before and after the control action are almost the same. Then, we can obtain the equation about the line power flow between buses (
i – 1) and
i as:
With (22), we can rewrite (20) and (21) as:
From (18) to (24), we can obtain the following equation, which is a linear quadratic equation of
as:
The detail derivation process of (25) will be provided in
Appendix A at the end of this paper. In (25), the values of
and
can be measured by the local agent and
is a given value from the distribution system topology. When we apply the quadratic formula to (25), we can obtain
as a function of
as:
where the sub-functions
f1 and
f2 can be defined as:
From (26) to (28), it can be noted that in order to compensate the voltage at the target bus as much as
, we need to change the voltage at (
i − 1)-th bus as
. If we apply (26) up to the first bus where AC/DC converter installed using backward sweeping method, we can finally obtain the voltage change command of the AC/DC converter as:
where:
In (29) through (31), is the voltage measured at the AC/DC converter, and is the voltage change at bus 2 required for restoration in the target bus as much as . The value of P1,2 and r1,2 are the line power flow and line resistance between buses 1 and 2, respectively.
Finally, the voltage control command of the AC/DC converter can be obtained from (29) as:
If the margin of the output voltage of the AC/DC converter is smaller than , the AC/DC converter cannot fully compensate the voltage problem at the target bus. For example, consider a case that AC/DC converter already maintained the output voltage as 1.05 p.u. during undervoltage problem. Then, the AC/DC converter cannot increase the voltage more because the voltage at the AC/DC converter exceeds the upper level limit. Then, the master agent controls the AC/DC converter at the maximum value and activates power control of DERs for the remaining voltage control task.
3.4.2. Control Command for Distributed Energy Resources
As shown in
Figure 8, the DERs control is activated if and only if the voltage problem lasts after using AC/DC converter control. Then, the master agent selects DERs and then determines the active power output of the selected DERs according to bidding information such as the
VSF and real power margins of the DERs. The selection rule of DER is to choose the DERs that have larger
VSF values first. Then, we calculate the injection power of DER to compensate the target bus voltage within the normal range. The equation for determining the DER power is as:
where, bus
k is the target bus and
j is the bus index where the selected DER is connected. The variable
represents the voltage deviation of the target bus from the normal range and
is the required additional power injection from the DER. If the power margin of the selected DER is smaller than
, the voltage at the target bus cannot be fully compensated. Then, the master agent selects another DERs with the second largest
VSF value and similarly calculates the injection power command to compensate the remaining voltage deviation after the first DER control action. This process repeats until the voltage at the target bus is completely compensated.
5. Conclusions
This paper presented a new voltage control scheme for LVDC distribution system using coordination control between the main AC/DC converter and multiple DERs based on MAS. The proposed method distributes power flow analysis and decision-making procedure to multiple local agents. Since local agents can detect voltage problems in real time and refine raw data to system information of the overall system, the computation burden in the master agent can be significantly relieved. For example, the roles of the local agents are to monitor the local bus voltage and currents, to detect the voltage problem and to request the voltage compensation. Local agents also compute the power system data such as corresponding rows of the system Jacobian matrix, power margin of DERs, line power flow and so on. All the functions of the local agents can be implemented in an affordable microcontroller.
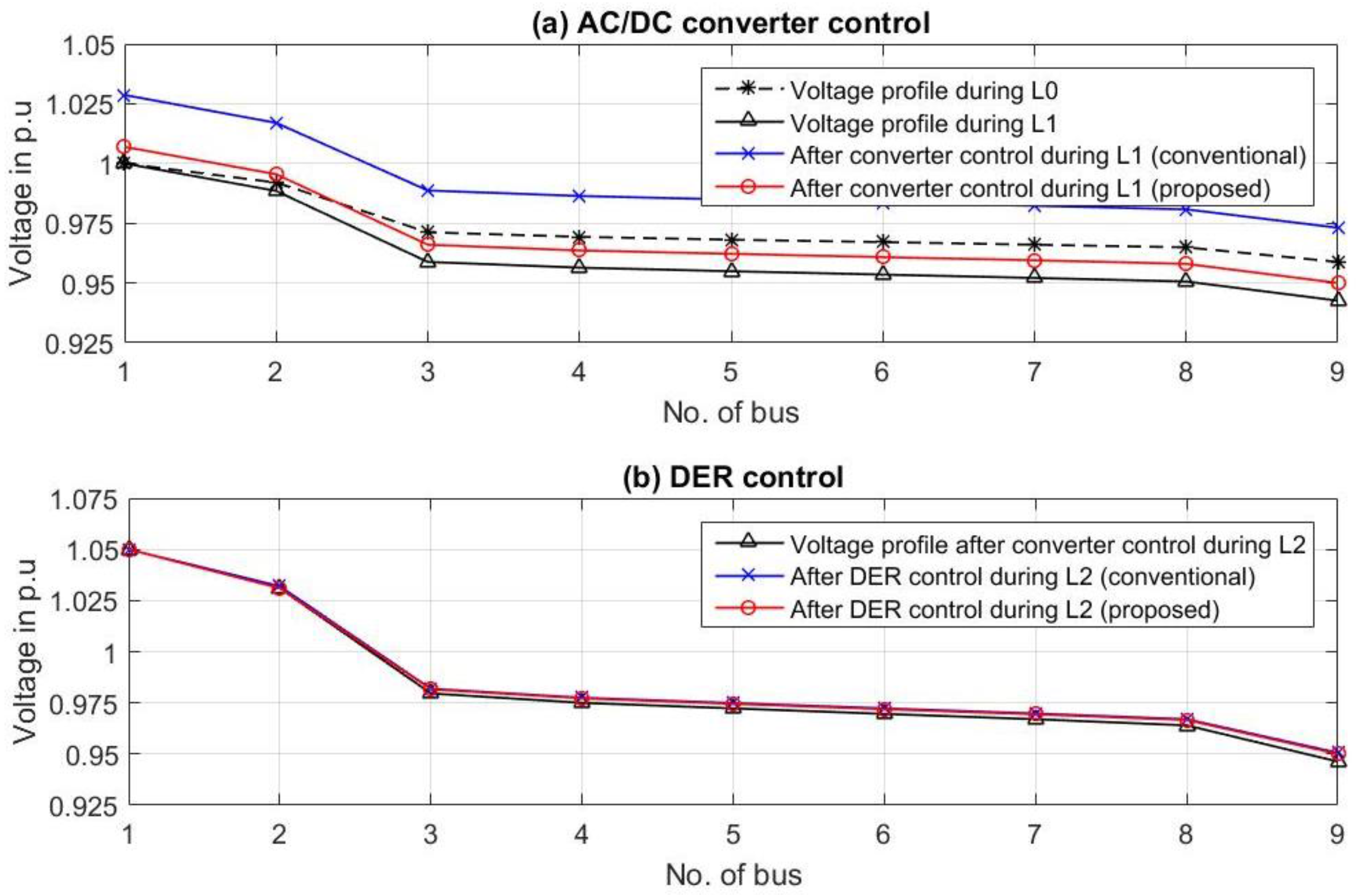
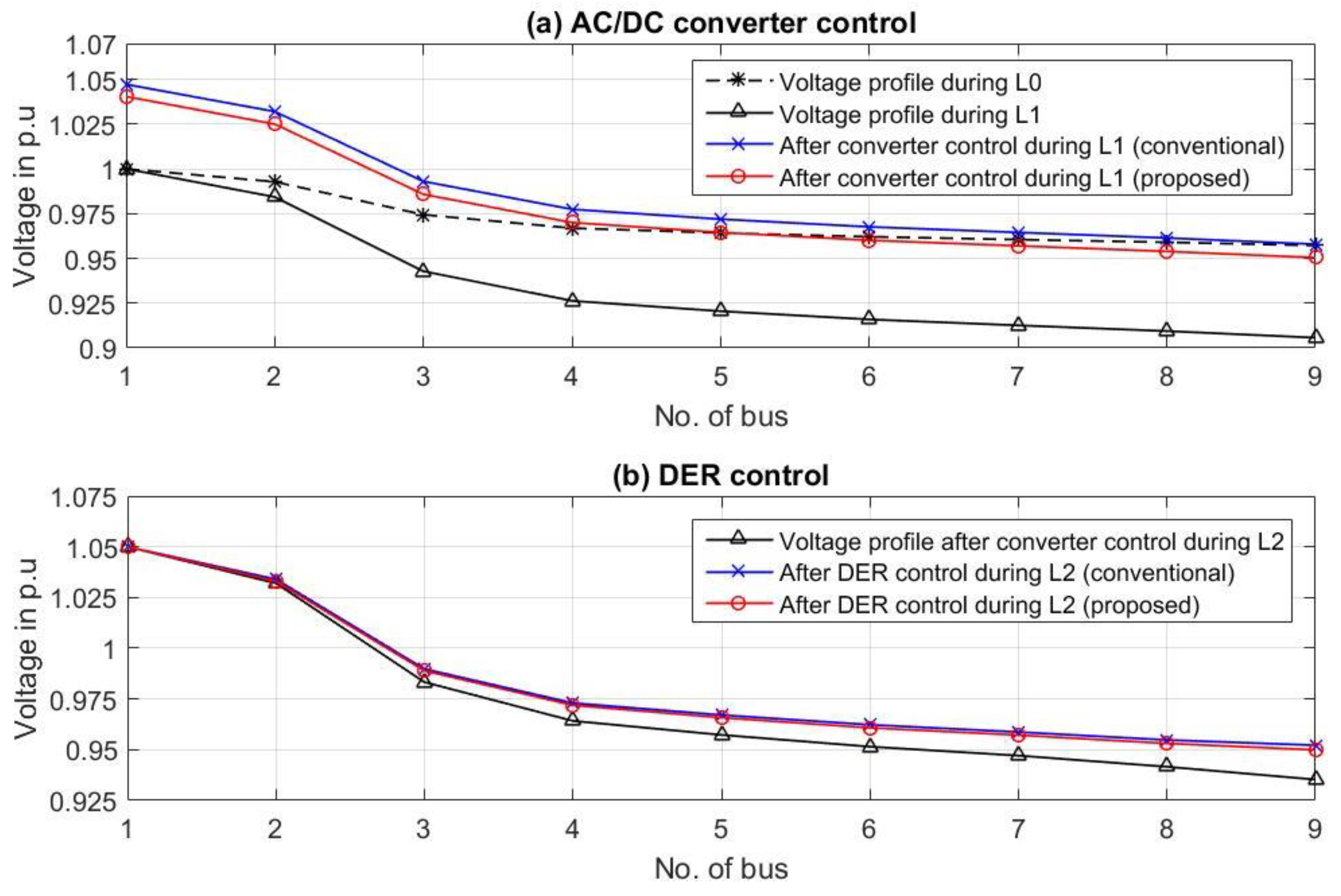
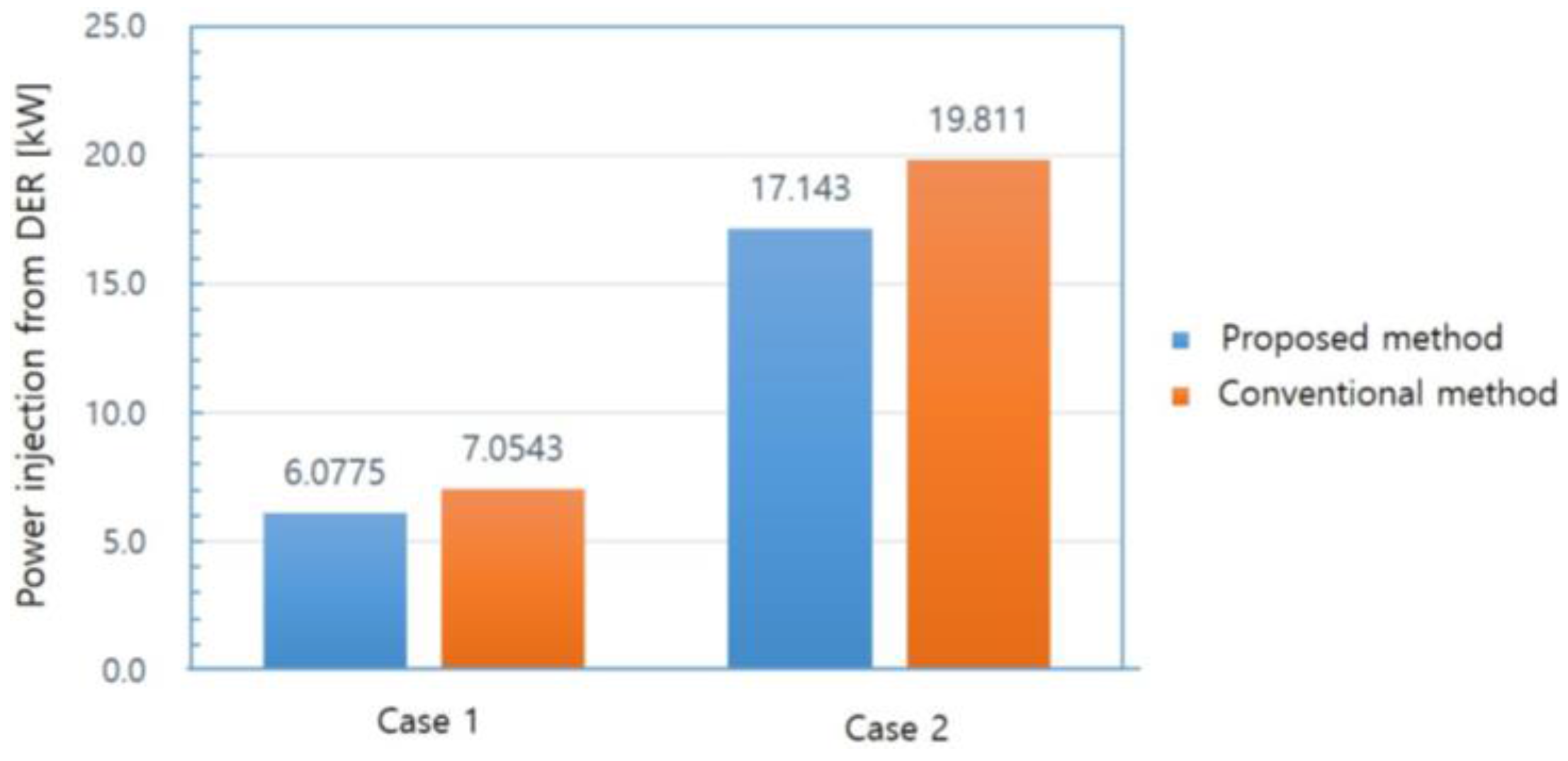
When a voltage problem occurs, local agents participate in the bidding process based on the CNP. This paper also proposed the definition of “virtual bus” and presented how to estimate the power system data of the virtual bus in the neighboring local agents. By using the virtual bus, we can use the data of unmonitored buses into the system analysis so that the proposed method can be more accurate. The proposed method is compared to the conventional method with case studies. Through the simulation results, it was numerically verified that the proposed method can solve voltage problems more accurately and use smaller control efforts than the conventional method.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}